第三章 数据采集常用程序设计

第三章数据采集常用程序设计
数据采集和处理是计算机在生产过程中应用的基础,任何计算机检测及控制系统都离不开信息的采集、处理及存储。两种典型的系统:
生产过程控制系统——工况数据采集、数据处理、决策输出、驱动执行机构;
检测监控系统——工况数据采集、数据处理、显示或描绘成曲线;
我们已经介绍过数据采集的硬件结构,本章主要介绍数据采集中一些常用的程序设计。
第一节计算机数据采集系统
一、计算机数据采集系统的任务
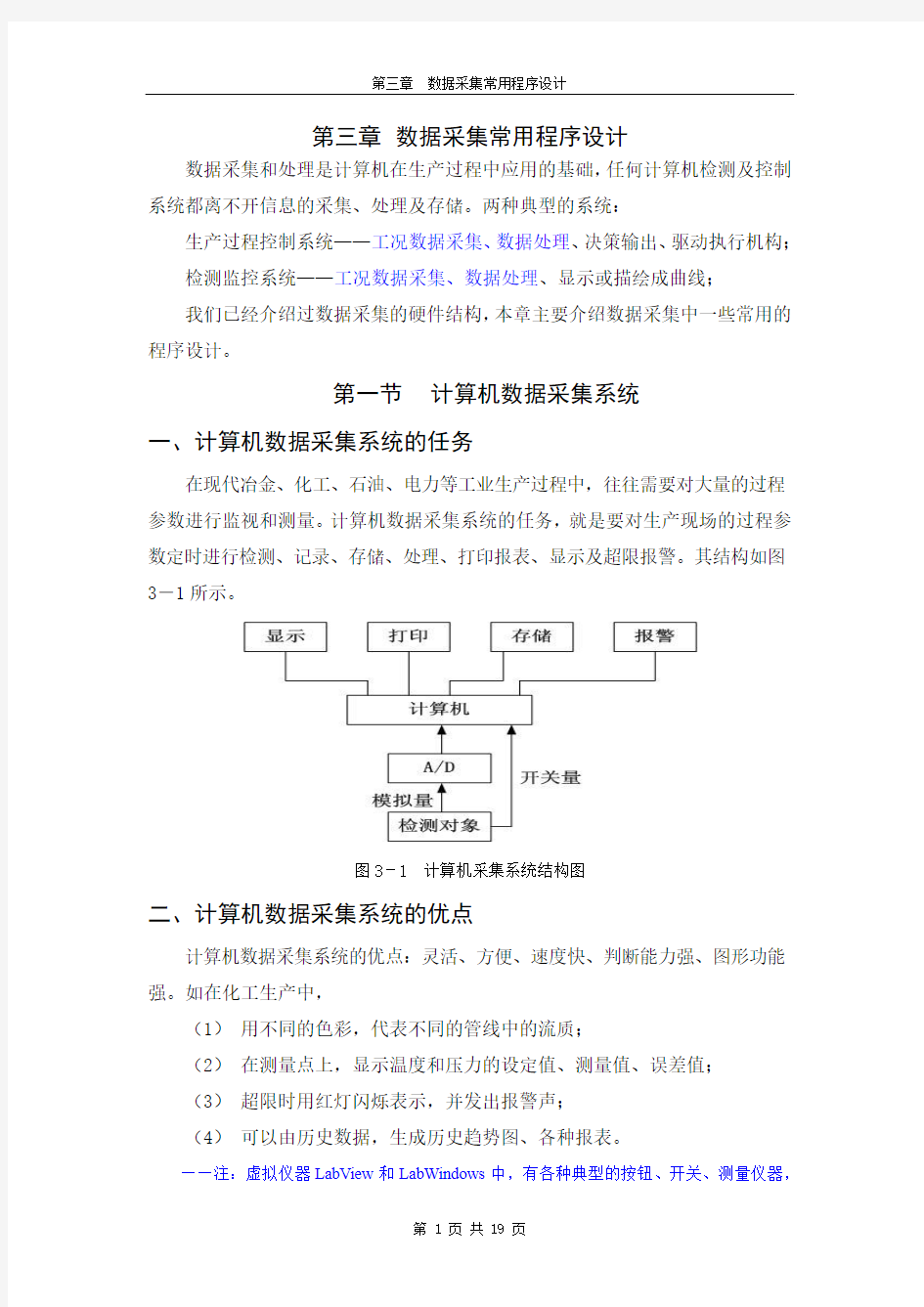
在现代冶金、化工、石油、电力等工业生产过程中,往往需要对大量的过程参数进行监视和测量。计算机数据采集系统的任务,就是要对生产现场的过程参数定时进行检测、记录、存储、处理、打印报表、显示及超限报警。其结构如图3-1所示。
图3-1 计算机采集系统结构图
二、计算机数据采集系统的优点
计算机数据采集系统的优点:灵活、方便、速度快、判断能力强、图形功能强。如在化工生产中,
(1)用不同的色彩,代表不同的管线中的流质;
(2)在测量点上,显示温度和压力的设定值、测量值、误差值;
(3)超限时用红灯闪烁表示,并发出报警声;
(4)可以由历史数据,生成历史趋势图、各种报表。
——注:虚拟仪器LabView和LabWindows中,有各种典型的按钮、开关、测量仪器,
可以刻度、曲线、表格、棒状图等多种显示数据。该开发平台是图形化编程,适合工程人员使用。
三、计算机数据采集常用程序
计算机数据采集中的常用程序,包括中断、定时器、采样、看门狗、判断、上下限报警、LED数码管显示、小型行列式键盘控制等。
以数字信号处理器TMS320C24X为例,介绍常用的中断、定时、采样、看门狗的程序设计知识;以单片机MCS-51系列为例,介绍判断程序设计。
第二节中断程序设计
一、中断分类
图3-2 中断分类图
从中断的来源看,分为硬件中断和软件中断;从中断是否可屏蔽来看,分为可屏蔽中断和不可屏蔽中断。
1、硬件中断和软件中断
硬件中断是由DSP的硬件所产生的中断,可由DSP的外部中断引脚(6个)产生,也可由DSP自身的外围设备产生(如定时器、A/D转换器、串行通信接口)。
软件中断是由DSP的指令产生的,如INTR、TRAP、RESET等。
2、可屏蔽中断和不可屏蔽中断
(1)可屏蔽中断:可以用软件来屏蔽或者使能的硬件和软件中断。
(2)不可屏蔽中断:中断不能够被屏蔽,DSP总是响应的中断。
二、中断优先级和向量地址
1、优先级
DSP的所有中断被赋予1~10的优先级(1为最高级)。当有多于1个的中断被挂起等待响应时,中断按照优先级别从高到低依次被响应。
所有的软件中断和硬件中断,都对应于某一个优先级。
2、向量地址
在DSP中有专门的I/0空间,存在着一系列中断向量地址,每一个优先级都对应相应的中断向量地址。
中断向量地址为两个字长,可存储跳转指令。当中断到来时,中断向量地址被加载到程序计数器,从而获取跳转指令,跳转到相应的中断处理子程序。
三、相关的寄存器
1、中断屏蔽寄存器(IMR)
IMR包含所有可屏蔽中断的屏蔽位,用于设置和读取中断的屏蔽状态。
(1)读IMR寄存器可以识别出已被屏蔽或未被屏蔽的中断。
(2)为了能够响应中断,把IMR相应位设置为1;屏蔽中断时,把IMR相应
位设置为0。
(3)复位时,IMR所有位都被设置为0,屏蔽掉所有可屏蔽的中断
2、中断标志寄存器(IFR)
IFR中包含所有可屏蔽中断的标志位,可以识别和清除有效的中断。
当一个可屏蔽中断被请求时,IFR的相应的标志位被置1,指示中断正在被挂起或者等待响应(不论是否被CPU响应);当中断未被屏蔽时,如果IFR的相应位是1,则该中断将被CPU响应。
下列情况中断标志都将被清除:
(1)系统复位
(2)中断得到处理
(3)把1写到IFR的相应位,使其变成0,即可清除尚未处理完的中断
四、中断操作步骤
1、初始化
设置中断屏蔽寄存器IMR,开启需要的中断,屏蔽不需要的中断;
2、接收中断
当硬件或软件指令产生中断请求时,IFR寄存器中相应的中断标志位被置位;
3、响应中断
(1)CPU根据中断屏蔽寄存器的设置,决定是否响应中断;
(2)若允许响应中断,CPU根据中断标志寄存器的标志位,装载中断向量地址;
(3)从中断向量地址存储的跳转指令,跳转到相应的中断服务子程序;
(4)执行中断服务程序(需考虑保存、恢复寄存器的数据)。
蓝色的表示自己需要编写程序
第三节定时器程序设计
可采用软件方式和硬件方式,达到定时的目标。
一、软件定时程序
依据:
1、执行指令需要时间;
2、如果知道CPU的时钟频率,就可
以计算出每一条指令的所需时
间;
3、通过内循环次数、外循环次数、
指令数,可以计算出定时时间
图3-3 软件定时程序流程图
二、硬件定时程序
TMS320C24X有三个通用定时器Tx(x=1、2、3),能够独立使用,自动计数。
1、时钟
(1) CPU时钟:最重要的时钟,决定CPU的指令周期,由专门的时钟源产生;(2)通用定时器时钟:可由CPU时钟分频获得;
2、控制寄存器
(1)时钟控制寄存器(CKCR)
通过设置CKCR决定CPU的时钟模式,可以直接使用外部时钟、或者倍频外部时钟。
(2)定时器控制器(TxCON,x=1、2、3)
每个定时器都有一个控制器,可以设置该定时器的时钟频率(对CPU时钟分频)和计数模式。
(3)比较寄存器(CMPRx,x=1、2、3)
存储着设定的计数值,当通用定时器的数值和比较寄存器相等时,将产生中断事件。
3、通用定时器Tx的计数模式(6种)
图3-4 计数模式示意图
(1)停止/保持模式
通用定时器的操作停止,保持当前状态。
(2)单增模式
通用定时器按照规定频率的输入时钟计数,直到定时计数器的值与比较寄存器的值匹配为止。匹配之后的下一个输入时钟的上升沿,通用定时器复位为0并且禁止继续计数。
(3)连续增模式
通用定时器按照规定频率的输入时钟计数,直到定时计数器的值与比较寄存器的值匹配。匹配之后的下一个输入时钟的上升沿,通用定时器复位为0,重复上述操作。
(4)定向增/减模式
由引脚TMRDIR来确定计数方向。
当TMRDIR保持高时,通用定时器将增计数,直到计数值与比较寄存器的值
匹配为止。
当通用定时器的计数值与比较寄存器值相等,并且TMRDIR保持高时,定时器保持该值。
当TMRDIR保持低时,通用定时器将减计数,直到计数值为0。
当通用定时器的计数值为0,且TMRDIR保持低时,定时器保持为0。(5)单增/减模式
通用定时器按照规定频率的输入时钟计数,直到定时计数器的值与比较寄存器的值匹配。然后通用定时器改变它的计数方向,直到0为止。当通用定时器为0时,停止计数并保持它的当前状态。
(6)连续增/减模式
每个周期与单增/减模式相似。当通用定时器复位为0时,重复单增/减模式下的操作。
3、定时器的使用
(1)初始化:设置CPU时钟(时钟控制寄存器)、定时器时钟、计数模式(定时器控制器)、比较寄存器的值。
(2)启动定时器。
(3)当定时器计数值和比较寄存器的值相等时,产生中断。
(4)处理中断。
第四节采样程序设计
一、概述
1、TMS320C24X的A/D转换模块,包括两个带有内部“采样—保持”电路的A/D
转换器,其字长为10位;
2、每个A/D转换器有816个模拟量输入;
3、每八个模拟输入通道,通过8到1的多路开关,给A/D转换器提供数据;
4、两个A/D
5、A/D
6、转换可以由A/D转换器自身启动,也可以由通用定时器的中断事件启动;
二、转换结果
A/D转换模块的基准电压由外部提供,被测信号通过传感器转换成电压信号,作为输入电压。
转换结果=1024×(输入电压/基准电压)
三、转换时间
A/D的“采样-转换”需要6个模数转换周期,最少是6u s的时间。满足下列公式:
系统时钟周期×A/D的倍频系数×6 >= 6u s
四、相关寄存器
1、模数转换控制寄存器1
用于控制转换启动、终止转换、选择模数转换模式、选择转换通道。
2、模数转换控制寄存器2
用于设置A/D转换的倍频系数、标识模数转换结果寄存器是否有内容。
3、模数转换结果寄存器
A/D转换结束时,将产生A/D转换中断。转换结果寄存器是一个两级的FIFO 寄存器,储存对应的A/D转换器的转换结果。
4、通用定时器控制寄存器
用于决定由哪个定时器、采用该定时器的何种中断事件来启动A/D转换。
五、A/D转换器的使用——由定时器启动
1、通过模数转换控制寄存器1,设置A/D转换模式、选择转换通道;
2、通过模数转换控制寄存器2,设置A/D转换的倍频系数;
3、通过通用定时器控制寄存器,设置由哪个定时器的中断事件来启动A/D转换;
4、定时器中断到来时(即采样周期到来时),启动A/D转换;
5、A/D转换结束时,产生A/D转换中断;
6、在A/D转换中断子程序中,从模数转换结果寄存器中取出A/D转换结果,进
行处理。
(一节)
第五节看门狗程序设计
看门狗(Watch Dog)在CPU异常时、或者软件进入一个不正确的循环时,实现系统复位功能。
一、相关寄存器
1、WD计数寄存器
是一个8位可以复位的增数计数器,当WD定时器溢出时会导致系统复位,从而解除系统的软件错误和CPU崩溃。
2、WD定时器控制寄存器(WDCR)
设置WD计数寄存器的时钟频率。
3、WD复位关键字寄存器(WDKEY)
向WDKEY首先写55H、接着写AAH,将清除WD计数寄存器的值。除此以外,任何组合都不能复位WD计数寄存器。
二、看门狗的使用
1、设置WD计数寄存器的时钟频率
2、启动WD计数寄存器
3、在适当的主程序或者分支程序中,向WDKEY首先写55H、接着写AAH,清除
WD计数寄存器的值。
第六节判断程序设计
判断程序就是分支执行程序。程序在执行时,首先判定给定的条件是否满足,根据判定的结果(真或假)再执行相应的操作。例如:
在转速控制系统中,电机的恒速运转一般是通过控制输入电压来实现的。首先检测出电机的实际转速,再比较电机的实际转速和给定转速。(1)如果电机的转速低于给定转速,就需要增加输入电压;(2)如果电机的转速高于给定转速,就需要降低输入电压。
重点介绍三类判断程序的设计思路:
1、
2、1或0的判断;
3、
我们以单片机MCS-51系列为例,介绍判断程序的设计方法。
一、相关寄存器介绍
1、累加器ACC
是一个八位寄存器,它是CPU中工作最频繁的寄存器。
在进行算术、逻辑运算时,累加器ACC往往在运算前暂存一个操作数(如被加数),而运算后又保存其结果(如代数和)。
范围:无符号数——0~255;有符号数——-127~128。
2、标志寄存器PSW
也是一个八位寄存器,用来存放运算结果的一些特征,如有无进位、借位等。
图3-5 PSW的位定义
平常我们最关心的是以下四位。
(1)进位标志CY(PSW7)
它表示了运算是否有进位(或借位)。如果操作结果在最高位有进位(加法)或者借位(减法),则该位为1,否则为0。
(2)辅助进位标志AC(PSW6)
又称半进位标志,它反映了两个八位数运算低四位是否有半进位,即低四位相加(或减)有否进位(或借位)。如有则AC为1状态,否则为0。
(3)溢出标志位OV(PSW2)
反映运算结果是否有溢出。有溢出时,此位为1,否则为0。
(4)奇偶标志P(PSW0)
反映累加器ACC内容的奇偶性,如果ACC中的运算结果有偶数个1(如11001100B,其中有4个1),则P为0,否则,P=1。
二、算术判断程序
两个8位无符号数比较
?两个8位有符号数的比较
?两个16位无符号数比较
1、两个8位无符号数比较(M、N)——根据进位标志
CLR CY ;进位标志清零
MOV A,M ;A←M
SUBB A,N ;求M-N
JZ EQU ;累加器A=0,则M=N,转EQU
JC LESS ;CY=1,有借位,则M BIG: M>N处理程序;无借位,则M>N,执行BIG处理程序 EQU: M=N处理程序 LESS: M 2、两个8位有符号数的比较——根据溢出标志和ACC的最高位 由于M和N均为有符号数, M和N两数在比较时,可能出现以下四种情况:(1)M>0,N>0, 即两数均为正数。 (2)M>0,N<0, 即M为正数,N为负数。 (3)M<0,N>0, 即M为负数,N为正数。 (4)M<0,N<0, 即两数均为负数。 判断两个8位有符号数的大小。 1)正数——最高位为0;负数——最高位为1; (2)溢出时,ACC最高位为1表示正溢出,ACC最高位为0表示负溢出; MOV A,M ;A←M SUBB A,N ;M和N 比较 JZ EQU ;M和N相等,转相等处理程序 JB PSW.2,FLOW ;判断是否溢出,有溢出则跳转FLOW JB ACC.7,LESS ;无溢出,且A的最高位为1,则M ;如(2)-(3)、(-2)-(3)、(-3)-(-2)AJMP BIG ;;无溢出,且A的最高位为0,则M>N,执行BIG程序 ;如(3)-(2)、(3)―(―2)、(-2)-(-3) FLOW: JB ACC.7,BIG ;溢出分为两种情况 ;(1)有溢出,且A最高位为1,表示正溢出 ;则M>N,执行BIG程序 ;如(126)-(-10) ;(2)有溢出,且A最高位为0,表示负溢出 ;则M ;如(-10)-(124) LESS: M BIG: M>N处理程序 EUQ: M=N处理程序 3、两个16位无符号数比较——根据进位标志 由于MCS-51系列的累加器只有8位,所以当进行两个16位无符号数比较时, CLR CY ;标志位清零 MOV A,MH ;A←MH MOV R2,NH ;R2←NH SUBB A,R2 ;高8位比较 JZ HEQU ;高8位相等,转低8位比较 JC LESS ;高8位不相等,有借位,转M AJMP BIG ;无借位,转M>N 理程序 HEQU: CLR CY ;标志位清零(高8位相等) MOV A,ML ;A←ML MOV R2,NL ;R2←NL SUBB A,R2 ;低8位比较 JZ EQU ;A=0,则M=N,转EQU JC LESS ;有借位,则M ;无借位,执行M>N 理程序 BIG: M>N处理程序 EUQ: M=N 处理程序 LESS: M 1、逻辑判断程序的设计步骤 (1)读入数据(开关状态或阀门的位置); (2)屏蔽不需要的状态位; (3)与所要求的状态比较; (4)判断比较结果,选择程序入口。 2、例子 图3-6 逻辑判断例子 图3-7 标志判断例子 图3-6中,A 、B 、C 、 D 表示4个开关,当四个开关均闭合时,顺序执行相应的程序,否则,继续检测。0) 逻辑判断程序清单: CHECK: MOV A,P1 ;读入开关状态 ANL A,#55H ;用0101 0101,屏蔽无用位 XRL A,#00H ;判断开关A 、B 、C 、D 是否全部闭合,全部闭合后为0 ;异或,相同为0,相异为1 JNZ CHECK ;若ACC 中不是0,结果也非0 ;表示开关A 、B 、C 、D 没全部闭合,继续检测 PROCESS: …………;全部闭合时,顺序执行相应的处理程序 1、标志判断的设计思想 根据某一设定的标志单元(或标志位)的状态,决定程序的执行方向。 2、例子 电机旋转方向控制程序流程图如图3-7所示。 FLAG BIT 00H ;设定00H为电机旋转方向控制位,FLAG代表该位 JB FLAG RIGHT ;FLAG=1,转RIGHT LEFT: …;FLAG=0,顺时针旋转控制程序 RIGHT: …;逆时针旋转控制程序 第七节上下限报警处理程序设计 报警程序主要有以下几个步骤组成: (1)采样被测参数; (2)比较采样值和给定的上下限; (3)根据比较结果执行相应的处理程序。 第八节 LED 数码管显示程序设计 一、LED 显示器件工作原理 图3-8 七段LED 数码显示器的结构 LED 显示器件是通过发光二极管显示字段的器件。在单片机控制系统中常用的是由7段LED 数码管,它的显示块中有8个发光二极管,7个发光二极管组成字符“8”,1个发光二极管构成小数点,因此有人称7段LED 数码管为8段显示器。LED 数码管的管脚配置如图3-8(a )所示。 LED 数码管有共阴极和共阳极两类。共阴极LED 数码管的发光二极管的阴极共地,如图3-8(b ),当某个发光二极管的阳极电压为高电平时,二极管发光;而共阳极LED 数码管是发光二极管的阳极共接,如图3-8(c ),当某个二极管的阴极电压为低电平时,二极管发光。 二、LED 显示方式 . I/O口段选控制 I/O口位选控制 图3-9 N 位LED 显示器构成原理图 在微机控制系统中,一般利用N 块LED 显示器件构成N 位LED 显示器。构成原理图如图3-9所示。通过I/O 口位选控制哪个LED 管显示,通过I/O 口段选控制所显示的数字。 LED 所显示的字符,与其段选码是一一对应的。 图3-10 7段LED 段选码 1. LED 静态显示方式 图3-11表示的是一个四位静态 LED 显示电路。 (1) 把所有LED 的3和8引脚串连起 来,根据共阳极或者共阴极,连接到+5V 或接地; (2)段选控制直接由不同I/O 口控制。 I/O 口。 图3-11 LED 静态显示电路 2. LED 动态显示方式 I/O(1) I/O(2) 图3-12 LED 动态显示电路 动态驱动显示接口特点是:将多位LED (即8 位中的所有同名段a接在一起,所有b段都接在一起……),用一个8位的锁存器来控制段码;另外用一个锁存器来控制点亮的位。因此需要2个8位的I/O 端口。 I/O端口输出相应字符的段选择码,决定要显示的字符;同时通过位选择码,控制要显示的位。如此循环下去,使每一位都显示该位应显示的字符,并保持延时一段时间(1~5ms),然后再选中下一位。利用发光显示器的余辉及人眼的视觉暂留特点,给人一种显示器同时被点亮的效果。 三、LED动态显示程序设计 图3-13 LED动态显示流程图 (1)缓冲区:存放显示的数;(2)数变成段码:由专门的译码程序实现。 第九节小型行列式键盘控制程序设计 键盘是一个由开关组成的矩阵,是重要的输入设备,在小型微机系统中,如单板微计算机、带有微处理器的专用设备中,键盘的规模小,可采用简单实用的接口方式,在软件控制下完成键盘的输入功能。 常用键盘的类型包括: ◆编码键盘:用硬件来识别、检测按了哪一键,并产生相应的代码 ◆非编码键盘:没有独立的硬件,用软件来识别按下的键、并产生代码 一、键盘工作原理 图3-14 键盘原理图 将各键连接成一个矩阵,即成n行×m列,各键分别连接于某个行线与某个 列结之间。当某个键按下时, 因此通过扫描程序, 可判明按键位置(位置码、扫描码),再转换为按键编码。为了方便键处理程序的设计,一般采用依次排列键值的方法,以保证键值和键号一致。 二、编码键盘 图3-15 编码键盘电路连接 8279和51系列的单片机的连接非常简单,当有键按下时,8279内部由硬件自动生成一个与之相应的代码。 三、键盘扫描程序设计 较常用的键盘扫描的工作方式有“编程扫描方式”和“中断扫描方式”两种。 1、编程行扫描方式原理及程序流程图 图3-16 用锁存器连接的键盘接口(4×4) 将行线接输出口,列线接输入口。采用行扫描法: (1)先将某一行输出为低电平,其它行输出为高电平,用输入口来查询列线上的电平。 (2)逐次读入列值 <1> 如果行线上的值为0时,列线上的值也为0,则表明有键按下。 <2> 由行与列的交连信号,确定某闭合键的坐标,即得到被按键对应的 扫描码。 <3> 主程序调用译码程序,将扫描码翻译为相应键的编码信息。 <4> 否则,接着读入下一列,直到找到该行有按下的键为止。 (3)如该行没有找到有键按下,就按此方法逐行找下去,直到扫描完全部的行和列。 扫描键盘应注意的问题: 消除键的抖动:在认可键号之前,程序中插入一段延时,让开按键机械抖动的周期,形成正确的键号。 2、中断扫描工作方式 盘 图3-17 中断扫描的接口电路(4×4) (1)键按下时,产生中断信号; (2)通过读P端口的4~7,可以直接确定行; (3)在INT1中断服务程序中,通过判断P端口的0~3位,可以确定列; (4)由行列组合成扫描码。 双通道同步数据采集系统的设计与实现 作者:徐灵飞, 李健, Xu Lingfei, Li Jian 作者单位:成都理工大学工程技术学院,四川,乐山,614007 刊名: 自动化仪表 英文刊名:PROCESS AUTOMATION INSTRUMENTATION 年,卷(期):2011,32(1) 参考文献(14条) 1.周立功ARM嵌入式系统基础教程 2005 2.项志遴.俞昌旋高温等离子体诊断技术 1982 3.渠海青;孙艳萍;朱正伟数字示波表中超高速数据采集系统的设计[期刊论文]-自动化仪表 2009(11) 4.李亚磊.邓新绿.俆军.丁万昱高信噪比Langmuir探针系统 2006(4) 5.曹军军;陈小勤;吴超基于USB2.0的数据采集卡的设计与实现[期刊论文]-仪器仪表用户 2006(01) 6.黄新财.佃松宜.汪道辉基于FPGA的高速连续数据采集系统的设计 2005(2) 7.张健;刘光斌多通道测试数据采集处理系统的设计与实现[期刊论文]-计算机测量与控制 2005(10) 8.张健.刘光斌多通道测试数据采集处理系统的设计与实现 2005(10) 9.黄新财;佃松宜;汪道辉基于FPGA的高速连续数据采集系统的设计[期刊论文]-微计算机信息 2005(02) 10.曹军军.陈小勤.吴超.何正友基于USB2.0的数据采集卡的设计与实现 2006(1) 11.李亚磊;邓新绿;徐军高信噪比Langmuir探针系统[期刊论文]-核聚变与等离子体物理 2006(04) 12.渠海青.孙艳萍.朱正伟数字示波表中超高速数据采集系统的设计 2009(11) 13.项志遴;俞昌旋高温等离子体诊断技术 1982 14.周立功ARM嵌入式系统基础教程 2005 本文链接:https://www.360docs.net/doc/cf18930472.html,/Periodical_zdhyb201101021.aspx 一、单选题 1、对于离散空间最佳的内插方法 是: A.整体内插法 B.局部内插法 C.移动拟合法 D.邻近元法 2、下列能进行地图数字化的设备 是: A.打印机 B.手扶跟踪数字化仪 C.主 机 D.硬盘 3、有关数据处理的叙述错误的 是: A.数据处理是实现空间数据有序化的必要过程 B.数据处理是检验数据质量的关键环节 C.数据处理是实现数据共享的关键步骤 D.数据处理是对地图数字化前的预处理 4、邻近元法 是: A.离散空间数据内插的方法 B.连续空间内插的方法 C.生成DEM的一种方法 D.生成DTM的一种方法 5、一般用于模拟大范围内变化的内插技术是: A.邻近元法 B.整体拟合技术 C.局部拟合技术 D.移动拟合法 6、在地理数据采集中,手工方式主要是用于录入: A.属性数据 B.地图数据 C.影象数 据 D.DTM数据 7、要保证GIS中数据的现势性必须实时进行: A.数据编辑 B.数据变换 C.数据更 新 D.数据匹配 8、下列属于地图投影变换方法的 是: A.正解变换 B.平移变换 C.空间变 换 D.旋转变换 9、以信息损失为代价换取空间数据容量的压缩方法是: A.压缩软件 B.消冗处理 C.特征点筛选 法 D.压缩编码技术 10、表达现实世界空间变化的三个基本要素是。 A. 空间位置、专题特征、时间 B. 空间位置、专题特征、属性 C. 空间特点、变化趋势、属性 D. 空间特点、变化趋势、时间 11、以下哪种不属于数据采集的方式: A. 手工方式 B.扫描方式 C.投影方 式 D.数据通讯方式 12、以下不属于地图投影变换方法的是: A. 正解变换 B.平移变换 C.数值变 换 D.反解变换 13、以下不属于按照空间数据元数据描述对象分类的是: A. 实体元数据 B.属性元数据 C.数据层元数据 D. 应用层元数据 14、以下按照空间数据元数据的作用分类的是: A. 实体元数据 B.属性元数据 C. 说明元数据 D. 分类元数据 15、以下不属于遥感数据误差的是: A. 数字化误差 B.数据预处理误差 C. 数据转换误差 D. 人工判读误差 关键词:声卡数据采集MATLAB 信号处理 论文摘要:利用数据采集卡构建的数据采集系统一般价格昂贵且难以与实际需求完全匹配。声卡作为数据采集卡具有价格低廉、开发容易和系统灵活等优点。本文详细介绍了系统的开发背景,软件结构和特点,系统地分析了数据采集硬件和软件设计技术,在此基础上以声卡为数据采集卡,以MATLAB为开发平台设计了数据采集与分析系统。 本文介绍了MATLAB及其数据采集工具箱, 利用声卡的A/ D、D/ A 技术和MATLAB 的方便编程及可视化功能,提出了一种基于声卡的数据采集与分析方案,该方案具有实现简单、性价比和灵活度高的优点。用MATLAB 语言编制了相应软件,实现了该系统。该软件有着简洁的人机交互工作界面,操作方便,并且可以根据用户的需求进行功能扩充。最后给出了应用该系统采集数据的应用实例。 1绪论 1.1 课题背景 数据也称观测值,是实验、测量、观察、调查等的结果,常以数量的形式给出。数据采集,又称数据获取,就是将系统需要管理的所有对象的原始数据收集、归类、整理、录入到系统当中去。数据采集是机管理系统使用前的一个数据初始化过程。数据采集技术广泛引用在各个领域。比如摄像头,麦克风,都是数据采集工具。 数据采集(Data Acquisition)是将被测对象(外部世界、现场)的各种参量(可以是物理量,也可以是化学量、生物量等)通过各种传感元件作 适当转换后,再经信号调理、采样、量化、编码、传输等步骤,最后送到控制器进行数据处理或存储记录的过程。 被采集数据是已被转换为电讯号的各种物理量,如温度、水位、风速、压力等,可以是模拟量,也可以是数字量。采集一般是采样方式,即隔一定时间(称采样周期)对同一点数据重复采集。采集的数据大多是瞬时值,也可是某段时间内的一个特征值。准确的数据测量是数据采集的基础。数据测量方法有接触式和非接触式,检测元件多种多样。不论哪种方法和元件,都以不影响被测对象状态和测量环境为前提,以保证数据的正确性。数据采集含义很广,包括对连续物理量的采集。在计算机辅助制图、测图、设计中,对图形或图像数字化过程也可称为数据采集,此时被采集的是几何量数据。 在智能仪器、信号处理以及自动控制等领域,都存在着数据的测量与控制问题,常常需要对外部的温度、压力、流量、位移等模拟量进行采集。数据采集技术是一种流行且实用的技术。它广泛应用于信号检测、信号处理、仪器仪表等领域。近年来,随着数字化技术的不断,数据采集技术也呈现出速度更高、通道更多、数据量更大的发展态势。 数据采集系统是一种应用极为广泛的模拟量测量设备,其基本任务是把信号送入计算机或相应的信号处理系统,根据不同的需要进行相应的计算和处理。它将模拟量采集、转换成数字量后,再经过计算机处理得出所需的数据。同时,还可以用计算机将得到的数据进行储存、显示和打印,以实现对某些物理量的监视,其中一部分数据还将被用作生产过程中的反馈控制量。 藿乐威尔田园的真正迷人之处,在我看是:它的遁隐之深,离开村子有两英里, 离开最近的邻居有半英里,并且有一大片地把它和公路隔开了;它傍着河流,据 它的主人说,由于这条河,而升起了雾,春天就不会下霜了。 梭罗在地球表面的任何地方都存在着垂直的和水平的两种关系:垂直关系把同一个地 方的不同要素联结起来,而水平关系则把不同地方的各种因素联结起来。这两种 关系的相对重要性随时代的变化而有所不同…正是这双重的关注,甚而至于这 两种关系的结合,才为地理学提供了独特性和完整性。 R.J.约翰斯顿 第三章空间数据模型 导读:本章描述的是整个GIS理论中最为核心的容。为了能够利用信息系统工具来 描述现实世界,并解决其中的问题,必须对现实世界进行建模。对于地理信息系统 而言,其结果就是空间数据模型。空间数据模型可以分为三种: 场模型:用于描述空间中连续分布的现象; 要素模型:用于描述各种空间地物; 网络模型:可以模拟现实世界中的各种网络; 在各种模型中,又介绍了相关的概念,如空间划分,空间关系,以及拓扑关系的形 式化描述——9交模型等。 最后讲述了普通的二维数据模型在空间上和时间上的扩展,时间数据模型和三维数 据模型。 值得注意的是,本章谈到的场模型和要素模型类同于后面提及的栅格数据和矢量数 据,但是前者是概念模型;后者是指其在信息系统中的实现。 1.空间数据模型的基本问题 人类生活和生产所在的现实世界是由事物或实体组成的,有着错综复杂的组成结构。从系统的角度来看,空间事物或实体的运动状态(在特定时空中的性状和态势)和运动方式(运动状态随时空变化而改变的式样和规律)不断发生变化,系统的诸多组成要素(实体)之间又存在着相互作用、相互制约的依存关系,表现为人口、物质、能量、信息、价值的流动和作用,反映出不同的空间现象和问题。为了控制和调节空间系统的物质流、能量流和人流等,使之转移到期望的状态和方式,实现动态平衡和持续发展,人们开始考虑对其中诸组成要素的空间状态、相互依存关系、变化过程、相互作用规律、反馈原理、调制机理等进行数字模拟和动态分析,这在客观上为地理信息系统提供了良好的应用环境和重要发展动力。 1.1概念 地理数据也可以称为空间数据(Spatial Data)。地理空间是指物质、能量、信息的存在形式在形态、结构过程、功能关系上的分布方式和格局及其在时间上的延续。地理信息系统中的地理空间分为绝对空间和相对空间两种形式。绝对空间是具有属性描述的空间位置的集合,它由一系列不同位置的空间坐标值组成;相对空间是具有空间属性特征的实体的集合, 目录 摘要 第1章引言 (3) 第2章研华ADAM模块简介 (4) 第2.1节 ADAM4017模拟量输入模块 (4) 第2.2节 ADAM-4520 隔离转换器 (4) 2.2.1 RS-232接口和RS-485接口 (5) 第3章监控组态软件概述 (7) 第3.1节组态与监控组态软件 (7) 第3.2节组态王6.5的介绍 (7) 3.2.1 组态王6.5的程序组成 (8) 3.2.2 组态王6.5变量和命令语言 (10) 第4章数据采集系统的总体结构 (12) 第4.1节数据采集系统的硬件结构 (12) 第4.2节数据采集系统的监控界面设计 (13) 4.2.1 通讯组态 (13) 4.2.2 画面组态 (19) 第5章结论 (24) 参考文献 (26) 致谢 (27) 摘要 文章介绍了以数据采集模块,通讯模块和监控组态软件为基础的多通道模拟量数据采集系统。系统采用研华ADAM40178通道A/D模块进行现场数据的采集,通过研华ADAM4520模块传输到计算机,利用组态王软件对数据进行分析处理,并实时显示数据。 本系统数据库技术、计算机图形接口技术于一体, 实现了系统的动态显示、报警、数据记录, 并提供友好的人机界面, 可靠性高、可维护性强。 关键词:数据采集系统;ADAM4017;ADAM4520;组态王软件 Abstract This article introduced a data acquisition system based on data acquisition module,communication module and monitoring and control configuration software.It use YanHua ADAM4017 PLC to make acquisition of those field data.Then we use YanHua ADAM4520 module to transmite to the computer making data processing and analysis with Kingview softwre and at the same time ,displaying the data. This system includes control technology,database technology and computer graphics interface technology,it achieves dynamic display and warning,data records. In addition,our system provides friendly man-machine interface with advantages such as high reliability and good maintainability. Keywords:data acquisition system,ADAM4017,ADAM4520,Kingview softwre 基于S T M及的通道同步数据采集系统设计 文件管理序列号:[K8UY-K9IO69-O6M243-OL889-F88688] 基于STM32及AD7606的16通道同步数据采集系统设计 摘要: 介绍了基于STM32及AD7606的同步数据采集系统的软硬件设计。主控芯片采用基于ARMCortex-M4内核的STM32F407IGT6,实现对AD采集数据的实时计算并通过以太网络进行数据传输。A7606为16位、8通道同步采样模数数据采集系统[],利用两片AD7606,可以实现对16路通道的实时同步采样。经过测试,该系统可以实现较高精度的实时数据采集。 0引言 [此处找书介绍STM32],该芯片主频可达168MHz,具有丰富的片内外设,并且与前代相比增加了浮点运算单元(FloatingPointUnit,FPU),使其可以满足数据采集系统中的 [介绍AD7606] 1系统总体方案设计 整个系统由传感器模块、信号调理模块、数据采集模块、处理器STM32、及通信模块及上位机系统组成。系统整体结构框图如图1所示。本系统是为液态金属电池性能测试设计,需要测量电池的充放电电压、电流以及交流加热系统的电压、电流,并以此计算出整个液态金属电池储能系统的效率。因此两片AD7606的16个通道分为两组,每组8个通道,这两组分别测量4路直流、交流的电压和电流信号。AD7606通过并行接口与STM32连接,STM32读取AD采样数据后进行计算,并将数据通过网络芯片DP83848通过UDP协议发送给上位机。上位机负责显示各通道采集信息、绘制波形以及保存数据等。 图1系统整体结构框图 2系统硬件设计 2.1模拟信号采集电路设计 Yibin University 基于TMS320F2812同步数据采集系统的设计 专业:电子信息科学与技术 学生姓名:王蓟 学生学号: 120302007 院系:物理与电子工程学院 年级、班: 2012级励志班 指导教师:文良华 2015年6月20日 摘要 为了实现高速同步数据采集,本文介绍了一种基于TMS320F2812 DSP芯片与AD转换芯片ADS8365构成的高速、并行高精度数据采集系统,主要内容包括两种芯片功能的介绍、硬件接口电路的设计及相关软件设计等。 关键词:TMS320F2812;ADS8365;数据采集;同步采样 Abstract To implement high-speed simultaneous data collection,this paper designed a hig h-speed,high-precision simultaneous data acquisition system,which is built based on two main modules:TMS320F2812 DSP chip of TI and AD converter of ADS8365.The d esign of hardware interface circuits and related software,the introduce of these two c hips etc. are described in this paper. Key words:TMS320F2812;ADS8365;data acquisition;simultaneous sample 基于STM32及AD7606的16通道同步数据采集系统设计 摘要: 介绍了基于STM32及AD7606的同步数据采集系统的软硬件设计。主控芯片采用基于ARM Cortex-M4内核的STM32F407IGT6,实现对AD 采集数据的实时计算并通过以太网络进行数据传输。A7606为16位、8通道同步采样模数数据采集系统[],利用两片AD7606,可以实现对16路通道的实时同步采样。经过测试,该系统可以实现较高精度的实时数据采集。 0 引言 [此处找书介绍STM32],该芯片主频可达168MHz,具有丰富的片内外设,并且与前代相比增加了浮点运算单元(Floating Point Unit,FPU),使其可以满足数据采集系统中的 [介绍AD7606] 1 系统总体方案设计 整个系统由传感器模块、信号调理模块、数据采集模块、处理器STM32、及通信模块及上位机系统组成。系统整体结构框图如图1所示。本系统是为液态金属电池性能测试设计,需要测量电池的充放电电压、电流以及交流加热系统的电压、电流,并以此计算出整个液态金属电池储能系统的效率。因此两片AD7606的16个通道分为两组,每组8个通道,这两组分别测量4路直流、交流的电压和电流信号。AD7606通过并行接口与STM32连接,STM32读取AD 采样数据后进行计算,并将数据通过网络芯片DP83848通过UDP 协议发送给上位机。上位机负责显示各通道采集信息、绘制波形以及保存数据等。 STM32F407IGT6 霍尔直流传感器 上位机软件DP83848 直流信号 交流信号 交流互感器 调理电路 调理电路 AD7606 AD7606 图1 系统整体结构框图 2 系统硬件设计 2.1 模拟信号采集电路设计 模拟信号的采集包含直流电压、电流,交流电压、电流四部分。直流信号的采集分别使用霍尔电压传感器HNV025A 和霍尔电流传感器HNC100B ,两种传感器的电路原理图类似,仅以霍尔电压传感器电路原理图为例说明,如图2-1所示。HNV025A 为电流型霍尔电压传感器,可以提高信号的抗干扰能力,其输入输出电流比为10mA/25mA 。因此在图中被测电压经过电阻R1转换为电流信号,传感器输出的电流信号经过R2变为电压信号。R3和C1组成一阶低通滤波器进行滤波。 第三章数据采集系统基本原理 第一节数据采集系统基本组成 ⒈传感器:将被测的物理量转换成电压信号送至仪器输入电路。 ⒉仪器输入电路:传感器与仪器之间的匹配电路,它作为传感器的输出负载必须具有足够高的输入阻抗,同时它的输出信号作为仪器的输入信号,要求它具有非常小的输出阻抗。仪器输入电路对共模干扰信号具有很强的抑制能力,即具有很高的共轭抑制比。 图3-1 数据采集系统的基本组成框图 ⒊低噪声前置放大器:对检测到的微弱电信号给以固定增益的放大,由于该放大器位于仪器一系列电路的前端,它的噪声是仪器整体系统噪声的主要提供者,因此任何电子仪器测量系统的前置放大器都必须是低噪声电路。 ⒋电模拟滤波器 ①低切滤波器:用来去除低频干扰信号,在地震勘探工作中低频干扰信号主要是指面波信号。 ②高切滤波器:它用来去除高频干扰,在数字信息采集系统中,一般都设置采样开关,这样高切滤波器主要用来去除信号中不满足采样定理的假频成分,假频信号的频率是信号中比折叠频率还高的高频成分。 ③陷波器:它用来除去50Hz的工业频率干扰。 ⒌多路采样开关:在一个采样周期之内,对全部各路信号按先后顺序分别采 样一次,将多路系统转换为单路系统,实现多路合一;同时将连续的模拟信号转换为离散的模拟子样脉冲。 ⒍模数转换器:则将每一个子样脉冲电压转换为二进制代码。 ⒎数据记录系统:将二进制代码按照国际专业技术组织的规定,进行编排和编码,编排主要是将一定长度的二进制数据编排成便于计算机数据处理的字节形式;编码则是为了数据写读的方便,针对数码“1”和“0”对磁带剩余磁通的变化方式所作出的规定。 第二节 输入电路和低噪声前置放大器 一、差动放大器输入电路 A 1和A 2的输出分别为V 1和V 2,它们可表示为 2111i W FO i W FO V R R V R R V ?-????? ??+= ,1221i W FO i W FO V R R V R R V ?-????? ? ?+= 放大器A 3具备输入平衡条件,它的输出V 0表示为 ()()2121021i i f F W FO f F V V R R R R V V R R V -?????? ? ?+-=-?- = 闭环增益为:f F W FO i i F R R R R V V V K ???? ? ?+-=-= 21210 由于该电路具有很高的输入阻抗和共模抑制比,许多数字地震仪的输入电路都采用了该形式的电路。 第三章空间数据采集与处理 着重看加粗题目 名词解释 1、数据压缩 2、空间数据的内插 3、空间数据处理 4、误差 5、空间数据 6、类型 7、对象 8、点 9、结点 10、线段11、线 12、弧 13、链 14、多边形 15、格网16、矢量17、栅格18、象元19、栅格对象20、数据精度 简答题 1、基于图像数据的矢量化方法从栅格数据向矢量数据转换的步骤有哪些? 2、从技术角度看,地理信息系统常用的数据采集方法包括哪些? 3、为什么在地理信息系统中使用元数据?元数据有哪些应用? 4、元数据的作用有哪些? 5、元数据的获取分为哪几个阶段?获取方法有哪些? 6、空间数据源的种类有哪些? 7、空间数据的一般性错误有哪些?主要有哪些检查方法? 8、空间数据质量标准要素及其内容如何? 第三章空间数据采集与处理 名词解释 1、所谓数据压缩,指从所取得的某个数据集合S中抽出一个子集A,这个子集作为一个新的信息源,在规定的精度范围内最好地逼近原集合,而又取得尽可能大的压缩比。 2、空间数据的内插可以作如下简单的描述:设已知一组空间数据,它们可以是离散点的形式,也可以是分区数据的形式,现在要从这些数据中找到一个函数关系式,使该关系式最好地逼近这些已知的空间数据,并能根据该函数关系式推求出区域范围内其他任意点或任意分区的值。这种通过已知点或分区的数据,推求任意点或分区数据的方法就称为空间数据的内插。 3、空间数据处理:对采集的各种数据,按照不同的方式方法对数据进行编辑运算,清除数据冗余,弥补数据缺失,形成符合用户要求的数据文件格式。 4、误差误差反映了数据与真实值或者大家公认的真值之间的差异,它是一种常用的数据准确性的表达方式。 5、空间数据:用于确定具有自然特征或者人工建筑特征的地理实体的地理位置、属性及其边界的信息。 6、类型:在元数据标准中,数据类型指该数据能接收的值的类型。 7、对象:对地理实体的部分或整体的数字表达。 8、点:用于位置确定的零维地理对象。 9、结点:拓扑连接两个或多个链或环的一维对象。 10、线段:两个点之间的直线段。 11、线:由相互连接的一系列线段组成的没有分支线段的序列,线可以自身或与其它线相切。 12、弧:由数学表达式确定的点集组成的弧状曲线。 13、链:两个结点之间的拓扑关联。 14、多边形:在二维平面中由封闭弧段包围的区域。 15、格网:组成一规则或近似规则的棋盘状镶嵌表面的格网集合,或者组成一规则或近似规则的棋盘状镶嵌表面的点集合。 16、矢量:有方向线的组合。 17、栅格:同一格网或数字影像的一个或多个叠加层。 18、象元:二维图形要素,它是数字影象最小要素。 19、栅格对象:一个或多个影象或格网,每一个影象或格网表示一个数据层,各层之间相应的格网单元或像元一致且相互套准。 20、数据精度:数据的准确度与精确度的总称。数据的准确度是指结果、计算值或估计值与真实值或者大家公认的真值的接近程度。数据的精密度指数据表示的精密程度,亦即数据表示的有效位数。 练习3 1.利用影像配准(Georeferncing) 工具进行影像数据的地理配准 2.编辑器的使用(点要素、线要素、多边形要素的数字化) 注意:在基于ArcMap 的操作过程中请注意保存地图文档 第1步地形图的配准-加载数据和影像配准工具 (1) 第2步输入控制点 (2) 第3步设定数据框的属性 (4) 第4步矫正并重采样栅格生成新的栅格文件 (6) 第5 步分层矢量化-在ArcCatlog中创建一个线要素图层 (7) 第6步从已配准的地图上提出等高线并保存到上面创建的要素类中 (13) 根据GPS观测点数据配准影像并矢量化的步骤 (14) 课外练习:翻译 (20) 本次练习,记成绩10分 第1步地形图的配准-加载数据和影像配准工具 数据:昆明市西山区普吉地形图1:10000 地形图――70011-1.tif 所有图件扫描后都必须经过扫描配准,对扫描后的栅格图进行检查,以确保矢量化工作顺利进行。 ●打开ArcMap,添加“影像配准”工具栏。 ●把需要进行配准的影像—70011-1.TIF增加到ArcMap中,会发现“影像配准”工具栏 中的工具被激活。 第2步输入控制点 在配准中我们需要知道一些特殊点的坐标。通过读图,我们可以得到一些控件点――公里网格的交点,我们可以从图中均匀的取几个点。一般在实际中,这些点应该能够均匀分布。 ●在”影像配准”工具栏上,点击“添加控制点”按钮。 ●使用该工具在扫描图上精确到找一个控制点点击,然后鼠标右击输入该点实际的坐标位 置,如下图所示: ●用相同的方法,在影像上增加多个控制点(大于7个),输入它们的实际坐标。点击“影 像配准”工具栏上的“查看链接表”按钮。 ●注意:在连接表对话框中点击“保存”按钮,可以将当前的控制点保存为磁盘上的文件, 以备使用。 第三章数据采集常用程序设计 数据采集和处理是计算机在生产过程中应用的基础,任何计算机检测及控制系统都离不开信息的采集、处理及存储。两种典型的系统: 生产过程控制系统——工况数据采集、数据处理、决策输出、驱动执行机构; 检测监控系统——工况数据采集、数据处理、显示或描绘成曲线; 我们已经介绍过数据采集的硬件结构,本章主要介绍数据采集中一些常用的程序设计。 第一节计算机数据采集系统 一、计算机数据采集系统的任务 在现代冶金、化工、石油、电力等工业生产过程中,往往需要对大量的过程参数进行监视和测量。计算机数据采集系统的任务,就是要对生产现场的过程参数定时进行检测、记录、存储、处理、打印报表、显示及超限报警。其结构如图3-1所示。 图3-1 计算机采集系统结构图 二、计算机数据采集系统的优点 计算机数据采集系统的优点:灵活、方便、速度快、判断能力强、图形功能强。如在化工生产中, (1)用不同的色彩,代表不同的管线中的流质; (2)在测量点上,显示温度和压力的设定值、测量值、误差值; (3)超限时用红灯闪烁表示,并发出报警声; (4)可以由历史数据,生成历史趋势图、各种报表。 ——注:虚拟仪器LabView和LabWindows中,有各种典型的按钮、开关、测量仪器, 可以刻度、曲线、表格、棒状图等多种显示数据。该开发平台是图形化编程,适合工程人员使用。 三、计算机数据采集常用程序 计算机数据采集中的常用程序,包括中断、定时器、采样、看门狗、判断、上下限报警、LED数码管显示、小型行列式键盘控制等。 以数字信号处理器TMS320C24X为例,介绍常用的中断、定时、采样、看门狗的程序设计知识;以单片机MCS-51系列为例,介绍判断程序设计。 第二节中断程序设计 一、中断分类 图3-2 中断分类图 从中断的来源看,分为硬件中断和软件中断;从中断是否可屏蔽来看,分为可屏蔽中断和不可屏蔽中断。 1、硬件中断和软件中断 硬件中断是由DSP的硬件所产生的中断,可由DSP的外部中断引脚(6个)产生,也可由DSP自身的外围设备产生(如定时器、A/D转换器、串行通信接口)。 软件中断是由DSP的指令产生的,如INTR、TRAP、RESET等。 2、可屏蔽中断和不可屏蔽中断 (1)可屏蔽中断:可以用软件来屏蔽或者使能的硬件和软件中断。 (2)不可屏蔽中断:中断不能够被屏蔽,DSP总是响应的中断。 第三章厂站监控信息的采集 第一节遥测信息的采集 (讲稿) 第二节遥信信息的采集 变电站中的状态量信息主要包括传统概念的遥信信息和自动化系统设备运行状态信息等。在变电站综合自动化系统中,不仅要采集表征电网当前拓扑的开关位置等遥信信息,还要将反映测量、保护、监控等系统工作状态的信息进行采集、监视。 一、遥信信息及其来源 遥信信息用来传送断路器、隔离开关的位置状态,传送继电保护、自动装置的动作状态,以及系统、设备等运行状态信号,如厂站端事故总信号,发电机组开、停状态信号以及远动终端、通道设备的运行和故障等信号。这些位置状态、动作状态和运行状态都只取两种状态值。如开关位置只取“合”或“分”,设备状态只取“运行”或“停止”。因此,可用一位二进制数即码字中的一个码元就可以传送一个遥信对象的状态。 1.断路器状态信息的采集 断路器的合闸、分闸位置状态决定着电力线路的接通和断开,断路器状态是电网调度自动化的重要遥信信息。断路器的位置信号通过其辅助触点QF引出,QF触点是在断路器的操动机构中与断路器的传动轴联动的,所以,QF触点位置与断路器位置一一对应。 2.继电保护动作状态的采集 采集继电保护动作的状态信息,就是采集继电器的触点状态信息,并记录动作时间,对调度员处理故障及事后的事故分析有很重要的意义。 3.事故总信号的采集 发电厂或变电站任一断路器发生事故跳闸,就将启动事故总信号。事故总信号用以区别正常操作与事故跳闸,对调度员监视系统运行十分重要。事故总信号的采集同样是触点位置的采集。 4.其它信号的采集 当变电站采用无人值班方式运行后,还要增加包括大门开关状态等多种遥信信息,可参阅本章第一节。 第3章空间数据模型 为了能够利用地理信息系统工具解决现实世界中的问题,首先必需将复杂的地理事物和现象简化和抽象到计算机中进行表示、处理和分析。本章从空间认知的角度讲述了对现实世界进行抽象建模的过程,其结果就是空间数据模型;空间数据模型可以归纳为空间概念模型、逻辑数据模型和物理数据模型三个层次。空间概念数据模型包括:场模型:用于描述空间中连续分布的现象;对象模型:用于描述各种空间地物;网络模型:可以模拟现实世界中的各种网络。常用的空间逻辑数据模型有矢量数据模型、栅格数据模型和面向对象模型等。在讲述空间数据模型的同时,又介绍了空间实体和空间关系等相关概念。 3.1地理空间与空间抽象 3.1.1地理空间与空间实体 在地理学上,地理空间(Geographic Space)是指地球表面及近地表空间,是地球上大气圈、水圈、生物圈、岩石圈和土壤圈交互作用的区域,地球上最复杂的物理过程、化学过程、生物过程和生物地球化学过程就发生在该区域。在地理空间中存在着复杂的空间事物或地理现象,它们可能是物质的,也可能是非物质的,如山脉、水系、土地类型、城市分布、资源分布、道路网系、环境变迁等。地理空间中的这些空间事物或地理现象就代表了现实世界;而地理信息系统即是人们通过对各种各样的地理现象的观察抽象、综合取舍,编码和简化,以数据形式存入计算机内进行操作处理,从而达到对现实世界规律进行再认识和分析决策的目的。地理空间实体就是对复杂地理事物和现象进行简化抽象得到的结果,简称空间实体,它们的一个典型特征是与一定的地理空间位置有关,都具有一定的几何形态,分布状况以及彼此之间的相互关系。空间实体具有4个基本特征:空间位置特征、属性特征、时间特征和空间关系。 1.空间位置特征 表示空间实体在一定的坐标系中的空间位置或几何定位,通常采用地理坐标的经纬度、空间直角坐标、平面直角坐标和极坐标等来表示。空间位置特征也称为几何特征,包括空间实体的位置、大小、形状和分布状况等。 2.属性特征 属性特征也称为非空间特征或专题特征,是与空间实体相联系的、表征空间实体本身性质的数据或数量,如实体的类型语义定义、量值等。属性通常分为定性和定量两种,定性属性包括名称、类型、特性等;定量属性包括数量、等级等。 3.时间特征 时间特征是指空间实体随着时间变化而变化的特性。空间实体的空间位置和属性相对于时间来说,可能会存在空间位置和属性同时变化的情况,如旧城区改造中,房屋密集区拆迁新建商业中心;也存在空间位置和属性独立变化的情况,即实体的空间位置不变,但属性发生变化,如土地使用权转让,或者属性不变而空间位置发生变化,如河流的改道。 4.空间关系特征 在地理空间中,空间实体一般都不是独立存在的,而是相互之间存在着密切的联系。这种相互联系的特性就是空间关系。空间关系包括拓扑关系(topological spatial relation)、顺双通道同步数据采集系统的设计与实现
第三章 空间数据采集与处理练习..
关于数据采集技术的内容
GIS空间数据模型
数据采集系统
基于STM及的通道同步数据采集系统设计
同步数据采集系统的设计
基于STM32及AD7606的16通道同步数据采集系统设计
第三章数据采集系统基本原理
第三章 空间数据采集与处理练习
第三章空间数据的采集与地理配准课案
第三章 数据采集常用程序设计
3第三章 厂站监控信息的采集
GIS课件第3章 空间数据模型