最小二乘改进算法及其在椭圆拟合中的应用
最小二乘一次完成算法(程序)
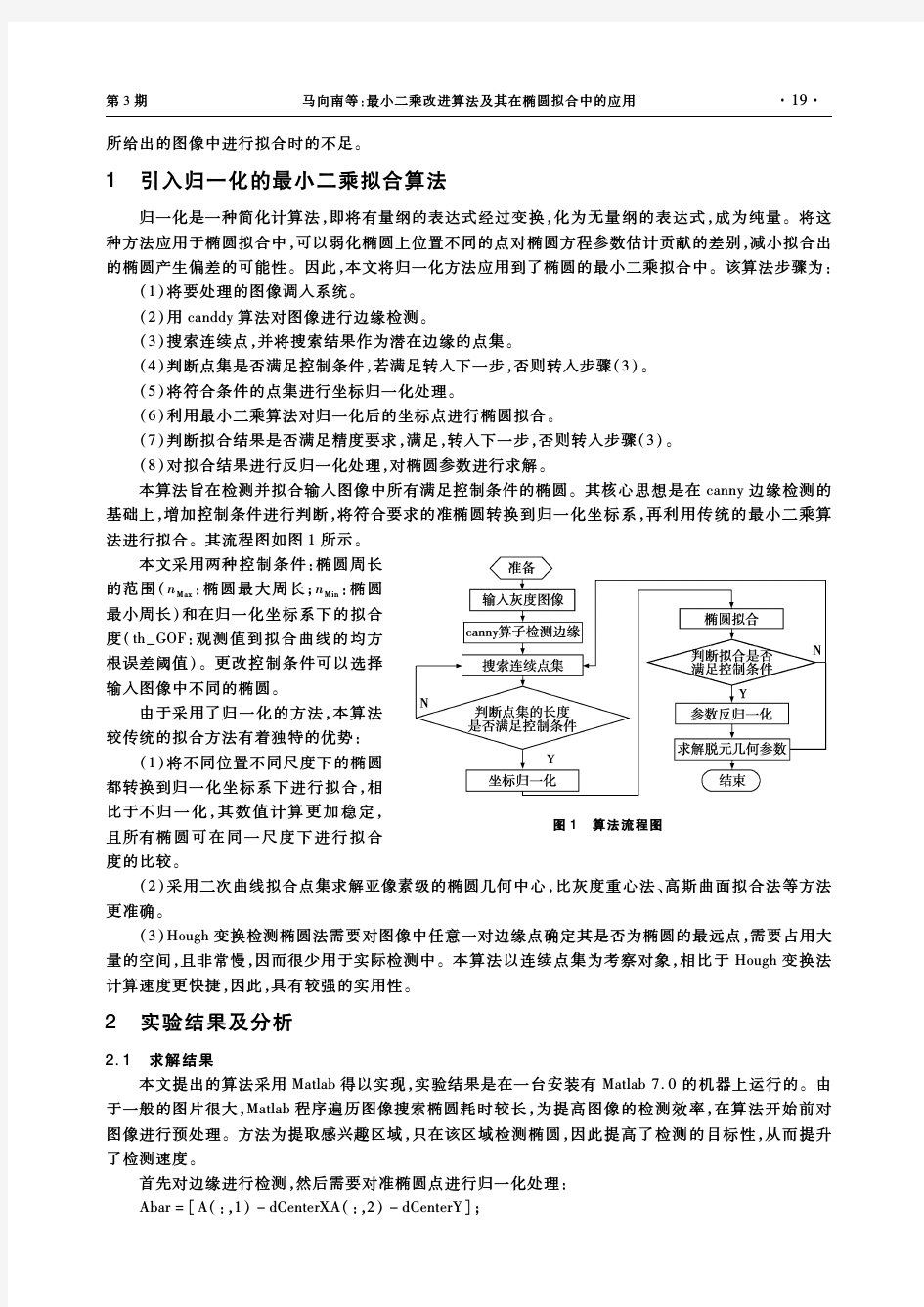
《系统辨识与建模》(MATLAB编程) 信研0701 孙娅萍2007000694 编程第四次作业 仿真模型参数为:a=[-1.5 0.7];b=[1.0 0.5],由下式递推产生502组数据,并形成如下矩阵: z(k)=1.5z(k–1)-0.7z(k–2)+1.0u(k–1)+0.5u(k–2)+v(k) 试用一次完成最小二乘法辨识系统模型。 程序部分: %************************************************************% % ***** 二阶系统的最小二乘一次完成算法辨识程序*****% % 系统辨识的输入信号u是6阶的M序列,长度是500; L = 500; u = load('u.txt'); u2 = load('u2.txt'); u1 = load('u1.txt'); z = zeros(1,L+1); for k = 3 : (L+1) % 理想输出作为系统观测值 z(k) = 1.5 * z(k-1) - 0.7 * z(k-2) + u(k-1) + 0.5 * u(k-2); end % 绘制输入信号和输出观测值的图形 figure(1) i = 1 : 1 : L; subplot(2,1,1) plot(i,u) k = 1 : 1 : (L+1); subplot(2,1,2) plot(k,z) z = z' z1 = load('z1.txt'); z2 = load('z2.txt'); z3 = load('z3.txt'); Na = 2; Nb = 2; % 定义Na、Nb; for i = 1 : (Na+Nb) if ((i == 1)) H = -1 * z2; end if (i == 2) H = -1 * z1; end if (i == (Na+1)) H = u2; end
最小二乘法曲线拟合 原理及matlab实现
曲线拟合(curve-fitting ):工程实践中,用测量到的一些离散的数据},...2,1,0),,{(m i y x i i =求一个近似的函数)(x ?来拟合这组数据,要求所得的拟合曲线能最好的反映数据的基本趋势(即使)(x ?最好地逼近()x f ,而不必满足插值原则。因此没必要取)(i x ?=i y ,只要使i i i y x -=)(?δ尽可能地小)。 原理: 给定数据点},...2,1,0),,{(m i y x i i =。求近似曲线)(x ?。并且使得近似曲线与()x f 的偏差最小。近似曲线在该点处的偏差i i i y x -=)(?δ,i=1,2,...,m 。 常见的曲线拟合方法: 1.使偏差绝对值之和最小 2.使偏差绝对值最大的最小 3.使偏差平方和最小 最小二乘法: 按偏差平方和最小的原则选取拟合曲线,并且采取二项式方程为拟合曲线的方法,称为最小二乘法。 推导过程: 1. 设拟合多项式为: 2. 各点到这条曲线的距离之和,即偏差平方和如下: 3. 问题转化为求待定系数0a ...k a 对等式右边求i a 偏导数,因而我们得到 了: ....... 4、 把这些等式化简并表示成矩阵的形式,就可以得到下面的矩阵: 5. 将这个范德蒙得矩阵化简后可得到:
6. 也就是说X*A=Y,那么A = (X'*X)-1*X'*Y,便得到了系数矩阵A,同时,我们也就得到了拟合曲线。 MATLAB实现: MATLAB提供了polyfit()函数命令进行最小二乘曲线拟合。 调用格式:p=polyfit(x,y,n) [p,s]= polyfit(x,y,n) [p,s,mu]=polyfit(x,y,n) x,y为数据点,n为多项式阶数,返回p为幂次从高到低的多项式系数向量p。x必须是单调的。矩阵s包括R(对x进行QR分解的三角元素)、df(自由度)、normr(残差)用于生成预测值的误差估计。 [p,s,mu]=polyfit(x,y,n)在拟合过程中,首先对x进行数据标准化处理,以在拟合中消除量纲等影响,mu包含标准化处理过程中使用的x的均值和标准差。 polyval( )为多项式曲线求值函数,调用格式: y=polyval(p,x) [y,DELTA]=polyval(p,x,s) y=polyval(p,x)为返回对应自变量x在给定系数P的多项式的值。 [y,DELTA]=polyval(p,x,s) 使用polyfit函数的选项输出s得出误差估计Y DELTA。它假设polyfit函数数据输入的误差是独立正态的,并且方差为常数。则Y DELTA将至少包含50%的预测值。 如下给定数据的拟合曲线: x=[0.5,1.0,1.5,2.0,2.5,3.0], y=[1.75,2.45,3.81,4.80,7.00,8.60]。 解:MATLAB程序如下: x=[0.5,1.0,1.5,2.0,2.5,3.0]; y=[1.75,2.45,3.81,4.80,7.00,8.60]; p=polyfit(x,y,2) x1=0.5:0.05:3.0; y1=polyval(p,x1); plot(x,y,'*r',x1,y1,'-b') 运行结果如图1 计算结果为: p =0.5614 0.8287 1.1560 即所得多项式为y=0.5614x^2+0.08287x+1.15560 图1 最小二乘法曲线拟合示例 对比检验拟合的有效性: 例:在[0,π]区间上对正弦函数进行拟合,然后在[0,2π]区间画出图形,比较拟合区间和非拟合区间的图形,考察拟合的有效性。 在MATLAB中输入如下代码: clear x=0:0.1:pi; y=sin(x); [p,mu]=polyfit(x,y,9)
最小二乘法的基本原理和多项式拟合
最小二乘法的基本原理和多项式拟合 一 最小二乘法的基本原理 从整体上考虑近似函数)(x p 同所给数据点),(i i y x (i=0,1,…,m)误差 i i i y x p r -=)((i=0,1,…,m) 的大小,常用的方法有以下三种:一是误差 i i i y x p r -=)((i=0,1,…,m)绝对值的最大值i m i r ≤≤0max ,即误差 向量 T m r r r r ),,(10 =的∞—范数;二是误差绝对值的和∑=m i i r 0 ,即误差向量r 的1— 范数;三是误差平方和∑=m i i r 02 的算术平方根,即误差向量r 的2—范数;前两种方法简单、自然,但不便于微分运算 ,后一种方法相当于考虑 2—范数的平方,因此在曲线拟合中常采用误差平方和∑=m i i r 02 来 度量误差i r (i=0,1,…,m)的整 体大小。 数据拟合的具体作法是:对给定数据 ),(i i y x (i=0,1,…,m),在取定的函数类Φ中,求Φ∈)(x p ,使误差i i i y x p r -=)((i=0,1,…,m)的平方和最小,即 ∑=m i i r 2 = 从几何意义上讲,就是寻求与给定点),(i i y x (i=0,1,…,m)的距离平方和为最 小的曲线 )(x p y =(图6-1)。函数)(x p 称为拟合函数或最小二乘解,求拟合函数)(x p 的方法称为曲线拟合的最小二乘法。 在曲线拟合中,函数类Φ可有不同的选取方法 . 6—1 二 多项式拟合 假设给定数据点),(i i y x (i=0,1,…,m),Φ为所有次数不超过)(m n n ≤的多项式构成的函数类,现求一 Φ ∈=∑=n k k k n x a x p 0 )(,使得 [] min )(0 02 02 =??? ??-=-=∑∑∑===m i m i n k i k i k i i n y x a y x p I (1) [ ] ∑ = = - m i i i y x p 0 2 min ) (
几种最小二乘法递推算法的小结
一、 递推最小二乘法 递推最小二乘法的一般步骤: 1. 根据输入输出序列列出最小二乘法估计的观测矩阵?: ] )(u ... )1( )( ... )1([)(T b q n k k u n k y k y k ------=? 没有给出输出序列的还要先算出输出序列。 本例中, 2)]-u(k 1),-u(k 2),-1),-y(k -[-y(k )(T =k ?。 2. 给辨识参数θ和协方差阵P 赋初值。一般取0θ=0或者极小的数,取σσ,20I P =特别大,本例中取σ=100。 3. 按照下式计算增益矩阵G : ) ()1()(1)()1()(k k P k k k P k G T ???-+-= 4. 按照下式计算要辨识的参数θ: )]1(?)()()[()1(?)(?--+-=k k k y k G k k T θ?θθ 5. 按照下式计算新的协方差阵P : )1()()()1()(---=k P k k G k P k P T ? 6. 计算辨识参数的相对变化量,看是否满足停机准则。如满足,则不再递推;如不满足, 则从第三步开始进行下一次地推,直至满足要求为止。 停机准则:ε???<--) (?)1(?)(?max k k k i i i i 本例中由于递推次数只有三十次,故不需要停机准则。 7. 分离参数:将a 1….a na b 1….b nb 从辨识参数θ中分离出来。 8. 画出被辨识参数θ的各次递推估计值图形。 为了说明噪声对递推最小二乘法结果的影响,程序5-7-2在计算模拟观测值时不加噪 声, 辨识结果为a1 =1.6417,a2 = 0.7148,b1 = 0.3900,b2 =0.3499,与真实值a1 =1.642, a2 = 0.715, b1 = 0.3900,b2 =0.35相差无几。 程序5-7-2-1在计算模拟观测值时加入了均值为0,方差为0.1的白噪声序列,由于噪 声的影响,此时的结果为变值,但变化范围较小,现任取一组结果作为辨识结果。辨识结果为a1 =1.5371, a2 = 0.6874, b1 = 0.3756,b2 =0.3378。 程序5-7-2-2在计算模拟观测值时加入了有色噪声,有色噪声为 E(k)+1.642E(k-1)+0.715E(k-2),E(k)是均值为0,方差为0.1的白噪声序列,由于有色噪声的影响,此时的辨识结果变动范围远比白噪声时大,任取一组结果作为辨识结果。辨识结果为a1 =1.6676, a2 = 0.7479, b1 = 0.4254,b2 =0.3965。 可以看出,基本的最小二乘法不适用于有色噪声的场合。
系统辨识最小二乘参数估计matlab
最小二乘参数估计 摘要: 最小二乘的一次性完成辨识算法(也称批处理算法),他的特点是直接利用已经获得的所有(一批)观测数据进行运算处理。这种算法在使用时,占用内存大,离线辨识,观测被辨识对象获得的新数据往往是逐次补充到观测数据集合中去的。在应用一次完成算法时,如果要求在每次新增观测数据后,接着就估计出系统模型的参数,则需要每次新增数据后要重新求解矩阵方程()Z l T l l T l ΦΦΦ-∧=1θ。 最小二乘辩识方法在系统辩识领域中先应用上已相当普及,方法上相当完善,可以有效的用于系统的状态估计,参数估计以及自适应控制及其他方面。 关键词: 最小二乘(Least-squares ),系统辨识(System Identification ) 目录: 1.目的 (1) 2.设备 (1) 3引言 (1) 3.1 课题背景 (1) 4数学模型的结构辨识 (2) 5 程序 (3) 5.1 M 序列子函数 ................................................................................. 错误!未定义书签。 5.2主程序............................................................................................... 错误!未定义书签。 6实验结果: ................................................................................................................................... 3 7参考文献: ................................................................................................. 错误!未定义书签。 1.目的 1.1掌握系统辨识的理论、方法及应用 1.2熟练Matlab 下最小二乘法编程 1.3掌握M 序列产生方法 2.设备 PC 机1台(含Matlab 软件) 3引言 3.1 课题背景 最小二乘理论是有高斯(K.F.Gauss )在1795年提出:“未知量的最大可能值是这样一个数值,它使各次实际观测值和计算值之间的差值的平方乘以度量其精度的数值以后的和最小。”这就是最小二乘法的最早思想。 最小二乘辨识方法提供一个估算方法,使之能得到一个在最小方差意义上与实验数据最
最小二乘法的多项式拟合
用最小二乘法进行多项式拟合(m a t l a b 实现) 西安交通大学 徐彬华 算法分析: ,1,2,3,..,m),一共m+1 个数据点,取多项式P(x),使 函数P(x)称为拟合函数或最小二乘解,令似的 使得 其中,a0,a1,a2,…,an 为待求未知数,n 为多项式的最高次幂,由此,该问题化为求 的极值问题。由多元函数求极值的必要条件: j=0,1,…,n 得到: 总共有7个数据点,令m=6 第一步:画出已知数据的的散点图,确定拟合参数n; x=::;y=[,,,,,,]; plot(x,y,'*') xlabel 'x 轴' ylabel 'y 轴' title '散点图' hold on
因此将拟合参数n设为3. 第二步:计算矩阵 A= 注意到该矩阵为(n+1)*(n+1)矩阵, 多项式的幂跟行、列坐标(i,j)的关系为i+j-2,由此可建立循环来求矩阵的各个元素,程序如下: m=6;n=3; A=zeros(n+1); for j=1:n+1 for i=1:n+1 for k=1:m+1 A(j,i)=A(j,i)+x(k)^(j+i-2) end end end; 再来求矩阵 B= B=[0 0 0 0]; for j=1:n+1 for i=1:m+1 B(j)=B(j)+y(i)*x(i)^(j-1) end end 第三步:写出正规方程,求出a0,,a1…,an.
B=B'; a=inv(A)*B; 第四步:画出拟合曲线 x=[::]; z=a(1)+a(2)*x+a(3)*x.^2+a(4)*x.^3; plot(x,z) legend('离散点','y=a(1)+a(2)*x+a(3)*x.^2+a(4)*x.^3') title('拟合图') 总程序附下: x=::;y=[,,,,,,]; plot(x,y,'*') xlabel 'x轴' ylabel 'y轴' title '散点图' hold on m=6;n=3; A=zeros(n+1); for j=1:n+1 for i=1:n+1 for k=1:m+1 A(j,i)=A(j,i)+x(k)^(j+i-2) end end end; B=[0 0 0 0]; for j=1:n+1 for i=1:m+1 B(j)=B(j)+y(i)*x(i)^(j-1) end end B=B'; a=inv(A)*B; x=[::]; z=a(1)+a(2)*x+a(3)*x.^2+a(4)*x.^3; plot(x,z) legend('离散点','y=a(1)+a(2)*x+a(3)*x.^2+a(4)*x.^3') title('拟合图')
最小二乘法圆拟合
最小二乘法圆拟合 1.最小二乘法圆拟合原理 理论 最小二乘法(Least Square Method )是一种数学优化技术。它通过最小化误差的平方和找到一组数据的最佳函数匹配。利用最小二乘法可以简便地求得未知的数据,并使得这些求得的数据与实际数据之间误差的平方和为最小。 最小二乘圆拟合模型公式推导 在二维平面坐标系中,圆方程一般可表示为: ()22020)(r y y x x =-+- (1) 对于最小二乘法的圆拟合,其误差平方的优化目标函数为: [] 2 12020)()(∑=--+-=n i i i r y y x x S 式中:()i i y x ,n i ,...,2,1=为圆弧上特征点坐标;n 为参与拟合的特征点数。 在保持这优化目标函数特征的前提上,我们需要对其用一种稍微不同的改进方法来定义误差平方,且其避免了平方根,同时可得到一个最小化问题的直接解,定义如下: [] 2 122020)()(∑=--+-=n i i i r y y x x E (2) 则(2)式可改写为: ( )2 12 20 0220 02 22∑=-+-++-=n i i i i i r y y y y x x x x E (3) 令,02y B -=,02x A -=22020r y x C -+= 即(3)式可表示为:
() 2 22∑=++++=n i i i i i C By Ax y x E 由最小二乘法原理,参数A ,B ,C 应使E 取得极小值。根据极小值的求法,A ,B 和C 应满足 () 020 22=++++=??∑=i n i i i i i x C By Ax y x A E (4) () 020 22=++++=??∑=i n i i i i i y C By Ax y x B E (5) () 020 22=++++=??∑=n i i i i i C By Ax y x C E (6) 求解方程组,先消去参数C ,则 式()()∑=*-*n i i x n 064得 ( )0 02 202 030000002=+-++?? ? ??-+??? ??-∑∑∑∑∑∑∑∑∑∑==========n i i n i i i n i i i n i i n i n i i i n i i i n i n i i i n i i x y x y x n x n B y x y x n A x x x n (7) 式()()∑=*-*n i i y n 065得 ( )0 02 202 030002000=+-++?? ? ??-+??? ??-∑∑∑∑∑∑∑∑∑∑==========n i i n i i i n i i i n i i n i n i i i n i i n i n i i i n i i i y y x y x n y n B y y y n A y x y x n (8) 令 ??? ??-=∑∑∑===n i n i n i i i i x x x n M 000211(9) ?? ? ??-==∑∑∑===n i n i i i n i i i y x y x n M M 0002112(10) ?? ? ??-=∑∑∑===n i n i i i n i i y y y n M 000222(11)
Matlab最小二乘法曲线拟合的应用实例
MATLAB机械工程 最小二乘法曲线拟合的应用实例 班级: 姓名: 学号: 指导教师:
一,实验目的 通过Matlab上机编程,掌握利用Matlab软件进行数据拟合分析及数据可视化方法 二,实验内容 1.有一组风机叶片的耐磨实验数据,如下表所示,其中X为使用时间,单位为小时h,Y为磨失质量,单位为克g。要求: 对该数据进行合理的最小二乘法数据拟合得下列数据。 x=[10000 11000 12000 13000 14000 15000 16000 17000 18000 19000 2 0000 21000 22000 23000]; y=[24.0 26.5 29.8 32.4 34.7 37.7 41.1 42.8 44.6 47.3 65.8 87.5 137.8 174. 2] 三,程序如下 X=10000:1000:23000; Y=[24.0,26.5,29.8,32.4,34.7,37.7,41.1,42.8,44.6,47.3,65.8,87.5,137.8,17 4.2] dy=1.5; %拟合数据y的步长for n=1:6 [a,S]=polyfit(x,y,n); A{n}=a;
da=dy*sqrt(diag(inv(S.R′*S.R))); Da{n}=da′; freedom(n)=S.df; [ye,delta]=polyval(a,x,S); YE{n}=ye; D{n}=delta; chi2(n)=sum((y-ye).^2)/dy/dy; end Q=1-chi2cdf(chi2,freedom); %判断拟合良好度 clf,shg subplot(1,2,1),plot(1:6,abs(chi2-freedom),‘b’) xlabel(‘阶次’),title(‘chi2与自由度’) subplot(1,2,2),plot(1:6,Q,‘r’,1:6,ones(1,6)*0.5) xlabel(‘阶次’),title(‘Q与0.5线’) nod=input(‘根据图形选择适当的阶次(请输入数值)’); elf,shg, plot(x,y,‘kx’);xlabel(‘x’),ylabel(‘y’); axis([8000,23000,20.0,174.2]);hold on errorbar(x,YE{nod},D{nod},‘r’);hold off title(‘较适当阶次的拟合’) text(10000,150.0,[‘chi2=’num2str(chi2(nod))‘~’int2str(freedom(nod))])
基于最小二乘法的系统参数辨识
基于最小二乘法的系统参数辨识 吴令红,熊晓燕,张涛 太原理工大学机械电子研究所,太原 (030024) E-mail lhwu0818@https://www.360docs.net/doc/cf6102618.html, 摘要:系统辨识是自动控制学科的一个重要分支,由于其特殊作用,已经广泛应用于各种领域,尤其是复杂系统或参数不容易确定的系统的建模。过去,系统辨识主要用于线性系统的建模,经过多年的研究,已经形成成熟的理论。但随着社会、科学的发展,非线性系统越来越受到人们的关注,其控制与模型之间的矛盾越来越明显,因而非线性系统的辨识问题也越来越受到重视,其辨识理论不断发展和完善本。文重点介绍了系统参数辨识中最小二乘法的基本原理,并通过悬臂梁模型的辨识实例,具体说明了基于最小二乘法参数辨识在Matlab 中的实现方法。结果表明基于最小二乘法具有算法简单、精度较高等优点。 关键词:系统辨识;参数辨识;滑动平均模型(ARX);最小二乘法;Matlab 中图分类号:TH-9 1. 引言 所谓辨识就是通过测取研究对象在人为输入作用下的输出响应,或正常运行时的输入输出数据记录,加以必要的数据处理和数学计算,估计出对象的数学模型。这是因为对象的动态特性被认为必然表现在它的变化着的输入输出数据之中,辨识只不过是利用数学的方法从数据序列中提炼出对象的数学模型而已[1]。 最小二乘法是系统参数辨识中最基本最常用的方法。最小二乘法因其算法简单、理论成熟和通用性强而广泛应用于系统参数辨识中。本文基于悬臂梁的实测数据,介绍了最小二乘法的参数辨识在Matlab中的实现。 2. 系统辨识 一般而言,建立系统的数学模型有两种方法:激励分析法和系统辨识法。前者是按照系统所遵循的物化(或社会、经济等)规律分析推导出模型。后者则是从实际系统运行和实验数据处理获得模型。如图1所示,系统辨识就是从系统的输入输出数据测算系统数学模型的理论和方法。更进一步的定义是L.A.Zadeh曾经与1962年给出的,即“系统辨识是在输入和输出的基础上,从系统的一类系统范围内,确立一个与所实验系统等价的系统”。另外,系统辨识还应该具有3个基本要素,即模型类、数据和准则[5]。被辨识系统模型根据模型形式可分为参数模型和非参数模型两大类。所谓参数模型是指微分方程、差分方程、状态方程等形式的数学模型;而非参数模型是指频率响应、脉冲响应、传递函数等隐含参数的数学模型。在辨识工程中,模型的确定主要根据经验对实际对象的特性进行一定程度上的假设,如对象的模型是线性的还是非线性的、是参数模型还是非参数模型等。在模型确定之后,就可以根据对象的输入输出数据,按照一定的辨识算法确定模型的参数[4]。 y 图1 被研究的动态系统
曲线拟合的最小二乘法讲解
实验三 函数逼近与曲线拟合 一、问题的提出: 函数逼近是指“对函数类A 中给定的函数)(x f ,记作A x f ∈)(,要求在另一类简的便于计算的函数类B 中求函数A x p ∈)(,使 )(x p 与)(x f 的误差在某中度量意义下最小”。函数类A 通常是区间],[b a 上的连续函数,记作],[b a C ,称为连续函数空间,而函数类B 通常为n 次多项式,有理函数或分段低次多项式等,函数逼近是数值分析的基础。主要内容有: (1)最佳一致逼近多项式 (2)最佳平方逼近多项式 (3)曲线拟合的最小二乘法 二、实验要求: 1、构造正交多项式; 2、构造最佳一致逼近; 3、构造最佳平方逼近多项式; 4、构造最小二乘法进行曲线拟合; 5、求出近似解析表达式,打印出逼近曲线与拟合曲线,且打印出其在数据点上的偏差; 6、探讨新的方法比较结果。 三、实验目的和意义: 1、学习并掌握正交多项式的MATLAB 编程; 2、学习并掌握最佳一致逼近的MATLAB 实验及精度比较;
3、学习并掌握最佳平方逼近多项式的MATLAB 实验及精度比较; 4、掌握曲线拟合的最小二乘法; 5、最小二乘法也可用于求解超定线形代数方程组; 6、 探索拟合函数的选择与拟合精度之间的关系; 四、 算法步骤: 1、正交多项式序列的生成 {n ?(x )}∞ 0:设n ?(x )是],[b a 上首项系数a ≠n 0的n 次多项式,)(x ρ为],[b a 上权函数,如果多项式序列{n ?(x )} ∞0 满足关系式???=>≠==?.,0,, 0)()()()(),(k j A k j x d x x x k k j b a k j ??ρ?? 则称多项式序列{n ?(x )}∞ 0为在],[b a 上带权)(x ρ正交,称n ?(x )为],[b a 上带权)(x ρ 的n 次正交多项式。 1)输入函数)(x ρ和数据b a ,; 2)分别求))(),(()),(,(x x x x j j j n ???的内积; 3)按公式①)()) (),(()) (,()(,1)(1 0x x x x x x x x j n j j j j n n n ??? ???∑-=- ==计算)(x n ?,生成正交多项式; 流程图: 开始
基于最小二乘法的系统辨识的设计与开发(整理版)
---------------------------------------------------------------最新资料推荐------------------------------------------------------ 基于最小二乘法的系统辨识的设计与开发(整理版)课程(论文)题目: 基于最小二乘法的系统辨识摘要: 最小二乘法是一种经典的数据处理方法。 最小二乘的一次性完成辨识算法(也称批处理算法),他的特点是直接利用已经获得的所有(一批)观测数据进行运算处理。 在系统辨识领域中, 最小二乘法是一种得到广泛应用的估计方法, 可用于动态系统, 静态系统, 线性系统, 非线性系统。 在随机的环境下,利用最小二乘法时,并不要求观测数据提供其概率统计方面的信息,而其估计结果,却有相当好的统计特性。 关键词: 最小二乘法;系统辨识;参数估计 1 引言最小二乘理论是有高斯( K.F.Gauss)在 1795 年提出: 未知量的最大可能值是这样一个数值,它使各次实际观测值和计算值之间的差值的平方乘以度量其精度的数值以后的和最小。 这就是最小二乘法的最早思想。 最小二乘辨识方法提供一个估算方法,使之能得到一个在最小方差意义上与实验数据最好拟合的数学模型。 递推最小二乘法是在最小二乘法得到的观测数据的基础上,用新引入的数据对上一次估计的结果进行修正递推出下一个参数估计值,直到估计值达到满意的精确度为止。 1 / 10
对工程实践中测得的数据进行理论分析,用恰当的函数去模拟数据原型是一类十分重要的问题,最常用的逼近原则是让实测数据和估计数据之间的距离平方和最小,这即是最小二乘法。 最小二乘法是一种经典的数据处理方法。 在随机的环境下,利用最小二乘法时,并不要求观测数据提供其概率统计方面的信息,而其估计结果,却有相当好的统计特性。 2 最小二乘法的系统辨识设单输入单输出线性定常系统的差分方程为: 1),()()() 1()(01knkubkubnkxakxakxnn ( 1)上式中: )(ku为输入信号;)(kx为理论上的输出值。 )(kx只有通过观测才能得到,在观测过程中往往附加有随机干扰。 )(kx的观测值)(ky可表示为 ( 2)将式( 2)代入式( 1)得 1()()() 1()(101kubkubnkyakyakyn (3) 我们可能不知道)(kn的统计特性,在这种情况下,往往把)(kn看做均值为 0 的白噪声。 设 ( 4)则式( 3)可以写成 (5) 在测量)(ku时也有测量误差,系统内部也可能有噪声,应当
数值计算_第6章 曲线拟合的最小二乘法
第6章曲线拟合的最小二乘法 6.1 拟合曲线 通过观察或测量得到一组离散数据序列,当所得数据比较准确时,可构造插值函数逼近客观存在的函数,构造的原则是要求插值函数通过这些数据点,即。此时,序列与 是相等的。 如果数据序列,含有不可避免的误差(或称“噪音”),如图6.1 所示;如果数据序列无法同时满足某特定函数,如图6.2所示,那么,只能要求所做逼近函数最优地靠近样点,即向量与的误差或距离最小。按与之间误差最小原则作为“最优”标准构造的逼近函数,称为拟合函数。 图6.1 含有“噪声”的数据 图6.2 一条直线公路与多个景点 插值和拟合是构造逼近函数的两种方法。插值的目标是要插值函数尽量靠近离散点;拟合的目标是要离散点尽量靠近拟合函数。 向量与之间的误差或距离有各种不同的定义方法。例如: 用各点误差绝对值的和表示: 用各点误差按模的最大值表示: 用各点误差的平方和表示: 或(6.1)
其中称为均方误差,由于计算均方误差的最小值的方法容易实现而被广泛采用。按 均方误差达到极小构造拟合曲线的方法称为最小二乘法。本章主要讲述用最小二乘法构造拟合曲线的方法。 在运筹学、统计学、逼近论和控制论中,最小二乘法都是很重要的求解方法。例如,它是统计学中估计回归参数的最基本方法。 关于最小二乘法的发明权,在数学史的研究中尚未定论。有材料表明高斯和勒让德分别独立地提出这种方法。勒让德是在1805年第一次公开发表关于最小二乘法的论文,这时高斯指出,他早在1795年之前就使用了这种方法。但数学史研究者只找到了高斯约在1803年之前使用了这种方法的证据。 在实际问题中,怎样由测量的数据设计和确定“最贴近”的拟合曲线?关键在选择适当的拟合曲线类型,有时根据专业知识和工作经验即可确定拟合曲线类型;在对拟合曲线一无所知的情况下,不妨先绘制数据的粗略图形,或许从中观测出拟合曲线的类型;更一般地,对数据进行多种曲线类型的拟合,并计算均方误差,用数学实验的方法找出在最小二乘法意义下的误差最小的拟合函数。 例如,某风景区要在已有的景点之间修一条规格较高的主干路,景点与主干路之间由各具特色的支路联接。设景点的坐标为点列;设主干路为一条直线 ,即拟合函数是一条直线。通过计算均方误差最小值而确定直线方程(见图6.2)。 6.2线性拟合和二次拟合函数 线性拟合 给定一组数据,做拟合直线,均方误差为 (6.2) 是二元函数,的极小值要满足 整理得到拟合曲线满足的方程:
用matlab实现最小二乘递推算法辨识系统参数
自动化专业综合设计报告 设计题目:最小二乘递推算法辨识系统参数所在实验室:自动化系统仿真实验室 指导教师: 学生姓名 班级计082-2 班 学号 撰写时间:2012-3-1 成绩评定:
一.设计目的 1、学会用Matlab实现最小二乘法辨识系统参数。 2、进一步熟悉Matlab的界面及基本操作; 3、了解并掌握Matlab中一些函数的作用与使用; 二.设计要求 最小二乘递推算法辨识系统参数,利用matlab编程实现,设初始参数为零。z(k)-1.5*z(k-1)+0.7*z(k-2)=1*u(k-1)+0.5*u(k-2)+v(k); 选择如下形式的辨识模型: z(k)+a1*z(k-1)+a2*z(k-2)=b1*u(k-1)+b2*u(k-2)+v(k); 三.实验程序 m= 3; N=100; uk=rand(1,N); for i=1:N uk(i)=uk(i)*(-1)^(i-1); end yk=zeros(1,N); for k=3:N yk(k)=1.5*yk(k-1)-0.7*yk(k-2)+uk(k-1)+0.5*uk(k-2); end %j=100;kn=0; %y=yk(m:j)'; %psi=[yk(m-1:j-1);yk(m-2:j-2);uk(m-1:j-1);uk(m-2:j-2)]'; %pn=inv(psi'*psi); %theta=(inv(psi'*psi)*psi'*y); theta=[0;0;0;0]; pn=10^6*eye(4); for t=3:N ps=([yk(t-1);yk(t-2);uk(t-1);uk(t-2)]); pn=pn-pn*ps*ps'*pn*(inv(1+ps'*pn*ps)); theta=theta+pn*ps*(yk(t)-ps'*theta); thet=theta'; a1=thet(1); a2=thet(2); b1=thet(3); b2=thet(4); a1t(t)=a1; a2t(t)=a2;b1t(t)=b1;b2t(t)=b2; end t=1:N; plot(t,a1t(t),t,a2t(t),t,b1t(t),t,b2t(t));
(完整word版)多种最小二乘算法分析+算法特点总结
第一部分:程序设计思路、辨识结果分析和算法特点总结 (2) 一:RLS遗忘因子法 (2) RLS遗忘因子法仿真思路和辨识结果 (2) 遗忘因子法的特点: (3) 二:RFF遗忘因子递推算法 (4) 仿真思路和辨识结果 (4) 遗忘因子递推算法的特点: (5) 三:RFM限定记忆法 (5) 仿真思路和辨识结果 (5) RFM限定记忆法的特点: (7) 四:RCLS偏差补偿最小二乘法 (7) 仿真思路和辨识结果 (7) RCLS偏差补偿最小二乘递推算法的特点: (9) 五:增广最小二乘法 (9) 仿真思路和辨识结果 (9) RELS增广最小二乘递推算法的特点: (11) 六:RGLS广义最小二乘法 (12) 仿真思路和辨识结果 (12) RGLS广义最小二乘法的特点: (14) 七:RIV辅助变量法 (14) 仿真思路和辨识结果 (14) RIV辅助变量法的特点: (16) 八:Cor-ls相关最小二乘法(二步法) (17) 仿真思路和辨识结果 (17) Cor-ls相关最小二乘法(二步法)特点: (18) 九:MLS多级最小二乘法 (19) 仿真思路和辨识结果 (19) MLS多级最小二乘法的特点: (22) 十:yule_walker辨识算法 (23) 仿真思路和辨识结果 (23) yule_walker辨识算法的特点: (24) 第二部分:matlab程序 (24) 一:RLS遗忘因子算法程序 (24) 二:RFF遗忘因子递推算法 (26) 三:RFM限定记忆法 (28) 四:RCLS偏差补偿最小二乘递推算法 (31) 五:RELS增广最小二乘的递推算法 (33) 六;RGLS 广义最小二乘的递推算法 (36) 七:Tally辅助变量最小二乘的递推算法 (39) 八:Cor-ls相关最小二乘法(二步法) (42) 九:MLS多级最小二乘法 (45) 十yule_walker辨识算法 (49)
系统辨识最小二乘法大作业
系统辨识最小二乘法大作业 系统辨识大作业最小二乘法及其相关估值方法应用 学院:自动化学院 专业:信息工程 学号:2007302171 姓名:马志强 日期:2010.11.14 基于最小二乘法的多种系统辨识方法研究 1. 最小二乘法的引出 在系统辨识中用得最广泛的估计方法是最小二乘法(LS)。 设单输入-单输出线性定长系统的差分方程为 (5.1.1) 式中:为随机干扰;为理论上的输出值。只有通过观测才能得到,在观测过程中往往附加有随机干扰。的观测值可表示为
(5.1.2) 式中:为随机干扰。由式(5.1.2)得 (5.1.3) 将式(5.1.3)带入式(5.1.1)得 (5.1.4) 我们可能不知道的统计特性,在这种情况下,往往把看做均值为0的白噪声。 设 (5.1.5) 则式(5.1.4)可写成 (5.1.6) 在观测时也有测量误差,系统内部也可能有噪声,应当考虑它们的影响。因此假定不仅包含了的测量误差,而且包含了的测量误差和系统内部噪声。假定是不相关随机序列(实际上是相关随机序列)。 现分别测出个随机输入值,则可写成个方程,即 上述个方程可写成向量-矩阵形式 (5.1.7) 设 则式(5.1.7)可写为 (5.1.8) 式中:为维输出向量;为维噪声向量;为维参数向量;为测量矩阵。因此式(5.1.8)是一个含有个未知参数,由个方程组成的联立方程组。如果,方程数少于未知数数目,则方程组的解是不定的,不能唯一地确定参数向量。如果,方程组正好与未知数数目相等,当噪声时,就能准确地解出 (5.1.9) 如果噪声,则
(5.1.10) 从上式可以看出噪声对参数估计是有影响的,为了尽量较小噪声对估值的影响。在给定输出向量和测量矩阵的条件下求系统参数的估值,这就是系统辨识问题。可用最小二乘法来求的估值,以下讨论最小二乘法估计。 2. 最小二乘法估计算法 设表示的最优估值,表示的最优估值,则有 (5.1.11) 写出式(5.1.11)的某一行,则有 (5.1.12) 设表示与之差,即 - (5.1.13) 式中 成为残差。把分别代入式(5.1.13)可得残差。设 则有 (5.1.14) 最小二乘估计要求残差的平方和为最小,即按照指数函数 (5.1.15) 为最小来确定估值。求对的偏导数并令其等于0可得 (5.1.16) (5.1.17) 由式(5.1.17)可得的最小二乘估计 (5.1.18) 3.递推最小二乘法 为了实现实时控制,必须采用递推算法,这种辨识方法主要用于在线辨识。 设已获得的观测数据长度为,将式(5.1.8)中的和分别用来代替, 即 (5.3.1) 用的最小二乘估计,则 (5.3.2)
基于最小二乘算法的RBF
基于正交最小二乘算法的RBF神经网络 一、实验环境 硬件平台Win10 64位操作系统,1.5GHZ,4G内存,软件版本MA TLAB2015b 二、实验数据 训练数据集: T F W M Y Q 1000.00130010000 20.00740.03350.00150.00320.010610000 30.00430.022300.00470.005310000 40.5520.30170.25810.30940.231601000 50.54520.27930.26110.29880.203601000 60.55020.24580.27170.31150.234701000 70.24620.15080.09470.09640.099900100 80.25350.10610.09680.09710.08100100 90.26650.08940.09370.09940.090800100 100.66150.52510.51950.471100010 110.67380.44130.52250.47320.966700010 120.66650.47490.52550.47690.975800010 13110.981210.820600001 140.97970.977710.9960.775900001 150.98460.97270.98470.98570.7600001 测试数据集: T F W M Y Q 10.00310.02350.00050.0030.004510000 20.54930.26260.26590.30880.222101000 30.25720.10060.09580.09810.08900100 40.67040.49720.52350.47410.979100010 50.9920.98990.99790.99370.797900001 三、算法介绍 RBF函数网络从结构上看是一个3层前馈网络,包括一个输入层、一个输出层和一个隐含层。输入层节点的作用是将输入数据传递到隐含层节点。隐含层节点称为RBF节点,其激活函数为辐射状函数的神经元构成,通常采用高斯型函数:Array 图1 RBF结构 RBF网络中所用的非线性函数的形式对网络性能的影响并不是至关重要的,关键因素是基函数中心的选取,中心选取不当构造出来的RBF网络的性能一般不能令人满意。例如,如果某些中心靠的太近,会产生近似线形相关,从而带来数值上的病变条件。基本的RBF 神经网络采用随机抽取固定中心的方法,在输入样本数据的分布具有某种特性的情况下,采用这种方法解决给定问题就显得简单可行了。而针对其缺陷,已经有许多改进的方法,其中 之一就是利用最小二乘法选取中心,训练网络权重。
最小二乘法
第3章 线性动态模型参数辨识-最小二乘法 3.1 辨识方法分类 根据不同的辨识原理,参数模型辨识方法可归纳成三类: ① 最小二乘类参数辨识方法,其基本思想是通过极小化如下准则函数来估计模型参数: min )()? (?== ∑=θ θL k k J 1 2ε 其中)(k ε代表模型输出与系统输出的偏差。典型的方法有最小二乘法、增广最小二乘法、辅助变量法、广义最小二乘法等。 ② 梯度校正参数辨识方法,其基本思想是沿着准则函数负梯度方向逐步修正模型参数,使准则函数达到最小,如随机逼近法。 ③ 概率密度逼近参数辨识方法,其基本思想是使输出z 的条件概率密度)|(θz p 最大限度地逼近条件0θ下的概率密度)|(0θz p ,即 )|()?|(0m a x θθz p z p ??→?。典型的方法是极大似然法。 3.2 最小二乘法的基本概念 ● 两种算法形式 ① 批处理算法:利用一批观测数据,一次计算或经反复迭代,以获得模型参数的估计值。 ② 递推算法:在上次模型参数估计值)(? 1-k θ的基础上,根据当前 获得的数据提出修正,进而获得本次模型参数估计值)(? k θ,广泛采用的递推算法形式为 () ()()()~()θθk k k k d z k =-+-1K h 其中)(? k θ表示k 时刻的模型参数估计值,K (k )为算法的增益,h (k -d ) 是由 观测数据组成的输入数据向量,d 为整数,)(~k z 表示新息。 ● 最小二乘原理
定义:设一个随机序列)},,,(),({L k k z 21∈的均值是参数θ 的线性函数 E{()}()T z k k θ=h 其中h (k )是可测的数据向量,那么利用随机序列的一个实现,使准则函数 21 ()[()()]L T k J z k k θθ==-∑h 达到极小的参数估计值θ? 称作θ的最小二乘估计。 ● 最小二乘原理表明,未知参数估计问题,就是求参数估计值θ? ,使序列的估计值尽可能地接近实际序列,两者的接近程度用实际序列与序列估计值之差的平方和来度量。 ● 如果系统的输入输出关系可以描述成如下的最小二乘格式 ()()()T z k k e k θ=+h 式中z (k )为模型输出变量,h (k )为输入数据向量,θ为模型参数向量,e (k )为零均值随机噪声。为了求此模型的参数估计值,可以利用上述最小二乘原理。根据观测到的已知数据序列)}({k z 和)}({k h ,极小化下列准则函数 21()[()()]L T k J z k k θθ==-∑h 即可求得模型参数的最小二乘估计值θ? 。 ● 最小二乘估计值应在观测值与估计值之累次误差的平方和达到最小值处,所得到的模型输出能最好地逼近实际系统的输出。 3.3 最小二乘问题的描述 (1) 考虑模型 )()()()()(11k e k u z B k z z A +=-- 式中u (k )和z (k ) 分别为过程的输入和输出变量,e (k )是均值为零、方差为2 n σ的随机噪声,)(1-z A 和)(1-z B 为迟延算子多项式,写成 A z a z a z a z B z b z b z b z n n n n a a b b ()()--------=++++=+++?????11122111221 (2) 假定模型阶次n a 和n b 为已知,且有b a n n ≥,也可设n n n b a ==, 并定义