全站仪在建筑工程测量中的运用Word 文档
全站仪在建筑工程测量中的运用
代世杰(黄石理工学院湖北黄石 435000)
摘要:文章结合一些工作中的实例阐述了全站仪在建筑轴放样、三角高程测量具体运用,并提出了在运用过程中应注意的问题。
关键词:全站仪建筑轴线放样三角高程测量
1 前言
随着电子技术和计算机技术日新月异的发展及其在测绘领域的广泛应用,集电子测角、电子测距、数据采集与存储的全站仪已经取代了常规的光学经纬仪和s3
光学水准仪。各测绘仪器厂商生产出各种型号的全站仪,出现了大内存、多功能、防水型、防爆型、电脑型等,全站仪正朝着功能全、效率高、全自动、易操作、体积小、重量轻的方向发展,使野外测绘作业的劳动强度逐渐地减轻,工作效率得到不断提高,测绘技术水平也相应地得到了提升,从根本上更新了测量的观念和理论。
传统的测量方式正逐步被不断涌现的新仪器、新技术、新方法所取代。目前在建筑工程测量经常采用的仪器就是全站仪,笔者将结合工程实例来讲述全站仪在建筑工程的测量中的运用。
2 建筑轴线放样
在建筑工程中,主轴线是各项工作展开的重要施工依据。针对深圳万科第五园五期12号楼基础施工阶段,现场地形复杂,通视障碍较多,导致测量施工的难度和强度增加。运用传统的方法对其主轴线测设较为困难,更重要的是12号楼为半预制半现浇装配式结构,对主轴线测设精度要求较高。于是我们采用全站仪器对主轴线放样。具体方法如下:
1)如图1所示,P1,P2,P3均为在坐标放样中测设出的坐标点。将全站仪架设在P1点上,将仪器对中,整平;
2)因为全站仪以北方﹑东方向为正方向,故须确定原点位置。在测量模式第一页菜单下按〔坐标〕进入
﹝坐标测量﹞屏幕。选取“测站坐标”后按〔编辑〕输入测站点坐标
P1(N0:0.000,E0:0.000,Z0:任意值)仪器高和目标高值可以适用仪器默认值,原因是轴线测设是在二维空间中进行的;
3)后视站点的选取,轴网图2中能作为后视点的有P1,P3点,但是一般选离测站点较远的一点作为后视点;
4)后视站点的坐标输入,P3(N:85.170,E;32.345,Z:任意值),这样就在二维空间中建立了X-Y坐标系,如图2所示;
5)司镜员将棱镜架在P3点处整平,全站仪对准棱镜中心,进行后视定向。若观测结果为(N:85.170,E:32.345,Z:任意值)可以进行轴线测设;
6)欲在垫层A上放出7轴线和G轴线,首先通过轴网图2计算出P1点到7号轴线的垂直距离25.665m;P1点到G轴线的垂直距离3.150m;
7)司镜员在垫层A上,大概估测下7轴线的位置,在垫层上用红蓝铅笔画出两条相较的直线,将棱镜架设在两直线相较的交点上,整平并将棱镜镜头对准全站仪;
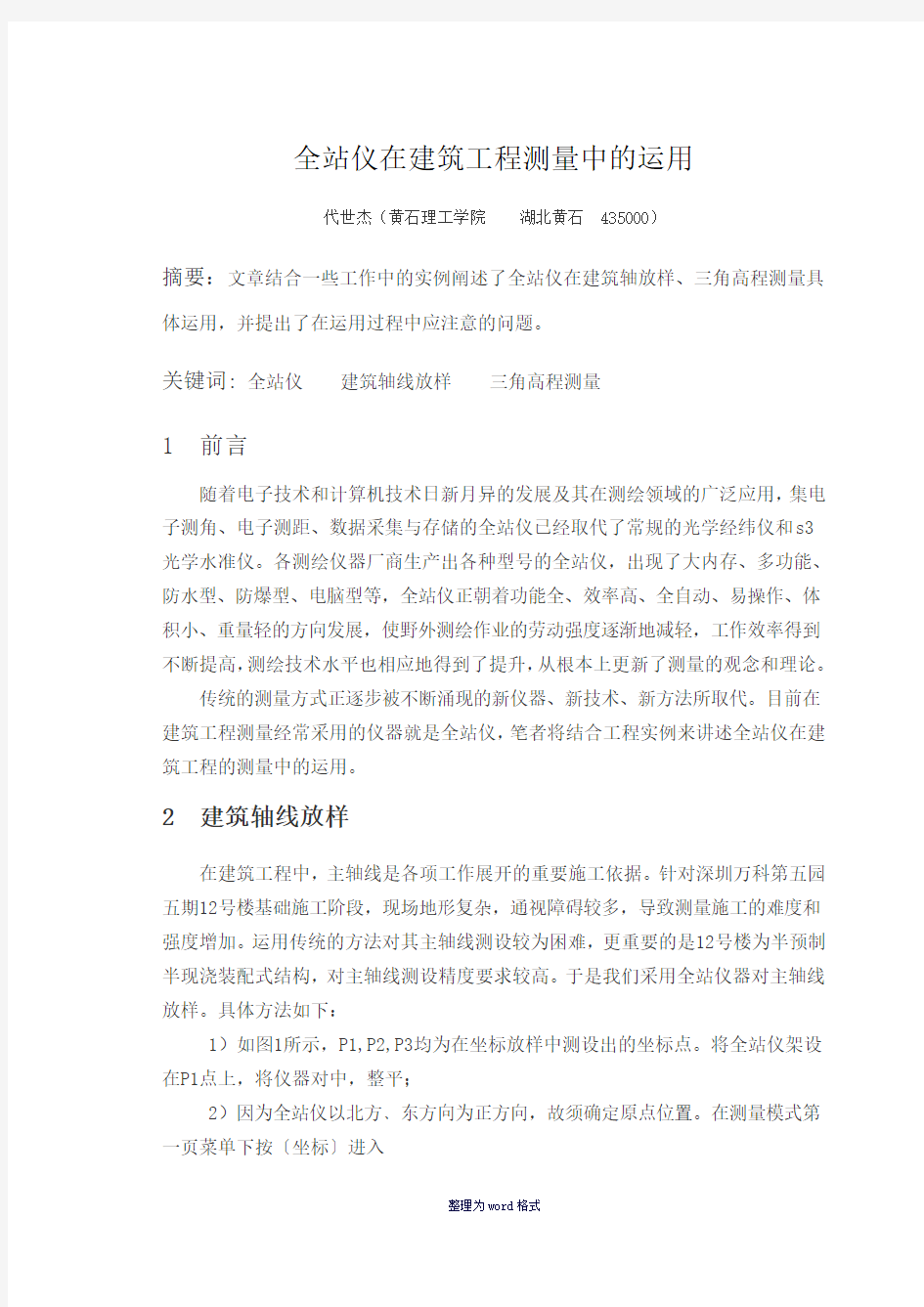
8)用全站仪照准棱镜,点击〔观测〕按钮,结果为(N:25673,E:任意值,Z:任意值)。如下图2所示
图2 仪器显示
N=25.673m,而所需的目标值为:N′=25.665m理论目标测量值与实际测量值之差:△= N′- N=25.665-25.673=-0.008m
9) △=-0.008m<0,棱镜向大致平行于X轴,向X轴负方向移动8㎜,此处可以用卷尺量;若△>0,棱镜就要向X轴正方向移动△的绝对值;
10)将棱镜移至到新点之后,整平镜架,用全站仪观测N值,当△值在±3㎜范围内可以定下7轴线上一点Q1;
11)重复(7)-(10)工作,定出7轴线上的另一点Q2,连接Q1和Q2两点弹线,这样就定出了7轴线在垫层A上的位置;
12)进行G轴线的放样,其放样方法与7轴线基本相同,不同点是在进行(8)工作时,测量结果只须E=3.150m;
13)用此方法进行轴线放样应注意:定坐标原点,将全站仪架设在图2中P1点上,对中整平,进入站点坐标的输入:P1(N0:0.000,E0:0.000,Z:0.000或任意值)定后视点坐标是整个工作成功的关键所在,因为后视点坐标输入决定者X轴与Y轴的正放向。例如:若后视点定为P3,后视点坐标输入P3(N:85.170,E:32.345,Z:任意值)那么坐标系如下图3-1所示
图3-1 X-Y坐标系
若后视点坐标输入为P3(N:32.345,E:85.170,Z:任意值)那么坐标系如下图3-2:
图3-2 Y-X坐标系
由上面例子可见定后视点以及后视点坐标输入是此工法关键所在。
3 用新方法进行高程测量
在工程的施工过程中,常常涉及到高程测量。传统的测量方法是水准测量、三角高程测量。两种方法虽然各有特色,但都存在着不足。水准测量是一种直
接测高法,测定高差的精度是较高的,但水准测量受地形起伏的限制,外业工
作量大,施测速度较慢。三角高程测量是一种间接测高法,它不受地形起伏的
限制,且施测速度较快,在大比例地形图测绘、线型工程、管网工程等工程测
量中广泛应用。但精度较低,且每次测量都得量取仪器高、棱镜高,麻烦而且
增加了误差来源。随着全站仪的广泛使用,使用对中杆配合全站仪测量高程的
方法越来越普及,使用传统的三角高程测量方法已经显示出了它的局限性。经
过长期摸索,总结出一种新的方法进行三角高程测量。这种方法既结合了水准
测量的任一置站的特点,又减少了三角高程的误差来源,同时每次测量时还不
必量取仪器高、棱镜高。使三角高程测量精度进一步提高,施测速度更快。
3.1利用新方法高程测量
万科第五园公路二合同段地处平原微丘,虽地势较平坦,但一些GPS高程控制点离路线较远,高差较大,这些都加大水准点复测以及施工过程中的水准点加密的工作量。由于施工工期紧、测量人员有限,采用新的全站仪测量高程,提高了施测速度及精度,满足了工程进度的需要。
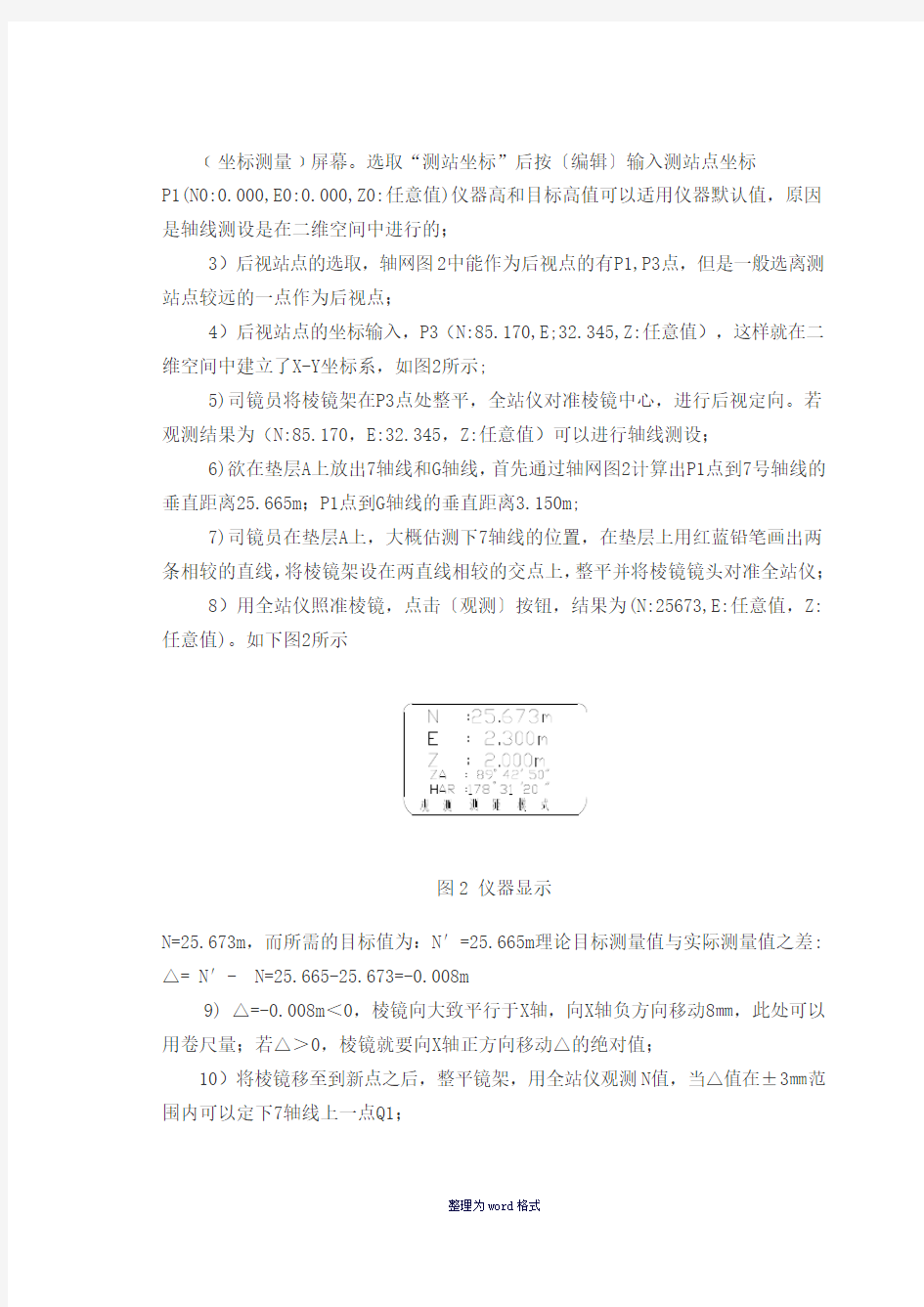
基本原理:
Ha=Ho+D1×tgа1+i-t ①
Hb=Ho+D1×tgа2+i-t ②
D2 D1
图4 新三角高程测量示意图
把全站仪架设在任意点Ho,把棱镜跟踪杆的高度定死后架设在已知高程水准点A之上。根据三角高程的基本原理:全站仪的视线高为:
W=Ha+t-D1×tgа1=Ho+i
再把棱镜杆架设到未知高程点B,由于仪器架设完毕后i值不变。棱镜杆架设到B点后不改变高度,t值也不变。
Hb=Ho+D2×tgа2+i-t ③
= Ha-D1×tgа1-i+t + D2×tgа2+i-t
= Ha-D1×tgа1 + D2×tgа2
所以 Hb= Ha-D1×tgа1+D2×tgа2 ④
1)由此可知Ho对B点高程没有关系,影响B点高程测量精度的只有D1、D2和а1、а2及棱镜头的瞄准误差。全站仪的测距精度可达到Md=±1.33,距离不会有问题。考虑地球曲率对距离的影响,全站仪曲率改正设为:0.142。在瞄准目标时,我们在棱镜头的砧板上,贴上2mm宽黑色反光条,在对准A 点时与B点时瞄准同一个位置,抵消跟踪杆的高差,在天气晴好时,前后视距距离可以达300—800m 。
2)可以得出的数据:(1)算得待测点高程:Hb=Ha-V1+ V2;
(2)仪器视线高程:W=Ha-V1;
(3)将数据W输入坐标测量的测站高程,将仪器
高和棱镜高设为0,进入坐标测量界面,则测得的高
程将直接显示在坐标测量的Z值中,移动跟踪杆得到
待测各点的高程数据。
3.2工程实例
现在以深圳市万科第五园四期展示楼为例,利用新方法高程测量。
如图5所示,已知A号点高程H A=83.30m,欲测量出B号点高程H B;