某温度控制系统的MATLAB仿真
课程设计报告
题目某温度控制系统的MATLAB仿真(题目C)
过程控制课程设计任务书
题目C :某温度控制系统的MATLAB 仿真
一、 系统概况:
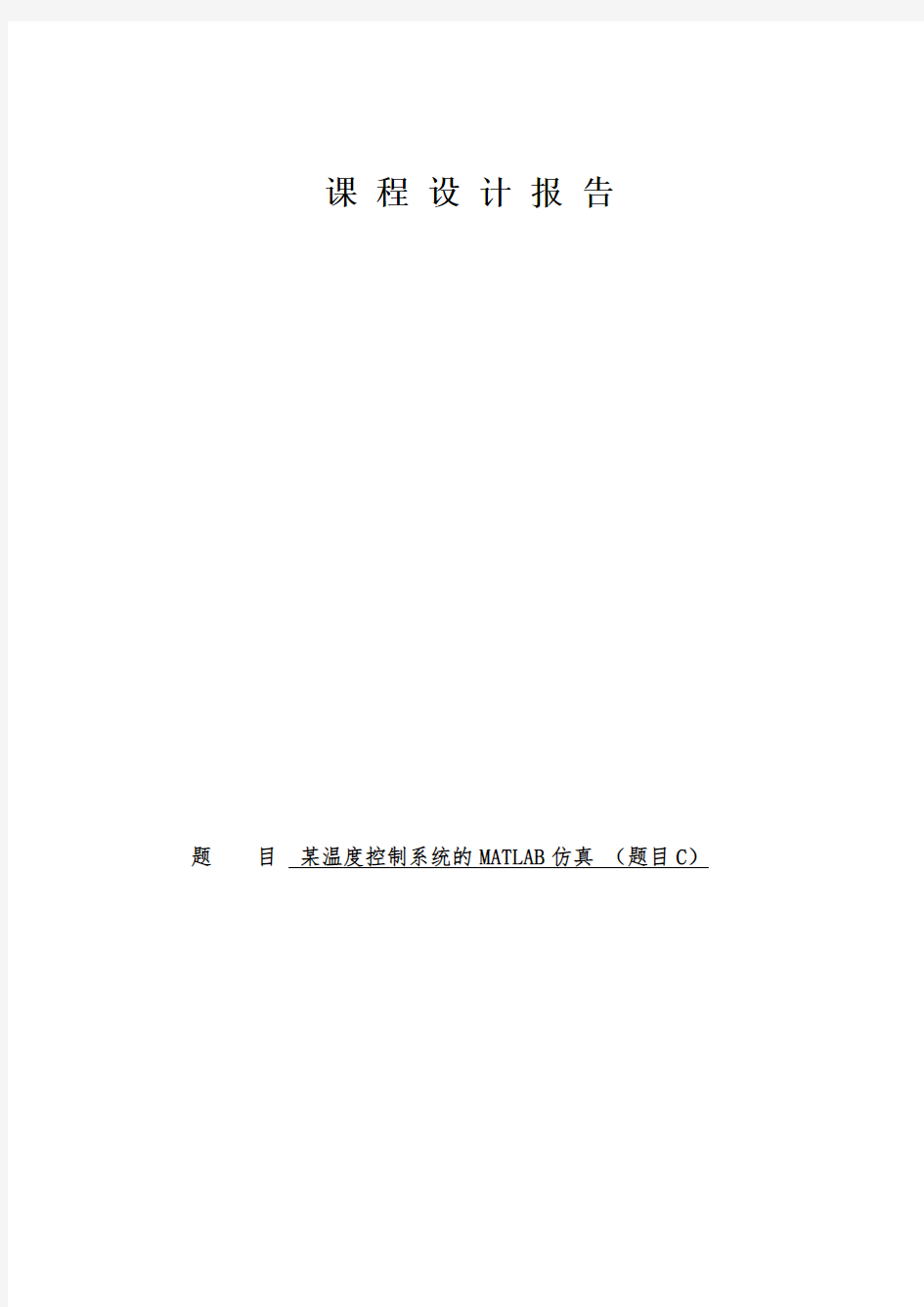
设某温度控制系统方块图如图:
图中G c (s)、G v (s)、G o (s)、G m (s)、分别为调节器、执行器、过程对象及温度变送器的传递函数;,且电动温度变送器测量范围(量程)为50~100O C 、输出信号为4~20mA 。G f (s)为干扰通道的传递函数。
二、系统参数
二、 要求:
1、分别建立仿真结构图,进行以下仿真,并求出主要性能指标:
(1)控制器为比例控制,其比例度分别为δ=10%、20%、50%、100%、200%时,系统广义对象输出z(t)的过渡过程;
(2)控制器为比例积分控制,其比例度δ=20%,积分时间分别为T I =1min 、3min 、5min 、10min 时,z(t)的过渡过程;
(3)控制器为比例积分微分控制,其比例度δ=10%,积分时间T I =5min ,微分时间T D = 0.2min 时,z(t)的过渡过程。
2、对以上仿真结果进行分析比对,得出结论。
3、撰写设计报告。
0m v o
0f o o =5min =2.5min =1.5(kg/min)/mA =5.4C/(kg/min) =0.8 C C T T K K K x(t)=80f(t)=10;
;;;
;给定值;
阶跃扰动
注:调节器比例带δ的说明
比例控制规律的输出p(t)与输入偏差信号e(t)之间的关系为
式中,K c 叫作控制器的比例系数。
在过程控制仪表中,一般用比例度δ来表示比例控制作用的强弱。比例度δ定义为
式中,(z max -z min )为控制器输入信号的变化范围,即量程;(p max -p min )为控制器输出信号的变化范围。
这时δ 与K c 便互成倒数关系,即:
但如果调节器的输入、输出不是相同性质的信号,则系数K ≠1,需要根据量程和输出信号范围进行计算。
例:某温度系统中,调节器为电动比例调节器,配用的电动变送器测量范围为40~150 O C ,
=c p(t)K e(t)max
min (
)
=
100%)max min e z z p (p -p δ-?=100%c
1K δ?
输出为4~20mA,若选用比例度δ=10%,问该比例调节器的比例系数K c为多少?
解:
max min
max min
=
204
= 1.45
0.115040
c
c
p p
1
K
z z
1
K
δ
-
?
-
-
∴?=
-
仿真过程
一,控制器为比例控制P
对于比例控制器:
其传递关系为:(t))(e K y p t =
控制器的传递函数为:p t K G =)(
纯比例控制仿真结构图如下:
(1)当比例度为δ=10% 2.350-1004-201.01--1
min
max min
max =?=∴?
=c c K Z Z P P K δ 即仿真图中Kc 为3.2,给定值和阶跃扰动分别设置为80,10
则有仿真得系统广义对象输出z(t)的过渡过程如图:
其主要性能指标如下:
上升时间tr=2.4min;
峰值时间tp=3.2min ; 最大超调量48.75%8080-119==p σ;
过渡时间ts=10min;
震荡次数N=3;
稳态误差ss e =10OC
(2)比例度为δ=20% 1.650-1004-202.01=?=c K ,将仿真图中Kc 参数改为1.6即可,仿真得系统广义对象输出z(t)的过渡过程如下图:
主要性能指标如下:
上升时间tr=3min;
峰值时间tp=4min ; 最大超调量31.25%8080-105==p σ;
过渡时间ts=10min;
震荡次数N=2;
稳态误差ss e =5OC
(3)比例度为δ=50% 0.6450
-1004-205.01=?=c K ,将图1中K 参数改为0.64即可,仿真得系统广义对象输出z(t)的过渡过程如下图:
主要性能指标如下:
上升时间tr=4.2min;
峰值时间tp=5min ; 最大超调量12.5%8080-90==p σ;
过渡时间ts=10min;
震荡次数N=1;
稳态误差ss e =-5OC
(4)比例度为δ=100% 0.3250-1004-2011=?=c K ,将图1中K 参数改为0.32即可,仿真得系统广义对象输出z(t)的过渡过程如下图:
由图可知比例度度为δ=100%时,最大值小于80,达不到系统要求的稳定范围
(5)比例度为δ=200% 0.1650-1004-2021=?=c K ,将图1中K 参数改为0.16即可,仿真得系统广义对象输出z(t)的过渡过程如下图: