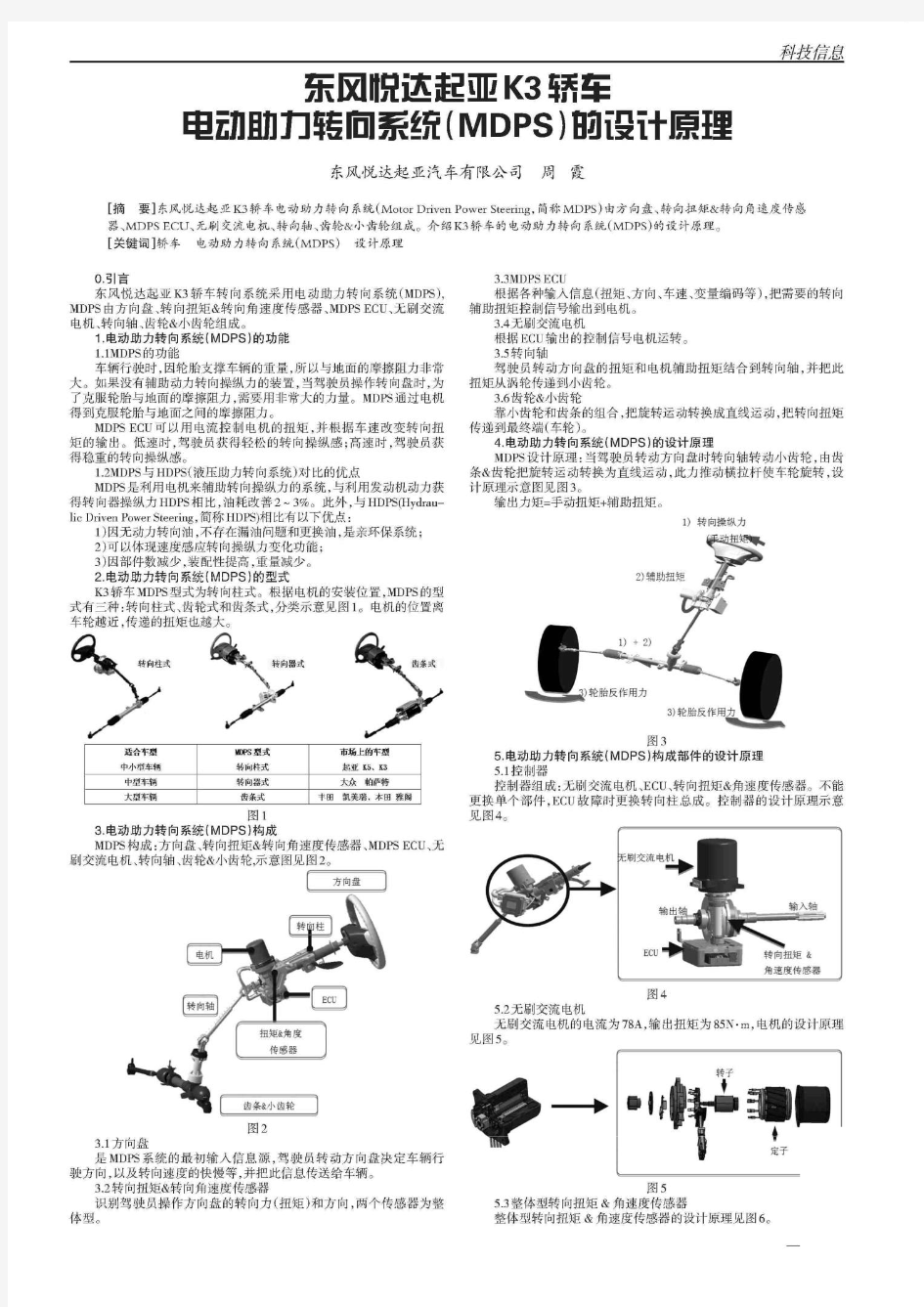
东风悦达起亚K3轿车电动助力转向系统(MDPS)的设计原理
智能循迹小车论文
智能循迹小车 ****电子与通信工程学院 队员:*** *** *** 前言 摘要 随着现代化的不断发展,自动化越来越普及,对传感器的应用越来越多,要求精度越来越搞高,本设计面向机械自动化发展,采用了AT89S52单片机作为控制核心,利用红外对管传感器检测黑线达到循迹目的,以及自动停车,自动寻迹,整体系统的电路结构简单,可靠性能高。 采用技术主要有: (1)AT89S52单片机应用; (2)L298电机驱动及PWN电机调速; (3)传感器的有效应用; (4)程序算法的应用。 关键字AT89S52 红外对管循迹 L298N PWM调速 18B20 霍尔传感元件 Intelligent follow obstacle-avoidance car Abstract With the continuous development of modernization and
automation increasingly popular, the application of sensor, demanding more and more get high, the precision mechanical automation development, design oriented adopted as control core and AT89S52 SCM by infrared sensor detects the pipe to follow black with ultrasonic ranging tracing purpose, the principle of automatic control electric cars and to detect obstacles obstacle avoidance, the color of speed, speed, and automatic parking, automatic tracing, overall system circuit structure is simple, reliable performance is high. This design is according to guangxi university students electronic design competition first stage three senior undergraduate group of topic, the topic request as table 1. Using technology mainly include: (1)AT89S52 Microcomputer application; (2)L298 motor drive and PWN; motor speed (3)Sensor effective application; (4)Program use of the algorithm. Keyword AT89S52 Infrared to tube follow mark PWM Ultrasonic obstacle avoidancTCS230 Color sensors
汽车的设计美学
汽车的设计美学 教育技术学雷贤 摘要:本文以设计美学规律为核心,针对现有汽车造型设计中,美学规律的应用及表现特点进行探讨,将相关理论进行诠释,系统地论述了汽车造型美的问题及其表现意象。并且在经济全球化的今天,进行汽车美学的探索具有重要的经济意义。 关键词:汽车设计,美学规律,造型艺术 1 汽车机械美学的萌芽 自从人类造物史发端,美的审视、实践与创造的循环往复,也逐渐成为一种精神活动与社会活动。随着科学、社会的发展,汽车已成为一种不可或缺的交通工具,市场、买家对汽车各方面的要求也越来越高,这种要求不仅表现在车辆的结构和性能方面,更表现在艺术造型方面。如果说汽车的功效和功能是产品的生命,那么,汽车的设计美学则是产品的灵魂。满足不同社会群体对汽车的美学要求,已经成为汽车设计行业一条全新的准则与命脉。设计美学规律是研究设计表现形式的美学特征,探讨其设计规律、艺术思维、表现形式与设计方法的学科。它是在总结前人研究美学经验及美学规律的基础上,针对设计的特殊性、情感性、文化性等方面总结归纳,并在长期的设计实践中,逐步提炼出具有创造性思维方法与表现技法的设计艺术美学规律。汽车设计师在设计过程中往往是依据这些设计美学规律,来提高美的创造能力和对形式变化的敏感性,以指导汽车造型设计。 所谓的汽车机械美学是指在研究汽车的产品设计美学规律的一种理论学说,其主要的创始人为勒·柯布西耶。作者在瑞士的工艺美术学校中接受培训,后被派往维也纳学习和工作。童年前往德国开始做机械的美学设计,深受德国设计思想的影响。不久之后去往法国,在法国认识了柏拉图等一批思想家和艺术家。七年之后,在发过发表了著名的《走向新建筑》,正是将机械中的美学开始提出,同时也首次将文化因子纳入美学之中。在书中,作者高度的赞扬了汽车设计的美,同时提出在这个世界中,我们正在发现不同的美学,并将这些美学强烈的融入到汽车、轮船的设计之中。同时在这个时期,基于功能主义,笔者提出了现代汽车设计的双重原则:一方面是通过经验满足客户的需求,另外一个方面通过抽象的形式来触动心灵感觉。这充分体现出文化因子开始融入机械美学中去。 2 汽车美学的发展
汽车转向系设计说明书
汽车设计课程设计说明书 题目:重型载货汽车转向器设计 姓名:席昌钱 学号:5 同组者:严炳炎、孔祥生、余鹏、李朋超、郑大伟专业班级:09车辆工程2班 指导教师:王丰元、邹旭东
设计任务书 目录 1.转向系分析 (4) 2.机械式转向器方案分析 (8) 3.转向系主要性能参数 (9) 4.转向器设计计算 (14) 5.动力转向机构设计 (16) 6.转向梯形优化设计 (22) 7.结论 (24) 8.参考文献 (25)
1转向系设计 基本要求 1.汽车转弯行驶时,全部车轮应绕瞬时转向中心旋转。 2.操纵轻便,作用于转向盘上的转向力小于200N。 3.转向系的角传动比在23~32之间,正效率在60%以上,逆效率在50%以上。 4.转向灵敏。 5.转向器和转向传动机构中应有间隙调整机构。 6.转向系应有能使驾驶员免遭或减轻伤害的防伤装置。 基本参数 1.整车尺寸: 11976mm*2395mm*3750mm。 2.轴数/轴距 4/(1950+4550+1350)mm 3.整备质量 12000kg 4.轮胎气压 2.转向系分析 对转向系的要求[3] (1) 保证汽车有较高的机动性,在有限的场地面积内,具有迅速和小半径转弯的能力,同时操作轻便; (2) 汽车转向时,全部车轮应绕一个瞬时转向中心旋转,不应有侧滑; (3) 传给转向盘的反冲要尽可能的小; (4) 转向后,转向盘应自动回正,并应使汽车保持在稳定的直线行驶状态; (5) 发生车祸时,当转向盘和转向轴由于车架和车身变形一起后移时,转向系统最好有保护机构防止伤及乘员. 转向操纵机构 转向操纵机构包括转向盘,转向轴,转向管柱。有时为了布置方便,减小由于装置位置误差及部件相对运动所引起的附加载荷,提高汽车正面碰撞的安全性以及便于拆装,在转向轴与转向器的输入端之间安装转向万向节,如图2-1。采用柔性万向节可减少传至转向轴上的振动,但柔性万向节如果过软,则会影响转向系的刚度。采用动力转向时,还应有转向动力系统。但对于中级以下的轿车和前轴负荷不超过3t的载货汽车,则多数仅在用机械转向系统而无动力转向装置。
循迹小车的设计与制作毕业设计论文
毕业论文声明 本人郑重声明: 1.此毕业论文是本人在指导教师指导下独立进行研究取得的成果。除了特别加以标注地方外,本文不包含他人或其它机构已经发表或撰写过的研究成果。对本文研究做出重要贡献的个人与集体均已在文中作了明确标明。本人完全意识到本声明的法律结果由本人承担。 2.本人完全了解学校、学院有关保留、使用学位论文的规定,同意学校与学院保留并向国家有关部门或机构送交此论文的复印件和电子版,允许此文被查阅和借阅。本人授权大学学院可以将此文的全部或部分内容编入有关数据库进行检索,可以采用影印、缩印或扫描等复制手段保存和汇编本文。 3.若在大学学院毕业论文审查小组复审中,发现本文有抄袭,一切后果均由本人承担,与毕业论文指导老师无关。 4.本人所呈交的毕业论文,是在指导老师的指导下独立进行研究所取得的成果。论文中凡引用他人已经发布或未发表的成果、数据、观点等,均已明确注明出处。论文中已经注明引用的内容外,不包含任何其他个人或集体已经发表或撰写过的研究成果。对本文的研究成果做出重要贡献的个人和集体,均已在论文中已明确的方式标明。 学位论文作者(签名): 年月
关于毕业论文使用授权的声明 本人在指导老师的指导下所完成的论文及相关的资料(包括图纸、实验记录、原始数据、实物照片、图片、录音带、设计手稿等),知识产权归属华北电力大学。本人完全了解大学有关保存,使用毕业论文的规定。同意学校保存或向国家有关部门或机构送交论文的纸质版或电子版,允许论文被查阅或借阅。本人授权大学可以将本毕业论文的全部或部分内容编入有关数据库进行检索,可以采用任何复制手段保存或编汇本毕业论文。如果发表相关成果,一定征得指导教师同意,且第一署名单位为大学。本人毕业后使用毕业论文或与该论文直接相关的学术论文或成果时,第一署名单位仍然为大学。本人完全了解大学关于收集、保存、使用学位论文的规定,同意如下各项内容: 按照学校要求提交学位论文的印刷本和电子版本;学校有权保存学位论文的印刷本和电子版,并采用影印、缩印、扫描、数字化或其它手段保存或汇编本学位论文;学校有权提供目录检索以及提供本学位论文全文或者部分的阅览服务;学校有权按有关规定向国家有关部门或者机构送交论文的复印件和电子版,允许论文被查阅和借阅。本人授权大学可以将本学位论文的全部或部分内容编入学校有关数据库和收录到《中国学位论文全文数据库》进行信息服务。在不以赢利为目的的前提下,学校可以适当复制论文的部分或全部内容用于学术活动。 论文作者签名:日期: 指导教师签名:日期: 毕业设计(论文)
汽车理论课程设计模板
序号: 汽车理论课程设计说明书 题目:汽车动力性计算 班级: 姓名: 学号: 序号: 指导教师: 目录 二.计算步骤 (4) 三.心得体会 (21) 四.参考资料 (21)
一.题目要求 1、 要求: 1) 根据书上所给的发动机使用外特性曲线拟合公式,绘制功率外特性和转矩外特性曲线; 2) 绘制驱动力---行驶阻力平衡图; 3) 绘制汽车等速行驶时发动机的负荷率图,画在一张图上(横坐标),格式见图1。 车速u a /(km/h) 负荷(率)U /(%) 图1 等速行驶时各挡发动机负荷(率) 4) 绘制动力特性图; 5) 绘制加速度曲线和加速度倒数曲线; 6) 绘制加速时间曲线,包括原地起步连续换挡加速时间和最高档和次高档加速时间(加速区间(初速度和 末速度)按照国家标准GB/T 12543-2009规定选取,并且在说明书中具体说明选取; 7) 列表表示最高挡和次高挡在20整数倍车速的参数值,格式见表1(注意:要将无意义的部分删除,比如 最高车速只有105km/h ,则120 km/h 对应的状况无意义,需要删除)。 8) 对动力性进行总体评价。
轻型货车的有关数据: i 0=5.94,ηT =0.88 发动机的最低转速m in n =600r/min ,最高转速m ax n =4000r/min 滚动阻力系数 f=0.013; 主减速器传动比 i=5.65 变速器传动比 i (数据见下表) 质心至前轴距离(满载) a=1.947m 质心高 g h =0.9m 二.计算步骤 1 由发动机使用外特性曲线拟合公式,绘制功率外特性和转矩外特性曲 线; 通过发动机使用外特性曲线拟合公式: 2 3 4 19.313295.27165.4440.874 3.84451000 100010001000tq n n n n T =-+?-?+?-??????? ? ? ??? ?? ?? 功率: 9550 n Ttq Pe ?= 得程序: n=600:4000; Ttq=-19.313+295.27*(n/1000)-165.44*(n/1000).^2+40.874*(n/1000).^3-3.8445*(n/1000).^4; %求转矩 Pe=Ttq.*n/9550; %求功率 plot(n,Pe) hold on plot(n,Ttq) xlabel('n(r/min)'),ylabel('Pe(Kw)') title('\itPe-n 和Ttq-n') gtext('Pe');gtext('Ttq'); 注:m in n =600r/min ,m ax n =4000r/min
汽车转向系统设计计算匹配方式方法
1 汽车转向系统的功能 1.1 驾驶者通过方向盘控制转向轮绕主销的转角而实现控制汽车运动方向。 对方向盘的输入有两种方式:对方向盘的角度输入和对方向盘的力输入。装有动力转向系统的汽车低速行驶时,操作方向盘的力很轻,却要产生很大的方向盘 转角输入,汽车的运动方向纯粹是由转向系统各杆件的几何关系所确定。这时, 基本上是角输入。而在高速行驶时,可能出现方向盘转角很小,汽车上仍作用有 一定的侧向惯性力,这时,主要是通过力输入来操纵汽车。 1.2 将整车及轮胎的运动、受力状况反馈给驾驶者。这种反馈,通常称为路感。 驾驶者可以通过手—---感知方向盘的震动及运转情况、眼睛—---观察汽车运动、 身体—---承受到的惯性、耳朵—---听到轮胎在地面滚动的声音来感觉、检测汽车 的运动状态,但最重要的的信息来自方向盘反馈给驾驶者的路感,因此良好的路 感是优良的操稳性中不可缺少的部分。 反馈分为力反馈和角反馈 从转向系统的功能可以得知:人、车通过转向系统组成了人车闭环系统,是驾驶者对汽车操纵控制的一个关键系统。 2 转向系统设计的基本要求 转向系是用来保持或者改变汽车行驶方向的机构,在汽车转向行驶时,保证各转向轮之间有协调的转角关系。转向系的基本要求如下: 2.1 汽车转弯时,全部车轮应绕瞬时回转中心(瞬心)旋转,任何车轮不应有侧滑。 不满足这项要求会加剧轮胎磨损,并降低汽车的操作稳定性。实际上,没有哪 一款汽车能完全满足这项要求,只能对转向梯形杆系进行优化,一般在常用转向 角(轮15°~25°围)使转向外轮运动关系逼近上述要求。 2.2 良好的回正性能 汽车转向动作完成后,在驾驶者松开方向盘的条件下,转向轮能自动返回到直线行驶位置,并稳定行驶。转向轮的回正力矩的大小主要由悬架系统所决定的前 轮定位参数确定,一般来说,影响汽车回正的因素有:轮胎侧偏特性、主销倾角、 主销后倾角、前轮外倾、转向节上下球节的摩擦损失、转向节臂长、转向系统的 逆效率等。 2.3汽车在任何行驶状态下,转向轮不得产生自振,方向盘没有摆动。 2.4 转向机构与悬架机构的运动不协调所造成的运动干涉应尽可能小,由于运动干涉使转向轮产生的摆动应最小。 汽车转弯行驶时,作用在汽车质心处的离心力的作用,轮载荷减小,外轮载荷
毕业论文设计转向系统设计
目录摘要2 第一章绪论3 1.1汽车转向系统概述3 1.2齿轮齿条式转向器概述9 1.3液压助力转向器概述10 1.4国内外发展情况12 1.5本课题研究的目的和意义12 1.6本文主要研究内容13 第二章汽车主要参数的选择14 2.1汽车主要尺寸的确定14 2.2汽车质量参数的确定16 2.3轮胎的选择17 第三章转向系设计概述18 3.1对转向系的要求18 3.2转向操纵机构18 3.3转向传动机构19 3.4转向器20 3.5转角及最小转弯半径20 第四章.转向系的主要性能参数22 4.1转向系的效率22 4.2传动比变化特性23 4.3转向器传动副的传动间隙△T25 4.4转向盘的总转动圈数26 第五章机械式转向器方案分析及设计26 5.1齿轮齿条式转向器26 5.2其他转向器28 5.3齿轮齿条式转向器布置和结构形式的选择29 5.4数据的确定29 5.5设计计算过程31 5.6齿轮轴的结构设计35 5.7轴承的选择35 5.8转向器的润滑方式和密封类型的选择35 5.动力转向机构设计36 5.1对动力转向机构的要求36 5.2动力转向机构布置方案36 5.3液压式动力转向机构的计算38 5.4动力转向的评价指标43
6. 转向传动机构设计45 6.1转向传动机构原理45 6.2转向传送机构的臂、杆与球销47 6.3转向横拉杆及其端部47 6.4杆件设计结果48 7.结论49 致谢49 摘要 本课题的题目是转向系的设计。以齿轮齿条转向器的设计为中心,一是汽车总体构架参数对汽车转向的影响;二是机械转向器的选择;三是齿轮和齿条的合理匹配,以满足转向器的正确传动比和强度要求;四是动力转向机构设计;五是梯形结构设计。因此本课题在考虑上述要求和因素的基础上研究利用转向盘的旋转带动传动机构的齿轮齿条转向轴转向,通过万向节带动转向齿轮轴旋转,转向齿轮轴与转向齿条啮合,从而促使转向齿条直线运动,实现转向。实现了转向器结构简单紧凑,轴向尺寸短,且零件数目少的优点又能增加助力,从而实现了汽车转向的稳定性和灵敏性。在本文中主要进行了转向器齿轮齿条的设计和对转向齿轮轴的校核,主要方法和理论采用汽车设计的经验参数和大学所学机械设计的课程内容进行设计,其结果满足强度要求,安全可靠。 关键词:转向系;机械型转向器;齿轮齿条;液压式助力转向器 Abstract The title of this topic is the design of steering system. Rack and pinion steering gear to the design as the center, one vehicle parameters on the overall framework of the impact of vehicle steering; Second, the choice of mechanical steering; third rack gear and a reasonable match to meet the correct steering gear ratio and strength requirements; Fourth, power steering mechanism design; Fifth, the structural design of trapezoidal. Therefore, taking into account the above issues and factors that require study, based on the steering wheel rotary drive transmission shaft of the steering rack and pinion steering, through the universal joint drive shaft rotation gear shift, steering rack and steering gear shaft meshing, thereby encouraging steering rack linear motion to achieve steering. Simple structure to achieve the steering tight, short axial dimension, and the number of parts can increase the advantages of less power in order to achieve the vehicle steering stability and sensitivity. In this article a major design steering rack and pinion steering gear shaft and the check, the main methods and theoretical experience in the use of automotive design parameters and the University of mechanical design school curriculum design and the results meet the strength
基于单片机的智能寻迹小车毕业设计
基于单片机的智能寻迹小车毕业设计 系统主要由红外避障模块、声控模块、光电寻迹、电机驱动及语音播报模块组成。 采用P89V51单片机作为智能小车控制核心。系统能实现对线路进行寻迹,小 车可以 前进或后退,遇到障碍物可以自行停止并可以实现反向运行,系统可以利用声 音控 制小车的启停。整个系统小巧紧凑,控制准确,性价比高,人机互动性好。 P89V51单片机;红外避障;线路寻迹;直流减速电机 ABSTRACT System is mainly by infrared obstacle avoidance module, voice module, opto-electronics and motor drive tracing module. Used as a single- chip smart car P89V51 control core. System can realize the tracing lines, cars can go forward or backward, encountered obstacles can stop and reverse operation can be achieved, the system can use voice to control the start and stop car. Compact the entire system to control the accurate, cost-effective, good human-computer interaction. KEYWORD: P89V51MCU;Infrared obstacle avoidance;Tracing;DC motor speed 1
转向系统设计
标题 转向系统设计与优化 摘要 汽车在行驶过程中,需要按照驾驶员的意志经常改变行驶方向,即所谓汽车转向。用来改变或保持汽车行驶方向的机构称为汽车转向系统。汽车转向系统的功能就是按照驾驶员的意愿控制汽车的行驶方向。汽车转向系统对汽车的行驶安全是至关重要的。因此需要对转向系统进行优化,从而使汽车操作起来更加方便、安全。本次设计是EPS电动转向系统,即电动助力转向系统。该系统是由一个机械系统和一个电控的电动马达结合在一起而形成的一个动力转向系统。EPS系统主要是由扭矩传感器、电动机、电磁离合器、减速机构和电子控制单元等组成。驾驶员在操纵方向盘进行转向时,转矩传感器检测到转向盘的转向以及转矩的大小,将电压信号输送到电子控制单元,电子控制单元根据转矩传感器检测到的转距电压信号、转动方向和车速信号等,向电动机控制器发出指令,使电动机输出相应大小和方向的转向助力转矩,从而产生辅助动力。汽车不转向时,电子控制单元不向电动机控制器发出指令,电动机不工作。该系统由电动助力机直接提供转向助力,省去了液压动力转向系统所必需的动力转向油泵、软管、液压油、传送带和装于发动机上的皮带轮,既节省能量,又保护了环境。另外,还具有调整简单、装配灵活以及在多种状况下都能提供转向助力的特点。因此,电动助力转向系统是汽车转向系统的发展方向。 关键词:机械系统,扭矩传感器,电动机,电磁离合器,减速机构,电子控制单元。 概述 汽车在行使过程中,需要经常改变行驶方向,即所谓的转向。这就需要有一套能够按照司机意志来改变或恢复汽车行驶方向的专设机构,它将司机转动方向盘的动作转变为车轮的偏转动作,这就是所谓的转向系统。转向系统是用来改变汽车的行使方向和保持汽车直线行使的机构,既要保持车辆沿直线
汽车现代设计理论与方法
汽车现代设计理论与方法试题答案 1、用结构框图表示并行工程的一般步骤,列出每一步中涉及到的关键技术。 (1)并行工程的产品开发工程: (2)并行工程的运行模式: (3)并行工程(CE)的关键技术: ①多功能集成产品开发团队; ②产品开发的过程建模; ③产品生命周期数字化建模; ④产品数字管理; ⑤质量功能配置; ⑥面向X的设计; ⑦并行工程集成框架。
2、简述动态设计包括的主要内容,动态设计过程采用的建模方式是什么? 主要内容: 所谓“动态设计”是指机械结构和机器系统的动态性能在其图纸的设计阶段就应得到充分考虑,整个设计过程实质上是运用动态分析技术、借助计算机分析、计算机辅助设计和仿真来实现的,达到缩短设计周期、提高设计效率和设计水平的目的。 机械系统的动态特性是指机械系统本身的固有频率、阻尼特性和对应于各阶固有频率的振型以及机械在动载荷作用下的响应。 机械系统动态设计的主要包括两个方面: 1)建立一个切合实际的机械系统动态力学模型,从而为进行机械系统动态力学特性分析提供条件; 2)选择有效的机械系统动态优化设计方法,以获得一个具有良好的机械系统动态性能的产品结构设计方案。 机械系统的建模方法分为两大类:理论建模法、实验建模法。 (1) 理论建模法按机械系统不同而采用不同的技巧,因而有多种方法(一般主要采用有限元方法和传递矩阵法); (2)实验建模法是指对机械系统(实物或模型)进行激振(输入),通过测量与计算获得表达机械系统动态特性的参数(输出),再利用这些动态特性参数,经过分析与处理建立系统的数。 3、什么是稳健设计?稳健设计中主要涉及了哪些模型和方法? 稳健性设计 ①起源:这种新的设计概念认为:使用最昂贵的高等级、一致性最好的元器件并不一定能组装出稳健性最好的整机,成本最高,并不一定质量最好。产品抗干扰能力的强弱主要取决于各种设计参数(因素)的搭配。设计参数搭配不同,输出性能的波动大小不同,平均值也不同。 ②目的:稳健设计的目的在于,使所设计的产品质量稳定、波动小,使生产过程对各种噪声不敏感。在产品设计过程中,利用质量、成本、效益的函数关系,在低成本的条件下开发出高质量的产品。 ③设计思想:把产品的稳健性设计到产品和制造过程中,通过控制源头质量来抵御大量的下游生产或顾客使用中的噪声或不可控因素的干扰。 数学模型或方法: 稳健性设计包括三个阶段:解决问题、解决方案、应用价值。系统设计是基础,参数设计是核心,容差设计是为满足其经济性。 其中主要采用正交表及统计等模型方法。例如:
智能小车寻迹论文
绪论 在当前的这个环境,随着不断进步的生产技术,各个企业对自动化技术的要求也是越来越高。智能车辆或者与智能车辆相关的产品已经开始成为各种自动化系统的关键设备,这其中主要包括了物流、运输等系统。所以,智能车辆被越来越多的人们所关注,同时,也有越来越多的国家开始对智能车辆的开发和设计进行积极的研究。 智能小车是一个典型的高科技综合系统。智能小车包含了多种高新科技的系统,而这些系统又运用了更多的高新技术,其中包括了对环境的探测、传感,对运行路线的决策、计算,以及信息通讯和自动控制行驶等多种功能。简单的来讲,智能小车就是将双腿变成了的多个轮子的移动机器人。所以,智能小车在机械和电路的设计方面,都要比其他智能机器人的运行也更稳定,也更加简单。另外,由于智能小车的优点就在于控制简便,运行稳定,所以对智能小车的行驶的速度与方向之间的配合就有比较严格的要求。首先,小车可以通过传感器来获取当前道路状况,然后将传感器获取到的数据传输到处理器,处理器再结合小车当前的行驶状态,迅速地进行计算,对小车的行驶的方向和行车的速度进行快速的调整改变,进而对目标道路进行迅速准确的跟踪。 1.开发概述 1.1 研究现状 移动机器人出现于20世纪06年代,当时斯坦福研究院(SRI)的Nils Nilssen和charles Rosen等人,在1966年至1972年中研制出了取名shakey的自主式移动机器人,目的是将人工智能技术应用在复杂环境下,完成机器人系统的自主推理、规划和控制[1]。从此,移动机器人作为机器人学中的一个重要分支,从无到有,数量开始不断的增多。 在目前的环境下,由于企业的生产技术在不断进步,对自动化技术的要求也在一直的加深,在未来工业生产和日常生活中,智能小车系统将会扮演重要的角色,智能小车将会在人们的视野中出现地越来越频繁。 1.2 选题意义 随着科技的不断发展,人们也越发的开始关注一些研发人工智能产品的情况。智能小车可以在各种条件恶劣的情况下代替人们进行一些复杂的任务,例如排雷防爆,矿区检测,狭窄的地方进行货物搬运等。正是由于这种智能小车设备有非常多的运用前景,所以对智能小车的进行寻迹避障的研究设计就是目前首要的目标,因为小车需要正确的在规定的路线中行进并执行相应的任务。
汽车转向系统EPS设计毕业论文
汽车转向系统EPS设计毕业论文 目录 1 引言 (1) 1.1汽车转向系统简介 (1) 1.2汽车转向系统的设计思路 (3) 1.3 EPS的研究意义 (4) 2 EPS控制装置的硬件分析 (5) 2.1汽车电助力转向系统的机理以及类别 (5) 2.2 电助力转向机构的主要元件 (8) 3 电助力转向系统的设计 (11) 3.1 动力转向机构的性能要求 (11) 3.2 齿轮齿条转向器的设计计算 (11) 3.3 转向横拉杆的运动分析[9] (21) 3.4 转向器传动受力分析 (22) 4 转向传动机构优化设计 (24) 4.1传动机构的结构与装配 (24) 4.2 利用解析法求解出外轮转角的关系 (25) 4.3 建立目标函数 (27) 5 控制系统设计 (29) 5.1 电助力转向系统的助力特性 (29) 5.2 EPS电助力电动机的选择 (30)
本科毕业设计(论文) 5.3 控制系统框图设计 (31) 结论 (32) 致谢 (34) 参考文献 (35)
1 引言 1.1汽车转向系统简介 汽车转向系统,顾名思义是为了能够使车辆按照驾驶员的意愿向左或者向右转弯或者直线行驶。转向装置有很多种,也一直在经历一个循序渐进不断更新不断创新的过程。从发明家本茨发明汽车的初期,转向系统知识最简单的形式来转向,其机构为单纯的扶把式,没有助力,所以笨重,费力,以及行驶状态不稳定。从在原始的雏形开始,各国人士不断创新改革,到现在为止,汽车转向系统的应用按先后顺序可以分为:机械转向装置、液压助力转向装置、电子控液压助力转向系统、电助力转向系统、四轮转向系统、主动前轮转向系统和线控转向系统[1]目前市场大部分中低档轿车采用的液压式转向器,当然电控的也很常见,所以在该种系统的转向器技术的发展如今已经遇到了瓶颈。随着人们对乘车舒适,节能,安全,稳定的期望,电控液压式转向系统逐渐取代了先前的版本,但随着科技的进步,越来越多的科学家期待有路感的转向系统问世,所以流量阀式液压助力转向器出现了,在不同车速下,驾驶员手握方向盘,感觉到了路感的存在,助力特性曲线描述的就是“路感”,但是美中不足的是这种液压式转向器依然存在很多缺陷,电机,液压泵,转向器,流量阀等等转向器在发动机旁的布置问题又出现了,还有就是液压油的泄漏问题越来越的突出尖锐。电助力EPS (Electronic Power steering system)是在纯机械转向机构的前提下,设计加装了扭矩和车速等信号传感器、电子控制单元和转向助力装置等[2]。所以电助力式转向器弥补了上述的不足,而且节能环保,易于线性控制,所以现在很多研究人员把目光转向了电助力式转向机,瞬时其成为了国际汽车工业转向系统新的研究主题,且这种系统也正在慢慢实现整车量产状态。
智能循迹小车设计论文
摘要: 循迹小车采用传感器来识别白色路面中央的黑色引导线,通过C8051F310 单片机实现对转向舵机和驱动电机的PWM控制,利用检测器检测道路上的标志,使小车实现快速稳定地循线行驶。分模块阐述了循迹小车的原理、软硬件设计及制作过程.针对路径特点对循迹小车的方向控制和速度控制提出了舵机分级转向、速度分段控制的解决方案。实验表明,循迹小车能够较快速、平稳地完成对各种曲率引导线的循迹行驶任务。 关键词: 单片机、电机、传感器、循迹。 Summary: Tracing car photoelectric sensor to identify the white road to guide the central black line through the C8051F310 microcontroller and drive to achieve the steering servo motor PWM control, the use of detector on the road signs to make the car look fast and stable line-line, down. Sub-module describes the principles of tracing the car, hardware and software design and production process.Path tracing for the characteristics of the car’s direction and speed control servo proposed classification steering, speed control sub-solutions. Experiments show that, tracing the car can be more rapid and smooth completion of the guide line of curvature of the driving task of tracing. Keywords: Microcontroller, motors, sensors, tracing.
毕业设计+智能循迹避障小车设计
单片机系统课程设计轮式移动机器人的设计 学院:通信与电子工程学院 班级:电子131 姓名:初清晨 学号: 2013131013 同组成员:孟庆阳张轩 指导老师:王艳春 日期: 2015年12月24日
组员分工 1、组长:张轩,实物焊接,报告整理,程序设计 2、组员:孟庆阳,实物焊接,仿真测试,报告整理 3、组员:初清晨,实物焊接,报告整理,仿真测试
目录 摘要 (1) 第一章绪论 (2) 1.1智能小车的意义和作用 (2) 1.2智能小车的现状 (3) 第二章方案设计与论证 (3) 2.1 主控系统 (3) 2.2 电机驱动模块 (4) 2.3 循迹模块 (5) 2.4 避障模块 (6) 2.5 机械系统 (7) 2.6电源模块 (7) 第三章硬件设计 (7) 3.1 AT89S52单片机的简介 (8) 3.2总体设计 (11) 3.3驱动电路 (12) 3.4信号检测模块 (13) 3.5主控电路 (14) 第四章软件设计 (15) 4.1主程序框图 (15) 4.2电机驱动程序 (15) 4.3循迹模块 (16) 4.4避障模块 (20) 结束语 (25) 致谢 (26) 附录一循迹加红外避障综合程序 (28) 附录二实物图 (32)
摘要 随着计算机、微电子、信息技术的快速进步,智能化技术的开发速度越来越快,智能度越来越高,应用范围也得到了极大的扩展。智能作为现代的新发明,是以后的发展方向,它可以按照预先设定的模式在一个环境里自动的运作,不需要人为的管理,可应用于科学勘探等用途。智能电动小车就是其中的一个体现。设计者可以通过软件编程实现它的行进、循迹、停止的精确控制以及检测数据的存储、显示,无需人工干预。因此,智能电动小车具有再编程的特性,是机器人的一种。 本设计采用AT89S52单片机加电机驱动电路和红外遥控及循迹模块还有红外接收一体化传感器设计而成,采用模块化的设计方案,运用红外遥控器控制小车的前进、后退、左转、右转、启动和停止。 关键词:智能小车;STC89C52单片机;L9110;红外对管 Intelligent tracking and obstacle-avoid car Abstract:Based infrared detection of black lines and the road obstacles, and use a STC89C52 MCU as the controlling core for the speed and direction, A electronic drived, which can automatic track and avoid the obstacle, was designed and fabricated. In which, the car is drived by the L298N circuit, its speed is controlled by the output PWM signal from the STC89C52. Keywords: Smart Car; STC89C52 MCU; L298N; Infrared Emitting Diode
汽车设计第七章 测验题
第七章测验题(一) 一、名词解释(每题10分,共30分) 1、转向器的正效率 2、转向器的力传动比 3、转向系角传动比 二、选择题(每题10分,共30分) 1、变传动比的齿轮齿条式转向器从中部向两端传动比逐渐变大,则()。(A)齿条模数减小,压力角增大 (B)齿条模数增大,压力角减小 (C)齿条模数、压力角都增大 (D)齿条模数、压力角都减小 2、循环球式转向器螺杆导程角增加,则()。 (A)正、逆效率均减小 (B)正、逆效率均增大 (C)正效率增大、逆效率减小 (D)正效率减小、逆效率增大 3、转向器的角传动比增大,则力传动比()。 (A)也随之增加 (B)也随之减小 (C)先增加再减小 (D)先减小再增加 三、问答题(共40分) 1、什么是转向器传动间隙特性?其变化特点是什么?为什么?(10分)
2、与其它形式转向器比较,齿轮齿条式转向器的主要优点是什么?(10分) 3、试解释为什么普通转向器存在“轻”和“灵”的矛盾?(20分)
第七章测验题(一)参考答案 一、名词解释(每题10分,共30分) 1、转向器的正效率 功率从转向器的转向轴输入,经转向摇臂轴输出所求得的效率称为正效率。 2、转向器的力传动比 从轮胎接地面中心作用在两个转向轮上的合力2Fw与作用在转向盘上的手力Fh之比,称为力传动比ip,即ip =2Fw/ Fh。 3、转向系角传动比 转向盘角速度与同侧转向节偏转角速度之比称为转向系角传动比。 二、选择题(每题10分,共30分) 1、 D 2、 B 3、 A 三、问答题(共40分) 1、什么是转向器传动间隙特性?其变化特点是什么?为什么?(10分) 答: 传动间隙是指各种转向器中传动副之间的间隙。该间隙随转向盘转角的大小不同而改变,并把这种变化关系称为转向器传动副传动间隙特性。 传动副的传动间隙特性应当设计成中间小,离开中间位置以后逐渐加大的形状。 这样既可以保证汽车直线行驶稳定性,还可以保证磨损后调整时,转向器无卡住现象。 2、与其它形式转向器比较,齿轮齿条式转向器的主要优点是什么?(10分) 答: 1、结构简单、紧凑,制造成本低; 2、传动效率高;
汽车设计转向系统
第一节概述 转向系是用来保持或者改变汽车行驶方向的机构,在汽车转向行驶时,保证各转向轮之间有协调的转角关系。 机械转向系依靠驾驶员的手力转动转向盘,经转向器和转向传动机构使转向轮偏转。有些汽车还装有防伤机构和转向减振器。采用动力转向的汽车还装有动力系统,并借助此系统来减轻驾驶员的手力。 对转向系提出的要求有: 1)汽车转弯行驶时,全部车轮应绕瞬时转向中心旋转,任何车轮不应有侧滑。不满足这项要求会加速轮胎磨损,并降低汽车的行驶稳定性。 2)汽车转向行驶后,在驾驶员松开转向盘的条件下,转向轮能自动返回到直线行驶位置,并稳定行驶。 3)汽车在任何行驶状态下,转向轮不得产生自振,转向盘没有摆动。 4)转向传动机构和悬架导向装置共同工作时,由于运动不协调使车轮产生的摆动应最小。 5)保证汽车有较高的机动性,具有迅速和小转弯行驶能力。 6)操纵轻便。 7)转向轮碰撞到障碍物以后,传给转向盘的反冲力要尽可能小。 8)转向器和转向传动机构的球头处,有消除因磨损而产生间隙的调整机构。 9)在车祸中,当转向轴和转向盘由于车架或车身变形而共同后移时,转向系应有能使驾驶员免遭或减轻伤害的防伤装置。 10)进行运动校核,保证转向盘与转向轮转动方向一致。 正确设计转向梯形机构,可以使第一项要求得到保证。转向系中设置有转向减振器时,能够防止转向轮产生自振,同时又能使传到转向盘上的反冲力明显降低。为了使汽车具有良好的机动性能,必须使转向轮有尽可能大的转角,并要达到按前外轮车轮轨迹计算,其最小转弯半径能达到汽车轴距的2~2.5倍。通常用转向时驾驶员作用·在转向盘上的切向力大小和转向盘转动圈数多少两项指标来评价操纵轻便性。没有装置动力转向的轿车,在行驶中转向,此力应为50—100N;有动力转向时,此力在20—50N。当货车从直线行驶状态,以10km /h速度在柏油或水泥的水平路段上转入沿半径为12m的圆周行驶,且路面干燥,若转向系内没有装动力转向器,上述切向力不得超过250N;有动力转向器时,不得超过120N。轿车转向盘从中间位置转到每一端的圈数不得超过2.0圈,货车则要求不超过3.0圈。·近年来,电动、电控动力转向器已得到较快发展,不久的将来可以转入商品装车使用。电控动力转向可以实现在各种行驶条件下转动转向盘的力都轻便。
转向设计
课程设计设计(论文)题目:轿车转向器设计
轿车转向系设计任务书 整车性能参数 驱动形式2 4 前轮轴距2471mm 轮距(前/后)1429mm/1422mm装备质量1060kg 60% 最高车速180km/h 空载时前轴分配 负荷 最大爬坡度35% 制动距离(初速 5.6m 30km/h) 最小转向直径11m最大功率/转速74kW/5800rpm 最大转矩/转速150N·m/4000rpm 变速器五档手动 基本要求: 1) 汽车转向行驶时,全部车轮绕瞬时转向中心转动。 2) 操纵轻便,方向盘手作用力小于200N。 3) 转向系角传动比15~20;正效率高于60%,逆效率高于50%。 4) 转向灵敏。 5) 转向器与转向传动装置有间隙调整机构。 6) 转向系应有能使驾驶员免遭或减轻伤害的防伤装置。 设计任务: 1) 查阅资料选定转向器,对转向系统进行方案设计。 2) 采用液压动力转向结构,并进行设计计算。 3) 设计转向梯形,确定梯形结构参数。 4) 利用图解法对梯形的特性进行校核。 5) 编写设计说明书。
目录 一、绪论 (1) 二、转向器设计 (2) (一)、转向系方案的选择 (2) (二)、转向系主要参数的确定 (5) (三)、液压动力转向设计 (9) (四)、转向梯形机构的设计 (12) (五)、总结 (15) 三、结束语 (16)
一、绪论 转向系统是汽车底盘的重要组成部分,转向系统性能的好坏直接影响到汽车行驶的安全性、操纵稳定性和驾驶舒适性,它对于确保车辆的行驶安全、减少交通事故以及保护驾驶员的人身安全、改善驾驶员的工作条件起着重要作用。随着现代汽车技术的迅速发展,汽车转向系统已从纯机械式转向系统、液压助力转向系(HPS)、电控液压助力转向系统(EHPS),发展到利用现代电子和控制技术的电动助力转向系统(EPS)及线控转向系统(SBW)。 液压转向系统是由液压和机械等两部分组成,它是以液压油做动力传递介质,通过液压泵产生动力来推动机械转向器,从而实现转向。液压助力转向系统一般由机械转向器、液压泵、油管、分配阀、动力缸、溢流阀和限压阀、油缸等部件组成。为确保系统安全,在液压泵上装有限压阀和溢流阀。其分配阀、转向器和动力缸置于一个整体,分配阀和主动齿轮轴装在一起(阀芯与齿轮轴垂直布置),阀芯上有控制槽,阀芯通过转向轴上的拨叉拨动。转向轴用销钉与阀中的弹性扭杆相接,该扭杆起到阀的中心定位作用。在齿条的一端装有活塞,并位于动力缸之中,齿条左端与转向横拉杆相接。转向盘转动时,转向轴(连主动齿轮轴)带动阀芯相对滑套运动,使油液通道发生变化,液压油从油泵排出,经控制阀流向动力缸的一侧,推动活塞带动齿条运动,通过横拉杆使车轮偏转而转向。 液压助力转向系统是在驾驶员的控制下,借助于汽车发动机带动液压泵产生的压力来实现车轮转向。由于液压转向可以减少驾驶员手动转向力矩,从而改善了汽车的转向轻便性和操纵稳定性。为保证汽车原地转向或者低速转向时的轻便性,液压泵的排量是以发动机怠速时的流量来确定。汽车起动之后,无论车子是否转向,系统都要处于工作状态,而且在大转向车速较低时,需要液压泵输出更大的功率以获得比较大的助力,所以在一定程度上浪费了发动机动力资源。并且转向系统还存在低温工作性能差等缺点。