中南大学近代物理实验报告-原子力显微镜实验报告
近代物理实验实验报告
实验名称:原子力显微镜
所在学院:物理与电子学院
专业班级:物理升华班1301
学生姓名:黄佳清
学生学号:0801130117
指导教师:黄迪辉
一、目的要求
(1) 了解原子力显微镜的工作原理。
(2) 初步掌握用原子力显微镜进行表面观测的方法。
二、实验原理
1.基本原理
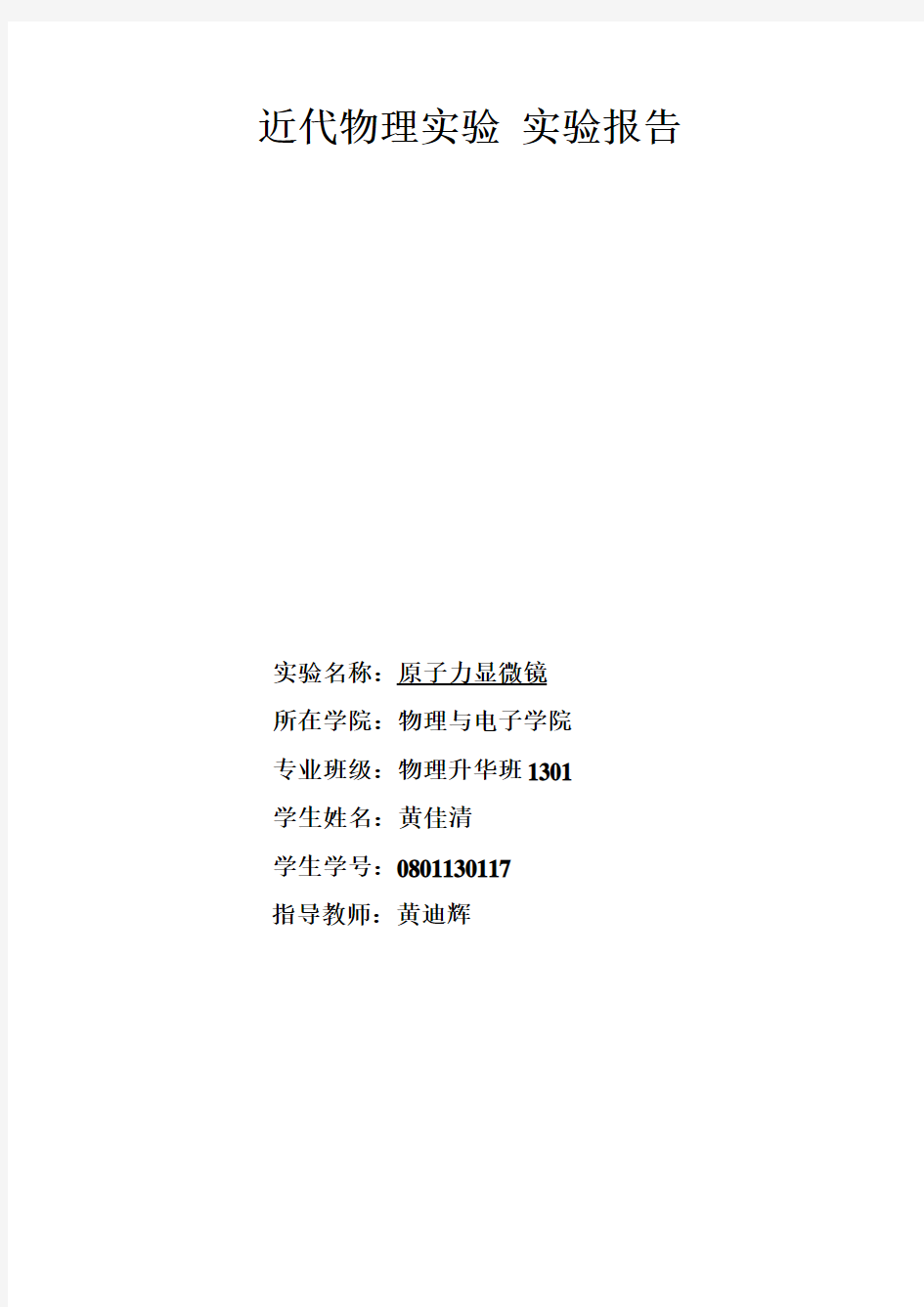
AFM是利用一个对力敏感的探针针尖与样品之间的相互作用力来实现表面成像的,工作原理如图1所示。将一个对微弱力极敏感的弹性微悬臂一端固定,另一端有一微小的针尖,针尖与样品的表面轻轻接触,由于针尖尖端原子与样品表面原子间存在极微弱的作用力(10-8~10-6 N),微悬臂会发生微小的弹性形变。针尖和样品之间的力F与微悬臂的形变△z 之间遵循胡克定律(Hooke Law)
F = k·△z
其中,k为微悬臂的力常数。测定微悬臂形变量的大小,就可以获得针尖与样品之间作用力的大小。针尖与样品之间的作用力与距离有着强烈的依赖关系,所以在扫描过程中利用反馈回路保持针尖和样品之间的作用力恒定,即保持微悬臂的形变量不变,针尖就会随表面的起伏上下移动。记录针尖上下运动的轨迹即可得到样品表面形貌的信息。这种检测方式被称为“恒力”模式(Constant Force Mode),是AFM使用最广泛的扫描方式。
AFM的图像也可以使用“恒高”模式(Constant Height Mode)来获得,也就是在x、y扫描过程中,不使用反馈回路,保持针尖与参考水平面之间的距离恒定,检测器直接测量微悬臂z 方向的形变量来成像。这种方式由于不使用反馈回路,可以采用更高的扫描速度,通常在观察原子、分子像时用得比较多,而对于表面起伏较大的样品不适合。
图1 AFM原理示意图
2. AFM的工作模式
当AFM的针尖与样品表面原子相互作用时,通常有几种力同时作用于微悬臂,其中最主要的是范德瓦尔斯力(Van der Waals forces)。针尖与样品表面原于间的范德瓦尔斯力与距离关系曲线如图2所示。当针尖与样品表面原子相互靠近时,它们先互相吸引,随着两者间距继续减小,两者之间的排斥力将开始抵消吸引力,直到间距为几个埃时,两个力达到平衡。间距更小时,两者之间以排斥力为主。如果让针尖与样品处于不同的间距,则可使AFM处于不同的工作模式。AFM的工作模式主要有接触模式(Contact Mode)、非接触模式(Non-Contact Mode)和轻敲模式(Tapping Mode)。根据样品表面不同的结构特征和材料的特性以及不同的研究需要,选择合适的工作模式。
图2 针尖与样品表面原子间的范德瓦尔斯力与距离关系曲线
三,仪器
本实验选用的仪器是Solver P47型多模式扫描探针显微镜。样品相对于探针的横向扫描,由计算机通过D/A接口控制扫描电路实现,在扫描过程中,为使探针与样品保持一定的纵向间距,引入了反馈控制电路系统。
图12 Solver P47型多模式扫描探针显微镜
在恒力模式下:光电与计算机软硬件系统,将扫描得到与样品形貌对应的反射光点的位置信号,转变成电流信号,再经电流—电压转换、前置放大、加减、乘除等模拟运算,通过A/D接口输入计算机。计算机根据取得的信号大小,通过D/A接口输出相应的反馈信号,控制步进马达的Z向运动,从而控制样品与针尖之间的间距,使之保持恒定,即保持原子力大小不变。根据Z向运动的变化情况,可以最终获得样品表面的三维微观形貌。
系统软件分为两部分:图像扫描部分和图像处理部分。图像扫描部分,软件可对扫描速度、反馈增益等进行实时调整。扫描获得的图像可在显示框内实时地重复显示。在图像处理部分,可将图像作平面显示、三维立体显示,实现图像的着色、平滑、裁剪等处理。在获得被测样品的AFM图像后,用鼠标在图像中拾取一区域,计算机将读取该区城内所有的信息点,并根据面粗糙度公式计算该区域的Ra、Rq值,从而获得相应区域的微观几何尺寸。
四,数据表格及数据处理
1实验图像
表面2D图
表面3D图1实验数据及其统计
中南大学通信原理实验报告(截图完整)
中南大学 《通信原理》实验报告 学生姓名 指导教师 学院 专业班级 完成时间
数字基带信号 1、实验名称 数字基带信号 2、实验目的 (1)了解单极性码、双极性码、归零码、不归零码等基带信号波形特点。 (2)掌握AMI、HDB 3 码的编码规则。 (3)掌握从HDB 3 码信号中提取位同步信号的方法。 (4)掌握集中插入帧同步码时分复用信号的帧结构特点。 (5)了解HDB 3 (AMI)编译码集成电路CD22103。 3、实验内容 (1)用示波器观察单极性非归零码(NRZ)、传号交替反转码(AMI)、三阶高密度双极性码 (HDB 3)、整流后的AMI码及整流后的HDB 3 码。 (2)用示波器观察从HDB 3 码中和从AMI码中提取位同步信号的电路中有关波形。 (3)用示波器观察HDB 3 、AMI译码输出波形。 4、基本原理(简写) 本实验使用数字信源模块和HDB 3 编译码模块。 1、数字信源 本模块是整个实验系统的发终端,模块内部只使用+5V电压,其原理方框图如图1-1所示,电原理图如图1-3所示(见附录)。本单元产生NRZ信号,信号码速率约为170.5KB,帧结构如图1-2所示。帧长为24位,其中首位无定义,第2位到第8位是帧同步码(7位巴克码1110010),另外16位为2路数据信号,每路8位。此NRZ信号为集中插入帧同步码时分复用信号,实验电路中数据码用红色发光二极管指示,帧同步码及无定义位用绿色发光二极管指示。发光二极管亮状态表示1码,熄状态表示0码。 本模块有以下测试点及输入输出点: ? CLK 晶振信号测试点 ? BS-OUT 信源位同步信号输出点/测试点(2个) ? FS 信源帧同步信号输出点/测试点 ? NRZ-OUT(AK) NRZ信号(绝对码)输出点/测试点(4个) 图1-1中各单元与电路板上元器件对应关系如下: ?晶振CRY:晶体;U1:反相器7404 ?分频器U2:计数器74161;U3:计数器74193;U4:计数器40160 ?并行码产生器K1、K2、K3:8位手动开关,从左到右依次与帧同步码、数
原子力显微镜实验报告
原子力显微镜实验报告 原子力显微镜应用技术 一、实验目的 1了解原子力显微镜的工作原理 2掌握用原子力显微镜进行表面观测的方法 二、实验原理 (1)AFM的工作原理 在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、 反馈系统。主要工作原理如下图:
原子力显微镜的工作原理图 (2)A FM的工作模式 AFM有三种不同的工作模式:接触模式(contact mode) 、非接触模式 (noncontact mode) 和共振模式或轻敲模式(Tapping Mode) 本实验采用轻敲模式:样品扫描时,针尖始终同样品“接触”,即针尖-样品距离在小于零点几个纳米的斥力区域。此模式通常产生稳定、高分辨图像。当沿着样品扫描时,由于表面的高低起伏使得针尖-样品距离发生变化,引起它们之间作用力的变化,从而使悬臂形变发生改变。当激光束照射到微悬臂的背面,再反射到位置灵敏的光电检测器时,检测器不同象限会接收到同悬臂形变量成一定的比例关系的激光强度差值。反馈回路根据检测器的信号与预置值的差值,不断调整针尖一样品距离,并且保持针尖一样品作用力不变,就可以得到表面形貌像。 三、实验仪器及试剂 试剂及材料:石墨烯溶液,云母片
仪器:nano scope 5.31r 四、步骤 依次按下面步骤开启实验仪器: 1.开机:先开电脑再开主控制器 2.打开程序:Nanoscope: 3.安装样品:用双面胶带将云母片粘到圆形铁片上,再将其放置到样品 台上。调节中部拨钮UP控制样品台降低到样品上表面低于样品台两侧的圆球。 4.安装探针:用镊子小心将探针安装到HOLDE中。 5.安装HOLDER调节样品台后面的旋钮,把HOLDE固定紧; 调节拨钮DOW使样品台尽量接近探针针尖; 将激光调至针尖处,同时屏幕的SUM直最大;调节样品台后面横型旋钮,用于控制样品室中的反射镜子,调节旋钮使屏幕上的SUM直最大;调节样品台上面和后面的两个旋钮,使屏幕上VERT和HORZ匀为0左右;将光敏检测器旋至最小;将左边拨钮拨至 on ; 7.开始测试:控制面板左上: (1)T UNE:弹出对话框,点击下方Auto Tune自动调节,完成之后,点击Exit 退出。 (2)下针:弹出表单,表单消失后,自动开始扫描SCAN (3)Capture : Capture file name ,弹出对话框,对图像命名,并选择保 存路径。
中南大学通信电子线路实验报告
中南大学 《通信电子线路》实验报告 学院信息科学与工程学院 题目调制与解调实验 学号 专业班级 姓名 指导教师
实验一振幅调制器 一、实验目的: 1.掌握用集成模拟乘法器实现全载波调幅和抑止载波双边带调幅的方法。 2.研究已调波与调制信号及载波信号的关系。 3.掌握调幅系数测量与计算的方法。 4.通过实验对比全载波调幅和抑止载波双边带调幅的波形。 二、实验内容: 1.调测模拟乘法器MC1496正常工作时的静态值。 2.实现全载波调幅,改变调幅度,观察波形变化并计算调幅度。 3.实现抑止载波的双边带调幅波。 三、基本原理 幅度调制就是载波的振幅(包络)受调制信号的控制作周期性的变化。变化的周期与调制信号周期相同。即振幅变化与调制信号的振幅成正比。通常称高频信号为载波信号。本实验中载波是由晶体振荡产生的10MHZ高频信号。1KHZ的低频信号为调制信号。振幅调制器即为产生调幅信号的装置。 在本实验中采用集成模拟乘法器MC1496来完成调幅作用,图2-1为1496芯片内部电路图,它是一个四象限模拟乘法器的基本电路,电路采用了两组差动对由V1-V4组成,以反极性方式相连接,而且两组差分对的恒流源又组成一对差分电路,即V5与V6,因此恒流源的控制电压可正可负,以此实现了四象限工作。D、V7、V8为差动放大器V5与V6的恒流源。进行调幅时,载波信号加在V1-V4的输入端,即引脚的⑧、⑩之间;调制信号加在差动放大器V5、V6的输入端,即引脚的①、④之间,②、③脚外接1KΩ电位器,以扩大调制信号动态范围,已调制信号取自双差动放大器的两集电极(即引出脚⑹、⑿之间)输出。
图2-1 MC1496内部电路图 用1496集成电路构成的调幅器电路图如图2-2所示,图中VR8用来调节引出脚①、④之间的平衡,VR7用来调节⑤脚的偏置。器件采用双电源供电方式(+12V,-9V),电阻R29、R30、R31、R32、R52为器件提供静态偏置电压,保证器件内部的各个晶体管工作在放大状态。 四、实验结果 1. ZD.OUT波形: 2. TZXH波形:
中南大学物化课后习题标准答案-10章-电极过程
第10章电极过程 1.用间接方法求得298.15K H 2+?O 2 ==== H 2O (l ) =-236.65 kJ ·mol -1 试问298.15K 时,非常稀的硫酸溶液的分解电压是多少?设用的是可逆电极,并 (答案:1.226V ) 解: ∵ = - zFE Θ ∴ U 分 = E 理 = E Θ= 2.298.15K 时低电流密度电解稀硫酸水溶液,用银作两极的电极材料,和用光滑铂作两极材料,试分别确定其分解电压(已知在银电极上ηH2=0.87 ,ηO2=0.96V ,在光滑铂电极上ηH2=0.09,ηO2=0.45V 。并设稀硫酸水溶液中a H2O =1)。 (答案:3.059V ;1.769V ) 解: 电解稀硫酸水溶液,就是电解水,其理论(可逆)分解电压为1.229, 考虑极化作用,则其实际分解电压 = 理论(可逆)分解电压 + ∑超电压,故, 用Ag 作电极: U 分 = 1.229 + 0.87 + 0.96 = 3.059 V 用Pt 作电极: U 分 = 1.229 + 0.09 + 0.45 = 1.769 V 3.某溶液中含10-2mol ·dm -3 CdSO 4,10-2mol ·dm -3 ZnSO4和0.5mol ·dm -3H 2SO 4,把该溶液放在两个铂电极之间,用低电流密度进行电解,同时均匀搅拌,
①哪一种金属将首先沉积在阴极上? ②当另一种金属开始沉积时,溶液中先析出的哪一种金属所剩余的浓 度为多少? (答案:6.65×10-15 mol·dm-3) 解:(1) 在此溶液中,,,而查表知: , ∴一定有:,故金属Cd先析出。 (2)在金属锌析出时Cd2+的浓度应满足关系: (-0.4026) + 0.02958 lg c Cd2+ = (-0.7628) + 0.0296lg(0.01) 解得:c Cd2+ = 6.65×10-15 mol·dm-3 4.电解某溶液在阴极上有Zn沉积,H 在Zn上的超电压为0.72V,欲使溶液中 2 气,溶液的pH值最小应控制为多Zn2+的浓度降到10-4mol·dm-3,阴极仍不析出H 2 少?(答案:2.7) 解:当c Zn2+= 1.0×10-4mol·dm-3时,有 时,有E H+/H2 = (-0.05916)×pH-0.72 析出H 2
扫描隧道显微镜实验报告
一、实验目的 1.采用探针扫描显微镜进行微纳米级表面形貌测量。 2.了解扫描探针显微镜的工作原理并熟悉原子力显微镜的操纵。 二、实验设备 原子力显微镜、光盘块、装有SPM Console在线控制软件和Image后处理软件的计算机。 三、实验基础 原子力显微镜(Atomic Force Microscope ,AFM),一种可用来研究包括绝缘体在内的固体材料表面结构的分析仪器。 原子力显微镜的基本原理是:将一个对微弱力极敏感的微悬臂一端固定,另一端有一微小的针尖,针尖与样品表面轻轻接触,由于针尖尖端原子与样品表面原子间存在极微弱的排斥力,通过在扫描时控制这种力的恒定,带有针尖的微悬臂将对应于针尖与样品表面原子间作用力的等位面而在垂直于样品的表面方向起伏运动。利用光学检测法或隧道电流检测法,可测得微悬臂对应于扫描各点的位置变化,从而可以获得样品表面形貌的信息。激光检测原子力显微镜(Atomic Force Microscope Employing Laser Beam Deflection for Force Detection, Laser-AFM)——扫描探针显微镜家族中最常用的一种为例,其工作原理如图1所示。二极管激光器(Laser Diode)发出的激光束经过光学系统聚焦在微悬臂(Cantilever)背面,并从微悬臂背面反射到由光电二极管构成的光斑位置检测器(Detector)。在样品扫描时,由于样品表面的原子与微悬臂探针尖端的原子间的相互作用力,微悬臂将随样品表面形貌而弯曲起伏,反射光束也将随之偏移,因而,通过光电二极管检测光斑位置的变化,就能获得被测样品表面形貌的信息。 在系统检测成像全过程中,探针和被测样品间的距离始终保持在纳米(10e-9米)量级,距离太大不能获得样品表面的信息,距离太小会损伤探针和被测样品,反馈回路(Feedback)的作用就是在工作过程中,由探针得到探针-样品相互作用的强度,来改变加在样品扫描器垂直方向的电压,从而使样品伸缩,调节探针和被测样品间的距离,反过来控制探针样品相互作用的强度,实现反馈控制。因此,
操作系统实验报告-中南大学
操作系统原理试验报告 班级: 学号: 姓名:
实验一:CPU调度 一、实验内容 选择一个调度算法,实现处理机调度。 二、实验目的 多道系统中,当就绪进程数大于处理机数时,须按照某种策略决定哪些进程优先占用处理机。本实验模拟实现处理机调度,以加深了解处理机调度的工作。 三、实验题目 1、设计一个按优先权调度算法实现处理机调度的程序; 2、设计按时间片轮转实现处理机调度的程序。 四、实验要求 PCB内容: 进程名/PID; 要求运行时间(单位时间); 优先权; 状态: PCB指针; 1、可随机输入若干进程,并按优先权排序; 2、从就绪队首选进程运行:优先权-1/要求运行时间-1 要求运行时间=0时,撤销该进程 3、重新排序,进行下轮调度 4、最好采用图形界面; 5、可随时增加进程; 6、规定道数,设置后备队列和挂起状态。若内存中进程少于规定道数,可自动从后备 队列调度一作业进入。被挂起进程入挂起队列,设置解挂功能用于将指定挂起进程解挂入就绪队列。 7、每次调度后,显示各进程状态。 实验二:内存管理 一、实验内容 主存储器空间的分配和回收 二、实验目的 帮助了解在不同的存储管理方式下,应怎样实现主存空间的分配和回收。 三、实验题目 在可变分区管理方式下,采用最先适应算法实现主存空间的分配和回收。
四、实验要求 1、自行假设主存空间大小,预设操作系统所占大小并构造未分分区表; 表目内容:起址、长度、状态(未分/空表目) 2、结合实验一,PCB增加为: {PID,要求运行时间,优先权,状态,所需主存大小,主存起始位置,PCB指针} 3、采用最先适应算法分配主存空间; 4、进程完成后,回收主存,并与相邻空闲分区合并 .1、Vo类说明(数据存储结构) 进程控制块PCB的结构: Public class PCB{ //进程控制块PCB,代表一个进程 //进程名,作为进程的标识; private String name; //要求运行时间,假设进程运行的单位时间数; private int time; //赋予进程的优先权,调度时总是选取优先数小的进程先执行; private int priority; //状态,假设有“就绪”状态(ready)、“运行”状态(running)、 //“后备”状态(waiting)、“挂起”状态(handup) private String state; //进程存放在table中的位置 private int start; //进程的大小 private int length; //进程是否进入内存,1为进入,0为未进入 private int isIn; //进程在内存中的起始位置 private int base; //进程的大小 private int limit; //一些get和set方法以及构造器省略… };
中南大学机械基础实验报告机类
机械基础实验报告 (机械类) 中南大学机械基础实验教学中心 2011年8月 目录 训练一机构运动简图测绘 (1) 实验二动平衡实验 (3) 实验三速度波动调节实验 (4) 实验四机构创意组合实验 (5) 实验五平面机构创新设计及运动测试分析实验 (6) 实验六螺栓联接静动态实验 (7) 实验七螺旋传动效率实验 (8) 实验八带传动实验 (9) 实验九液体动压轴承实验 (10) 实验十机械传动性能综合测试实验 (12) 实验十一滚动轴承综合性能测试分析实验 (13) 实验十二机械传动设计及多轴搭接实验 (14) 实验十三减速器拆装实验 (15)
训练一机构运动简图测绘 专业班级第组姓名成绩 1.一个正确的“机构运动简图”应能说明哪些内容?绘制机构运动简图的基本步骤是什么? 2.机构自由度与原动件的数目各为多少?当机构自由度=原动件的数目,机构的
运动是否确定? 五.收获与建议
实验二动平衡实验 专业班级第组姓名成绩一、实验目的: 二?设备名称: 三?实验数据 实验转速: 四.思考题: 转子动平衡为什么要在左右两个平面上进行平衡?
实验三速度波动调节实验专业班级第组姓名成绩一?实验目的: 二?设备名称: 三?实验数据 1?当转速不变时,采用不同的飞轮,数据记录: 结论:当转速不变时,飞轮转动惯量越大,则机构的速度波动越二?当飞轮不变时,转速变化,数据记录: 结论:当飞轮不变时,转速越大,则机构的速度波动越
实验四机构创意组合实验 专业班级第组姓名成绩 一、机构运动简图(要求符号规范标注参数) 二、机构的设计方案图(复印件) 三、机构有____________个活动构件?有______个低副,其中转动副_______个, 移动副__________个,有____________复合铰链,在_________处?有________处?有__________个虚约束,在__________处? 四、机构自由度数目为F=3n-2PL-PH=3X-2X-0= 五、机构有_________个原动件 在___________处用__________驱动,在__________处用___________驱动? 六、针对原设计要求,按照实验结果简述机构的有关杆件是否运动到位?曲柄是 否存在?是否实现急回特性?最小传动角数值?是否有“卡住”现象?(原无要求的项目可以不作涉及) 七、指出在机构中自己有所创新之处? 八、指出机构的设计存在的不足之处,简述进一步改进的设想?
AFM原子力显微镜技术及应用实验报告
AFM原子力显微镜技术及应用实验报告 ——指导老师:袁求理 近 代 物 理 实 验 报 告 物理班实验小组 2012年12月18日
引言 在当今的科学技术中,如何观察、测量、分析尺寸小于可见光波长的物体,是一个重要的研究方向。扫描隧道显微镜(STM) 使人们首次能够真正实时地观察到单个原子在物体表面的排列方式和与表面电子行为有关的物理、化学性质。 STM 要求样品表面能够导电,从而使得STM只能直接观察导体和半导体的表面结构。为了克服STM 的不足之处,推出了原子力显微镜(AFM)。AFM是通过探针与被测样品之间微弱的相互作用力(原子力) 来获得物质表面形貌的信息。因此,AFM除导电样品外,还能够观测非导电样品的表面结构,且不需要用导电薄膜覆盖,其应用领域将更为广阔。除物理,化学生物等领域外,AFM在为微电子,微机械学,新型材料,医学等领域有着广泛的应用,以STM和AFM为基础,衍生出一系列的扫描探针显微镜,有激光里显微镜,磁力显微镜,扫描探针显微镜主要用于对物质表面在纳米线上进行成像和分析。 一、实验组员: 邵孙国(10072127)、周柬辉(10072137)、陈俊峰(10072122)、任寿良(10072126)。 二、实验目的: Ⅰ、学习和了解AFM的结构和原理。 Ⅱ、掌握AFM的操作和调试过程,并以之来观察样品表面的形貌。 Ⅲ、学习用计算机软件来处理原始数据图像。 三、实验原理简析: 1. AFM基本原理 原子力显微镜的工作原理就是将探针装在一弹性微悬臂的一端,微悬臂的另一端固定,当探针在样品表面扫描时,探针与样品表面原子间的排斥力会使得微悬臂轻微变形,这样,微悬臂的轻微变形就可以作为探针和样品间排斥力的直接量度。一束激光经微悬臂的背面反射到光电检测器,可以精确测量微悬臂的微小变形,这样就实现了通过检测样品与探针之间的原子排斥力来反映样品表面形貌和其他表面结构。 在原子力显微镜的系统中,可分成三个部分:力检测部分、位置检测部分、反馈系统。如图一显示。
中南大学系统仿真实验报告
实验一MATLAB 中矩阵与多项式的基本运算 实验任务 1. 了解MATLAB命令窗口和程序文件的调用。 2 ?熟悉如下MATLAB的基本运算: ①矩阵的产生、数据的输入、相关元素的显示; ②矩阵的加法、乘法、左除、右除; ③特殊矩阵:单位矩阵、“ 1 ”矩阵、“0”矩阵、对角阵、随机矩阵的产生和运算; ④多项式的运算:多项式求根、多项式之间的乘除。 基本命令训练 1、>> eye(2) ans = 1 0 0 1 >> eye(4) ans = 1 0 0 0 0 1 0 0 0 0 1 0 0 0 0 1 2、>> ones(2) 1 1 ans =
1 1 >> ones(4) ans = 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 >> ones(2,2) ans = 1 1 1 1 >> ones(2,3) ans = 1 1 1 1 1 1 >> ones(4,3) ans = 1 1 1 1 1 1 1 1 1 1 1 1 3、>> zeros(2) ans =
0 0 0 0 >> zeros(4) ans = 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 >> zeros(2,2) ans = 0 0 0 0 >> zeros(2,3) ans = 0 0 0 0 0 0 >> zeros(3,2) ans = 0 0 0 0 00 4、随机阵>> rand(2,3) ans = 0.2785 0.9575 0.1576 0.5469 0.9649 0.9706 >> rand(2,3)
中南大学物化课后习题答案 11章 表面化学与胶体化学
第11章表面化学与胶体化学 1.在293 K时,把半径为1×10st1:chmetcnv TCSC="0" NumberType="1" Negative="True" HasSpace="False" SourceValue="3" UnitName="m">-3m的水滴分散成半径为1×10-6m的小水滴,比表面增加多少倍?表面吉布斯自由能增加多少?环境至少需做功多少?已知293 K时 。 (答案:9.15×10-4 J) 解:一滴大水滴可分散成N个小水滴: 小水滴的面积为:,大水滴的面积为:4π 面积增加倍数为: 2.在298 K时,1,2—二硝基苯(NB)在水中所形成的饱和溶液的浓度为5.9×10-3mol·L-1,计算直径为1×10-8m的NB微球在水中的溶解度。已知298 K时NB/水的表面张力为25.7 mN·m-1,NB 的密度为1 566 kg·m-3。 (答案:2.625×10-3 mol·dm-3) 解:根据开尔文公式:,将数值代入,得: 3.373 K时,水的表面张力为58.9 mN·m-1,密度为958.4 kg·m-3,在373 K时直径为
1×10-7m的气泡内的水蒸气压为多少?在101.325 kPa外压下,能否从373 K的水中蒸发出直径为1×10-7m的气泡? (答案:99.89kPa) 解:气泡为凹面,且r = 0.5×10-7m 因p r p外,故不能蒸发出直径为1×10-7m的气泡。 4.水蒸气骤冷会发生过饱和现象。在夏天的乌云中,用干冰微粒撒于乌云中使气温骤降至293 K,此时水气的过饱和度(p/ps)达4,已知293 K时, ρ(H2O)=997 kg·m-3。求算:(1)开始形成雨滴的半径;(2)每一滴雨中所含的水分子数。 (答案:7.8×10-10 m,66个) 解:(1)据开尔文公式得: (2) 设雨滴为球形,则一个雨滴的体积为: 雨滴中的水分子数为: (个) 5.已知293 K时,,,。试判断水能否在汞表面上铺展开来?
中南大学制造系统自动化技术实验报告整理
制造系统自动化技术 实验报告 学院:机电工程学院 班级:机制**** 姓名:张** 学号: *********** 指导教师:李** 时间: 2018-11-12 实验一柔性自动化制造系统运行实验 1.实验目的 (1)通过操作MES终端软件,实现对柔性制造系统的任务下达和控制加工,让学生
了解智能制造的特征及优势。 (2)通过创意性的实验让学生了解自动化系统总体方案的构思。 (3)通过总体方案的构思让学生了解该系统的工作原理,并学会绘制控制系统流程图,掌握物料流、信息流、能量流的流动路径。 (4)通过总体方案的构思让学生掌握各机械零部件、传感器、控制元器件的工作原理及性能。 (5)通过实验系统运行让学生了解运行的可靠性、安全性是采用何种元器件来实现的,促进学生进行深层次的思考和实践。 2.实验内容 (1)仔细观察柔性自动化制造系统的实现,了解柔性自动化制造系统的各个模块,熟悉各个模块的机械结构。 (2)了解各种典型传动机构的组装、工作原理、以及如何实现运动方向和速度的改变; (3)学习多种传感器的工作原理、性能和使用方法; (4)了解典型驱动装置的工作原理、驱动方式和性能; (5)理解柔性制造系统的工作原理,完成柔性制造系统的设计、组装; (6)实现对柔性制造系统的控制与检测,完成工件抓取、传输和加工。
3.实验步骤 (1)柔性制造系统的总体方案设计; (2)进行检测单元的设计; (3)进行控制系统的设计; (4)上下料机构的组装与检测控制; (5)物料传输机构的组装与实现; (6)柔性制造系统各组成模块的连接与控制; (7)柔性制造系统各组成单元的状态与工件状态位置的检测; (8)对机器人手动操作,实现对工件的抓取、传输。 4. 实验报告 ①该柔性自动化制造系统由哪几个主要的部分组成; 主要由:总控室工作站、AGV小车输送物料机构、安川机器人上下料工作站、法那科机器人上下料工作站、ABB机器人组装工作站、视觉检测及传送工作站、激光打标工作站、堆垛机及立体仓储工作站。 ②画出该柔性自动化制造系统的物料传输系统结构简图;
中南大学 计算机体系结构实验报告
计算机体系结构课程设计 学院:信息科学与工程学院 专业班级: 指导老师: 学号: 姓名:
目录 实验1 对指令操作码进行霍夫曼编码 (3) 一、实验目的 (3) 二、实验内容 (3) 三、设计思路 (4) 四、关键代码 (4) 五、实验截图 (5) 六、源代码 (5) 实验2 使用LRU 方法更新Cache (8) 一、实验目的 (8) 二、实验内容 (8) 三、设计思路 (9) 四、程序截图 (9) 五、实验代码 (9) 实验总结 (16) 参考文献 (16)
实验1 对指令操作码进行霍夫曼编码一、实验目的 了解和掌握指令编码的基本要求和基本原理 二、实验内容 1. 使用编程工具编写一个程序,对一组指令进行霍夫曼编码,并输出最后的编码结果以及对指令码的长度进行评价。与扩展操作码和等长编码进行比较。 2. 问题描述以及问题分析 举例说明此问题,例如: 下表所示: 对此组指令进行 HUFFMAN 编码正如下图所示: 最后得到的HUFFMAN 编码如下表所示:
最短编码长度为: H=0.45*1+0.30*2+0.15*3+0.05*4+0.03*5+0.01*6+0.01*6=-1.95. 要对指令的操作码进行 HUFFMAN 编码,只要根据指令的各类操作码的出现概率构造HUFFMAN 树再进行 HUFFAM 编码。此过程的难点构造 HUFFMAN 树,进行 HUFFAM 编 码只要对你所生成的 HUFFMAN 树进行中序遍历即可完成编码工作。 三、设计思路 观察上图,不难看出构造 HUFFMAN 树所要做的工作:1、先对各指令操作码的出现概率进行排序,构造一个有序链表。2、再取出两个最小的概率节点相加,生成一个生的节点加入到链表中,同时从两表中删除此两个节点。3、在对链表进行排序,链表是否只有一个节点,是则 HUFFAN 树构造完毕,否则继续做 2 的操作。为此设计一个工作链表(链表的元素时类,此类的功能相当结构。)、HUFFMAN 树节点、HUFFMAN 编码表节点。 四、关键代码 哈夫曼树重点在于如何排列权值大小不同的结点的顺序 private int leafNum; //叶子结点个数 private HaffmanNode[] hnodes; //哈夫曼树的结点数组 public HaffManCode(double[] weight) //构造指定权值集合的哈夫曼树 { int n = weight.length; //n个叶子结点 this.leafNum = n; this.hnodes = new HaffmanNode[2*n-1]; //n个叶子结点的哈夫曼树共有2n-1个结点 for(int i=0; i 中南大学考试试卷03 一、单选题(每题2分,共24分) 1. 1 mol 理想气体,从始态(p,V,T ) 出发,分别进行⑴恒温可逆膨胀和⑵绝热可逆膨胀过程,若两过程所达到的末态体积相同,则两过程体积功的关系是()(A)| W⑴| = | W⑵| (B)| W⑴| > | W⑵| (C)| W⑴| < | W⑵| (D)无法确定 2. 在T 和pΘ下,C (石墨) + O2(g) === CO2(g) 的反应热为△r H mΘ(T)。下列说法中不正确的是 ()(A)△r H mΘ(T)是CO2(g) 在温度T 下的标准生成焓(B)△r H mΘ(T) = △r U mΘ(T) (C)△r H mΘ(T)是C (石墨) 在温度T 下的标准燃烧焓(D)△r H mΘ(T) > △r U mΘ(T) 3. 在确定的T 、p下,无论用什么手段进行一个A + B === C 的反应,若反应的△r H m > 0,则该反应的反应热()(A)大于零(B)小于零(C)视反应手段而定(D)等于零 4. 某单组分体系的V m(l) > V m(s),当体系的压力升高时,其熔点将()(A)升高(B)降低(C)不变(D)不确定 5. 使用热力学判据△G T,p,W’=0 < 0 判别某过程方向时,下标p 所表示的是()(A)体系中每一组分的分压(B)体系的总压(C)外压(D)标压pΘ 6.下列针对偏摩尔量的描述,不正确的是( ) (A)偏摩尔量是体系某种容量性质的一种偏微分 (B)偏摩尔量是体系的强度性质,状态函数 (C)体系的偏摩尔量可正、可负、亦可为零 (D)体系中某组分的偏摩尔Gibbs自由能就是该组分的化学势 7. 恒温恒压下由纯组分形成理想溶液,下列各量中为零的是()(A)Δmix G(B)Δmix S(C)Δmix H(D)Δmix A 8. 关于溶液中某组分的活度及活度系数,不正确的是()(A)活度相当于是校正浓度,但无量纲 (B)活度及活度系数的大小与参考态的选择有关 (C)理想溶液中各组分的活度系数皆为1 (D)活度及活度系数的大小与标准态的选择有关 机械制造工艺学实验报告 班级机械1301 姓名黄佳清 学号 07 中南大学机电学院 《机械制造工艺学》课程实验报告 实验名称:加工误差的统计分析 姓名:黄佳清班级:机械1301 学号: 07 实验日期: 2015 年 10 月 18 日指导教师:成绩: 1. 实验目的 (1)掌握加工误差统计分析方法的基本原理和应用。 (2)掌握样本数据的采集与处理方法,要求:能正确地采集样本数据,并能通过对样本 数据的处理,正确绘制出加工误差的实验分布曲线和图。 (3)能对实验分布曲线和图进行正确地分析,对加工误差的性质、工序能力及工艺 稳定性做出准确的鉴别。 (4)培养对加工误差进行综合分析的能力。 2. 实验内容与实验步骤 1.按加工顺序测量工件的加工尺寸,记录测量结果。 2.绘制直方图和分布曲线 1)找出这批工件加工尺寸数据的最大值x max和最小值x min,按下式计算出极差R。 R=x max一x min 2)确定分组数K(K一般根据样本容量来选择,建议可选在8~11之间)。 3)按下式计算组距 d。 4)确定组界(测量单位:微米)。 5)做频数分布表。 6)计算x和 。 7)画直方图 以样本数据值为横坐标,标出各组组界;以各组频率密度为纵坐标,画出直方图。 8)画分布曲线 若工艺过程稳定,则误差分布曲线接近正态分布曲线;若工艺过程不稳定,则应根据实际情况确定其分布曲线。画出分布曲线,注意使分布曲线与直方图协调一致。 9)画公差带 在横轴下方画出公差带,以便与分布曲线相比较。 3.绘制图 1)确定样组容量,对样本进行分组 样组容量m 通常取4或5件。按样组容量和加工时间顺序,将样本划分成若干个样组。 2)计算各样组的平均值和极差 对于第i 个样组,其平均值和极差计算公式为: ∑==m j ij i x m x 1 1 式中 ——第i 个样组的平均值; ——第i 个样组的标准差; ——第i 个样组第j 个零件的测量值; ——第i 个样组数据的最大值; ——第i 个样组数据的最小值 3)计算图控制限(计算公式见实验原理) 4)绘制 图 以样组序号为横坐标,分别以各样组的平均值和极差R 为纵坐标,画出图,并在图上标出中心线和上、下控制限。 4. 按下式计算工序能力系数Cp 5. 判别工艺过程稳定性 可按下表所列标准进行判别。注意,同时满足表中左列3个条件,工艺过程稳定;表中右列条件之一不满足,即表示工艺过程不稳定。 中南大学考试试卷(A-D卷) 2008 --2009 学年一学期 物理化学实验研究方法课程24学时1学分考试形式:闭 卷 专业年级:冶金、环境类07级总分100分,占总评成绩50 % 注:此页不作答题纸,请将答案写在答题纸上 考试内容分为笔试(30分钟)和操作考试(2.5小时),备有8套试题,学生抽签选择。此处列举4套示例。 A卷试题和参考答案 一、单项选择(每小题2分,共20分) 1. “阴极极化曲线的测定”实验所测的是哪一种超电势? (A) 氢电极的电阻超电势(B) 氢电极的浓差超电势 (C)氢电极的活化超电势(D) 氧电极的活化超电势 2. 在乙酸乙酯皂化反应实验中, 若CH3COOC2H5和NaOH溶液的浓度均为0.010 mol·dm-3, 等体积混合后, 则反应终止时体系的电导率可用下列哪种溶液的电导值代替 (A)0.010 mol·dm-3 NaOH (B) 0.005 mol·dm-3 NaOH (C)0.005 mol·dm-3 CH3COOH (D) 0.005 mol·dm-3 CH3COONa 3. 在Fe(OH)3溶胶的纯化过程中, 不能透过半透膜的物质是: (A) Fe3+(B) Cl-(C) Fe(OH)3(D) H2O 4. 福庭式气压计的读数校正不包含以下哪一种校正 (A) 温度校正(B) 重力加速度校正(C)仪器校正(D)露茎校正 5.电导率仪在用来测量电导率之前, 必须进行: (A) 零点校正(B) 满刻度校正(C) 定电导池常数(D) 以上三种都需要 6. 在氧弹实验中, 若测得?c H m= -5140.7 kJ·mol-1, ?|?H|最大=25.47 kJ·mol-1, 则实验结果的正确表示应为: (A) ?c H m= -5140.7 kJ·mol-1(B) ?c H m= -5140.7±25.47 kJ·mol-1 (C) ?c H m= -(5.1407±0.02547)×103 kJ·mol-1(D) ?c H m= -5140.7±25.5 kJ·mol-1 7. 在测定纯水的饱和蒸气压的实验中, 我们是通过测定不同外压下纯水的沸点来进行的, 这种测定饱和蒸气压的方法是属于: (A) 静态法(B) 饱和气流法(C)动态法(D) 流动法 8. 用差热分析仪测定固体样品的相变温度,选用哪种物质做基准物较合适: (A) 无水氯化钙(B)三氧化二铝(C) 苯甲酸(D) 水杨酸 9. 测量溶液的电导时, 应使用: 原子力显微镜 一、实验目的 1.了解原子力显微镜的工作原理。 2.初步掌握用原子力显微镜进行表面观测的方法。 二、实验原理 1.AFM (1)AFM的工作原理 在AFM中用一个安装在对微弱力极敏感的微悬臂上的极细探针。当探针与样品接触时,由于它们原子之间存在极微弱的作用力(吸引或排斥力) ,引起微悬臂偏转。扫描时控制这种作用力恒定,带针尖的微悬臂将对应于原子间作用力的等位面,在垂直于样品表面方向上起伏运动, 因而会使反射光的位置改变而造成偏移量,通过光电检测系统(通常利用光学、电容或隧道电流方法) 对微悬臂的偏转进行扫描,测得微悬臂对应于扫描各点的位置变化, 此时激光检测器会记录此偏移量,也会把此时的信号给反馈系统,以利于系统做适当的调整。将信号放大与转换从而得到样品表面原子级的三维立体形貌图像。 AFM 的核心部件是力的传感器件, 包括微悬臂(Cantilever) 和固定于其一端的针尖。根据物理学原理,施加到Cantilever 末端力的表达式为: F = KΔZ ΔZ 表示针尖相对于试样间的距离, K 为Can2tilever 的弹性系数,力的变化均可以通过Cantilever 被检测。 (2)AFM关键部位: AFM关键部份是力敏感元件和力敏感检测装置。所以微悬臂和针尖是决定AFM灵敏度的核心。为了能够准确地反映出样品表面与针尖之间微弱的相互作用力的变化,得到更真实的样品表面形貌,提高AFM 的灵敏度,微悬臂的设计通常要求满足下述条件: ①较低的力学弹性系数,使很小的力就可以产生可观测的位移; ②较高的力学共振频率; ③高的横向刚性,针尖与样品表面的摩擦不会使它发生弯曲; ④微悬臂长度尽可能短;⑤微悬臂带有能够通过光学、电容或隧道电流方法检测其动态位移的镜子或电极; ⑥针尖尽可能尖锐。 (3) AFM的针尖技术 探针是AFM的核心部件。如右图。 目前,一般的探针式表面形貌测量仪垂直分辨率已达到0.1 nm , 因此足以检测出物质表面的微观形貌。普通的AFM 探针材料是 硅、氧化硅或氮化硅(Si3N4 ) ,其最小曲率半径可达10 nm。由 于可能存在“扩宽效应”,针尖技术的发展在AFM中非常重要。 探针针尖的几何物理特性制约着针尖的敏感性及样品图像的空 间分辨率。因此针尖技术的发展有赖于对针尖进行能动的、功 能化的分子水平的设计。只有设计出更尖锐、更功能化的探针, 改善AFM 的力调制成像(force modulation imaging) 技术和相 位成像(phase imaging)技术的成像环境,同时改进被测样品的 制备方法,才能真正地提高样品表面形貌图像的质量。 (4) AFM的工作模式 AFM 有三种不同的工作模式: 接触模式( contact mode) 、非接触模式(noncontact mode) 和共振模式或轻敲模式(Tapping Mode) 。 ①接触模式 接触模式包括恒力模式(constant2force mode) 和恒高(constant2height mode) 。在恒力模式中过反馈线圈调节微悬臂的偏转程度不变,从而保证样品与针尖之间的作用力恒定,当 一、是非判断题: 1.粗氯化钠必须用称量纸称量。(非) 2.溶解粗氯化钠时,加入的20ml蒸馏水需要很精确。(非) 3.用玻璃棒搅拌溶解氯化钠时,玻璃棒不应该碰撞烧杯内壁。(是) 4.可以把粗氯化钠溶液配制成饱和溶液。(非) 5.粗氯化钠溶液中含有不溶性杂质和可溶性杂质,必须先将不溶性杂质过滤除去。(是) 6.可以用无毒的CaCl2代替毒性很大的BaCl2除SO42- 。( 非) 7.BaSO4刚沉淀完全就应该立刻过滤。(非) 8.待过滤的溶液都应该冷却至室温再过滤。(非) 9.除去SO42-、Mg2+、Ca2+、K+离子的先后顺序可以倒置过来。(非) 10.氯化钠溶液在蒸发结晶过程中可以不搅拌,直到蒸干为止。(非) 实验五硫酸铝的制备 一、是非判断题: 1. NH4HCO3的作用是为了调节溶液pH值,以便生成Al(OH)3沉淀。( 是) 2. Al2(SO4)3的结晶水合物只有Al2(SO4)3·18H2O一种。( 非) 3. 在生成Al(OH)3 的过程中要加热煮沸并不断搅拌。( 是) 4. 硫酸铝加热至赤热分解成SO3和Al2O3。( 是) 5. 停止减压过滤时,操作不当会导致自来水溢入吸滤瓶内。( 是) 二、选择填空题: 1.在Al3+溶液中加入茜素的氨溶液,生成( A )色沉淀。 A.红色B.白色C.蓝色D.黑色 2.Al2(SO4)3易与碱金属M I(除Li以外)的硫酸盐结合成(B )。 A.配合物B.矾C.混合物 3.在蒸发皿中制备硫酸铝晶体时,加热浓缩至溶液体积为原来的(A )左右,在空气中缓慢冷却结晶。A.1/2 B.1/3 C.2/3 D.2/5 4.硫酸铝可作净水剂,是因为与水作用所得的(B )具有很强的吸附性能。 A.结晶水合物B.氢氧化铝C.Al2(SO4)3胶体 5.下面Al3+形成的配合物中,哪一个是错误的。(D) A.[AlF6]3- B.[Al(C2O4)3]3- C.[Al(EDTA)]- D.[AlBr6]3- 中南大学 X射线衍射实验报告 学院专业班级 姓名学号同组者 月日指导教师 实验 日期 评分分评阅人评阅日期 实验目的 1)掌握X射线衍射仪的工作原理、操作方法; 2)掌握X射线衍射实验的样品制备方法; 3)学会X射线衍射实验方法、实验参数设臵,独立完成一个衍射实验测试; 4)学会MDI Jade 6的基本操作方法; 5)学会物相定性分析的原理和利用Jade进行物相鉴定的方法; 6)学会物相定量分析的原理和利用Jade进行物相定量的方法。 本实验由衍射仪操作、物相定性分析、物相定量分析三个独立的实验组成,实验报告包含以上三个实验内容。 一、实验原理 1、X射线衍射仪 (1)X射线管 X射线管工作时阴极接负高压,阳极接地。灯丝附近装有控制栅,使灯丝发出的热电子在电场的作用下聚焦轰击到靶面上。阳极靶面上受电子束轰击的焦点便成为X射线源,向四周发射X射线。在阳极一端的金属管壁上一般开有四个射线出射窗口。转靶X射线管采用机械泵+分子泵二级真空泵系统保持管内真空度, 阳极以极快的速度转动,使电子轰击面不断改变,即不断改变发热点,从而达到提高功率的目的 (2)测角仪系统 测角仪圆中心是样品台,样品台可以绕中心轴转动,平板状粉末多晶样品安放在样品台上,样品台可围绕垂直于图面的中心轴旋转;测角仪圆周上安装有X 射线辐射探测器,探测器亦可以绕中心轴线转动;工作时,一般情况下试样台与探测器保持固定的转动关系(即θ-2θ连动),在特殊情况下也可分别转动;有的仪器中样品台不动,而X 射线发生器与探测器连动。 (3)衍射光路 2、物相定性分析 1) 每一物相具有其特有的特征衍射谱,没有任何两种物相的衍射谱是完全相同 的 2) 记录已知物相的衍射谱,并保存为PDF 文件 3) 从PDF 文件中检索出与样品衍射谱完全相同的物相 4) 多相样品的衍射谱是其中各相的衍射谱的简单叠加,互不干扰,检索程序能 从PDF 文件中检索出全部物相 3、物相定量分析 物相定量分析——绝热法 在一个含有N 个物相的多相体系中,每一个相的RIR 值(参比强度)均为已知的情况下,测量出每一个相的衍射强度,可计算出其中所有相的质量分数: 其中某相X 的质量分数可表示为: ∑ == N A i i A i X A X X K I K I W 式中A 表示N 个相中被选定为内标相的物相名称 式中A O Al X O Al X A K K K 3 232= 右边是两个物相X 和A 的RIR 值,可以通过实测、计算或查找PDF 卡片获得。 样品中只含有两相A 和B ,并选定A 为内标物相,则有:中南大学物化考试卷3
中南大学机械制造工艺学实验报告
物化实验试卷
原子力显微镜实验报告_南京大学
中南大学无机化学实验预习题
中南大学x射线实验报告参考