磁性编码器构成及原理

磁性编码器构成及原理
磁性编码器主要部分由磁阻传感器、磁鼓、信号处理电路组成。将磁鼓刻录成等间距的小磁极,磁极被磁化后,旋转时产生周期分布的空间漏磁场。磁传感器探头通过磁电阻效应将变化着的磁场信号转化为电阻阻值的变化,在外加电势的作用下,变化的电阻值转化成电压的变化,经过后续信号处理电路的处理,模拟的电压信号转化成计算机可以识别的数字信号,实现磁旋转编码器的编码功能。
磁鼓充磁的目的是使磁鼓上的一个个小磁极被磁化,这样在磁鼓随着电动机旋转时,磁鼓能产生周期变化的空间漏磁,作用于磁电阻之上,实现编码功能。磁鼓磁极的个数决定着编码器的分辨率,磁鼓磁极的均匀性和剩磁强弱是决定编码器结构和输出信号质量的重要参数。下图:磁鼓表面的磁极分布
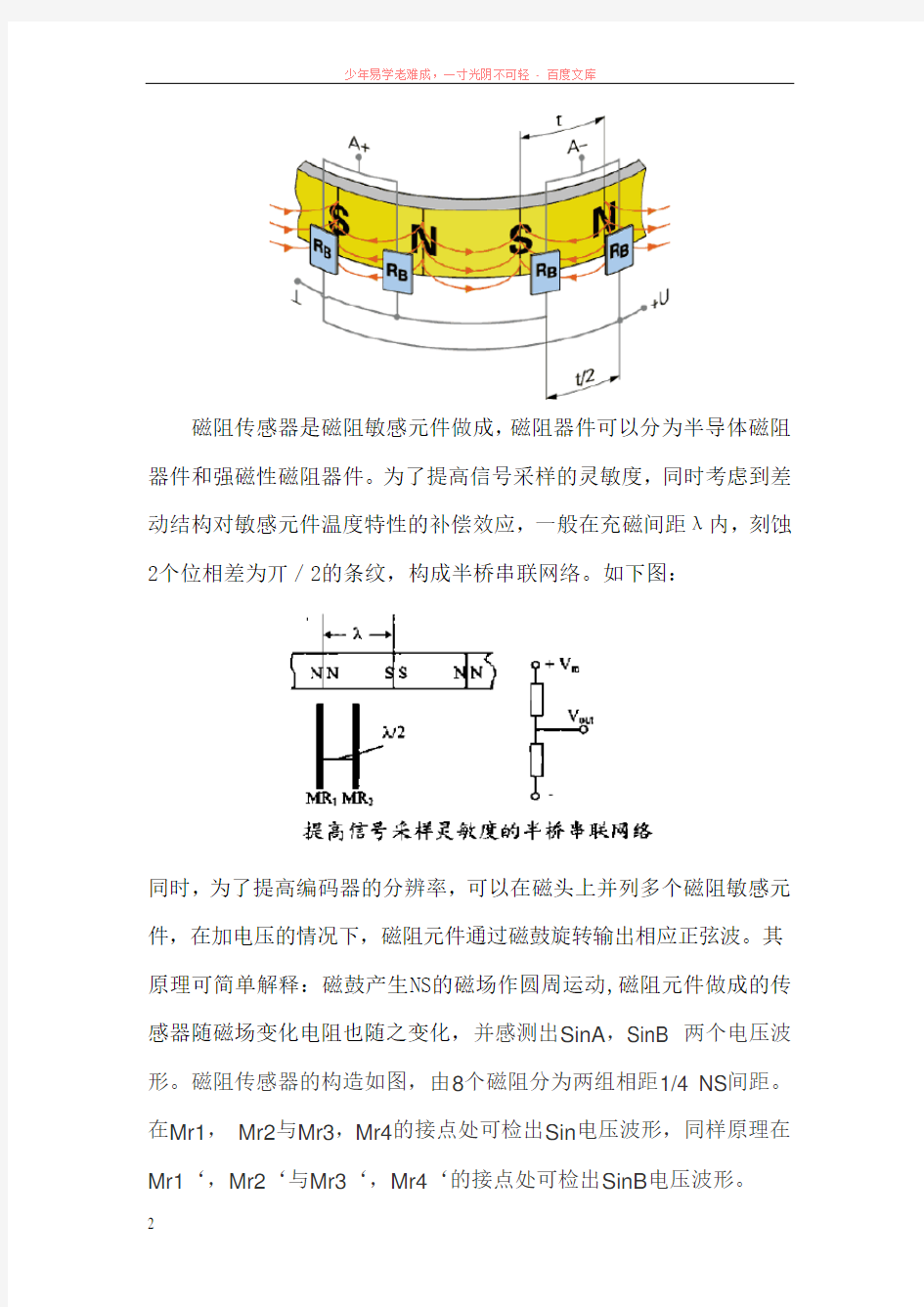
磁阻传感器是磁阻敏感元件做成,磁阻器件可以分为半导体磁阻器件和强磁性磁阻器件。为了提高信号采样的灵敏度,同时考虑到差动结构对敏感元件温度特性的补偿效应,一般在充磁间距λ内,刻蚀2个位相差为丌/2的条纹,构成半桥串联网络。如下图:
同时,为了提高编码器的分辨率,可以在磁头上并列多个磁阻敏感元件,在加电压的情况下,磁阻元件通过磁鼓旋转输出相应正弦波。其原理可简单解释:磁鼓产生NS的磁场作圆周运动,磁阻元件做成的传感器随磁场变化电阻也随之变化,并感测出SinA,SinB 两个电压波形。磁阻传感器的构造如图,由8个磁阻分为两组相距1/4 NS间距。在Mr1,Mr2与Mr3,Mr4的接点处可检出Sin电压波形,同样原理在Mr1‘,Mr2‘与Mr3‘,Mr4‘的接点处可检出SinB电压波形。
磁阻元件构成的磁阻传感器等效图
从磁阻传感器输出的两路波形
信号处理电路:SinA,SinB 信号到达信号处理电路后,为了能在cpu 取样的范围内,需对波形进行调整。首先AB相信号需先做DC电压准位调整,使AB相信号直流准位位于DSP A/D取样电压范围的中点,且振幅不超过取样电压范围,AB相信号再经过模拟滤波器及数字滤波器,将高频及谐波滤除后,通过DSP高速运算能力实时地将计算出位置和速度;另外还有一种处理方法是将SinA、SinB 信号直接通过信号处理电路转换成方波后再进DSP。后者可能软件处理起来更方便一些。
2013年9月2日