单片机35个实例1(汇编).

1.闪烁灯
1.实验任务
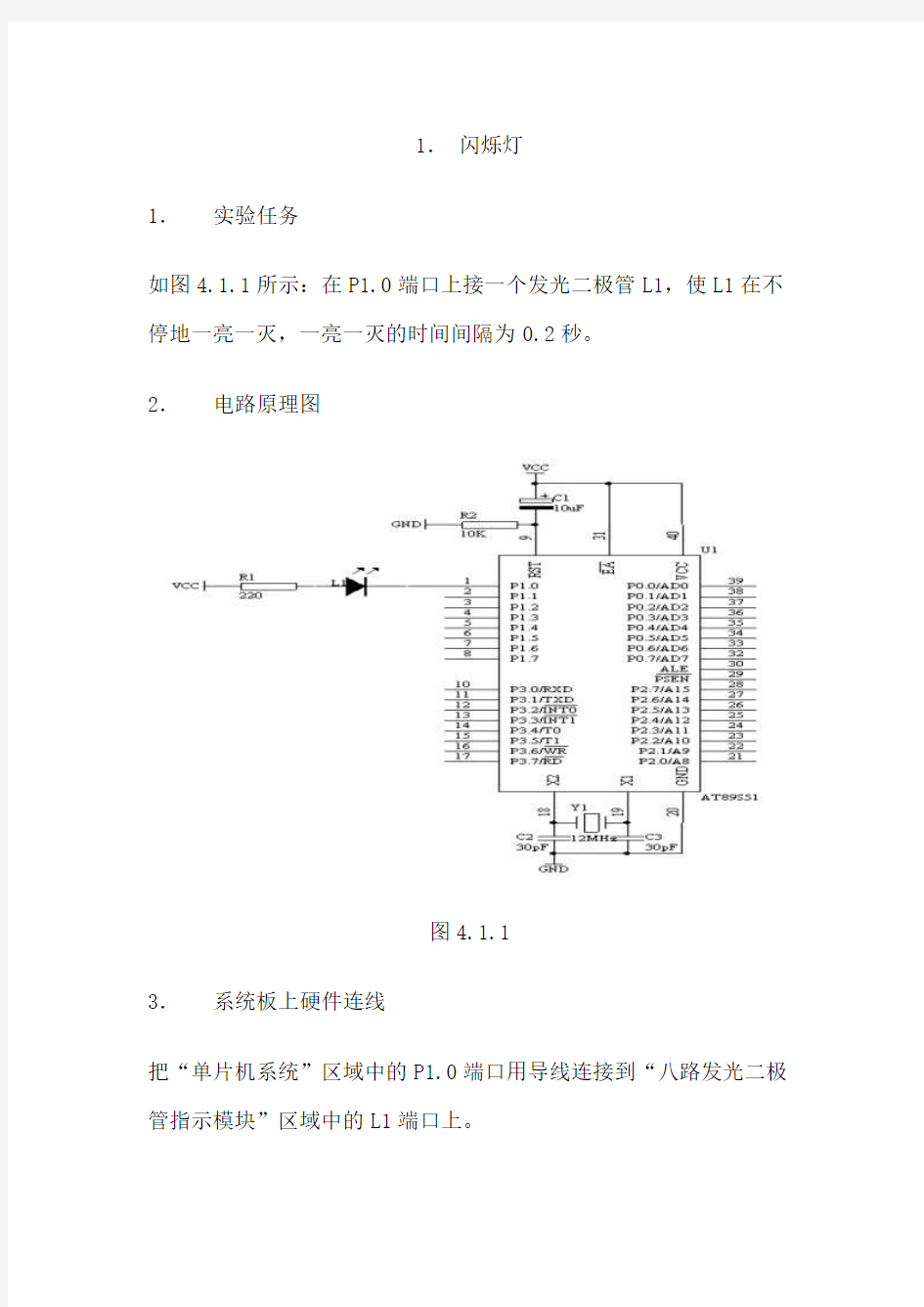
如图4.1.1所示:在P1.0端口上接一个发光二极管L1,使L1在不停地一亮一灭,一亮一灭的时间间隔为0.2秒。
2.电路原理图
图4.1.1
3.系统板上硬件连线
把“单片机系统”区域中的P1.0端口用导线连接到“八路发光二极管指示模块”区域中的L1端口上。
4.程序设计内容
(1).延时程序的设计方法
作为单片机的指令的执行的时间是很短,数量大微秒级,因此,
我们要求的闪烁时间间隔为0.2秒,相对于微秒来说,相差太
大,所以我们在执行某一指令时,插入延时程序,来达到我们
的要求,但这样的延时程序是如何设计呢?下面具体介绍其原
理:
如图4.1.1所示的石英晶体为12MHz,因此,1个机器周期为1微秒
机器周期微秒
MOV R6,#20 2个 2
D1: MOV R7,#248 2个 2 2+2×248=498 20×
DJNZ R7,$ 2个2×248 (498
DJNZ R6,D1 2个2×20=40
10002
因此,上面的延时程序时间为10.002ms。
由以上可知,当R6=10、R7=248时,延时5ms,R6=20、R7
=248时,延时10ms,以此为基本的计时单位。如本实验要求
0.2秒=200ms,10ms×R5=200ms,则R5=20,延时子程序如
下:
DELAY: MOV R5,#20
D1: MOV R6,#20
D2: MOV R7,#248
DJNZ R7,$
DJNZ R6,D2
DJNZ R5,D1
RET
(2).输出控制
如图1所示,当P1.0端口输出高电平,即P1.0=1时,根据
发光二极管的单向导电性可知,这时发光二极管L1熄灭;当
P1.0端口输出低电平,即P1.0=0时,发光二极管L1亮;我
们可以使用SETB P1.0指令使P1.0端口输出高电平,使用
CLR P1.0指令使P1.0端口输出低电平。
5.程序框图
如图4.1.2所示
图4.1.2 6.汇编源程序
ORG 0
START: CLR P1.0
LCALL DELAY
SETB P1.0
LCALL DELAY
LJMP START
DELAY: MOV R5,#20 ;延时子程序,延时0.2秒D1: MOV R6,#20
D2: MOV R7,#248
DJNZ R7,$
DJNZ R6,D2
DJNZ R5,D1
RET
END
7. C语言源程序
#include
sbit L1=P1^0;
void delay02s(void) //延时0.2秒子程序{
unsigned char i,j,k;
for(i=20;i>0;i--)
for(j=20;j>0;j--)
for(k=248;k>0;k--);
}
void main(void)
{
while(1)
{
L1=0;
delay02s(); L1=1;
delay02s(); }
2.模拟开关灯
1.实验任务
如图4.2.1所示,监视开关K1(接在P3.0端口上),用发光二极管L1(接在单片机P1.0端口上)显示开关状态,如果开关合上,L1亮,开关打开,L1熄灭。
2.电路原理图
图4.2.1
3.系统板上硬件连线
(1).把“单片机系统”区域中的P1.0端口用导线连接到“八路发光二极管指示模块”区域中的L1端口上;
(2).把“单片机系统”区域中的P3.0端口用导线连接到“四路拨动开关”区域中的K1端口上;
4.程序设计内容
(1).开关状态的检测过程
单片机对开关状态的检测相对于单片机来说,是从单片机的P3.0端
口输入信号,而输入的信号只有高电平和低电平两种,当拨开开关
K1拨上去,即输入高电平,相当开关断开,当拨动开关K1拨下去,
即输入低电平,相当开关闭合。单片机可以采用JB BIT,REL或者是JNB BIT,REL指令来完成对开关状态的检测即可。
(2).输出控制
如图3所示,当P1.0端口输出高电平,即P1.0=1时,根据发光二极管的单向导电性可知,这时发光二极管L1熄灭;当P1.0端口输出低电平,即P1.0=0时,发光二极管L1亮;我们可以使用SETB P1.0指令使P1.0端口输出高电平,使用CLR P1.0指令使P1.0端口输出低电平。
5.程序框图
图4.2.2
6.汇编源程序 ORG 00H
START: JB P3.0,LIG
CLR P1.0
SJMP START
LIG: SETB P1.0 SJMP START
END
7. C语言源程序
#include
sbit L1=P1^0;
void main(void)
{
while(1)
{
if(K1==0)
{
L1=0; //灯亮
}
else
{
L1=1; //灯灭
}
}
}
3.多路开关状态指示
1.实验任务
如图4.3.1所示,AT89S51单片机的P1.0-P1.3接四个发光二极管L1-L4,P1.4-P1.7接了四个开关K1-K4,编程将开关的状态反映到发光二极管上。(开关闭合,对应的灯亮,开关断开,对应的灯灭)。
2.电路原理图
图4.3.1
3.系统板上硬件连线
(1.把“单片机系统”区域中的P1.0-P1.3用导线连接到“八路发光二极管指示模块”区域中的L1-L4端口上;
(2.把“单片机系统”区域中的P1.4-P1.7用导线连接到“四路拨动开关”区域中的K1-K4端口上;
4.程序设计内容
(1.开关状态检测
对于开关状态检测,相对单片机来说,是输入关系,我们可轮流检测每个开关状态,根据每个开关的状态让相应的发光二极管指示,可以采用JB P1.X,REL或JNB P1.X,REL指令来完成;也可以一次性检测四路开关状态,然后让其指示,可以采用MOV A,P1指令一次把P1端口的状态全部读入,然后取高4位的状态来指示。
(2.输出控制
根据开关的状态,由发光二极管L1-L4来指示,我们可以用SETB P1.X和CLR P1.X指令来完成,也可以采用MOV P1,#1111XXXXB 方法一次指示。
5.程序框图
读P1口数据到A CC中
A CC内容右移4次
A CC内容与F0H相或
A CC内容送入P1口
图4.3.2 6.方法一(汇编源程序)
ORG 00H
START: MOV A,P1;P1=1111 0101
ANL A,#0F0H;P1=1111 0000
RR A
RR A
RR A
RR A
ORL A,#0F0H
MOV P1,A
SJMP START
END
单片机35个实例1(汇编)
1.闪烁灯 1.实验任务 如图4.1.1所示:在P1.0端口上接一个发光二极管L1,使L1在不停地一亮一灭,一亮一灭的时间间隔为0.2秒。 2.电路原理图 图4.1.1 3.系统板上硬件连线 把“单片机系统”区域中的P1.0端口用导线连接到“八路发光二极管指示模块”区域中的L1端口上。
4.程序设计内容 (1).延时程序的设计方法 作为单片机的指令的执行的时间是很短,数量大微秒级,因此, 我们要求的闪烁时间间隔为0.2秒,相对于微秒来说,相差太 大,所以我们在执行某一指令时,插入延时程序,来达到我们 的要求,但这样的延时程序是如何设计呢?下面具体介绍其原 理: 如图4.1.1所示的石英晶体为12MHz,因此,1个机器周期为1微秒 机器周期微秒 MOV R6,#20 2个 2 D1: MOV R7,#248 2个 2 2+2×248 =498 20× DJNZ R7,$ 2个2×248 (498 DJNZ R6,D1 2个2×20=40 10002
因此,上面的延时程序时间为10.002ms。 由以上可知,当R6=10、R7=248时,延时5ms,R6=20、R7 =248时,延时10ms,以此为基本的计时单位。如本实验要求 0.2秒=200ms,10ms×R5=200ms,则R5=20,延时子程序如 下: DELAY: MOV R5,#20 D1: MOV R6,#20 D2: MOV R7,#248 DJNZ R7,$ DJNZ R6,D2 DJNZ R5,D1 RET (2).输出控制 如图1所示,当P1.0端口输出高电平,即P1.0=1时,根据 发光二极管的单向导电性可知,这时发光二极管L1熄灭;当 P1.0端口输出低电平,即P1.0=0时,发光二极管L1亮;我 们可以使用SETB P1.0指令使P1.0端口输出高电平,使用 CLR P1.0指令使P1.0端口输出低电平。 5.程序框图
51单片机汇编程序范例
16位二进制数转换成BCD码的的快速算法-51单片机2010-02-18 00:43在做而论道上篇博文中,回答了一个16位二进制数转换成BCD码的问题,给出了一个网上广泛流传的经典转换程序。 程序可见: http: 32.html中的HEX2BCD子程序。 .说它经典,不仅是因为它已经流传已久,重要的是它的编程思路十分清晰,十分易于延伸推广。做而论道曾经利用它的思路,很容易的编写出了48位二进制数变换成16位BCD码的程序。 但是这个程序有个明显的缺点,就是执行时间太长,转换16位二进制数,就必须循环16遍,转换48位二进制数,就必须循环48遍。 上述的HEX2BCD子程序,虽然长度仅仅为26字节,执行时间却要用331个机器周期。.单片机系统多半是用于各种类型的控制场合,很多时候都是需要“争分夺秒”的,在低功耗系统设计中,也必须考虑因为运算时间长而增加系统耗电量的问题。 为了提高整机运行的速度,在多年前,做而论道就另外编写了一个转换程序,程序的长度为81字节,执行时间是81个机器周期,(这两个数字怎么这么巧!)执行时间仅仅是经典程序的!.近来,在网上发现了一个链接: ,也对这个经典转换程序进行了改进,话是说了不少,只是没有实质性的东西。这篇文章提到的程序,一直也没有找到,也难辩真假。 这篇文章好像是选自某个著名杂志,但是在术语的使用上,有着明显的漏洞,不像是专业人员的手笔。比如说文中提到的:
“使用51条指令代码,但执行这段程序却要耗费312个指令周期”,就是败笔。51条指令代码,真不知道说的是什么,指令周期是因各种机型和指令而异的,也不能表示确切的时间。 .下面说说做而论道的编程思路。;----------------------------------------------------------------------- ;已知16位二进制整数n以b15~b0表示,取值范围为0~65535。 ;那么可以写成: ; n = [b15 ~ b0] ;把16位数分解成高8位、低8位来写,也是常见的形式: ; n = [b15~b8] * 256 + [b7~b0] ;那么,写成下列形式,也就可以理解了: ; n = [b15~b12] * 4096 + [b11~b0] ;式中高4位[b15~b12]取值范围为0~15,代表了4096的个数; ;上式可以变形为: ; n = [b15~b12] * 4000 + {[b15~b12] * (100 - 4) + [b11~b0]} ;用x代表[b15~b12],有: ; n =x * 4000 + {x * (100 - 4) + [b11~b0]} ;即: ; n =4*x (千位) + x (百位) + [b11~b0] - 4*x ;写到这里,就可以看出一点BCD码变换的意思来了。 ;;上式中后面的位:
51单片机实用汇编程序库(word)
51 单片机实用程序库 4.1 流水灯 程序介绍:利用P1 口通过一定延时轮流产生低电平 输出,以达到发光二极管轮流亮的效果。实际应用中例如:广告灯箱彩灯、霓虹灯闪烁。 程序实例(LAMP.ASM) ORG 0000H AJMP MAIN ORG 0030H MAIN: 9 MOV A,#00H MOV P1,A ;灭所有的灯 MOV A,#11111110B MAIN1: MOV P1,A ;开最左边的灯 ACALL DELAY ;延时 RL A ;将开的灯向右边移 AJMP MAIN ;循环 DELAY: MOV 30H,#0FFH D1: MOV 31H,#0FFH D2: DJNZ 31H,D2 DJNZ 30H,D1 RET END 4.2 方波输出 程序介绍:P1.0 口输出高电平,延时后再输出低电 平,循环输出产生方波。实际应用中例如:波形发生器。 程序实例(FAN.ASM): ORG 0000H MAIN: ;直接利用P1.0 口产生高低电平地形成方波////////////// ACALL DELAY SETB P1.0 ACALL DELAY 10 CLR P1.0 AJMP MAIN ;////////////////////////////////////////////////// DELAY: MOV R1,#0FFH DJNZ R1,$ RET
五、定时器功能实例 5.1 定时1 秒报警 程序介绍:定时器1 每隔1 秒钟将p1.o 的输出状态改变1 次,以达到定时报警的目的。实际应用例如:定时报警器。程序实例(DIN1.ASM): ORG 0000H AJMP MAIN ORG 000BH AJMP DIN0 ;定时器0 入口 MAIN: TFLA G EQU 34H ;时间秒标志,判是否到50 个 0.2 秒,即50*0.2=1 秒 MOV TMOD,#00000001B;定时器0 工作于方式 1 MOV TL0,#0AFH MOV TH0,#3CH ;设定时时间为0.05 秒,定时 20 次则一秒 11 SETB EA ;开总中断 SETB ET0 ;开定时器0 中断允许 SETB TR0 ;开定时0 运行 SETB P1.0 LOOP: AJMP LOOP DIN0: ;是否到一秒//////////////////////////////////////// INCC: INC TFLAG MOV A,TFLAG CJNE A,#20,RE MOV TFLAG,#00H CPL P1.0 ;////////////////////////////////////////////////// RE: MOV TL0,#0AFH MOV TH0,#3CH ;设定时时间为0.05 秒,定时 20 次则一秒 RETI END 5.2 频率输出公式 介绍:f=1/t s51 使用12M 晶振,一个周期是1 微秒使用定时器1 工作于方式0,最大值为65535,以产生200HZ 的频率为例: 200=1/t:推出t=0.005 秒,即5000 微秒,即一个高电
单片机课程设计1
《单片机原理及接口》 课程设计报告 题目:十字路口交通灯模拟控制系统 专业名称:通信09 班级:1班 学号:910705116 姓名:简必建 2011年 12月
十字路口交通灯模拟控制系统 简必建 (电子信息工程系) 中文摘要:交通在人们的日常生活中占有重要的地位,随着人们社会活动的日益频繁,这点更是体现的淋漓尽致。交通信号灯的出现,使得交通得以有效管制,对于疏导交通流量、提高道路通行能力,减少交通事故有明显效果。本系统采用单片机89c51为中心器件来设计交通灯控制器,系统实用性强、操作简单、拓展性强。本系统就是采用单片机模拟十字路口交通灯的状态显示以及倒计时。 本设计系统由单片机I/O口扩展系统、交通灯状态显示系统、LED数码显示系统、等几大部分组成。系统除基本的交通功能外还有倒计时功能,较好的模拟路口可能出现的状况。软件上采用C语言编程,经过整机调试,实现了对十字路口交通灯的模拟。 关键词:单片机交通灯闯红灯检测车流量 二.功能概述 2.1设计任务:交通灯的硬件和软件设计 2.2设计目的 1.进一步熟悉和掌握单片机的结构和工作原理。 2.掌握单片机的接口技术及相关外围芯片的外特性,控制方法。 3.通过课程设计,掌握以单片机为核心的电路设计的基本方法和技术,了解有关电路参数的计算方法。 4.通过实际程序设计和调试,逐步掌握模块化程序设计方法和调试技术。 5.通过完成一个包括电路设计和程序开发的完整过程,为我们今后从事相应工作打下基础。三.设计思路 交通灯的变化规律 按照常规我们假设一个十字路口为东西南北走向。初始状态为状态1,南北方向绿灯通车,东西方向红灯。经过过一段时间(max-5)s转换状态2,南北方向绿灯闪几次转亮黄灯,延时5S,东西方向仍然红灯。再转换到状态3,东西方向绿灯通车,南北方向红灯。过一段
单片机汇编语言指令集
汇编语言的所有指令数据传送指令集 MOV 功能: 把源操作数送给目的操作数 语法: MOV 目的操作数,源操作数 格式: MOV r1,r2 MOV r,m MOV m,r MOV r,data XCHG 功能: 交换两个操作数的数据 语法: XCHG 格式: XCHG r1,r2 XCHG m,r XCHG r,m PUSH,POP 功能: 把操作数压入或取出堆栈 语法: PUSH 操作数POP 操作数 格式: PUSH r PUSH M PUSH data POP r POP m PUSHF,POPF,PUSHA,POPA 功能: 堆栈指令群 格式: PUSHF POPF PUSHA POPA LEA,LDS,LES 功能: 取地址至寄存器 语法: LEA r,m LDS r,m LES r,m XLAT(XLATB) 功能: 查表指令 语法: XLAT XLAT m 算数运算指令 ADD,ADC 功能: 加法指令 语法: ADD OP1,OP2 ADC OP1,OP2 格式: ADD r1,r2 ADD r,m ADD m,r ADD r,data 影响标志: C,P,A,Z,S,O SUB,SBB 功能:减法指令 语法: SUB OP1,OP2 SBB OP1,OP2 格式: SUB r1,r2 SUB r,m SUB m,r SUB r,data SUB m,data 影响标志: C,P,A,Z,S,O
INC,DEC 功能: 把OP的值加一或减一 语法: INC OP DEC OP 格式: INC r/m DEC r/m 影响标志: P,A,Z,S,O NEG 功能: 将OP的符号反相(取二进制补码) 语法: NEG OP 格式: NEG r/m 影响标志: C,P,A,Z,S,O MUL,IMUL 功能: 乘法指令 语法: MUL OP IMUL OP 格式: MUL r/m IMUL r/m 影响标志: C,P,A,Z,S,O(仅IMUL会影响S标志) DIV,IDIV 功能:除法指令 语法: DIV OP IDIV OP 格式: DIV r/m IDIV r/m CBW,CWD 功能: 有符号数扩展指令 语法: CBW CWD AAA,AAS,AAM,AAD 功能: 非压BCD码运算调整指令 语法: AAA AAS AAM AAD 影响标志: A,C(AAA,AAS) S,Z,P(AAM,AAD) DAA,DAS 功能: 压缩BCD码调整指令 语法: DAA DAS 影响标志: C,P,A,Z,S 位运算指令集 AND,OR,XOR,NOT,TEST 功能: 执行BIT与BIT之间的逻辑运算 语法: AND r/m,r/m/data OR r/m,r/m/data XOR r/m,r/m/data TEST r/m,r/m/data NOT r/m 影响标志: C,O,P,Z,S(其中C与O两个标志会被设为0) NOT指令不影响任何标志位 SHR,SHL,SAR,SAL 功能: 移位指令 语法: SHR r/m,data/CL SHL r/m,data/CL SAR r/m,data/CL SAL r/m,data/CL
单片机汇编语言经典一百例
51单片机实用程序库 流水灯 程序介绍:利用P1 口通过一定延时轮流产生低电平 输出,以达到发光二极管轮流亮的效果。实际应用中例如:广告灯箱彩灯、霓虹灯闪烁。 程序实例() ORG 0000H AJMP MAIN ORG 0030H MAIN: 9 MOV A,#00H MOV P1,A ;灭所有的灯 MOV A,#B
MAIN1: MOV P1,A ;开最左边的灯 ACALL DELAY ;延时 RL A ;将开的灯向右边移 AJMP MAIN ;循环 DELAY: MOV 30H,#0FFH D1: MOV 31H,#0FFH D2: DJNZ 31H,D2 DJNZ 30H,D1 RET END 方波输出 程序介绍:口输出高电平,延时后再输出低电 平,循环输出产生方波。实际应用中例如:波形发生器。
程序实例(): ORG 0000H MAIN: ;直接利用口产生高低电平地形成方波步移位 ;显示个,十,百,千算机的内部计算都是二进 制,而二进制每除一个2,实际上是向右移一次。所以为了计算方便,我们选择取6个数,最后在算除法的时候,只需要用单片机自带的右移位命令移2次就行了。 27 十六进制六位数加法(数码显示) 程序实例: ORG 0000H MAIN: ADNUMBER EQU 30H ;AD转换值 ADDNUMBER EQU 31H ;加数值1
ADL EQU 32H ;// ADH EQU 33H ;ADL转换高低位值 DISL EQU 34H ;// DISH EQU 35H ;显示高低位值 ADDTOTAL EQU 36H ;第一次AD转换值ADDJW EQU 37H ;加法进位数 ADDHOLD EQU 38H ADDFLAG EQU 39H ;加标志 ENDFLAG EQU 40H ;赋初值//////////////////////////////////////////// MOV ADDHOLD,#00H MOV ADDNUMBER,#00H MOV ADL,#00H MOV ADH,#00H MOV DISL,#00H
基于protuse的单片机模拟的实例
本人对单片机的一些了解,在这里和大家分享。 (1)基于AT89C52的同步串口通信 ①单片机1程序 (程序在Kile C51上运行通过。) /******************************************************************** * 文件名:液晶1602显示.c * 描述: 该程序实现了对液晶1602的控制。 * 创建人:东流,2009年4月10日 * 版本号:2.0 ***********************************************************************/ #include
***********************************************************************/ void delay() { int i,j; for(i=0; i<=100; i++) for(j=0; j<=20; j++) ; } /******************************************************************** * 名称: enable(uchar del) * 功能: 1602命令函数 * 输入: 输入的命令值 * 输出: 无 ***********************************************************************/ void enable(uchar del) { P2 = del; RS = 0; RW = 0; E = 0; delay(); E = 1; delay(); } /******************************************************************** * 名称: write(uchar del) * 功能: 1602写数据函数 * 输入: 需要写入1602的数据 * 输出: 无 ***********************************************************************/ void write(uchar del) { P2 = del; RS = 1; RW = 0; E = 0; delay(); E = 1; delay();
单片机课程设计[1]
实验项目:智力抢答器 一、设计目的 现如今电视节目日益丰富其中的竞赛环节也越来越多,其中智力抢答器是不可或缺的器材。在本学期学习了单片机这门课之后,我们小组成员觉得可以试着自己来实现抢答器的功能,令它能准确、公正、直观地判断出第一抢答者,并通过抢答器的数码管显示和蜂鸣器报警指出抢答组别。我们最终做出一种数字式抢答器的设计方案,通过Proteus设计完成,利用WAVE6000软件编辑程序,仿真验证,适用于多种竞赛场合。 二、设计要求 设计一个用于智力竞赛的抢答器,其功能的实现是由单片机控制的,满足(1)能容许2-6组进行抢答。 (2)能显示抢答组号。 (3)各组记分,并能记分显示。 (4)比赛结束时,能发出报警声 三、设计方案 在设计中采用的单片机是AT89C51,它主要负责控制各个部分协调工作。 P1.0和P1.7由裁判控制,分别是抢答开始和停止键。P1.1—P1.6是6组抢答的输入口,按下对应按钮即为抢答。P0口为数码管的段选口,位选口用的是P2口的低4位,外部中断0。外部中断1,P3.3用于控制有组答题完成后结束计时。P3.4—P3.5分别实现了时间的加一和减一。P3.6为蜂鸣器的控制口。外部中断和内部中断并存,单片机有硬件复位端,只要输入持续4个机器周期的高电平即可实现复位。外部还接有蜂鸣器用来发出报警音。采用7SEG-MPX4-CC-BLUE 显示,它是共阴极的由高电平点亮。系统仿真用到了WAVE6000和Proteus软件,通过仿真可以显示所设计系统的功能,对于程序的调试等有很大的帮助。 总体框图
四、硬件设计 总体设计电路图 整个系统分为:外部振荡电路、复位电路、加减分电路及蜂鸣器报警电路、抢答电路及裁判控制开始停止电路、数码管显示电路几个部分 本设计的核心是单片机AT89C51。 AT89C51 提供以下标准功能:4k 字节Flash 闪速存储器,128字节内部RAM,32 个I/O 口线,两个16位定时/计数器,一个5向量两级中断结构,一个全双工串行通信口,片内振荡器及时钟电路。同时,AT89C51可降至0Hz的静态逻辑操作,并支持两种软件可选的节电工作模式。空闲方式停止CPU的工作,但允许RAM,定时/计数器,串行通信口及中断系统继续工作。掉电方式保存RAM 中的内容,但振荡器停止工作并禁止其它所有部件工作直到下一个硬件复位。振荡电路使用外部振荡电路,由两个1nF的电容和一个晶体振荡外部震荡电路
单片机C语言程序设计实训100例--基于8051+PROTEUS仿真1
《单片机C语言程序设计实训100例—基于8051+Proteus仿真》案例第01 篇基础程序设计 01 闪烁的LED LED 名称:闪烁的/* 按设定的时间间隔闪烁说明:LED */ #include
主程序//void main() { while(1) { LED=~LED; DelayMS(150); } } 从左到右的流水灯02 名称:从左到右的流水灯/* LED8个口的说明:接在P0产生走从左到右循环依次点亮,马灯效果*/ #include
while(1) { P0=_crol_(P0,1); //P0的值向左循环移动 DelayMS(150); } } 03 8只LED左右来回点亮 /* 名称:8只LED左右来回点亮 说明:程序利用循环移位函数_crol_和_cror_形成来回滚动的效果*/ #include
单片机主要使用汇编语言
1.单片机主要使用汇编语言,而编写汇编语言程序设计人员必须精通 (指令系统)和(单片机硬件结构)。 2.CHMOS工艺是(CMOS)工艺和(HMOS)工艺结合,具有(低功 耗)的特点。 3.与8051比较80C51的最大特点是(使用CHMOS工艺)。 4.MCS—51单片机的时钟电路包括2部分,即芯片内的(高增益反相 放大器)和芯片外跨接的(晶体振荡器)与(微调电容)。 5.在MCS—51中,位处理器的数据位存储空间是由(专用寄存器)的 可寻址位和内部RAN为寻址区的(128)个位。 6.MCS—51的4个I/O口中,P0是真正的双向口,而其它的口则为准 双向的,这一区别在口线电路结构中表现在(口的输出缓冲器)的 不同上。 7.在寄存器间接寻址方式中,其“间接”体现在指令中寄存器的内容 不是操作数,而是操作数的(地址)。 8.在直接寻址方式中,只能使用(8)位二进制数作为直接地址,因此 其寻址对象只限于(内部RAM)。 9.在变址寻址方式中,以(累加器A)作变址寄存器,以(DPTR)或 (PC)作基址寄存器。 10.在相对寻址方式中,寻址得到的结果是(程序转移的目的地址)。 11.中断技术是解决资源竞争的有效方法,因此可以说中断技术实质上 是一个资源(共享)技术。 12.中断采样用于判断是否有中断请求信号,但MCS——51中只有(外 中断)才有中断采样的问题。 13.响应中断后,首先把(PC)内容压入堆栈,然后把长指令送(PC), 使程序转向(程序存储器)中的地址区。 14.从单片机的角度看,连接到数据总线的输出口应具有(锁存)功能, 连接到数据总线的输入口应具有(三态缓冲)功能。 15.在MCS—51单片机系统中,采用的编址方式是(统一编址方式)。 16.在查询和中断两种数据输入输出控制方式中,效率较高的是(中断 方式)。 17.输入口扩展是为了实现数据的(缓冲)功能,输出口扩展是为了实 现数据的(锁存)功能。 18.异步串行数据通信侦格式由(起始)位、(数据)位、(奇偶校验) 位和(停止)位组成。 19.串行接口电路的主要功能是(串行)化和(反串行)化,把侦中格 式信息滤除而保留数据位的操作是(反串行)化。 20.MCS—51的串行口在工作方式0下,是把串行口作为(同步移位) 寄存器使用。在串入并出移位下作(并行输出)口使用,在并入串 出移位下作(并行输入)口使用。 21.使用定时器/计数器1设置串行通信波特率时,应把定时器/计数器1 设定为工作方式(2),即(自动重新加载)方式。 22.D/A转换必须设置数据锁存器,这是因为(转换需要一定时间才能 完成,数字量需要稳定一段时间)。 23.对于电流输出的D/A转换器,为了得到电压的转换结果,应使用(运 算放大器)。 24.在脉冲调控法控制电机启动和调节电机转速的控制电路中,可使用 D/A转换器产生(调控脉冲)。 25.使用双缓冲方式的D/A转换器,可以实现多路模拟信号的(同步) 输出。 26.A/D转换器,按转换原理可分为4种,即(计数)式、(双积分)式、 (涿次逼近)式和(并行)式。 27.A/D转换器芯片ADC0809中,可作为查询的状态标志,可作为中断 请求信号使用的(转换结束)信号。28.把数/模转换器转换的数据传送给单片机,可使用的控制方式有(定 时传送)、(查询)和(中断)3中。 29.假定累加器A是内容为30H,执行指令:1000H:MOVC A,·A+PC 后把(1031H)单元送A中。 30.DPTR内容8100H,A内容40H执行MOVC A,·A+DPTR后送入 A的是(8140H)单元的内容。 31.SP=60H,ACC=30H,B=70H,执行PUSH ACC PUSH B后SP 为62H,61H为30H,62H为70H。 32.SP=62H,(61H)=30H,(62H)=70H执行POP DPH POP DPL后 DPTR为7030H,SP为60H。 33.A=50H,B=0A0H执行MUL AB后,B为32H,A为00H,CY为0, OV为1。 34.A=0FBH,B=12H执行DIV AB后,A为0DH,B为11H,CY为0, OV为0。 35.A=83H,R0=17H,(17H)=34H,执行ANL A,#17H ORL 17H, A XRL A,@R0 CPL A 后,A的内容为(CBH)。 1.80C51与87C51的区别在于(内部程序存储器的类型不同)。 2.80C51芯片采用的半导体工艺是(CHMOS)。 3.对程序计数器PC的操作(是自动进行啊)。 4.单片机程序存储器的寻址范围由PC决定,MCS—51的PC为16位, 因此其寻址范围是(64KB)。 5.PC和DPTR的结论中错误的是(它们都具有加“1”功能)。 6.不属于位处理器资源的是(通用寄存器的可寻址位)。 7.在相对寻址方式中,“相对”是指相对于(当前指令的末地址)。 8.对程序存储器的读操作,只能使用(MOVC指令)。 9.执行返回指令时,返回的断点是(调用指令下一条指令的首地址)。 10.可以为访问程序存储器提供和构成地址的有(PC、A、DPTR)。 11.原来寄存器0组为当前寄存器,现要改1组为当前寄存器组,不能 使用指令(MOV PSW。3,1)。 12.不是给程序存储器扩展使用的是(/WR). 13.不是给数据存储器扩展使用的是(/EA). 14.2片INTEL2732(4K×8),除应使用P0的8条外,还至少使用P2口的 口线(5条). 15.中断查询,查询的是(中断标志位). 16.在MCS—51中需要外加电路实现的中断撤除的是(电平方式的外部 中断). 17.执行中断返回指令,要从堆栈弹出断点地址, 从堆栈弹出的断点地址 送给(PC). 18.MCS—51中断优先级叙述中,错误的是(同时同级的多中断请求,将形 成阻塞,系统无法响应). 19.三态缓冲器的输出应具有3种状态,其中不包括(低阻抗状态). 20.在接口电路中的“口”一定的一个(可编址的寄存器). 21.在LED显示中,为了输出位控和段控信号,应使用指令(MOVX). 22.在D/A转换\并分时输入数据应用中,它的2级数据锁存结构可以(保 证各模拟电压能同时输出). 23.把DAC0832连接双缓冲方式数据转换中,错误的是(在程序中使用一 条MOVX指令输出数据). 24.执行MOV SP,#3AH/ MOV A,#20H / MOV B,#30H/ PUSH ACC/ PUSH B/ POP ACC/ POP B后,A和B的内容为(30H 20H) 1.MCS—51单片机的/EA信号有何功能?在使用8031时/EA信 号引脚如何处理? 答:/EA访问程序存储器控制信号,当/EA信号为低电平时,则对RO M的读操作限定在外部程序存储器,而当/EA信号为高电平时,则对RO M的读操作的从内部程序存储器开始,并可延续至外部程序存储器.在 使用8031时/EA信号引脚应接地. 2.内部RAM低128单元划分为哪3个主要部分?说明个部分的 使用特点答:分为寄存器区\位寻址区\用户RAM区 寄存器区:一般有2种使用方法1是以寄存器的形式使用,用寄 存器符号表示,2是以存储单元的形式使用,以单元地址表示. 位寻址区:一种是以位地址的形式,另一种是以存储单元地址加位 的形式表示. 用户RAM区:只能以存储单元的形式使用,其它没有任何规定和 限制. 3.堆栈有哪些功能?堆栈指示器(SP)的作用是什么?在程序设计 时,为什么要对SP重新赋值? 答:堆栈功能:保护断点和保护现场. SP的作用:为了指示栈顶地址所以要设置堆栈指示器(SP) SP的内容一经确定,堆栈的位置也就跟着确定下来,因为堆栈的 位置的浮动的,所以要对SP的初始化赋不同的值. 4.使单片机复位有几种方法?复位后机器的初始状态如何? 答:复位操作有上电自动复位和按键手动复位两重方式.. 复位后单片机 进入初始化操作,其主要功能是把PC初始化为0000H,使单片机从0000H单 元开始执行程序. 1.把长度为10HD的字符串从内部RAM的输入缓冲区inbuf向设在外部 RAM的输出缓冲区outbuf进行传送,一直进行到遇见回车符CR或整个字 符串传送完毕。 MOV R0,#inbuf/ MOV DPTR,#outbuf/ MOV R,#10H/ LOOP1:MOV A, @R0/ CJNE A,#0DH,LOOP2/ SJMP HERE/ LOOP2:MOVX @DPTR A/ INC R0/ INC DPTR/ DJNZ R1,LOOP1/HERE:SJMP HERE / END 2.内部RAM从list单元开始存放一正数表,表中之数作无序排列,并以“— 1”作结束标志。找出最小数。 MOV R0,#list/ LOOP1:MOV A,@R0/ CJNE A,#0FFH,LOOP2/ SJMP HERE/ LOOP2:INC R0/ MOV R1,A/ CLR C/ SUBB A,@R0/ JC LOOP3/ MOV A,@R0/ LOOP3:INC R0/ MOV A,R1/ SJMP L1/ HERE: SJMP HERE/ END 3.搜索一串ASCII码字符中最后一个非空格字符,字符串从外部RAM8100H 单元开始存放,并用一个回车符(0DH)作结束。编程实现搜索并把搜索 到的非格字符的地址存入内部RAM单元40H和41H中,其中高字节放入 41H单元。 MOV DPTR,#8100H/ LOOP1:MOVX A,@DPTR/ INC DPTR/ CJNE A, #0DH,LOOP1/ LOOP2:DEC DPL/ MOVX A,@DPTR/ CLR C/ SUBB A, #20H/ JZ LOOP2/ MOV 41H,DPH/ MOV 40H,DPL/ SJMP $/ END 4.从内部RAM20H单元开始存放一组带符号数,字节个数存在1FH中。请 统计出其中大于0、等于0和小于0的数的数目,并把统计结果分别存入 ONE、TWO、THREE3个单元中。 MOV R0,#20H/ MOV ONE,#00H/ MOV TWO,#00H/ MOV THREE, #00H/ L0:MOV A,@R0/ JNZ L1/ INC TWO/ SJMP L2/ L1:JNB ACC.7, L3/ INC THREE/ SJMP L3/ L3:INC ONE/ L2:INC R0/ DJNZ 1FH, L0/ HERE:SJMP HERE 5.5个双字节数,存放在外部RAM从barf开始的单元中,求它们和,把和 存放在sum单元中,请编程实现。 MOV R0,#barf/ MOV R3,#05H/ MOV R1,#SUM/ MOV R2,#03H/ CLR A/ L1:MOV @R1,A/ DJNZ R2,L1/ L2:CLR C/ MOV R1, #SUM/ MOV A,@R1/ SDDC A,@R0/ MOV @R1,A/ INC R0/ INC R1/ MOV A,@R0/ MOV A,R1,A/ INC R0/ MOV A,#00H/ MOV @R1,A/ INC R0/ DJNZ R3,L2 HERE:SJMP HERE 6.有晶振频率为6MHZ的MCS—51单片机,使用定时器0以定时方法在P1.0 输出周期为400us,占空比为10:1的矩形脉冲,以定时工作方式2编程实现. X1=28-20=236=0ECH X2=28-180=76=4CH ORG 0000H/ AJMP MAIN/ ORG 000BH/ AJMP S1/ ORG 0500H/ MAIN:MOV TMOD,@#02H/ SETB P1.0/ MOV TL0,#0ELH/ MOV TH0,#4CH/ MOV A,#0ECH/ SETB EA/ SETB ET0/ SETB TL0/ HERE:SJMP HERE/ ORG 06OOH/ S1:CPL P1.0/ XCH A,TH0/ RETI 5.什么是指令周期,机器周期和时钟周期?如何计算机器周期的确切时间? 答:指令周期的最大的时序定时单位,执行一条指令所需要的时间称之为指令 周期. 规定一个机器周期的宽度为6个状态,并依次表示为S1~S6.由于一个状态 又包括2个节拍,因此一个机器周期总共有12个节拍,分别记作 S1P1,S1P2,…….S6P2.由于一个机器周期共有12个振荡脉冲周期,因此机 器周期就是振荡脉冲的十二分频.当振荡脉冲频率为12MHZ时,一个机器 周期为1us,当震荡脉冲频率为6MHZ时,一个机器周期为2us. 6.定时的方法有? 答:软件定时;硬件定时;可编程定时器定时. 7.中断响应是有条件的,当存在哪些情况时,中断响应被封锁? 答○1CPU正处在为一个同级或高级的中断服务中;○2查询中断请求的机器 周期不是当前指令的最后一个机器周期;○3当前指令是返回指令(RET,RETI) 或访问IE、IP的指令. 在MCS-51单片机系统中,外接程序存储器和数据存储器共用16位地址线 和8位数据线,为什么不会冲突? 答:指令区分,读外部ROM使用指令“MOVC”读外部RAM使用指令 “MOVX”选通信号,外部ROM的选通信号为PSEN,外部RAM的选 通信号为RD和WR
单片机应用实例报告
单片机应用实例报告 零.序 这个学期一开始便接触了《单片微型计算机原理与接口技术》,听说是《微型计算机控制技术实用教程》的基础,对于工科的我来说学以致用无非是一切的一切,虽然还是个该领域的菜鸟,但是单片机之于自动化的意义不言而喻,对于这篇论文,以下开始展开,不足之处谅解。 一.概述 单片机是一种集成在电路芯片,是采用超大规模集成电路技术把具有数据处理能力的中央处理器CPU随机存储器RAM、只读存储器ROM、多种I/O口和中断系统、定时器/计时器等功能(可能还包括显示驱动电路、脉宽调制电路、模拟多路转换器、A/D转换器等电路)集成到一块硅片上构成的一个小而完善的计算机系统。 关于80C51:该系列单片机是采用高性能的静态80C51 设计由先进CMOS 工艺制造并带有非易失性Flash 程序存储器全部支持12 时钟和 6 时钟操作P89C51X2 和P89C52X2/54X2/58X2 分别包含128 字节和256 字节RAM 32 条I/O 口线 3 个16 位定时/计数器 6 输入4 优先级嵌套中断结构 1 个串行I/O 口可用于多机通信 I/O 扩展或全双工UART以及片内振荡器和时钟电路。此外,由于器件采用了静态设计,可提供很宽的操作频率范围,频率可降至0 。可实现两个由软件选择的节电模式,空闲模式和掉电模式,空闲模式冻结CPU但RAM 定时器,串口和中断系统仍然工作掉电模式保存RAM的内容但是冻结振荡器导致所有其它的片内功能停止工作。由于设计是静态的时钟可停止而不会丢失用户数据运行可从时钟停止处恢复的。 二.应用领域 目前单片机渗透到我们生活的各个领域,几乎很难找到哪个领域没有单片机的踪迹。导弹的导航装置,飞机上各种仪表的控制,计算机的网络通讯与数据传输,工业自动化过程的实时控制和数据处理,广泛使用的各种智能IC卡,民用豪华轿车的安全保障系统,录像机、摄像机、全自动洗衣机的控制,以及程控玩具、电子宠物等等,这些都离不开单片机。更不用说自动控制领域的机器人、智能仪表、医疗器械了。因此,单片机的学习、开发与应用将造就一批计算机应用与智能化控制的科学家、工程师。 单片机广泛应用于仪器仪表、家用电器、医用设备、航空航天、专用设备的智能化管理及过程控制等领域,大致可分如下几个范畴: 1.在智能仪器仪表上的应用 单片机具有体积小、功耗低、控制功能强、扩展灵活、微型化和使用方便等优点,广泛应用于仪器仪表中,结合不同类型的传感器,可实现诸如电压、功率、
单片机第一次实验
Cortex-M4原理与实践实验报告 实验一 GPIO 接口实验 一.实验目的 1. 掌握 Code Composer Studio 6.0(以下简称 CCS)的安装和配置步骤过程。 2. 了解 Cortex-M4 开发系统和计算机与目标系统的连接方法。 3. 了解 CCS 软件的操作环境和基本功能,了解 TM4C1294 软件开发过程。 1) 学习创建工程和管理工程的方法; 2) 了解基本的编译和调试功能; 3) 学会设置断点,注入和提取数据文件; 4) 学习使用观察窗口; 5) 了解图形功能的使用方法。 二.实验程序流程图
本实验通过多种方法来控制 GPIO 端口的读写,通过 GPIO 端口的读写来控制主板上两个独立的 LED 灯,D1、D2 的点亮和熄灭。主板上 D1、D2 、D3 对应的 GPIO 口分别为 PF1、 PF2、PF3。 三.实验代码、注释及现象 #include
单片机汇编语言编程规范
单片机汇编语言编程规范 2008年09月13日星期六 11:51 A.M. 单片机汇编语言编程规范 软件设计更多地是一种工程,而不是一种个人艺术。如果不统一编程规范,最终写出的程序,其可读性将较差,这 不仅给代码的理解带来障碍,增加维护阶段的工作量,同时不规范的代码隐含错误的可能性也比较大。分析表明,编码 阶段产生的错误当中,语法错误大概占20%左右,而由于未严格检查软件逻辑导致的错误、函数(模块)之间接口错误 及由于代码可理解度低导致优化维护阶段对代码的错误修改引起的错误则占了一半以上。可见,提高软件质量必须降低 编码阶段的错误率。如何有效降低编码阶段的错误呢?这需要制定详细的软件编程规范,并培训每一位程序员,最终的 结果可以把编码阶段的错误降至10%左右,同时也降低了程序的测试费用,效果相当显著。 本文从代码的可维护性(可读性、可理解性、可修改性)、代码逻辑与效率、函数(模块)接口、可测试性四个方 面阐述了软件编程规范,规范分成规则和建议两种,其中规则部分为强制执行项目,而建议部分则不作强制,可根据习 惯取舍。 1.排版 规则1 程序块使用缩进方式,函数和标号使用空格缩进,程序段混合使用TAB 和空格缩进。缩进的目的是使程序结构清晰,便 于阅读和理解。
51单片机50个实例代码
51单片机50个例程代码程序里有中断,串口等驱动,直接复制即可使用1-IO输出-点亮1个LED灯方法1 /*----------------------------------------------- 名称:IO口高低电平控制 论坛:https://www.360docs.net/doc/d35232704.html, 编写:shifang 日期:2009.5 修改:无 内容:点亮P1口的一个LED灯 该程序是单片机学习中最简单最基础的, 通过程序了解如何控制端口的高低电平 ------------------------------------------------*/ #include
名称:IO口高低电平控制 论坛:https://www.360docs.net/doc/d35232704.html, 编写:shifang 日期:2009.5 修改:无 内容:点亮P1口的一个LED灯 该程序是单片机学习中最简单最基础的, 通过程序了解如何控制端口的高低电平 ------------------------------------------------*/ #include