停车场管理系统设计与实现-外文翻译
附件1:外文资料翻译译文
基于FPGA的停车场管理系统的设计与实现
摘要
由于汽车数量在快速的增加。它造成污染(噪声和空气)交通挤塞的问题。为了克服这个问题。提出了基于FPGA 的停车系统。在本文,停车场系统实现了利用有限状态机模型。该系统具有两个主要模块即识别模块和检查模块的插槽,识别模块标识位访客,插槽检查模块检查有关插槽的状态,这些模块是在高密度脂蛋白中建模,在FPGA 上实现。结合传感器接口、步进电机、液晶屏的各种接口设计了一个原型的停车系统。
关键词︰有限状态机;停车场系统;容量-5
1.介绍
车辆交通拥堵是一个世界性的问题。近年来,已经全力在实现一种方法来减少拥堵、事故和灾害等停车问题。
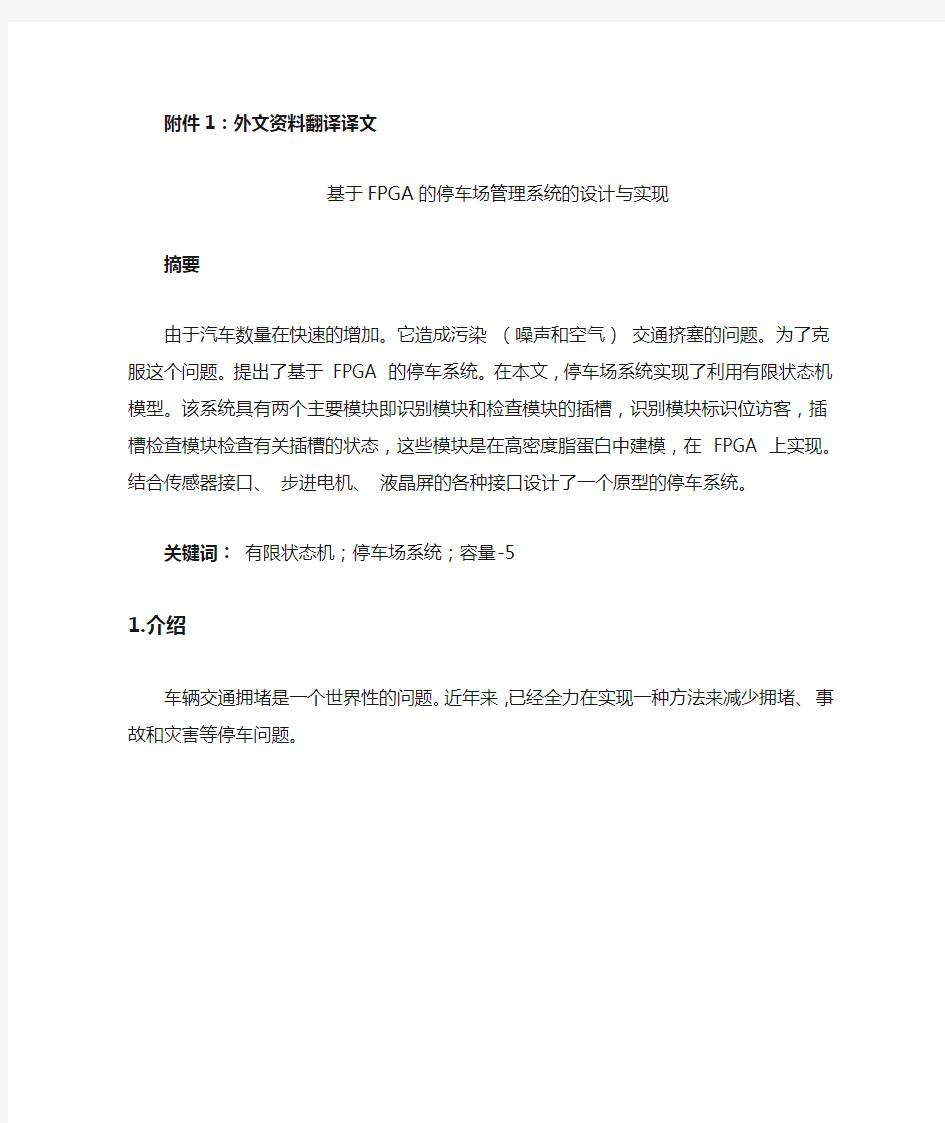
图1:城市交通拥堵趋势
如中所示图 1 拥塞显然逐年增加,它显示了一些问题。图中表明拥塞需要花更长的时间才能到从工作中"尖峰时刻"。停车场系统还可以利用创新技术提高
付费停车方便和快捷。现今,刷一下智能卡就可以实现付费功能,减少交易时间。移动设备也可以用于支付交易。公共地区需要停车系统,能够有效的运作,与其他城市公用地区相结合。因为没有适当方式,所以分配车位的停车场管理系统在协调和集中管理中呈现了失败的效果。为了避免这些问题,提出智能停车系统的设计,用基于FPGA 来检查某些功能块。
近年来,FPGA 的可重构是有效的方法来实现的设计,因为FPGA 提供通用处理器和ASIC 之间的协调。基于FPGA 的设计也更灵活,可编程,可重新加载。基于FPGA 的设计可以方便地修改软件部分。
2.相关工作
宫俊燕等相关人士,提出一种新颖,安全,智能的停车系统(智能停车)主要是基于保护无线网络与传感器通信。停车空间利用率高和免费、快速的现时间是提出研究的目的。苏春、安康山等,提出了用停车系统中的驱动程序来了解在停车场的帮助下SMS 服务空间的可用性。驱动程序可以发送短信实现请求新的空间,如果前一个被填满,驱动程序可以找到最近的空间停车使用基于无线移动的汽车停车系统。结果,表明该系统有效地分配的插槽和充分利用停车空间。安古普塔等,描述了阿克曼转向配置高效汽车停车算法。该算法利用几何计算路径规划。结果显示了一个快速、高效、安全的停车系统。花春潭等,提出了用于大型停车场的高效停车搜索技术。在这篇文章中,提出在道路附近的停车场安装摄像机和捕获关于汽车颜色和车牌识别的信息,并保存到数据库中。谢刚等,提出了一个停车系统,消除了关于空档停车的问题。作者使用无线技术来提高停车效率。宫俊燕等,提出通知基于停车系统。在这停车系统中,驱动程序可以查询及预订停车位,以及为安全目的加密/解密技术使用,仿真结果都是高效的。Insop Song等提出基于FPGA 停车系统,采用模糊逻辑控制器(FLC),主要优点是计算时间大量减少了。在这项研究工作中,模拟真实环境中使用VHDL 代码测试机器人小车,并在基于FPGA 的基础上进行测试。
3.停车场管理系统
停车系统的基本操作解释为︰当车辆进入停车场时,液晶屏显示内容提示,是否有停车位空缺。如果有空位,然后启动电机,打开停车场入口的门。射频模块用来传送和接收插槽可用性信息。根据射频模块的输出,LED 的发光。根据信息驱动程序可以停车。停车系统框图所示图 2.主机计算机作为控制单元。主要程序为FPGA。
图2:停车系统的结构图
3.1硬件执行
LCD为16引脚配置,Vss是接地引脚,Vcc是电源引脚,Vee用于控制对比度,RS为寄存器选择引脚,命令和数据根据RS引脚状态选择,E为使能信号。DB0-DB7是数据线15和16引脚用于调整背光。分配给FPGA的LCD的控制和数据线如图3所示。
图3(a):LCD与FPGA接口(引脚分配)
步进电机通过使用ULN 2003与FPGA连接。开发板的任何I / O端口可用于接口。在图中,开发板的DI/O端口用于与步进电机的连接。FPGA,ULN 2003和步进电机的引脚分配如图3(b)所示。
图3(b):步进电机与FPGA的接口(引脚分配)
射频模块:在本模块中,红外传输接收器用于检测车辆是否存在。红外传感器向HT12E编码器发送插槽状态。编码器由18引脚配置。并行数据由编码器转换为串行。收集数据在编码器的数据输出引脚。从数据输出引脚串行发射到RF发射器。在RF接收机处串行接收数据。HT12D解码器从RF接收器接收数据,然后将转换器串行转换回并行形式。HT12D解码器的数据引脚与Virtex 5CI/O端口信号引脚连接。
图3(c):HT12D解码器与FPGA的接口(引脚分配)平台:由IR传感器、HT12E编码器、RF模块、HT12D解码器和FPGA的LED组成,用于显示结果。软件模块:Xilinx版本12.4用于VHDL编码。接口:在提出的系统LCD中,步进电机和RF模型接口是用FPGA完成的。
3.2有限状态机的系统的运行
为了实施停车系统状态图构造。我们知道模拟系统的执行空间的可用性,电机旋转的门打开,标识和插槽的可用性信息。该系统包括︰
识别插槽
选择插槽
4.FPGA 实现
4.1 设计停车系统与状态机图
ASMD 图表是算法状态机图。显示停车系统流程图的工作方式。对于模拟模型,椭圆形的心形的盒子用来描述过去的状态,以及当前输入的输出。图中所示的图表ASMD 是停车场系统工作。在停车场入口处,液晶屏显示停车系统的状态。如果有可用空间,然后液晶显示可用空间其他液晶显示没有空间退出。根据空间状态马达旋转顺时针方向。后该鉴定单位标识的人。为新成员分配临时卡。经过鉴定,检查插槽状态。状态可以是填充、空或保留。在这个过程中使用射频传感器。
图4:停车场管理系统的ASMD图
4.2结果
检查门空间后,会打开步进电机。然后模拟时钟脉冲和重置应用会输入。碳纳米管和clkd 是信号。当重置高向低,步进电机转动。步进电机的仿真波形图4(a)所示。
图4(a)︰模拟步进电机放
图4(b)︰RTL 视图步进电机与LCD 接口技术如上图显示了RTL 视图步进电机与LCD 接口技术。clk 是系统时钟信号,rst 是控制信号,D(7:0) 是数据线,Z(3:0) 是步进电机的输出信号,E 是液晶显示器的使能信号,rs 是寄存器选择信号。rw 是读/写控制信号。
当门打开了时,识别过程开始。w,w1、w2、z、clk 和重置是投入。Out_1 是输出。Current_state 和next_state 描述了确定访客或新成员。Pr_st 和nx_st 显示人的标识。下图是仿真显示识别过程︰
图4(c):模拟识别模块
该插槽后检查过程开始了。这里的w1,w2、w3,w、clk,rest是输入的信号。Led_slotallot 和slotallot 是输出信号。当复位信号熄灭高向低,系统从空闲状态出来。在下图的模拟输入信号中,插槽15 是可用的。下图是仿真显示插槽分配功能。
图 4 (d)︰插槽分配特征的模拟
现在识别和插槽分配模块集成。clk,w3,car_enter,休息,w4,找到,a,w2 是输入的信号。确定new_member、fnd1、z、led、led_filled、led_reserv、cout 输出信号。根据输入信号,检查插槽状态。
图4(e)︰完整的停车系统的仿真结果
图5:RTL 视图停车系统
图上方显示32 插槽及RTL 视图停车系统。W2、W3、W4 是输入的信号,rest是控制信号,Clk 是系统时钟信号,Led,led_filled,led_reserv是输出信号,显示插槽的状态。识别和new_member 也显示结果识别模块的输出信号。
5.总结
目前,基于FPGA 泊车系统被采用Fsm Xilinx ISE 设计套件12.4。设计验证容量5 FPGA 工具包,状态机提高生产率、降低成本并缩短上市时间。基于FPGA 停车系统,给出了快速响应。所设计的系统可用于许多应用程序,可以轻松地提高插槽选项数目,利用设计系统使停车更方便。
附件2:外文原文(复印件)
Design and implementation of car parking system on FPGA ABSTRACT
As, the number of vehicles are increased day by day in rapid manner. It causes the problem of traffic congestion, pollution (noise and air). To overcome this problem.A FPGA based parking system has been proposed. In this paper, parking system is implemented using Finite State Machine modelling. The system has two main modules i.e. identification module and slot checking module. Identification module identifies the visitor. Slot checking module checks the slot status. These modules are modelled in HDL and implemented on FPGA. A prototype of parking system is designed with various interfaces like sensor interfacing, stepper motor and LCD.
KEYWORDS :Finite State Machine; Parking System; Virtex- 5;
1. INTRODUCTION
Vehicle traffic congestion is a worldwide problem. In recent years, efforts have been made to introduce a method to reduce parking problems such as congestion, accidents and hazards.
Figure1:Congestion Trends in Urban Area
As shown in figure 1 congestion has clearly grown year by year. It creates a
number of problems. Congestion used to mean it took longer to get to from work in the "rush hour".Parking systems can also take advantage of innovative technologies in order to improve the ease and convenience of paying for parking. Now a day, Smart cards minimize transaction time by allowing a user to simply wave their card in front of a reader. Mobile devices can also be used in payment transactions. Public utilities need a parking system that can function efficiently and be integrated with the other urban city utilities. For allotment of parking slots there is no proper way thus parking management system fails in coordination and centralizing the information for an effective system. To avoid these problems, a design of an intelligent parking system is proposed,which will be implemented on FPGA to check its functionality.
Recently, a reconfigurable FPGA is efficient method to implement a design, because FPGA provides a compromise between general-purpose processors and ASIC. The FPGA based design is also more flexible, programmable and can be
re-programmed. FPGA based design can easily be modified by modifying design’s software part.
2. RELATED WORK
Gongjun Yan et.al, describes a novel, secure, and intelligent parking system (Smart Parking) based on secured wireless network and sensor communication. High parking space utilization and fast free spot finding time are the result of proposed research. Soh Chun Khang et.al, presents a parking system in which driver comes to know about the space availability in the parking lot with the help of SMS service. Driver can resend SMS in order to request new space if the previous one is filled. Driver can find nearest space for parking using wireless mobile based car parking system. Results, shows that the system efficiently allocates the slots and utilizes the full parking space. Ankit Gupta et.al, describes an efficient car parking algorithm for ackerman steering configuration. This algorithm uses geometric calculations for path planning. Result shows a fast, efficient and safer parking system]. Hua chun tan et.al, proposed an efficient car searching technique for larger parking lot. In this paper, cameras are installed in roads nearby parking lot and information regarding car like colour and license plate recognition is captured and saved in the database. S. V.
Srikanth et.al, proposed a parking system which eliminates problems regarding finding vacant slot for parking. Author uses wireless technology to enhance parking efficiency. Gongjun Yan et.al, proposed NOTICE based parking system. In this parking system, drivers can check and reserve the slot for parking. For security purposes encryption/decryption techniques are used. Simulation results are highly efficient. Insop Song et.al proposed FPGA based parking system using fuzzy logic controller (FLC). Reduction in computation time is its advantage. In this research work a robot car is made and tested in real environment using VHDL code. Design is simulated and tested on FPGA.
3. PROPOSED PARKING SYSTEM
The basic operation of the parking system is explained as: When a vehicle enters in the parking lot, LCD displays, if the space is available in parking lot or not.If the space is available then stepper motor rotates and door opens for vehicle entrance. RF module is used to transmit and receive slot availability information.According to RF Module’s output,LED’s glow.According to information driver can park the vehicle.Block diagram for the parking system is shown in figure 2.Host computer acts as control unit.Once host computer program the FPGA.
Figure 2: Block diagram of the parking system
3.1 Hardware implementation
LCD is of 16 pin configuration. Vss is ground pin. Vcc is power supply pin.Vee is used to control the contrast. RS is register select https://www.360docs.net/doc/d36342339.html,mand and data is select according to RS pin status.E is enable signal. DB0-DB7 are data lines.15 and 16 pins
are used to adjust backlight.Control and data lines of LCD assigned to FPGA are shown in figure 3.
Figure 3(a):LCD interfacing with FPGA(Pin assignment) Stepper motor interfaced with FPGA by using ULN 2003. Any I/O port of Development Boardcan be used for interfacing. Here, D I/O port of Development Board is used for interfacing withstepper motor. Pin assignment of FPGA, ULN 2003, and stepper motor is shown in figure 3(b).
Figure 3(b):stepper motor interfacing with FPGA(Pin assignment) RF Module: In this module IR trans-receiver pair is used to detect vehicle presence. IR sensors transmit slot’s status to HT12E encoder. Encoder consists of 18 pin configuration. Parallel data convert into serial by encoder. Data is collected at data
out pin of encoder. From data out pin data serially transmit towards RF transmitter. Data serially received at RF receiver. HT12D decoder receiver’s data from RF receiver, then converter back serial to parallel form. HT12D decoder’s data pins are interfaced with Virtex 5 C I/O port signal pins.
Figure 3(c):HT12D Decoder interfacing with FPGA(Pin assignment) Platform: consisting of IR sensors, HT12E encoder, RF module, HT12D decoder and LEDs of FPGA are used to display results. Software Module: Xilinx version 12.4 is used for VHDL coding. Interfacing: In proposed system LCD, Stepper motor and RF models interfacing is done with FPGA.
3.2 Finite state machine for the operation of the system
In order to implement parking system a state diagram is constructed. As we know that the proposed system performs space availability, motor rotation for door opening, identification and slot availability information. The system includes:
Identification
Slot Selection
4. FPGA IMPLEMENTATION
4.1 Designing of parking system with State Machine Diagram
ASMD chart is Algorithm State Machine Diagram. This shows the working of parking system in the form of a flow chart. For the proposed model, oval shaped boxes are used to describe the output that depends upon past state as well as present input. The ASMD chart shown in figure 4 gives working of the car parking system. At
the entrance of parking area, LCD displays the status of parking system. If space is available then LCD displays space available else LCD displays no space exit. According to space status motor rotates in clockwise direction. After that identification unit identifies the person. For new member temporary card is allotted. After identification, slot status is checked. Status can be filled, empty or reserved. RF sensors are used in this process.
Figure 4:ASMD char for parking system
4.2 Results
After space checking door will open with the help of stepper motor. Here in simulation clk pulse and reset is applied as an input. Cnt and clkd are signals. When reset goes high-to-low, stepper motor rotates. Simulation wave forms of stepper motor are shown in figure 4(a)
Figure 4(a):Simulation of stepper motor ratation
Figure 4(b) :RTL view of stepper motor and LCD interfacing
Figure 4(b):RTL view of stepper motor and LCD interfacing Figure above shows the RTL view of stepper motor and LCD interfacing.
clk is system clock signal. rst is control signal. D(7:0) are data lines. Z(3:0) is output signal of stepper motor. E is enable signal of LCD. rs is register select signal. rw is read/write controlsignal.
When door opened, identification process starts. w, w1, w2, z, clk and reset are inputs. Out_1 is output. Current_state and next_state describes visitor is identified or a new member has come. Pr_st and nx_st shows person which is identified. Following simulation shows identification process:
Figure 4(c):Simulation of identification module
After that slot checking procedure starts. Here w1, w2, w3, w, clk, reset are input signals. Led_slotallot and slotallot are output signals. When reset signal goes high-to-low, system comes out from idle state. According to input signals in following simulation slot 15 is available. Following simulation shows slot allotment feature.
Figure 4(d):Simulation of slot allotment feature
Now identification and slot allotment modules are integrated. clk, w3, car_enter,rest,w4,find,a,w2 are input signals.Identified,new_member,fnd1,z, led,led_filled,led_reserv,cout are output signals. According to input signal, slot status is checked.
Figure 4(e):Simulation results of complete parking system
Figure 5:RTL view of parking system
Figure above shows the 32 slot involving RTL view parking system.W2, W3, W4 are input signals. Reset is control signal.Clk is system clock signal. Led, led_filled, led_reserv are output signals,which shows slot status.Identified and new_member are also output signals,which shows result of identification module.
5. CONCLUSION
The present FPGA based parking system is implemented using FSMs with the help of Xilinx ISE Design Suite 12.4.The design is verified on Virtex 5 FPGA kit.State machines increase productivity, reduces cost,and accelerates time to market. FPGA based parking system,gives fast response.The designed system can be used for many applications and can easily enhance the number of slot selections.Parking
becomes easy by the use of Designed system.
毕业设计外文翻译资料
外文出处: 《Exploiting Software How to Break Code》By Greg Hoglund, Gary McGraw Publisher : Addison Wesley Pub Date : February 17, 2004 ISBN : 0-201-78695-8 译文标题: JDBC接口技术 译文: JDBC是一种可用于执行SQL语句的JavaAPI(ApplicationProgrammingInterface应用程序设计接口)。它由一些Java语言编写的类和界面组成。JDBC为数据库应用开发人员、数据库前台工具开发人员提供了一种标准的应用程序设计接口,使开发人员可以用纯Java语言编写完整的数据库应用程序。 一、ODBC到JDBC的发展历程 说到JDBC,很容易让人联想到另一个十分熟悉的字眼“ODBC”。它们之间有没有联系呢?如果有,那么它们之间又是怎样的关系呢? ODBC是OpenDatabaseConnectivity的英文简写。它是一种用来在相关或不相关的数据库管理系统(DBMS)中存取数据的,用C语言实现的,标准应用程序数据接口。通过ODBCAPI,应用程序可以存取保存在多种不同数据库管理系统(DBMS)中的数据,而不论每个DBMS使用了何种数据存储格式和编程接口。 1.ODBC的结构模型 ODBC的结构包括四个主要部分:应用程序接口、驱动器管理器、数据库驱动器和数据源。应用程序接口:屏蔽不同的ODBC数据库驱动器之间函数调用的差别,为用户提供统一的SQL编程接口。 驱动器管理器:为应用程序装载数据库驱动器。 数据库驱动器:实现ODBC的函数调用,提供对特定数据源的SQL请求。如果需要,数据库驱动器将修改应用程序的请求,使得请求符合相关的DBMS所支持的文法。 数据源:由用户想要存取的数据以及与它相关的操作系统、DBMS和用于访问DBMS的网络平台组成。 虽然ODBC驱动器管理器的主要目的是加载数据库驱动器,以便ODBC函数调用,但是数据库驱动器本身也执行ODBC函数调用,并与数据库相互配合。因此当应用系统发出调用与数据源进行连接时,数据库驱动器能管理通信协议。当建立起与数据源的连接时,数据库驱动器便能处理应用系统向DBMS发出的请求,对分析或发自数据源的设计进行必要的翻译,并将结果返回给应用系统。 2.JDBC的诞生 自从Java语言于1995年5月正式公布以来,Java风靡全球。出现大量的用java语言编写的程序,其中也包括数据库应用程序。由于没有一个Java语言的API,编程人员不得不在Java程序中加入C语言的ODBC函数调用。这就使很多Java的优秀特性无法充分发挥,比如平台无关性、面向对象特性等。随着越来越多的编程人员对Java语言的日益喜爱,越来越多的公司在Java程序开发上投入的精力日益增加,对java语言接口的访问数据库的API 的要求越来越强烈。也由于ODBC的有其不足之处,比如它并不容易使用,没有面向对象的特性等等,SUN公司决定开发一Java语言为接口的数据库应用程序开发接口。在JDK1.x 版本中,JDBC只是一个可选部件,到了JDK1.1公布时,SQL类包(也就是JDBCAPI)
公路几何设计与交通安全(正式版)
文件编号:TP-AR-L3113 In Terms Of Organization Management, It Is Necessary To Form A Certain Guiding And Planning Executable Plan, So As To Help Decision-Makers To Carry Out Better Production And Management From Multiple Perspectives. (示范文本) 编订:_______________ 审核:_______________ 单位:_______________ 公路几何设计与交通安 全(正式版)
公路几何设计与交通安全(正式版) 使用注意:该安全管理资料可用在组织/机构/单位管理上,形成一定的具有指导性,规划性的可执行计划,从而实现多角度地帮助决策人员进行更好的生产与管理。材料内容可根据实际情况作相应修改,请在使用时认真阅读。 一、概论 1. 研究交通安全的重要性 近几年来,随着公路建设的发展,公路交通安全问题越来越受到人们的关注。交通部《公路勘察设计典型示范工程咨询示范要点》明确提出了“安全、环保、舒适、和谐”的设计理念。交通部副部长冯正霖强调,在交通发展的新理念上,勘察设计工作必须做到“六个坚持,六个树立”,第一个即是“坚持以人为本,树立安全至上的理念”,可见安全问题已经被提到首要重要地位了。因此,在大力发展交通事业的同时,必须将“安全意识”引入道路的设计中,通过
完善的道路设计,来有效地控制交通安全,减少交通事故,减少经济损失。 2.公路几何设计对交通安全的重要性 公路几何线形设计要考虑公路平面线形、纵断面线形两种线形以及横断面的组成相协调,还要注意视距的畅通等等。确定公路几何线形时,在考虑地形、地物、土地的合理利用及环境保护因素时,要充分利用公路几何组成部分的合理尺寸和线形组合,从施工、养护、经济、交通运行等角度出发,保证平面、纵断面、横断面的组成相协调。线形的好坏,对交通流的安全具有极其重要的作用,如果公路线形不合理,则会降低公路通行能力,造成运输者时间和经济上的损失,而且更不能容忍的是会诱发大大小小、各种各样的交通事故。 合理、优质的公路设计,可以提供清晰醍目的行
施工组织设计外文翻译
摘要: 建筑工程在施工过程中,施工组织方案的优劣不仅直接影响工程的质量,对工期及施工过程中的人员安全也有重要影响。施工组织是项目建设和指导工程施工的重要技术经济文件。能调节施工中人员、机器、原料、环境、工艺、设备、土建、安装、管理、生产等矛盾,要对施工组织设计进行监督和控制,才能科学合理的保证工程项目高质量、低成本、少耗能的完成。 关键词: 项目管理施工组织方案重要性 施工组织设计就是对工程建设项目整个施工过程的构思设想和具体安排,是施工组织管理工作的核心和灵魂。其目的是使工程速度快、质量好、效益高。使整个工程在施工中获得相对的最优效果。 1.编制施工组织设计重要性的原因 建筑工程及其施工具有固定性与流动性、多样性与单件性、形体庞大与施工周期长这三对特点。所以,每一建筑工程的施工都必须进行施工组织设计。这是因为:其它一般工业产品的生产都有着自己固定的、长期适用的工厂。而建筑施工具有流动性的特点,不可能建立这样的工厂,只能是当每一个建筑工程施工时,建立一个相应的、临时性的,如同工厂作用性质的施工现场准备,即工地。施工单件性特点与施工流动性特点,决定了每一建筑工程施工都要选择相应的机具和劳动力组织。选择施工方法、拟定施工技术方案及其劳动力组织和机具配置,统称为施工作业能力配置。施工周期的特点,决定了各种劳动力、机具和众多材料物资技术的供应时间也比较长,这就产生了与施工总进度计划相适应的物资技术的施工组织设计内容。由此可见,施工组织设计在项目管理中是相当重要的。 2.施工组织设计方案的重要性 建筑产品作为一种商品,在项目管理中工程质量在整个施工过程中起着极其重要的作用。工程建设项目的施工组织设计与其工程造价有着密切的关系。施工组织设计基本的内容有:工程概况和施工条件的分析、施工方案、施工工艺、施工进度计划、施工总平面图。还有经济分析和施工准备工作计划。其中,施工方案及施工工艺的确定更为重要,如:施工机械的选择、水平运输方法的选择、土方的施工方法及主体结构的施工方法和施工工艺的选择等等,均直接影响着工程预算价格的变化。在保证工程质量和满足业主使用要求及工期要求的前提下,优化施工方案及施工工艺是控制投资和降低工程项目造价的重要措施和手段。 2.1施工组织方案在很大程度上影响着工程质量,因此合理的施工组织方案不仅是确保工程顺利完成的基础,也是工程安全的依据。施工组织设计是建筑工
土木工程外文翻译隧道与地下空间技术
隧道与地下空间技术 2006 年 5-7 月刊,第 21 期,章节 3-4,第 332 页 釜山——巨济的交通系统:沉管隧道开创新局面 1 1Wim Janssen Peter de Haas Young-Hoon Yoon 荷兰隧道工程顾问:大宇工程建设公司釜山—巨济交通线隧道工程技术顾问 韩国大宇工程建设公司摘要 釜山—巨济交通系统将会为釜山和巨济两岛上的大城市提供一条道路连接。该沉管隧道有许多特点:长度达到千米,处于水下 35 米处,海况条件严峻、地基土较为软弱和线型要求较高。基于以上诸多特点,隧道的设计和建造面临着巨大的挑战。可以预见的是这项工程将会开创沉管隧道施工技术的新局面。本文突出论述了这些特点以及阐述在土木和结构方面的问题。1.工程简介 釜山是韩国的第二大城市和一座重要的海港。它位于韩国的东南部,其南面和东面朝向朝鲜海峡同时在釜山北部山势较为陡峭。该市发展迅速,近年来的人口增长超过 370 万(总计 460 万人)。人口密度达到 4850 人/km2,约为香港的 3/4。釜山市的进一步发展由于其所处的地理位置而受到限制。釜山—巨济交通系统在釜山和巨济岛之间创造了一条直接的联系线,以从客观上满足釜山的城市扩展,在巨济岛上发展工业区,以及为釜山市民在较短的行车距离内增加休闲娱乐的去处。巨济岛西侧目前已经与朝鲜半岛相连,在本项连接工程完工之后,从釜山市到巨济岛的驾车时间将由原来的 2 小时缩短为现在的 45 分钟。釜山—巨济交通系统将在巨济岛与 Gaduk 岛之间提供一条连接,使其成为连接釜山新港地区至巨济岛的双重高速公路体系的一部分。这一系统总计公里长,穿越海峡并将Daejuk Jungjuk 和 Jeo 三个无人小岛连接在一起。原则上该系统由一条长度为 3240m 的双向四车道沉管隧道和两座主跨 475,两边跨 230m 的斜拉桥组成。2.规划组织该项目是作为一个公私合作,共同建设的工程,GK 交通系统公司可获得设计、施工和运营的特许权,经营期限为 40 年。特许权基于该系统设计理念的一个环节。GK 交通系统公司由大宇工程建设公司领衔的 7 家特许权法人组成。TEC/Halcrow 等合资公司作为技术顾问,从工程开始便参与该项工程。Halcrow 与 TEC 两个合资公司分别负责关于桥梁和隧道建设方面的技术问题。永久设施的设计工作已接近完成,后续的建设的准备工作也已经开始。图 1. 工程地理位置图 2. 空中鸟瞰效果图设计要求和基本闲置因素该项目将 Gaduk 岛与巨济岛经 Daejuk Jungjuk and Joe island 三个小岛连接在一起,基本布局由三条航道的要求决定。位于 Gaduk 岛和 Daejuk 岛之间的主航道宽 1800m, 18m。 深由于这条航道没有官方的水深规定,因此选择以隧道的方式穿越成为一种可行的方案。另外两条位于 Jungjuk—Jeo 岛和 Joe—巨济岛的次级航道,最小宽度分别为435m 和 404m,各自的通航净空要求分别为 52m 和 36m。两条次级航道的水深均为 16m。鉴于 Daejuk 岛和 Gaduk 岛之间相对较为陡峭的海岸,开挖作业又是在海床以下 25至 30 米处,这就使得工程无法满足两岛之间的对准开挖。而为了驾驶的舒适与安全又不得不延长梯度线和坡长。因此,将穿越该水域的沉管隧道设置在略低于海床平面成为一个合理的选择。图 3. 线路纵剖面图岩土条件 地层在隧道线路方向上呈现出不同但是在纵向自上而下依次为典型的海洋粘土、海砂、砾卵石和海床基岩。 在沉管隧道沿线的海床主要以海洋粘土为主,除了在海岸线附近露出地表的海床、
控制系统基础论文中英文资料外文翻译文献
控制系统基础论文中英文资料外文翻译文献 文献翻译 原文: Numerical Control One of the most fundamental concepts in the area of advanced manufacturing technologies is numerical control (NC).Prior to the advent of NC, all machine tools were manual operated and controlled. Among the many limitations associated with manual control machine tools, perhaps none is more prominent than the limitation of operator skills. With manual control, the quality of the product is directly related to and limited to the skills of the operator . Numerical control represents the first major step away from human control of machine tools. Numerical control means the control of machine tools and other manufacturing systems though the use of prerecorded, written symbolic instructions. Rather than operating a machine tool, an NC technician writes a program that issues operational instructions to the machine tool, For a machine tool to be numerically controlled , it must be interfaced with a device for accepting and decoding the p2ogrammed instructions, known as a reader. Numerical control was developed to overcome the limitation of human operator , and it has done so . Numerical control machines are more accurate than manually operated machines , they can produce parts more uniformly , they are faster, and the long-run tooling costs are lower . The development of NC led to the development of several other innovations in manufacturing technology: 1.Electrical discharge machining. https://www.360docs.net/doc/d36342339.html,ser cutting. 3.Electron beam welding.
软件开发概念和设计方法大学毕业论文外文文献翻译及原文
毕业设计(论文)外文文献翻译 文献、资料中文题目:软件开发概念和设计方法文献、资料英文题目: 文献、资料来源: 文献、资料发表(出版)日期: 院(部): 专业: 班级: 姓名: 学号: 指导教师: 翻译日期: 2017.02.14
外文资料原文 Software Development Concepts and Design Methodologies During the 1960s, ma inframes and higher level programming languages were applied to man y problems including human resource s yste ms,reservation s yste ms, and manufacturing s yste ms. Computers and software were seen as the cure all for man y bu siness issues were some times applied blindly. S yste ms sometimes failed to solve the problem for which the y were designed for man y reasons including: ?Inability to sufficiently understand complex problems ?Not sufficiently taking into account end-u ser needs, the organizational environ ment, and performance tradeoffs ?Inability to accurately estimate development time and operational costs ?Lack of framework for consistent and regular customer communications At this time, the concept of structured programming, top-down design, stepwise refinement,and modularity e merged. Structured programming is still the most dominant approach to software engineering and is still evo lving. These failures led to the concept of "software engineering" based upon the idea that an engineering-like discipl ine could be applied to software design and develop ment. Software design is a process where the software designer applies techniques and principles to produce a conceptual model that de scribes and defines a solution to a problem. In the beginning, this des ign process has not been well structured and the model does not alwa ys accurately represent the problem of software development. However,design methodologies have been evolving to accommo date changes in technolog y coupled with our increased understanding of development processes. Whereas early desig n methods addressed specific aspects of the
公路几何设计与交通安全(最新版)
公路几何设计与交通安全(最 新版) Safety work has only a starting point and no end. Only the leadership can really pay attention to it, measures are implemented, and assessments are in place. ( 安全管理 ) 单位:______________________ 姓名:______________________ 日期:______________________ 编号:AQ-SN-0251
公路几何设计与交通安全(最新版) 一、概论 1.研究交通安全的重要性 近几年来,随着公路建设的发展,公路交通安全问题越来越受到人们的关注。交通部《公路勘察设计典型示范工程咨询示范要点》明确提出了“安全、环保、舒适、和谐”的设计理念。交通部副部长冯正霖强调,在交通发展的新理念上,勘察设计工作必须做到“六个坚持,六个树立”,第一个即是“坚持以人为本,树立安全至上的理念”,可见安全问题已经被提到首要重要地位了。因此,在大力发展交通事业的同时,必须将“安全意识”引入道路的设计中,通过完善的道路设计,来有效地控制交通安全,减少交通事故,减少经济损失。 2.公路几何设计对交通安全的重要性
公路几何线形设计要考虑公路平面线形、纵断面线形两种线形以及横断面的组成相协调,还要注意视距的畅通等等。确定公路几何线形时,在考虑地形、地物、土地的合理利用及环境保护因素时,要充分利用公路几何组成部分的合理尺寸和线形组合,从施工、养护、经济、交通运行等角度出发,保证平面、纵断面、横断面的组成相协调。线形的好坏,对交通流的安全具有极其重要的作用,如果公路线形不合理,则会降低公路通行能力,造成运输者时间和经济上的损失,而且更不能容忍的是会诱发大大小小、各种各样的交通事故。 合理、优质的公路设计,可以提供清晰醍目的行车方向,提供足够的视距及其他信息,能够符合驾驶人员普遍期望的设计效果。在公路设计中,影响交通安全的因素虽然是多方面的(主要包括公路几何线形、路面设计、安全设施、构造物位置及形状设计),而公路几何设计对公路的安全性则起到先决的作用,一旦通过选线确定公路走向并由此确定几何线形,则其他项目几乎都已经随选定的几何线形得以确定,其他如桥涵构造物的位置、安全设施等几乎只是
施工组织设计外文翻译
XXXXXXXXX 毕业设计(论文)外文翻译 学生姓名: 院(系): 专业班级: 指导教师: 完成日期:
施工组织设计的重要性 摘要: 建筑工程在施工过程中,施工组织方案的优劣不仅直接影响工程的质量,对工期及施工过程中的人员安全也有重要影响。施工组织是项目建设和指导工程施工的重要技术经济文件。能调节施工中人员、机器、原料、环境、工艺、设备、土建、安装、管理、生产等矛盾,要对施工组织设计进行监督和控制,才能科学合理的保证工程项目高质量、低成本、少耗能的完成。 关键词: 项目管理施工组织方案重要性 施工组织设计就是对工程建设项目整个施工过程的构思设想和具体安排,是施工组织管理工作的核心和灵魂。其目的是使工程速度快、质量好、效益高。使整个工程在施工中获得相对的最优效果。 1.编制施工组织设计重要性的原因 建筑工程及其施工具有固定性与流动性、多样性与单件性、形体庞大与施工周期长这三对特点。所以,每一建筑工程的施工都必须进行施工组织设计。这是因为:其它一般工业产品的生产都有着自己固定的、长期适用的工厂。而建筑施工具有流动性的特点,不可能建立这样的工厂,只能是当每一个建筑工程施工时,建立一个相应的、临时性的,如同工厂作用性质的施工现场准备,即工地。施工单件性特点与施工流动性特点,决定了每一建筑工程施工都要选择相应的机具和劳动力组织。选择施工方法、拟定施工技术方案及其劳动力组织和机具配置,统称为施工作业能力配置。施工周期的特点,决定了各种劳动力、机具和众多材料物资技术的供应时间也比较长,这就产生了与施工总进度计划相适应的物资技术的施工组织设计内容。由此可见,施工组织设计在项目管理中是相当重要的。 2.施工组织设计方案的重要性 建筑产品作为一种商品,在项目管理中工程质量在整个施工过程中起着极其重要的作用。工程建设项目的施工组织设计与其工程造价有着密切的关系。施工组织设计基本的内容有:工程概况和施工条件的分析、施工方案、施工工艺、施工进度计划、施工总平面图。还有经济分析和施工准备工作计划。其中,施工方案及施工工艺的确定更为重要,如:施工机械的选择、水平运输方法的选择、土方的施工方法及主体结构的施工方法和施工工艺的选择等等,均直接影响着工程预算价格的变化。在保证工程质量和满足业主使用要求及工期要求的前提下,优化施工方案及施工工艺是控制投资和降低工程项目造价的重要措施和手段。 2.1施工组织方案在很大程度上影响着工程质量,因此合理的施工组织方案 不仅是确保工程顺利完成的基础,也是工程安全的依据。施工组织设计是建筑工程设计文件的重要组成部分,是编制工程投资概预算的主要依据和编制招投标文件的
桥梁结构设计外文文献翻译
桥梁结构设计外文文献翻译 (文档含中英文对照即英文原文和中文翻译) 结构设计 Augustine J.Fredrich 摘要:结构设计是选择材料和构件类型,大小和形状以安全有用的样式承担荷载。一般说来,结构设计暗指结构物如建筑物和桥或是可移动但有刚性外壳如船体和飞机框架的工厂稳定性。设计的移动时彼此相连的设备(连接件),一般被安排在机械设计领域。 关键词:结构设计结构分析结构方案工程要求 Abstract: Structure design is the selection of materials and member type ,size, and configuration to carry loads in a safe and serviceable fashion .In general ,structural design implies the engineering of stationary objects such as buildings and bridges ,or objects that maybe mobile but have a rigid shape such as ship hulls and aircraft frames. Devices with parts planned to move with relation to each other(linkages) are generally assigned to the area of mechanical . Key words: Structure Design Structural analysis structural scheme Project requirements Structure Design Structural design involved at least five distinct phases of work: project requirements, materials, structural scheme, analysis, and design.
基于单片机的步进电机控制系统设计外文翻译
毕业设计(论文)外文资料翻译 学院:机械工程学院 专业:机械设计制造及其自动化 姓名: 学号:XXXXXXXXXX 外文出处:《Computational Intelligence and (用外文写)Design》 附件: 1.外文资料翻译译文;2.外文原文。 注:请将该封面与附件装订成册。
附件1:外文资料翻译译文 基于微型计算机的步进电机控制系统设计 孟天星余兰兰 山东理工大学电子与电气工程学院 山东省淄博市 摘要 本文详细地介绍了一种以AT89C51为核心的步进电机控制系统。该系统设计包括硬件设计、软件设计和电路设计。电路设计模块包括键盘输入模块、LED显示模块、发光二极管状态显示和报警模块。按键可以输入设定步进电机的启停、转速、转向,改变转速、转向等的状态参数。通过键盘输入的状态参数来控制步进电机的步进位置和步进速度进而驱动负载执行预订的工作。运用显示电路来显示步进电机的输入数据和运行状态。AT89C51单片机通过指令系统和编译程序来执行软件部分。通过反馈检测模块,该系统可以很好地完成上述功能。 关键词:步进电机,AT89C51单片机,驱动器,速度控制 1概述 步进电机因为具有较高的精度而被广泛地应用于运动控制系统,例如机器人、打印机、软盘驱动机、绘图仪、机械式阀体等等。过去传统的步进电机控制电路和驱动电路设计方法通常都极为复杂,由成本很高而且实用性很差的电器元件组成。结合微型计算机技术和软件编程技术的设计方法成功地避免了设计大量复杂的电路,降低了使用元件的成本,使步进电机的应用更广泛更灵活。本文步进电机控制系统是基于AT89C51单片机进行设计的,它具有电路简单、结构紧凑的特点,能进行加减速,转向和角度控制。它仅仅需要修改控制程序就可以对各种不同型号的步进电机进行控制而不需要改变硬件电路,所以它具有很广泛的应用领域。 2设计方案 该系统以AT89C51单片机为核心来控制步进电机。电路设计包括键盘输入电路、LED显示电路、发光二极管显示电路和报警电路,系统原理框图如图1所示。 At89c51单片机的P2口输出控制步进电机速度的时钟脉冲信号和控制步进电机运转方向的高低电平。通过定时程序和延时程序可以控制步进电机的速度和在某一
本科毕业设计方案外文翻译范本
I / 11 本科毕业设计外文翻译 <2018届) 论文题目基于WEB 的J2EE 的信息系统的方法研究 作者姓名[单击此处输入姓名] 指导教师[单击此处输入姓名] 学科(专业 > 所在学院计算机科学与技术学院 提交日期[时间 ]
基于WEB的J2EE的信息系统的方法研究 摘要:本文介绍基于工程的Java开发框架背后的概念,并介绍它如何用于IT 工程开发。因为有许多相同设计和开发工作在不同的方式下重复,而且并不总是符合最佳实践,所以许多开发框架建立了。我们已经定义了共同关注的问题和应用模式,代表有效解决办法的工具。开发框架提供:<1)从用户界面到数据集成的应用程序开发堆栈;<2)一个架构,基本环境及他们的相关技术,这些技术用来使用其他一些框架。架构定义了一个开发方法,其目的是协助客户开发工程。 关键词:J2EE 框架WEB开发 一、引言 软件工具包用来进行复杂的空间动态系统的非线性分析越来越多地使用基于Web的网络平台,以实现他们的用户界面,科学分析,分布仿真结果和科学家之间的信息交流。对于许多应用系统基于Web访问的非线性分析模拟软件成为一个重要组成部分。网络硬件和软件方面的密集技术变革[1]提供了比过去更多的自由选择机会[2]。因此,WEB平台的合理选择和发展对整个地区的非线性分析及其众多的应用程序具有越来越重要的意义。现阶段的WEB发展的特点是出现了大量的开源框架。框架将Web开发提到一个更高的水平,使基本功能的重复使用成为可能和从而提高了开发的生产力。 在某些情况下,开源框架没有提供常见问题的一个解决方案。出于这个原因,开发在开源框架的基础上建立自己的工程发展框架。本文旨在描述是一个基于Java的框架,该框架利用了开源框架并有助于开发基于Web的应用。通过分析现有的开源框架,本文提出了新的架构,基本环境及他们用来提高和利用其他一些框架的相关技术。架构定义了自己开发方法,其目的是协助客户开发和事例工程。 应用程序设计应该关注在工程中的重复利用。即使有独特的功能要求,也
道路规划与几何设计课程设计
道路规划与几何设计课程设计 设计名称公路勘测课程设计 副标题 系名称土木工程 专业道路与交通工程 学生姓名学号 课程设计起讫时间: 自2012 年5月21 日至2012 年6月3 日共 2 周指导教师签名高怀龙2012年月日
目录 设计说明书··························直线、曲线及转角一览表··············凹、凸曲线计算····················路拱计算···························路线平面图·························路线纵断面图·······················路基标准横断面图···················一般路堤﹑一般路堑标准断面图········一般路基,超高路基标准断面图········
设计说明 一.设计路段的基本情况 本路段为天水——陇西公路改建工程中的一段(下山线),长约3km,其基本资料来源于通广公路勘察设计有限公司设计的该公路施工图设计文件。 本路段穿越天水武山、甘谷及陇西等市县,属甘肃陇中黄土覆盖区,沿线按三级公路标准改建。由于本项目属西部通县公路工程,建设资金紧张,工程主要以加铺沥青路面为主,重点完善路基排水、防护等设施,路线走向及线形不做大的调整,个别指标仍不满足现行标准规范要求。 本路段设计车速30km/h,平曲线极限最小半径30m,一般最小半径65m,不设超高最小半径350m,最大纵坡8%,路基宽度7.5m,行车道宽度6.0m,路肩宽度0.75m,路拱横坡度2%,路肩横坡度3%,超高绕内边轴旋转,三类加宽。 二.设计方法及公式 1)直线、曲线及转角一览表设计 在直线、曲线及转角一览表设计中,我们参照教科书《道路勘测与设计》P165页中的直线、曲线及转角表 设计的。其中根据资料D中的平面设计资料,在给出转 角,圆曲线半径,缓和曲线长的情况下,求出各自交点号 的切线长,外矢距,圆曲线长,曲线总长,直线段长,交 点间距,校正值,及平曲线中各个直缓、缓园、园缓、缓
施工组织设计外文文献翻译最新译文
文献出处: Phillip Yetton. The Study of Construction Organization Design [J]. International Journal of Project Management, 2015, 9(2): 33-43. 原文 The Study of Construction Organization Design Author: Phillip Yetton Abstract Building construction is a complex work, huge building products, the production cycle is long, is a collection of architectural art, architecture, function, structure, decoration, water supply, power supply, intelligent system for a wind. Need to complete a project unit, type of work well together, and in the process of implementing, also under the influence of various subjective and objective conditions around. In order to meet the quality, cost, time limit for a project, under the premise of safety goal task to complete a project, must according to the requirement of the construction unit and the characteristics of the proposed construction project, the various raw materials on the basis of full investigation, compile an used to guide the whole process of technology, economy and management of project construction comprehensive document, this document is the construction organization Keywords: Construction; Organization design; Project cost 1 Introduction Construction organization design is a construction project for the object establishment, to guide the project bidding, construction contracts, construction preparation, construction installation until the whole process of the final acceptance of the technology, economy and management comprehensive document, is to ensure that project smooth implementation effective programmatic document. Construction organization design is proper or not, will directly relate to the quality of the proposed construction project, cost, time limit, safety, etc. The smooth realization of the intended target. With the development of The Times, modern engineering project scale and the demand is higher and higher, project management has become increasingly complex, and the construction organization design also put forward higher requirements. The construction organization design, construction organization
隧道施工外文翻译
超大型土压平衡式盾构在 隧道施工中引发的地面沉降分析 1 摘要: 使用盾构法进行隧道施工会导致隧道周边的土体位移和地面的沉降,这就使得估测土体的位移和沉降变得尤为重要了。由于之前已做过很多研究,所以在该领域已取得突破。然而,对于超大型土压平衡式盾构机在隧道施工中所引发土体移位与沉降的研究还很罕见,其原因是该工法在世界范围内很少被应用,但近年来,该工法已经在城市地下铁道运输结构的施工中有所应并且前景广阔。由于高含水地层中的切应力作用会使土体中产生超孔隙水压力。在盾构停止推挤土体后孔隙水会逐渐消散,土压力也会逐渐减小。而且,土质移位和地面沉降将会发生。与小型盾构机相比,上述现象在超大型土压平衡式盾构机施工中更为明显,原因就是它超大的开挖面面积。通过对监测数据和工程实际的隧道参数进行分析,可以发现盾构隧道施工参数对开挖面上土压力的影响规律和超孔隙水压力的大小。而且,通过调整隧道的开挖参数,可以减小地面沉降。盾构尾部的空隙填充量可以由反演算法与镜像法来确定。可以依据空隙量来调整注浆量以减少地面的沉降量。在上海的两个工程实例证明了这种方法在以后工程施工中的价值。 2 关键词 超大型土压平衡式盾构、盾构法隧道施工、地面沉降、镜像法 3 概述 盾构法隧道施工因其低噪音和对路面交通影响小的优点而被广泛的应用在城市地下隧道工程的施工中。但是,对原状土的扰动和土层损失将不会导致土层形变和地面沉降,而且会破坏建筑与结构的稳定。盾构法施工已被广泛研究以至于取得了许多的瞩目成就。但是超大型土压平衡式盾构在世界范围内很少被使
用,而且盾构施工过程中的土体沉降也少有被研究。在以往对其他类型盾构隧道施工研究中,有两方面被作为主要的研究对象,即开挖面和盾构尾部。首先,现在对于开挖面失效模式的研究重点主要在破坏区形状方面而不是在土压力和超孔隙水压力方面。实际上,后来提到的两方面对于地面沉降是很重要的,特别是在砂土和粉土地层中。相比于小型盾构机,超大型土压平衡式盾构机的大断面开挖会引发土压力和超孔隙水压力的更大影响。通过研究这两方面因素,超大型土压平衡式盾构开挖面的土压平衡机质会被揭示出来。其次,在盾构隧道的尾部后端形成的空隙会在施工过程中被同步注浆。但是,在绝大多数情况下,空隙是不会被完全充填的,之后则会导致地面沉降。当凝结开始后,同步注浆的体积会有所减少,隧道衬砌结构的形变和扰动土的固结被视为引发盾构尾部土体沉降的首要诱因。然而,由于空隙未被充填完全而导致的泥浆渗入周围土层则很少作引发盾构尾部土体沉降的诱因而被进一步研究。对于超大型土压平衡式盾构机施工而言,这一点尤为重要。而且,在确定同步注浆质量方面具有很高的实践价值。 4 开挖面的研究 4.1 超孔隙水压力在隧道盾构中的浮动原则 超大型土压平衡式盾构机的施工方法主要是在开挖面后的土压力与土舱中的土压力之间寻求一个平衡。土舱中的土压力在计算时要考虑水文地质和隧道的埋深,表达式为h p k γ0 =,其中P 是平衡土压力和开挖面前端土体压力而且包括水压力;γ是土层的平均重度可以取为m kN 30.18;h 是土舱内压力传感器的 埋置深度,k 0是土的侧压力系数,范围是0.75~0.90,并且根据地面沉降的监测数据进行调整。 超大型土压平衡式盾构施工中的平衡状态是理想状态。当封闭结构前端的土体被刀盘挤压时,这种理想的平衡就会在刀盘的敞开面形式。随着刀盘的旋转和向前不断推进,土压力与超孔隙水压力也会有所增加,在此之后超孔隙水压力就会形成了。该压力在后期会逐渐消散而且导致土体固结和地面沉降。在超孔隙水压力增大时,土质结构会被更严重的破坏;当超孔隙水压力消散后,土层固结与
速度控制系统设计外文翻译
译文 流体传动及控制技术已经成为工业自动化的重要技术,是机电一体化技术的核心组成之一。而电液比例控制是该门技术中最具生命力的一个分支。比例元件对介质清洁度要求不高,价廉,所提供的静、动态响应能够满足大部分工业领域的使用要求,在某些方面已经毫不逊色于伺服阀。比例控制技术具有广阔的工业应用前景。但目前在实际工程应用中使用电液比例阀构建闭环控制系统的还不多,其设计理论不够完善,有待进一步的探索,因此,对这种比例闭环控制系统的研究有重要的理论价值和实践意义。本论文以铜电解自动生产线中的主要设备——铣耳机作为研究对象,在分析铣耳机组各构成部件的基础上,首先重点分析了铣耳机的关键零件——铣刀的几何参数、结构及切削性能,并进行了实验。用电液比例方向节流阀、减压阀、直流直线测速传感器等元件设计了电液比例闭环速度控制系统,对铣耳机纵向进给装置的速度进行控制。论文对多个液压阀的复合作用作了理论上的深入分析,着重建立了带压差补偿型的电液比例闭环速度控制系统的数学模型,利用计算机工程软件,研究分析了系统及各个组成环节的静、动态性能,设计了合理的校正器,使设计系统性能更好地满足实际生产需要 水池拖车是做船舶性能试验的基本设备,其作用是拖曳船模或其他模型在试验水池中作匀速运动,以测量速度稳定后的船舶性能相关参数,达到预报和验证船型设计优劣的目的。由于拖车稳速精度直接影响到模型运动速度和试验结果的精度,因而必须配有高精度和抗扰性能良好的车速控制系统,以保证拖车运动的稳速精度。本文完成了对试验水池拖车全数字直流调速控制系统的设计和实现。本文对试验水池拖车工作原理进行了详细的介绍和分析,结合该控制系统性能指标要求,确定采用四台直流电机作为四台车轮的驱动电机。设计了电流环、转速环双闭环的直流调速控制方案,并且采用转矩主从控制模式有效的解决了拖车上四台直流驱动电机理论上的速度同步和负载平衡等问题。由于拖车要经常在轨道上做反复运动,拖动系统必须要采用可逆调速系统,论文中重点研究了逻辑无环流可逆调速系统。大型直流电机调速系统一般采用晶闸管整流技术来实现,本文给出了晶闸管整流装置和直流电机的数学模型,根据此模型分别完成了电流坏和转速环的设计和分析验证。针对该系统中的非线性、时变性和外界扰动等因素,本文将模糊控制和PI控制相结合,设计了模糊自整定PI控制器,并给出了模糊控制的查询表。本文在系统基本构成及工程实现中,介绍了西门子公司生产的SIMOREGDC Master 6RA70全数字直流调速装置,并设计了该调速装置的启动操作步骤及参数设置。完成了该系统的远程监控功能设计,大大方便和简化了对试验水池拖车的控制。对全数字直流调速控制系统进行了EMC设计,提高了系统的抗干扰能力。本文最后通过数字仿真得到了该系统在常规PI控制器和模糊自整定PI控制器下的控制效果,并给出了系统在现场调试运行时的试验结果波形。经过一段时间的试运行工作证明该系统工作良好,达到了预期的设计目的。 提升装置在工业中应用极为普遍,其动力机构多采用电液比例阀或电液伺服阀控制液压马达或液压缸,以阀控马达或阀控缸来实现上升、下降以及速度控制。电液比例控制和电液伺服控制投资成本较高,维护要求高,且提升过程中存在速度误差及抖动现象,影响了正常生产。为满足生产要求,提高生产效率,需要研究一种新的控制方法来解决这些不足。随着科学技术的飞速发展,计算机技术在液压领域中的应用促进了电液数字控制技术的产生和发展,也使液压元件的数字化成为液压技术发展的必然趋势。本文以铅电解残阳极洗涤生产线中的提升装置为研究