工业机器人教案

教案(章、节备课)
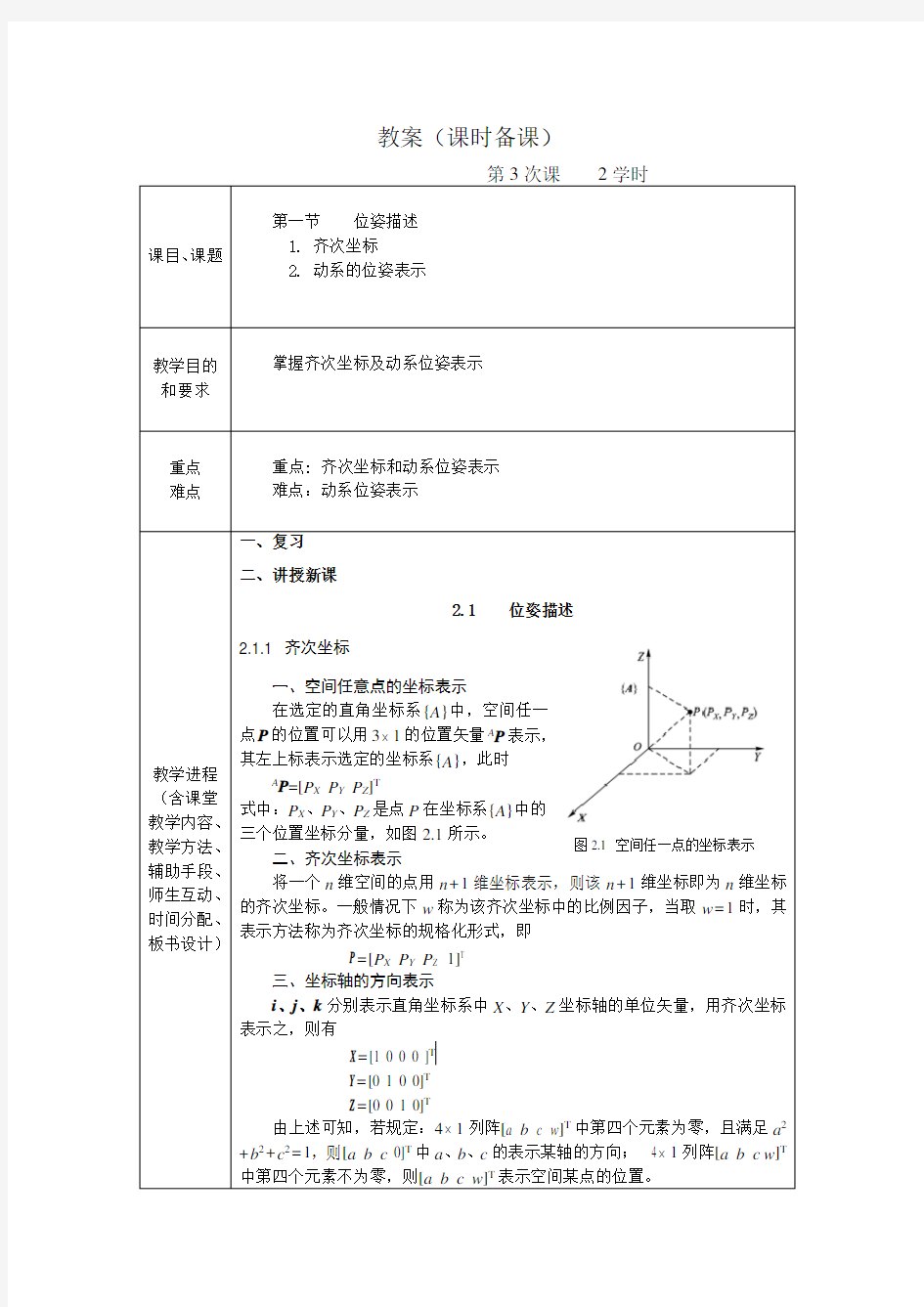
图2.1 空间任一点的坐标表示 教案(课时备课)
课目、课题
第一节 位姿描述
1. 齐次坐标
2. 动系的位姿表示 教学目的
和要求 掌握齐次坐标及动系位姿表示
重点 难点
重点: 齐次坐标和动系位姿表示
难点:动系位姿表示
教学进程(含课堂教学内容、教学方法、辅助手段、师生互动、时间分配、板书设计) 一、复习
二、讲授新课
2.1 位姿描述
2.1.1 齐次坐标
一、空间任意点的坐标表示
在选定的直角坐标系{A }中,空间任一
点P 的位置可以用3 ? 1的位置矢量A P 表示,
其左上标表示选定的坐标系{A },此时
A P =[P X P Y P Z ]T
式中:P X 、P Y 、P Z 是点P 在坐标系{A }中的
三个位置坐标分量,如图2.1所示。 二、齐次坐标表示
将一个n 维空间的点用n + 1维坐标表示,则该n + 1维坐标即为n 维坐标的齐次坐标。一般情况下w 称为该齐次坐标中的比例因子,当取w = 1时,其表示方法称为齐次坐标的规格化形式,即
P = [P X P Y P Z 1]T
三、坐标轴的方向表示
i 、j 、k 分别表示直角坐标系中X 、Y 、Z 坐标轴的单位矢量,用齐次坐标表示之,则有
X = [1 0 0 0 ]T
Y = [0 1 0 0]T
Z = [0 0 1 0]T
由上述可知,若规定:4 ? 1列阵[a b c w ]T 中第四个元素为零,且满足a 2 + b 2 + c 2 = 1,则[a b c 0]T 中a 、b 、c 的表示某轴的方向; 4 ? 1列阵[a b c w ]T 中第四个元素不为零,则[a b c w ]T 表示空间某点的位置。
四、矢量的方向表示
图2.2中所示的矢量u的方向用4?1列阵可表达为:
u =[a b c 0]T
a=cosα,b=cosβ,c=cosγ
图2.2中所示的矢量u的起点O为坐标
原点,用4?1列阵可表达为:
O=[0 0 0 1]T
例2.1用齐次坐标表示图2.3中所示的矢
量u、v、w的坐标方向。
图2.2坐标轴及矢量的方向表示
图2.3 用不同方向角表示方向矢量u、v、w
2.1.2 位姿描述
在机器人坐标系中,运动时相对于连杆不动的坐标系称为静坐标系,简称静系;跟随连杆运动的坐标系称为动坐标系,简称为动系。动系位置与姿态的描述称为动系的位姿表示,是对动系原点位置及各坐标轴方向的描述。
一、连杆的位姿描述
设有一个机器人的连杆,若给定了连杆PQ上某点的位置和该连杆在空间的姿态,则称该连杆在空间是完全确定的。
如图2.4所示,O'为连杆上任一点,O'X'Y'Z'为与连杆固接的一个动坐标系,即为动系。连杆PQ在固定坐标系OXYZ中的位置可用一齐次坐标表示为
图2.4 连杆的位姿表示
连杆的姿态可由动系的坐标轴方向来表示。令n、o、a分别为X'、Y'、Z'坐标轴的单位矢量,各单位方向矢量在静系上的分量为动系各坐标轴的方向余
若让楔块绕Z轴旋转–90°,用Rot(Z,–90°)
表示,再沿X轴方向平移4,用Trans(4,0,
0)表示,则楔块成为图2.8(b)所示的情况。此
时楔块用新的8个点来描述它的位置和姿态,
其矩阵表达式为
图2.7 抓握物体Q的手部