现代控制理论_倒立摆大作业介绍

直线一级倒立摆控制方法研究
--------现代控制理论课程大作业
倒立摆是一个开环不稳定的强非线性系统,其控制策略与杂技运动员顶杆平衡表演的技巧有异曲同工之处,目的在于使得摆杆处于临界稳定状态,是进行控制理论研究的典型实验平台。20世纪50年代,麻省理工学院的控制论专家根据火箭助推器原理设计出了第一套倒立摆实验设备,开启了最初的相关研究工作。倒立摆的种类丰富多样,按照其结构可将其分为:直线倒立摆、环形倒立摆以及平面倒立摆等,按照摆杆级数又可将其分为:一级、二级甚至三级等。
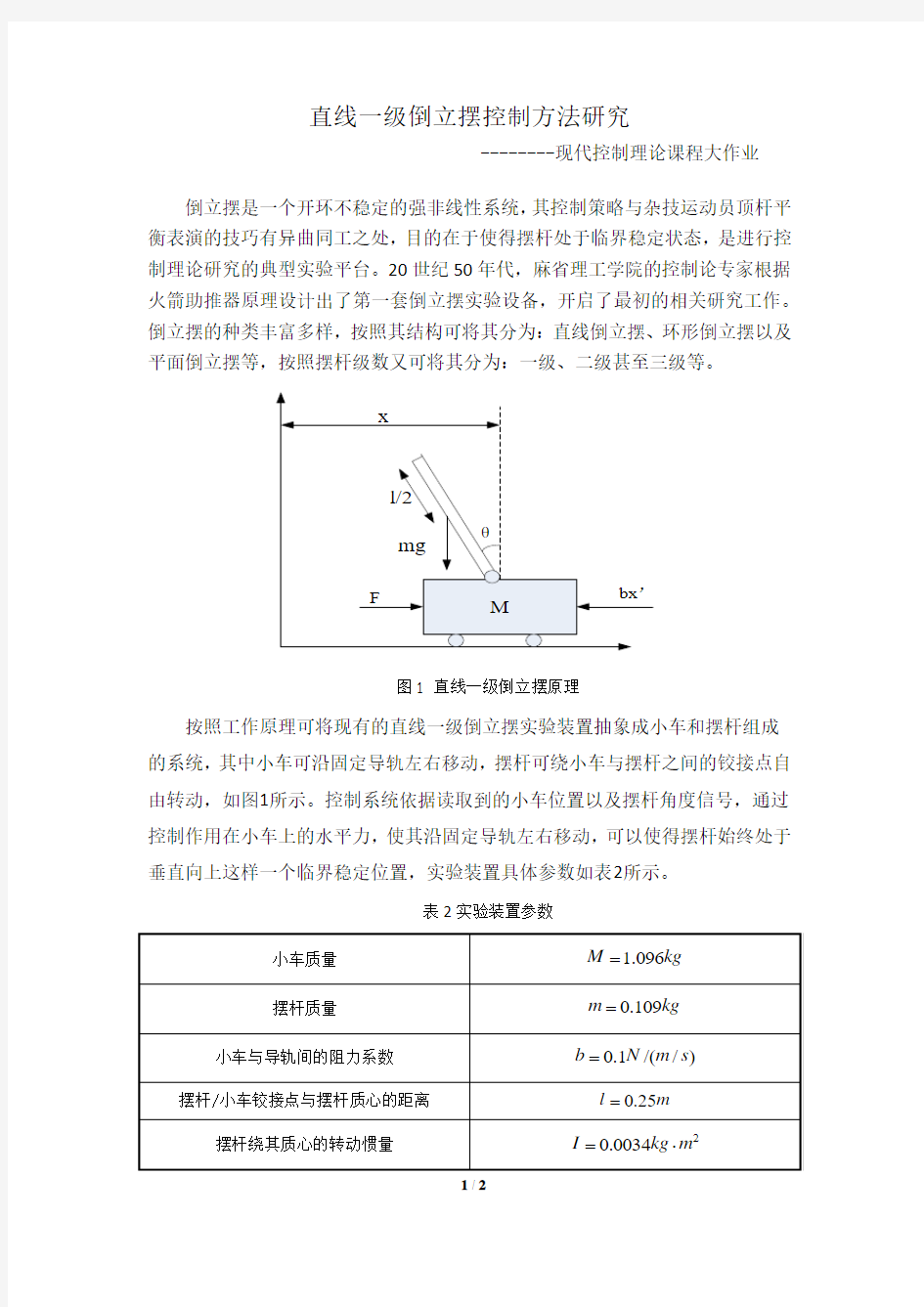
图1 直线一级倒立摆原理
按照工作原理可将现有的直线一级倒立摆实验装置抽象成小车和摆杆组成的系统,其中小车可沿固定导轨左右移动,摆杆可绕小车与摆杆之间的铰接点自由转动,如图1所示。控制系统依据读取到的小车位置以及摆杆角度信号,通过控制作用在小车上的水平力,使其沿固定导轨左右移动,可以使得摆杆始终处于垂直向上这样一个临界稳定位置,实验装置具体参数如表2所示。
表2实验装置参数
现要求基于现代控制理论,研究直线一级倒立摆的控制方法,可考虑按照如下具体步骤实现:1)建立直线一级倒立摆的运动方程;2)推导状态空间方程;3)分析能控及能观性;4)计算状态反馈矩阵及状态观测矩阵;5)通过离线仿真分析验证上述控制算法的有效性;6)通过上机实验观察其实际控制效果。
相关主题