北航信号与系统第一次实验报告材料超级详细版
信号与系统实验一
连续时间系统卷积的数值计算
原理
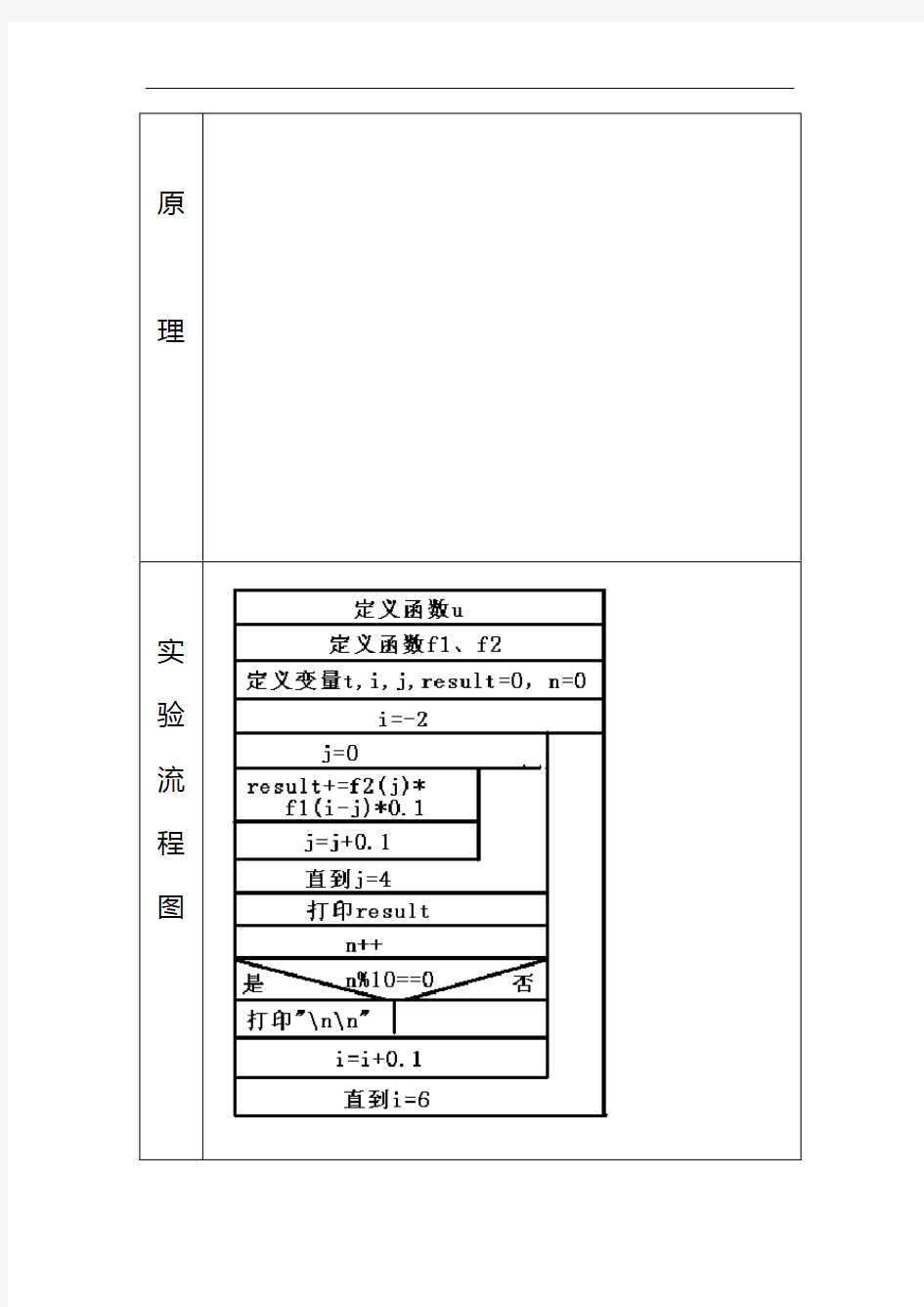
实验流程图
{result=0;
for(j=0;j<=4;j=j+0.1)
result+=f2(j)*f1(i-j)*0.1;
printf("%.1f\t%.2f\t",i,result);
}
printf ("\n");
}
实
验
数
-2.0 0.00 -1.9 0.01 -1.8 0.03 -1.7 0.06 -1.6
0.10
-1.5 0.15 -1.4 0.21 -1.3 0.28 -1.2 0.36 -1.1
3.5 2.95 3.6 2.80 3.7 2.64 3.8 2.47 3.9
2.29
4.0 2.10 4.1 1.90 4.2 1.71 4.3 1.53 4.4
1.36
4.5 1.20 4.6 1.05 4.7 0.91 4.8 0.78 4.9
0.66
5.0 0.55 5.1 0.45 5.2 0.36 5.3 0.28 5.4
0.21
5.5 0.15 5.6 0.10 5.7 0.06 5.8 0.03 5.9
0.01
6.0 0.00
绘
制
曲
线
实验二连续时间系统的频率响应
{return sqrt(x*x+(y-z)*(y-z));} float p(float x,float y,float z) {const float pi=3.1415927;
}
h=h/mo;w=w-ao;
printf("%.1f %5.3f %5.3f; ",f,h,w);
u++ ;
if(u%3==0)printf("\n");
}
printf("\n");}
实
验
the number of zero point:
the number of zero point: 2
Laf the zero point.(x,y) 1:2,1.5
2:2,-1.5
the number of pole point: 4
input the pole points.(x,y)
3.6 0.069 -0.299; 3.7 0.065 -0.371; 3.8 0.062 -0.441;
3.9 0.060 -0.507;
4.0 0. -0.571; 4.1 0. -0.632;
4.2 0.052 -0.691; 4.3 0.050 -0.747; 4.4 0. -0.801;
4.5 0. -0.853; 4.6 0.044 -0.902; 4.7 0.043 -0.950;
4.8 0.041 -0.996; 4.9 0.040 -1.040;
5.0 0.038 -1.;
A(1)
零
极
点
图
A(2)
幅频曲线
A(3) 相频曲线
分析此系统为带通滤波器,相应的3dB带宽的起始频率和终止频率分别为0.7332和2.7321。
零极点图B(2) 幅频曲线
相频曲线
分析由分析计算可知:此系统为低通滤波器,相应的3dB带宽终止频率为0.9854。
信号与系统实验5
信号与系统实验(五) 班级:通信5班姓名:刘贺洋学号:11081515 班级:通信5班姓名:章仕波学号:11081522 1.符号函数的傅里叶变换 (1)下面参考程序和运行结果是信号||2 f- t =的傅里叶变换,分析程序,判 e ) (t 断运行结果正确与否。 syms t; %时间符号 f=exp(-2*abs(t)); %符号函数 F=fourier(exp(-2*abs(t))); subplot(1,2,1); ezplot(f); subplot(1,2,2); ezplot(F); 1(1)图
(2)参考上述程序试画出信号)(32 )(3t u e t f t -=的波形及其幅频特性曲线。 1(2)源程序: syms t ; %时间符号 f=2/3*exp(-3*t)*heaviside(t); %符号函数 F=fourier(f); subplot(1,2,1); ezplot(f); subplot(1,2,2); ezplot(abs(F)); 1(2)图: 2.符号函数的傅里叶变换
(1)下面参考程序是求信号211)(ωω+=j F 的逆傅里叶变换,分析程 序,比较运行结果。 源程序2(1) syms t w; F=1/(1+w^2); f=ifourier(F,t); subplot(1,2,1); ezplot(F); subplot(1,2,2); ezplot(f); 2(1)图: (2)求信号ωωωsin 2)(=j F 的逆傅里叶变换,并用程序验证。
源程序2(2) syms t w; F=2*sin(w)/w; f=ifourier(F,t); subplot(1,2,1); ezplot(F); subplot(1,2,2); ezplot(f); 图2(2):
北航考研通信类综合921的一些经验之谈
转眼离考试结束已经一个多月了,感觉时间真快。。。。。在这里,说一些自己考试的经验吧,虽然还不知道自己考试的结果怎么样,但是希望我的经验呢能给后来的学弟学妹们提供一些帮助。 921通信类综合包含三门专业课:模电,信号与系统以及电磁场。其中模电占得分最多是60分,信号和电磁场都是45分,难度最大、最难得分的当然是模电,在我们学校,大家都叫它魔鬼,当初我们专业挂了四分之一的人!足以见其变态程度,幸好北航出的模电题一般都不会特别的难,但是你想不失分那是不可能的。 北航921专业课的考试大纲已经说了这几门课所使用的教材: 模电:1.张凤言编著,电子电路基础(第二版),高等教育出版社; 2.模拟集成电路的分析与设计,P.R.Gray等著,张晓林等译,高等教育出版社,2005年6月; 3. 童诗白主编,模拟电子技术基础(第四版),高等教育出版社 其中张凤言老师的那本是北航本校的教材,外面基本没的卖,我辗转终于买到一本,但是里面的内容实在是太多太繁杂,非一般人能接受的,特别是在考研时间如此紧迫的情况下,如果能弄到一本的话,看看其中波特图的章节就行了,其他的部分看童诗白老师的那本书完全就能应对考试。在这里,我要说一下自己复习时的一些心得吧。因为波特图是每年的必考题,但是童诗白老师那本书讲的跟张凤言老师讲的是完全不一样的,所以大家最好能看一下张凤言老师的那本书的那个章节,把那个章节的习题做了,考试题有可能就是在里面。另外,我复习的时候在图书馆借了一本模电的辅导书,我觉得非常好,现在忘了叫什么名字了,等我去图书馆查了再告诉大家,那本书感觉跟北航的要求很相近,其中波特图、反馈电路、放大电路的讲解都非常的好。 信号与系统:1. 郑君里,应启珩,杨为理,《信号与系统》,高等教育出版社,2000年5第二版。 2. 郑君里,应启珩,杨为理,《信号与系统》,高等教育出版社,第一版。 3.A.V. Oppenheim等著,刘树棠译,《信号与系统》第二版,西安交通大学出版社 信号与系统应该说是三门专业课中最简单的一门,也是最好拿分的一门,复习的到位的话,45分全拿到手都很正常。信号与系统考试题一般是三道大题,信号系统这么多内容,三道大题根本就考不了多少东西,通过我做往年的真题和自己考试的经验来看,最重要的还是那几个变换,傅里叶变换,拉普拉斯变换,Z变换,时域的,频域的,离散域的都要弄明白,而且要灵活运用,我的建议就是看好郑君里老师的两本书,那两本书写的实在是太经典了,大部分时间你要用来看教材,少部分时间看一些信号系统的考研辅导书,多见一些题型,也要练一些题来培养一下题感。 电磁场:1. 苏东林等,《电磁场与电磁波》,高等教育出版社(2008) 2. 苏东林等,《电磁场理论学习指导书》,电子工业出版社(2005.09)电磁场从2011年开始有了变化,教材之前还有一本徐永斌老师出的一本《工程电磁场基础》,以前是说这两本书都可以,从去年开始改了。徐永斌老师的书和苏东林老师的书我都买了,99%的内容是一样的,所以说这两本书都可以。其实我之前也是听别人的经验说是电磁场很简单,是最好复习的,但是复习的时候却发现是最难得,我足足看了一个月!!!现在想起来当时实在是太傻了,其实大家基本都没怎么学过电磁场,想在短时间内弄懂基本是不可能的,而且北航考的也很简单,总是一些老题型,但是我并不建议大家把《电磁场理论学习指导书》这本书来回翻几遍就不管了,因为每年出题的老师会不一样,说不定哪个老师心血来潮给你出点新题型,到时候就傻眼了,所以说课本还是要看的,但是要有选择的看,根据考纲上的
最优化方法课程设计实验报告_倒立摆
倒立摆控制系统控制器设计实验报告
成员:陈乾睿 2220150423 郑文 2220150493 学院:自动化 倒立摆控制系统控制器设计实验 一、实验目的和要求 1、目的 (1)通过本设计实验,加强对经典控制方法(LQR控制器、PID控制器)和智能控制方法(神经网络、模糊控制、遗传算法等)在实际控制系统中的应用研究。(2)提高学生有关控制系统控制器的程序设计、仿真和实际运行能力. (3)熟悉MATLAB语言以及在控制系统设计中的应用。 2、要求 (1)完成倒立摆控制系统的开环系统仿真、控制器的设计与仿真以及实际运行结果 (2)认真理解设计内容,独立完成实验报告,实验报告要求:设计题目,设计的具体内容及实验运行结果,实验结果分析、个人收获和不足,参考资料。程序
清单文件。 二、实验内容 倒立摆控制系统是一个典型的非线性系统,其执行机构具有很多非线性,包括:死区、电机和带轮的传动非线性等。 本设计实验的主要内容是设计一个稳定的控制系统,其核心是设计控制器,并在MATLAB/SIMULINK环境下进行仿真实验,并在倒立摆控制实验平台上实际验证。 算法要求:使用LQR以外的其它控制算法。 三、倒立摆系统介绍 倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的应用开发前景。 倒立摆的形式和结构各异,但所有的倒立摆都具有以下的特性:非线性,不确定性,耦合性,开环不稳定性,约束限制。 经过相关论文和文献的查询,我们决定采用模糊控制的方法进行倒立摆的控制。
2014信号与系统实验五(2)
Matlab拓展实验1:周期方波的傅立叶级数分析 一、周期方波信号的产生 1、周期方波函数:square(t,duty) (1)其中t为时间向量。 (2)duty为占空比,此参数可缺省,缺省时,duty=50。 注:周期方波的占空比为x%,是指一个周期内,高电平持续时间占整个周期时长的x%。但在square函数中,参数duty是一个0~100的数值。例如,若需产生占空比为20%的方波,则应设置duty=20。 2、功能描述:square函数产生一个周期为2π、高低电平分别为±1的周期方波,通过适当的编程可以调整为任意周期,任意幅度,任意中心值。 【例1】在时间范围[?4π,4π]产生周期的2π的周期方波。 clear;clf;clc; step=pi/200; %设置时间步长 t=-4*pi:step:4*pi; %设置时间范围 x1=square(t); %产生占空比为50%的周期方波 duty=20;x2=square(t,duty); %产生占空比为20%的周期方波 subplot(2,1,1);plot(t,x1); axis([-4*pi,4*pi,-1.5,1.5]);title('占空比为0.5的周期方波'); subplot(2,1,2);plot(t,x2); axis([-4*pi,4*pi,-1.5,1.5]);title('占空比为0.2的周期方波'); 上述程序的运行结果如下:
【思考】如将例1程序中的作图部分修改如下(修改部分以红色标出),这种处理方式称之为横坐标对pi归一化,图形结果会有何不同?这时横坐标的数值标注含义有何变化? subplot(2,1,1);plot(t/pi,x1); axis([-4,4,-1.5,1.5]);title('占空比为0.5的周期方波'); subplot(2,1,2);plot(t/pi,x2); axis([-4,4,-1.5,1.5]);title('占空比为0.2的周期方波'); 【实践1】产生周期为1,占空比为30%,高电平为1,低电平为0的周期方波,时间范围为[?2,2],即能观察到4个完整的周期。(时间变量的尺度变换) 二、傅立叶级数分解的计算 1、周期信号傅立叶级数展开的理论分析 周期信号的傅立叶级数有若干种形式(如三角形式、指数形式),这里以指数形式的傅立叶级数为例进行说明。 信号x(t)满足,x t=x(t+T),其中T称为周期(或基波周期,单位s),F=1T称为频率(或基波频率,单位Hz),ω=2πT=2πF称为基波角频率,单位rad s。 (1)指数形式的傅立叶级数:
北航微机原理实验1报告
实验一字符串排序 实验时间:2015.11.21 实验编号:同组同学:无一、实验背景 本实验可以实现对任意长度字符串的进行从小到大的排序并回显到屏幕上。 二、实验原理 本实验的采用的实验原理主要是冒泡法 原理图如下: 三、预习思考题的实验验证分析 预习思考题的实验分析验证(包括程序代码以及程序的执行结果)已经在预习报告中做出回答,在此不再进行赘述。 四、实验过程与结果 1、实验过程:(1)双击计算机桌面上的TPC-2003实验系统配套的软件;
(2)新建一个源程序,在当前运行环境下,选择菜单栏中的“文件”菜单,菜单下拉后选择“新建”,会弹出新建窗口,选择新建表单中的“ASM”,点击“确定”,新建汇编程序; (2)根据题目要求设计程序,并将其输入到软件界面上; (3)保存新建的源程序; (4)点击“汇编”的快捷键,编译调试窗口中显示出汇编结果,程序没有错误; (5)打开命令提示符操作界面,将生成的可执行文件拖入到其中,回车即可运行该程序; (6)对程序是否达到实验要求进行实验验证。 2、实验结果:本实验达到了以下要求 1、利用INT 21H的1号功能,从键盘输入任意长度的字符串,以回车符结束; 2、将输入的字符串存放在数据段中; 3、对输入的字符串按ASCII码从小到大排序(ASCII小者占低地址存放); 4、将排好序的字符串利用INT 21H的9号功能显示在微机屏幕上。 实验程序如下: STACK SEGMENT STACK DB 100 DUP(?) STACK ENDS DATA SEGMENT STR DB 100 DUP(?) DATA ENDS CODE SEGMENT ASSUME CS:CODE,DS:DATA,SS:STACK MAIN PROC MOV AX,DATA MOV DS,AX MOV SI,OFFSET STR
15秋北航《信号与系统》在线作业二100分答案
北航《信号与系统》在线作业二 一、单选题(共10 道试题,共30 分。) 1. 信号〔ε(t)-ε(t-2)〕的拉氏变换的收敛域为________。 A. Re[s]>0 B. Re[s]>2 C. 全S平面 D. 不存在 -----------------选择:C 2. 信号的时宽与信号的频宽之间呈________。 A. 正比关系 B. 反比关系 C. 平方关系 D. 没有关系 -----------------选择:B 3. If f1(t) ←→F1(jω),f2(t) ←→F2(jω) Then________。 A. [a f1(t) + b f2(t) ] ←→ [a F1(jω) *b F2(jω) ] B. [a f1(t) + b f2(t) ] ←→ [a F1(jω) - b F2(jω) ] C. [a f1(t) + b f2(t) ] ←→ [a F1(jω) + b F2(jω) ] D. [a f1(t) + b f2(t) ] ←→ [a F1(jω) /b F2(jω) ] -----------------选择:D 4. 某信号的频谱是周期的离散谱,则对应的时域信号为________。 A. 连续的周期信号 B. 连续的非周期信号 C. 离散的非周期信号 D. 离散的周期信号 -----------------选择:D 5. 信号在时域拥有的总能量,________其频谱在频域内能量的总和。 A. 大于 B. 等于 C. 小于 D. 不等于 -----------------选择:B 6. 理想低通滤波器是________。 A. 因果系统 B. 物理可实现系统 C. 非因果系统 D. 响应不超前于激励发生的系统 -----------------选择:C 7. 连续周期信号的傅氏变换是________。 A. 连续的 B. 周期性的 C. 离散的 D. 与单周期的相同 -----------------选择:C
倒立摆实验报告
倒立摆实验报告 机自82 组员:李宗泽 李航 刘凯 付荣
倒立摆与自动控制原理实验 一.实验目的: 1.运用经典控制理论控制直线一级倒立摆,包括实际系统模型的建立、根轨迹分析和控制器设计、频率响应分析、PID 控制分析等内容. 2.运用现代控制理论中的线性最优控制LQR 方法实验控制倒立摆 3.学习运用模糊控制理论控制倒立摆系统 4.学习MATLAB工具软件在控制工程中的应用 5.掌握对实际系统进行建模的方法,熟悉利用MATLAB 对系统模型进行仿真,利用学习的控制理论对系统进行控制器的设计,并对系统进行实际控制实验,对实验结果进行观察和分析,非常直观的感受控制器的控制作用。 二. 实验设备 计算机及等相关软件 固高倒立摆系统的软件 固高一级直线倒立摆系统,包括运动卡和倒立摆实物 倒立摆相关安装工具 三.倒立摆系统介绍 倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种
技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的利用开发前景。 倒立摆已经由原来的直线一级倒立摆扩展出很多种类,典型的有直线倒立摆环形倒立摆,平面倒立摆和复合倒立摆等,本次实验采用的是直线一级倒立摆。 倒立摆的形式和结构各异,但所有的倒立摆都具有以下的特性: 1) 非线性2) 不确定性3) 耦合性4) 开环不稳定性5) 约束限制 倒立摆控制器的设计是倒立摆系统的核心内容,因为倒立摆是一个绝对不稳定的系统,为使其保持稳定并且可以承受一定的干扰,需要给系统设计控制器,本小组采用的控制方法有:PID 控制、双PID 控制、LQR控制、模糊PID控制、纯模糊控制 四.直线一级倒立摆的物理模型: 系统建模可以分为两种:机理建模和实验建模。实验建模就是通过在研究对象上加上一系列的研究者事先确定的输入信号,激励
信号与系统-实验报告-实验五
实验五 连续信号与系统的S 域分析 学院 班级 姓名 学号 一、实验目的 1. 熟悉拉普拉斯变换的原理及性质 2. 熟悉常见信号的拉氏变换 3. 了解正/反拉氏变换的MATLAB 实现方法和利用MATLAB 绘制三维曲面图的方法 4. 了解信号的零极点分布对信号拉氏变换曲面图的影响及续信号的拉氏变换与傅氏变换的关系 二、 实验原理 拉普拉斯变换是分析连续时间信号的重要手段。对于当t ∞时信号的幅值不衰减的时间信号,即在f(t)不满足绝对可积的条件时,其傅里叶变换可能不存在,但此时可以用拉氏变换法来分析它们。连续时间信号f(t)的单边拉普拉斯变换F(s)的定义为: 拉氏反变换的定义为: 显然,上式中F(s)是复变量s 的复变函数,为了便于理解和分析F(s)随s 的变化规律,我们将F(s)写成模及相位的形式:()()()j s F s F s e ?=。其中,|F(s)|为复信号F(s)的模,而()s ?为F(s)的相位。由于复变量s=σ+jω,如果以σ为横坐标(实轴),jω为纵坐标(虚轴),这样,复变量s 就成为一个复平面,我们称之为s 平面。从三维几何空间的角度来看,|()|F s 和()s ?分别对应着复平面上的两个曲面,如果绘出它们的三维曲面图,就可以直观地分析连续信号的拉氏变换F(s)随复变量s 的变化情况,在MATLAB 语言中有专门对信号进行正反拉氏变换的函数,并且利用 MATLAB 的三维绘图功能很容易画出漂亮的三维曲面图。 ①在MATLAB 中实现拉氏变换的函数为: F=laplace( f ) 对f(t)进行拉氏变换,其结果为F(s) F=laplace (f,v) 对f(t)进行拉氏变换,其结果为F(v) F=laplace ( f,u,v) 对f(u)进行拉氏变换,其结果为F(v) ②拉氏反变换 f=ilaplace ( F ) 对F(s)进行拉氏反变换,其结果为f(t) f=ilaplace(F,u) 对F(w)进行拉氏反变换,其结果为f(u) f=ilaplace(F,v,u ) 对F(v)进行拉氏反变换,其结果为f(u) 注意: 在调用函数laplace( )及ilaplace( )之前,要用syms 命令对所有需要用到的变量(如t,u,v,w )等进行说明,即要将这些变量说明成符号变量。对laplace( )中的f 及ilaplace( )中的F 也要用符号定义符sym 将其说明为符号表达式。具体方法参见第一部分第四章第三节。 例①:求出连续时间信号 ()sin()()f t t t ε=的拉氏变换式,并画出图形 求函数拉氏变换程序如下: syms t s %定义符号变量 ft=sym('sin(t)*Heaviside(t)'); %定义时间函数f(t)的表达式
微机原理实验四实验报告
实验报告
实验四 8251可编程串行口与PC机通信实验一、实验要求 利用实验箱内的8251A芯片,实现与PC机的通信。 二、实验目的 1.掌握8251A芯片结构和编程方法; 2.了解实现串行通信的硬件环境,数据格式和数据交换协议; 3.了解PC机通信的基本要求。 三、实验原理 (一)8251A芯片工作方式配置: 1. 8个数据位; 2.无奇偶校验位; 3.1个停止位; 4.波特率因子设为16; 5. 波特率设为9600。 (二)8251A主要寄存器说明 图4-1 模式字 图4-2 命令字
CO MMAN D I NSTR UCT ION FO RMA T 图4-3 状态字 (三)8251编程 对8251 的编程就是对8251 的寄存器的操作,下面分别给出8251 的几个寄存器的格式。(1)方式控制字 方式控制字用来指定通信方式及其方式下的数据格式,具体各位的定义如图4-4所示。 图4-4 方式控制字说明 (2)命令控制字 命令控制字用于指定8251 进行某种操作(如发送、接收、内部复位和检测同步字符等)或处于某种工作状态,以便接收或发送数据。图4-5 所示的是8251 命令控制字各位的定义。 图4-5命令控制字说明 (3)状态字 CPU 通过状态字来了解8251 当前的工作状态,以决定下一步的操作,8251 的状态字如 图4-6所示。 图4-6 状态字说明 四、实验电路连接: 1.CS8251接228H,CS8279已固定接至238H; 2.扩展通信口18中的232RXD连8251RXD ,232TXD连8251TXD;
3.计算机的两个RS232通信口,一个连至仿真机通信口,一个连至扩展通信口18(所有通信口均为DB9)。注意:RS232通信口必须在设备断电状态下插拔! 图4-7 连线图 五、实验内容及要求 1. 将例程从PDF文档中导入到WMD86软件编辑环境中,调试通过。使用软件自带的示波器,观察Txd管脚的输出,验证结果的正确性。将结果截图保存,贴入实验报告。 2.剔除例程中冗余部分,实现对例程的精简和优化。将精简内容与相应理由写入实验报告。 3.将自己学号的后三位数字通过RS232端口的Txd管脚输出。使用软件自带的示波器,观察Txd管脚的输出,验证结果的正确性。将结果截图保存,贴入实验报告。 4.通过读状态寄存器的方法,获得发送移位寄存器是否为空的信息,实现学号后三位数字的循环发送。将结果截图保存,贴入实验报告。 5.给每帧数据间添加固定的时间间隔,时间间隔为10000个指令周期。将结果截图保存,
北航《信号与系统》复习题一
北航《信号与系统》复习题一 一、 单选题 1. 连续周期信号的频谱具有( )。 A. 连续性、周期性 B. 连续性、收敛性 C. 离散性、周期性 D. 离散性、收敛性 2. 下列描述正确的是( )。 A. 信号()t f 反折,则其相应的频谱()ωj F 也反折。 B. 信号()t f 在时间轴上扩展2倍,则其相应的频谱在ω轴上也扩展2倍。 C. 信号()t f 在时间轴上平移2,则其相应的频谱在ω轴上也平移2。 D. 信号()t f 为时限信号,则其相应的频谱也是频带有限的。 3. 连续时间LTI 系统的单位冲激响应)2()(4-=-t u e t h t ,该系统是( )。 A. 因果稳定 B. 因果不稳定 C. 非因果稳定 D. 非因果不稳定 4. 一信号x(t)的最高频率为500Hz ,则利用冲激串采样得到的采样信号x(nT)能唯一表示出原信号的最大采样周期为( )。 A. 500 B. 1000 C. 0.05 D. 0.001 5. f (5-2t )是如下运算的结果( ) A. f (-2t )右移5
B. f (-2t )左移5 C. f (-2t )右移 25 D. f (-2t )左移2 5 6. 已知)()(),()(21t u e t f t u t f at -==,可以求得=)(*)(21t f t f ( )。 A. 1-at e - B. at e - C. )1(1 at e a -- D. at e a -1 7. 线性系统响应满足以下规律( )。 A. 若起始状态为零,则零输入响应不一定为零。 B. 若起始状态为零,则零状态响应为零。 C. 若系统的零状态响应为零,则强迫响应也为零。 D. 若激励信号为零,零输入响应就是自由响应。 8.若对f (t )进行理想取样,其奈奎斯特取样频率为f s ,则对)23 1 (-t f 进行取样,其奈奎斯特取样频率为( )。 A. 3f s B. s f 3 1 C. 3(f s -2) D. )2(3 1 -s f 9.时域是实偶函数,其傅氏变换一定是( )。 A. 实偶函数 B. 纯虚函数 C. 任意复函数 D. 任意实函数 10.理想低通滤波器是( )。 A. 因果系统 B. 物理可实现系统
倒立摆实验报告
目录 一、倒立摆系统介绍 (2) 1.1倒立摆系统简介 (2) 1.2 倒立摆组成及其原理 (2) 1.3 倒立摆特性 (3) 二、一级倒立摆 (3) 2.1一级倒立摆建模 (3) 2.2 一级倒立摆控制方法 (11) 2.2.1 单输入—单输出控制方法 (11) 超前滞后控制方法 2.2.2 单输入—多输出控制方法 (22) 双PID控制方法 2.2.3 多输入—多输出控制方法 (30) 极点配置法 二次线性最优控制法 三、二级倒立摆 (36) 3.1二级倒立摆建模 (36) 3.2 二级倒立摆控制方法 (46) 3.2.1 二次线性最优控制法 (46) 3.2.2 基于融合技术的模糊控制法 (48) 四、总结 (60) 五、参考文献 (63)
一、倒立摆系统介绍 1.1倒立摆系统简介 倒立摆是机器人技术、控制理论、计算机控制等多个领域、多种技术的有机结合,其被控系统本身又是一个绝对不稳定、高阶次、多变量、强耦合的非线性系统,可以作为一个典型的控制对象对其进行研究。最初研究开始于二十世纪50 年代,麻省理工学院(MIT)的控制论专家根据火箭发射助推器原理设计出一级倒立摆实验设备。近年来,新的控制方法不断出现,人们试图通过倒立摆这样一个典型的控制对象,检验新的控制方法是否有较强的处理多变量、非线性和绝对不稳定系统的能力,从而从中找出最优秀的控制方法。倒立摆系统作为控制理论研究中的一种比较理想的实验手段,为自动控制理论的教学、实验和科研构建一个良好的实验平台,以用来检验某种控制理论或方法的典型方案,促进了控制系统新理论、新思想的发展。由于控制理论的广泛应用,由此系统研究产生的方法和技术将在半导体及精密仪器加工、机器人控制技术、人工智能、导弹拦截控制系统、航空对接控制技术、火箭发射中的垂直度控制、卫星飞行中的姿态控制和一般工业应用等方面具有广阔的利用开发前景。平面倒立摆可以比较真实模拟火箭的飞行控制和步行机器人的稳定控制等方面的研究。 1.2倒立摆组成及其原理 倒立摆的组成包括计算机、运动控制卡、伺服系统、倒立摆本体和光电码盘、反馈测量元件等几大部分,组成一个闭环系统。对于直线型倒立摆,可以根据伺服电机自带的码盘反馈通过换算获得小车的位移,小车的速度信号可以通过差分法得到;各个摆杆的角度由光电码盘测得并直接反馈到控制卡,速度信号可以通过差分方法得到。计算机从运动控制卡中实时读取数据,确定控制策略(电机的输出力矩),并发送给运动控制卡。运动控制卡经过DSP 内部的控制算法实现该控制决策,产生相应的控制量,使电机转动,带动小车运动,保持摆杆平衡。
信号与系统实验实验报告
信号与系统实验实验报 告 文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]
实验五连续系统分析一、实验目的 深刻理解连续时间系统的系统函数在分析连续系统的时域特性、频域特性及稳定性中的重要作用及意义,掌握根据系统函数的零极点设计简单的滤波器的方法。掌握利用MATLAB分析连续系统的时域响应、频响特性和零极点的基本方法。 二、实验原理 MATLAB提供了许多可用于分析线性时不变连续系统的函数,主要包含有系统函数、系统时域响应、系统频域响应等分析函数。 三、实验内容 1.已知描述连续系统的微分方程为,输入,初始状态 ,计算该系统的响应,并与理论结果比较,列出系统响应分析的步骤。 实验代码: a=[1 10]; b=[2]; [A B C D]=tf2ss(b,a); sys=ss(A,B,C,D); t=0: :5; xt=t>0; sta=[1]; y=lsim(sys,xt,t,sta); subplot(3,1,1); plot(t,y); xlabel('t'); title('系统完全响应 y(t)'); subplot(3,1,2); plot(t,y,'-b'); hold on yt=4/5*exp(-10*t)+1/5; plot(t,yt,' : r'); legend('数值计算','理论计算'); hold off xlabel('t'); subplot(3, 1 ,3); k=y'-yt; plot(t,k); k(1) title('误差');
实验结果: 结果分析: 理论值 y(t)=0. 8*exp(-10t)*u(t)+ 程序运行出的结果与理论预期结果相差较大误差随时间增大而变小,初始值相差最大,而后两曲线基本吻合,表明该算法的系统响应在终值附近有很高的契合度,而在初值附近有较大的误差。 2.已知连续时间系统的系统函数为,求输入分别为,, 时,系统地输出,并与理论结果比较。 a=[1,3,2,0]; b=[4,1]; sys=tf(b,a); t=0: :5; x1=t>0; x2=(sin(t)).*(t>0); x3=(exp(-t)).*(t>0); y1=lsim(sys,x1,t); y2=lsim(sys,x2,t); y3=lsim(sys,x3,t); subplot(3,1,1); plot(t,y1); xlabel('t'); title('X(t)=u(t)'); subplot(3,1,2); plot(t,y2); xlabel('t'); title('X(t)=sint*u(t)'); subplot(3, 1 ,3); plot(t,y3); xlabel('t'); title('X(t)=exp(-t)u(t)'); 实验结果: 结果分析: a=[1,3,2,0]; b=[4,1]; sys=tf(b,a); t=0: :5; x1=t>0; x2=(sin(t)).*(t>0); x3=(exp(-t)).*(t>0); y1=lsim(sys,x1,t); y2=lsim(sys,x2,t); y3=lsim(sys,x3,t); subplot(3,1,1); plot(t,y1,'-b');
17春北航《信号与系统》在线作业一
2017秋17春北航《信号与系统》在线作业一 一、单选题(共10 道试题,共30 分。) 1. 信号〔ε(t)-ε(t-2)〕的拉氏变换的收敛域为________。 A. Re[s]>0 B. Re[s]>2 C. 全S平面 D. 不存在 正确答案: 2. 将信号f(t)变换为________称为对信号f(t)的平移或移位。 A. f(t–t0) B. f(k–k0) C. f(at) D. f(-t) 正确答案: 3. 计算ε(3-t)ε(t)= ________。 A. ε(t)-ε(t-3) B. ε(t) C. ε(t)- ε(3-t) D. ε(3-t) 正确答案: 4. 对因果系统,只要判断H(s)的极点,即A(s)=0的根(称为系统特征根)是否都在左半平面上,即可判定系统是否稳定。下列式中对应的系统可能稳定的是?________ A. s*s*s+2008s*s-2000s+2007 B. s*s*s+2008s*s+2007s C. s*s*s-2008s*s-2007s-2000 D. s*s*s+2008s*s+2007s+2000 正确答案: 5. 幅度调制的本质是________。 A. 改变信号的频率 B. 改变信号的相位 C. 改变信号频谱的位置 D. 改变信号频谱的结构 正确答案: 6. 哪种滤波器功能是只允许信号中的低频成分通过________。 A. 理想低通滤波器 B. 带通滤波器
C. 高通滤波器 D. 以上全对 正确答案: 7. 零输入响应是________。 A. 全部自由响应 B. 部分自由响应 C. 部分零状态响应 D. 全响应与强迫响应之差 正确答案: 8. 信号的时宽与信号的频宽之间呈________。 A. 正比关系 B. 反比关系 C. 平方关系 D. 没有关系 正确答案: 9. 时域是实偶函数,其傅氏变换一定是________。 A. 实偶函数 B. 纯虚函数 C. 任意复函数 D. 任意实函数 正确答案: 10. 已知一连续系统在输入f(t)的作用下的零状态响应为y=f(4t),则该系统为________。 A. 线性时不变系统 B. 线性时变系统 C. 非线性时不变系统 D. 非线性时变系统 正确答案: 北航《信号与系统》在线作业一 二、多选题(共10 道试题,共40 分。) 1. 关于带宽描述正确的是________。 A. 在通信工程中,带宽是指波形的振幅频谱中正频率的带宽 B. 从理论上讲有限时域信号的带宽是无穷的,真正做到有限带宽是很不容易的 C. 绝对带宽一般是正频率轴上的带宽 D. 以上描述都对 正确答案:
微机原理实验报告
微 机 原 理 实 验 报 告 班级: 指导老师:学号: 姓名:
实验一两个多位十进制数相加的实验 一、实验目的 学习数据传送和算术运算指令的用法 熟悉在PC机上建立、汇编、链接、调试和运行汇编语言程序的过程。 二、实验内容 将两个多位十进制数相加,要求被加数和加数均以ASCII码形式各自顺序存放在以DATA1、DATA2为首的5个内存单元中(低位在前),结果送回DATA1处。 三、程序框图 图3-1
四、参考程序清单 DATA SEGMENT DATA1 DB 33H,39H,31H,37H,34H;被加数 DATA1END EQU $-1 DATA2 DB 34H,35H,30H,38H,32H;加数 DATA2END EQU $-1 SUM DB 5 DUP(?) DATA ENDS STACK SEGMENT STA DB 20 DUP(?) TOP EQU LENGTH STA STACK ENDS CODE SEGMENT ASSUME CS:CODE,DS:DATA,SS:STACK,ES:DATA START: MOV AX,DATA MOV DS,AX MOV AX,STACK MOV SS,AX MOV AX,TOP MOV SP,AX
MOV SI,OFFSET DATA1END MOV DI,OFFSET DATA2END CALL ADDA MOV AX,4C00H INT 21H ADDA PROC NEAR MOV DX,SI MOV BP,DI MOV BX,05H AD1: SUB BYTE PTR [SI],30H SUB BYTE PTR [DI],30H DEC SI DEC DI DEC BX JNZ AD1 MOV SI,DX MOV DI,BP MOV CX,05H CLC AD2: MOV AL,[SI] MOV BL,[DI] ADC AL,BL
2021年倒立摆实验报告(根轨迹)
*欧阳光明*创编 2021.03.07
I 摆杆惯量0.0034 kg*m*m g 重力加速度9.8 kg.m/s (2)直线一级倒立摆根轨迹校正控制原理 基于根轨迹法校正的基本思想是:假设系统的动态性能指标可由靠近虚轴的一对共轭闭环主导极点来表征,因此,可把对系统提出的时域性能指标的要求转化为一对期望闭环主导极点。确定这对闭环主导极点的位置后,首先根据绘制根轨迹的相角条件判断一下它们是否位于校正前系统的根轨迹上。如果这对闭环主导极点正好落在校正前系统的根轨迹上,则无需校正,只需调整系统的根轨迹增益即可;否则,可在系统中串联一个超前校正装置。 常见的校正器有超前校正、滞后校正以及超前滞后校正等。 2. 实验方法 (1)直线倒立摆建模、仿真与分析 利用牛顿-欧拉方法建立直线一级倒立摆系统的数学模型;依照根轨迹设计的步骤得到系统的控制器,利用MA TLAB Simulink中的工具进行仿真分析。 (3)直线一级倒立摆根轨迹校正控制 利用MATLAB Simulink来实现根轨迹校正控制参数设定和仿真,并利用该参数来设定只限一级倒立摆的根轨迹校正控制器值,分析和仿真倒立摆的运行情况。 3. 实验装置 直线单级倒立摆控制系统硬件结构框图如图1所示,包括计算机、I/O设备、伺服系统、倒立摆本体和光电码盘反馈测量元件等几大部分,组成了一个闭环系统。 图1 一级倒立摆实验硬件结构图 对于倒立摆本体而言,可以根据光电码盘的反馈通过换算获得小车的位移,小车的速度信号可以通过差分法得到。摆杆的角度由光电码盘检测并直接反馈到I/O设备,速度信号可以通过差分法得到。计算机从I/O设备中实时读取数据,确定控制策略(实际上是电
北理工信号与系统实验(5)
实验5 连续时间系统的复频域分析 一、实验目的 1.掌握拉普拉斯变换及其反变换的定义,并掌握MATLAB实现方法。 2.学习和掌握连续时间系统函数的定义及复频域分析方法。 3.掌握系统零极点的定义,加深理解系统零极点分布与系统特性的关系。 二、实验原理与方法 1.拉普拉斯变换 连续时间信号x(t)的拉普拉斯变换、反变换定义为 MATLAB中,可以采用符号数学工具箱的laplace函数和ilaplace函数进行拉氏变换和拉氏反变换。 L=laplace(F)符号表达式F的拉氏变换,F中时间变量为t,返回变量为s的结果表达式。 L=laplace(F,t)用t替换结果中的变量t。 F=ilaplace(L)以s为变量的符号表达式L的拉氏反变换,返回时间变量为t的结果表达式。 F=ilaplace(L,x)用x替换结果中的变量t。 2.连续时间系统的系统函数 连续时间系统的系统函数是系统单位冲击响应的拉氏变换 连续时间系统的系统函数还可以由输入和输出信号的拉氏变换之比得到 单位冲击响应h(t)反映了系统的固有性质,而H(s)从复频域反映了系统的固有性质。由上式描述的连续时间系统,其系统系数为s的有理函数
3.连续时间系统的零极点分析 系统的零点指使上式的分子多项式为零的点,极点指使分母多项式为零的点,零点使系统的值为零,极点使系统的值为无穷大。通常将系统函数的零极点绘在s平面上,零点用○表示,极点用×表示,得到零极点分布图。 由零点定义可知,零点和极点分别指上式分子和分母多项式的根,利用MATLAB求多项式的根可以通过roots来实现,该函数调用格式为: r=roots(c) c为多项式的系数向量,返回值r为多项式的根向量。 分别对上式的分子、分母多项式求根即可求得零极点。 此外,在MATLAB中还提供了pzmap函数来求取零极点和绘制系统函数的零极点分布图,该函数的调用格式为: Pzmap(sys) 绘出系统模型sys描述的系统的零极点分布图。 [p,z]=pzmap(sys) 这种调用方法返回极点和零点,而不绘出零极点分布图。其中sys为系统传函模型,由t命令sys=tf(b,a)实现,b、a为传递函数的分子和分母多项式的系数向量。 MATLAB还提供了两个专用函数tf2zp和zp2tf来实现系统传递函数模型和灵机电网增益模型的转换,其调用格式为 [z,p,k]=th2zp(b,a) [b,a]=th2zp(z,p,k) 其中b、a为传递函数的分子和分母多项式的系数向量,返回值z为零点列向量,p为极点列向量,k为系统函数零极点形式的增益。 三、实验内容 1.已知系统的冲激响应h(t)u(t)u(t2) =,试采用复频域的 =--,输入信号x(t)u(t) 方法求解系统的响应,编写MATLAB程序实现。 解:MATLAB程序如下: h=sym('heaviside(t)-heaviside(t-2)'); H=laplace(f) x=sym('heaviside(t)'); X=laplace(x) Y=H*X
北京理工大学微机原理实验报告
微机原理与接口技术 实验报告 实验内容:汇编语言程序设计实验 组别:12 姓名: 班级: 学号:
一、实验目的 1、熟悉IDE86集成开发环境的使用。 2、通过编程、上机调试,进一步理解汇编语言的设计思路与执行过程。 3、熟悉DOS命令调用,以达到输入输出、返回DOS系统等目的。 4、掌握利用汇编实现求和与求最值的方法。 5、掌握利用汇编实现数制转换的方法。 6、巩固理论知识,锻炼动手编程,独立思考的能力。 二、实验内容(具体内容) 1、求从TABLE开始的10个无符号字节数的和,并将结果放在SUM字单元中。并查看前5个,前8 个数之和以及各寄存器和内存的状态。 2、在1的基础上修改程序,求出10个数中的最大值和最小值,最后将最大最小值分别赋给MAX及 MIN。 3、求1到 100 的累加和,并用十进制形式将结果显示在屏幕上。要求实现数据显示,并返回DOS 状态。 三、实验方法 1、设计思路 (1)实验1的设计思路:先将10个要相加的数存在以TABLE为首的10个连续的存储单元中,然后利用循环结构依次取出数值放在AL中并累加,若有进位则加到AH中直至循环10次累加结束,将累加的结果放在SUM中并返回DOS状态。 (2)实验2的设计思路:先将10个要比较的数放在以TABLE为首的10个连续的存储单元中。 将第一个数首先赋给AL和AH(分别存储相对最小和最大值)在利用LOOP循环结构,依次和下面的数进行比较,每次把相对的最大值与最小值存储到AH和AL中直至循环9次比较结束,将AH和AL里面的最大值与最小值赋给MAX和MIN,返回DOS状态 (3)实验3的设计思路:先在内存中定义COUNT=100,表示1-100求和,若相求1-n的和并显示只需COUNT的值为n即可,同时定义一块以DNUM为首地址的数据区用于存储累加和的十进制数对应的ASCII码。先利用AX和LOOP求出1-COUNT的累加和存在AX中;在进行数值转化,AX 依次除10取余数保存,将16进制数转化为10进制ASCII码值并存在DUNM中。最后在屏幕上显示并返回DOS状态。 2程序流程图 实验一、二和三的流程图分别如图1、图2和图3所示
北航《信号与系统》在线作业二15秋标准答案
北航《信号与系统》在线作业二 单选题多选题判断题 一、单选题(共 10 道试题,共 30 分。) 1. 信号〔ε(t)-ε(t-2)〕的拉氏变换的收敛域为 ________。 A. Re[s]>0 B. Re[s]>2 C. 全S平面 D. 不存在 -----------------选择:C 2. 信号的时宽与信号的频宽之间呈 ________。 A. 正比关系 B. 反比关系 C. 平方关系 D. 没有关系 -----------------选择:B 3. If f1(t) ←→F1(jω), f2(t) ←→F2(jω) Then________。 A. [a f1(t) + b f2(t) ] ←→ [a F1(jω) *b F2(jω) ] B. [a f1(t) + b f2(t) ] ←→ [a F1(jω) - b F2(jω) ] C. [a f1(t) + b f2(t) ] ←→ [a F1(jω) + b F2(jω) ] D. [a f1(t) + b f2(t) ] ←→ [a F1(jω) /b F2(jω) ] -----------------选择:D 4. 某信号的频谱是周期的离散谱,则对应的时域信号为 ________。 A. 连续的周期信号 B. 连续的非周期信号 C. 离散的非周期信号 D. 离散的周期信号 -----------------选择:D 5. 信号在时域拥有的总能量,________其频谱在频域内能量的总和。 A. 大于 B. 等于 C. 小于 D. 不等于 -----------------选择:B 6. 理想低通滤波器是 ________。 A. 因果系统 B. 物理可实现系统 C. 非因果系统 D. 响应不超前于激励发生的系统 -----------------选择:C 7. 连续周期信号的傅氏变换是 ________。 A. 连续的