-矢量控制坐标变换
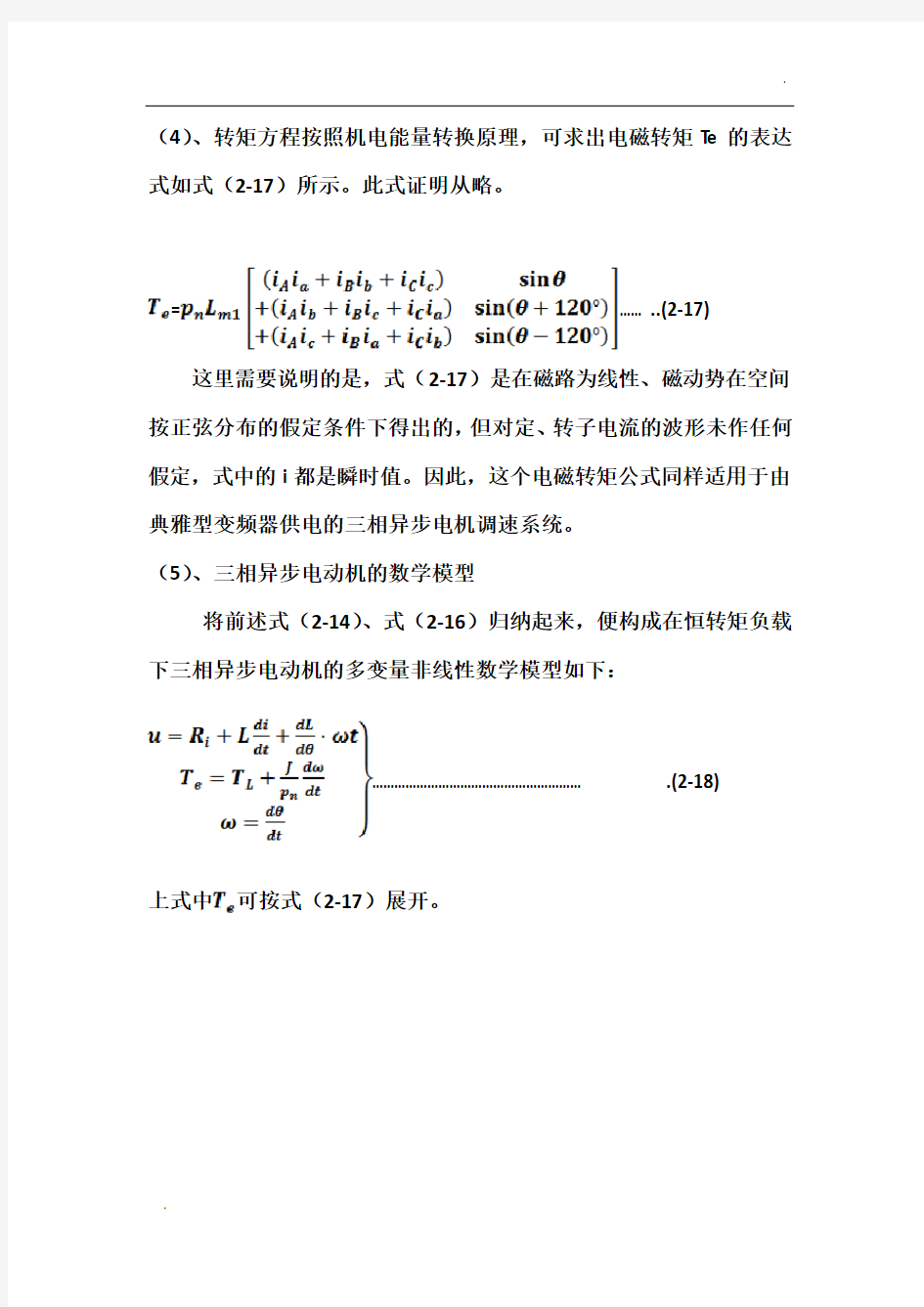

(4)、转矩方程按照机电能量转换原理,可求出电磁转矩Te的表达式如式(2-17)所示。此式证明从略。
=……..(2-17)
这里需要说明的是,式(2-17)是在磁路为线性、磁动势在空间按正弦分布的假定条件下得出的,但对定、转子电流的波形未作任何假定,式中的i都是瞬时值。因此,这个电磁转矩公式同样适用于由典雅型变频器供电的三相异步电机调速系统。
(5)、三相异步电动机的数学模型
将前述式(2-14)、式(2-16)归纳起来,便构成在恒转矩负载下三相异步电动机的多变量非线性数学模型如下:
………………………………………………….(2-18)
上式中可按式(2-17)展开。
2.3. 坐标变换和变换矩阵
虽然,在上节中已经推导出异步电动机的动态数学模型,但是,要分析和求解这组非线性方程是十分困难的,即使要画出很清晰的结构图也非易事。通常须采用坐标变换的方法。使变换后的数学模型变得简单一些。
2.3.1 坐标变换的原则和基本思路
从上节分析异步电动机数学模型的过程中可以看出,这个数学模型之所以复杂,关键是因为有一个复杂的电感矩阵,以及三相异步电机电磁关系的强耦合和非线性,故要简化数学模型,一是从简化磁链的关系着手;二是设法使三相异步电动机复杂的电磁关系解耦。怎么做?比较容易想到的方法就是前面所讲到过的设法为异步电动机创造类似于直流电动机所具有的三个条件,即将交流电机的物理模型(见图2-3)等效地变换成类似直流电机的模式(见下页图1-2),如能这样,三相异步电动机的分析和控制问题就可以大为化简,并且,完全可以沿用直流电机调速系统的控制思路对三相异步电动机进行控制,进而得到与支流调速系统相媲美的调速性能。坐标变换正是为了这个目的而提出的一种方法。
在这里,不同电机模型在变换前后彼此等效的原则是,在不同坐标中它们所产生的磁动势完全一致。
三相绕组与两相绕组的转换(M-T坐标举例)
如图1-2所示的模型有两个互相垂直的绕组,它们是M绕组和T 绕组,且以角频率在空间旋转。T、M绕组分别通以直流电流、。在绕组轴线方向产生磁场M,励磁电流。调节大小可以调节磁场强弱。在T绕组轴线方向产生磁势,这个磁势总是与磁场同步旋转,而且总是与磁场方向垂直,调节的大小,可以在磁场不变的情况下改变转矩的大小,称为转矩电流。、分别属于T绕组、M绕组,因此分别可调、可控。
如果异步电动机按照M、T两组绕组模型运行,就可以满足如直流电动机那样的调速性能好的三个条件。
实际上三相异步电动机定子三相绕组嵌在定子铁芯槽中,在空间上相互差120°电角度,固定不动。根据电机学原理或统一电机理论知道,三相绕组的作用,完全可以用在空间上相互垂直的两个静止的
绕组的电流由固定的变换关系。
由上例可见,产生旋转磁动势并不一定非要三相不可,(在前面已经提到),除单相、两相、三相、四相等任意对称的多相绕组,通以平衡的多相电流,都能产生旋转磁动势,当然以两相最为简单。图2-4b 中画出了两相静止绕组,它们在空间互差90°,通以时间上互差90°的两相平衡交流电流,也产生旋转磁动势F。当图2-4a和b 的两个旋转磁动势大小和转速都相等时,即认为图2-4b两绕组与图2-4a的三相绕组等效。
再看图2-4c中的两个匝数相等且互相垂直的绕组M和T(或d-q),它们分别通以直流电流和,产生合成磁动势F,因为绕组中通过的是直流,故F的位置相对于绕组来说是固定的。如果让包含
两个绕组在内的整个铁芯以同步转速旋转,则磁动势F自然也随之旋转起来,成为旋转磁动势。把这个旋转磁动势的大小和转速也控制成与图2-4a和2-4b中的磁动势一样,那么这套旋转的直流绕组也就和前面两套固定的交流绕组都等效了。当观察者站在地面上看,它们是与三相交流绕组等效地旋转直流绕组;但当观察者也站到铁芯上和绕组一起旋转时,在他看来,M和T(或d-q)就是两个通以直流而互相垂直的静止绕组,它们就的的确确是一个直流电机的物理模型了;如果再设法把磁通Φ的位置控制在M轴(或d 轴)上,这样,就和直流电机的运转机理没有本质上的区别了。这时,绕组M(或d)相当于直流电机的励磁绕组,绕组T(或q)相当于直流电机的电枢绕组。由此可见。从物理概念(定性)上来讲,通过坐标系的变换,我们完全能够找到一个与三相交流绕组等效地直流电机模型,现在的问题,如何求出、、与和()、()之间准确的数值等效关系,而这恰恰就是需要用坐标变换来解决的问题。
遵照把三相交流绕组等效变换成直流电机模型的目标,坐标变换的总体思路是:以产生同样的旋转磁动势为前提,先把三相静止绕组A、B、C 等效变换导两相绕组的静止的α-β坐标系,然后再从两相静止的α-β坐标系等效变换导旋转的具有直流绕组的d-q坐标系。需要指出,旋转的具有直流绕组的d-q坐标系可以是以任意转速ω旋转的,也可以是以同步转速旋转地,即为M-T坐标系,还有,在坐标变换中还会经常用到两相坐标系与极坐标之间的变换。
2.3. 2相—三相变换(3/2变换)——Clarke变换
=
=
=
写成矩阵形式,得:
=
根据图2-4可知,首先应该找出三相绕组的电流与两相静止的
α、β绕组的电流的变换关系,接着就是还要找到两相静止的α、β绕组的电流与两相旋转的M、T绕组(或d-q绕组)的电流变换关系。
如果M、T,α、β绕组的电流,都用矢量表示,那么,为了找到那些“关系”,我们就有必要建立α、β坐标系、M、T 坐标系,以及在矢量控制中最常用的另一个坐标系——d-q坐标系。这三个坐标系在图2-4中都作了清晰的表述。
2.3.2相—— 三两相变换(3/2变换)——Clarke 变换
2N a i =0B 3360os i -i C N N A
=)i 2
1i 21i (3C B A N --
in i i 32S N N B B =03060in i -60S N C = )i i (2
3B 3C N - 写成矩阵形式,得:
=
考虑变换前后电机总功率不变,在此前提下,可以证明,匝数比:
于是,就可以得到,
令——为从三相交流坐标系统换到两相交流坐标系的变换矩阵,则
令——为从两相交流坐标系变换到三相交流坐标系的变换矩阵(即的逆变换),则
2.3.3 两相静止——两相旋转坐标系变换(
写成矩阵形式,得
式中:
变换矩阵为:
逆矩阵为:
说明:1、其中角频率为电机旋转磁场的同步频率;
2、如果欲从α、β坐标系转换到d-q坐标系,只要把M和T 换成符号d和q,换成ω即可。
2.3.4 直角坐标/极坐标变换(K/P变换)
在图中令矢量()、(),求、,就是直角坐标/极坐标变换,简称K/P变换。显然,其变换式应为:
或
当在0-之间变换时,的变换范围是0-∞,这个变换幅度太大,很难在实际变换器中实现,因此常改用下列公式来表示的值:
= = = =
即有:
=2arctan或=2arctan
此式为使用的变换式。
2.3.5 三相异步电机在两相坐标系上的数学模型
由上述的内容可见,异步电机的数学模型非常复杂,坐标变换的一个重要目的就是简化异步电机的数学模型,式(2-18)的异步电机数学模型是建立在三相静止的ABC坐标系上的,如果把它变换到两相坐标系上,由于两相坐标轴还互相垂直,两相绕组之间没有磁耦合,仅此一点,就会使异步电机的数学模型简单了许多。
1、异步电动机在两相任意旋转坐标系(d-q坐标系)上
的数学模型。
两相坐标系可以是静止的,也可以是旋转的。其中以任意旋转的坐标系的情况是最一般的。有了这种情况下的数学模型,要求出某一具体的两相坐标系上的数学模型就比较容易了。
如图2-7(下页)所示,两相坐标系d轴与三相坐标系A轴的夹角为θ,而P θ=为d-q坐标系相对于定子的角转速,为d-q坐标系相对于转子的角转速。现在就要把三相静止坐标系上的电压方程[式(2-1)]、磁链方程[式(2-2)]和转矩方程[式(2-17)]都变换到两相旋转坐标系上来。
图2-7 三相坐标系与两相静止坐标系和两相任意旋转坐标系的关系
其变换过程如下:
根据图2-7,其变换过程为,可以先利用3/2变换将方
程式中定子和转子的电压、电流、磁链和转矩(即空间合成
磁势或者)都变换到αβ两相静止坐标系上,然后再
用旋转变换矩阵C/将这些变量都变换到两相旋转坐标
系上d-q上。具体的变换过程很复杂,这些不作具体介绍。
变换后得到的数学模型如下:
=...(2-34)
式中,定子各量均用下脚标1表示,转子各量均用2表示。 -q 坐标系定子与转子同轴等效绕组间的互感,): -d-q 坐标系定子等效绕组的自感,=
+: -d-q 坐标系转子等效绕组的自感,=
+ 应该指出,两相绕组互感
是原三相绕组中任意两相间最大互感(当轴线重合时)的3/2倍,这是因为两相取代了三相的缘故。
对比式(2-34)和式(2-1)可知,两相坐标系上的电压方程是四维的,它比三相坐标系上的6维电压方程降低了2维。
(2)磁连方程
数学模型简化的根本原因可从磁链
方程和图2—8所示的d-q 坐标系物理模型
上看出。
= …..(2-35)
或写成
1d Ψ
= S L +m L 1Ψq
= S L +m L …..(2-35a)
Ψ= m L+r L
d2
Ψ= m L+r L
q2
由于变换到d-q坐标系上以后,定子和转子等效绕组都落在两根轴上,而且两轴互相垂直,它们之间没有互感的耦合关系,互感磁链只在同轴绕组之间存在,所以式中的每个磁链分量只剩下两项了。可是,由于定、转子绕组与坐标轴之间都有相对运动,每轴磁通在与之垂直的绕组中还要产生旋转电动势,这些电动势顶都与相对转速
或成正比,且它们可以在式(2-34)所示的电压方程中找到。(3)转矩和运动方程
= (- ) = ……(2-36)
式中w = - , w为电机转子的叫转速。
式(2-34)和式(2-36)就是异步电机在d-q坐标系的数学模型。显然,它们比ABC三相坐标系上的数学模型简单得多,阶次也降低了。但是,它们的非线性、多变量、强耦合性质并未改变。
在电压方程式(2-34)等号右侧的系数矩阵中,含R项的,表示电阻压降,含项的,表示电感压降(即脉变电动势),含w项的,表示旋转电动势。为了使物理概念更清楚,可以把它们分开来写,并考虑到式(2-35)的磁链方程,即得:
= +
+
令:u=
I=
ψ=
R=
L =
旋转电动势矢量=
则式(2-37)可写成u=Ri+Lpi+…………..(2-37a)
将式(2-37a)、式(2-35)、式(2-36)画成如图2-9所示的多变量系统动态结构图。
图中,(·)表示表达式的非线性函数矩阵,(·)表示表达式的非线性函数,P为微分算子。
图2-9是异步电动机多变量控制结构(见图2-1)的具体体现。它表明异步电机的数学模型具有以下性质:
①、异步电机可以看做一个双输出系统,输入量是电压矢量u
和定子与d-q坐标轴的相对角转速(当d-q轴以同步转
速旋转时就等于定子输入角频率),输出量是磁链矢
量和转子角转速ω。电流矢量可以看作状态变量,它和磁
链矢量之间又有式(2-35)确定的关系。
②、非线性因素存在于(·)和(·)中,即存在于产生
旋转电动势和电磁转矩的两个环节上。除此以外,系统的其它部分之间都是线性关系,这和直流电机弱磁控制的情况相似。
③、多变量之间的耦合关系主要体现在旋转电动势上。如果忽
略旋转电动势的影响。系统便容易简化成单变量系统了。