三四等水准测量平差软件V1.6使用说明
《三、四等水准测量平差计算程序 V1.6》使用说明本程序编写目的为本人的水准平差计算,升级到 V1.4后,有数年未有升级,于近日打算做最后一次升级,以后将不会再升级了。
由于本人编程能力有限,使用的国产编程语言编写的程序,均被360杀毒软件误报。若是介意,请不要下载使用。本人也没有能力去编写 病毒木马。为了安全期间,请从本人QQ(QQ:389505708 了李李-测量)空间提供的下载地址下载,若是从其他地方下载,本人不能保证程序中会不会被有心之人加入病毒木马之类。
本程序特点如下:
1.绿色版,无需安装,打开即用。
2.完全按照 测量 教材中的表格编写,计算方法也同书上一样,进位采用“四舍五入”、“单进双不进”进位方法。
3.计算完成后,方便 继续进行 平差易 报告的平差。
4.说明很是详细,可以教新手在不影响最终成果的原则下完成一些数据的修改,以达到规范要求。
一.使用步骤
1.起始数据填写。
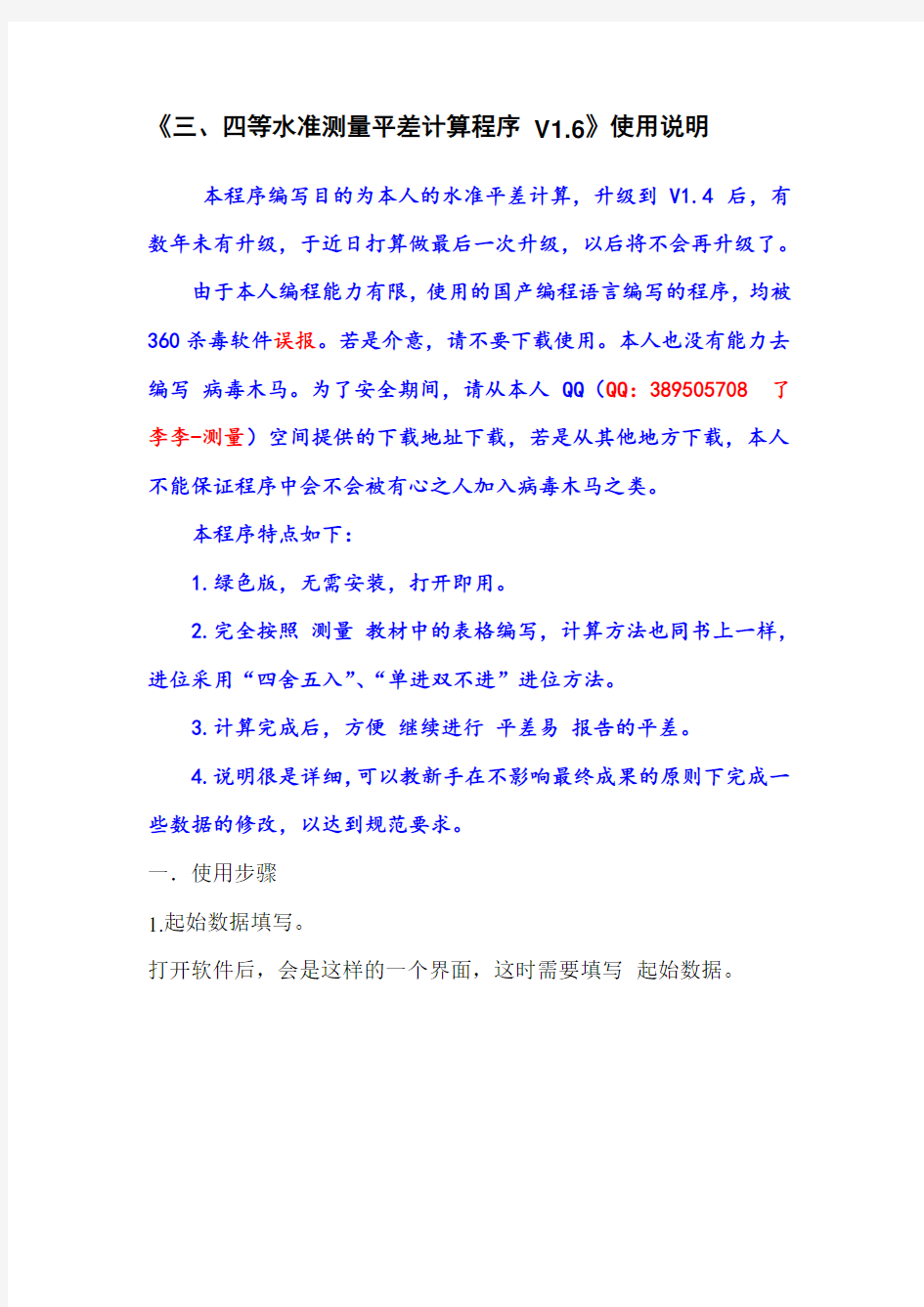
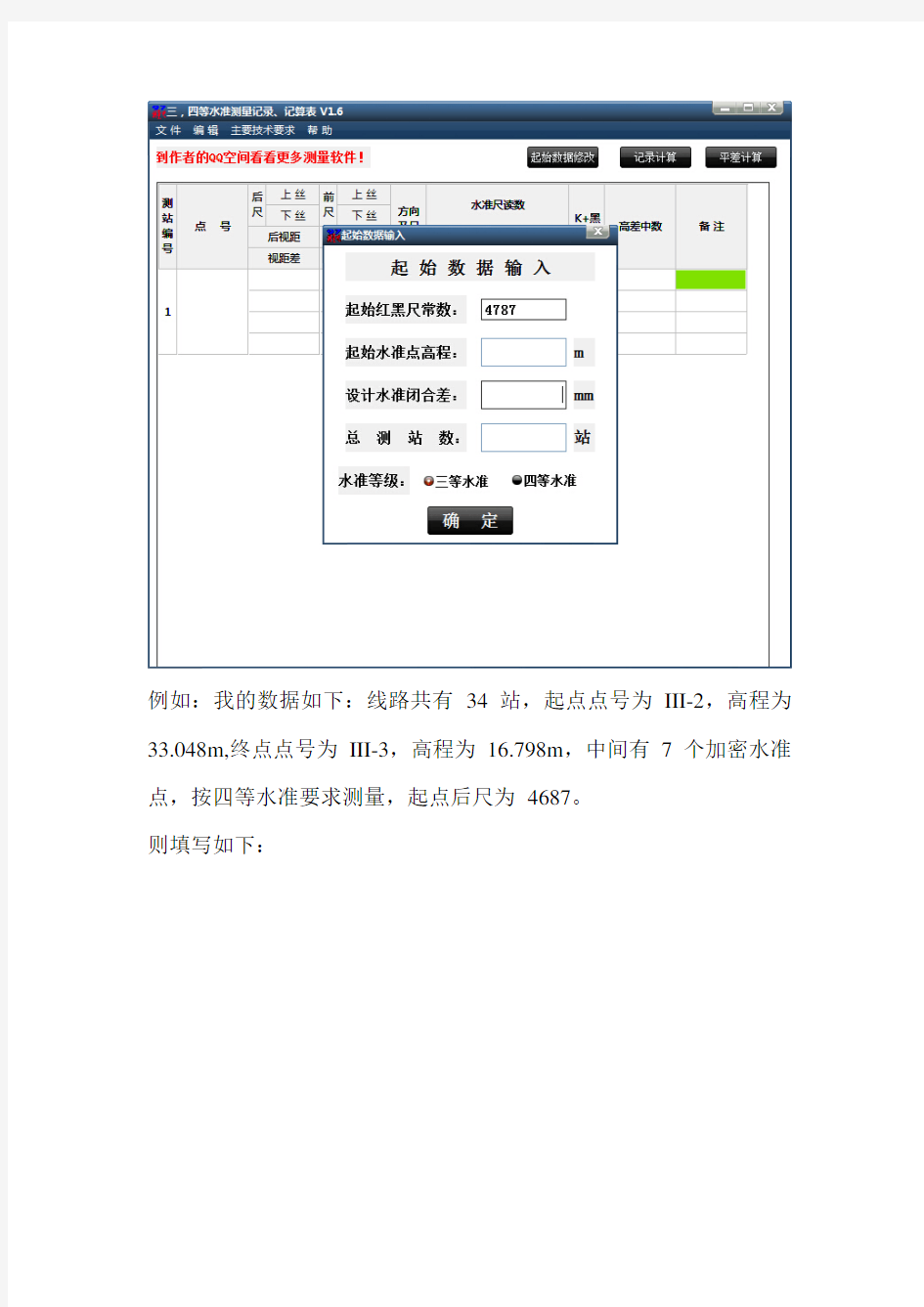
打开软件后,会是这样的一个界面,这时需要填写起始数据。
例如:我的数据如下:线路共有 34站,起点点号为III-2,高程为33.048m,终点点号为III-3,高程为 16.798m,中间有 7 个加密水准点,按四等水准要求测量,起点后尺为 4687。
则填写如下:
起始红黑尺常数:选择为 4687.
起始水准点高程:起点III-2 的高程:33.048
设计水准闭合差:(终点III-3的高程(m) - 起点III-2的高程(m))*1000=(16.798-33.048)*1000= -16.250*1000= -16250mm
此次线路为附合水准线路,若是闭合水准线路,则设计水准闭合差:为 0.
总测站数:总共测了 34 站。
水准等级:此次按四等水准,所以先择四等水准。
然后点击确定。
2.测量数据填写
在点击确定后,界面是这样的:
按照输入的起始数据,共有 34个测站。表格样式完全是照着测量数的教材编制,附带一个EXCEL 版的表格,两者完全一样。EXCEL表格样式如下:
本人的原始数据输入经验:
本人是先把原始数据输入在EXCEL 版表格中,然后再复制在软件中的,因为EXCEL版表格输入快速!
方法如下:
对照手写的原始记录表,一竖行一竖行的输入,每一测站的上下丝读数输完后,回车三下,输入下一测站上下丝读数,如此输入,直到一张手写记录输完,再换一个竖行,这样会快些。如图示:
只有到了水准点才写点号,中间的转点是不用写点号的!如果你连什么是转点都不知道,建议好好跟师傅学学,或者好好看看 测量学 之类 的书或百度 测量 PPT ,视屏。
还有,我发现一些新手 问我时,发来的原始数据, 在点号里 写的是 ZD1-ZD2,ZD2-BM1 这样的格式,在程序里 点号里这样写 ZD2,BM1,如果ZD2是转点,就不写。
例如:
特别说明:1.本程序此处输入的数据为 不带小数点,即单位为mm.
2.本程序不支持,从起点第一站就到一个水准点上的 这样的计算。最好是两站,才行。因为第一站的点号 写的是 起点的 点号,没有地方可以写 一站距离的第一个水准点号。如上图所示。
所在原始数据输入完成后,然后选中数据,复制(可以用 快捷键 Ctrl+C )如下图,
粘贴(可以用 快捷键 Ctrl+V )到程序中,一定要从什么位置 复制,
就从 什么位置 粘贴,如下图所示的,我从EXCEL表中的测站编号为 1 的那一单元格复制,粘贴在程序上时,也要先选中那一单元格,然后才粘贴。备注不用复制!
点击记录计算,进行数据计算。
点击限差检查,会按照起始数据中选择的四等水准要求检查。
根据规范检查出有以下超限:
为了给大家详细的介绍超限的修改。我把数据进行一些修改,让每
一项都超限,然后再一项项的来详细介绍修改。
5.超限修改
(1)测站最小读数超限
根据上图可以看出,第2,3 测站有四个读数小于四等水准规范要求的最小读数不得小于 0.20m.
修改方法如下:
整个测站全站加上 0.20m,使读数大于 0.20m. 记住,是整个测站,这样才能保证这个测站的高差没有改变,若是你只修改部分,则会改变该测站的高差,从而影响成果正确性。
看到没,整站修改,高差不变!
(2)视线长度超限
可以看出第 4 站,前后视长度分别为 103.6m,114m.长度超过了规范要求的小于100m. 可以修改的前提是水准仪 i 角非常非常小,修改方法如下:
视距长 = 上丝读数 - 下丝读数,则通过修改上下丝读数可以达到修改视线长度的目的。但上下丝读数不是乱改的,因为中丝读数 = (上丝读数 + 下丝读数)/2。中丝读数,我们是不能动的,那么问题来了,挖掘机技术哪家强?
只需使视距小于100m即可,最好是 98m左右,这样的话,对通过
距离平差的影响降到很小。如上数据,拟分别改为 98.6m,99.0m. 则后视上丝读数= 98.6 /2*10+1650 = 2143;
后视下丝读数=1650 - 98.6 /2*10 = 1157;
前视上丝读数= 99.0 /2*10+1923 = 2418;
前视下丝读数 =1923- 99.0 /2*10 = 1428;
修改过后,连累计视距差都不超限了。
(3)前后视距差超限及累计视距差超限
修改方法:
A.原因是因为某一站的前后视距差超限引起的,如(2)视线长度超限,则通过上一方法可消除。
B.是因为测站累计起来的,即每一测站的前后视距差都没超限,但合在一起就超限了,比如有5测站,前后视距差分别为 1.6,2.8,3.7,4.3,3.9.则需要把一些大的值改为相反符号的。则改为 -3.7,-4.3,修改数值方法如下,还是以98.6,99.0为例,原来的前后视距差为+0.4 ,现在想改为 -0.4.
则后视上丝读数= 99.0 /2*10+1650 = 2145;
后视下丝读数=1650 - 99.0/2*10 = 1155;
前视上丝读数= 98.6 /2*10+1923 = 2416;
前视下丝读数 =1923- 98.6 /2*10 = 1430;
(4)红黑面读数较差超限与红黑面高差较差超限
此时首先计算中丝读数与(上丝读数 - 下丝读数)/2 之差有没有在 3mm之内,若是不在,则表示你的中丝读数可能读错了。则需改正中丝读数,若是在,则调整红面读数。
若是你都没有记录上下丝读数,那么,要么你重测,要么你不在呼这点误差,还平差个毛线呀!
如果读数较差不超限,但高差较差超限。那还是按上面的方法调整吧!
5.平差计算
所有数据都没问题后,点击平差计算,弹出输入各水准点点号的提示。
若是点号都正常输入,点确定进入平差计算。
就可以看到对水准点之间的距离,测站数做了统计。
选择距离平差或测站平差,点击改正计算便可以得到平差后的高程。
汇总行:
实测高差为 -16241mm, 设计高差为 -16250mm, 则差值为 + 9 mm.需要改正 - 9mm. 最后高程列为平差后的高程。
若是需要出报告,则可以根据这个平差表,把距离,测站数,实测高差填入平差易2005,按照平差易的使用说明操作就可以出一份水准控制测量报告了!
6.文件保存及读取
(1) 保存
点击菜单栏的文件会下拉出保存,点击后会弹出如下窗口,选择好保存位置和输入欲保存的文件名(如输入 111 ),不需输入文件格式名(此版本之前的版本是需要的,如需输入 111.dsz)如果输入成了 111,打开时需把文件类型选择为)
(2) 打开
点击菜单栏的文件会下拉出打开,点击后会弹出如下窗口,选择文件保存位置打开即可。
若是之前版本保存的,保存时又忘了输入格式名,则在文件类型选为所有文件(*.*),这样就可以看到原来保存的数据了!
打开后,还是原来的配方,熟悉的味道!
精密导线测量实习报告--五组
. .. . 石铁路院校区基础控制测量 技术设计书 系别:测绘工程系 班级:工1202班 组名:第五组 组长:孟 组员:王颖、瑶瑶、臧阔 、磊 指导老师:周淑波 铁路职业技术学院 2014年6月8日
目录 一、实验项目 (3) 二、实验目的 (3) 三、实验仪器 (3) 四、实验原理和导线测量技术要求 (3) 五、实验容步骤 (5) 六、实验结论 (6) 七、附表 (14) 八、总结 (17)
一、实验项目 精密导线测量的方法及数据处理。 导线——测区相邻控制点连成直线而构成的连续折线(导线边)。 导线测量——在地面上按一定要求选定一系列的点依次相邻,次序连成折线,并测量各线段的边长和转折角,再根据起始数据确定各点平面位置的测量方法。 主要用于带状地区、隐蔽地区、城建去、地下工程、公路、铁路等控制点的测量。导线的布设形式有:符合导线、闭合导线、支导线和导线网,这次布设形式为闭合导线。 二、实验目的 1了解精密导线测量的方法; 2学会精密导线测量的数据处理方法; 3学会使用科傻平差软件。 三、实验仪器 精密导线所需要的仪器有:南方全站仪一台,棱镜两个,记录板一个,三脚架三
个。 四、实验原理和导线测量技术要求 1.导线布设形式,根据测区的大小情况要求,导线可布设成以下三种: 1)闭合导线 2)附合导线 3)支导线 2.城市或工程测量导线测量技术指标 注意: 1.可以角度和边长分别测量,也可同时测量。 2.导线点要保存好,作为下次精密水准的水准点,两次实验的成果构成一个完整的二级导线控制成果。 3.本次实验可选二级导线,以校园I级(一级)导线点为已知点,布设平均边长约为200米的II级(二级)不少于四个,构成闭合或附合导线。
平差易软件数据输入实例
导线实例 这就是一条符合导线的测量数据与简图,A、B、C与D就是已知坐标点,2、3与4就是待测的控制点。 测站点角度(°′″) 距离(米) X (米) Y(米) B 8345、8709 5216、6021 A 85、30211 1474、4440 7396、2520 5530、0090 2 254、32322 1424、7170 3 131、04333 1749、3220 4 272、20202 1950、4120 C 244、18300 4817、6050 9341、4820 D 4467、5243 8404、7624 导线原始数据表 导线图如下: 导线图 在平差易软件中输入以上数据,如下图“数据输入”所示:
数据输入 在测站信息区中输入A、B、C、D、2、3与4号测站点,其中A、B、C、D为已知坐标点,其属性为10,其坐标如“原始数据表”;2、3、4点为待测点,其属性为00,其它信息为空。如果要考虑温度、气压对边长的影响,就需要在观测信息区中输入每条边的实际温度、气压值,然后通过概算来进行改正。 根据控制网的类型选择数据输入格式,此控制网为边角网,选择边角格式。 如下图“选择格式”所示: 选择格式 在观测信息区中输入每一个测站点的观测信息,为了节省空间只截取观测信息的部分表格示意图,如下表 B、D作为定向点,它没有设站,所以无观测信息,但在测站信息区中必须输入它们的坐标。 以A为测站点,B为定向点时(定向点的方向值必须为零),照准2号点的数据输入如下图“测站A的观测信息”所示: 测站A的观测信息 以C为测站点,以4号点为定向点时,照准D点的数据输入如下图“测站C的观测信息”所示: 测站C的观测信息 2号点作为测站点时,以A为定向点,照准3号点,如下图“测站2的观测信息”所示: 测站2的观测信息 以3号点为测站点,以2号点为定向点时,照准4号点的数据输入如下图“测站3的观测信息”所示: 测站3的观测信息 以4号点为测站点,以3号点为定向点时,照准C点的数据输入如下图“测站4的观测信息”所示:
科傻GPS平差软件说明书
科傻系统(COSA)系列软件GPS工程测量网 通用平差软件包(CosaGPS V5.1) 使用说明书 2007年11月
所有不得翻录Tel: Email: https://www.360docs.net/doc/db10183095.html, https://www.360docs.net/doc/db10183095.html,
目录 目录 (1) 1.简介 (3) 1.1 功能全面 (3) 1.2 整体性好 (3) 1.3 解算容量大,运算速度快 (3) 1.4 操作简明,使用方便 (4) 2.“文件”下拉菜单 (6) 2.1 工程与文件 (6) 2.2 “文件”菜单项 (8) 2.2.1新建 (8) 2.2.2打开 (9) 2.2.3关闭 (9) 2.2.4保存 (9) 2.2.5另存为 (9) 2.2.6新建工程 (9) 2.2.7 打开工程 (15) 2.2.8 打印 (16) 2.2.9 打印预览 (16) 2.2.10 打印设置 (16) 2.2.11 退出 (16) 3.“GPS数据处理”下拉菜单 (17) 3.1 已知数据 (17) 3.1.1 三维已知坐标 (18) 3.1.2 二维已知坐标 (19) 3.1.3 一维高程点 (19) 3.1.4 输入地面边长 (19) 3.1.5 输入地面方位 (20) 3.2 基线数据 (20) 3.3 GPS三维向量网平差(无约束平差或约束平差) (21) 3.4 二维网联合/约束平差 (22) 3.4.1 联合/约束平差 (22)
3.4.2 输出用户自定义任意两点相对精度 (23) 3.5 椭球面上三维平差 (23) 3.6 工程网(一点一方向)平差 (24) 3.7 GPS高程拟合 (25) 3.8 GPS三维秩亏自由网平差 (26) 3.9 稳定性分析 (27) 3.10 设置 (28) 4.“查看”下拉菜单 (28) 5.“工具”下拉菜单 (29) 5.1 闭合差计算 (30) 5.2 重复基线差 (30) 5.3 网图显绘 (31) 5.4 贯通误差影响值计算 (31) 5.5 GPS网设计 (32) 5.6 输出AutoCAD格式的GPS网图 (33) 6.“坐标转换”下拉菜单 (34) 6.1 XYZ-〉BLH (34) 6.2 BLH->XYZ (35) 6.3 BL->XY (36) 6.4 XY->BL (36) 6.5 XY1->XY2 (37) 6.6 XYZ1->XYZ2 (39) 6.7 高程面坐标变换 (41) 7.“帮助”下拉菜单 (42) 附录1. 功能菜单框图 (43) 附录2. 算例及说明 (44) 附录3. 基线解文件格式说明 (46) 附录4. 方向及经纬度的角度格式说明 (54) 附录5. 简要操作步骤 (55)
三四等水准测量步骤
三、四等水准测量 控制测量除了要完成平面控制测量外,还要进行高程控制测量。小区域地形测图或施工测量中,多采用三、四等水准测量作为高程控制测量的首级控制。 一、三、四等水准测量(leveling)的技术要求 1、高程系统:三、四等水准测量起算点的高程一般引自国家一、二等水准点,若测区附近没有国家水准点,也可建立独立的水准网,这样起算点的高程应采用假定高程。 2、布设形式:如果是作为测区的首级控制,一般布设成闭合环线;如果进行加密,则多采用附合水准路线或支水准路线。三、四等水准路线一般沿公路、铁路或管线等坡度较小、便于施测的路线布设。 3、点位的埋设:其点位应选在地基稳固,能长久保存标志和便于观测的地点,水准点的间距一般为1—1.5km,山岭重丘区可根据需要适当加密,一个测区一般至少埋设三个以上的水准点。 4、三、四等及五等水准测量的精度要求和技术要求列于表中。
二、三、四等水准测量的观测方法 三、四等水准测量观测应在通视良好、望远镜成像清晰及稳定的情况下进行。一般采用一对双面尺。 1、三等水准一个测站的观测步骤:(后-前-前-后;黑-黑-红-红) (1)照准后视尺黑面,精平,分别读取上、下、中三丝读数,并记为(1)、(2)、(3)。 (2)照准前视尺黑面,精平,分别读取上、下、中三丝读数,并记为(4)、(5)、(6)。 (3)照准前视尺红面,精平,读取中丝读数,记为(7) (4)照准后视尺红面,精平,读取中丝读数,记为(8) 这四步观测,简称为“后一前一前一后(黑一黑一红一红)”,这样的观测步骤可消除或减弱仪器或尺垫下沉误差的影响。对于四等水准测量,规范允许采用“后一后一前一前(黑一红一黑一红)”的观测步骤。
coswin说明书平差软件定稿版
c o s w i n说明书平差软 件 HUA system office room 【HUA16H-
前言 “地面测量工程控制与施工测量内外业一体化和数据处理自动化系统”(简称科傻系统)将测量基本原理和现代科技相结合,对电子全站仪、电子水准仪以及常规地面测量仪器进行系统的开发,以地面控制测量、施工测量和碎部测量等测量工程为对象,实现从外业数据采集、质量检核、预处理到内业数据处理、成果报表输出的一体化和自动化作业流程。 该系统由两个子系统组成:“基于掌上型电脑的测量数据采集和处理系统”(简称COSA-HC),在掌上型电脑RD-EB2上运行,能自动控制和引导整个作业过程并进行质量检测,一体化程度高,操作方便。该子系统具有水准测量、二、三维控制、碎部测量、道路测设、工程放样等测量作业模块;具
有小规模水准网、二、三维工程网的平差功能;具有文件管理和数据通信功能;该系统灵活方便,适合外业环境。 “地面测量工程控制测量数据处理通用软件包”(简称CODAPS或COSAWIN)在微机WINDOWS环境下运行即可独立使用,也可与COSA-HC联合使用,对RD-EB2传输过来的原始观测数据进行转换,完成从概算到平差的数据自动化处理,同时具有粗差探测与剔除、方差分量估计、闭合差计算、贯通误差影响值估算、报表打印、网图显绘、坐标转换与换带计算、控制网优化设计以及叠置分析等功能。 本手册是为COSAWIN用户专门编写的,若有疏漏和不当之处,敬请读者提出宝贵意见和批评指正。 武汉测绘科技大学武地课题组
2000.5.
第一章概述 1.1 系统简介 科傻系统(COSA)是“地面测量工程控制与施工测量内外业一体化和数据处理自动化系统”的简称,包括COSAWIN和COSA-HC两个子系统。COSAWIN在IBM兼容机上运行。 COSAWIN系统除具有概算、平差、精度评定及成果输出等功能外,还提供了许多实用的功能,如网图
四等水准平差报告
-- NASEW V3.0 -- ** 控制网概况 ** 1. 本成果为按[ 高程 ]网处理的[ 平差 ]成果 数据库为: C:\NAS\0521.OBS 2. 控制网中: 直高间高 H点 待定 9 0 8 固定 0 0 2 特类 0 0 0 3. 平差前后基本观测量中误差情况: 观测值平差前平差后 直接高差: 0.006666 0.001344 4. 控制网中最大误差情况: 最大点位误差 = 0.00163米 最大点间误差 = 0.00174米 观测:何成斌记录:陆清普欧阳全 平差:何成斌检查:张德军 测量时间:2013年5月21日 [水准测量成果表] ======================================================================== 前视点后视点高差值改正数改正后值路线长备注 -----------+-----------+---------+---------+---------+---------+-------- 29III177 II52 -6.7960 -0.0006 -6.7966 1218 II52 II53 -0.4265 -0.0001 -0.4266 140 II53 T7 0.3515 -0.0001 0.3514 244 T7 T8 0.7785 -0.0000 0.7785 72
T8 T4 -9.0910 -0.0015 -9.0925 2962 T4 T3 0.4935 -0.0001 0.4934 100 T3 II10 0.2635 -0.0000 0.2635 96 II10 T1 -0.6825 -0.0001 -0.6826 112 T1 29III176 8.9125 -0.0009 8.9116 1838 [和]=0 段数=0 ======================================================================== [高差误差表] ================================================================ 点名点名高差中误差高差备注 -----------+-----------+---------+---------+-------------------- 29III177 II52 0.0013 -6.7966 II52 II53 0.0005 -0.4266 II53 T7 0.0007 0.3514 T7 T8 0.0004 0.7785 T8 T4 0.0017 -9.0925 T4 T3 0.0004 0.4934 T3 II10 0.0004 0.2635 II10 T1 0.0004 -0.6826 T1 29III176 0.0016 8.9116 ================================================================ [高程成果表] ======================================================================== 点名等级标石 H MH 备注 ---------+-----+-------+-----------+-----------+------------------------ 29III177 57.765 固定点 II52 50.968 0.001 II53 50.542 0.001 T7 50.893 0.001 T8 51.672 0.002 T4 42.579 0.002 T3 43.073 0.002
水准网间接平差程序设计(C++)
//////////////////////////////////////////////////// // visual C++6.0 编译通过// //////////////////////////////////////////////////// /////////////////////////////////////////////////// // 参考资料// // 部分网络资料// // 宋力杰《测量平差程序设计》// //姚连壁《基于matlab的控制网平差程序设计》// /////////////////////////////////////////////////// #include
三四等水准测量计算
三、四等水准测量施测方法 1、一个测站上的观测顺序 (1)瞄准后视尺黑面,读取下丝、上丝读数; (2)瞄准后视尺红面,读取中丝读数; (3)瞄准前视尺黑面,读取下丝、上丝读数; (4)瞄准前视尺红面,令气泡重新准确符合,读取中丝读数。 以上四等水准每站观测顺序简称为后(黑)——后(红)——前(黑)——前(红)。对于三等水准测量,应按后(黑)——前(黑)——前(红)——后(红)的顺序进行观测。 2、测站上的计算及校核 (1)视距部分 后距=[(1)项—(2)项]×100,记入第(9)项; 前距=[(5)项—(6)项]×100,记入第(10)项; 后、前距差d=(9)项—(10)项,记人第(11)项; 后、前距差累积值∑d=本站(11)+前站(12),记入第(12)项。 四等水准测量记录
(2)高差部分 四等水准测量采用双面水准尺,因此应根据红、黑面读数进行下列校核计算: A、理论上讲,同一把水准尺的黑面读数十K值减去红面读数应为零。 即: 后视尺(3)项+K—(4)项=(13)项; 前视尺(7)项+K—(8)项=(14)项; 其中K为水准尺红、黑面起始读数的差值,系一常数值。在本例中47号尺的K=4.787米;46号尺的K=4.687米。由于测量有误差,(13)项和(14)项往往不为零,但其不符值不得超过±3毫米(三等水准不得超过±2毫米)。 B、理论上讲,用黑面尺测得的高差与用红面尺测得的高差应相等。 (3)项—(7)项=(15)项(黑面尺高差);
(4)项—(8)项=(16)项(红面尺高差)。 因为两把尺的红面起始读数各为4.787米和4.687米,两者相差0.1米,所以理论上在(16)项上加或减去0.1米之后与(15)项之差应为零,但由于测量有误差,往往不为零,其不符值不得超过±5毫米(三等水准不得超过±3毫米),并记入第(17)项。 (17)项=(15)项—[(16)项±0.1米] 表中第(17)项除了检查用黑、红面测得的高差是否合乎要求外,同时也用作检查计算是否有误,这是因为: (17)项=(15)项—[(16)项±0.1米]=(13)项—(14)项 当以上计算合格后,再按下式计算出高差中数: 高差中数(18((15)项+(16)项±0.1米)
固原至王洼铁路复测报告
新建铁路原州区至王洼(起点至程儿山隧道出口段) 控制网复测报告 甘肃铁道综合工程勘察院有限公司 二〇一五年一月兰州
新建铁路原州区至王洼(起点至程儿山隧道出口段) 控制网复测报告 编写: 复核: 审批: 甘肃铁道综合工程勘察院有限公司 二〇一五年一月
目录 1.控制网概况 (1) 2.复测依据 (1) 3. 复测工作内容 (1) 4.复测工作开展 (1) 4.1投入测量仪器 (1) 4.2投入测量人员 (2) 5.平面坐标和高程系统 (2) 5.1控制网复测 (2) 5.2控制网复测实施 (2) 6. GPS内业处理 (4) 7. 控制网复测成果分析及结论 (6) 7.1 控制网复测成果判别方法 (6) 7.2 相邻点间坐标差之差的相对精度统计 (6) 7.3复测与原测坐标成果比较 (8) 7.4平面控制网复测结论 (10) 8. 高程控制网复测 (10) 8.1四等水准测量主要技术要求 (10) 8.2四等水准测量外业测量 (11) 8.3四等水准复测与原成果比较分析 (11) 9.完成复测工作量 (12) 10.附件报告 (12) 10.1 控制点成果表 (13) 10.2 GPS 二维网平差报告 (14) 10.3高程平差报告 (23) 11.测量仪器鉴定证书 (25)
新建铁路原州区至王洼(起点至程儿山隧道段)[控制网复测报告] 新建铁路原州区至王洼 (起点~程儿山隧道出口) 控制网复测报告 1.控制网概况 原州区至王洼铁路控制网的布设由设计单位按分级布网的原则,分别布设四等GPS平面网和四等水准高程网,前期主要复测起点至程儿山隧道控制网,并对程儿山隧道进出口及斜井布设的加密点进行了联测。 2.复测依据 (1)《铁路工程测量规范》(TB10101-2009); (2)《国家三、四等水准测量规范》(GB/T12898-2009); (3)《铁路工程卫星定位测量规范》(TB10054-2010); (4)《全球定位系统(GPS)测量规范》(GB/T 18314-2009); (5)《新建铁路固原至王洼专用线控制测量成果书》(铁一院2010.5)。 3. 复测工作内容 本次共复测GPS平面点11个,GPS加密点共5个,联测国家三角点2个,四等水准高程点共13个。为保证路线的整体贯通及达到设计规范要求精度以及铁路线上工程线形顺畅,对原有GPS点及加密点进行复测,对破坏的GPS点根据现场需要进行恢复,恢复GPS点4个,分别是XGPS03、XGPS04、XGPS5-1、XGPS08;恢复四等水准点1个,为XBM02。GPS平面点按铁路四等GPS网精度标准执行。高程控制网按《国家三、四等水准测量规范》四等水准测量的精度标准执行。 4.复测工作开展 4.1投入测量仪器 序号设备名称型号数量(台) 检定情况 1 GPS 天宝5800 10 已检定 2 全站仪徕卡 TS30 1 已检定 3 水准仪徕卡 DNA03 4 已检定 以上测量仪器均经检定中心鉴定合格,并在有效期内,可用于相应等级精度要求的测量工作。 1
水准路线平差计算程序
水准路线平差计算程序 一.基本概念 在施工过程中,水准测量贯穿着始终 水准测量一般分为三种类型 1.附合水准线路 从一高级水准点起,经过1、2、3…..n一系列测站测设到另一高级水准点 2.闭合水准线路 从一高级水准点起,经过1、2、3…..n一系列测站测设到原起点高级水准点 3.支水准线路 从一高级水准点起,经过1、2、3…..n一系列测站测设到另一未知水准点在施工过程中,我们一般常用到附合水准、闭合水准,因为这两种水准测量可以检验我们测量成果的精度和正确性。支水准则不然,所以不建议使用支水准。本程序重点考虑附合水准、闭合水准两种情况。 二.程序清单(主程序文件名:SZPC) 适用于CASIO fx-4850p A〝BMA〞:B〝BMB〞: C〝∑(NI,DI)〞: D〝∑(HAB)〞 A:〝fh=〞:E=D+A-B◢ Lbl 1 {FG}:F〝NN,DN〞:G〝hN〞 A:〝BMN〞:H=-EE÷C+G+A◢ A=H Goto 1 适用于CASIO fx-4800p A〝BMA〞:B〝BMB〞: C〝∑(NI,DI)〞: D〝∑(HAB)〞 E〝fh〞=D+A-B◢ Lbl 1 {FG}:F〝NN,DN〞:G〝hN〞 H〝BMN〞=-EE÷C+G+A◢ A=H Goto 1 三.程序算例及相关操作说明 1.程序算例(例一) 已知某附合水准路线的测量资料,见图一和表6-3,求各待定点的高程。 图一
2.操作步骤 程序文件名:SZPC 输入: BMA=56.345 BMB=59.039 ∑(NI,DI)=54 ∑(HAB)=2.741 出:fh=0.047 输入NN,DN=12,Hn=2.785;出:BMN=59.120 输入NN,DN=18,Hn=-4.369;出:BMN=54.735 输入NN,DN=13,Hn=1.980;出:BMN=56.704 输入NN,DN=11,Hn=2.345;出:BMN=59.039 3.程序算例(例二) 已知某闭合水准路线的测量资料,见图二和表6-4,求各待定点的高程。 图二
四等水准测量技术总结
四等水准测量技术总结 篇一:四等水准测量的实习报告 四等水准测量的实习报告 一.实习的目的和要求 目的: (1)进一步熟练水准仪的操作,掌握用双面水准尺进行四等水准测量的观测、 记录与计算方法。 (2)熟悉四等水准测量的主要技术指标,掌握测站及线路的检核方法。要求: 四等水准测量技术要求 二.仪器和工具 dS3水准仪1台,双面水准尺2支,尺垫2个,记录板2块. 三.实验步骤 1.了解四等水准测量的方法 双面尺法四等水准测量是在小地区布设高程控制网的常用方法,是在每个测量站上安置一次水准仪,但分别在水准尺的黑、红两面刻划上读数,可以测得两次高差,进行测站检核。除此以外,还有其他一系列的检核。 2.四等水准测量的实验
(1)从某一已知高程水准点出发,选定一条闭合水准路线,设置4站。 (2)安置水准仪的测站至前、后视立尺点的距离,应该用步测使其相等。 在每一测站,按下列顺序进行观测: ①后视水准尺黑面,读取上、下视距丝读数,精平,读取中丝读数; ②前视水准尺黑面,读取上、下视距丝读书,精平,读取中丝读数; ③前视水准尺红面,精平,读取中丝读数; ④后视水准尺红面,精平,读取中丝读数。 (3)记录着在“四等水准测量记录”表中按表头表明次序(1)~(8)记录各个读数,(9)~(10)为计算结果: 后视距离:(9)=100×{(1)-(2)} 前视距离:(10)=100×{(4)-(5)} 前、后视距之差:(11)=(9)-(10) 前、后视距离累积差(即Σ视距差):(12)=上站(12)+本站(11) 红黑面差:(13)=(6)+K-(7), (14)=(3)+K-(8),(K=4.687或4.787) 黑面高差:(15)=(3)-(6) 红面高差:(16)=(8)-(7) 红黑面高差之差:(17)=(15)-(16)=(14)-(13) 平均高差:(18)=1/2{(15)+(16)} 每站读数结束((1)~(8)),随即进行各项计算((9)~(16)),
MATLAB水准网间接平差课程作业程序
条件平差 A=[1 -1 0 0 1 0 0;0 0 1 -1 1 0 0;0 0 1 0 0 1 1;0 1 0 -1 0 0 0]; Q=diag(s); W=zeros(4,1); W(1)=h(1)-h(2)+h(5); W(2)=h(3)-h(4)+h(5); W(3)=h(3)+h(6)+h(7); W(4)=h(2)-h(4)+H(1)-H(2); W=W.*1000; Naa=A*Q*(A'); K=-1.*inv(Naa)*W; V=Q*(A')*K; L=h'+V./1000; X=zeros(1,3); X(1)=H(1)+L(1); X(2)=H(1)+L(2); X(3)=H(2)-L(7); ZWC=sqrt(V'*inv(Q)*V/4); QLL=Q-Q*A'*inv(Naa)*A*Q; ZWC_h5=ZWC*sqrt(QLL(5,5)); 间接平差 h1=1.359; h2=2.009; h3=0.363; h4=1.012; h5=0.657; h6=0.238; h7=-0.595; H1=5.016 H2=6.016 h=[h1 h2 h3 h4 h5 h6 h7]' s=[1.1 1.7 2.3 2.7 2.4 1.4 2.6]' B=[1 0 0 ;0 1 0; 1 0 0;0 1 0 ; -1 1 0 ; -1 0 1 ;0 0 -1 ] p=diag(1./s) l=[0;0;4;3;7;2;0] W=B'*p*l Nbb=B'*p*B x=inv(Nbb)*W V=(B*x-l) H=h+V/1000 Q=inv(Nbb) n=7;
COSA(科傻)-CODAPS软件说明包教学版
科傻系统系列软件之二 (CODAPS 2003) 地面测量工程控制测量数据处理通用软件包 Version 5.0 武地课题组 2003.1.武汉
前言 (1) 第一章概述 (3) 1.1 系统简介 (3) 1.2 安装及运行 (3) 1.3 快速入门 (5) 第二章平差 (10) 2.1 控制网观测值文件 (10) 2.2 控制网平差 (20) 2.3 设置与选项 (23) 2.4 生成概算用文件 (32) 2.5 附加信息文件 (33) 第三章工具 (34) 3.1 平面闭合差计算 (34) 3.2 高程闭合差计算 (36) 3.3贯通误差影响值计算 (36) 3.4图形显绘 (38) 3.5斜距化平 (38) 3.6手簿通讯 (40) 3.7格式转换 (41) 3.8叠置分析 (41) 第四章粗差探测、剔除和方差分量估计 (43) 4.1粗差探测与剔除 (43)
4.2方差分量估计 (48) 第五章网的模拟计算和优化设计 (50) 5.1生成正态标准随机数 (50) 5.2网的模拟计算 (50) 5.3平面网优化设计 (58) 第六章报表输出 (60) 6.1原始数据报表 (60) 6.2 平差结果报表 (67) 第七章坐标转换 (70) 7.1 XYZ-〉BLH (70) 7.2 BLH->XYZ (71) 7.3 XY->BL (72) 7.4 BL->XY (73) 7.5 XY1->XY2 (73) 7.6 XY1->XY2 (74) 附录2 CODAPS的文件组织 (76) 1平面控制网 (76) 2 水准(高程)网 (77) 3 GPS网 (78) 附录3 所附实例文件目录 (80) 附录4 有关参考文献 (83) 附录5 有关获奖情况 (87)
cosawin98说明书(平差软件)
前言 “地面测量工程控制与施工测量内外业一体化和数据处理自动化系统”(简称科傻系统)将测量基本原理和现代科技相结合,对电子全站仪、电子水准仪以及常规地面测量仪器进行系统的开发,以地面控制测量、施工测量和碎部测量等测量工程为对象,实现从外业数据采集、质量检核、预处理到内业数据处理、成果报表输出的一体化和自动化作业流程。 该系统由两个子系统组成:“基于掌上型电脑的测量数据采集和处理系统”(简称COSA-HC),在掌上型电脑RD-EB2上运行,能自动控制和引导整个作业过程并进行质量检测,一体化程度高,操作方便。该子系统具有水准测量、二、三维控制、碎部测量、道路测设、工程放样等测量作业模块;具有小规模水准网、二、三维工程网的平差功能;具有文件管理和数据通信功能;该系统灵活方便,适合外业环境。 “地面测量工程控制测量数据处理通用软件包”(简称CODAPS或COSAWIN)在微机WINDOWS环境下运行即可独立使用,也可与COSA-HC 联合使用,对RD-EB2传输过来的原始观测数据进行转换,完成从概算到平差的数据自动化处理,同时具有粗差探测与剔除、方差分量估计、闭合差计算、贯通误差影响值估算、报表打印、网图显绘、坐标转换与换带计算、控制网优化设计以及叠置分析等功能。 本手册是为COSAWIN用户专门编写的,若有疏漏和不当之处,敬请读者提出宝贵意见和批评指正。 武汉测绘科技大学武地课题组 2000.5.
第一章概述 1.1 系统简介 科傻系统(COSA)是“地面测量工程控制与施工测量内外业一体化和数据处理自动化系统”的简称,包括COSAWIN和COSA-HC两个子系统。COSAWIN在IBM兼容机上运行。 COSAWIN系统除具有概算、平差、精度评定及成果输出等功能外,还提供了许多实用的功能,如网图显绘、粗差剔除、方差分量估计、贯通误差影响值计算及闭合差计算等。 该系统不同于其它现有控制网平差系统的最大特点是自动化程度高,通用性强,处理速度快,解算容量大。其自动化表现在通过和COSA子系统COSA-HC相配合,可以做到由外业数据采集、检查到内业概算、平差和成果报表输出的自动化数据处理流程;其通用性表现在对控制网的网形、等级和网点编号没有任何限制,可以处理任意结构的水准网和平面网,无须给出冗余的附加信息;其解算速度快,解算容量大表现在采用稀疏矩阵压缩存储、网点优化排序和虚拟内存等技术,在主频166MHZ的586微机上,解算500个点的平面和水准控制网不到1分钟;在具有20MB剩余硬盘空间的微机上,可以解算多 2
四等水准测量步骤
三、四等水准测量(2008-10-10 23:27:42) 标签:教育 三、四等水准测量 控制测量除了要完成平面控制测量外,还要进行高程控制测量。小区域地形测图或施工测量中,多采用三、四等水准测量作为高程控制测量的首级控制。 一、三、四等水准测量(leveling)的技术要求 1、高程系统:三、四等水准测量起算点的高程一般引自国家一、二等水准点,若测区附近没有国家水准点,也可建立独立的水准网,这样起算点的高程应采用假定高程。 2、布设形式:如果是作为测区的首级控制,一般布设成闭合环线;如果进行加密,则多采用附合水准路线或支水准路线。三、四等水准路线一般沿公路、铁路或管线等坡度较小、便于施测的路线布设。 3、点位的埋设:其点位应选在地基稳固,能长久保存标志和便于观测的地点,水准点的间距一般为1—1.5km,山岭重丘区可根据需要适当加密,一个测区一般至少埋设三个以上的水准点。 4、三、四等及五等水准测量的精度要求和技术要求列于表中。 二、三、四等水准测量的观测方法 三、四等水准测量观测应在通视良好、望远镜成像清晰及稳定的情况下进行。一般采用一对双面尺。 1、三等水准一个测站的观测步骤:(后-前-前-后;黑-黑-红-红) (1)照准后视尺黑面,精平,分别读取上、下、中三丝读数,并记为(1)、(2)、(3)。 (2)照准前视尺黑面,精平,分别读取上、下、中三丝读数,并记为(4)、(5)、(6)。 (3)照准前视尺红面,精平,读取中丝读数,记为(7) (4)照准后视尺红面,精平,读取中丝读数,记为(8) 这四步观测,简称为“后一前一前一后(黑一黑一红一红)”,这样的观测步骤可消除或减弱仪器或尺垫下沉误差的影响。对于四等水准测量,规范允许采用“后一后一前一前(黑一红一黑一红)”的观测步骤。 2、一个测站的计算与检核:
一级导线指导书
一级导线指导书 1、概况 京石高速铁路客运专线已经于2006年2月通过了国家发改委审批,建设总工期4年,预计2012年全线通车。设有六个站,北京西—涿州—徐水—保定—定州—石家庄东。设计时速350公里/小时。全长281 公里。本单位承包工程量8公里。 1、本工程收集到国家GPS点4个点作为本工程平面控制起算点。 2、本工程收集到Ⅲ等水准点15个,系珠基高程系成果,作为本工程高程控制起算点。 2、控制点交接桩概述 2.1地形踏勘 2.2控制桩情况:1完好控制桩占90%,2丟损控制桩占4%,松动控制桩占6% 3、作业队伍情况 为确保本次复测的准确性和高效性,我院派出精兵强将,由项目长亲自挂帅,由较强作业能力的工程技术人员5名,辅助技术员4名组成复测小组,从事复测工作;由10名技术人员进行地形测量工作,工程处长带队,工程师1名,技术员3名,技术熟练的辅助工12名从事外业测量和内业整理工作。 此次作业于2006年8月进驻测区,共投入人员68人,全站仪6台,汽车3部,计算机8台,绘图仪1台。2004开思软件8套。
4、仪器设备 全站仪:Leica (徕卡),角度测量精确度±2″,距离测量精确度±2mm +2ppm(已检核),基座(经检核所有基座都满足要求),气象表,温度计,脚架,棱镜,手持GPS 5、规范 5.1城市测量规范(C118/99) 5.2工程测量规范(GB50026/93) 6、技术要求 6.1一级导线测量的技术要求 光电测距导线的主要技术要求应符合表一二三的规定。 表一,光电测距导线的水平角技术要求
注:n为测站数。 表二,光电测距导线的竖直角技术要求 表三,光电测距导线的测距技术要求 6.2每条边量测测站一端的气象数据。温度取位至0.5℃,气压取位至100pa 或1mmHg(所使用的气象仪器应在检定的使用有效期内)。 导线边长应进行加常数、乘常数、气象、倾斜改正以及高程归化和投影改化等各项改正计算。
水准网平差软件使用说明
电子水准仪数据处理及平差软件 用户操作手册 中铁二院工程集团有限责任公司 二零零九年
目录 1引言 (1) 1.1 编写目的 (1) 1.2 背景 (1) 2软件的功能和性能 (1) 2.1 软件功能和适用范围 (1) 2.1.1软件的主要功能有: (1) 2.1.2软件的主要输出内容包括: (1) 2.2 软件的性能 (2) 3运行环境 (2) 3.1 硬件设备 (2) 3.2 支持软件 (2) 3.3 数据存储 (2) 4软件安装说明 (3) 5“电子水准仪数据处理及平差软件”使用说明 (3) 5.1选择工作路径 (3) 5.2“电水数据处理”菜单 (4) 5.2.1设置转换参数 (4) 5.2.2生成高差文件 (5) 5.2.3生成平差文件 (6) 5.2.4输出观测手簿 (6) 5.3“高程平差处理”菜单 (6) 5.3.1选择平差文件 (7) 5.3.2闭合差计算 (7) 5.3.3网平差处理 (8) 5.4“结果显示”菜单 ........................................................................ 错误!未定义书签。6“电子水准仪数据处理与平差软件”文件说明 (8)
1引言 1.1编写目的 《“电子水准仪数据处理及平差软件”用户操作手册》是高速铁路沉降观测评估软件之一“电子水准仪数据处理及平差软件”的使用说明,能够指导测量技术人员正确使用“电子水准仪数据处理及平差软件”。 1.2背景 为了满足高速铁路线下沉降变形观测与评估的需要,适应铁路施工与评估单位对其数据处理的要求,中铁二院工程集团有限责任公司研制了自主版权的“电子水准仪数据处理及平差软件”。 2软件的功能和性能 2.1软件功能和适用范围 电子水准仪数据处理及平差软件,是专为我国高速铁路线下沉降观测评估而设计的电子水准仪数据处理与高程平差计算软件。 2.1.1软件的主要功能有: 1、根据需要选择工作路径; 2、根据设置生成高差文件; 3、生成平差文件; 4、输出观测手簿; 5、闭合环自动搜索与闭合差计算; 6、网平差处理与成果输出; 2.1.2软件的主要输出内容包括: 1、可输出高程控制网测段实测高差数据;
科傻平差说明文件..
科傻系统系列软件之二 (COSA_CODAPS) 现代测量控制网 测量数据处理通用软件包 Version 6.0 使用说明书 武汉大学测绘学院 武地课题组 2009年4月
目录 前言 (1) 第一章概述 (3) 1.1 系统简介 (3) 1.2 安装及运行 (4) 1.3 快速入门 (5) 第二章平差 (10) 2.1 控制网观测值文件 (10) 2.2 控制网平差 (20) 2.3 设置与选项 (23) 2.4 生成概算用文件 (32) 2.5 附加信息文件 (33) 2.6 自由网平差 (34) 第三章工具 (40) 3.1 平面闭合差计算 (40) 3.2 高程闭合差计算 (42) 3.3贯通误差影响值计算 (42) 3.4图形显绘 (44) 3.5斜距化平 (44) 3.6手簿通讯 (46) 3.7格式转换 (47)
3.8高差转换 (47) 3.9徕卡DNA格式转换 (47) 3.10拓普康GTS格式转换 (50) 3.8叠置分析 (52) 第四章粗差定值定位和方差分量估计 (54) 4.1粗差定值定位 (54) 4.2方差分量估计 (60) 第五章网的模拟计算和优化设计 (62) 5.1生成正态标准随机数 (62) 5.2网的模拟计算 (62) 5.3平面网优化设计 (70) 第六章报表输出 (72) 6.1原始数据报表 (72) 6.2 平差结果报表 (79) 第七章坐标转换 (82) 7.1 XYZ-〉BLH (82) 7.2 BLH->XYZ (83) 7.3 XY->BL (84) 7.4 BL->XY (85) 7.5 XY1->XY2 (85) 7.6 XY1->XY2 (86) 7.8 几何转换 (87) ii
四等水准测量
四等水准测量 四等水准测量 1.四等水准测量的概念 2.四等水准测量的技术要求 3?四等水准测量的方法步骤 4.四等水准测量的观测记录 5.四等水准的测量的计算 6.四等水准测量的注意事项 1.四等水准测量的概念 我们将用水准测量的方法测定的高程控制点称为水准点。 水准点记为BM(Bench Matk)。 三、四等水准测量,常作为小地区测绘大比例尺地形图和施工测量的高程基
本控制。 高程测量时测量工作三大基本内容之一。水准测量是高程测量的一种方法。 四等水准测量与普通水准测量的异同点: (1)相同点:都需要拟定水准路线、选点、埋点和观测等程序。 (2)不同点:四等水准测量必须使用双面尺观测,记录计算, 观测顺序,精度要求不同
2?四等水准测量的技术要求 四等水准路线一般沿道路布设,尽量避开土质松软地段,水准点间距 一般为2~4Km在城市建筑区为1~2Km水准点应选在地基稳固、能长久保存和便于观测的地点。 3.四等水准测量的方法步骤 (1)测量方法 四等水准测量的观测应在通视良好、望远镜成像清晰、稳定的情况下
进行。(2)观测步骤 (2)观测步骤 引入K值得概念: K为双面水准尺的红面分划与黑面分划的零点差(常数 4.687m 或4.787m),对于四等水准测量,读数差不能超过3mm 四等水准测量中,水准尺必须成对出现。 或里一红一里一红 八、、
①在测站上安置仪器,使圆水准气泡居中,后视水准尺黑面,用上、 下丝读数,记入记录表中(1)和(2);用中丝读数,记入表中 (3)。 ②翻转水准尺,后视水准尺红面,用中丝读数,记入表中(4)。 ③前视水准尺黑面,用上、下丝读数,记入表中(5)和(6),前视 水准尺黑面,用中丝读数,记入表中(7)。 ④翻转水准尺,前视水准尺红面,用中丝读数,记入表中(8)。 4.四等水准测量的观测记录 4.四等水准测量的观测记录 四等水准测量观测记录手薄
三四等水准测量步骤
四等水准测量控制测量除了要完成平面控制测量外,还要进行高程控制测量。小区域地形测图或施工测量中,多采用三、四等水准测量作为高程控制测量的首级控制。 一、三、四等水准测量(leveling) 的技术要求 1、高程系统:三、四等水准测量起算点的高程一般引自国家一、二等水准点,若测区附近没有国家水准点,也可建立独立的水准网,这样起算点的高程应采用假定高程。 2、布设形式:如果是作为测区的首级控制,一般布设成闭合环线;如果进行加密,则多采用附合水准路线或支水准路线。三、四等水准路线一般沿公路、铁路或管线等坡度较小、便于施测的路线布设。 3、点位的埋设:其点位应选在地基稳固,能长久保存标志和便于观测的地点,水准点的间距一般为1 —1. 5km 山岭重丘区可根据需要适当加密,一个测区一般至少埋设三个以上的水准点。 4、三、四等及五等水准测量的精度要求和技术要求列于表中。 二、三、四等水准测量的观测方法
三、四等水准测量观测应在通视良好、望远镜成像清晰及稳定的情况下进行。一般采用一对双面尺。 1、三等水准一个测站的观测步骤:(后-前- 前- 后;黑- 黑- 红- 红) /I—I 5 八、、八、、/ (1)照准后视尺黑面,精平,分别读取上、下、 中三丝读数,并记为(1)、(2)、(3)。 (2)照准前视尺黑面,精平,分别读取上、下、 中三丝读数,并记为(4)、(5)、(6)。 (3)照准前视尺红面,精平,读取中丝读数,记为(7) (4)照准后视尺红面,精平,读取中丝读数,记 为(8) 这四步观测,简称为“后一前一前一后(黑一黑一红一红)”,这样的观测步骤可消除或减弱仪器或尺垫下沉误差的影响。对于四等水准测量,规范允许采用“后一后一前一前(黑一红一黑一红)”的观测步骤。 2、一个测站的计算与检核: 观测记录参看书本表7-11 。