4.第四章 潮流计算中的特殊问题
第四章 潮流计算中的特殊问题
第一节 负荷的静态特性
负荷的功率是系统频率和电压的函数。在潮流计算中可以认为频率变化不大。但由于发电机或输电设备的开断会引起电压较大的变化,在潮流计算中计及负荷的静态电压特性是合理的。
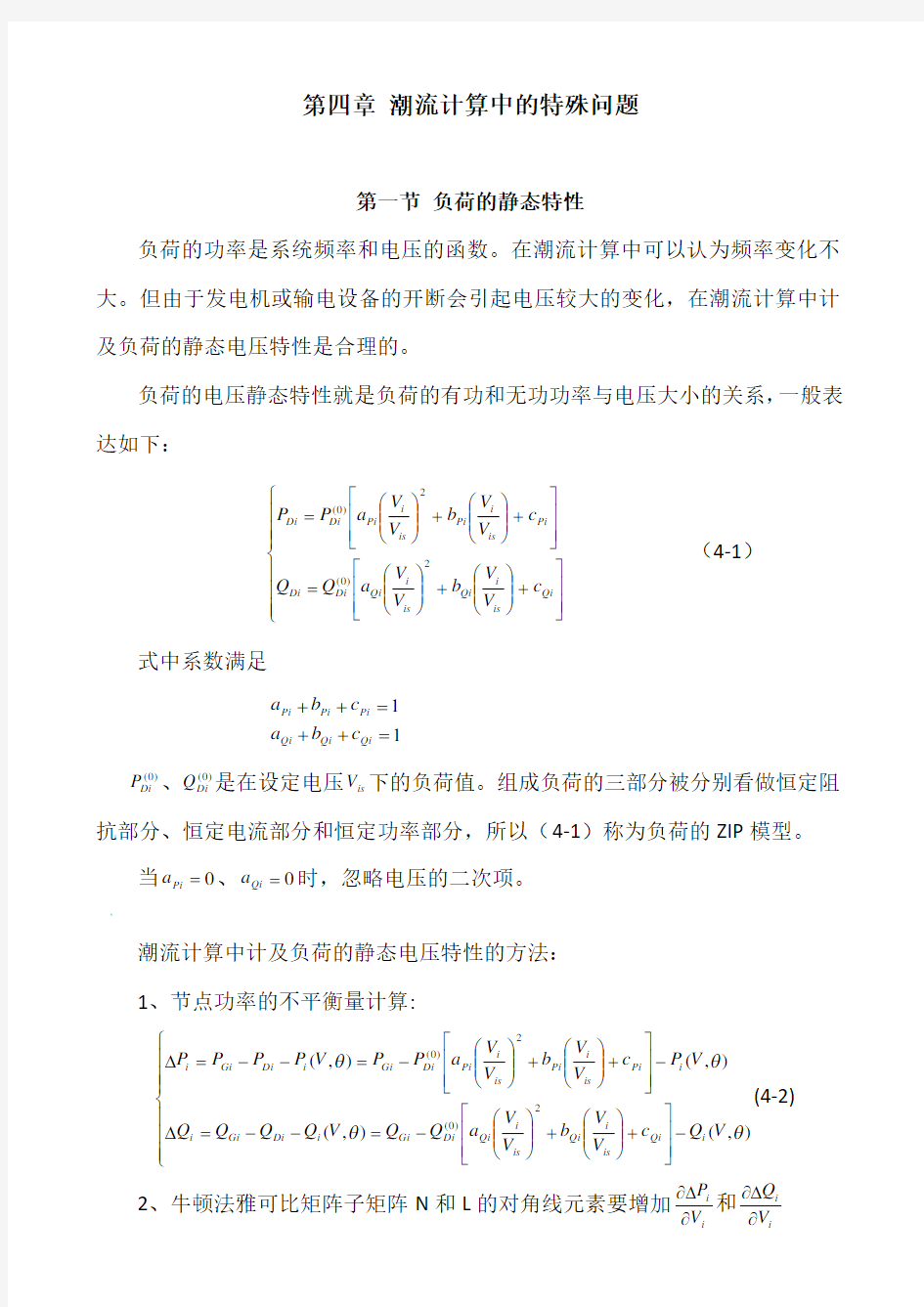
负荷的电压静态特性就是负荷的有功和无功功率与电压大小的关系,一般表达如下:
????
?????????????+???? ??+???? ??=??
?
?????+???? ??+???? ??=Qi is i Qi is i
Qi Di Di Pi is i Pi is i Pi Di Di c V V b V V a Q Q c V V b V V a P P 2
)0(2)0( (4-1) 式中系数满足
1
1=++=++Qi Qi Qi Pi Pi Pi c b a c b a
)0(Di P 、)
0(Di Q 是在设定电压is V 下的负荷值。组成负荷的三部分被分别看做恒定阻
抗部分、恒定电流部分和恒定功率部分,所以(4-1)称为负荷的ZIP 模型。
当0=Pi a 、0=Qi a 时,忽略电压的二次项。
'
潮流计算中计及负荷的静态电压特性的方法:
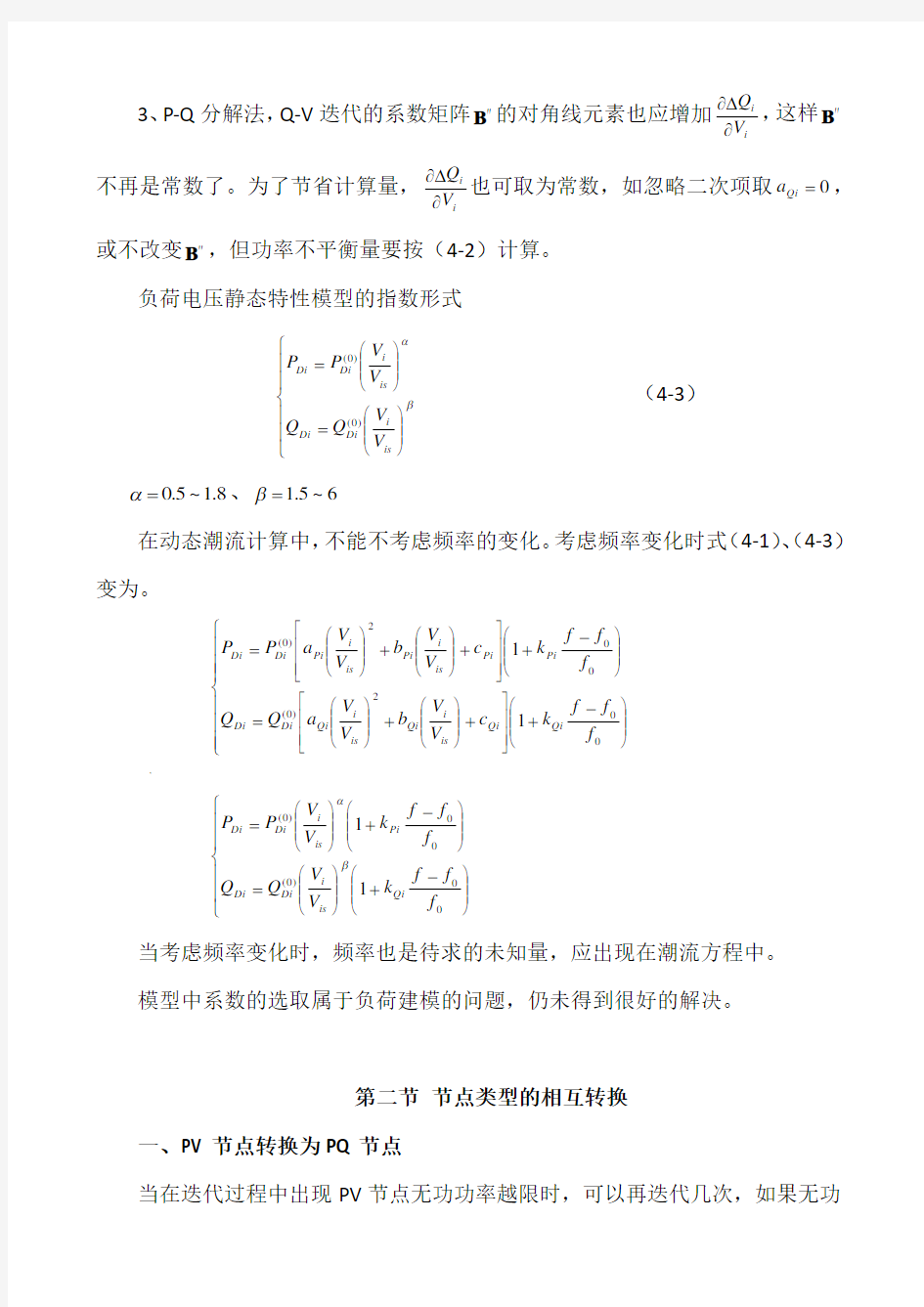
1、节点功率的不平衡量计算:
????
?????-????????+???? ??+???? ??-=--=?-???
?????+???? ??+???? ??-=--=?)
,(),()
,(),(2
)0(2)0(θθθθV Q c V V b V V a Q Q V Q Q Q Q V P c V V b V V a P P V P P P P i Qi is i Qi is i
Qi Di Gi i Di Gi i i Pi is i Pi is i
Pi Di Gi i Di Gi i (4-2) 2、牛顿法雅可比矩阵子矩阵N 和L 的对角线元素要增加
i i V P ???和i
i
V Q ???
3、P-Q 分解法,Q-V 迭代的系数矩阵B ''的对角线元素也应增加i
i
V Q ???,这样B ''不再是常数了。为了节省计算量,
i
i
V Q ???也可取为常数,如忽略二次项取0=Qi a ,或不改变B '',但功率不平衡量要按(4-2)计算。
负荷电压静态特性模型的指数形式
???
????
?
??? ??=?
??
? ??=β
α
is i Di Di is i Di
Di V V Q Q V V P P )0()0( (4-3) 8.1~5.0=α、6~5.1=β
在动态潮流计算中,不能不考虑频率的变化。考虑频率变化时式(4-1)、(4-3)变为。
????
????????? ??-+????????+???? ??+???? ??=???? ??-+???
?????+???? ??+???? ??=002
)0(002)0(11f f f k c V V b V V a Q Q f f f k c V V b V V a P P Qi Qi is i Qi is i
Qi Di Di Pi Pi is i Pi is i
Pi Di Di ,
???
???????? ??-+???? ??=???
? ??-+???? ??=00)0(00)0(11f f f k V V Q Q f f f k V V P P Qi is i Di Di Pi is i
Di Di β
α
当考虑频率变化时,频率也是待求的未知量,应出现在潮流方程中。 模型中系数的选取属于负荷建模的问题,仍未得到很好的解决。
第二节 节点类型的相互转换
一、PV 节点转换为PQ 节点
当在迭代过程中出现PV 节点无功功率越限时,可以再迭代几次,如果无功
仍越限,说明PV 节点电压设置不合理,应进行调整:
如果无功功率越下限,检查是否电压设置过低如是可适当提高电压设定值,或转换为PQ 节点,无功定值置下限值。
如果无功功率越上限,说明节点无功功率不能支持设定的电压,可适当调低电压设定值,或转换为PQ 节点,无功定值取上限值。
PV 节点转换为PQ 节点的处理方法: —
1、直角坐标方式的节点不平衡量由2i V ?变为i Q ?;
2、牛顿法极坐标方式的修正方程加1个Q ?方程;
3、P-Q 分解法,θ-P 迭代不变,V Q -迭代的系数矩阵有两种处理方法: (1)B ''增加一行一列,如增加到最后:
??
?
???''=''ii T
i
B B B B B i ~ (4-4) 新的矩阵的因子表可由右下角加边的因子表修正法求出。 (2)B ''的对角元加大数
在形成B ''时包含PV 节点对应的导纳,但PV 节点的对角元加一个很大的数。这样在正常Q-V 迭代时,PV 节点的电压修正零接近于0,不会影响其他节点的电压修正量。当PV 转换为PQ 节点时,将加的大数去掉。
ΔB B B -''=''~
(4-5) 采用因子表秩1修正法得到新的因子表
?
二、PQ 节点转换为PV 节点
当在迭代过程中出现PQ 节点电压越限时,可以再迭代几次,如果电压仍越限,说明PQ 节点无功设置不合理,应进行调整:
如果电压越下限,说明无功设置较低,可适当提高无功设定值,或转换为
PV 节点,电压定值取下限值。
如果电压越上限,说明节点无功设定偏高,可适当调低无功设定值,或转换为PV 节点,电压定值取上限值。
PQ 节点转换为PV 节点的处理方法:
1、直角坐标方式的节点不平衡量由i Q ?变为2i V ?;
2、牛顿法极坐标方式的修正方程减1个Q ?方程;
3、P-Q 分解法,θ-P 迭代不变,V Q -迭代的系数矩阵有两种处理方法: (1)在B ''中划去将要转换为PV 节点的节点所在的行和列,重新形成因子表。
(2)在B ''中将要转换为PV 节点的节点对应的对角元加一个很大的数,用因子表秩1修正法得到新的因子表
,
三、因子表修正方法
1、因子表秩1修正法
设系数矩阵A 已因子化为如下的形式
LDU A = (4-6)
由于某种原因,A 变化为:
A A N M A A ?+=+=T a ~
(4-7) 其中M 和N 为1?n 的列矢量,a 为标量。新矩阵A ~
的因子表为: U D L A ~
~~~= (4-8) 将(4-8)、(4-6)代入(4-7)有:
T M aN LDU U D L +=~
~~ (4-9)
&
为了求出U D L ~
~~中的各元素,将U D L ~
~~和LDU 各矩阵的第一行和第一列单独列
出,并写成分块矩阵的形式:
????
??=11L l L 1
??????=1D D 1d ???
??
?=1U u U 11 (4-10) 和
??????=11
L l L ~~
1
~ ?????
?=1D D ~~
~1d ??
?
???=1U u U ~~1~1 (4-11) 及
??????=11M M m ???
???=11N N n (4-12)
将(4-10)代入(4-6),A 矩阵可写为:
?
?
?
???+=111111111
11U D L u l l u A d d d d
(4-13) 将(4-11)代入(4-8),A ~
矩阵可写为:
??
????+=1111111
11
11
~~~~~~~
~~
~~
~U D L u l l u A d d d d (4-14) #
将(4-12)代入T
MaN A =?
??
??
??=?T T a an a m an m 11111
11
1N M M N A (4-15) 将(4-13)、(4-14)、(4-15)代入(4-7)有
??
??
??+??????+=??????+T T
a an a m an m d d d d d d d d 111
11
11
11111111
11111111111
11
11
~~~~~~~
~~
~~
N M M N U D L u l l u U D L u l l u (4-16) 根据等号两端矩阵对应元素相等,可得:
(1) 1111~
an m d d += (4-17)
(2) T a m d d 111111~~
N u u +=将(4-17)变为1
111~
an m d d -=代入,有 T a m d 111111~~~N u u -+= (4-18)
其中
1111~
u N N n T
T -= (4-19)
*
(3) 111111~~an d d M l l +=将(4-17)变为1111~
an m d d -=代入,有
111111~
~
~
-+=d an M l l (4-20) 其中
1111~
m l M M -= (4-21) 由上(1)、(2)、(3)可计算出新矩阵因子表上三角矩阵第一行元素、下三角矩阵第一列元素和对角线矩阵第一个元素。
(4) T a d d 1
1111111111111~
~~~~
~N M U D L u l U D L u l ++=+ 重写为
111111111111111111~~~~~~A U D L N M U D L u l u l U D L ?+=++-=T
a d d (4-22)
其中T a d d 1
11111111~~
~N M u l u l A +-=?将(4-18)、(4-20)代入得 T T
T T
T T
T T
T T T
T T T
T T
T T T T T T
T T
a a m d an a a m d an n a m a m d an an m a m a m d an a an a m an m a m d an a an m an an m a m an m a m d an a an m n a m an m a a m d an an a m an m a a m d d d an d d an a m d d d an m d a a m d d d an an m d a d d 1
1
1
111111
111111111111
111111*********
111111111111111111
11111111111111111111111111
1111111111111111111111
111111111111111111
1111111111111111111111111111111
111111111111111111
11111111~~~~)~(~~~~)()(~~~)()(~~~~~~~~~)()(~~~~~~~~~~~~~~~~~~)~~(~)~~()~(~~~N
M N M N M u N l M N M u l M N l M N M N M u M N l u l N M N M u l u M u l N l u l N M N M u l M u N l u l N M N M u M N l u l N M N M u M N l u l u l u l N M N u M l u l N M u l u l A =-=---=----=-+--=-++-+--=-+-----=+----=+-----=+++--=+-=?-------------
(4-23)
>
其中
)~(~1111a m d an a a --= (4-24)
因此,(4-22)可写为如下的形式
T a 1
1111111~
~~
~
~~N M U D L U D L += (4-25) (4-25)与(4-9)有同样的形式,可用(1)、(2)、(3)的方法分别求出1
11~
~~U D L
矩阵的第一行第一列元素。
因子表的秩1修正过程就是递归使用式(4-17)、(4-18)和(4-20)逐次求出新矩阵的因子表的过程。程序流程为:
n
n n n i i T i i i i i T
i i i i i i i i i i i i i i i an m d d end loop
a
m d a-an a a m d n d an m l an
m d d ,...,n-,loop i i
i i +=????
????
???????=+=-=+=-=+==---111121N u u u N N M l l M M (4-26) 由于M 和N 是非零元素非常少的稀疏矢量,使用稀疏矢量的排零运算后,上述程序流程的计算量很小。
2、原矩阵右下角加边的因子表修正法 已知原矩阵A 的因子表
LDU A = (4-27)
}
在原矩阵A 右下角增加m 行m 列后形成的加边矩阵A ~
及因子表表示为:
??
?
????????
???????=???
???=a M a N u u U d D
l l L
a N M A A ~
(4-28) 其中M 是m n ?阶矩阵,N 是n m ?阶矩阵。由因子分解方法可知,原矩阵因子表的元素不变化。右边展开
??
?
???+=??????ααdu l Du l DU l LDu LDU a N M A M N N M
(4-29) 对照、比较得
M L D u 1
1--=M (4-30) 1
1--=D NU l N
(4-31)
M N Du l a du l -=αα (4-32)
对矩阵M N Du l a -进行三角分解可求出a l 、d 和a u 矩阵各元素。当1=m 时,
1=a l 、1=a u ,(4-32)变为
M N Du l a d -= (4-33)
…
其结果为一标量。
回忆因子表法线性方程组的求解过程的前代、规格化运算 b LDUx =
b L y b Ly 1-=?=(前代)
b L D y D z y Dz 111---==?=(规格化)
可见(4-30)就是用L 和D 对M 中的各列进行的前代、规格化运算。将(4-31)
两边取转置T
T T T T N N U D D NU l 1111)()()(----==,所以(4-31)就是用U 和D 对N 中
的各行进行的前代、规格化运算。不别进行矩阵的求逆运算。
第三节 多θV 节点的潮流计算
有时我们只关心一个大电网中的一部分网络的运行状态,为了简化计算将电网分解为内部网、边界和外部网三部分。将外部网的所有节点用高斯消去法消掉,用边界节点间的等值支路来等值替代。如图所示。
要对等值后的网络进行计算,需要知道边界节点处来自外部等值网络的注入
功率。内部网和边界节点的运行参数可由SCADA系统得到,进而用状态估计方法可求出边界节点处的电压后,这样等值网络就是一个具有多θV节点的网络。
设系统节点数为N,其中有S个节点θV给定,R个节点PV给定,其余N-S-R 个节点为PQ给定。这样可写出N-S个有功约束方程和N-S-R个无功约束方程,待求的为N-S-R个节点的电压相角θ和N-S个节点的电压幅值V。待求变量数量与方程数相等,方程可解。牛顿法或P-Q分解法均可使用。
上述多θV的潮流方程收敛后,可求出边界节点处由外部网注入的等值功率。将此注入功率作为已知量,可进一步研究内部网在各种运行方式下的潮流分布。即认为在以后的分析中外部网提供的注入功率不变。
第四节潮流方程解的存在性、多值性以及病态潮流解法
一、潮流方程解的存在性、多值性
(
(1)、潮流方程是一组非线性方程组,理论上是多解的。如不同的给定值、不同的初始条件得到的解可能不同;
(2)、潮流计算得到的解可能是有实际意义的,即与实际运行状态相符或实际能运行的解;也可能是无实际意义的,如实际无法实现或无法接受的解;
(3)、潮流方程无解,或无实数解,不能收敛;
(4)、潮流方程有解,但算法不完善,不能收敛,如修正方程病态;
(5)、采用“平值启动”或状态估计的参数作为初始条件得到的解一般是有意义的。
(6)、潮流方程解的存在性、多值性是仍未解决的困难课题。
二、病态潮流及其解法
主要是指修正方程的病态。
1、病态方程
一个线性方程组 AX b =,若右端向量b 或系数矩阵A 的微小变化就会引起方程组的解发生很大的变化,则称AX b =为病态方程组。方程组的系数矩阵A 的条件数()1Cond A A A -=刻画了方程组的性态,若()1Cond A ≥,则称AX b =为“病态”方程组;若()Cond A 相对较小,则称AX b =为“良态”方程组。良态方程组用GAUSS 消去法和JACOBI 等简单的迭代法就可以得到比较好的计算解,而对于病态方程组,一般的直接法和迭代法会有较大的误差,甚至严重失真。所以,在解方程组时,有必要先对方程组的性态进行研究,采用相应的算法,才能得到比较精确的计算解。利用方程组的条件数来判断就是一个很好的办法。
}
下面的一些直观的现象可作为判别病态矩阵的参考:
(1)在主元消去法的过程中出现小主元,则A 有可能是病态矩阵,但病态矩阵未必一定有这种小主元;
(2)若解方程组时出现很大的解,则A 有可能是病态矩阵,但病态矩阵也可能有一个小解;
(3)从矩阵本身来看,若元素间数量级相差很大且无一定规律;或矩阵的某些行(列)近似线性相关,即矩阵的行列式接近于0,这样的矩阵就有可能是
病态的。
当然,这些现象只能帮助我们做初步的判断,并且很多病态矩阵也不一定会出现这些现象。最可靠的判别方法是求出矩阵的条件数。
2、病态潮流方程的求解 (1)最优乘子法
潮流方程解不收敛可能是由于修真方程病态使修正量偏大,造成解的振荡,为此在第k 次修正时采用如下的公式。
(k)(k))(k μΔx x x -=+1 (4-34)
μ是标量乘子,应满足
'
2
)()()(m in k k f x x ?-μμ (4-35)
上式表明μ的值应使第k 次修正后潮流方程0f(x)=的适配量的平方和为最小值。所以叫最优乘子法。式(4-35)是最小二乘目标函数,展开为
∑=?-=?-n
i k k i
k k f f 1
2)()
(2
)
()
())((min
)
(min x x
x
x
μμμ
μ
(4-36)
(4-35)取最小值的条件是 0)
(2
)()(=?-du
f d k k x x μ
(4-37)
为了能求出满足(4-37)的μ,做如下处理: (1)将)()()(k k f x x ?-μ用泰勒展开的前两项表示
)()()()()()()()(k k k k k f f x x f x x x ?'-=?-μμ (4-38)
(2)(4-36)中最小二乘函数变为
∑∑∑===?+?-=?-=?-n i k k i k k i k i k i n
i k k i k i n
i k k i
f f f x
x
f 1
2)()('2)()(')()(21
2
)()(')(1
2
)
()
()
))(()()(2)(())()(())((x x f x x f x x x x f x μμμμ (4-39)
@
(3)对(4-39)式求对μ的导数
∑∑∑===?+?-=?+?-=?-n
i k k i n
i k k i
k i n
i k k i k k i k i k k f f du
f d 1
2
)()('1
)
()
('
)
(12)()(')()(')(2
)()())((2))()((2)
))((2)()(2()
(x x f x x f x x x f x x f x x x μμμ(4-40)
(4)令(4-40)等于0,得
∑∑==??=
n i k k i n
i k k i k i
f 1
2
)()('1
)()(')
())(()
)()((x x f x x f x
μ
(4-41)
如潮流有解,目标函数会逐渐减小为零;如果无解,目标函数会逐渐减小到一个定值上,μ越来越小,最后为零,此时得到的解为潮流方程的最小二乘解。
(2)、非线性规划法
解潮流方程是寻求满足0f(x)=的x 的值。如果x 满足
0)(21)()(21)(1
2
===∑=m i i T f F x x f x f x ,则x 是0f(x)=的解。潮流方程的求解转化为非线
性规划问题。
)()(2
1)(min x f x f x T
x
F =
(4-42) 如果上述非线性规划问题的解使目标函数为0,则非线性规划问题的解就是潮流方程的解,潮流方程有解;如果上述非线性规划问题的解使目标函数非0,表明潮流方程无解,非线性规划问题的解是潮流方程的最小二乘解。
式(4-42)非线性规划目标函数取极小值的条件是
?
),...,2,1( 0)
(n i x F i
==??x (4-43)
即
),...,2,1( 0)()())(21()
(112
n i x f f x f x F m
j i
j j i m j j i ==??=??=??∑∑==x x x x (4-44)
上式为n 个方程组成的非线性方程组。n 为潮流方程变量数,m 为潮流方程数。可见这种方法不要求潮流方程数与变量数相等。
方程组(4-44)求解计算量太大,实用的是最优乘子法。
第五节 潮流方程中的二次型
一、二次型函数的泰勒展开
考虑只包含二次项的代数函数为如下形式
22),(Zy Bxy Ax y x f ++= (4-45) 、
该函数三阶以上的导数为零,其各一、二导数为
Z f B f A f B f Bx
Zy f By Ax f yy
yx xx
xy
y x 2222=''=''=''=''+='+='
(4-46)
该函数在0x ,0y 处泰勒展开为
)
,(),(),(),()
222(2
1
),(),(),()),(),(2),((21
),(),(),(),(000000220000002000020000000000y x f y y x f x y x f y x f y Z y x B x A y y x f x y x f y x f y y x f y x y x f x y x f y
y x f x y x f y x f y y x x f y x y x yy xy xx
y x ??+?'+?'+=?+??+?+?'+?'+=?''+??''+?''+?'+?'+=?++?+(4-47)
即二次型函数的泰勒展开二次项部分与原函数有同样的形式,只是变量换成了变量的增量。由于三阶以上的导数为零,所以(4-47)是函数的精确表达。
二、潮流方程中的二次型及求解
直角坐标形式的潮流方程为仅包含二次项的非线性代数方程组
11 )(121
0)()(121 0)()(222??
??
???-+--=+===+--=-==++-=∑∑∑∑∈∈∈∈),...,n r r,n n (i f e V ),...,n-r-,(i e B f G e f B e G f Q ),...,n ,(i e B f G f f B e G e P i i is
i j j ij j ij i i j j ij j ij i is i j j ij j ij i i j j ij j ij i is (4-48)
)(x y y =sp (4-49)
>
其中sp y 为12?n 列矢量,是已知量;)(x y 为12?n 潮流方程的函数矢量;x 为待求变量,是12?n 维矢量。
按照二次型函数的特点,将(4-49)在解的初值0x 处展开式为
)()(0x y x J x y y ?+?+=sp (4-50) J 是)(x y 在0x 的雅可比矩阵。
(4-50)是(4-49)的精确表达,没任何近似。对于潮流方程取平启动电压为初值,由(4-50)解出x ?并用x x x ?+=0修正可得原方程的解。但(4-50)也是一个非线性方程组,其形式较原方程一致,所以不是一个可取的解法。
由(4-50)可以得到一个迭代式
))()(()(01)1(k sp k x y x y y J x ?--=?-+ (4-51) 上式中J 可保持平启动电压时的值不变,所以是一种定雅可比的算法。x ?的初值可取0。式(4-51)为高斯迭代法,可以使用高斯-赛德尔迭代法改善收敛性。特点是避免了牛顿法每次迭代需要重新计算雅可比矩阵的问题。
(4-51)能得到可靠稳定解的条件是J 非病态,如果J 病态可采用最优乘子法。将(4-51)修改为
))()(()(01)1(k sp k x y x y y J x ?--=?-+μ (4-52)
μ值的选取是使(4-50)两端的偏差量的平方和为最小,先写出偏差量的表
达式
2
2
00)()()
()()(μμμμμμμc b a x y x J x y y x y x J x y y x ++=?+?--=?+?--=?sp sp f (4-53)
??
?
???-=?-=-=)()(0x y c x J b x y y a sp (4-54)
目标函数
)()(2
1)(min 22μμμμμμc b a c b a ++++=T F
对目标函数取μ的的一阶导数,并令其为零,得
0332210=+++μμμg g g g (4-55) 其中
???????==+==c c c b c
a b b b a T T
T T T g g g g 2324
210 (4-56) 解(4-55)一元三次方程得最优乘子μ。