最新汽车2自由度和7自由度动力学建模仿真

1 路面模型的建立
在分析主动悬架控制过程时,路面输入是一个不可忽略的重要因素,本文利用白噪声信号为路面输入激励,
)(
2
)(
2
)(
t
w
U
G
t
x
f
t
x
g
g
π
π+
-
=
?
其中,
f为下截止频率,Hz;G0为路面不平度系数,m3/cycle;U0为前进车速,m/sec;w为均值为零的随机输入单位白噪声。上式表明,路面位移可以表示为一随机滤波白噪声信号。这种表示方式来源于试验所测得的路面不平度功率谱密度(PSD)曲线的形状。我们可以将路面输入以状态方程的形式加到模型中:
??
?
?
?
=
+
=
?
X
C
Y
W
F
X
A
X
road
road
road
road
road
1
,
2
,
2
,
=
=
-
=
=
road
road
road
g
road
C
U
G
B
f
A
x
Xπ
π;D=0;考虑路面为普通路面,
路面不平系数G
=5e-6m3/cycle;车速U
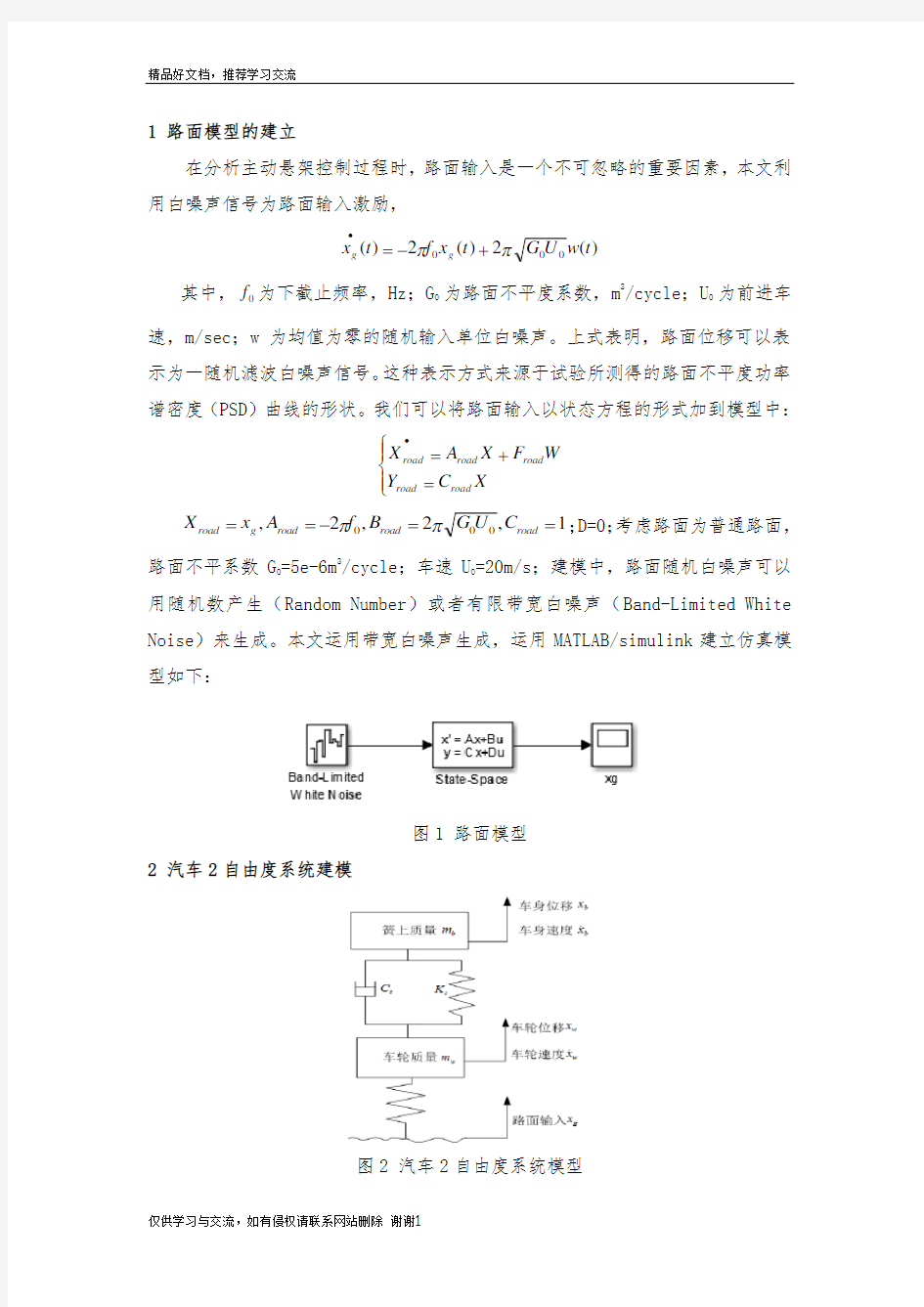
=20m/s;建模中,路面随机白噪声可以用随机数产生(Random Number)或者有限带宽白噪声(Band-Limited White Noise)来生成。本文运用带宽白噪声生成,运用MATLAB/simulink建立仿真模型如下:
图1 路面模型
2 汽车2自由度系统建模
图2 汽车2自由度系统模型
根据图2所示,汽车2自由度系统模型,首先建立运动微分方程:
()()()()()b b s b w s b w w w t w g s b w s b w m x K x x C x x m x K x x K x x C x x =----???=--+-+-??
整理得:
??????
?+--+-+-+-=-+-+-+-=g
w t b w t s b w s b w s b w s w b b s b b s w b s b s b
x m K x m K K x m K x m C x m C x x m K x m K x m C xb m C x
式中:s C 为悬架阻尼,s K 为悬架刚度,t K 为轮胎刚度,b m 为车身质量,w m 为
车轮质量,b b b x x
x 、、分别为车身位移、速度、加速度,w w w x x x 、、分别为车轮位移、速度、加速度,g x 为路面输入。 选取状态变量和输入向量为:
[]w b
w b x x x
x
X = g x U =
则可将系统运动方程及路面激励写成状态空间矩阵形式,即:
BU AX X +=
其中,A 为状态矩阵,B 为输入矩阵,其值如下:
??????
??
?
?????????----
-=00
1
0001w
s s w s w s w s
b
s b s b s
b
s
m K K m K m C m C m K m K m C m
C A ????
??????????=000w t m K B
将车身加速度、轮胎动变形、悬架动行程作为性能指标,即:
T w b g
w b x x x x x Y ][--=
将性能指标项写为状态变量以及输入信号的线性组合形式,即:
DU CX Y +=
其中:
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
?
-
-
-
=
1
1
1
b
b
b
b
m
Ks
m
Ks
m
Cs
m
Cs
C
?
?
?
?
?
?
?
?
?
?
-
=
1
D
运用MATLAB/simulink建立仿真模型如下:
图3 汽车2自由度simulink模型
3 汽车7自由度系统建模
图4 汽车7自由度系统模型
根据图2所示,汽车2自由度系统模型,首先建立运动微分方程:
在俯仰角
b
θ和侧倾角φ较小时,车身四个端点处的垂向位移有如下关系:
φθf b b bA B a z z 21
+-= (1)
φθf b b bB B a z z 21
--= (2)
φθr b b bC B b z z 21
++= (3)
φθr b b bD B b z z 2
1
-+= (4)
因此,车身质心处的垂向运动方程为:
)()()()()()()()(bD wD sD bD wD sD bC wC sC bC wC sC bB wB sB bB wB sB bA wA sA bA wA sA b b z z k z z C z z k z z C z z k z z C z z k z z C z
m -+-+-+-+-+-+-+-= (5)
车身俯仰运动方程为:
)]()()()([)]()()()([bB wB sB bB wB sB bA wA sA bA wA sA bD wD sD bD wD sD bC wC sC bC wC sC b p z z k z z C z z k z z
C a z z k z z C z z k z
z C b I -+-+-+---+-+-+-= θ (6)
车身侧倾运动方程为:
2
)()()()([2
)()()()([r
bD wD sD bD wD sD bC wC sC bC wC sC f bB
wB sB bB wB sB bA wA sA bA wA sA r B
z z k z z C z z k z z
C B z z k z z C z z k z z C I -----+-+-----+-= φ (7)
四个非簧载质量的垂向运动方程分别为:
)()()(wA bA sA wA bA sA wA gA tA wA wA z z C z z k z z k z m -+-+-= (8) )()()(wB bB sB wB bB sB wB gB tB wB wB z z C z z k z z k z m -+-+-= (9)
)()()(wC bC sC wC bC sC wC gC tC wC wC z z C z z k z z k z m -+-+-= (10) )()()(wD bD sD wD bD sD wD gD tD wD wD z z C z z k z z k z m -+-+-= (11)
以上(5)~(11)七个微分方程代表了七自由度整车动力学模型。取b z 、b θ、
φ、wA z 、wB z 、wC z 和wD z 为状态变量建立形如g t Z K KX X C X M =++ 的微分矩阵方程,得:
)(2
1
)()()(2
1)()(=-----+-+++--+++++-----+-+++--+++++wD sD wC sC wB sB wA sA sD r sC r sB f sA f b sD sC sB sA b sD sC sB sA wD sD wC sC wB sB wA sA sD
r sC r sB f sA f b sD sC sB sA b sD sC sB sA b b z K z K z K z K K B K B K B K B bK bK aK aK z K K K K z C z C z C z
C C B C B C B C B bC bC aC aC z C C C C z
m φ
θφθ (12)
0)(2
1
)()()(2
1)()(22222222=--++-++-+++++++--+--++-++-+++++++--+wD sD wC sC wB sB wA sA sD r sC r sB f sA f b
sD sC sB sA b sD sC sB sA wD sD wC sC wB sB wA sA sD r sC r sB f sA f b
sD sC sB sA b sD sC sB sA b
p z bK z bK z aK z aK K bB K bB K aB K aB K b K b K a K a z bK bK aK aK z bC z bC z aC z aC C bB C bB C aB C aB C b C b C a C a z bC bC aC aC I φθφθθ (13)
02222)(41)(2
1
)(212222)(41)(2
1)(212
2222222=+-+-++++-++-+-+-++-+-++++-++-+-+-+wD sD r wC sC r wB sB f wA sA f sD r sC r sB f sA f b sD r sC r sB f sA f b sD r sC r sB f sA f wD
sD r wC sC r wB sB f wA sA f sD r sC r sB f sA f b sD r sC r sB f sA f b sD r sC r sB f sA f r z K B z K B z K B z K B K B K B K B K B K bB K bB K aB K aB z K B K B K B K B z C B z C B z C B z C B C B C B C B C B C bB C bB C aB C aB z C B C B C B C B I φθφθφ
(14) gA tA wA tA sA sA f b sA b sA wA sA sA f b
sA b sA wA wA z K z K K K
B aK z K z
C C B aC z C z m =++-+-+-+-)(2
2φθφθ (15)
gB tB wB tB sB sB f b sB b sB wB sB sB f b
sB b sB wB wB z K z K K K
B aK z K z
C C B aC z C z m =++++-+++-)(2
2φθφθ (16)
gC tC wC tC sC sC r b sC b sC wC sC sC r b
sC b sC wC wC z K z K K K B bK z K z C C B bC z C z m =++---+---)(2
2φθφθ (17)
gD tD wD tD sD sD r b sD b sD wD sD sD r b
sD b sD wD wD z K z K K K B bK z K z C C B bC z C z m =+++--++--)(2
2φθφθ (18) 取微分方程(12)~(18)的各项系数,得到质量矩阵M 、阻尼矩阵C 、刚度矩阵K 和输入矩阵t K :
??????
????
???????????
?=wD wC wB wA r p b
m m m m I I m M 0
0000000000000000000
000000000000000000 ??????????
???????????
?=tD tC tB tA
t K K K K K 0
0000000000000000000000
?
?
??
??
?
??
??
??
????
?----+++---++------+-??
??
?
????
??
?
-------++--+-+++++--++--+++=sD sD r sC sC r sB sB f sA sA
f sD r sC r sB f sA f sD r sC r sB f sA f sD sC sB sA sD r sC r sB f sA f sD sC sB sA sD r sC r sB f sA f sD sD sC sC sB sB sA
sA sD
r sC r sB f sA f sD r sC r sB f sA f sD sC sB sA sD sC sB sA sD sC sB sA sD sC sB sA C C B C C B C C B C C B C B C B C B C B C B C B C B C B bC bC aC aC C bB C bB C aB C aB C C C C C B C B C B C B bC C bC C aC C aC C C bB C bB C aB C aB C B C B C B C B C b C b C a C a bC bC aC aC bC bC aC aC C C C C C 00020002000200022222)(41)(21
)(2
1)
(21)(212
2222
222 ?
?
????
?
??????
????
?++-++---+++---++------+-??
??
?
????
??
?
-------++--+-+++++--++--+++=tD sD sD r tC sC sC
r tB sB sB f tA sA sA
f sD r sC r sB f sA f sD r sC r sB f sA f sD sC sB sA sD r sC r sB f sA f sD sC sB sA sD r sC r sB f sA f sD sD sC sC sB sB sA
sA sD
r sC r sB f sA f sD r sC r sB f sA f sD sC sB sA sD sC sB sA sD sC sB sA sD sC sB sA K K K B K K K B K K K B K K K B K B K B K B K B K B K B K B K B bK bK aK aK K bB K bB K aB K aB K K K K K B K B K B K B bK K bK K aK K aK K K bB K bB K aB K aB K B K B K B K B K b K b K a K a bK bK aK aK bK bK aK aK K K K K K 00020
00200020
0022
222)(41)(21
)(2
1)
(21)(2122222
222
微分方程中,下标A 、B 、C 、D 分别表示左前、右前、左后、右后车轮,b z 为车身质心处的垂向位移,w z 为车轮的垂向位移,b θ为车辆的俯仰角,φ为车辆的
侧倾角,g z 为路面输入垂向位移。另外,b m 为车辆簧载质量,w m 为车辆非簧载质量,a 为车身质心至前轴距离,b 为车身质心至后轴距离,f B 为前轴轮距,r B 为后轴轮距,s K 为悬架弹簧刚度,t K 为轮胎刚度,s C 为悬架阻尼系数,p I 为俯仰转动惯量,r I 为侧倾转动惯量。
运用MATLAB/simulink 建立仿真模型如下:
GE 以其四大战略:全球化战略,服务战略,六个西格玛战略和电子商务战略来寻求高速增长。但问题在于,GE 在全球100多个国家有几十种业务,34万员工,如何让如此庞大的公司按照统一的战略去获得高速增长?即是,如何保障战略的执行与实施?