光学鼠标和激光鼠标工作原理及区别
光学鼠标和激光鼠标工作原理及区别
前言:
1963年,全世界第一个鼠标原型诞生于美国加州斯坦福大学研究所,它的原型由Douglas Englebart博士创造,并由他的首席工程师Bill English发展成为世界上第一款鼠标。Englebart 博士设计鼠标的初衷就是为了让它来代替键盘烦琐的指令,使计算机的操作变得更为方便和快捷,为未来电脑的普及铺下了第一块基石。
1971年,(施乐公司)帕洛阿尔托研究中心与斯坦福大学研究所签署了一份使用协议,允许施乐公司使用该项鼠标技术,自此,鼠标技术开始逐步发展起来,他们在1972年推出世界上首款的机械滚轮鼠标名为“Alto Mouse”,现今的机械滚轮技术,很大程度上来自于施乐公司帕洛阿尔托研究中心的贡献。
随着技术的发展与市场的需求,帕洛阿尔托研究中心在1985年推出了首款光学鼠标,不过这款光学鼠标需要在特殊的有栅格的鼠标垫上才能正常使用,因此它只能说是光学鼠标的
雏形。
终于在1999年,安捷伦公司推出了一款具有革命性意义的光学定位传感器,它通过鼠标在移动过程中对接触界面的不断“拍照”,对比前后图像,得出鼠标的具体位移和速度。最重要的一点就是,它可以在绝大多数的物体表面上运作,成为真正意义上的光学鼠标。
鼠标,作为GUI电脑操作系统中最简单,最常见的电脑基本输入设备,经过了四十多年的发展与积累,走过了机械时代、传统光学时代,发展到目前的激光时代。现在就让我们一起来着重的回顾光学鼠标的相关技术原理吧。
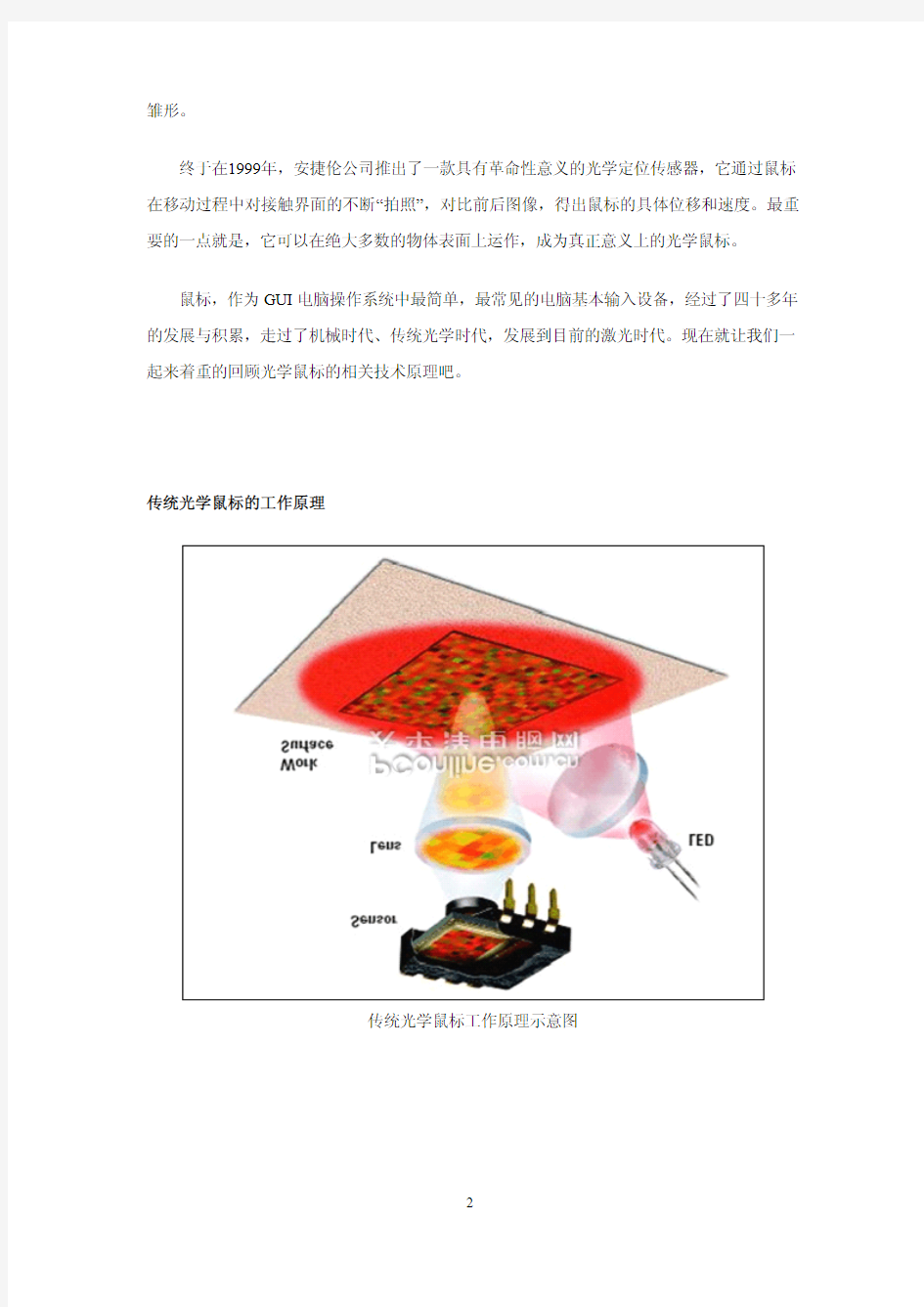
传统光学鼠标的工作原理
传统光学鼠标工作原理示意图
光学跟踪引擎部分横界面示意图
光学鼠标主要由四部分的核心组件构成,分别是发光二极管、透镜组件、光学引擎(Optical Engine)以及控制芯片组成。
光学鼠标通过底部的LED灯,灯光以30度角射向桌面,照射出粗糙的表面所产生的阴影,然后再通过平面的折射透过另外一块透镜反馈到传感器上。
当鼠标移动的时候,成像传感器录得连续的图案,然后通过“数字信号处理器”(DSP)对每张图片的前后对比分析处理,以判断鼠标移动的方向以及位移,从而得出鼠标x,y方向的移动数值。再通过SPI传给鼠标的微型控制单元(Micro Controller Unit)。鼠标的处理器对这些数值处理之后,传给电脑主机。传统的光电鼠标采样频率约为3000Frames/sec(帧/秒),也就是说它在一秒钟内只能采集和处理3000张图像。
根据上面所讲述的光学鼠标工作原理,我们可以了解到,影响鼠标性能的主要因素有哪些。
第一,成像传感器。成像的质量高低,直接影响下面的数据的进一步加工处理。
第二,DSP处理器。DSP处理器输出的x,y轴数据流,影响鼠标的移动和定位性能。
第三,SPI于MCU之间的配合。数据的传输具有一定的时间周期性(称为数据回报率),而且它们之间的周期也有所不同,SPI主要有四种工作模式,另外鼠标采用不同的MCU,与电脑之间的传输频率也会有所不同,例如125MHZ、8毫秒;500MHz,2毫秒,我们可以简单的认为MCU可以每8毫秒向电脑发送一次数据,目前已经有三家厂商(罗技、Razer、Laview)使用了2毫秒的MCU,全速USB设计,因此数据从SPI传送到MCU,以及从MCU传输到主机电脑,传输时间上的配合尤为重要。
什么是激光鼠标?
激光鼠标其实也是光电鼠标,只不过是用激光代替了普通的LED光.好处是可以通过更多的表面,因为激光是Coherent Light(相干光),几乎单一的波长,即使经过长距离的传播依然能保持其强度和波形;而LED光则是Incoherent Light(非相干光)。
激光鼠标传感器获得影像的过程是根据,激光照射在物体表面所产生的干涉条纹而形成的光斑点反射到传感器上获得的,而传统的光学鼠标是通过照射粗糙的表面所产生的阴影来
获得。因此激光能对表面的图像产生更大的反差,从而使得“CMOS成像传感器”得到的图像更容易辨别,提高鼠标的定位精准性。
什么是鼠标的全速USB技术?
全速USB技术是指USB Full Speed,相对于传统的Low Speed的每秒1.5Mb传输速度,它的传输速率为可达12Mb每秒。因为两者都以6500fps为原始数据,游戏过程中发生的大量的鼠标移动,传统鼠标所使用1.5Mb/s的Low Speed USB接口在特定的环境下有可能成为数据流的瓶颈。因此有必要将接口的全速速度提升到Full Speed,使鼠标的实际移动反映到屏幕光标时更加实时。
编辑:赵国栋
鼠标的组成及工作原理
鼠标的组成及工作原理-标准化文件发布号:(9556-EUATWK-MWUB-WUNN-INNUL-DDQTY-KII
鼠标的组成及工作原理 1,分类 鼠标按接口类型可分为串行鼠标、PS/2鼠标、总线鼠标、USB鼠标(多为多为光电鼠标)四种 鼠标按其工作原理及其内部结构的不同可以分为机械式,光机式和光电式 2,组成 光电鼠标通常由以下部分组成:光学感应器、光学透镜、发光二极管、接口微处理器、轻触式按键、滚轮、连线、PS/2或USB接口、外壳等。 3,工作原理
管脚排列 管脚说明
这里主要介绍光电鼠标 光电鼠标器是通过红外线或激光检测鼠标器的位移,将位移信号转换为电脉冲信号,再通过程序的处理和转换来控制屏幕上的光标箭头的移动的一种硬件设备。光电鼠标的光电传感器取代了传统的滚球。这类传感器需要与特制的、带有条纹或点状图案的电垫板配合使用 光电鼠标器是通过检测鼠标器的位移,将位移信号转换为电脉冲信号,再通过程序的处理和转换来控制屏幕上的光标箭头的移动。光电鼠标用光电传感器代替了滚球。这类传感器需要特制的、带有条纹或点状图案的垫板配合使用。与光机鼠标发展的同一时代,出现一种完全没有机械结构的数字化光电鼠标。设计这种光电鼠标的初衷是将鼠标的精度提高到一个全新的水平,使之可充分满足专业应用的需求。这种光电鼠标没有传统的滚球、转轴等设计,其主要部件为两个发光二极管、感光芯片、控制芯片和一个带有网格的反射板(相当于专用的鼠标垫)。工作时光电鼠标必须在反射板上移动,X发光二极管和Y发光二极管会分别发射出光线照射在反射板上,接着光线会被反射板反射回去,经过镜头组件传递后照射在感光芯片上。感光芯片将光信号转变为对应的数字信号后将之送到定位芯片中专门处理,进而产生X-Y坐标偏移数据。
鼠标结构及原理
鼠标的定位原理 光电鼠标就是通过红外线或者激光检测鼠标的位移,将位移信号转换为电脉冲信号,通过程序的处理控制屏幕中光标箭头的移动。 一.鼠标的结构 光学鼠标主要由四部分的核心组件构成,分别就是发光二极管、透镜组件、光学引擎以及控制芯片组成。 光电鼠标的控制芯片 控制芯片负责协调光电鼠标中各元器件的工作,并与外部电路进行沟通(桥接)及各种信号的传送与收取。我们可以将其理解成就是光电鼠标中的“管家婆”,实现与主板USB接口之间的桥接。当然,它也具备了一块控制芯片所应该具备的控制、传输、协调等功能。 这里有一个非常重要的概念大家应该知道,就就是dpi对鼠标定位的影响。dpi就是它用来衡量鼠标每移动一英寸所能检测出的点数,dpi越小,用来定位的点数就越少,定位精度就低;dpi 越大,用来定位点数就多,定位精度就高。 光学感应器 光学感应器就是光电鼠标的核心。 光学感应器主要由CMOS感光块(低档摄像头上采用的感光元件)与DSP组成。CMOS感光块负责采集、接收由鼠标底部光学透镜传递过来的光线(并同步成像),然后CMOS感光块会将一帧帧生成的图像交由其内部的DSP进行运算与比较,通过图像的比较,便可实现鼠标所在位置的定位工作。
光学透镜组件 光学透镜组件被放在光电鼠标的底部位置,从图中可以清楚地瞧到,光学透镜组件由一个棱光镜与一个圆形透镜组成。 其中,棱光镜负责将发光二极管发出的光线传送至鼠标的底部,并予以照亮。圆形透镜则相当于一台摄像机的镜头,这个镜头负责将已经被照亮的鼠标底部图像传送至光学感应器底部的小孔中。通过观瞧光电鼠标的背面外壳,我们可以瞧出圆形透镜很像一个摄像头。 不管就是阻断棱光镜还就是圆形透镜的光路,均会立即导致光电鼠标“失明”。其结果就就是光电鼠标无法进行定位,由此可见光学透镜组件的重要性。 发光二极管 光学感应器要对缺少光线的鼠标底部进行连续的“摄像”,自然少不了“摄影灯”的支援。否则,从鼠标底部摄到的图像将就是一片黑暗,黑暗的图像无法进行比较,当然更无法进行光学定位了。 通常,光电鼠标采用的发光二极管就是红色的(也有部分就是蓝色的),且就是高亮的(为了获得
光电鼠标与机械鼠标工作原理之不同
光电鼠标与机械鼠标工作原理之不同 光电鼠标与机械式鼠标最大的不同之处在于其定位方式不同。光电鼠标的工作原理是:在光电鼠标内部有一个发光二极管,通过该发光二极管发出的光线,照亮光电鼠标底部表面。然后将光电鼠标底部表面反射回的一部分光线,经过一组光学透镜,传输到一个光感应器件内成像。当光电鼠标移动时,其移动轨迹便会被记录为一组高速拍摄的连贯图像。最后利用光电鼠标内部的一块专用图像分析芯片对移动轨迹上摄取的一系列图像进行分析处理,通过对这些图像上特征点位置的变化进行分析,来判断鼠标的移动方向和移动距离,从而完成光标的定位。 光电鼠标通常由以下部分组成:光学感应器、光学透镜、发光二极管、接口微处理器、轻触式按键、滚轮、连线、PS/2或USB接口、外壳等。 光学感应器 光学感应器是光电鼠标的核心,目前能够生产光学感应器的厂家只有安捷伦、微软和罗技三家公司。其中,安捷伦公司的光学感应器使用十分广泛,除了微软的全部和罗技的部分光电鼠标之外,其他的光电鼠标基本上都采用了安捷伦公司的光学感应器。 光电鼠标的控制芯片
控制芯片负责协调光电鼠标中各元器件的工作,并与外部电路进行沟通及各种信号的传送和收取。可以将其理解成是光电鼠标中的“管家婆”。 一个非常重要的概念,就是dpi对鼠标定位的影响。dpi 是它用来衡量鼠标每移动一英寸所能检测出的点数,dpi越小,用来定位的点数就越少,定位精度就低;dpi越大,用来定位点数就多,定位精度就高。 通常情况下,传统机械式鼠标的扫描精度都在200dpi 以下,而光电鼠标则能达到400甚至800dpi,这就是为什么光电鼠标在定位精度上能够轻松超过机械式鼠标的主要原因。 光学透镜组 光学透镜组件被放在光电鼠标的底部位置,从图5中可以清楚地看到,光学透镜组件由一个棱光镜和一个圆形透镜组成。其中,棱光镜负责将发光二极管发出的光线传送至鼠标的底部,并予以照亮。 圆形透镜则相当于一台摄像机的镜头,这个镜头负责将已经被照亮的鼠标底部图像传送至光学感应器底部的小孔中。通过观看光电鼠标的背面外壳,我们可以看出圆形透镜很像一个摄像头通过试验,笔者得出结论:不管是阻断棱光镜还是圆形透镜的光路,均会立即导致光电鼠标“失明”。其结果就是光电鼠标无法进行定位,由此可见光学透镜组件
鼠标的主要器件
1、分辨率 光电鼠标的分辨率通常用CPI(Count Per Inch : 每英寸的测量次数)来表示,CPI 越高,越利于反映玩家的微小操作。而且在鼠标光标移动相同逻辑距离时,分辨率高的需要移动的物理距离则要短。拿一款800 CPI的光电鼠标来说,当使用者将鼠标移动1英寸时,其光学传感器就会接收到反馈回来的800个不同的坐标点,鼠标箭头同时会在屏幕上移动800个像素点。反过来,鼠标箭头在屏幕上移动一个像素点,就需要鼠标物理移动1/800英寸的距离。所以,CPI高的鼠标更适合在高分辨率的屏幕下使用。光学机械鼠标的分辨率多为200~400 CPI,而光电鼠标的分辨率通常在400~800 CPI之间。 除CPI以外,DPI(Dots Per Inch : 每英寸像素数)也常被人用来形容光电鼠标的分辨率。由于光电鼠标的分辨率反映了一个动态过程,所以用CPI来形容更恰当些。但无论是CPI还是DPI,描述的都是光电鼠标的分辨率,不存在性能差别。 2、刷新频率 光电鼠标的刷新频率也被称为扫描频率或者帧速率,它反映了光学传感器内部的DSP对CMOS每秒钟可拍摄图像的处理能力。在鼠标移动时,光学传感器中的数字处理器通过对比所“拍摄”相邻照片间的差异,从而确定鼠标的具体位移。但当光电鼠标在高速运动时,可能会出现相邻两次拍摄的图像中没有明显参照物的情况。那么,光电鼠标势必无法完成正确定位,也就会出现我们常说的“跳帧”现象了。而提高光电鼠标的刷新频率就加大了光学传感器的拍摄速度,也就减少了没有相同参考物的几率,达到了减少跳帧的目的。 3、像素处理能力 虽然分辨率和刷新率都是光电鼠标重要的技术指标,但它们并不能客观反映光电鼠标的性能,所以罗技提出了像素处理能力这个指标,并规定:像素处理能力=CMO晶阵像素数×刷新频率。根据光电鼠标的定位原理我们知道,光学传感器会将CMOS拍摄的图像进行光学放大后再投射到CMOS晶阵上形成帧,所以在光学放大率一定的情况下,增加了CMOS晶阵像素数,也就可增大实际拍摄图像的面积。而拍摄面积越大,每帧图像上的细节也就越清晰,参考物也就越明显,和提高刷新率一样,也可减少跳帧的几率。 不过,需要注意的是,大多数情况下,厂商不会公布鼠标的CMOS尺寸,其大小从15x15到30x30像素(Pixel)不等。 光电鼠标的工作原理和内部构成 光电鼠标与机械式鼠标最大的不同之处在于其定位方式不同。光电鼠标的工作原理是:在光电鼠标内部有一个发光二极管,通过该发光二极管发出的光线,照亮光电鼠标底部表面(这就是为什么鼠标底部总会发光的原因)。然后将光电鼠标底部表面反射回的一部分光线,经过一组光学透镜,传输到一个光感应器件(微成像器)内成像。这样,当光电鼠标移动时,其移动轨迹便会被记录为一组高速拍摄的连贯图像。最后利用光电鼠
鼠标的原理,控制以及编程
鼠标的原理控制以及编程 联想研究院板卡中心臧超飞 前言. 鼠标作为现代计算机的一个标准配置已经深深的影响了计算机的使用者因此在BIOS中加入鼠标的功能将为计算机提供更好的人机接口为使用者使用计算机带来更大 的方便 不同类型的鼠标主要不同的表现在数据传输的协议上主要的协议有四种类型 1P S/2 2S erial 3U SB 4A DB 第一部分鼠标与系统架构 图1鼠标与系统架构 图一是一个典型的现代PC的鼠标配置架构在最底层的硬件层鼠标作为一个单片机 通过PS/2协议和系统的KBC进行通讯传递数据和命令 第二层BIOS通过KBC上提供的60H和64H口和鼠标进行传递信息由此可以看出KBC封装了PS/2协议使得PS/2协议对于底层编程而言是通明的同样我们本文的主要 内容也是基于KBC之上而跨越PS/2协议的 第三层BIOS提供了基本的INT15H中断的调用使用者可以通过这个中断的调用给 鼠标发送一些基本配置的命令注意INT15H没有提供鼠标的运行命令和数据接受接口 第四层次系统Driver可以通过BIOS的INT15H的中断调用或者直接通过KBC的60H 64H口控制鼠标同时向上为操作系统和应用程序提供服务 第二部分PS/2协议以及鼠标的基本命令 1信号定义 PS/2协议主要包括两根信号线如图2CLK和DATA还有+5V的电源线和鼠标线DATA
线是半双工的正常状态下CLK和DATA被主机端的一个510K的电阻拉高到5V见图3但是鼠标和主机KBC在任何时候都可以将这两个信号拉低当端口处于空闲的 状态是LCK和DATA线都处于高电平主机可以在任何时候通过拉低CLK信号切断设备 图2PS/2 电缆以及接口信号定义 图3鼠标系统原理图 2数据传输 数据的传输是一个字节一个字节Byte传输的对于每一次的数据传输包括一个开始位a logic 08个数据内容的比特bits一个奇偶校验位odd parity和一个停止位 a logic 0我们可以可以很容易看出8个数据位和奇偶校验位一起那么其奇偶性必定是奇的 在传输过程中设备首先将CLK信号拉低产生CLK信号传输这十一个位bits传输设备通过拉高或者悬浮DATA信号来传输logic 0或logic 1 在传输过程中设备可能处于三种传输状态 a.空闲态Idle这时CLK信号和DATA信号都处于高电平态总线上没有传输行为 b.抑制态Inhibit这时主机将CLK信号拉低设备将被从数据传输中切断 c.请求传输Request to send这时主机将DATA信号拉低报纸CLK信号那么主机 就是准备发送命令或者命令参数 (1)输出到主机 3命令集 如果鼠标以及处于流模式Stream Mode而且已经被Enable$F4命令激活那么在给鼠标发送任何命令之前必须先将鼠标Disable$F4这样可以保证命令响应以及数据传输的 完整性这一点非常类似于我们在C语言读写文件中间一定要注意关闭文件用以保证将缓冲区中的内容写到磁盘上因此如果我们在这种模式下发送了命令那么鼠标将会放弃而不是中断所有的数据传输包的传输以及命令的响应 $FF复位命令Reset这个命令将引起鼠标的软件复位和重新校准鼠标的回应
光电鼠标工作原理 物理
光电鼠标基础知识浅解 ——普通物理课外作业 班级:10-生物技术 姓名:李向阳 学号:201006040063
光电鼠标基础知识浅解 互联网的普及空前地打破了空间、时间的界限,小小鼠标,大大世界,点击之间,精彩萦绕你眼前。使用最广泛的鼠标有机械鼠标和光电鼠标,与传统的机械式鼠标相比,光电鼠标具有定位准确、移动流畅且不易脏污等优势,受到越来越多用户的认可。随着光电鼠标价格的不断下跌,取代机械式鼠标而成为市场主流的趋势已不可阻挡。 机械鼠标光电鼠标 光电鼠标的工作原理 光电鼠标定位的工作流程大致为:发光二极管照亮采样表面,对比度强烈的待采样影像通过透镜在CMOS(Complementary Metal Oxide Semiconductor---互补金属氧化物半导体,电压控制的一种放大器件。是组成CMOS数字集成电路的基本单元,CMOS制造工艺也被应用于制作数码影像器材的感光元件)上成像,CMOS将光学影像转化为矩阵电信号传输给DSP(digital singnal processor---数字信号处理器。其工作原理是接收模拟信号,转换为0或1的数字信号,再对数字信号进行修改、删除、强化,并在其他系统芯片中把数字数据解译回模拟数据或实际环境格式)。当鼠标移动时,DSP则将此影像信号与存储的上一采样周期的影像进行比较分析,然后发送一个位移距离信号到接口电路。接口电路对由DSP 发来的位移信号进行整合处理,而已传入计算机内部的位移信号再经过驱动程序的进一步处理,最终在系统中形成光标的位移。 光电鼠标的参数 分辨率
光电鼠标的分辨率通常用CPI(Count Per Inch : 每英寸的测量次数)来表示,CPI 越高,越利于反映用户的微小操作。而且在鼠标光标移动相同逻辑距离时,分辨率高的需要移动的物理距离则要短。拿一款800 CPI的光电鼠标来说,当使用者将鼠标移动1英寸时,其光学传感器就会接收到反馈回来的800个不同的坐标点,鼠标箭头同时会在屏幕上移动800个像素点。反过来,鼠标箭头在屏幕上移动一个像素点,就需要鼠标物理移动1/800英寸的距离。所以,CPI高的鼠标更适合在高分辨率的屏幕下使用。光学机械鼠标的分辨率多为200~400 CPI,而光电鼠标的分辨率通常在400~800 CPI之间。 除CPI以外,DPI(Dots Per Inch : 每英寸像素数)也常被人用来形容光电鼠标的分辨率。由于光电鼠标的分辨率反映了一个动态过程,所以用CPI来形容更恰当些。但无论是CPI还是DPI,描述的都是光电鼠标的分辨率,不存在性能差别。 刷新频率 光电鼠标的刷新频率也被称为扫描频率或者帧速率,它反映了光学传感器内部的DSP对CMOS每秒钟可拍摄图像的处理能力。在鼠标移动时,光学传感器中的数字处理器通过对比所“拍摄”相邻照片间的差异,从而确定鼠标的具体位移。但当光电鼠标在高速运动时,可能会出现相邻两次拍摄的图像中没有明显参照物的情况。那么,光电鼠标势必无法完成正确定位,也就会出现我们常说的“跳帧”现象了。而提高光电鼠标的刷新频率就加大了光学传感器的拍摄速度,也就减少了没有相同参考物的几率,达到了减少跳帧的目的。 像素处理能力 虽然分辨率和刷新率都是光电鼠标重要的技术指标,但它们并不能客观反映光电鼠标的性能,所以罗技(罗技是全球著名的电脑周边设备供应商)提出了像素处理能力这个指标,并规定:像素处理能力=CMO晶阵像素数×刷新频率。根据光电鼠标的定位原理我们知道,光学传感器会将CMOS拍摄的图像进行光学放大后再投射到CMOS晶阵上形成帧,所以在光学放大率一定的情况下,增加了CMOS晶阵像素数,也就可增大实际拍摄图像的面积。而拍摄面积越大,每帧图像上的细节也就越清晰,参考物也就越明显,和提高刷新率一样,也可减少跳帧的几率。 不过,需要注意的是,大多数情况下,厂商不会公布鼠标的CMOS尺寸,其大小从15x15到30x30像素(Pixel)不等。 光电鼠标的内部构成 从功能实现角度看,光电鼠标主要由发光二极管、固定夹、光学透镜、光学传感器、接口控制器芯片以及微动开关6部分元器件组成。
光电鼠标电路剖析及简单维修
光电鼠标电路剖析及简单维修 发布者:1770309616发布时间:2012-3-114:18 关键词:光电鼠标,电路剖析,维修 光电鼠标的电路一般都比较简单,大多由二块集成电路组成。一块稍大的是COMS感光IC,另一块一般为鼠标专用IC。感光CMOS芯片通过鼠标移动产生的光线变化而得到位置信号,送到鼠标IC的X、Y输入端。而鼠标IC再收集左、右,滚轮键及滚轮前滚、后滚等信息随着CL K时钟信号一起送到 PS2或USB口中去。 一、USB光电鼠标。图1为使用GL603-USB鼠标IC芯片及安捷伦的H2000(400CPI、 每秒1500次扫描)为光电感应芯片的电路图。 二、PS2接口鼠标 图2为使用PAN101-208(第三代光电IC产品,800CPI光学分辨率,2000次扫描/秒)为光电感应芯片,84510系列芯片为鼠标IC的PS2接口光电鼠标电路。光电鼠标IC一般来说都比较可靠。坏的多是按键开关或是鼠标线。鼠标线四根芯中,如果VCC或GND断线时,会出现光电鼠底面感光处无红光发出,鼠标无法使用的故障。当CL K或DATA断线时,出现鼠标虽然有红光发出,但光标不动及所有按键无反应的故障。如果出现某个按键失灵时,基本是这个按键开关坏了。更换线及开关时,可以从旧的机械鼠上拆下来代用。如果光电鼠标出现某个方向移动时光标变得很慢,很可能是反射的凸镜脏了,清洗即可。
高性能光电鼠标原理及电路图 高精度光学引擎新贵自由豹210关键字:光学引擎无线鼠标
新贵的自由豹210无线鼠标应用了“九九互联,九九过界”技术,在定位和连接方面都有着出色的表现。 新贵自由豹210无线鼠标线条硬朗,设计十分现代,并有亚黑和酒红两种配色可供选择,满足不同用户的需求。这款鼠标内置高精度光学引擎,具有良好的兼容能力,可在木桌、玻璃等多种表面上正常工作,最高分辨率达到了1600dpi,并支持800/1200/1600dpi三档调节,适合不同尺寸的显示器。在安装驱动后,还能对按键功能、移动灵敏度等进行自由设定。 新贵自由豹210无线鼠标采用2.4G无线连接,具有75组频道,支持自动跳频防干扰,有效使用距离可达10米,配备的Mini接收器小巧便携,还能同时连接多个相兼容的无线键鼠,节省了宝贵的USB接口。
鼠标的结构及工作原理
鼠标的结构及工作原理 鼠标器(Mouse)是一种相当普通的、廉价的点输入设备(Pointing Device)。随着Windows 的日益流行,鼠标对于大多数的PC机用户来说已必不可少。较之其他的点设备(如跟踪球、数字化仪、光笔、触摸屏等),它更为便宜和方便,所以鼠标在PC机上的应用相当普及。鼠标器按与电脑连接的方式(即接口)分为:通过串行口与电脑建立连接的串口鼠标,及通过PS/2口与电脑建立连接的过PS/2鼠标。当鼠标器在平面上移动时,随着移动的方向和快慢的变化,会产生两个在高低电平之间不断变化的脉冲信号,主机接收这两个脉冲信号,并对其计数。根据接收到的这两个脉冲信号的个数,来控制电脑屏幕上的鼠标器指针在横(X)轴、纵(Y)轴两个方向上移动距离的大小。按照该方式,即可以控制鼠标器指针在屏幕上随意地移动。 脉冲信号是由鼠标器内的半导体光敏器件产生的。根据结构的不同,鼠标器主要可分为机电式鼠标和光电式鼠标。 机电式鼠标的底部有一个实心的橡胶球,内部有两个互相垂直的滚轴靠在橡胶球上。在两个滚轴的顶端,各装有一个开有径向槽(或开窗格)的光栅轮。光栅轮的两侧分别安装着由发光二极管和光敏三极管构成的光电检测电路。当移动鼠标器,橡胶球滚动时,带动滚轴及其上的光栅轮旋转。因为光栅轮开槽处透光,使得光敏三极管接收到由发光二极管发出的光线时断时续,从而产生不断变化的高低电平,形成脉冲电信号。互相垂直的两个轴对应着屏幕平面上的横(X)轴、纵(Y)轴两个方向。脉冲信号的数量对应着位移的大小。 机电式鼠标一般用摩擦滚动球的方法来进行操作,所以使用极为方便,价格也便宜。但是,这类鼠标则容易因轻微的振动,包括滚动球的跳动及滚动球与X、Y传感滚柱之间的相对位置的变化等因素而影响其精度,而且其重复定位精度也较差。由于有滚动球、传感滚柱、辅助滚柱等机械部件,故机电式鼠标器也容易因机械故障而失灵。 光电式鼠标器没有橡胶球和带光栅的轮的滚轴。这类鼠标器内的两对光电检测器互相垂直,光敏三极管检测发光二极管照射到鼠标器下面垫板上产生的反射光来进行工作,因此,光电式鼠标器工作时需要上面画有黑白相间格子的专用垫板。当发光二极管发出的光线照到黑格上,光线被吸收而无反射光;若光线照到白格上,则有反射光。光敏三极管据此而产生高低电平,形成脉冲信号。光电式鼠标没有机械部件,主要用光电位移传感器取代滚动球,所以不会出现机械故障的可能。这类传感器需要带有特制条纹或点状图案的垫子配合使用,因此光电式鼠标器有一个专用的光电极(反射板)。这类鼠标器的重定位精度较高,将鼠标从一个地点移到另一个地点再返回来,屏幕上的光标也将会精确地回到原来的位置。光电式鼠标的主要缺点是价格较贵,使用要受制于光电板的位置的局限。优点是精度高和故障率低。此外,还有一种称为轨迹球的鼠标器。它的工作原理与机电式鼠标器相同,内部结构也类似。差别是轨迹球鼠标器工作时球在上面,直接用手拨动,而球座固定不动。故轨迹球鼠标器占用的空间小,多用于便携机上。
光电鼠标原理与电路图
传统光学鼠标的工作原理 传统光学鼠标工作原理示意图 光学跟踪引擎部分横界面示意图 光学鼠标主要由四部分的核心组件构成,分别是发光二极管、透镜组件、光学引擎(Optical Engine)以及控制芯片组成。 光学鼠标通过底部的LED灯,灯光以30度角射向桌面,照射出粗糙的表面所产生的阴影,然后再通过平面的折射透过另外一块透镜反馈到传感器上。 当鼠标移动的时候,成像传感器录得连续的图案,然后通过“数字信号处理器”(DSP)对每张图片的前后对比分析处理,以判断鼠标移动的方向以及位移,从而得出鼠标x, y方向的移动数值。再通过SPI传给鼠标的微型控制单元(Micro Controller Unit)。鼠标的处理器对这些数值处理之后,传给电脑主机。传统的光电鼠标采样频率约为3000 Frames/sec(帧/秒),也就是说它在一秒钟内只能采集和处理3000张图像。 根据上面所讲述的光学鼠标工作原理,我们可以了解到,影响鼠标性能的主要因素有哪些。 第一,成像传感器。成像的质量高低,直接影响下面的数据的进一步加工处理。 第二,DSP处理器。DSP处理器输出的x,y轴数据流,影响鼠标的移动和定位性能。
第三,SPI于MCU之间的配合。数据的传输具有一定的时间周期性(称为数据回报率),而且它们之间的周期也有所不同,SPI主要有四种工作模式,另外鼠标采用不同的MCU,与电脑之间的传输频率也会有所不同,例如125MHZ、8毫秒;500MHz,2毫秒,我们可以简单的认为MCU可以每8毫秒向电脑发送一次数据,目前已经有三家厂商(罗技、Razer、Laview)使用了2毫秒的MCU,全速USB设计,因此数据从SPI传送到MCU,以及从MCU传输到主机电脑,传输时间上的配合尤为重要。 光电鼠标电路图
鼠标工作原理以及流程(版权所有)
2.4 GHz无线鼠标键盘接收器的设计 ?随着无线通信技术的不断发展,近距离无线通信领域出现了蓝牙、RFID、WIFI等技术。 这些技术不断应用在嵌入式设备及PC外设中。2.4 GHz无线鼠标键盘使用24~2.483 5 GHz无线频段,该频段在全球大多数国家属于免授权使用,这为无线产品的普及扫清了最大障碍。用户可迅速地进入与世界同步的无线设计领域,最大限度地缩短设计和生产时间,并且具有完美性能,能够替代蓝牙技术。 1 系统硬件结构 ?2.4 GHz无线鼠标键盘接收器主要实现鼠标、键盘等HID类设备在PC机上的枚举识别过程和接收无线鼠标或键盘发送的数据(包括按键值、鼠标的上下左右移动等),并将接收到的数据通过USB接口传送给PC机,实现鼠标键盘的无线控制功能。接收器主要由USB接口部分、MCU和无线接收部分组成。系统硬件框图如图l所示。 1. 1 USB接口部分 系统采用H OLT EK公司生产的8位USB多媒体键盘编码器HT82K95E作为系统核心。鼠标、键盘等HID类设备为低速设备,所以接收器要能同时实现鼠标和键盘数据同PC机的双向传输。MCU首先必须具有低速的USB接口,并且最少支持3个端点(包括端点O)。综合考虑选用了 HT82K95E作为本系统的主控芯片。 本系统的USB接口部分电路图如图2所示,其中电阻R100、R101、R102、R103、R104和电容C102、C114和C115用于EMC。由于鼠标和键盘设备属于从设备,所以应在USB-信号线上加1.5 k?的上拉电阻。
1.2 MCU部分 MCU的复位电路采用由R108和C105组成的RC积分电路实现上电复位功能。上电瞬间,由于电容电压不能突变,所以复位引脚为低电平,然后电容开始缓慢充电,复位引脚电位开始升高,最后变为高电平,完成芯片的上电复位。HT82K95E微控制器内部还包含一个低电压复位电路(LVR),用于监视设备的供电电压。如果设备的供电电压下降到0.9 V~VLVR的范围内并且超过1 ms的时间,那么LVR就会自动复位设备。 应当注意的是对于该设备的复位电路,还应加1个二极管1N4148,接法如图2中的VD100。如果不加此二极管,设备在第一次使用时能够正常复位,但在以后的使用却无法正常复位,原因是电容中的电荷无法释放掉,而该二极管可以通过整个电路快速释放掉电容中的电荷。 由于n RF24L01的数据包处理模式支持与单片机低速通信而无线部分高速通信,并且nRF24L01内部有3个不同的RX FIFO寄存器和3个不同的TX FIFO寄存器,在掉电模式下、待机模式下和数据传输的过程中MCU可以随时访问FIFO寄存器。这就允许SPI接口低速传送数据,并且可以应用于MCU 硬件上没有SPI接口的情况下。因此在设计中使用HT82K95E 的PA口模拟SPI总线与nRF42L01的SPI接口通信。
鼠标的产品结构设计分析
鼠标的产品结构设计分析
目录 一、鼠标的分类 (5) 1.1 鼠标按其工作原理及其内部结构的不同可以分为机械式和光电式 (5) 1.1.1 机械鼠标 (5) 1.1.2 光电鼠标 (5) (6) (6) (6) 1.2.3 多键鼠标 (6) (7) (7) 7 1.4 连接方式,分为有线鼠标和无线鼠标7 1.4.1 无线鼠标 (7) (8) (8) 1.5.1 滚轴鼠标 (8)
1.5.2 感应鼠标 (8) 1.5.3 3D振动鼠标 (9) 二、典型鼠标在形态,材料,功能上的分析 (9) 雷柏3500P超薄无线鼠标 (9) 游戏鼠标 (9) Swiftpoint GT 自然触摸手势鼠标 (9) Logitech/罗技M557无线蓝牙鼠标 (10) 三、惠普FM500鼠标的使用方面的分析 (10) 3.1 重要参数介绍 (10) 3.2 功能介绍 (10) 3.2.1 柔软舒适滚轮设计 (10) 3.2.2 兼容性强 (11) 3.2.3 人体工程学设计 (11) 3.3 使用原理 (11) 3.4 使用过程 (12) 四、惠普FM500生态蓝影鼠标的结构分析 (12) 4.1 产品连接 (12) 4.1.1 机械连接销连接 (12)
4.1.2 机械连接弹性卡口连接.. 12 4.1.3 活动连接 (13) 4.1.4 弹性连接 (13) 五、模型展示 (13) 5.1 各零件展示 (13) 5.2 爆炸图展示 (15) 六、鼠标的改进性建议 (15) 七、设计心得 (15) 7.1 想 (16) 7.2 练 (16) 7.3 久 (16)
鼠标的工作原理
鼠标那点事——鼠标工作原理分析 前言 经历了数年的飞速发展,如今的电脑配件以及周边的外设已经越来越好,我们最常用的鼠标从滚轮到光电,从有线到无线,有着惊人的改变。不过在鼠标的工作原理方面,依然延续着昔日的经典,没有太多的改变,只是如今的鼠标在性能上有着不小的突破。 尽管鼠标产品现在已经成为我们每天工作娱乐的必需品,但是对于鼠标的工作原理,相信了解的朋友并不多,毕竟技术这种东西比较枯燥,人们没有太多的兴趣。不过今天小编在这里还是要给大家来温习一下鼠标的工作原理,感兴趣的朋友不妨关注一下哦。
机械鼠标的工作原理 机械鼠标是通过移动鼠标,带动胶球,胶球滚动又磨擦鼠标内分管水平和垂直两个方向的栅轮滚轴,驱动栅轮转动。栅轮轮沿为格栅状。紧靠栅轮格栅两侧,一侧是一红外发光管,另一侧是红外接收组件。红外接收组件为一三端器件,其中包含甲乙两个红外接收管。在水平和垂直栅轮夹角正对方向有一压紧轮,它使胶球无论向何方向滚动都始终压紧在两个栅轮轴上。
通过ps/2 口或串口与主机相连。接口使用四根线,分别为电源,地,时钟和数据。正常工作时,鼠标的移动转换为水平和垂直栅轮不同方向和转速的转动。栅轮转动时,栅轮的轮齿周期性遮挡红外发光管发出的红外线照射到接收组件中的甲管和乙管,从而甲和乙输出端输出电脉冲至鼠标内控制芯片。由于红外接收组件中甲乙两管垂直排列,栅轮轮齿夹在红外发射与接收中间的部分的移动方向为上下方向,而甲乙接收管与红外发射管的夹角不为零,于是甲乙管输出的电脉冲有一个相位差。鼠标内控制芯片通过此脉冲相位差判知水平或垂直栅轮的转动方向,通过此脉冲的频率判知栅轮的转动速度,并不断通过数据线向主机传送鼠标移动信息,主机通过处理使屏幕上的光标同鼠标同步移动。
鼠标那点事鼠标工作原理分析
鼠标那点事——鼠标工作原理分析2010-02-24 00:00:00 王成| 责编: 王成CBSi中国·PChome | 作者: 本文导航?页:前言1第?页:机械鼠标的工作原理2第?页:光电鼠标工作原理3第?)2第4页:光电鼠标工作原理(?页:总结5第1前言 经历了数年的飞速发展,如今的电脑配件以及周边的外设已经越来越好,我们最常用的鼠标从滚轮到光电,从有线到无线,有着惊人的改变。不过在鼠标的工作原理方面,依然延续着昔日的经典,没有太多的改变,只是如今的鼠标在性能上有着不小的突
破。. 尽管鼠标产品现在已经成为我们每天工作娱乐的必需品,但是对于鼠标的工作原理,相信了解的朋友并不多,毕竟技术这种东西比较枯燥,人们没有太多的兴趣。不过今天小编在这里还是要给大家来温习一下鼠标的工作原理,感兴趣的朋友不妨关注一下
哦。. 2机械鼠标的工作原理 机械鼠标是通过移动鼠标,带动胶球,胶球滚动又磨擦鼠标内分管水平和垂直两个方向的栅轮滚轴,驱动栅轮转动。栅轮轮沿为格栅状。紧靠栅轮格栅两侧,一侧是一红外发光管,另一侧是红
外接收组件。红外接收组件为一三端器件,其. 中包含甲乙两个红外接收管。在水平和垂直栅轮夹角正对方向有一压紧轮,它使胶球无论向何方向滚动都始终压紧在两个栅轮轴上。 通过ps/2 口或串口与主机相连。接口使用四根线,分别为电源,地,时钟和数据。正常工作时,鼠标的移动转换为水平和垂直栅轮不同方向和转速的转动。栅轮转动时,栅轮的轮齿周期性遮挡红外发光管发出的红外线照射到接收组件中的甲管和乙管,从而甲和乙输出端输出电脉冲至鼠标内控制芯片。由于红外接收组件中甲乙两管垂直排列,栅轮轮齿夹在红外发射与接收中间的部分的移动方向为上下方向,而甲乙接收管与红外发射管的夹角不为零,于是甲乙管输出的电脉冲有一个相位差。鼠标内控制芯片通过此脉冲相位差判知水平或垂直栅轮的转动方向,通过此脉冲的频率判知栅轮的转动速度,并不断通过数据线向主机传送鼠标移动信息,主机通过处理使屏幕上的光标同鼠标同步移
光电鼠标的原理
光电鼠标的工作原理 摘要本文从结构、工作原理、性能参数以及和传统鼠标的对比等几个方面详细介绍了光电鼠标,并且简单介绍了激光鼠标的相关特性,最后对鼠标的未来发展趋势进行了简单的展望。 关键词光电鼠标光学感应器激光鼠标发展趋势 一、鼠标的概述 鼠标,全称为光电显示系统纵横位置指示器,是计算机系统的一种输入设备,因形似老鼠而得名。按其工作原理及其内部结构的不同可以分为机械式鼠标,光机式鼠标和光电式鼠标。下面将简单介绍机械式鼠标和光机式鼠标的工作原理: 1、机械式鼠标 机械鼠标主要由滚球、辊柱和光栅信号传感器组成。当拖动鼠标时,带动滚球转动,滚球又带动辊柱转动,装在辊柱端部的光栅信号传感器产生的光电脉冲信号反映出鼠标器在垂直和水平方向的位移变化,再通过电脑程序的处理和转换来控制屏幕上光标箭头的移动。这种机械鼠标的底部采用一个可四向滚动的胶质小球。这个小球在滚动时会带动一对转轴转动,分别为X转轴、Y转轴,在转轴的末端都有一个圆形的译码轮,译码轮上附有金属导电片与电刷直接接触。当转轴转动时,这些金属导电片与电刷就会依次接触,出现“接通”或“断开”两种形态,前者对应二进制数“1”、后者对应二进制数“0”。接下来,这些二进制信号被送交鼠标内部的专用芯片作解析处理并产生对应的坐标变化信号。只要鼠标在平面上移动,小球就会带动转轴转动,进而使译码轮的通断情况发生变化,产生一组组不同的坐标偏移量,反应到屏幕上,就是光标可随着鼠标的移动而移动。由于它采用纯机械结构,定位精度难如人意,加上频频接触的电刷和译码轮磨损得较为厉害,直接影响了机械鼠标的使用寿命。在流行一段时间之后,它就被成本同样低廉的“光机鼠标”所取代,后者正是现在市场上还很常见的所谓“机械鼠标”。 2、光机式鼠标 光机式鼠标,顾名思义是一种光电和机械相结合的鼠标。它在机械鼠标的基础上,将磨损最厉害的接触式电刷和译码轮改为非接触式的LED对射光路元件。当小球滚动时,
无线鼠标原理简介
无线鼠标原理 无线鼠标原理简介: 目前的市场上售卖的基本上都是光学鼠标和激光鼠标,更古老的机械鼠标、光电机械鼠标都已经淘汰,无线鼠标也是如此。因此要明白无线鼠标的工作原理,其实并没有太大困难,可以简单理解为:无线鼠标=有线鼠标-数据线+无线模块,这样是不是直白多了呢?
光学鼠标的工作原理如上图,LED或者Laser发出的光通过透镜,照射在鼠标工作表面(比如鼠标垫、或者桌面)上,部分反射光通过透镜进入成像传感器成像,并提供给图像分析芯片(DSP 数字微处理器)进行分析;当鼠标移动时,传感器就会截获一组高速拍摄的连贯图像,经DSP芯片分析处理后,得出鼠标的移动方向和移动量,并将这一信息传输给电脑,于是便有了桌面光标的移动行为。 CMOS成像传感器和DSP两部分合称鼠标的光学引擎,激光引擎和普通光学引擎的差异是,采用了具有相干性、波长单一、功率集中的激光(Laser)取代LED光来照射工作表面,这样可以提高鼠标对不同工作表面的适应能力,目前高端无线鼠标也大都采用激光引擎。
图中NRF字样的小方块就是2.4G无线芯片 其实无线鼠标和传统有线鼠标基本上是一样的,区别主要集中在最后一步的数据传输方式上,有线鼠标通过PS/2或者USB接口的数据线传输信息,而无线鼠标则采用红外、27MHz、2.4GHz和蓝牙等无线传输技术发送数据,摒弃了数据线,使用起来“无牵无挂”,自然更加方便。 无线传输技术介绍: 无线技术根据不同的用途和频段被分为不同的类别,其中包括蓝牙、Wi-Fi (IEEE 802.11)、Infrared (IrDA)、ZigBee (IEEE 802.15.4)等等多个无线技术标准,但市场上产品最多、消费者接触最广的,也仅有27Mhz、2.4G和蓝牙无线鼠标共三类。 27 MHz RF技术
鼠标的组成及工作原理
鼠标的组成及工作原理 1,分类 鼠标按接口类型可分为串行鼠标、PS/2鼠标、总线鼠标、USB鼠标(多为多为光电鼠标)四种 鼠标按其工作原理及其内部结构的不同可以分为机械式,光机式和光电式2,组成 光电鼠标通常由以下部分组成:光学感应器、光学透镜、发光二极管、接口微处理器、轻触式按键、滚轮、连线、PS/2或USB接口、外壳等。 3,工作原理
管脚排列 管脚说明
这里主要介绍光电鼠标 光电鼠标器是通过红外线或激光检测鼠标器的位移,将位移信号转换为电脉冲信号,再通过程序的处理和转换来控制屏幕上的光标箭头的移动的一种硬件设备。光电鼠标的光电传感器取代了传统的滚球。这类传感器需要与特制的、带有条纹或点状图案的电垫板配合使用 光电鼠标器是通过检测鼠标器的位移,将位移信号转换为电脉冲信号,再通过程序的处理和转换来控制屏幕上的光标箭头的移动。光电鼠标用光电传感器代替了滚球。这类传感器需要特制的、带有条纹或点状图案的垫板配合使用。与光机鼠标发展的同一时代,出现一种完全没有机械结构的数字化光电鼠标。设计这种光电鼠标的初衷是将鼠标的精度提高到一个全新的水平,使之可充分满足专业应用的需求。这种光电鼠标没有传统的滚球、转轴等设计,其主要部件为两个发光二极管、感光芯片、控制芯片和一个带有网格的反射板(相当于专用的鼠标垫)。工作时光电鼠标必须在反射板上移动,X发光二极管和Y 发光二极管会分别发射出光线照射在反射板上,接着光线会被反射板反射回去,经过镜头组件传递后照射在感光芯片上。感光芯片将光信号转变为对应的数字信号后将之送到定位芯片中专门处理,进而产生X-Y坐标偏移数据。
光电鼠标原理
光电鼠标器是通过红外线或激光检测鼠标器的位移,将位移信号转换为电脉冲信号,再通过程序的处理和转换来控制屏幕上的光标箭头的移动的一种硬件设备。光电鼠标的光电传感器取代了传统的滚球。这类传感器需要与特制的、带有条纹或点状图案的垫板配合使用 光电鼠标的工作原理 光电鼠标与机械式鼠标最大的不同之处在于其定位方式不同。 光电鼠标的工作原理是:在光电鼠标内部有一个发光二极管,通过该发光二极管发出的光线,照亮光电鼠标底部表面(这就是为什么鼠标底部总会发光的原因)。然后将光电鼠标底部表面反射回的一部分光线,经过一组光学透镜,传输到一个光感应器件(微成像器)内成像。这样,当光电鼠标移动时,其移动轨迹便会被记录为一组高速拍摄的连贯图像。最后利用光电鼠标内部的一块专用图像分析芯片(DSP,即数字微处理器)对移动轨迹上摄取的一系列图像进行分析处理,通过对这些图像上特征点位置的变化进行分析,来判断鼠标的移动方向和移动距离,从而完成光标的定位。 光电鼠标通常由以下部分组成:光学感应器、光学透镜、发光二极管、接口微处理器、轻触式按键、滚轮、连线、PS/2或USB接口、外壳等。下面分别进行介绍: 光学感应器 光学感应器是光电鼠标的核心,目前能够生产光学感应器的厂家只有安捷伦、微软和罗技三家公司。其中,安捷伦公司的光学感应器使用十分广泛,除了微软的全部和罗技的部分光电鼠标之外,其他的光电鼠标基本上都采用了安捷伦公司的光学感应器。 光电鼠标的控制芯片 控制芯片负责协调光电鼠标中各元器件的工作,并与外部电路进行沟通(桥接)及各种信号的传送和收取。我们可以将其理解成是光电鼠标中的“管家婆”。 这里有一个非常重要的概念大家应该知道,就是dpi对鼠标定位的影响。dpi是它用来衡量鼠标每移动一英寸所能检测出的点数,dpi越小,用来定位的点数就越少,定位精度就低;dpi越大,用来定位点数就多,定位精度就高。 通常情况下,传统机械式鼠标的扫描精度都在200dpi以下,而光电鼠标则能达到400甚至800dpi,这就是为什么光电鼠标在定位精度上能够轻松超过机械式鼠标的主要原因。 光学透镜组件 光学透镜组件被放在光电鼠标的底部位置,从图5中可以清楚地看到,光学透镜组件由一个棱光镜和一个圆形透镜组成。其中,棱光镜负责将发光二极管发出的光线传送至鼠标的底部,并予以照亮。
鼠标外壳的结构设计
鼠标外壳的结构设计姓名:刘孟铖 班级:材料1301 座号:02 指导老师:苏春锦 2016/5/18
一丶鼠标外壳 已有三十多年历史的鼠标,鼠标的外形由从英格尔巴特手中的“有两个滚轮、一个按钮的小木头盒子”开始,发展到了今天有着时尚外形、可以没有“尾巴”的无线鼠标,以及衍生到笔记本电脑的触摸式、推杆式鼠标,鼠标家族可谓“人丁兴旺”鼠标的外形也有原始的外形变得各种各样,如今各大厂商都已将目光投向了性能、时尚之外的舒适度上,其中的一个重要进步是把“人体工程学”引入了鼠标的设计,比如在设计鼠标时尽量使其与手掌、手指多接触,以便使用起来更舒服。一款优秀的鼠标首先是一款外观靓丽使用舒适且适合使用者手型大小的鼠标,而不同的使用者则应该根据自己的实际情况选择适合自己的鼠标。一般来说,一款优秀的鼠标表面做工应该细腻而流畅,外壳光滑却不至于滑手,更不该有任何明显的毛刺和突兀,而接缝也应该细腻而精细。 许多频繁使用鼠标的人会发现自己的腕骨突出,手指和手腕会经常出现酸疼的感觉,这就说明其鼠标的设计并没有体现以人为本的设计思想。而目前市场上一些优秀的鼠标则充分体现了人体工学的设计思想,在实际手握时应感觉轻松而舒适且与手掌面贴合,按键轻松而有弹性,而目前市场上流行的3D滚轮设计,则很大程度上方便了喜欢观看电子书和网页的用户,使他们不必再在翻页和拖动页面时移动鼠标了。 二丶鼠标外壳拆解图
鼠标外壳分为上壳,按键,和底板都可采用注射成型工艺。 三丶注射成型原理及工艺(书本P 53) 注射成型又称注射模塑,是热塑性塑料制品的一种主要成型方法,除个别热塑性塑料外,几乎所有的热塑性塑料都可用此方法成型,注射成型模具占据整个塑料膜的90%左右。近年来,注射成型已成功地用来成型某些热固定塑料制品。注射成型可成型各种各样形状的塑料制品,它的特点是成型周期短,能一次成型外型复杂丶尺寸精密丶带有嵌件的塑料制品,且生产效率高,易于实现自动化生产,所以广泛用于塑料制品的生产中。但是,注射成型的设备及模具制造费用较高,不适合单件及批量较小的塑料制品的生产。 四丶注塑材料 鼠标外壳的材料选择有多种。PT 、ABS等等。一般选择ABS。因为经济性的考虑。 ABS树脂为不透明、白色或淡黄色的粉状体或粒状体,比重1.02~1.08。ABS树脂极易染色,其制品表面可喷涂和电镀.全名是:丙烯氰—丁二烯—苯乙烯共聚物。 五丶注射成型工艺
无线鼠标工作原理
无线鼠标工作原理 主要是靠蓝牙技术传输信号。 DRF(Digital radio frequency,数字无线电频率)技术能够对短距离通讯提供充足的带宽,非常适合鼠标和键盘这样的外围设备使用,其原理非常简单,鼠标部分工作与传统鼠标相同,再用无线发射器把鼠标在X或Y轴上的移动,按键按下或抬起的信息转换成无线信号并发送出去,无线接收器收到信号后经过解码传递给主机,驱动程序告诉操作系统鼠标的动作,该把鼠标指针移向哪个方向或是执行何种指令。 采用高频无线电(射频)技术,只要在限定距离以内,就可以在任何位置使用,几乎不受障碍物的影响。一般传输的距离达10~20米,已经足够用户使用。 无线电的最大特点是可以进行360度全方位无线射频遥控,而且耗电量较低,具有触发工作待机休眠。无线设备的接受端已经内置接收器,发射器装在主机的设备口上,均不会影响产品外观。 无线电接收器本身所具有的接口是USB或PS2的,可以从计算机的PS/2接口取电,不需要另加电池。它具有双或多波段,如果有多个无线设备,均可以通过这一个接收器进行管理,键盘工作频率一般占用通道1(如:27.185M和27.035M),鼠标工作频率占用通道2(如:27.085M和27.135M),工作时鼠标和键盘或多个鼠标之间干扰性较低,而且不会影响无线电话等数字无线设备。 无线鼠标具有节能模式,采用低功耗芯片之余,还有多重省电措施,在运行模式下LED闪烁速度是1500次/s,而在最省电的模式下闪烁速度只有2次/s,移动鼠标或是按下鼠标按键,鼠标再迅速恢复到正常模式。此外,有的鼠标支持手动唤醒节能技术,在鼠标的两侧装配有导电橡胶,通过鼠标上的触摸开关来随意控制电源,当用户的手离开鼠标2秒钟后,鼠标就马上进入睡眠状态,用户需要使用鼠标时,只要手一触到导电橡胶,鼠标立即被激活,效率比多重节能模式更高。以上种种方式,都延长了电池的使用寿命,接近一般无线滚球鼠标的水平,约为三至六个月。当然,其耗电量再小也小不过传统鼠标 “鼠标”的标准称呼应该是“鼠标器”,英文名“Mouse”,它从出现到现在已经有38年的历史了。鼠标的使用是为了使计算机的操作更加简便,来代替键盘那繁琐的指令。 鼠标的接口类型:鼠标按接口类型可分为串行鼠标、PS/2鼠标、总线鼠标三种。串行鼠标是通过串行口与计算机相连,有9针接口和25针接口两种。PS/2鼠标通过一个六针微型DIN接口与计算机相连,它与键盘的接口非常相似,使用时注意区分。总线鼠标的接口在总线接口卡上。 鼠标的工作原理:鼠标按其工作原理的不同可以分为机械鼠标和光电鼠标。机械鼠标主要由滚球、辊柱和光栅信号传感器组成。当你拖动鼠标时,带动滚球转动,滚球又带动辊柱转动,装在辊柱端部的光栅信号传感器产生的光电脉冲信号反映出鼠标器在垂直和水平方向的位移变化,再通过电脑程序的处理和转换来控制屏幕上光标箭头的移动。光电鼠标器是通过检测鼠标器的位移,将位移信号转换为电脉冲信号,再通过程序的处理和转换来控制屏幕上的光标箭头的移动。光电鼠标用光电传感器代替了滚球。这类传感器需要特制的、带有条纹或点状图案的垫板配合使用。 另外,鼠标还可按外形分为两键鼠标、三键鼠标、滚轴鼠标和感应鼠标,两键鼠标和三键鼠标的左右按键功能完全一致,一般情况下,我们用不着三键鼠标的中间按键,但在使用某些特殊软件时(如AutoCAD等),这个键也会起一些作用;滚轴鼠标和感应鼠标在笔记本电脑