机械原理-凸轮
第四章 凸轮机构及其设计(8学时)
一、教学目的和教学要求
1、教学目的:使学生掌握凸轮机构设计的基础知识,并能根据生产实际需要的运动规律设计凸轮机构。
2、教学要求
1)了解凸轮机构的分类和应用
2)了解推杆常用的运动规律及推杆运动规律的选择原则。由于现代机器的
速度提高,几种常用的运动规律已不能满足实际工作需要,因此,除常用运动规律外,应简单介绍一些改进型的运动规律。
3)掌握在确定凸轮机构的基本尺寸时应考虑的主要问题(包括压力角对尺
寸的影响,压力角对凸轮受力状况、效率和自锁的影响)
4)能根据选定的凸轮类型和推杆的运动规律设计凸轮的轮廓曲线。设计时
应以解析法为主。
二、本章重点教学内容及教学难点
重点1、推杆常用运动规律的特点及其选择原则;
2、凸轮机构运动过程的分析;
3、凸轮轮廓曲线的设计;
4、凸轮机构压力角与机构基本尺寸的关系。 难点
1、凸轮机构设计的基本方法
凸轮设计的基本方法是反转法,所依据的是相对运动原理。其求解的关键是确定推杆在复合运动中其尖顶的位置。确定时应注意以下几点:
1)要注意推杆反转方向。先要明确凸轮的实际转向,然后在图上用
箭头及“-ω”标出推杆的反转方向,以避免搞错反转方向。 2)要正确确定推杆在反转运动中占据的位置。推杆反转前后两位置
线的夹角应等于凸轮的转角δ。
3)要正确确定推杆的位移s 。推杆在复合运动中,对应的位移量s
应在对应的反转位置上从基圆上开始向外量取。 2、凸轮机构的运动分析方法
反转法不仅是凸轮机构设计的基本方法,而且是凸轮机构分析常用的方法。凸轮机构分析常涉及的问题,如给定一凸轮机构,即已知凸轮
机构的尺寸及其位置、凸轮角速度大小及方向,求解推程角0δ、远休止
角01δ、回程角0
δ'、近休止角02δ以及推杆行程h ;或求解当凸轮转过某一个δ角时,推杆所产生的相应位移s 、速度v 等运动参数及凸轮与从动
件在该位置接触时的压力角α等。这时,如果让凸轮转过δ角后来求解,显然是很不方便的。即利用反转法求解,这实际上与凸轮设计的反转法原理相同。
三、教学过程思路 (一)、凸轮机构的应用与分类
1、先举几个凸轮机构应用的例子,并用动画指出什么是凸轮机构,说明凸轮机构是
由凸轮、从动杆和机架三个构件组成的高副机构。然后与连杆机构比较,说明凸轮机构结构简单紧凑,设计容易,且能实现复杂的运动规律,但因凸轮与推杆之间是点线接触,故在受力不大的控制机构中得到广泛应用。
2、在讲述按凸轮形状分类时,应指出:
盘形凸轮、移动凸轮、圆柱凸轮机构的运动特点及其内在联系(即移动凸轮可看作回转轴心在无穷远的盘形凸轮机构,而把移动凸轮卷成一圆筒则为圆柱凸轮)
讲述推杆型式分类时,应说明尖顶推杆虽然容易磨损,在生产实际中很少应用,但可把尖顶作为中心,加一圆滚子,即得到滚子推杆,并由此说明理论廓线与实际廓线的概念,同时说明尖顶推杆凸轮机构的设计是其它形式的凸轮机构的设计基础。
应该说明各种推杆的运动形式既可以是往复直线运动,也可以是往复摆动。直动推杆还可以是对心式的或偏置式,由此将不同形式的推杆和不同形式的凸轮组合起来就可以得到各种不同类型的凸轮机构。这样讲述,不仅可以使学生了解不同形式的凸轮机构应用的场合,还可使学生掌握各种凸轮机构命名的一般规律。
保持推杆与凸轮始终接触的方法分类,只需作简单介绍,但应使学生知道等宽、等径和共轭凸轮机构等。
(二)推杆运动规律及其特性
1、在讲述推杆运动规律之前,应该讲清楚凸轮机构中有关的名词和术语,务必使学生建立起推杆与凸轮之间的相对运动关系,明确推杆位移与凸轮转角或时间之间的坐标关系。
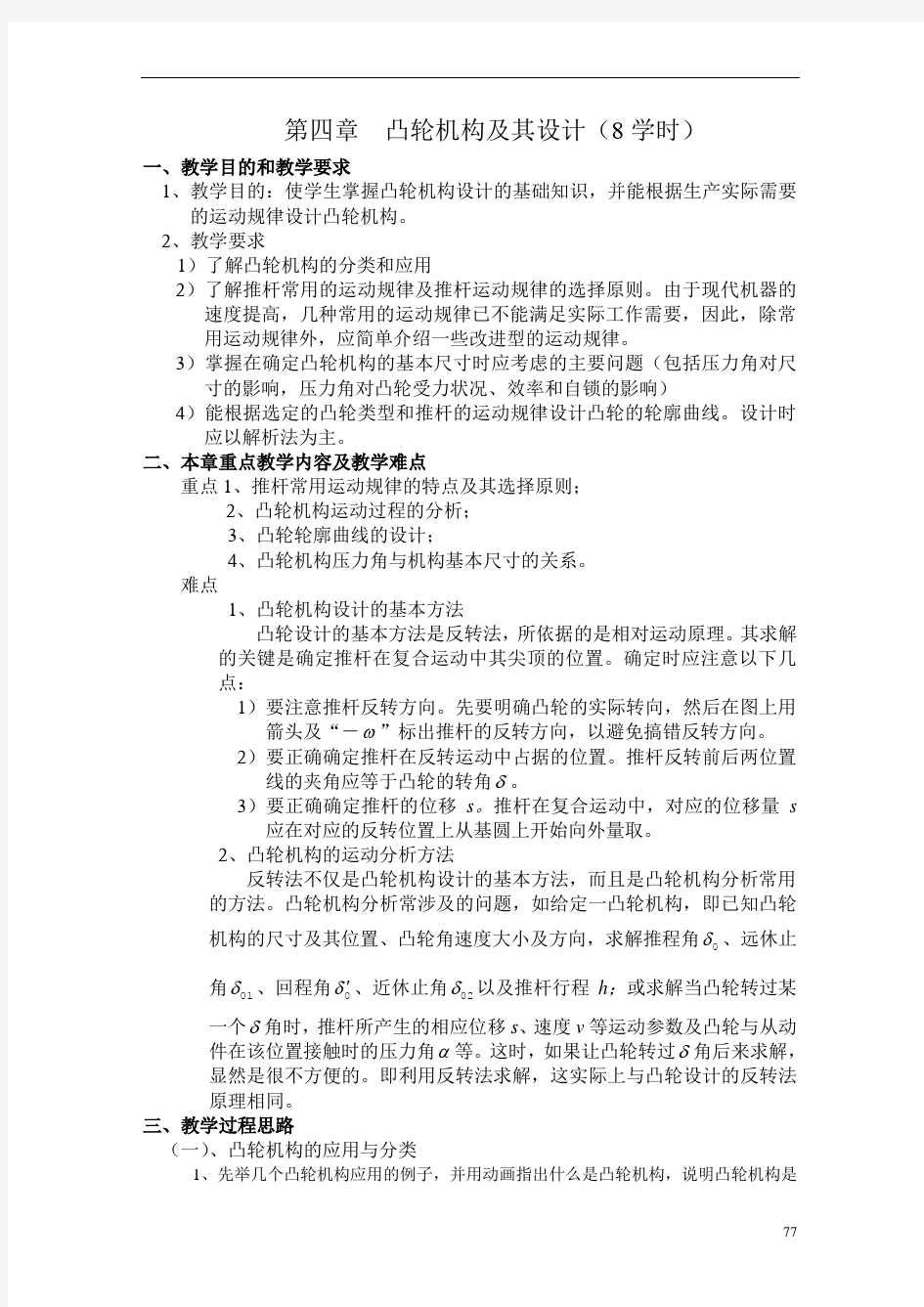
2、推杆的运动规律是指推杆在运动过程中,其位移s 、速度v 、加速度a 随时间t 的变化规律。由于凸轮一般以等角速度ω转动,故其转角?与时间t 成正比。所以推杆运动规律更常表示为凸轮转角?的关系。
对心直动尖顶推杆盘形凸轮机构
对于推杆的运动规律,着重掌握以下三点: (1)、常用的四种运动规律的位移、速度及加速度线图,以及曲线变化情况; (2)、各运动规律的特点,如max v 及max a 值的大小,哪些运动规律存在刚性冲击,哪些运动规律存在柔性冲击,以及它们发生的位置等;
(3)、各运动规律适用的场合,并初步掌握运动规律选择的原则。
3、最后简要介绍一下改进型运动规律。只需介绍改进型运动规律一般可通过采用多种运动规律的组合和采用多项式运动规律来得到,特别是多项式运动规律有多次连续求导后仍是连续函数的特点。因此,高速凸轮机构最宜采用这种运动规律,然后可介绍其运动方程的建立方法。
(三)、凸轮轮廓曲线的设计
1、由于凸轮机构的类型多,内容复杂,讲授时要注意突出重点,考虑以下几方面: 第一、应以滚子推杆盘形凸轮机构和平底推杆盘形凸轮机构为主,讲深讲透。
第二、滚子推杆盘形凸轮机构有直动杆和摆动杆两种,在生产实际中应用较多,因此都要讲到。但因其轮廓曲线设计方法是相同的,故应着重讲授直动推杆盘形凸轮轮廓曲线设计。 第三、滚子直动推杆盘形凸轮机构的推杆有对心和偏心之分,且凸轮与推杆相对位置的布局及凸轮的转向也有不同,讲授时有所交待,实际上是偏心的特例。
第四、由于凸轮轮廓曲线设计的基本方法是根据“反转法”来进行的,因此,无论讲授哪种凸轮轮廓曲线,都应着重讲清楚反转法,只有学生真正掌握反转法,才能灵活应用到凸轮机构的设计中。
2、凸轮廓线设计方法的基本原理
凸轮轮廓曲线设计方法有图解法和解析法。无论用哪种方法,其所依据的原理是相同的。 凸轮廓线设计的基本方法是反转法,所依据的是相对运动原理。以对心直动尖顶推杆盘形凸轮机构为例,在设计凸轮轮廓线时,设想给整个凸轮机构以一个与凸轮角速度ω大小相等而方向相反(即ω-)的角速度,使其绕轴心O 转动。这时凸轮将静止不动,而推杆一方面随机架相对凸轮以ω角速度反转运动,另一方面又以原有的运动规律(即)(δs s =)相对于机架运动。由于推杆的尖顶始终与凸轮的轮廓保持接触,所以推杆在这种复合运动中,其尖顶的运动轨迹即为凸轮轮廓曲线。根据这一方法,求出推杆尖顶在推杆作这种复合运动中所占据的一系列位置点,并将它们连接成光滑曲线,即得所求的凸轮轮廓曲线。
凸轮轮廓线设计的反转法原理
3、用作图法设计凸轮轮廓线 (1)、对心直动尖顶推杆盘形凸轮机构凸轮轮廓线设计,用图解法设计的具体步骤如下: ① 适当选取尺寸比例尺l μ,做出基圆及推杆的初始位置;
② 根据推杆的运动规律按选定的分度值(通常在??15~1之间选取,当凸轮精度要求高时取小值)计算出推杆各分点的位移值;
③ 求出推杆在反转运动中依次占据的各个位置;
④ 反转法求出推杆尖顶在复合运动中依次占据的位置;
⑤ 将推杆尖顶的各位置点连成一条光滑曲线,即为所要设计的凸轮轮廓线。 (2)、其他类型凸轮机构的凸轮轮廓线设计特点
① 偏置直动尖顶推杆盘形凸轮机构凸轮轮廓线的设计特点为:首先根据已知的偏距e 作出偏距圆;其推杆在反转运动中依次所占据的各位置不再是过凸轮轴心的径向线,而始终是偏距圆的切线;推杆的位移则是沿着这些切线,并从基圆上开始向外量取。
② 摆动尖顶推杆盘形凸轮机构凸轮轮廓线的设计特点为:其推杆运动规律要用角位移来表达,即需将相应直动推杆的位移方程中位移s 改为角位移?,行程h 改为角行程Φ;其推杆在反转运动中的复合运动是转动加摆动,摆动推杆的回转轴心A ,将沿着以凸轮轴心O 为圆心,以A O 为半径的圆上作圆周运动。摆杆的角位移是以摆杆轴心A 的各反转位置点为顶点,以摆杆相应反转位置为起始边向外转量取一对应的摆动量。
至于滚子推杆和平底推杆盘形凸轮机构凸轮轮廓线的设计,可首先将滚子中心或推杆导路的中心线与推杆平底的交点视为尖顶推杆的尖顶,按尖顶推杆凸轮机构的设计方法,求出尖顶推杆的凸轮轮廓线,以此为理论廓线,在理论廓线上的各点作一系列滚子圆或作一系列垂直于各导路的平底,最后做出其包络线,便可求得相应的凸轮工作曲线。
4、用解析法设计凸轮轮廓线
用解析法设计凸轮轮廓线的关键是根据反转法原理建立凸轮理论廓线和工作廓线的方程式。解析法的特点是从凸轮机构的一般情况入手来建立其廓线方程的。如:对心直动推杆可看作是偏置直动推杆偏距e =0的情况;尖顶推杆可看作是滚子推杆其滚子半径为零的情况。建立凸轮轮廓线直角坐标方程的一般步骤为:
(1)、画出基圆及推杆起始位置,即可标出滚子推杆滚子中心B 的起始位置点0B ,并取直角坐标系(或极坐标系)。 (2)、根据反转法原理,求出推杆反转?角时其滚子中心B 点的坐标方程式,即为凸轮理论廓线方程式。 (3)、作理论廓线在B 点处的法线nn ,标出凸轮实际廓线上与B 对应的点B '的位置,并求出其法线倾角θ与δ的求解关系式。 (4)、求出凸轮实际廓线上B '点的坐标方程式,即为凸轮实际廓线方程式。
(四)、凸轮机构基本尺寸的确定
1、本讲要解决的问题是如何正确地选择凸轮机构地基本尺寸,讲授时要注意不要孤立地去讲各个基本尺寸如何确定,而应把它们之间地相互关系自始至终地贯穿起来,并进一步阐述在凸轮机构设计中如何全面地考虑这些因素。使学生能较全面地掌握一般凸轮机构各基本尺寸的选择问题。 (1)、在讲述时可先提出:在讲述凸轮廓线设计时,都假定凸轮的基圆半径、滚子半径等是已知的,对于平底推杆平底的确定、直动推杆导轨的长度等尺寸却未加以讨论,但是具体进行凸轮机构设计使,这些尺寸显然都是必须加以确定的。那么这些尺寸彼此之间有什么关系,在设计时应该根据什么条件和原则,考虑哪些因素,采用什么方法确定? (2)、提出:在确定凸轮机构尺寸时,首先要考虑凸轮机构中的作用力,下面就分析凸轮机构的作用力和尺寸的关系,“凸轮机构的作用力与凸轮机构的压力角”,可用一尖底直动推杆盘形凸轮机构来进行分析。 (3)、上面讲到,凸轮机构的压力角对凸轮机构受力有较大的影响,而且凸轮廓线上不同点处的压力角的大小一般也不相同,那么如何计算凸轮廓线上任一点处的压力角,压力角又取决于哪些因素呢?
2、、凸轮机构的压力角
推杆与凸轮接触点处所受正压力的方向(即凸轮轮廓线在接触点处的法线方向)与推杆上对应点速度方向所夹的锐角,并用α表示。
(1)凸轮机构压力角α与受力的关系:压力角α是影响凸轮机构受力情况的一个重要参数。当压力角α增大时,凸轮对从动件的有效分力将减小,即凸轮机构在同样载荷Q 下所需的推动力P 将增大;当压力角α接近临界压力角c α(即凸轮机构出现自锁时的压力角)时,驱动力P 急剧增加,将导致机械效率降低和轮廓严重磨损,凸轮机构处在恶劣的工作条件下;当α>c α时,凸轮机构将发生自锁。因此,从减小推力和避免自锁的观点来看,压力角愈小愈好。
一般说来,凸轮廓线上不同点处的压力角是不同的,为保证凸轮机构能正常运转,应使其最大压力角max α小于临界压力角c α。在实际生产中,为了提高机械效率和改善受力情况,通常规定了凸轮机构的最大压力角][max αα≤,][α为许用压力角,其值远小于临界压力角
c α。][α一般取值为:推程时,直动推杆?=30][α,摆动推杆[]35~45α=??;回程时,
[]'70~80α=??。
3、凸轮基圆半径的确定 (1)凸轮机构的压力角α与基圆半径的关系:如图5-1所示的偏置直动尖顶推杆盘形凸轮,由瞬心知识可知,P 点为推杆与凸轮的相对速度瞬心。故P v v OP ω==?,则有:
δωd ds v P O //==。又由图中直角三角形BCP 可知,凸轮机构的压力角α与基
圆半径0r 和偏距e 之间的关系为
00可减小压力角α,从而改善机构的传力特性;凸轮的基圆半径愈小,凸轮尺寸则愈小,凸轮机构愈紧凑。然而,基圆半径的减小受到了压力角的限制,而且在实际设计工作中,还要受到凸轮结构尺寸及强度条件的限制。因此,在实际设计工作中,基圆半径的确定必须从凸轮机构的尺寸、受力、安装、强度等方面予以综合考虑。但仅从机构尺寸紧凑和改善受力的观点来看,基圆半径0r 确定的原则是:在保证][max αα≤的条件下,应使基圆半径尽可能小。
四、例题精解
例4-1 用作图法求出图示两凸轮机构从图示位置转过45?时的压力角。
例4-1图
解:用反转法原理,从动件以ω-方向倒转?45,即为凸轮转动?45时与从动件的相对位置。
(1) 图 a) 压力角。 (2) 图 b) 压力角 。
例4-1图解
例4-2 已知一对心直动尖顶从动件盘状凸轮机构的凸轮轮廓曲线为一偏心圆,其直径 D =50 mm ,偏心距e =5 mm 。要求:
(1)画出此机构的简图(自取比例尺); (2)画出基圆并计算r 0;
(3)在从动件与凸轮接触处画出压力角α。 解:
(1) 凸轮机构如图示。
(2)0r =205250 2=-=-e D mm 。 (3) 压力角α如图示。
例4-2图解
例4-3 图示为一偏心圆盘凸轮机构,凸轮的回转方向如图所示。要求: (1)说明该机构的详细名称;
(2)在图上画出凸轮的基圆,并标明图示位置的凸轮机构压力角和从动件2的位移; (3)在图上标出从动件的行程h 及该机构的最小压力角的位置。
例4-3图 例4-3图解
解:
(1) 偏置直动滚子从动件盘形凸轮机构。 (2) r 0,α,s 如图所示。 (3) h 及αmin 发生位置如图示。
例4-4图示的凸轮为偏心圆盘。圆心为O,半径R=30mm ,偏心距OA l =10mm ,T r =10mm ,偏距e=10mm 。试求(均在图上标注出):
(1)推杆的行程h和凸轮的基圆半径0r ;
(2)推程运动角0δ、远休止角01δ、回程运动角0
δ'和近休止角02δ; (3)最大压力角max α的数值及发生的位置;
(4)从接触点B 到接触点C 凸轮所转过的角度δ和推杆的位移s ; (5)C 点接触时凸轮机构的压力角C α。
例4-4图
解:
取尺寸比例尺0.001m/mm l μ=作图,得
(1)推杆的行程20.5mm h =,基圆半径030mm r =;
(2)推程运动角0187δ=?,回程运动角0
173δ'=?,远休止角010δ=,近休止角020δ=?;
(3)当滚子与凸轮廓线在D 点接触时压力角最大,其值为max 30α=?;
(4)从接触点B 到接触点C 凸轮所转过的角度为313δ=
,推杆的位移为17mm s =; (5)在C 点接触时凸轮机构的压力角为2C α= 。
例4-4图解
例4-5 直动从动件盘形凸轮机构中,已知:行程h=40mm ,从动件运动规律如图所示,其中AB 段和CD 段均为正弦加速度运动规律。试写出从坐标原点量起的AB 和CD 段的位移方程。
例4-5图
解:
(1) 推程AB 段
)2sin(?φ
ππ?ψ
'2-
'=
h h
s AB 式中,πππφ32665=-=
,6
π
??-=' ?为从坐标原点量起的凸轮转过的角度,则
)]6
(3sin[2)6(23π?ππ?π---=h h s AB
(2) 回程CD 段
)]2sin(2[
?φππ?φ''
-''-=h h h s CD 式中,πππφ3267611=-=
',67π
??-=',则 )]6
7(3sin[2)67(23[π?ππ?π----=h h h s CD
例4-6 有一偏置直动尖顶从动件盘形凸轮机构,凸轮等速沿顺时针方向转动。当凸轮转过180
时,从动件从最低位上升16mm ,再转过?180时,从动件下降到原位置。从动件的加速度线图如图示。若凸轮角速度ω110=rad/s ,试求:
(1)画出从动件在推程阶段的v -?线图; (2)画出从动件在推程阶段的s -?线图; (3)求出从动件在推程阶段的加速度a 和max ν;
(4)该凸轮机构是否存在冲击?若存在冲击,属何种性质的冲击。
例4-6图
解:
(1) v -?线图如图示。
(2) s -?线图如图示。在3
~
0π
和
ππ
~32为2次曲线。 (3) 从动件在3~0π以等加速上升,在π3~23
π
以等速上升,在ππ~32以等减速上 升,故h h h h ==++16123 。
等加速上升段 2
222221110181042)32(421?=??==a
a a h ππω φ
等速上升段 2
2121094?=
==a
h v h π φωω φω φ122, 等减速上升段 22131018?==a
h h π,则 2
2109216?==a
h π
7295.02109162
2=??=πa m/s
2
076.01018442
21max =??==
1
1
φπω
φω
a
h v m/s
(4) 凸轮转至
π3时,位移 s 14=mm ,由23
π
至π之位移也为4mm 。在凸轮转至3π,
3
2π
时存在柔性冲击。
例4-6图解
例4-7图所示的直动平底推杆盘形凸轮机构,凸轮为R=30mm的偏心圆盘,AO=20mm,试求:
(1)基圆半径和升程;
(2)推程运动角、回程运动角、远休止角和近休止角;
(3)凸轮机构的最大压力角和最小压力角;
(4)推杆的位移s、速度 和加速度a方程;
(5)若凸轮以ω=10rad/s回转,当AO成水平位置时推杆的速度。
例4-7图例4-7图解
解:
(1)010mm r =,240mm h AO ==。
(2)推程运动角0180δ= ,回程运动角0
180δ'= ,远休止角010δ= ,近休止角020δ= 。
(3)由于平底垂直于导路的平底推杆凸轮机构的压力角恒等于零,所以
max min 0αα==
(4)如图所示,取AO 连线于水平线的夹角为凸轮的转角δ,则: 推杆的位移方程为 sin 20(1sin )s AO AO δδ=+=?+ 推杆的速度方程为 20cos υωδ=
推杆的加速度方程为 2
20
s i n a ωδ=-
(5)当10rad/s ω=,AO 处于水平位置时,0δ=
或180 ,所以推杆的速度为
2010c o s =200m υδ
=?±
例4-8 图示为一偏置直动滚子从动件盘形凸轮机构,凸轮为偏心圆盘。其直径D =42m m ,滚子半径 r r =5 mm ,偏距 e =6 mm ,试:
(1)确定基圆半径,并画出基圆; (2)画出凸轮的理论轮廓曲线; (3)求出从动件的行程 h ;
(4)确定从动件的推程运动角Φ及回程运动角Φ'; (5)说明该机构在运动中有无失真现象,为什么?
例4-8图
解:
(1) 202/r 0=-+=e r D r mm (2) 理论廓线如图示 。 (3) 22022max ,e r e s s h ---=
=ρ , 22022max max e r e s ---=ρ
322/r max =++=r e D ρ mm ,h=12.35 mm
(4)Φ)]2/()arccos[(,180max 022
max 2
0ρρr h r r r -+=+=
?=-?='?=?=385.173180,615.186,615.6r r φφ
(5)无失真现象。因凸轮廓线为一圆,处处曲率半径相等,均为R =21mm ,且r r =5mm <R ,故 无失真现象。
例4-8图解
例4-9 根据图中所示的位移曲线和有关尺寸,试用解析法求解该盘形凸轮廓线的坐标值。(仅要求计算凸轮转过?60,?150,?270时的凸轮廓线坐标值。)
例4-9图
解:
(1) 画出解题示意图。 (2) 列出解析方程式
??????+???????????
?-=????????????cos sin cos sin sin cos 00s s y x y x B B B B
由已知条件可知:x y B B 002040==,
??cos 20sin )40(++=s x B ??sin 20cos )40(-+=s y B
(3) 求解凸轮廓线坐标值 1)当?60 ?时,206012040
=???
=
=
?φ
h
s mm 96.6160cos 2060sin 60=?+?=B x mm ,68.1260sin 2060cos 60=?-?=B y mm
2)当转到150
时,s h ==40mm
x B =2268.mm , y B =-7928.mm 3)当转到270
时,10901204040=???
-='-
=?φh h s mm x B =-50 mm , y B =+20mm
例4-9图解
例4-10 如图所示凸轮机构,已知各部分尺寸,凸轮以ω1等速转动,在A 点与从动件接触转至B 点与从动件接触时,试在图上标出:
(1)凸轮转过的角度?AB 。
(2)凸轮B 点处与从动件接触的压力角α,并推导出计算该点压力角的表达式。
例4-10图 例4-10图解
解:
(1)?AB 与α如图示。 (2)tg α =OP e s s -+0= d d s e
s r e ?-+-022
例4-11 试求导摆动平底从动件盘形凸轮的廓线方程。已知凸轮基圆半径为r 0,中心距为L ,凸轮和从动件推程时的转向如图示,从动件的运动规律为)(?ψψ=。
例4-11图
解:
(1) 画出解题示意图 (2) 推导解析方程式
?
ψ?
ψd d 1d d -=
L OP
)cos()d d 1d d 1(0ψψ?
ψ?
ψ+-+
=L AB
)(cos )d d 1d d 1(02ψψ?
ψ?
ψ+-+
=L AD
设B 点坐标为x ,y ,则
)
sin()cos()d 1d d 1()
(cos )d d 1d d 1(0002ψψψψ?
ψ?
ψψψ?
ψ?
ψ++-+=+-+
-=L y L L x
例4-10图解
五、习题
5-1 填空
1.凸轮常用运动规律中,运动规律既不会产生柔性冲击也不会产生刚性冲击,可用于高速场合。
2.滚子推杆盘形凸轮的基圆半径是从到的最短距离。
3.平底垂直于导路的直动推杆盘形凸轮机构中,其压力角等于。
4.凸轮的轮廓曲线取决于。
5.平底从动件盘形凸轮机构中基圆半径应由条件来确定。
6.设计滚子推杆盘形凸轮机构时,若发现工作廓线有变尖现象,则在尺寸参数改变上应采用的措施是,。
7.在设计直动滚子推杆盘形凸轮机构的工作廓线时发现压力角超过了许用值,且廓线出现变尖现象,此时应采用的措施是。
8.设计凸轮机构时,若量得其中某点的压力角超过许用值,可以用使压力角减小。
5-2 试在图示凸轮机构中,
(1)标出从动件与凸轮从接触点C到接触点D时,该凸轮转过的转角?;
(2)标出从动件与凸轮在D点接触时的压力角α;
(3)标出在D点接触时的从动件的位移s。
题5-2图
5-3 凸轮机构中,已知从动件的速度曲线如图所示,它由4段直线组成。试求:
(1)示意画出从动件的加速度曲线;
(2)判断哪几个位置有冲击存在,是柔性冲击还是刚性冲击;
(3)在图上的F位置时,凸轮机构中有无惯性力作用?有无冲击存在。
题5-3图
r=5-4图为偏置直动尖顶推杆盘形凸轮机构,凸轮廓线为渐开线,渐开线的基圆半径
0 40mm,凸轮以ω=20rad/s逆时针旋转。试求:
(1)在B点接触时推杆的速度νB;
(2)推杆的运动规律(推程);
(3)凸轮机构在B点接触时的压力角;
(4)试分析该凸轮机构在推程开始时有无冲击?是哪种冲击?
题5-4图
-曲线(要5-5已知偏置式滚子推杆盘形凸轮机构,试用图解法求出推杆的运动规律sδ
-)与凸轮上详细对应点号位置,可不必写步骤)。
求清楚标明坐标(sδ
题5-5图
5-6图示的凸轮机构,其凸轮廓线的AB段是以C为圆心的一段圆弧。
r的表达式;
(l)写出基圆半径
(2)在图中标出图示位置时凸轮的转角δ、推杆位移s、机构的压力角α。
题5-6图
机械原理作业凸轮机构绘制
机械原理大作业-凸轮机构 专业:材料成型机控制工程学号:0284 姓名:朱富慧组号:11材卓一第2组 1.题目 (1)凸轮回转方向:顺时针 (2)从动件偏置方向:左偏置 (3)偏心距:15mm (4)基圆半径:45mm (5)从动件运动规律:先以余弦运动规律上升,再以等加速等减速运动规律下降。推程运动角150°,远休止角30°,回程运动角120°,近休止角60°。 (6)从动件行程20mm。 要求:编制程序每隔5°计算凸轮轮廓坐标并绘制凸轮轮廓曲线。 2.数学公式 记基圆半径为r0,偏心距为e,凸轮转向系数为m(顺时针时m=1,逆时针时m=-1),从动件偏置方向系数为n(左偏置时n=1,右偏置时n=-1,无偏置时n=0),推程运动角、远休止角、回程运动角、近休止角依次为p1、p2、p3、p4,从动件行程为h从动件位移为s。 则从动件位移曲线方程为 0 其中, 3.程序框图 N ③ Y N Y N 执行函数zuobiao () 执行函数zuobiao () p+5=>p p>=p 1+p 2&&p p p>=p 1&&p s 0 0=>p p>=0&&p 教学环节与主要内容具体教学目标教学活动 平底式:结构紧凑,润滑性能好,摩擦阻力小, 适用于高速。但不能与内凹的轮廓接触,因此运 动规律受到一定限制,易形成油膜,受力最平稳。 曲面式:介于滚子和平底之间 4、移动式:主动件连续回转→从动件往复直线移 动 摆动式:主动件连续回转→从动件往复摆动 5、等速运动规律:凸轮低速回转、从动件质量小 和轻载的场合。 等加速等减速运动规律:凸轮中速回转,从动件 质量不大和轻载(承载能力大于等速运动规律) 的场合。 6、等速运动规律: 刚性冲击、产生原因:加速度突变 产生位置:0°、90°、180°、270° 为了避免刚性冲击,采用修正弧法避免。 4、从动件两个运动 规律。 教师:点评 学生:讲解 课堂教学安排 等加速等减速运动规律 产生原因:加速度有限突变 产生位置:0°、90°、270°、360° 例:1)指出有刚性冲击位置的点:__________,柔性冲击位置的点:__________; (2)若改为滚子式从动件,则运动规律__________(改变,不改变); (3)在推程运动过程中,若不发生自锁,则必须有___________5、通过所学知识解答 习题。 教师:巡回指导 学生:解题 课堂教学安排 教学环节与主要内容具体教学目标教学活动 小结: 小结从动件运动规律的分析和作图。 作业: 单招练习。6、通过所学知识解答 习题。 教师:巡回指导 学生:解题 教学后记1、反思教学内容与高考的联系。本知识点在高考中多年未考,值得引起关注。 2、反思教学习题的设置。 ---精心整理,希望对您有所帮助 目录 一、设计题目 (2) 1、牛头刨床的机构运动简图 (2) 2、工作原理 (2) 二、原始数据 (3) 三、机构的设计与分析 (4) 1、齿轮机构的设计 (4) 2、凸轮机构的设计 (10) 3、导杆机构的设计 (16) 四、设计过程中用到的方法和原理 (26) 1、设计过程中用到的方法 (26) 2、设计过程中用到的原理 (26) 五、参考文献 (27) 六、小结 (28) 一、设计题目 ——牛头刨床传动机构 1、牛头刨床的机构运动简图 2、工作原理 牛头刨床是对工件进行平面切削加工的一种通用机床,其传动部分由电动机经 带传动和齿轮传动z 0—z 1 、z 1 、—z 2 ,带动曲柄2作等角速回转。刨床工作时,由导 杆机构2、3、4、5、6带动刨刀作往复运动,刨头右行时,刨刀进行切削,称为工 作行程;刨头左行时,刨刀不进行切削,称为空回行程,刨刀每切削完一次,利用 空回行程的时间,固结在曲柄O 2 轴上的凸轮7通过四杆机构8、9、10与棘轮11和棘爪12带动螺旋机构(图中未画),使工作台连同工件作一次进给运动,以便刨刀继续切削。 二、原始数据 设计数据分别见表1、表2、表3. 表1 齿轮机构设计数据 设计内容齿轮机构设计 符号n01d01 d02 z0 z1 z1’m01 m1’2n2 单位r/min mm mm mm mm r/min 方案Ⅰ1440 100 300 20 40 10 3.5 8 60 方案Ⅱ1440 100 300 16 40 13 4 10 64 方案Ⅲ1440 100 300 19 50 15 3.5 8 72 表2 凸轮机构设计数据 设计内容凸轮机构设计 符号L O2O4 L O4D φ[α]δ02 δ0 δ01δ0/ r0 r r 摆杆运动规 律单位mm mm °°°°°°mm mm 方案Ⅰ150 130 18 45 205 75 10 70 85 15 等加速等减 速 方案Ⅱ165 150 15 45 210 70 10 70 95 20 余弦加速度方案Ⅲ160 140 18 45 215 75 0 70 90 18 正弦加速度方案Ⅳ155 135 20 45 205 70 10 75 90 20 五次多项式 表3 导杆机构设计数据 设计内容导杆机构尺度综合和运动分析 符号K n2L O2A H L BC 单位r/min mm 方案Ⅰ 1.46 60 110 320 0.25L O3B 方案Ⅱ 1.39 64 90 290 0.3L O3B 方案Ⅲ 1.42 72 115 410 0.36L O3B 表4 机构位置分配表 位置号位置 组 号 学生号 A B C D 1 1 3 6 8/ 10 2 5 8 10 7/ 1/ 4 7 8 10 1 5 7/ 9 12 2 1/ 4 7 8 11 1 3 6 8/ 11 2 5 7/ 9 11 1/ 3 6 8/ 11 3 2 5 7/ 9 12 1/ 4 7 9 12 1 3 6 8/ 12 2 4 7 8 10 H a r b i n I n s t i t u t e o f T e c h n o l o g y 机械原理大作业二 课程名称:机械原理 设计题目:凸轮机构设计 院系:能源学院 班级: 1302402 设计者:黄建青 学号: 1130240222 指导教师:焦映厚陈照波 设计时间: 2015年06月23日 凸轮机构设计说明书 1. 设计题目 设计直动从动件盘形凸轮机构,机构运动简图如图1,机构的原始参数如表1所示。 图1 机构运动简图 表1 凸轮机构原始参数 计算流程框图: 2. 凸轮推杆升程,回程运动方程及推杆位移、速度、加速度线图 2.1 确定凸轮机构推杆升程、回程运动方程 设定角速度为ω=1 rad/s (1) 升程:0°<φ<50° 由公式可得 )]cos(1[20 ?π Φh s -= )sin( 20 1 ?π ωπΦΦh v = )cos(20 2 2 12?π ωπΦΦh a = (2) 远休止:50°<φ<150° 由公式可得 s = 45 v = 0 a = 0 (3) 回程:150°<φ<240° 由公式得: ()()22 0000200000002200000 0,2(1)(1)1,12(1)(1),2(1)s s s s s s s s s Φhn s h ΦΦΦΦΦΦn Φn ΦΦn h n s h ΦΦΦΦΦΦn Φn n ΦΦΦn hn s ΦΦΦΦΦn Φn ??????'?=---+<≤++?'-? ???''-? =----++ <≤++???'-??? ?'---?'=-++<≤++'-?? 201 00000010002001 000 00n (),(1)(1)n ,(1)(1)n (1),(1)s s s s s s s s Φh v ΦΦΦΦΦΦn Φn ΦΦn h v ΦΦΦΦn Φn n ΦΦΦn h v ΦΦΦΦΦn ΦΦn ω??ω??ω??'=- --+<≤++?'-? ?''-? =- ++<≤++?'-? ?'---'?=--++<≤++''-?? 机械原理课程设计 说明书 题目:双联凸轮写“C”机构 学院:xxxxxxxxxxxxxxxxx 班级:xxxxxxxxxxxxx 姓名:xxxxxxxxxxx 学号:xxxxxxxxxxxxx 指导教师:xxxxxxxxx 2015年1月23日 一.设计任务…………………………………………二.原始数据设计及设计要求………………………三.设计方案分析……………………………………四.设计内容…………………………………………五.设计小结…………………………………………六.参考文献………………………………………… 一.设计任务 设计能写出英文字母C的凸轮写字机构。且该机构由两凸轮连续回转的协调配合及相应的连杆,控制绘图部件画出英文字母C。 二.原始数据设计及设计要求 1. C字高60mm(y方向)。 2. C字宽45mm(x方向)。 3. 机构体积小,质量轻,工作可靠,启动或停顿时冲击小。 三.设计方案分析 1. 方案一:两对心直动尖顶推杆盘形凸轮写字机构。 尖顶推杆虽然构造简单,但易磨损,且启动或停顿时冲击大。 2. 方案二:两对心直动滚子推杆盘形凸轮写字机构。 滚子与凸轮间为滚动摩擦,磨损小,传动精度高,冲击小。 3. 方案选择:通过对上述两种方案分析比较,选用方案二。 四、设计内容 目标C曲线 通过作图工具,得到想要的C曲线如下图所示 该“C”曲线为一段半径是30mm的圆弧的一部分。由于双联凸轮机构的特性,作出的曲线应为封闭图形。所以要用一条线段将“C”的首尾相连,即得到如图所示的曲线。 数据处理 通过建立如图所示的坐标系,得到X的相对偏移量和X=X(Φ)和Y的相对偏移量和Y=Y(Φ)。并建立如下的表格。 Harbin Institute of Technology 机械原理大作业二 课程名称:机械原理 设计题目:凸轮机构设计 姓名:李清蔚 学号:1140810304 班级:1408103 指导教师:林琳 一.设计题目 设计直动从动件盘形凸轮机构,其原始参数见表 1 表一:凸轮机构原始参数 升程(mm ) 升程 运动 角(o) 升程 运动 规律 升程 许用 压力 角(o) 回程 运动 角(o) 回程 运动 规律 回程 许用 压力 角(o) 远休 止角 (o) 近休 止角 (o) 40 90 等加 等减 速30 50 4-5-6- 7多 项式 60 100 120 二.凸轮推杆运动规律 (1)推程运动规律(等加速等减速运动) 推程F0=90° ①位移方程如下: ②速度方程如下: ③加速度方程如下: (2)回程运动规律(4-5-6-7多项式) 回程0 0240 190≤ ≤?,F0=90°,F s=100°,F0’=50°其中回程过程的位移方程,速度方程,加速度方程如下: 三.运动线图及凸轮s d ds -φ 线图 本题目采用Matlab 编程,写出凸轮每一段的运动方程,运用Matlab 模拟将凸轮的运动曲线以及凸轮形状表现出来。代码见报告的结尾。 1、程序流程框图 开始 输入凸轮推程回程的运动方程 输入凸轮基圆偏距等基本参数 输出ds,dv,da 图像 输出压力角、曲率半径图像 输出凸轮的构件形状 结束 2、运动规律ds图像如下: 速度规律dv图像如下: 加速度da规律如下图: 3.凸轮的基圆半径和偏距 以ds/dfψ-s图为基础,可分别作出三条限制线(推程许用压力角的切界限D t d t,回程许用压力角的限制线D t'd t',起始点压力角许用线B0d''),以这三条线可确定最小基圆半径及所对应的偏距e,在其下方选择一合适点,即可满足压力角的限制条件。 得图如下:得最小基圆对应的坐标位置O点坐标大约为(13,-50)经计算取偏距e=13mm,r0=51.67mm. 第六讲凸轮机构及其设计 (一)凸轮机构的应用和分类 一、凸轮机构 1.组成:凸轮,推杆,机架。 2.优点:只要适当地设计出凸轮的轮廓曲线,就可以使推杆得到各种预期的运动规律,而且机构简单紧凑。缺点:凸轮廓线与推杆之间为点、线接触,易磨损,所以凸轮机构多用在传力不大的场合。 二、凸轮机构的分类 1.按凸轮的形状分:盘形凸轮圆柱凸轮 2.按推杆的形状分 尖顶推杆:结构简单,能与复杂的凸轮轮廓保持接触,实现任意预期运动。易遭磨损,只适用于作用力不大和速度较低的场合 滚子推杆:滚动摩擦力小,承载力大,可用于传递较大的动力。不能与凹槽的凸轮轮廓时时处处保持接触。 平底推杆:不考虑摩擦时,凸轮对推杆的作用力与从动件平底垂直,受力平稳;易形成油膜,润滑好;效率高。不能与凹槽的凸轮轮廓时时处处保持接触。 3.按从动件的运动形式分(1)往复直线运动:直动推杆,又有对心和偏心式两种。(2)往复摆动运动:摆动推杆,也有对心和偏心式两种。 4.根据凸轮与推杆接触方法不同分: (1)力封闭的凸轮机构:通过其它外力(如重力,弹性力)使推杆始终与凸轮保持接触,(2)几何形状封闭的凸轮机构:利用凸轮或推杆的特殊几何结构使凸轮与推杆始终保持接触。①等宽凸轮机构②等径凸轮机构③共轭凸轮 (二)推杆的运动规律 一、基本名词:以凸轮的回转轴心O为圆心,以凸轮的最小半径r0为半径所作的圆称为凸轮的基圆,r0称为基圆半径。推程:当凸轮以角速度转动时,推杆被推到距凸轮转动中心最远的位置的过程称为推程。推杆上升的最大距离称为推杆的行程,相应的凸轮转角称为推程运动角。回程:推杆由最远位置回到起始位置的过程称为回程,对应的凸轮转角称为回程运动角。休止:推杆处于静止不动的阶段。推杆在最远处静止不动,对应的凸轮转角称为远休止角;推杆在最近处静止不动,对应的凸轮转角称为近休止角 二、推杆常用的运动规律 1.刚性冲击:推杆在运动开始和终止时,速度突变,加速度在理论上将出现瞬时的无穷大值,致使推杆产生非常大的惯性力,因而使凸轮受到极大冲击,这种冲击叫刚性冲击。 2.柔性冲击:加速度有突变,因而推杆的惯性力也将有突变,不过这一突变为有限值,因而引起有限 机械原理大作业(二) 作业名称:机械原理 设计题目:凸轮机构 班级: 设计者: 学号: 指导教师: 设计时间: 哈尔滨工业大学机械设计 1. 设计题目 (1) 凸轮机构运动简图: 2.凸轮推杆升程,回程运动方程及推杆位移,速度,加速度线图 (1) 推杆升程,回程运动方程如下: A.推杆升程方程: 设为ω1rad/s )],2 3 cos(1[30)(Φ-=Φs ;3/20π≤Φ≤ )),23 sin(45)(Φ=Φv ;3/20π≤Φ≤ ),2 3 cos(2135)(Φ= Φa ;3/20π≤Φ≤ B.推杆回程方程: ],2310[ 60)(Φ-=Φπs ;3567ππ≤Φ≤ ,120)(π-=Φv ;3 5 67ππ≤Φ≤ ,0)(=Φa ;3 5 67ππ≤Φ≤ 2)推杆位移,速度,加速度线图如下: A.推杆位移线图 凸轮位移B.推杆速度线图 凸轮速度C.推杆加速度线图 凸轮速度 3.凸轮机构的错误!未找到引用源。-s线图,并依次确定凸轮的基圆半径和偏距. 1) 凸轮机构的错误!未找到引用源。-s线图: (2)确定凸轮的基圆半径和偏距: 由图知:可取错误!未找到引用源。=400 mm,e=100mm 即:基圆半径错误!未找到引用源。=错误!未找到引用源。=412.31mm 偏距e=100mm 4.滚子半径的确定及凸轮理论轮廓和实际轮廓的绘制. 可取滚子半径r=60mm,则凸轮理论轮廓和实际轮廓如下: (1) 程序如下 fai01=2*pi/3; fai02=pi/2; fais1=pi/2; fais2=5*pi/9; h=60; fai1=0:0.001*pi:2*pi/3; fai2=2*pi/3:0.001*pi:7*pi/6; fai3=7*pi/6:0.001*pi:5*pi/3; fai4=5*pi/3:0.001*pi:2*pi; s1=h/2*(1-cos(pi*fai1/fai01)); s2=h+fai2*0; s3=h*(1-(fai3-(fai01+fais1))/fai02); s4=fai4*0; plot(fai1,s1,fai2,s2,fai3,s3,fai4,s4) v1=pi*h/(2*fai01)*sin(pi*fai1/fai01); v2=0*fai2; v3=-h/fai02; v4=0*fai4; plot(fai1,v1,fai2,v2,fai3,v3,fai4,v4) a1=2*pi*h/fai01.^2*cos(pi*fai1/fai01); a2=0*fai2; 机械原理大作业二 课程名称:机械原理 设计题目:凸轮设计 院系:机电学院 班级:1208103 完成者:xxxxxxx 学号:11208103xx 指导教师:林琳 设计时间:2014.5.2 工业大学 凸轮设计 、设计题目 如图所示直动从动件盘形凸轮,其原始参数见表,据此设计该凸轮 二、凸轮推杆升程、回程运动方程及其线图 1 、凸轮推杆升程运动方程(0 5) 6 升程采用正弦加速度运动规律,故将已知条件h 50mm ,05带入正弦 6 加速度运动规律的升程段方程式中得: 6 1 12 S 50 sin ; 5 2 5 cos 5 144 12 12 a sin 5 2、凸轮推杆推程远休止角运动方程( 5 ) 6 s h 50mm ; v a 0 ; 3、凸轮推杆回程运动方程( 14 ) 9 回程采用余弦加速度运动规律,故将已知条件 h 50mm , '0 5 9 6 带入余弦加速度运动规律的回程段方程式中得: 14 4、凸轮推杆回程近休止角运动方程( 14 2 ) 9 s v a 0; 5、凸轮推杆位移、速度、加速度线图 根据以上所列的运动方程,利用 matlab 绘制出位移、速度、加速度线图 ①位移线图 编程如下: %用 t 代替转角 t=0:0.01:5*pi/6; s=50*((6*t)/(5*pi)-1/(2*pi)*sin(12*t/5)); hold on plot(t,s); t=5*pi/6:0.01:pi; s=50; hold on plot(t,s); t=pi:0.01:14*pi/9; s=25*(1+cos(9*(t-pi)/5)); hold on plot(t,s); t=14*pi/9:0.001:2*pi; s=0; 60 12 cos 9 ( 5 ); v 45 9 1 sin a -81 29 1 cos 25 机械原理课程设计 编程说明书 设计题目:牛头刨床凸轮机构指导教师:王琦王春华设计者:雷选龙 学号:0807100309 班级:机械08-3 2010年7月15日 辽宁工程技术大学 机械原理课程设计任务书(二) 姓名雷选龙专业机械工程及自动化班级机械08-3班学号 五、要求: 1)计算从动件位移、速度、加速度并绘制线图。 2)确定凸轮机构的基本尺寸,选取滚子半径,画出凸轮实际廓线,并按比例绘出机构运动简图。以上内容作在A2或A3图纸上。 3)编写出计算说明书。 指导教师: 开始日期:2010年07月10日完成日期:2010年07月16日 目录 一设计任务及要求-----------------------------------------------2二数学模型的建立-----------------------------------------------2三程序框图--------------------------------------------------------5四程序清单及运行结果-----------------------------------------6五设计总结-------------------------------------------------------14六参考文献-----------------------------------------------------15 一 设计任务与要求 已知摆杆9为等加速等减速运动规律,其推程运动角φ=70,远休止角φs =10,回程运动角φ?=70,摆杆长度l 09D =125,最大摆角φmax =15,许用压力角[α]=40,凸轮与曲线共轴。 (1) 要求:计算从动件位移、速度、加速度并绘制线图(用方格纸 绘制),也可做动态显示。 (2) 确定凸轮的基本尺寸,选取滚子半径,画出凸轮的实际廓线, 并按比例绘出机构运动简图。 (3) 编写计算说明书。 二 机构的数学模型 1 推程等加速区 当2/0?δ≤≤时 角位移 22max /21?δ?=m 角速度 2max /4?δ?ω= 角加速度 2max /4??ε= 2 推程等减速区 当?δ?≤<2/时 角位移 22max max /)(21?δ???--=m 角速度 2max /)(4?δ??ω-= 角加速度 2max /4??ε-= 3 远休止区 当s ??δ?+≤<时 角位移 max 1?=m 角速度 0=ω 角加速度 0=ε 4 回程等加速区 凸轮理论轮廓线与实际轮廓线数据 x y x1 y1 0 0 35 0 30 5 -3.06104 34.9879 -2.98506 29.9885 10 -6.16038 34.9373 -5.96929 29.9409 15 -9.32665 34.8075 -8.95079 29.8217 20 -12.5705 34.5372 -11.9229 29.5794 25 -15.8791 34.0528 -14.8684 29.156 30 -19.2135 33.2787 -17.756 28.4959 35 -22.5107 32.1486 -20.5396 27.5536 40 -25.6887 30.6146 -23.163 26.2995 45 -28.6546 28.6546 -25.5658 24.7228 50 -31.3147 26.2762 -27.6908 22.8313 55 -33.5852 23.5166 -29.4895 20.6488 60 -35.4018 20.4392 -30.9252 18.2121 65 -36.727 17.1261 -31.9759 15.5683 70 -37.5544 13.6687 -32.6356 12.7712 75 -37.909 10.1577 -32.9168 9.87707 80 -37.8432 6.67277 -32.8502 6.93899 85 -37.4301 3.27471 -32.4829 3.99979 90 -36.7538 9.84813e-007 -31.8734 1.08708 95 -35.8983 -3.14069 -31.0846 -1.78862 100 -34.9373 -6.16038 -30.1769 -4.6311 105 -33.9248 -9.09012 -29.2009 -7.45161 110 -32.8892 -11.9707 -28.1908 -10.2606 115 -31.7208 -14.7916 -27.1892 -12.6785 120 -30.3109 -17.5 -25.9808 -15 125 -28.6703 -20.0752 -24.5746 -17.2073 130 -26.8116 -22.4976 -22.9813 -19.2836 135 -24.7487 -24.7487 -21.2132 -21.2132 140 -22.4976 -26.8116 -19.2836 -22.9813 145 -20.0752 -28.6703 -17.2073 -24.5746 150 -17.5 -30.3109 -15 -25.9808 155 -14.7916 -31.7208 -12.6785 -27.1892 160 -11.9707 -32.8892 -10.2606 -28.1908 165 -9.05867 -33.8074 -7.76457 -28.9778 170 -6.07769 -34.4683 -5.20945 -29.5442 175 -3.05045 -34.8668 -2.61467 -29.8858 180 -1.87564e-006 -35 -1.60769e-006 -30 185 3.05045 -34.8668 2.61467 -29.8858 190 6.07768 -34.4683 5.20944 -29.5442 195 9.05866 -33.8074 7.76457 -28.9778 200 11.9707 -32.8892 10.2606 -28.1908 哈工大机械原理大作业-凸轮机构设计(第题) ————————————————————————————————作者:————————————————————————————————日期: 机械原理大作业二 课程名称:机械原理 设计题目:凸轮机构设计 院系:机电学院 班级:1208103 完成者:xxxxxxx 学号:11208103xx 指导教师:林琳 设计时间:2014.5.2 哈尔滨工业大学 凸轮机构设计 一、设计题目 如图所示直动从动件盘形凸轮机构,其原始参数见表,据此设计该凸轮机构。 序号 升程(mm ) 升程运动角(°) 升程运动规律 升程许用压力角(°) 回程运动角(°) 回程运动规律 回程许用压力角 (°) 远休止角(°) 近休止角 (°) 3 50 150 正弦加速度 30 100 余弦加速度 60 30 80 二、凸轮推杆升程、回程运动方程及其线图 1 、凸轮推杆升程运动方程(6 50π?≤ ≤) 升程采用正弦加速度运动规律,故将已知条件mm h 50=,6 50π =Φ带入正弦加速度运动规律的升程段方程式中得: ??? ?????? ??-=512sin 215650?ππ?S ; ??? ?? ???? ??-= 512cos 1601ππωv ; ω ?? ? ??= 512sin 1442 1?π ωa ; 2、凸轮推杆推程远休止角运动方程( π?π ≤≤6 5) mm h s 50==; 0==a v ; 3、凸轮推杆回程运动方程(9 14π ?π≤≤) 回程采用余弦加速度运动规律,故将已知条件mm h 50=,9 5'0π= Φ,6 s π = Φ带入余弦加速度运动规律的回程段方程式中得: ?? ? ???-+=)(59cos 125π?s ; ()π?ω--=59 sin 451v ; ()π?ω-=59 cos 81-a 21; 4、凸轮推杆回程近休止角运动方程(π?π 29 14≤≤) 0===a v s ; 5、凸轮推杆位移、速度、加速度线图 根据以上所列的运动方程,利用matlab 绘制出位移、速度、加速度线图。 ①位移线图 编程如下: %用t 代替转角 t=0:0.01:5*pi/6; s=50*((6*t)/(5*pi)-1/(2*pi)*sin(12*t/5)); hold on plot(t,s); t=5*pi/6:0.01:pi; s=50; hold on plot(t,s); t=pi:0.01:14*pi/9; s=25*(1+cos(9*(t-pi)/5)); hold on plot(t,s); t=14*pi/9:0.001:2*pi; 铰链四杆机构的基本特性和凸轮机构 一、判断题 ()1、曲柄摇杆机构的急回特性是用行程速度比系数K来表征,K值越小,急回作用越明显。 ()2、当K>1,θ>0时,机构具有急回特性。 ()3、曲柄摇杆机构以曲柄为原动件时就一定存在急回运动特性。 ()4、偏心曲柄滑块机构以曲柄为原动件时一定存在急回运动特性。 ()5、对心曲柄滑块机构无急回特性。 ()6、摆动导杆机构以曲柄为原动件时不一定存在急回运动特性。 ()7、在曲柄和连杆同时存在的平面四杆机构中,只要曲柄和连杆处于共线位置,就是曲柄的“死点”位置。 ()8、曲柄摇杆机构一定存在死点位置。 ()9、缝纫机踏板机构有时会出现踩不动或倒机的现象,这是因为死点位置造成的。 ()10、缝纫机踏板机构是利用飞轮惯性使其通过死点位置的。 ()11、曲柄摇杆机构以摇杆为原动件时存在两个死点位置。 ()12、内燃机中的曲柄滑块机构不存在死点位置。 ()13、滚子从动件凸轮机构中,从动件与凸轮之间的滚动摩擦阻力小,适于高速传动场合。 ()14、从动件的运动规律取决于凸轮轮廓的形状。 ()15、在柱体凸轮机构中,从动件可以通过直径不大的圆柱凸轮或端面凸轮获得较大的行程。 ()16、尖顶从动件易于磨损,而平底从动件磨损则较小,这是因为前者与凸轮组成高副,而后者与凸轮组成低副的原因。 ()17、凸轮机构能将原动件的旋转运动转化为从动件的往复直线运动。()18、尖顶从动件盘形凸轮机构,基圆与实际工作轮廓线相切。 ()19、凸轮机构的压力角是指凸轮轮廓线某点的法线方向与从动杆速度方向之间的夹角,一般情况下,在工作过程中它是恒定不变的。 ()20、凸轮机构中,升程一定时,基圆半径增大,压力角也随之增大。()21、移动从动件盘形凸轮机构,当从动件不动时,对应的凸轮轮廓线为一直线。 ()22、压力角影响机构的传力特性,压力角越大,传力特性越好。 二、选择题 ()1、当行程速度比系数为时,曲柄摇杆机构才有急回特性。 A. K>1 B. K<1 C. K=0 D. K<0 ()2、下列关于急回特性的描述,错误的是。 A. 机构有无急回特性取决于行程速度比系数 B. 急回特性可使空回行程的时间缩短,有利于提高生产率 C. 极位夹角值越大,机构的急回特性越显著 D. 只有曲柄摇杆机构具有急回特性 ()3、下列机构中存在急回特性的是。 A. 对心曲柄滑块机构且以曲柄为原动件 B. 偏心曲柄滑块机构且以滑块为原动件 C. 摆动导杆机构且以曲柄为原动件 D. 摆动导杆机构且以导杆为原动件 ()4、当四杆机构出现死点位置时,可在从动件上使其顺利通过。 A. 加设飞轮 B. 加大驱动力 C. 减小阻力 D. 更换原动件()5、关于缝纫机踏板机构,以下论述错误的是。 冲床冲压机构、送料机构及传动系统的设计 一、设计题目 设计冲制薄壁零件冲床的冲压机构、送料机构及其传动系统。冲床的工艺动作如图5—1a所示,上模先以比较大的速度接近坯料,然后以匀速进行拉延成型工作,此后上模继续下行将成品推出型腔,最后快速返回。上模退出下模以后,送料机构从侧面将坯料送至待加工位置,完成一个工作循环。 图1 冲床工艺动作与上模运动、受力情况 要求设计能使上模按上述运动要求加工零件的冲压机构和从侧面将坯料推送至下模上方的送料机构,以及冲床的传动系统,并绘制减速器装配图。 二、原始数据与设计要求 1.动力源是电动机,下模固定,上模作上下往复直线运动,其大致运动规律如图b)所示,具有快速下沉、等速工作进给和快速返回的特性; 2.机构应具有较好的传力性能,特别是工作段的压力角应尽可能小;传动角γ大于或等于许用传动角[γ]=40°; 3.上模到达工作段之前,送料机构已将坯料送至待加工位置(下模上方);4.生产率约每分钟70件; 5.上模的工作段长度L=30~100mm,对应曲柄转角 0=(1/3~1/2)π;上模总行程长度必须大于工作段长度的两倍以上; 6.上模在一个运动循环内的受力如图c)所示,在工作段所受的阻力F0=5000N,在其他阶段所受的阻力F1=50N; 7.行程速比系数K≥1.5; 8.送料距离H=60~250mm; 9.机器运转不均匀系数δ不超过0.05。 若对机构进行运动和动力分析,为方便起见,其所需参数值建议如下选取:1)设连杆机构中各构件均为等截面均质杆,其质心在杆长的中点,而曲柄的质心则与回转轴线重合; 2)设各构件的质量按每米40kg计算,绕质心的转动惯量按每米2kg·m2计算;3)转动滑块的质量和转动惯量忽略不计,移动滑块的质量设为36kg; 4)传动装置的等效转动惯量(以曲柄为等效构件)设为30kg·m2; 5 ) 机器运转不均匀系数δ不超过0.05。 三、传动系统方案设计 冲床传动系统如图5-2所示。电动机转速经带传动、齿轮传动降低后驱动机器主轴运转。原动机为三相交流异步电动机,其同步转速选为1500r/min,可选用如下型号: 电机型号额定功率(kw)额定转速(r/min) Y100L2—4 3.0 1420 Y112M—4 4.0 1440 Y132S—4 5.5 1440 由生产率可知主轴转速约为70r/min,若电动机暂选为Y112M—4,则传动系统总传动比约为。取带传动的传动比i b=2,则齿轮减速器的传动比i g=10.285,故可选用两级齿轮减速器。 图2 冲床传动系统 四、执行机构运动方案设计及讨论 该冲压机械包含两个执行机构,即冲压机构和送料机构。冲压机构的主动件是曲柄,从动件(执行构件)为滑块(上模),行程中有等速运动段(称工作段),并具有急回特性;机构还应有较好的动力特性。要满足这些要求,用单一的基本机构如偏置曲柄滑块机构是难以实现的。因此,需要将几个基本机构恰当地组合在一起来满足上述要求。送料机构要求作间歇送进,比较简单。实现上述要求的机构组合方案可以有许多种。下面介绍几个较为合理的方案。 机械原理大作业二 课程名称: _______ 设计题目: 凸轮机构设计 院 系: ------------------------- 班 级: _________________________ 设计者: ________________________ 学 号: _________________________ 指导教师: ______________________ 哈尔滨工业大学 Harbin I nstituteof Techndogy 设计题目 如右图所示直动从动件盘形凸轮机构,选择一组凸轮机构的原始参数, 据此设计该凸轮机构。 凸轮机构原始参数 二.凸轮推杆升程、回程运动方程及推杆位移、速度、加速度线图 凸轮推杆升程运动方程:冷3唱—亦(中] 156 12 .. v 」1 - cos()] 兀1 5 374.4 2 12 ? a 1si n( ) 兀 1 5 % t 表示转角, s 表示位移 t=0:0.01:5*pi/6; %升程阶段 s= [(6*t)/(5*pi)- 1/(2*pi)*si n(12*t/5)]*130; hold on plot(t,s); t= 5*pi/6:0.01:pi; %远休止阶段 s=130; hold on plot(t,s); t=pi:0.01:14*pi/9; %回程阶段 s=65*[1+cos(9*(t-pi)/5)]; hold on plot(t,s); t=14*pi/9:0.01:2*pi; %近休止阶段 s=0; hold on plot(t,s); grid on % t表示转角,令3 1=1 t=0:0.01:5*pi/6; %升程阶段v=156*1*[1-cos(12*t/5)]/pi hold on plot(t,v); t= 5*pi/6:0.01:pi; %远休止阶段 机械原理课程设计任务书(二) 柳柏魁专业液压传动与控制班级液压09-1 学号0907240110 五、要求: 1)计算从动件位移、速度、加速度并绘制线图。 2)确定凸轮机构的基本尺寸,选取滚子半径,画出凸轮实际廓线,并按比例绘出机构运动简图。以上容作在A2或A3图纸上。 3)编写出计算说明书。 指导教师: . . 开始日期:2011 年 6 月26 日完成日期:2011 年7 月 1 日 目录 1.设计任务及要求------------------------------ 2.数学模型的建立------------------------------ 3.程序框图--------------------------------------- 4.程序清单及运行结果------------------------ 5.设计总结--------------------------------------- 6.参考文献-------------------------------------- . . . . 1设计任务与要求 已知摆杆9为等加速等减速运动规律,其推程运动角φ=75,远休止角φs =10,回程运动角φ?=70,摆杆长度l 09D =135,最大摆角φmax =15,许用压力角[α]=42,凸轮与曲线共轴。 要求: (1) 计算从动件位移、速度、加速度并绘制线图(用方格纸绘制), 也可做动态显示。 (2) 确定凸轮的基本尺寸,选取滚子半径,画出凸轮的实际廓线, 并按比例绘出机构运动简图。 (3) 编写计算说明书。 2数学模型 (1) 推程等加速区 当2/0?δ≤≤时 22max /21?δ?=m (角位移) 2max /4?δ?ω=(角速度) 2max /4??ε=(角加速度) (2) 推程等减速区 机械原理课程设计——凸轮机构设计(一) 目录 (1) _________________________(一)、题目及原始数据 (2) (二)、推杆运动规律及凸轮廓线方程 (3) (三)、计算程序方框图 (5) (四)、计算源程序 (6) (五)、程序计算结果及分析 (10) (六)、凸轮机构图 (15) (七)、心得体会 (16) (八)、参考书 (16) (一)、题目及原始数据 试用计算机辅助设计完成偏置直动滚子推杆盘形凸轮机构的设计,凸轮以 1rad/s的角速度沿逆时针方向转动。要求: (1)、推程运动规律为等加速等减速运动,回程运动规律为五次多项式运动规律; (2)、打印出原始数据; (3)、打印出理论轮廓和实际轮廓的坐标值; (4)、打印出推程和回程的最大压力角,以及出现最大压力角时凸轮的相应转角; (5)、打印出凸轮实际轮廓曲线的最小曲率半径,以及相应的凸轮转角; (6)、打印出凸轮运动的位移; (7)、打印最后所确定的凸轮的基圆半径。 原始数据如下: r0=0.015; 初选的基圆半径r0 Deltar0=0.0005; 当许用压力角或许用最小曲率半径不满足时,r0以Δr0 为步长增加重新计算 rr=0.010; 滚子半径r r h=0.028; 推杆行程h e=0.005; 偏距e omega=1; 原动件凸轮运动角速度,逆时针ω delta1=pi/3; 近休止角δ1 delta2=2*pi/3; 推程运动角δ2 delta3=pi/2; 远休止角δ3 delta4=pi/2; 回程运动角δ4 alpha1=pi/6; 推程许用压力角[α1] alpha2=(70/180)*pi; 回程许用压力角[α2] rho0min=0.3*rr; 许用最小曲率半径ραmin (二)、推杆运动规律及凸轮廓线方程 推杆运动规律: (1)近休阶段:0o≤δ<60 o s=0 v=0 a=0 (2)推程阶段:60o≤δ<180 o 等加速运动规律:60o≤δ<120 o s=2h(δ-60o)2/(120 o)2 v=4hω(δ-60o)/(120 o)2 a=4hω2/(120 o)2 等减速运动规律:120o≤δ<180 o 机械原理大作业二 课程名称: 设计题目: 院系: 班级: 设计者: 学号: 指导教师: 一、设计题目 图1 凸轮机构设计 升程/mm 升程运 动角/。 升程运 动规律 升程许 用压力 角/。 回程运 动角/。 回程运 动规律 回城许 用压力 角/。 远休止 角/。 近休止 角/。 65 90 等加等 减速 35 50 改进正 弦 70 100 120 二、凸轮推杆运动规律分析 1、升程运动规律(等加等减速)推程: 2、远休止运动规律 远休止: 3、回程运动规律(改进正弦加速度) 回程: 4、近休止运动规律 近休止: 三、编程及代码 1、位移、速度、加速度 t=0:0.01:pi/4; s=2*65*((2*t/pi).^2); hold on plot(t,s); t=pi/4:0.01:pi/2; s=65-2*65*(((pi/2-t)/(pi/2)).^2); hold on plot(t,s); t=pi/2:0.01:pi*19/18; s=65*ones(size(t)); hold on plot(t,s); t=19*pi/18:0.01:196.25*pi/180; s=65-65*((pi*(t-19*pi/18)/(5*pi/18))-sin(4*(pi*(t-19*pi/18)/(5*pi/18) ))/4)/(4+pi); hold on plot(t,s); t=196.25*pi/180:0.01:233.75*pi/180; s=65-65*(2+(pi*(t-19*pi/18)/(5*pi/18))-9*sin(pi/3+4*(pi*(t-19*pi/18)/ (15*pi/18)))/4)/(4+pi); hold on plot(t,s); t=233.75*pi/180:0.01:24*pi/18; s=65-65*(4+(pi*(t-19*pi/18)/(5*pi/18))-sin(4*(pi*(t-19*pi/18)/(5*pi/1 8)))/4)/(4+pi); hold on plot(t,s) 第三章凸轮机构 题3-1欲设计图示的直动滚子从动件盘形凸轮机构,要求在凸轮转角为00~900时,推杆以余弦加速度运动规律上升h= 20 mm,且取r0= 25 mm,e= 10 mm,r r= 5 mm。试求: (1)选定凸轮的转向ω,并简要说明选定的原因; (2)用反转法画出当凸轮转角φ=00~900时凸轮的工作廓线(画图的分度要求小于150); (3)在图上标注出φ1=450时凸轮机构的压力角α。 解答: 1.选位移比例尺 m/m m 001 .0 = S μ ,转角比例尺 /mm 04 .0弧度 = ? μ ,绘制从动件 位移曲线,见题解3-1图 (a)。 2. 逆时针方向,使凸轮机构为正偏置,减小推程段凸轮机构的压力角。 3.将圆弧顶推杆视为滚子推杆,取尺寸比例尺 m/m m 001 .0 = l μ 作图,凸轮廓线如图 所示。 4.如图所示,当φ1=450时,α=14.50。 题3-1图 (a)(b) 题3-2 图示为一摆动平底推杆盘形凸轮机构( 001.0=l μm/mm ),已知凸轮的 轮廓是一个偏心圆,其圆心为C ,试用图解法求: (1)凸轮从初始位置到达图示位置时转角φ0及推杆的角位移ψ0; (2)推杆的最大角位移ψmax 及凸轮的推程运动角Φ; (3)凸轮从初始位置回转900 时,推杆的角位移ψ90。 解题分析:作推杆的摆动中心所在的圆η→作基圆→作推杆的初始位置→按题目要求逐步求解。 解答: 1.求φ0及ψ0 (1)以O 为圆心,OA 长为半径作圆η;以O 为圆心作圆切于凸轮,该圆即为基圆;作推杆与基圆和凸轮同时相切,得切点B 0,A 0B 0即为推杆的初始位置。 (2)凸轮从初始位置到达图示位置时的转角就是A 0O 沿-ω方向转到AO 时的角度,即 φ0=330,推杆的角位移ψ0=20。 题3-2图 题解3-2图机械基础凸轮机构教案-参考模板
机械原理课程设计,详细
哈工大机械原理大作业凸轮 - 黄建青
机械原理凸轮设计C
哈工大机械原理大作业凸轮机构第四题
机械原理 凸轮机构及其设计
哈工大机械原理大作业——凸轮——22号
哈工大机械原理大作业_凸轮机构设计(第3题)
机械原理课程设计报告凸轮设计
机械原理课程设计——内燃机设计——凸轮轮廓线程序、图像
哈工大机械原理大作业凸轮机构设计第题
机械基础 常用机构 习题
机械原理课程设计说明书(凸轮送料机构)
哈工大机械原理大作业凸轮
机械原理课程设计 牛头刨床凸轮机构
机械原理 凸轮机构设计
机械原理大作业凸轮剖析
机械基础答案