天津大学 控制系统设计与仿真 课程设计报告(一)

控制系统课程设计 任务1
1.了解MATLAB 的使用环境,掌握基本的MATLAB 编程语法和语句(略)
2.了解Simulink 的使用环境,掌握Simulink 的模块化编程步骤(略)
3.对所有过程控制系统对象进行分析,分析所有参数的变化情况
工业生产过程可分为自衡过程和非自衡过程,每种又可分为单容过程、多容过程、滞后过程。在此针对几种典型过程进行分析。 单容自衡:1
)(000+=s T K s G 单容自衡带纯滞后:s e s T K s G 01)(000τ-+=
单容非自衡:s T s G a 1)(0=
双容自衡:)
1)(1()(2100++=s T s T K s G 双容自衡带纯滞后:s e s T s T K s G 0)
1)(1()(2100τ-++= 双容非自衡:)
1()(00+=Ts s T K s G a 下面采用阶跃响应曲线法,利用Simulink 仿真分析参数变化对系统输出特性的影响。这里仅分析单容自衡带纯滞后、双容自衡两个典型过程。
(1)单容自衡带纯滞后
取被控过程的比例系数K0=1,时间常数T0依次取10s ,20s ,40s ,80s ,纯滞后时间t0=0。可以看出,在相同的阶跃输入作用下,时间常数越大,系统达到稳态所需的时间越长。
图1 不同时间常数被控对象建模
图2 不同时间常数被控对象阶跃响应曲线
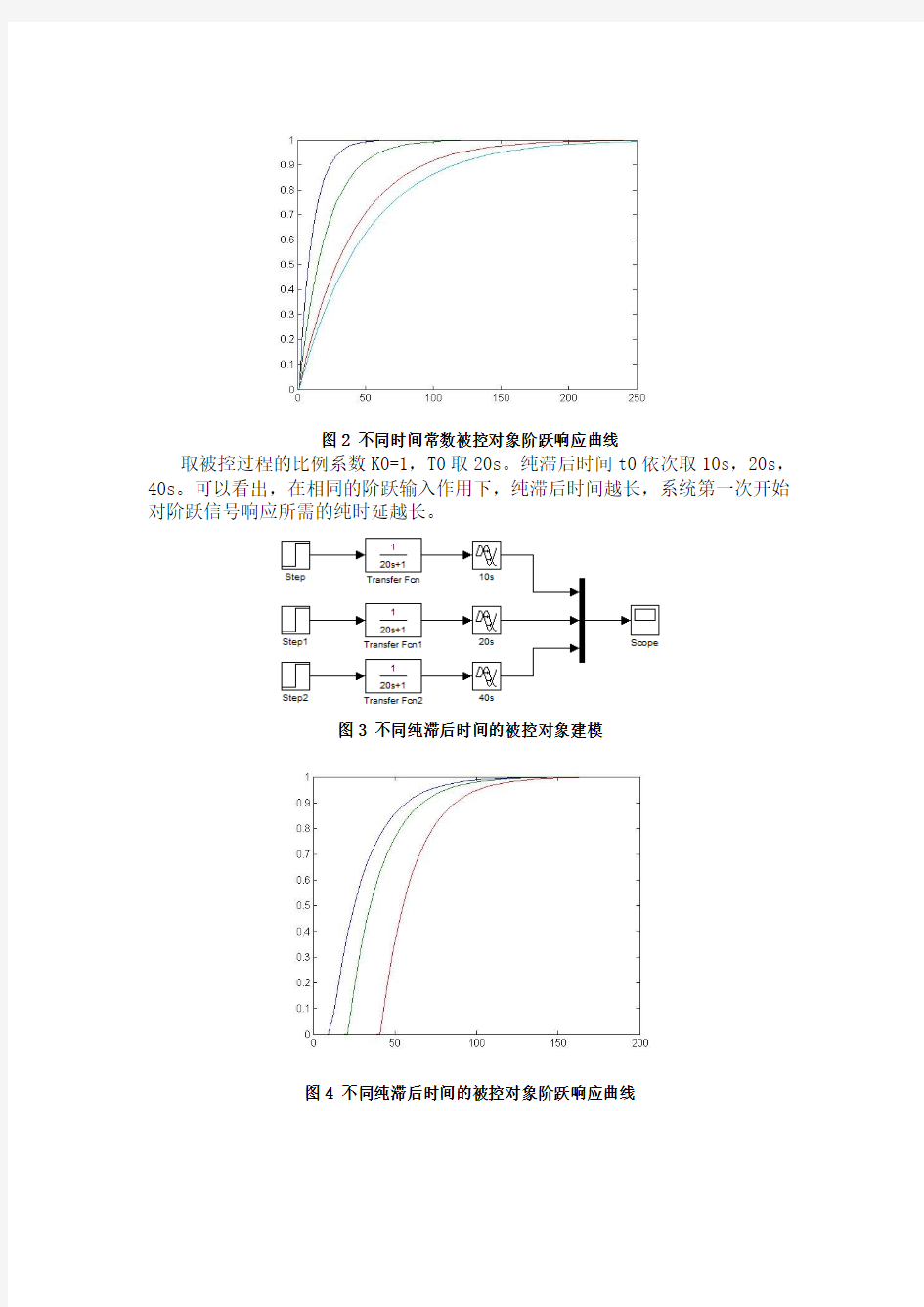
取被控过程的比例系数K0=1,T0取20s。纯滞后时间t0依次取10s,20s,40s。可以看出,在相同的阶跃输入作用下,纯滞后时间越长,系统第一次开始对阶跃信号响应所需的纯时延越长。
图3 不同纯滞后时间的被控对象建模
图4 不同纯滞后时间的被控对象阶跃响应曲线
取被控过程的时间常数T0=20s,纯滞后时间t0=10s,比例系数K0依次取1,5,10,20。可以看出,在相同的阶跃输入作用下,系统输出达到稳态的值与比例系数成正比。
图5 不同开环增益被控对象建模
图6 不同开环增益被控对象阶跃响应曲线
(2)双容过程
取被控过程的时间常数T2=20s,T1依次取10s,20s,30s,40s。可以看出,在相同的阶跃输入作用下,时间常数越大,系统达到稳态所需的时间越长。
图7 不同时间常数双容对象建模
图8 不同时间常数双容对象阶跃响应曲线
取被控过程的时间常数依次为T1=10s,12s,15s,20s,T2=60s,50s,40s,30s,以保证系统的自然频率wn相同。可以看出,在相同的阶跃输入作用下,两个时间常数越接近,系统的响应速度越快。这是因为相近的时间常数对应系统的阻尼比更小,系统会更快地达到平衡状态。
图9 不同阻尼比双容对象建模
图10 不同阻尼比双容对象阶跃响应曲线
4.对单回路控制系统的四个部分进行详细仿真
(1)测量变送环节
调整变送器的比例系数,可以看出,系统输出与变送器的比例系数成反比。
图11 不同反馈增益的闭环系统结构图
图12 不同反馈增益的闭环系统单位阶跃响应
(2)被控对象
分别取不同惯性时间常数的被控对象,并将系统闭环,施加相同的单位阶跃响应,可以看出时间常数小的系统响应速度较快。需要说明的是,图像中的超调量和调节时间与PID参数整定结果有关,并不能完全反映被控对象本身的特性。
图13 不同对象惯性时间常数的闭环系统结构图
图14 不同对象惯性时间常数的闭环系统单位阶跃响应(3)执行器
图15 不同执行器惯性时间常数的闭环系统结构图
图16 不同执行器惯性时间常数的闭环系统单位阶跃响应
由图像可以看出,时间常数较小的执行器对偏差变化的响应速度较快,并且不会产生较大的超调。
(4)控制器
这部分在下一问题中介绍。
5.深入理解PID 控制原理
比例、积分、微分控制简称PID (Propotional-Integrate-Differential )控制,它是工业生产过程中最常用的控制算法。PID 控制具有原理简单、适应性强、控制效果好的特点。理想的模拟式PID 控制算法为
])()(1)([)(0dt
t de T dt t e T t e K t u D t I p ++=? 式中Kp ——比例放大系数;
Ti ——积分时间常数;
Td ——微分时间常数。
理想PID 控制器的传递函数为
]11[)(s T s
T K s G D I p ++= 6.掌握PID 三个参数对控制系统性能的影响
(1)P 作用的输出与偏差成比例,称为比例控制作用。
特点:比例调节对系统的干扰有及时而有力的抑制作用;
比例调节存在余差,不能做无静差调节;
随着比例增益的增大,系统的稳定性变差。
(2)I 作用的输出与偏差的积分成比例,称为积分控制作用。
特点:只要被控量存在偏差,积分输出就会随时间不断增加,当偏差为零时,控 制器才会停止积分,保持一定的输出值不变;
积分控制使过渡过程的动作迟缓,动态品质变坏,过渡过程时间延长,甚至 造成系统不稳定。
(3)D 作用的输出与偏差的微分成比例,称为微分控制作用。
特点:微分作用反映系统偏差的变化率,能预见偏差变化趋势,因此能产生超前
的控制作用;
在稳态时微分部分输出为零,因此D 作用不能消除稳态误差;
微分对噪声信号有放大作用,因此过强的微分作用对系统抗扰性能不利; 对于大时滞系统,微分控制不能改善系统品质。
(2)下面以控制系统的PID 参数整定过程为例分析各参数对系统性能的影响。
图17 单回路控制系统结构图 被控过程选择一阶惯性纯滞后环节,传递函数为s e s s G 501
601)(-+=。反馈形式为单位负反馈。控制器选用模拟式PID 控制器。
1)采用P 控制,令Kp=8,10,15,得到如下单位阶跃响应曲线。可以看出,系统存在稳态误差。
图18 不同Kp 单回路系统阶跃响应曲线 取不同的Kp 值,得到以下性能指标数据:
比例系数Kp 峰值时间tp/s 超调量sigma 衰减比n 调节时间ts/s 稳态误差ess 3 -- -- -- 40.18 0.25 6 23.46 5.42% -- 25.84 0.14 10 17.09 32.98% 11.26 43.20 0.09 15 14.64 71.63% 2.26 89.07 0.06 25 系统不稳定
由以上数据对比分析可以得出以下结论:
(1)Kp 增大,峰值时间减小,系统动态响应速度加快。
(2)Kp 增大,超调量变大,系统振荡更为剧烈,稳定性变差。
(3)Kp 增大,调节时间变大,系统更不容易趋于稳态,稳定性变差。
(4)Kp 增大,稳态误差减小。
2)采用PI控制
同样选取上述被控过程进行分析。取Kp=8,分别取Ti=20s,5s,1s,系统单位阶跃响应曲线如下图所示。
图19 不同Ti单回路系统阶跃响应曲线
由图像可以看出,随着积分时间常数减小,积分作用增强,系统稳定性降低,振荡加剧,调节时间也明显变大。而积分时间常数如果太大,积分作用太小,系统需要很长的过渡过程才能消除稳态误差。
3)采用PID控制
同样选取上述被控过程进行分析。取Kp=8,Ti=5s,分别取Td=0.2s,1s,2s,系统单位阶跃响应曲线如下图所示。
图20 不同Td单回路系统阶跃响应曲线
由图像可以看出,随着微分时间常数增大,微分作用增强,系统的过渡过程变得平缓,超调量减小,调节时间也明显降低。但加入微分作用要适当,过大或过小的微分作用都会使系统的性能下降。
采用临界比例度法对系统进行PID 参数整定。把PID 控制器的积分时间Ti 置于最大,微分时间Td 置零,比例度e 置较大数值,把系统投入闭环运行,然后将调节器比例度e 由大逐渐减小,直到系统达到临界振荡。这时的比例度叫作临界比例度,针对此系统,得到临界稳定增益K=19.7,振荡的两个波峰之间的时间即为临界振荡周期Tk=19.5s 。
由经验公式,计算出PID 控制器各个参数Kp ,Ti ,Td 的值。
根据上述计算结果设置PID 控制器的参数,观察系统的响应过程,若曲线不符合要求,再适当调整整定参数值。 以下为PID 参数整定过程,最终得到PI 控制和PID 控制的最佳整定结果。 Kp Ki 峰值时间tp/s 超调量sigma 衰减比n 调节时间ts/s
8 0.125 20.03 16.54% 23.3 39.14
8.3 0.11 20.05 16.49% 24.94 38.77
7.5 0.13 21.48 14.23% 19.95 27.15
7.7 0.13 18.54 14.08% 15.71 29.20
7.7 0.16 20.78 18.47% 10.72 29.03 5 0.1 36.78 3.7% -- 44.93 5 0.125 32.45 8.3% -- 72.31
7.深入理解根轨迹法的基本原理
根轨迹(广义)是指开环系统某一参数从零变到无穷时,闭环系统特征方程的根在s 平面上变化的轨迹。根轨迹与系统的稳态性能和动态性能密切相关。
本报告通过对狭义根轨迹的系统特性进行分析,得出一般性结论。
(1)狭义根轨迹
狭义根轨迹是指开环增益K 从零变到无穷时,闭环系统特征方程的根在s 平面上变化的轨迹。
)()()()()()(1)()(1*1
11*j m
i i n i j h j i f i G p s K p s z s z s K s H s G s G s -+---=+=Φ∏∏∏∏==== 由上式可知,闭环系统根轨迹增益等于开环系统前向通路根轨迹增益;闭环零点由开环前向通路传递函数的零点和反馈通路传递函数的极点组成;闭环极点与开环零点、开环极点和根轨迹增益K*均有关。
令闭环系统特征方程0)()(1=+s H s G ,
经变换后得到根轨迹方程1)
()(11
*-=--∏∏==i n
i j m j p s z s K
该方程实质是一个向量方程,可用如下两个方程描述:
相角条件:,...2,1,0)12()()(1
1±±=+=-∠--∠∑∑==k k p s z s n
i i m j j π 幅值条件:j m j i n i z
s p
s K --=∏∏==11*
下面针对具体的控制系统进行根轨迹分析。
单位负反馈系统的开环传递函数)
12)(3)(1()5()(++++=
s s s s K s G ,使用MATLAB 绘制其根轨迹。
图21 开环系统1的根轨迹
由根轨迹图像可以看出,该系统不论K 取何值,根轨迹都不会穿越虚轴进入右半平面,因此系统对所有的K 值都是稳定的。当K<3.38时,闭环特征根全部位于实轴,系统表现为过阻尼,不会产生振荡。当K>3.38时,出现一对共轭的复数闭环特征根,系统表现为欠阻尼,输出表现为衰减振荡形式。 单位负反馈系统的开环传递函数)
3)(84()1()(2++++=
s s s s s K s G ,使用MATLAB 绘制其根轨迹。
图22 开环系统2的根轨迹
由根轨迹图像可以看出,系统K值增大时,根轨迹有可能穿越虚轴进入右半平面,因此系统稳定性与K值大小有关。利用rlocfind(sys)指令得到闭环系统的临界稳定根轨迹增益K=78.9。小于此K值,闭环系统稳定。
图23 开环系统2对应闭环系统在K值不同时的阶跃响应曲线对比对上述闭环系统采用不同的根轨迹增益得到的单位阶跃响应曲线图像,分别取K=1,20,40,60,可以看出,闭环系统随着K值增大而趋于振荡,稳定性变差。其原因是闭环极点越来越靠近虚轴。
(2)参数根轨迹
以非开环增益为可变参数绘制的根轨迹称为参数根轨迹。
绘制参数根轨迹的法则与绘制常规根轨迹的法则完全相同,只需在绘制参数根轨迹之前,引入等效单位反馈系统和等效传递函数的概念,把该可变参数作为等效增益进行分析。
(3)零度根轨迹
如果所研究的控制系统为非最小相位系统(系统在s右半平面具有开环零极点),对此系统绘制的根轨迹一般称为零度根轨迹。
将上述开环传递函数的零点改为z=1,传递函数变为
)
3)(84()1()(2+++-=s s s s s K s G
图24 开环系统3的根轨迹
8.掌握根轨迹的绘制方法、增益的选择、稳态误差的消除措施等
(1)根轨迹绘制8条法则
(2)稳态误差的消除措施
开环系统在坐标原点的极点数决定闭环系统的型别,因此根轨迹上的K 值根据处于原点处的极点数不则表示位置/速度/加速度误差系数。若要消除稳态误差,需根据输入信号类型的不同,选择不同型别的系统。
9.深入理解频域响应法的基本原理
控制系统中的信号可以表示为不同频率正弦信号的合成。控制系统的频率特性反映正弦信号作用下系统响应的性能。应用频率特性研究线性系统的经典方法称为频域分析法。
令传递函数)(s G 中的ωj s =,得到系统频率特性)()()(ω?ωωj e A j G =
频率特性主要有三种表示方法:Nyquist 曲线、Bode 图、Nichols 图。
10.掌握Bode 图的绘制方法、带宽频率的选择
2222)(n
n n s s s G ωζωω++=,wn=0.7,绘制zeta=0.1,0.4,1.0,1.6,2.0的Bode 图。
图25 开环系统4的频率特性
对系统带宽的要求:既要跟踪输入信号,又要抑制扰动信号。通常一个设计良好的实际运行系统,其相角裕度具有45度左右的数值。要实现此要求,开环对数幅频特性在中频区的斜率应为-20dB/dec ,同时要求中频区占据一定的频率范围,以保证在系统参数变化时,相角裕度变化不大。通常取带宽频率为输入信号最大频率的5~10倍,且使噪声频带位于带宽频率之外。
11.基于Bode 图法调整控制系统的动态和稳态性能指标方法 系统开环传递函数)
12.0)(11.0()(++=s s s K s G
图26 开环系统5的频率特性
可以看出,截止频率处的相角小于-180度,系统不稳定,且截止频率较大。采用串联滞后校正系统。 校正装置传递函数s
s s G c 4117.31)(++= 校正后系统的开环频率特性如下图所示
图27 开环系统5经校正后的频率特性
由Bode 图可以看出,系统的截止频率增加,提高了系统的动态性能,且相角裕度大大增加,提高了系统的稳态性能。
12.串级控制系统设计,与单回路比较 主对象和副对象传递函数均为s e s s G 51
601)(-+=,以模拟二阶水槽。对比分析单回路控制和串级控制系统的动态性能、稳态性能和抗扰性能。
图28 单回路控制系统结构图
经过PID 参数整定后,得控制器参数Kp=6.16,Ti=23.25s ,Td=0.006s 。系统阶跃响应曲线如下图所示。
图29 单回路控制系统单位阶跃响应
系统峰值时间tp=44.83s,超调量sigma=34.47%,调节时间ts=321.83s,稳态误差为零。
若用串级控制,主控制器采用PID控制,副控制器采用P控制,系统结构如下图所示。
图30 串级控制系统结构图
先断开主反馈回路使系统开环,并将主控制器设置为比例控制,比例系数为1,整定副控制器参数,得副控制器Kp2=7.87;然后将系统闭环,把副回路等效控制系统的一个环节,进行主控制器的PID参数整定。整定结果为Kp=2.52,
Ti=25s,Td=0.13s。控制系统的单位阶跃响应曲线如下图所示。
图31 串级控制系统单位阶跃响应
系统峰值时间tp=139.55s,超调量sigma=17.28%,调节时间ts=74.84s,稳态误差为零。由性能指标可以看出,串级系统的动态性能比单回路系统大大增强。
下面分析单回路系统和串级系统的扰动性能。
待单回路系统和串级系统稳定后(t=350s),同时分别向两个系统的主对象加入幅值为0.2,作用时间为10s的矩形脉冲扰动(一次扰动),得到两个系统输入响应曲线。
图32 单回路系统与串级系统对一次扰动的响应曲线对比
由图像可以看出,串级系统对一次扰动的抗扰能力与单回路系统相差不大,其原因是副回路对一次扰动不起作用,不能提高对一次扰动的响应频率。
待单回路系统和串级系统稳定后(t=350s),分别向两个系统的副对象加入幅值为0.2,作用时间为10s的矩形脉冲扰动(二次扰动),得到两个系统输入响应曲线。
图33 单回路系统与串级系统对二次扰动的响应曲线对比由图像可以看出,串级系统对二次扰动的抗扰能力大大加强,其原因是副回路极大的提高了对二次扰动的响应频率,副回路起粗调作用,使二次扰动很快衰减,再由主回路的PID控制进行细调,消除余差,使系统达到稳定。
综上,对串级控制系统有以下结论:品级控制系统改善了对象的动态特性,减小了被控对象的等效时间常数;大大增强了对二次扰动的克服能力;对一次扰动有较好的克服能力;对副回路参数变化具有一定的自适应能力。
13.前馈控制系统设计,与单回路比较
图34 单回路控制系统结构图
图35 静态前馈反馈控制系统结构图
如图,对主要扰动采用静态前馈补偿,静态系数Kff=Kf/K0=1,因补偿作用所以取负号,得到两个控制系统对相同的阶跃扰动信号的响应曲线,如下图所示。
图36 单回路系统与静态前馈反馈控制系统对单一扰动的响应曲线对比由图像对比可知,采用前馈补偿作用后,对单一可测不可控扰动的克服能力大大加强。上述系统实际为前馈、反馈复合控制系统,由前馈控制对可测扰动进行补偿,由反馈控制消除其他扰动带来的影响,大大提高了系统的动态和稳态性能。
前馈控制也存在着很大的局限性:完全补偿难以实现、只能克服可测不可控的扰动等,因此前馈控制不宜单独使用,往往结合反馈系统、串级系统使用。
14.其它控制系统设计,与单回路比较
在工业生产过程中广泛存在较大的纯时间滞后。纯滞后往往是由于物料或能量需要经过一个传输过程而形成的,例如本次课程设计中上水管从阀门动作到压力传感器的变化就是一个纯滞后过程(虽然纯滞后时间相比于过程的惯性时间常数很小)。衡量过程纯滞后的大小,通常采用过程纯滞后时间t和过程惯性时间常数T之比,当t/T>0.5时系统为具有大滞后的过程。对于这类过程,当输入信号作用后,因存在滞后,系统被控量没有及时响应,使得系统不能及时随被控量进行调整以克服系统的干扰作用。因此,大滞后过程控制系统会产生较大的超调
量和较长的调节时间,同时降低系统的稳定性。
在这里,我们采用预估补偿控制(Smith 预估器)对大滞后过程进行控制,并与单回路系统进行对比,分析系统性能的差异。
图37 单回路PID 控制系统结构图(系统模型未知)
图38 加入Smith 预估器的控制系统结构图 被控对象参数未知,经过若干次调整后选取Smith 预估器传递函数
s e s s G 35*1
501)(-+=,再对原系统和Smith 预估补偿系统分别进行PID 参数整定,最终得到两个系统的单位阶跃响应曲线,如下图所示。
图39 单回路系统与加入Smith 预估器的控制系统的单位阶跃响应曲线对比
由图像对比可以看出,加入Smith 预估补偿后,系统的调节时间、超调量均有所下降,系统过渡过程变得更加平稳。
系统 Kp Ti/s Td/s 上升时间
tr/s 调节时间ts/s
超调量sigma 幅值裕度 /dB 相角裕度 /度 原系统
0.98 99 0.04 73.4 417 5.92 9.5 60 Smith 预估
补偿系统 0.73 52.6 0.06 92 257 3.83 22.4 69.6
15.数字PID 控制算法的实验研究
数字PID 控制算法包括位置式PID 控制算法和增量式PID 控制算法。
对模拟PID 控制器进行离散化处理,用后向差分近似代替微分,用误差求和代替误差积分,得到数字PID 表达式(位置式PID )
)]1()([)()()(1--++=∑=k e k e K j e K k e K k u d k
j i p
由此得数字PID 控制器表达式
)1(11)()()(11---+-+==z K z
K K z E z U z D d i p 随着计算机技术的发展,各种对PID 控制算法的改进或完善更容易实现,因此出现了各种改进的数字PID 控制算法。在这里简要介绍不完全微分PID 控制算法。
PID 控制算法中的微分环节对高频干扰信号比较敏感,当控制器输入偏差信号突然变化时,微分项将很大,持续时间又很短,这样就产生了微分失控现象。不完全微分PID 算法原理为将对PID 控制输出信号起作用的低通滤波器单独放在微分项支路上,使其仅对微分项起作用。这样的结果是微分作用变化平缓,作用时间长,抗干扰作用更强。
设计PID 控制器,其传递函数为)7505.05(151)(s s
s s D +++=。 若采用不完全微分PID ,其传递函数1
57505.05)(+++=s s s s D ,采用两种PID 控制算法的相同被控对象的单位阶跃响应如下图所示,
图40 不完全微分PID 控制与普通PID 控制的单位阶跃响应曲线对比
控制系统仿真课程设计报告.
控制系统仿真课程设计 (2011级) 题目控制系统仿真课程设计学院自动化 专业自动化 班级 学号 学生姓名 指导教师王永忠/刘伟峰 完成日期2014年6月
控制系统仿真课程设计一 ———交流异步电机动态仿真 一 设计目的 1.了解交流异步电机的原理,组成及各主要单元部件的原理。 2. 设计交流异步电机动态结构系统; 3.掌握交流异步电机调速系统的调试步骤,方法及参数的整定。 二 设计及Matlab 仿真过程 异步电机工作在额定电压和额定频率下,仿真异步电机在空载启动和加载过程中的转速和电流变化过程。仿真电动机参数如下: 1.85, 2.658,0.2941,0.2898,0.2838s r s r m R R L H L H L H =Ω=Ω===, 20.1284Nm s ,2,380,50Hz p N N J n U V f =?===,此外,中间需要计算的参数如下: 21m s r L L L σ=-,r r r L T R =,22 2 s r r m t r R L R L R L +=,10N m TL =?。αβ坐标系状态方程: 其中,状态变量: 输入变量: 电磁转矩: 2p m p s r s L r d ()d n L n i i T t JL J βααωψψβ=--r m r r s r r d 1d L i t T T ααβαψψωψ=--+r m r r s r r d 1d L i t T T ββαβψψωψ=-++22s s r r m m m s r r s s 2r r r r d d i R L R L L L L i u t L T L L ααβαα σψωψ+=+-+22 s s r r m m m s r r s s 2 r r r r d d i R L R L L L L i u t L T L L ββαββ σψωψ+=--+[ ] T r r s s X i i αβαβωψψ=[ ] T s s L U u u T αβ=()p m e s s s s r n L T i i L βααβ ψψ=-
JAVA简单画板程序设计实验报告
JAVA期末画板实验报告 课程题目: 运用JAVA语言编写一个画板程序,这个画板要有画图,特殊图形绘制,颜色改变,画笔大小改变等功能。 设计思想: 1.进行界面设计 2.进行算法实现 3.运行调试 4.总结问题 设计过程: A.界面设计 新建一个Jframe容器,然后定义一个panel(Panel convas2),convas2是工具栏。用borderlayout布置容器的边框布局,将工具栏放在NORTH部分。完成界面设计。 add(canvas2,BorderLayout.NORTH); Panel canvas2 = new Panel(); 添加工具按键 Panel canvas2 = new Panel(); Button btn1 = new Button("直线"); Button btn2 = new Button("椭圆"); Button btn3 = new Button("矩形"); Button btn4 = new Button("清除"); Button btn5 = new Button("画笔"); Button btn6 = new Button("橡皮"); Choice choice = new Choice(); Choice choice1 = new Choice(); canvas2.add(choice); canvas2.add(choice1);
canvas2.add(btn1); canvas2.add(btn2); canvas2.add(btn3); canvas2.add(btn4); canvas2.add(btn5); canvas2.add(btn6); 在工具表中,有两个下拉菜单,分别收录画笔的大小和颜色。1.画笔的大小: choice1.add("1"); choice1.add("3"); choice1.add("5"); choice1.add("7"); choice1.add("9"); 2.画笔颜色 choice.add("黑色"); choice.add("蓝色"); choice.add("红色"); choice.add("黄色"); choice.add("绿色"); 3展示画板
简单画图程序-课程设计
简单画图程序-课程设计 目录 1. 基本功能描 述 ............................................................. 1 2. 设计思路 ................................................................. 1 3. 软件设 计 (3) 3.1 设计步 骤 (3) 3.2 界面设 计 (6) 3.3 关键功能的实 现 ...................................................... 7 4. 结论与心 得体会 ........................................................... 8 5. 参考文 献 ................................................................. 9 6. 思考 题 (9) 7. 附 录 ..................................................................... 9 7.1 调试报 告 (9)
7.2 测试结 果 (10) 7.3 关键源代 码 (1) 武汉理工大学《专业课程设计2(面向对象程序设计)》课程设计说明书 简单画图程序 1. 基本功能描述 1) 在菜单处的有相应的菜单项,可以选择绘制的图形形状,如直线、矩形及椭圆,可 -5可供选择,还可以选择线色以及填充色,通过弹出的颜色对话框选择以选择线宽,有1 需要的颜色,如果不选择线宽、线色以及填充色,则按默认的画笔以及画刷来绘制选择的图形。 2) 选择好图形后,通过鼠标可以绘制出相应的直线,矩形或椭圆,鼠标的按下确定图形的起点,鼠标的拖动则确定了图形的终点,即通过鼠标的拖动来决定图形的大小,鼠标弹起,此图形则绘制完毕。 3) 增添了工具栏,有相应的选择项,可以更方便地实现相应的功能。 2. 设计思路 1) 对需要用到的变量进行初始化。 2) 选择相应的图形之后就响应相应的消息处理函数,给shape赋对应的值。选择不同的线宽,线色与填充色,则改变画笔和画刷的属性。 3) 鼠标的按下响应LButtonDown(),定义起点的坐标,鼠标的拖动响应MouseMove()改变终点的坐标,鼠标的弹起响应LButtonUp(),刷新,得到绘制图形。
控制系统仿真与设计实验报告
控制系统仿真与设计实验报告 姓名: 班级: 学号: 指导老师:刘峰 7.2.2控制系统的阶跃响应 一、实验目的 1.观察学习控制系统的单位阶跃响应; 2.记录单位阶跃响应曲线; 3.掌握时间相应的一般方法; 二、实验内容 1.二阶系统G(s)=10/(s2+2s+10)
键入程序,观察并记录阶跃响应曲线;录系统的闭环根、阻尼比、无阻尼振荡频率;记录实际测去的峰值大小、峰值时间、过渡时间,并与理论值比较。 (1)实验程序如下: num=[10]; den=[1 2 10]; step(num,den); 响应曲线如下图所示: (2)再键入: damp(den); step(num,den); [y x t]=step(num,den); [y,t’] 可得实验结果如下:
记录实际测取的峰值大小、峰值时间、过渡时间,并与理论计算值值比较 实际值理论值 峰值 1.3473 1.2975
峰值时间 1.0928 1.0649 过渡时间+%5 2.4836 2.6352 +%2 3.4771 3.5136 2. 二阶系统G(s)=10/(s2+2s+10) 试验程序如下: num0=[10]; den0=[1 2 10]; step(num0,den0); hold on; num1=[10]; den1=[1 6.32 10]; step(num1,den1); hold on; num2=[10]; den2=[1 12.64 10]; step(num2,den2); 响应曲线:
(2)修改参数,分别实现w n1= (1/2)w n0和w n1= 2w n0响应曲线试验程序: num0=[10]; den0=[1 2 10]; step(num0,den0); hold on; num1=[2.5]; den1=[1 1 2.5]; step(num1,den1); hold on; num2=[40]; den2=[1 4 40]; step(num2,den2); 响应曲线如下图所示:
计算机仿真课程设计报告
、 北京理工大学珠海学院 课程设计任务书 2010 ~2011 学年第 2学期 学生姓名:林泽佳专业班级:08自动化1班指导教师:钟秋海工作部门:信息学院一、课程设计题目 : 《控制系统建模、分析、设计和仿真》 本课程设计共列出10个同等难度的设计题目,编号为:[0号题]、[1号题]、[2号题]、[3号题]、[4号题]、[5号题]、[6号题]、[7号题]、[8号题]、[9号题]。 学生必须选择与学号尾数相同的题目完成课程设计。例如,学号为8xxxxxxxxx2的学生必须选做[2号题]。 二、课程设计内容 (一)《控制系统建模、分析、设计和仿真》课题设计内容|
! " [2 有波纹控制器Dy(z)和一单位速度信号输入时的最少拍无波纹控制器Dw(z)。具体要求见(二)。 (二)《控制系统建模、分析、设计和仿真》课题设计要求及评分标准【共100分】 , 1、求被控对象传递函数G(s)的MATLAB描述。(2分) 2、求被控对象脉冲传递函数G(z)。(4分) 3、转换G(z)为零极点增益模型并按z-1形式排列。(2分) 4、确定误差脉冲传递函数Ge(z)形式,满足单位加速度信号输入时闭环稳态误差为零和实际 闭环系统稳定的要求。(6分) 5、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dy(z)可实现、最少拍和实际闭环系统稳 定的要求。(8分)
6、根据4、5、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。 (12分) 7、求针对单位加速度信号输入的最少拍有波纹控制器Dy(z)并说明Dy(z)的可实现性。 (3分) ! 8、用程序仿真方法分析加速度信号输入时闭环系统动态性能和稳态性能。(7分) 9、用图形仿真方法(Simulink)分析单位加速度信号输入时闭环系统动态性能和稳态性能。 (8分) 10、确定误差脉冲传递函数Ge(z)形式,满足单位速度信号输入时闭环稳态误差为零和实际 闭环系统稳定的要求。(6分) 11、确定闭环脉冲传递函数Gc(z)形式,满足控制器Dw(z)可实现、无波纹、最少拍和实际 闭环系统稳定的要求。(8分) 12、根据10、11、列写方程组,求解Gc(z)和Ge(z)中的待定系数并最终求解Gc(z)和Ge(z) 。 (12分) 13、求针对单位速度信号输入的最少拍无波纹控制器Dw(z)并说明Dw(z)的可实现性。(3分) 14、用程序仿真方法分析单位速度信号输入时闭环系统动态性能和稳态性能。(7分) 15、用图形仿真方法(Simulink)分析单位速度信号输入时闭环系统动态性能和稳态性能。 & (8分) 16、根据8、9、14、15、的分析,说明有波纹和无波纹的差别和物理意义。(4分) 三、进度安排 6月13至6月14:下达课程设计任务书;复习控制理论和计算机仿真知识,收集资料、熟悉仿真工具;确定设计方案和步骤。 6月14至6月16:编程练习,程序设计;仿真调试,图形仿真参数整定;总结整理设计、 仿真结果,撰写课程设计说明书。 6月16至6月17:完成程序仿真调试和图形仿真调试;完成课程设计说明书;课程设计答 辩总结。 [ 四、基本要求
java画板课程设计报告
画板 一、需求分析 平时生活中,我们会需要处理一些基本的图像,也有可能需要花一些简单的图像,平时所使用的图形处理工具有PhotoShop、Windows 画图工具等,其中PhotoShop 是一款非常强大的图形处理工具,Windows 画图工具则是一款较为简单的画图工具,功能较为简单,用Windows画图工具,是一种比较简单与具有代表性的画图工具,虽然功能不够强大,但具有大多图片处理程序所必需的基本功能:铅笔画图、各种数学函数图形、填色、取色、橡皮擦等等。这次试验中我做的就是一个仿照windows画板的程序。 功能:1.利用graphics 类来向界面上画上相应内容 2.能够画出直线,矩形,多边形,椭圆形,圆矩形等 3.能够实现橡皮,刷子,喷枪等工具。 4.能够实验颜色的设置 5.能够保存图片和打开图片(当保存名一致时需提示) 6.界面尽量合理,可以仿照windows画板界面。 二、概要设计
流程图 画板软件类图 1.工具接口Tool: 从图中可以看到,工具接口Tool 定义了鼠标动作的四个方法,分别是拖动mouseDrapped()、移动mouseMoved()、松开mouseReleased()、按下
mousePressed()、点击mouseClicked()五个动作,并用String 类型的常量属性来定义工具的类型。这个接口只有一个实现类AbstractTool,而每个工具类 都是去扩展AbstractTool 类,在图中表现为Tool1、Tool2…….ToolN。 2.Tool的实现类AbstractTool AbstractTool 是Tool 的实现类,也是一个抽像类,所以并不能被创建,只能被继承。此类实现Tool 中定义的所有方法,并扩展了其它方法,让其子类继承或者重写。该类中为其他的工具类提供了大部分的实现,那么它的子类就可以不必再做重复的实现,只关心与本类相关的逻辑, 3.AbstractTool的子类 AbstractTool 一共有ArrowTool(箭头)、PencilTool(铅笔)、BrushTool(刷子)、EraserTool(橡皮擦)、LineTool (直线)、RectTool (矩形)、PolygonTool (多边形)、RoundTool (椭圆形)、RoundRectTool(圆矩形)、AtomizerTool (喷墨)、ColorPickedTool(颜色选择)11 个子类, 4. 界面类ImageFrame 这个画图工具的界面的主要放在这个类中实现 5. 业务逻辑类ImageService 除鼠标的画图功能外(画图功能由Tool 的实现类完成),初始化画板、图片的新建打开与保存、各种面板的显示与隐藏、颜色的编辑、整个界面的刷新、菜单等业务逻辑都放在这个类中实现, 对象,它并没有保存一些状态属性。 6 .文件选择类ImageFileChooser ImageFileChooser 类继承了JFleChooser 类,JFleChooser 是Java 提供的一个简单的文件选择机制,我们这里扩展这个类,是为了增加我们自己的文件过滤器。 三、运行环境、开发语言 Window xp 和elipse Java语言
JAVA课程设计画图软件
package hh; import java.awt.*; import java.awt.event.*; import java.util.*; import javax.swing.*; import java.awt.geom.*; class Point { int x,y; Color col; int tool; int boarder; Point(int x, int y, Color col, int tool, int boarder) { this.x = x; this.y = y; this.col = col; this.tool = tool; this.boarder = boarder; } } /* *BasicStroke *Choice *validate(); **/ class paintboard extends Frame implements ActionListener, MouseMotionListener, MouseListener, ItemListener { int xx0=0,yy0=0; int xx1=0,yy1=0; int type=6; int x = -1, y = -1; int con = 1; //画笔大小 int Econ = 5; //橡皮大小 int toolFlag = 0; //toolFlag:工具标记 //toolFlag工具对应表: //(0--画笔);(1--橡皮);(2--清除);
//(3--直线);(4--圆);(5--矩形); Color c = new Color(0,0,0); //画笔颜色 BasicStroke size = new BasicStroke (con,BasicStroke.CAP_BUTT, BasicStroke.JOIN_BEVEL);//画笔粗细 Point cutflag = new Point(-1, -1, c, 6, con);//截断标志 Vector paintInfo = null;//点信息向量组 int n = 1; // *工具面板--画笔,直线,圆,矩形,多边形,橡皮,清除*/ Panel toolPanel; Button eraser, drLine,drCircle,drRect; Button clear ,pen; Choice ColChoice,SizeChoice,EraserChoice; Button colchooser; Label 颜色,大小B,大小E; paintboard(String s)//构造函数 { super(s); addMouseMotionListener(this); addMouseListener(this); paintInfo = new Vector(); /*各工具按钮及选择项*/ //颜色选择 ColChoice = new Choice(); ColChoice.add("黑色"); ColChoice.add("红色"); ColChoice.add("蓝色"); ColChoice.add("绿色"); ColChoice.addItemListener(this); //画笔大小选择 SizeChoice = new Choice(); SizeChoice.add("1"); SizeChoice.add("3"); SizeChoice.add("5"); SizeChoice.add("7"); SizeChoice.add("9"); SizeChoice.addItemListener(this); //橡皮大小选择 EraserChoice = new Choice();
课程设计之matlab仿真报告
西安邮电大学 专业课程设计报告书 院系名称:电子工程学院学生姓名:李群学号05113096 专业名称:光信息科学与技术班级:光信1103 实习时间:2014年4月8日至2014年4月 18日
一、课程设计题目: 用matlab 仿真光束的传输特性。 二、任务和要求 1、用matlab 仿真光束通过光学元件的变换。 ① 设透镜材料为k9玻璃,对1064nm 波长的折射率为1.5062,镜片中心厚度为3mm ,凸面曲 率半径,设为100mm ,初始光线距离透镜平面20mm 。用matlab 仿真近轴光线(至少10条)经过平凸透镜的焦距,与理论焦距值进行对比,得出误差大小。 ② 已知透镜的结构参数为101=r ,0.11=n ,51=d ,5163.121==' n n (K9玻璃), 502-=r ,0.12=' n ,物点A 距第一面顶点的距离为100,由A 点计算三条沿光轴夹角分别为10、20、 30的光线的成像。试用Matlab 对以上三条光线光路和近轴光线光路进行仿真,并得出实际光线的球差大小。 ③ 设半径为1mm 的平面波经凸面曲率半径为25mm ,中心厚度3mm 的平凸透镜。用matlab 仿 真平面波在透镜几何焦平面上的聚焦光斑强度分布,计算光斑半径。并与理论光斑半径值进行对比,得出误差大小。(方法:采用波动理论,利用基尔霍夫—菲涅尔衍射积分公式。) 2、用MATLAB 仿真平行光束的衍射强度分布图样。(夫朗和费矩形孔衍射、夫朗和费圆孔衍射、夫朗和费单缝和多缝衍射。) 3、用MATLAB 仿真厄米—高斯光束在真空中的传输过程。(包括三维强度分布和平面的灰度图。) 4、(补充题)查找文献,掌握各类空心光束的表达式,采用费更斯-菲涅尔原理推导各类空心光束在真空中传输的光强表达式。用matlab 对不同传输距离处的光强进行仿真。 三、理论推导部分 第一大题 (1)十条近轴光线透过透镜时,理想情况下光线汇聚透镜的焦点上,焦点到像方主平面的距离为途径的焦距F ,但由于透镜的折射率和厚度会影响光在传输过程中所走的路径(即光程差Δ)。在用MATLAB 仿真以前先计算平行光线的传输路径。,R 为透镜凸面的曲率半径,h 为入射光线的高度,θ1为入射光线与出射面法线的夹角,θ2为出射光线与法线的夹角,n 为透镜材料的折射率。设透镜的中心厚度为d ,则入射光线经过透镜的实际厚度为:L=(R-d) 光线的入射角为:sinq1=h/R 折射角度满足:sinq2=nsinq1 而实际的光束偏折角度为:θ2-θ1。 由此可以看出,当平行光线照射透镜时,在凸面之前光线平行于光轴,在凸面之后发生了偏折,于光轴交汇一点,这一点成为焦点f ,折线的斜率为(-tan(θ2-θ1))。 (2)根据题意可得,本题所讨论的是与光轴夹角不同的三条光线,经过透镜的两次反射后的成像问题。利用转面公式计算。
DDC单回路PID闭环控制系统的设计及实时仿真课程设计报告
课程设计(综合实验)报告 ( 2011-- 2012 年度第二学期) 名称:过程计算机控制系统 题目:DDC单回路PID闭环控制系统的设计及实时仿真院系:控制与计算机工程学院 班级: 学号: 学生: 指导教师:朱耀春 设计周数:一周 成绩:
日期:2012 年 6 月20 日
一、 课程设计的目的与要求 1.设计目的 在计算机控制系统课程学习的基础上,加强学生的实际动手能力,通过对DDC 直接数字闭环控制的仿真加深对课程容的理解。 2.设计要求 本次课程设计通过多人合作完成DDC 直接数字闭环控制的仿真设计,学会A/D 、D/A 转换模块的使用。通过手动编写PID 运算式掌握数字PID 控制器的设计与整定的方法,并做出模拟计算机对象飞升特性曲线,熟练掌握DDC 单回路控制程序编制及调试方法。 二、 设计正文 1.设计思想 本课程设计利用Turboc2.1开发环境,通过手动编写C 语言程序完成PID 控制器的设计,A/D 、D/A 转换,绘出PID 阶跃响应曲线与被控对象动态特性曲线。整个设计程序模块包含了PID 配置模块,PLCD-780定时采样、定时输出模块,PID 手/自动切换模块(按键控制)及绘图显示模块。 设计中,通过设定合理的PID 参数,控制PLCD-780完成模拟计算机所搭接二阶惯性环节数据的采集,并通过绘图程序获得对象阶跃响应曲线。 2. 设计步骤 (1)前期准备工作 (1.1)配备微型计算机一台,系统软件Windows 98或DOS (不使用无直接I/O 能力的NT 或XP 系统), 装Turbo C 2.0/3.0集成开发环境软件; (1.2)配备模拟计算机一台(XMN-1型), 通用数据采集控制板一块(PLCD-780型); (1.3)复习Turboc2.0并参照说明书学习PLCD-780的使用 (2) PID 的设计 (2.1)PID 的离散化 理想微分PID 算法的传递函数形式为:??? ? ??++=s T s T K s G d i p 11)( 采用向后差分法对上式进行离散,得出其差分方程形式为: u[k]=u[k-1]+q0*e[2]+q1*e[1]+q2*e[0]; 其中各项系数为: q0=kp*(1+T/Ti+Td/T); q1=-kp*(1+2*Td/T);
软件工程JAVA课程设计报告
西安科技大学 软件工程课程设计报告 题目:画图板应用程序开发 班级 学号: 姓名: 2010年12月
目录 1 绪论 (3) 2 可行性研究报告 (3) 3 需求分析报告 (4) 4 总体设计报告 (7) 5 详细设计报告 (8) 6 系统实现报告 (12) 7软件测试报告 (32) 参考文献
1、绪论 1.1 目的和意义 用过微软Windows操作系统的人一定都对Windows自带的画图板非常熟悉了。同图像处理软件界的老大Photoshop比起来,它虽然不及Photoshop的功能强大,内容丰富,但是作为Windows一直以来都内带的附件程序,它具有小巧玲珑,简单实用等其他绘图软件所不具备的优点。同时它的风格也被许多其他的绘图软件所仿效。 作为一个软件工程专业的学生自己也想亲自动手编写一个属于自己的,简单实用的绘图程序。通过本次课程设计可以增加对整个流程的熟悉以及对程序组织结构和框架的理解,对以后开发和设计更大更复杂的程序无疑有更大的帮助。 任务 书写开发文档,分析和制定整个开发过程,然后开发一个自己的画图板应用程序。 2、可行性研究报告 进行可行性研究的方法 本应用程序可行性研究是通过对比windows自带的画板程序的方式进行的,对Windows 里面的画板进行分析研究,分析得出本应用软件应该实现的基本功能,并根据自己的能力进行了功能上的增加。 评价尺度 本软件在评价时应从以下几个方面进行分析: 开发时间应尽量短; 功能实现的代码应尽量少; 代码执行效率要高; 有较强的容错能力; 技术方面的可行性 系统现阶段的发展过程中,利用现有人力和物力是完全具备的能力开发出来的,作为阶段性产品,日后的发展空间大,实现方法逐步简单容易,所以画图板应用程序在技术上是完全可行的。 a.在当前的限制条件下,该程序的功能目标能达到; b.利用现有的技术,该程序的功能可以实现; c.由于能力的不足,现阶段的功能不够完美,还可以在日后完善; d.在规定的限期内,本程序能够完成; 法律方面的可行性 本程序不会在后台扫描用户的磁盘文件; 本程序为完全免费,没有任何盈利行为,而且仅在内部流通,不予推广,所以不涉及浸犯微软版权的行为,所以本软件完全合法。 软件服务条款要与中华人民共和国的法律解释相一致,一致同意服从高等法院所有管辖。如发生软件服务条款与中华人民共和国法律相抵触时,则这些条款将完全按法律规定重新解释,而其它条款则依旧保持对用户产生法律效力和影响。 经济可行行
课程设计常用数学软件
《常用数学软件介绍》课程设计用Matlab求解下列各题,要求:抄题,写出程序、运行结果,根据要求贴上运行图。 1、求矩阵 211 020 413 A - ?? ? = ? ? - ?? 的逆矩阵1 A-及特征值和特征向量。 解: >> clear; A=[-2 1 1;0 2 0;-4 1 3]; inv(A) [V,D]=eig(A) ans = Columns 1 through 2 Column 3 -1.5000e+000 5.0000e-001 5.0000e-001 0 5.0000e-001 0 -2.0000e+000 5.0000e-001 1.0000e+000 V = Columns 1 through 2 Column 3 -7.0711e-001 -2.4254e-001 3.0151e-001 0 0 9.0453e-001 -7.0711e-001 -9.7014e-001 3.0151e-001 D = -1 0 0 0 2 0 0 0 2 2、化方阵 222 254 245 A - ?? ? =- ? ? -- ?? 为对角阵。 解:A=[2 2 -2;2 5 -4;-2 -4 5]; >> diag(diag(A)) ans = 2 0 0 0 5 0 0 0 5 3、已知 422134 305,203 153211 A B - ???? ? ? =-=-- ? ? ? ? - ???? ,在MA TLAB命令窗口中建立A、B矩阵并对
其进行以下操作: (1) 计算矩阵A 的行列式的值det()A (2) 分别计算下列各式:1122,*,.*,,,,T A B A B A B AB A B A A --- 解: (1)、 A=[4 -2 2;-3 0 5;1 5 3]; >> det(A) ans = -158 (2)、 ans = 7 -7 0 -4 0 13 0 11 5 ans = 12 10 24 7 -14 -7 -3 0 -8 ans = 4 -6 8 6 0 -15 2 -5 3 ans = -2.2204e-016 -6.6613e-016 2.0000e+000 -2.7143e+000 -8.0000e+000 -8.1429e+000 2.4286e+000 3.0000e+000 2.2857e+000 ans = 4.8734e-001 4.1139e-001 1.0000e+000 3.6709e-001 - 4.3038e-001 2.7756e-017 -1.0759e-001 2.4684e-001 1.3878e-017 ans = 24 2 4 -7 31 9 -8 13 36 ans = 4 -3 1 -2 0 5 2 5 3 4、在MA TLAB 中分别利用函数rank 、函数inv 求下列矩阵的秩: (1) 16323540,11124A -?? ?=- ? ?--?? 求 rank(A)=?
控制系统的MATLAB仿真与设计课后答案
控制系统的MATLAB 仿真与设计课后答 案
第二章 1>>x=[15 22 33 94 85 77 60] >>x(6) >>x([1 3 5]) >>x(4:end) >>x(find(x>70)) 2>>T=[1 -2 3 -4 2 -3] ; >>n=length(T); >>TT=T'; >>for k=n-1:-1:0 >>B(:,n-k)=TT.^k; >>end >>B >>test=vander(T) 3>>A=zeros(2,5); >>A(:)=-4:5 >>L=abs(A)>3 >>islogical(L) >>X=A(L) 4>>A=[4,15,-45,10,6;56,0,17,-45,0] >>find(A>=10&A<=20) 5>>p1=conv([1,0,2],conv([1,4],[1,1]));
>>p2=[1 0 1 1]; >>[q,r]=deconv(p1,p2); >>cq='商多项式为 '; cr='余多项式为 '; >>disp([cq,poly2str(q,'s')]),disp([cr,poly2str(r,'s')]) 6>>A=[11 12 13;14 15 16;17 18 19]; >>PA=poly(A) >>PPA=poly2str(PA,'s') 第三章 1>>n=(-10:10)'; >>y=abs(n); >>plot(n,y,'r.','MarkerSize',20) >>axis equal >>grid on >>xlabel('n') 2>>x=0:pi/100:2*pi; >>y=2*exp(-0.5*x).*sin(2*pi*x); >>plot(x,y),grid on; 3>>t=0:pi/50:2*pi; >>x=8*cos(t); >>y=4*sqrt(2)*sin(t); >>z=-4*sqrt(2)*sin(t); >>plot3(x,y,z,'p');
基于Simulink仿真双闭环系统综合课程设计报告书
课程设计 双闭环直流调速系统设计及仿真验证 学院年级:工程学院08级 组长:陈春明学号200830460102 08自动化1班成员一:陈木生学号 200830460103 08自动化1班 指导老师: 日期: 2012-2-28 华南农业大学工程学院
摘要 转速、电流双闭环调速系统是应用最广的直流调速系统,由于其静态性能良好,动态响应快,抗干扰能力强,因而在工程设计中被广泛地采用。现在直流调速理论发展得比较成熟,但要真正设计好一个双闭环调速系统并应用于工程设计却有一定的难度。 Matlab是一高性能的技术计算语言,具有强大的科学数据可视化能力,其中Simulink具有模块组态简单、性能分析直观的优点,方便了系统的动态模型分析。应用Simulink来研究双闭环调速系统,可以清楚地观察每个时刻的响应曲线,所以可以通过调整系统的参数来得出较为满意的波形,即良好的性能指标,这给分析双闭环调速系统的动态模型带来很大的方便。 本研究采用工程设计方法,并利用Matlab协助分析双闭环调速系统,依据自动控制系统快、准、稳的设计要求,重点分析系统的起动过程。 关键词:双闭环直流调速 Simulink 自动控制
目录 1、直流电机双闭环调速系统的结构分析....................... 1.1 双闭环调速系统的组成............................... 1.2 双闭环调速系统的结构.................................... 2 、建立直流电机双闭环调速系统的模型............................ 2.1 小型直流调速系统的指标及参数......................... 2.2 电流环设计............................................... 2.3 转速环设计................................................ 3、直流电动机双闭环调速系统的MATLAB仿真.................... 3.1 系统框图的搭建............................................. 3.2 PI控制器参数的设置...................................... 3.3 仿真结果.................................................... 4、结论与总结....................................................... 5、参考资料.......................................................
《MATLAB与控制系统。。仿真》实验报告剖析
《MATLAB与控制系统仿真》 实验报告 班级: 学号: 姓名: 时间:2013 年 6 月
目录实验一 MATLAB环境的熟悉与基本运算(一)实验二 MATLAB环境的熟悉与基本运算(二)实验三 MATLAB语言的程序设计 实验四 MATLAB的图形绘制 实验五基于SIMULINK的系统仿真 实验六控制系统的频域与时域分析 实验七控制系统PID校正器设计法 实验八线性方程组求解及函数求极值
实验一 MATLAB环境的熟悉与基本运算(一) 一、实验目的 1.熟悉MATLAB开发环境 2.掌握矩阵、变量、表达式的各种基本运算 二、实验基本原理 1.熟悉MATLAB环境: MATLAB桌面和命令窗口、命令历史窗口、帮助信息浏览器、工作空间浏览器、文件和搜索路径浏览器。 2.掌握MA TLAB常用命令 表1 MA TLAB常用命令 3.MATLAB变量与运算符 3.1变量命名规则 3.2 MATLAB的各种常用运算符 表3 MATLAB关系运算符 表4 MATLAB逻辑运算符
| Or 逻辑或 ~ Not 逻辑非 Xor 逻辑异或 符号功能说明示例符号功能说明示例 :1:1:4;1:2:11 . ;分隔行.. ,分隔列… ()% 注释 [] 构成向量、矩阵!调用操作系统命令 {} 构成单元数组= 用于赋值 4.MATLAB的一维、二维数组的寻访 表6 子数组访问与赋值常用的相关指令格式 三、主要仪器设备及耗材 计算机 四.实验程序及结果 1、新建一个文件夹(自己的名字命名,在机器的最后一个盘符) 2、启动MATLAB,将该文件夹添加到MATLAB路径管理器中。 3、学习使用help命令。
Java画图板课程设计报告
目录 1 引言................................................................................................... 错误!未定义书签。 课程设计选题 .................................................................................. 错误!未定义书签。 课程设计的目的 .............................................................................. 错误!未定义书签。 本选题的设计背景.......................................................................... 错误!未定义书签。 2 需求分析 .............................................................................................. 错误!未定义书签。 功能需求......................................................................................... 错误!未定义书签。 软件开发运行环境........................................................................ 错误!未定义书签。 3 总体设计 .............................................................................................. 错误!未定义书签。 软件结构设计 ................................................................................ 错误!未定义书签。 结构设计................................................................................. 错误!未定义书签。 软件功能模块及主要类设计 ......................................................... 错误!未定义书签。 功能描述 ................................................................................... 错误!未定义书签。 总体结构图............................................................................... 错误!未定义书签。 主要类设计............................................................................... 错误!未定义书签。 4 详细设计与实现.................................................................................. 错误!未定义书签。 主界面............................................................................................. 错误!未定义书签。 主界面功能设计....................................................................... 错误!未定义书签。 主界面设计............................................................................... 错误!未定义书签。 主界面主要代码....................................................................... 错误!未定义书签。 菜单栏............................................................................................. 错误!未定义书签。 菜单栏功能设计....................................................................... 错误!未定义书签。 菜单栏界面设计....................................................................... 错误!未定义书签。 菜单栏主要代码....................................................................... 错误!未定义书签。 工具栏............................................................................................. 错误!未定义书签。 工具栏功能设计....................................................................... 错误!未定义书签。 工具栏界面设计....................................................................... 错误!未定义书签。 工具栏主要代码....................................................................... 错误!未定义书签。