多波束勘测系统工作原理及结构

第二章多波束勘测系统工作原理及结构
多波束系统是70年代兴起、80年代中、末期又得到飞速发展的一项全新的海底地形精密勘测技术。它是当前兴趣的焦点,因为它既有条带测深数据,又同时可获取反映底质属性的回波强度数据(Laurent Hellequin et al.,2003)。该技术采取广角度定向发射和多通道信息接收,获得水下高密度具有上百个波束的条幅式海底地形数据,彻底改变了传统测深技术概念,使测深原理、勘测方法、外围设备和数据处理技术诸方面都发生了巨大变化,大大提高了海底地形勘测的精度、分辨率和工作效率,实现了测深技术史上的一次革命性突破(李家彪等,2000)。多波束系统的工作原理与传统的单波束回声测深仪工作原理类似,都是根据声波在水下往返传播的时间与声速的乘积得到距离,从而得到水深。不同的是单波束测深仪一般采用较宽的发射波束(8°左右)向船底垂直发射,声传播路径不会发生弯曲,来回的路径最短,能量衰减很小,通过对回声信号的幅度检测确定信号往返传播的时间,再根据声波在水介质中的平均传播速度计算测量水深。在多波束系统中,换能器配置有一个或者多个换能器单元的阵列,通过控制不同单元的相位,形成多个具有不同指向角的波束,通常只发射一个波束而在接收时形成多个波束。除换能器天底波束外,外缘波束随着入射角的增加,波束在倾斜穿过水层时会发生折射,同时由于多波束沿航迹方向采用较窄的波束角而在垂直航迹方向采用较宽的覆盖角,要获得整个测幅上精确的水深和位置,必须要精确地知道测量区域水柱的声速剖面和波束在发射和接收时船的姿态和船艏向。因此,多波束测深在系统组成和测量时比单波束测深仪要复杂得多(周兴华等,1999)。
§2.1 多波束勘测系统的工作原理
2.1.1 单波束的形成
2.1.1.1 发射阵和波束的形成
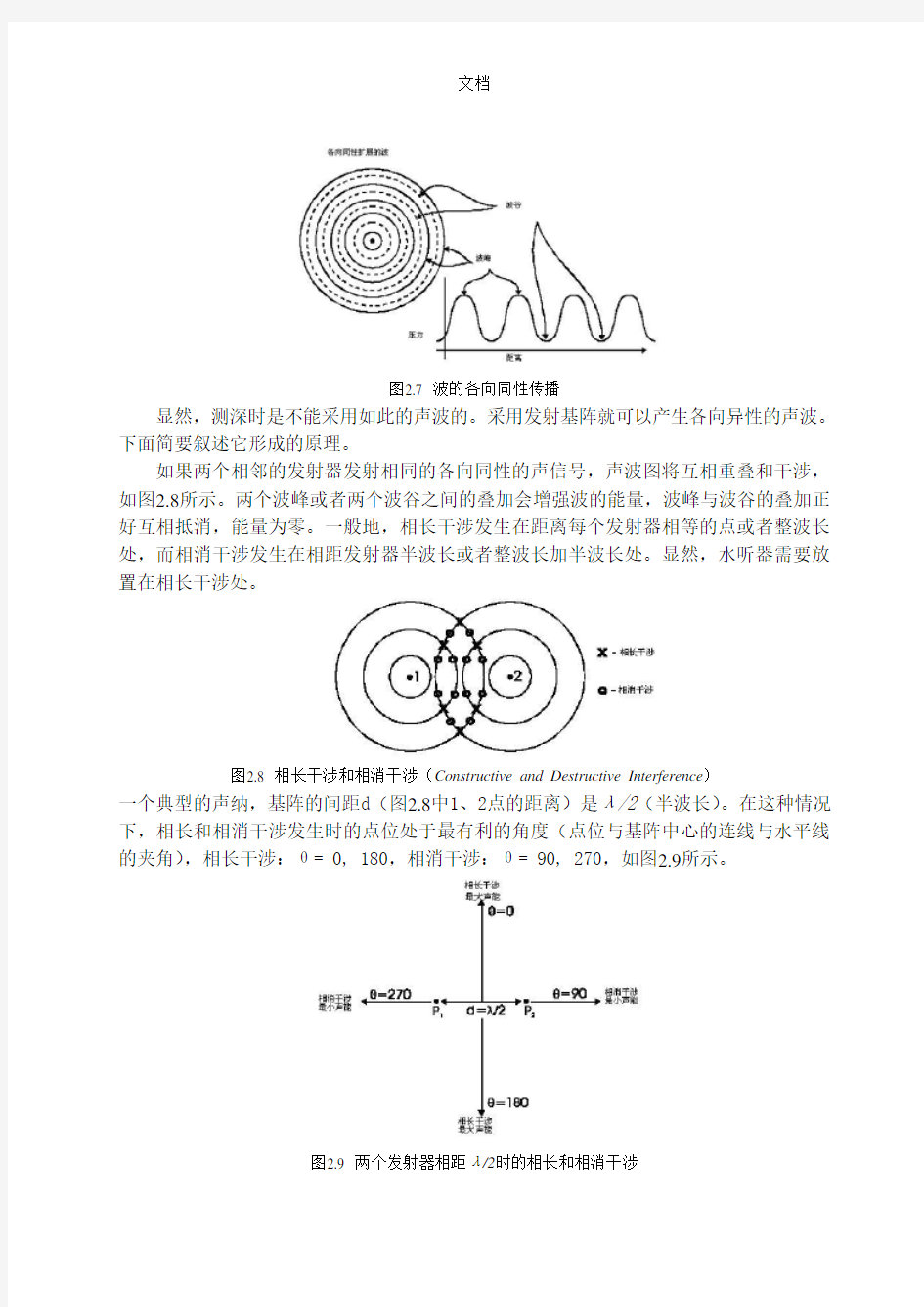
一个单波束在水中发射后,是球形等幅度传播,所以方向上的声能相等。这种均匀传播称为各向同性传播(isotropic expansion),发射阵也叫各向同性源(isotropic source)。例如,一个小石头扔进池塘时就是这种情况,如图2.7所示。
图2.7 波的各向同性传播
显然,测深时是不能采用如此的声波的。采用发射基阵就可以产生各向异性的声波。下面简要叙述它形成的原理。
如果两个相邻的发射器发射相同的各向同性的声信号,声波图将互相重叠和干涉,如图2.8所示。两个波峰或者两个波谷之间的叠加会增强波的能量,波峰与波谷的叠加正好互相抵消,能量为零。一般地,相长干涉发生在距离每个发射器相等的点或者整波长处,而相消干涉发生在相距发射器半波长或者整波长加半波长处。显然,水听器需要放置在相长干涉处。
图2.8 相长干涉和相消干涉(Constructive and Destructive Interference)
一个典型的声纳,基阵的间距d(图2.8中1、2点的距离)是λ/2(半波长)。在这种情况下,相长和相消干涉发生时的点位处于最有利的角度(点位与基阵中心的连线与水平线的夹角),相长干涉:θ= 0, 180,相消干涉:θ= 90, 270,如图2.9所示。
图2.9 两个发射器相距λ/2时的相长和相消干涉
图2.10是两个发射器间距λ/2时的波束能量图(Beam Pattern),左边为平面图,右边
为三维图,从图上可以清楚地看到能量的分布,不同的角度有不同的能量,这就是能量
的指向性(directivity)。如果一个发射阵的能量分布在狭窄的角度中,就称该系统指向性高。真正的发射阵由多个发射器组成,有直线阵和圆形阵等。这里只讨论离散直线阵,
其它阵列类似可以推导出。如图2.11所示,根据两个发射器的基阵可以推导出多个发射器
组成的直线阵的波束图。
图2.10 两个发射器间距λ/2时的波束能量图(Beam Pattern)
图2.11 多基元线性基阵的波束图(Beam Pattern)
图2.11中,能量最大的波束叫主瓣,侧边的一些小瓣是旁瓣,也是相长干涉的地方,
引起了能量的泄漏。旁瓣还可能引起回波,对主瓣的回波产生干扰。旁瓣是不可避免的,可以通过加权的方法降低旁瓣的水平,但是加权后旁瓣水平值降低了,波束却展宽了。
主瓣的中心轴叫最大响应轴(maximum response axis-MRA),主瓣半功率处(相对于主
瓣能量的-3db)角度的两倍就是波束角。发射器越多,基阵越长,则波束角越小,指向
性就越高。设基阵的长度为D,则波束角
θ= 50.6×λ/D (2.36)可以看出,减小波长或者增大基阵的长度都可以提高波束的指向性。但是,基阵的长度
不可能无限增大,而波长越小,在水中衰减得越快,所以指向性不可能无限提高。
2.1.1.2 波束的指向(Beam Steering)
换能器怎样在指定的方向上发射或者接收声波,称为波束的指向。以水听器接收回
波为例。如图2.12,当回波以θ方向到达接收基阵时,首先在点3到达,其次为点2和点1,
则在
图2.12夹角为θ的回波
点2的回波比点3多旅行了距离A=d ′ sin q,点1比点3的回波多旅行了距离B=2d ′ sin q,
相应的增加的时间为
T2=A/c =(d sinθ)/c (2.37)
T1=B/c =(2d sinθ)/c (2.38)计算出偏移时间后,在基阵中作相应的调整,引入延时,使回波在基阵上正好构成
相长干涉,这样就可以使主瓣在指定的方向上,如图2.13所示。
图2.13引入延时后主瓣方向的偏移图2.14多波束的几何构成
2.1.2 多波束的形成
当接收波束发射出扇形波束后,接收波束按一定的间距(等距离或者等角度)与之
相交,就形成了一个个在纵横向的窄波束脚印,如图2.14所示。
设水听器共有N个基元,每个基元i记录的回波S i(t)的振幅为A(t),且
S (t ) = A (t )cos(2p ft )
(2.39) 写成相位的形式为 S (t ) = A (t )cos(f(t ))
(2.40) 或 )()()(t j e t A t S Φ=
(2.41) 其中,f(t ) = 2p ft 。
多波束系统需测量回波S(t)和相位φ(t),然后将模拟接收信号转换为数字信号,采用率一般在1~3ms 之间。所有基元在采样点上的回波和相位值称为时间片(time slice )。
在上节中,讨论了基元i 相对于第一个基元的距离差,转换为相位差为
θλπsin 2id (2.42)
由(2.41)和(2.42)得 )sin 2(sin 2)sin 2()(θλπθλπθλπθid j i id j j i id j i i S e e A e A B i i ===Φ+Φ (2.43)
其中)(θi B 为第i 个基元在角θ方向接收时的回波,则基阵接收的回波为 ∑-==10)sin 2()(N i id j i i e
S s B θλπθ (2.44)
其中i s 为加权系数。如果要求在一个时间片(time slice )里,由N 个基元形成M 个指定方向的波束,用矩阵表示为
??????
? ?????????? ??=??????? ??N MN M M N N M S S S D D D D D D D D D B B B ΛΛΛΛΛΛΛΛΛ2121222211121121)()()(θθθ (2.45)
其中,ij D 为接收角j θ的波束时的第i 个基元的相位差,为)sin 2(j id j e θλπ。为了在如此短的时间(ms 级)完成计算,必须采用一些快速算法。这里,引入快速傅立叶变换(FFT)。
式(2.44)类似于傅立叶变换,设 ∑==N i N ik j i e
h B 0
)2()(πθ (2.46) 得 )(sin 1N k d k ?=-λ
θ (2.47)
由于k 必须为整数,所以k θ的取值受到一定的限制,如d 、N 在一定值时,k θ同k 的关
系表2.1所示。
表2.1 k和θ的对应值
K 0 1 2 3 4 5 …
θ(°) ±0 ±2.4 ±4.8 ±7.2 ±9.6 ±12.0 …
2.1.3 多波束脚印的归位
波束脚印的归位是多波束数据处理的关键问题之一。多波束测量的最终成果是得到地理坐标系(或地方系)下的海底地形或者地物,由于多波束采用广角度定向发射、多阵列信号接收和多个波束形成处理等技术,为了更好的确定波束的空间关系和波束脚印的空间位置,必须首先定义多波束船体参考坐标系VFS,并根据船体坐标系同地理坐标系LLS之间的关系,将波束脚印的船体坐标转化到地理坐标系(或当地坐标系)和某一高程基准面下的平面坐标和高程。该过程即为波束脚印的归位。船体坐标系原点位于换能器中心,x轴指向航向,z轴垂直向下,y轴指向侧向,与x、z轴构成右手正交坐标系。地理坐标系原点为换能器中心,x轴指向地北子午线,y同x垂直指向东,z与x、y轴构成正交坐标系。
归位需要的参数包括船位、船姿、声速断面、波束到达角和往返程时间。归位过程包括如下四个步骤:
(1)姿态改正。
(2)船体坐标系下波束脚印位置的计算。
(3)波束脚印地理坐标的计算。
(4)海底点高程的计算。
为方便波束脚印在船体坐标系下坐标的计算(声线跟踪),现作如下假设:
(1)换能器处于一个平均深度,静、动吃水认为仅对深度有影响,而对平面坐标没有影响。
(2)认为波束的往、返程路径重合。
(3)对于高频发射系统,换能器的航向变化影响可以忽略。
波束脚印船体坐标的计算需要用到三个参量,即垂直参考面下的波束到达角、传播时间和声速剖面。由于海水的作用,声束在海水中不是沿直线传播,而是在不同介质层的界面处发生折射,因此声束在海水中的传播路径为一折线。为了得到波束脚印的真实位置,就必须沿着波束的实际传播路径跟踪波束,该过程即为声线跟踪,通过声线跟踪得到波束脚印船体坐标的计算过程被称为声线弯曲改正。为了计算方便,对声速断面作如下假设:
(1)声速断面是精确的,无代表性误差。
(2)声速在波束形成的垂面内变化,不存在侧向变化。
(3)声速在海水中的传播特性遵循Snell法则。
(4)换能器的动吃水引起的声速剖面的变化对深度的计算可以忽略不计。
根据上述讨论和假设,波束脚印的计算模型可表达为:
Snell 法则可描述为: p C C C n n ====θθθsin sin sin 1100Λ (2.48)
将波束的实际传播路径进行微分,则波束脚印在船体坐标系下的点位(x ,y ,z )可表达为:
))(sin()())(cos()(00=+=+=??y dz z z C x x dz
z z C z z θθ
(2.49)
其一级近似式为: 0
sin 2cos 2000000=+
=+
=y T C x x T C z z p
p θθ (2.50) 更精确的公式见2.1.3。
波束脚印的船体坐标系确定后,下一步就可以转化为地理坐标。转换关系为:
??????+??????=??????y x p r h R y x y x gG g ),,(00 (2.51) 式中,下脚g 、gG 别代表波束脚印的地理坐标、利用GPS 确定的船体地理坐标,R(h,r,p)为船体坐标系与地理坐标系的旋转关系,航向、横摇和纵摇是三个欧拉角。
式(2.49)确定的深度z 仅为换能器面到达海底的垂直距离,测点的实际深度还应该考虑换能器的静吃水h ss 、动吃水h ds 、船体姿态对深度的影响h a ,若潮位的变化h tide 是相对
图2.15 单个波束脚印坐标的计算
于某一深度基准面或者高程基准面确定的,则波束脚印的高程为:
a ds ss tide g h h h h z z ++++= (2.52) 换能器的静吃水在测量前或换能器安装后被量定,作为一个常量输入到多波束的数据处理单元中;动吃水是由于船体的运动而产生的,它可通过姿态传感器中的Heaven 参数确定。船体姿态对波束脚印的地理坐标也有一定的影响,可通过姿态传感器的横摇r 和纵摇p 参数确定。上述参数的测定及其对波束脚印平面位置和深度的补偿属于纯几何问题,武汉大学的赵建虎博士对此有详细的研究,本文不再赘述。
§2.2 多波束勘测系统的组成结构
2.2.1 多波束的组成
多波束系统主要由三个部分组成。第一部分是多波束的主系统,主要包括换能器阵列,收发器和数据处理、显示和记录单元等;第二部分是辅助系统,包括定位系统、船姿(横摇、纵摇、起伏和船艏向)测量传感器和测量水柱声速剖面的声速仪;第三部分是数据存贮和后处理系统,包括数据处理计算机、数据存贮设备和绘图仪等(周兴华等,1999)。
2.2.2 换能器的物理构成
换能器是用来作为电声能量转换的重要器件。通常把电能转换成声能的器件称为发射换能器,把水下声能转换成电能的器件称为接收换能器(或水听器),许多主动声纳中采用同一的换能器兼作发射和接收(秦臻,1984)。
水声换能器技术由3类组成,一是水声换能器材料;二是水声换能器设计;三是水声换能器制作。水声换能器材料方面涉及材料的配置、生成及成型等3方面的技术。水声换能器设计方面涉及性能设计及结构设计等两个方面的技术。水声换能器制作涉及加工、安装及检测等3方面的技术。这3类水声换能器技术,是获取高性能、高质量水声换能器的保障。这3类水声换能器技术的发展,直接促进了水声换能器的发展,影响着声纳的发展。
水深换能器就其所采用的换能器材料大致可分为两大类,一类是磁致伸缩换能器,一类是电致伸缩换能器。磁致伸缩材料包含着具有水久磁矩的原子,它们以这种方式被耦合到晶格上,使之在加磁场时能够改变晶格的间距,从而相应地改变宏观样品的尺寸。由于磁致伸缩力与晶格变化有关,所以这个力可以和固体材料受机械变形所产生的弹性力相比较。磁致伸缩换能器把大的恒定磁场和较小的交变磁场叠加起来使之线性化,这种线性化的工作方式常常称为压磁,它最适合在声阻抗比较高的介质(如水)中工作(阎福旺等)。不过,这类材料在高频工作时有着高的涡流损耗和磁致损耗,以致电声转换效率
数据网
GPS
声速断面
罗经
姿态传感器
换能器
Transceiver
操作和检
测单元 监控器
导航监控器 后处理 实时数据处理工作站 数据存储 绘图仪 打印机
声纳影像记录
数据存储
图 2.1: Simrad EM950/1000 多波束声纳系统组成单元
降低,而且工作时,还需外加极化偏置。因此,目前多数声纳换能器采用了具有良好机电性能的电致伸缩材料(秦臻,1984)。电致伸缩材料是磁致伸缩材料的电学类比,它有永久性的电矩。电矩与晶格之间这样耦合,使之在外加电场时,尺寸发生变化。实际上这些极化了的材料,由于已经线性化,因而能够用描述压电材料的方法描述它。石英或许是最早实际用于换能器的材料,此后,被广泛用于实验工作、声能学和超声学方面。大约在1950年前后,能够实际应用的电致伸缩材料开始出现,这些材料能够做成陶瓷,在极化后有极好的压电性质。钛酸钡是这类材料中首先被广泛使用的材料。锆钛酸铅现在很多应用中取代了钛酸钡(阎福旺等)。
换能器是一个将电能转换成声能及逆过程的装置。不管使用的多波束是哪种类型,换能器是单个的或是一个阵列,都必须要在测量的海底形成一个声照射区(ensonified area ),换能器通过发射声脉冲并接收产生的回波获得水深测量值。换能器的大小是根据波束的宽度需要来设计的。波束的宽度被定义为从天底到扩展波面半功率点的角距离,半功率的量值是-3dB 。如图2-5所示[Wells ,1996]。
图2-5 波束宽度
每个多波束系统都有一个工作频率,换能器是由多个阵元组成的阵列。整个换能器阵列的大小是根据这样一个总的原则确定的,即波束宽度与横跨孔径的波长成反比。反之,如果已选择了一个需要的波长,孔径的大小就可以用这个原则来确定[de Moustier, 1996]。
如果: 需要的波束宽度 β=2°(=0.035rad )
选择的频率为 F=100KHz , 声速C=1500m/s
波长 λ=C
F =0.015m
由总的原则: 孔径=1βλ?
得到: 孔径=0.43m
很明显波束宽度越窄,孔径必定也越大。构成这个孔径的阵元之间必须以某种方式
波束宽度
隔开,以尽可能减少光栅瓣的产生,这可以通过阵元间相隔波长一半的距离来实现,如果阵元间隔小于这个距离就可能看到光栅瓣。由阵元组成的换能器,理想的是阵列看起来象是一个连续的阵元。对于高频,要求阵元之间的间距要比阵元本身小,因此阵元在横行上要交错排列。旁瓣抑制通过单个阵元对整个阵列面作用的权重来实现。EM950的换能器(见图2-6a)是一个直径45cm,扇形角为160°的扇形圆柱体,由一个换能器完成发射和接收,它由128个压电陶瓷条组成,每个陶瓷条由5个阵元组成,这5个阵元在前后方向上有固定的权重,在左右方向上间隔为1.25°,前后方向上的波束开角为3.3°,波束中心与换能器面垂直。
图2-6a EM950换能器
EM3000的换能器(图2-6b)由不同的阵列来完成接收和发射。发射阵列有56个环形阵元。接收阵阵列有80个栅条,每个栅条包含有3个圆柱形阵元。接收栅条以半随机方式交错排列,以使沿航迹方向的旁瓣级低于-20dB。
图2-6b EM3000换能器
根据上面的讨论,换能器阵列是设计发射一个沿航迹方向非常窄而垂直航迹方向宽的脉冲,垂直航迹方向的宽度取决于换能器和换能器阵元的波束图的宽度。一个典型的多波束系统发射的波束宽度沿航迹方向小于3°,而垂直航迹方向在天底两侧大于75°。对没有自动纵摇稳定的系统发射的波束,接收波束的长度必须至少长于纵摇最大可能的变化才不致丢失数据(图2-7),如EM3000沿航迹方向的接收波束宽度是25°,Seabat8111换能器接收波束沿航迹方向的波束宽度是15°。在米氏交叉(Mill’s Cross)这样结构的换能器,要求接收阵列垂直于发射阵列(图2-8)。
图2-7 接收波束的最小宽度
图2-8 米氏交叉
2.2.3 多波束的底部检测单元
一般,多波束测深系统的回波检测方式有两种,幅度检测和相位检测。当入射角小时,回波幅度高,持续时间短;当入射角变得十分大时,回波幅度低且持续时间长,但波束间的相位差变大,故振幅检测对于中间波束传播时间的检测具有较高的精度,而对边沿波束的检测精度较差,而相位检测正好相反。精密多波束测深系统利用相位检测用于边沿波束检测,振幅检测用于中间波束检测,由系统取舍。这样,在可保证每个波束检测精度的同时,又可保证整个波束的检测精度一致,从而达到波束旅行时高精度测定
发射阵列 接收阵列 沿航迹方向 最大向上纵摇时声照射区
最大向下纵摇时声照射区 要求的最小接收 波束长度
的目的[1] [2]。
BDI (Bearing Direction Indicator -方位指示)和WMT (Weighted Mean Time -加权平均时间)是两种不同的计算波束到达角和旅行时的方法。BDI 试图先定位每个波束回波的方向即到达角,然后再精确计算旅行时;而WMT 先固定每个波束中心为到达角,然后再精确计算出每个回波的旅行时[3] [4] [5]。为方便后续问题的展开,下面简要介绍它们的原理。
1、BDI 处理方法
在一个发射接收周期(ping )内,波束形成采用的FFT 处理方法中的数据可表示为矩阵的形式,设一个周期内包含M 个时间片(time slice ),每个时间片分别表示为t 1,t 2,…,t M ,相对的时间周期起点为t 0。设有N 个波束,每个时间片则可观测N 个幅度值,θ1,θ2,…,θN ,如图1所示。
图1 单ping 回波强度矩阵
为了防止旁瓣或海底混响等其它因素引起的回波噪声,对于每个时间片,使用一个动态阈值,也叫检测门限,高于阈值的幅度接受,低于阈值的幅度视为噪声。阈值由旁瓣水平和噪声水平决定,每个时间片均不同[3]。将高于阈值的幅度值进行拟合,求得幅度的极大值,同时记下相应的角度值,就是该时间片对应的DOA ,对于如图2所示。这样,每个幅度极大值对应另外两个数据:角度和时间。这3个数反映了波束发射到接收的过程,以击中(hit )表示,即每个击中用这3个数据表示。
M M M A A A A A A A A A A A A M M M M
M M M M M M
ΛΛΛΛΛΛ13121111
13121111
13121111
θθθ 波束角 回波幅度
图2 单时间片中精确角度的估计
如图3(取自文献3)所示,在一个发射接收周期内,将所有的击中以角度和时间表示出来,在每个波束范围内,计算平均时间t mean 和方差σ,保留与t mean 相差1倍σ内的击中,最后根据幅度加权计算出每个波束的DOA 和TOA [3],图中表示为B θ和B t 。为了问题的简化,本文没有考虑姿态补偿。 ∑∑=i
i i
A A
DOA θ (1) ∑∑=i i
i A A t TOA (2)
图3 幅度加权平均的DOA 和TOA
图4 参与计算的幅度值
2、WMT处理方法
WMT首先固定一系列的波束角,这些波束角已经进行了姿态补偿。然后计算出每个波束角的精确的TOA。固定的波束角往往并不在波束轴中心。在每个时间片,都可得到每个固定角的幅度值,在整个发射接收周期内,可得到每个固定角的时序观测的幅度值,使用开始、结束门限和动态阈值,就可得到最后计算TOA需要的幅度值,然后按幅度加权就可得到精确的TOA,如图4(取自文献3)所示,图中粗线即为计算TOA保留的幅度值,处于开始门、结束门外和动态阈值下的均被忽略,最后的TOA计算同式(2)。
具体是选择BDI还是WMT处理方法,要根据具体情况对待。对于镜面反射,反射强度大,回波脉冲尖,持续时间短,此时BDI就不太适用,因为很难准确地计算回波的角度,因而采用WMT方法;相反,在非镜面区,反射强度小,回波脉冲平缓,持续时间长,此时WMT就不太适用,因为很难准确地计算回波时间,因而采用BDI方法[3] [4] [5]。
(完整版)多波束测深与测扫声呐的比较
多波束测深与测扫声呐的比较: (1)侧扫声纳是目前常用的海底目标(如沉船、水雷、管线等)探测工具,在测深领域,多波束以全覆盖和高效率证明了它的优越性。由于多波束具有很高的分辨率,目前在工程上已经开始应用多波束进行海底目标物的探测。 (2)多波束的最大优点在于定位精度高,但其适用范围不如侧扫声纳广泛,尤其受到水深和波束角的限制,多波束和侧扫声纳在探测海底目标时具有很好的互补性,同时应用可以提高目标解译的准确性。 (3)侧扫声纳能直观地提供海底形态的声成像,但这种声像只能由目标影子长度等参数估计目标的高度,所以对数据解译人员的要求很高。多波束测深系统主要用于进行水下地形测量。 (4)探测目标机制的差异:多波束是一种测深工具而并非成像系统,无法直接在记录纸上进行打印,必须先构建数字地形模型(digital terrainmode,l DTM),再根据DTM构建地貌影像图,从而能够反映细微的地形起伏所导致的坡度和坡向变化;此外,多波束的中央波束探测效好,边缘波束效果差;多波束采用三维可视化的方法进行目标判断,在3D GIS系统中可以直接提取目标物的平面位置和高度,还能够从不同的角度进行观察,便于掌握目标物的形状特征。但是,除非我们在进行测深的同时采集反向散射强度信息,否则我们无法得到与目标物的底质类型相关的信息,因此,多波束比较适合于沉船或者管线等容易根据形状进行判断的目标。 现在的侧扫声纳技术有两个缺点,首先它的横向分辨率取决于声纳阵的水平角宽,分辨率随距离的增加而线性增大,其次它给不出海底的准确深度。当前只有两种声纳可做海底三维成像,即等深线成像和反向散射声成像,前一种是多波束测深声纳(如Multi -beamSonarSystem) ,后一种是测深侧扫声纳。总体说来,前者适宜于安装在船上做大面积测量,后者适宜于安装在各类水下载体上,包括拖体、水下机器人(AUV) 、遥控潜水器( ROV ) 和载人潜水器(HUV) ,进行细致的测量。 侧扫声纳通常安装在拖体上,其到海底面的距离是可以调节的,而多波束换能器大多数固定安装在船体上,随着水深的增大,换能器至海底的距离增加,导致波束与海底面的接触面即脚印 变大,所以多波束垂直于航行方向的分辨率降低。此外,水深增大也导致换能器单位时间内能够接收到的有效声信号数目(即采样更新率)减少,因此沿着航行方向的分辨率同样降低。 侧扫声纳不存在波束角的问题,而Seabat8101的波束角为115b,每个声波波束与海底面的接触面被视为一个水深点,因此波束角的影响与水深是正相关的。 在同样的海况条件下,多波束数据的信噪比常常比侧扫声纳图像要高,这是因为多波束的旁瓣波束被有效压制,因而没有假回波。 多波束的定位精度比侧扫声纳要高2~5m。这是因为,一方面多波束的平面位置误差传递方程比侧扫声纳系统要简单;另一方面多波束系统中的电罗经和船资测量传感器具有很高的精度,可以精确地测定船体的姿态和船首向;此外,多波束系统的校正比超短基线要容易,各种系统 误差的消除也更为彻底。因此,对于多波束靠近中央波束所探测到的海底目标,可以认为其定位精度近似地等于GPS本身所能提供的精度。
天然气供气系统结构与工作原理
安全管理编号:LX-FS-A21055 天然气供气系统结构与工作原理 In the daily work environment, plan the important work to be done in the future, and require the personnel to jointly abide by the corresponding procedures and code of conduct, so that the overall behavior or activity reaches the specified standard 编写:_________________________ 审批:_________________________ 时间:________年_____月_____日 A4打印/ 新修订/ 完整/ 内容可编辑
天然气供气系统结构与工作原理 使用说明:本安全管理资料适用于日常工作环境中对安全相关工作进行具有统筹性,导向性的规划,并要求相关人员共同遵守对应的办事规程与行动准则,使整体行为或活动达到或超越规定的标准。资料内容可按真实状况进行条款调整,套用时请仔细阅读。 天然气供气系统的性能、同发动机优化匹配情况,对天然气发动机性能有至关重要的影响。如表4-1所示,在解放CA6102型汽油机上,采用不同的供气系统装置,提高压缩比,充分证明压缩比的提高可部分补偿发动机的标定功率损失,而且采用性能优良的供气装置可使标定功率损失大幅度降低。原机压缩比为6.75时,采用1#供气装置的标定功率损失达24.2%,压缩比提高到7.6时标定功率损失降为18.1%。而采用2#供气装置,压缩比为7.6时,同原机型相比,标定功率损失可降低到10%左右。
回转窑的结构及工作原理概述21页
回转窑的结构及工作原理概述 回转窑的结构及工作原理概述 回转窑的筒体由钢板卷制而成,筒体内镶砌耐火衬,且与水平线成规定的斜度,由3个轮带支承在各挡支承装置上,在入料端轮带附近的跨内筒体上用切向弹簧板固定一个大齿圈,其下有一个小齿轮与其啮合。正常运转时,由主传动电动机经主减速器向该开式齿轮装置传递动力,驱动回转窑。 物料从窑尾(筒体的高端)进入回转窑内煅烧。由于筒体的倾斜和缓慢的回转作用,物料既沿圆周方向翻滚又沿轴向(从高端向低端)移动,继续完成其工艺过程,最后,生成熟料经窑头罩进入冷却机冷却。 燃料由窑头喷入窑内,燃烧产生的废气与物料进行交换后,由窑尾导出。本设计不含燃料的燃烧器。 该窑在结构方面有下列主要特点: 1、简体采用保证五项机械性能(σa、σb、σ%、αk和冷弯试验)的 20g及Q235-B钢板卷制,通常采用自动焊焊接。筒体壁厚:一般为25mm,烧成带为32mm,轮带下为65mm,由轮带下到跨间有38mm厚的过渡段节,从而使筒体的设计更为合理,既保证横截面的刚性又改善了支承装置的受力状态。
2、在筒体出料端有耐高温、耐磨损的窑口护板,筒体窑尾端由一米长1Cr18Ni9Ti钢板制作。其中窑头护板与冷风套组成分格的套筒空间,从喇叭口向筒内吹冷风冷却窑头护板的非工作面,以有利该部分的长期安全工作,在筒体上套有三个矩形实心轮带。轮带与筒体垫板间的间隙由热膨胀量决定,当窑正常运转时,轮带能适度套在筒体上,以减少筒体径向变形。 3、传动系统用单传动,由变频电动机驱动硬齿面三级圆柱齿轮减速器,再带动窑的开式齿轮副,该传动装置采用胶块联轴器,以增加传动的平稳性,设有连接保安电源的辅助传动装置,可保证主电源中断时仍能盘窑操作,防止筒体弯曲并便利检修。 4、回转窑窑头密封采用罩壳气封、迷宫加弹簧刚片双层柔性密封装置。通过喇叭口吹入适量的冷空气冷却护板,冷空气受热后从顶部排走;通过交迭的耐热弹簧钢片下柔性密封板压紧冷风套筒体,保证在窑头筒体稍有偏摆时仍能保持密封作用。 5、回转窑窑尾密封采用钢片加石墨柔性密封。该装置安装简单方便,使用安全可靠。 回转窑的主要结构 回转窑窑体的主要结构包括有: 1.窑壳,它是回转窑(旋窑)的主体,窑壳钢板厚度在40mm 左右的钢板,胎环的附近,因为承重比较大,此处的窑壳钢板要厚一些。窑壳的内部砌有一层200mm左右的耐火砖。窑壳在运转的时候,由于高
除氧器原理
一、除氧器是什么? ——除去水中溶解氧的密闭容器。 注解:水——指锅炉给水,即进入锅炉的水; 溶解氧——以分子形式存在于水中的氧气,即氧分子O2; 密闭容器——压力容器,一般为低压。 二、为什么要对锅炉给水进行除氧? ——锅炉水中的溶解氧,和炉体金属铁组成腐蚀电池,铁是阳极,失去电子成为亚铁离子,氧为阴极进行还原,溶解氧的这种阴极去极化的作用,造成对锅炉铁的腐蚀,此外氧还会把溶于水的氢氧化铁沉淀,使亚铁离子浓度降低,从而使腐蚀加剧。当水中含有溶解氧时,造成对炉体的腐蚀,随着含氧浓度的增加,腐蚀
如图,进入锅炉的给水经过加热成为高温高压水蒸汽,高温高压水蒸汽推动汽轮机作功,从而带动发电机发电;作功后的蒸汽(称为乏汽)进入凝汽器被凝结成水(凝结水);凝结水经过低压加热器加热后进入除氧器;经过除氧后的凝结水进入高压加热器,进一步提高水温,然后进入锅炉,从而完成一个工质循环。这里工质当然是水及水蒸汽。 四、除氧器为什么通常都很大? ——当某种原因上述循环中断而锅炉停机时,为了使锅炉有足够的时间冷却,需要继续向锅炉进水,这部分水从何而来呢?只能是存储在某个容器中,高低压加热器作为换热设备不具备存储功能,所以这个储水功能有除氧器承担,这就是为什么除氧器通常都很大的原因之一。 五、 如图,进水含氧量50ppb,出水含氧量5ppb,问其余45ppb哪儿去了? 显然它只能被排出容器外。将溶解氧排出容器外的装置称为排汽装置。由此可见,排汽装置是否正确合理,是决定出水含氧量是否合格的主要因素之一。简单地说,本来需要除去45ppb的溶解氧,因排汽装置不合理,只排出了30ppb,于是剩下的20ppb重新溶入水中,出水含氧量必然超标。
气路系统基本结构及工作原理16页
气路系统结构及工作原理 气压系统由空压机、干燥器、滤清器、自动排水器、防冻器及各类控制阀件组成,压缩空气经多级净化处理后,供底盘行驶及车上作业使用。 一.结构特点 气压系统主要由以下组成: ?压缩空气气源 ?动力系统控制气路 ?底盘气路 ?绞车气路 ?司钻控制 压缩空气气源整车共用,底盘气路和绞车气路均为相对独立管路,并相互锁定;分动箱的动力操作手柄在切换发动机动力时,同时切换压缩空气气源,钻机车在行驶状态接通底盘气路,钻修作业接通绞车气路。当二者其一管路接通压缩空气气源时,另外一路则被切断压缩空气气源,确保设备操作安全,减少气路管线泄漏。方框图如下: 二.压缩空气气源 1.空气压缩机,往复活塞结构,4缸V形排列;2台,分别安装在2台发动 机右侧前部,由曲轴端皮带轮驱动;强制水冷,润滑,冷却管线与发动机冷却水道相连,润滑管线与发动机润滑系统相连。 2.调压阀,安装在空气压缩机缸体侧部,调定控制气压系统空气压力,调定 值0.8±0.05 MPa,当系统气体压力升高,达到调定值时,调压阀动作发出气动信号,分两路,一路信号接通两台空气压缩机卸荷阀,顶开各气缸
进气阀门,空压机置空负荷运转状态,停止向气压系统供气;另一路信号接通两台干燥器排泄口,干燥器储气室内的干燥空气迅速反向流动流,吸附干燥剂层的水份,迅速排出干燥器体外,使其干燥剂再生。系统压力低于调定值,调压阀气信号消失,空压机卸荷阀复位,空压机重新进入正常工作状态,继续向系统供应压缩空气,同时,干燥器排泄口关闭,干燥器重新开始工作,吸附干燥系统压缩空气。 3.干燥器,吸附再生式结构,2台,各自连接在空气压缩机的输出气路处。 内装干燥剂,当湿空气流过时吸附水份,输出干燥空气。当系统压力达到调定值时,调压阀发生指令,打开干燥器排泄口,干燥器储气室内的干燥空气迅速反向流动流,经干燥剂层,吸附其中的水份,并排出干燥器,使其干燥剂再生。系统压力低于调定值,调压阀气信号消失,干燥器排泄口关闭,干燥器重新开始工作,吸附干燥系统压缩空气。干燥器排泄口装有电热塞,当气温低于0℃时自动将电源接通,加热排泄口,防止冰冻。4.空气滤清器,旋风滤芯结构,压缩空气进入滤清器,在导流片的作用下飞 速旋转,离心力迫使较大的水滴和固体杂质抛向筒壁,集聚到下部排泄口; 压缩空气再经滤芯过滤,进一步净化。 5.自动排水器,浮球结构,进水口与滤清器排泄口连接,当聚集的液面升高 到设定位置,将浮球抬起,打开排泄口,排除废液。 6.防冻器,吸管喷射结构,串联在压缩空气管道中,当气温低于4℃时,可 向防冻器内加注乙二醇或其他防冻剂,当空气进入防冻器喷射流动时,吸管口形成负压区,乙二醇经吸管混合在压缩空气射流中,充分雾化,降低管道中压缩空气的凝固点,防止管道冻裂和冰堵,确保设备冬季正常运行。
多波束勘测系统工作基础学习知识原理及其结构
第二章多波束勘测系统工作原理及结构 多波束系统是70年代兴起、80年代中、末期又得到飞速发展的一项全新的海底地形精密勘测技术。它是当前兴趣的焦点,因为它既有条带测深数据,又同时可获取反映底质属性的回波强度数据(Laurent Hellequin et al.,2003)。该技术采取广角度定向发射和多通道信息接收,获得水下高密度具有上百个波束的条幅式海底地形数据,彻底改变了传统测深技术概念,使测深原理、勘测方法、外围设备和数据处理技术诸方面都发生了巨大变化,大大提高了海底地形勘测的精度、分辨率和工作效率,实现了测深技术史上的一次革命性突破(李家彪等,2000)。多波束系统的工作原理与传统的单波束回声测深仪工作原理类似,都是根据声波在水下往返传播的时间与声速的乘积得到距离,从而得到水深。不同的是单波束测深仪一般采用较宽的发射波束(8°左右)向船底垂直发射,声传播路径不会发生弯曲,来回的路径最短,能量衰减很小,通过对回声信号的幅度检测确定信号往返传播的时间,再根据声波在水介质中的平均传播速度计算测量水深。在多波束系统中,换能器配置有一个或者多个换能器单元的阵列,通过控制不同单元的相位,形成多个具有不同指向角的波束,通常只发射一个波束而在接收时形成多个波束。除换能器天底波束外,外缘波束随着入射角的增加,波束在倾斜穿过水层时会发生折射,同时由于多波束沿航迹方向采用较窄的波束角而在垂直航迹方向采用较宽的覆盖角,要获得整个测幅上精确的水深和位置,必须要精确地知道测量区域水柱的声速剖面和波束在发射和接收时船的姿态和船艏向。因此,多波束测深在系统组成和测量时比单波束测深仪要复杂得多(周兴华等,1999)。 §2.1 多波束勘测系统的工作原理 2.1.1 单波束的形成 2.1.1.1 发射阵和波束的形成 一个单波束在水中发射后,是球形等幅度传播,所以方向上的声能相等。这种均匀传播称为各向同性传播(isotropic expansion),发射阵也叫各向同性源(isotropic source)。例如,一个小石头扔进池塘时就是这种情况,如图2.7所示。
热力喷雾式除氧器的工作原理
热力喷雾式除氧器的工作原理 发布日期:2011-10-09 来源:网络浏览次数:105 热力喷雾式除氧器是一类能够从水中除去氧气的设备。除氧器种类繁多,较重要的大致可分为以气体溶解定律为基础的热力除氧器、真空除氧器、解析除氧器,类似离子交换器的氧化还原树脂除氧器,利用氧与铁发生化学反应的铁屑除氧器等,后二者往往被纳入除氧剂法,但从其除氧作用的方式和必须要有的设备等特征来看,归入除氧器法则更为合适。本文为您详细介绍了热力喷雾式除氧器的工作原理。 热力喷雾式除氧器的工作原理 概述: 锅炉给水有严格的要求,首先需要经软化水工艺或除盐水处理,使锅炉受热面内部不结水垢。但是,水中仍含有氧气和其他气体,氧气是一种主要的去极化剂,能造成锅炉设备及热力系统金属面产生腐蚀,这种腐蚀经常是局部性溃疡腐蚀,严重时造成金属壁穿孔,不仅大大降低了锅炉设备的寿命,而且影响锅炉及热力系统的安全性。 给水的除氧是电厂锅炉或工业锅炉防止腐蚀的主要方法。为了确保锅炉安全经济运行,国家颁布的《低压锅炉水质标准》(GB1576-85)中规定,凡是额定蒸发量大于2T/H 的锅炉均要除氧。锐志环保公司设计生产的热力喷雾式除氧器作为驱除锅炉用水中所含的溶解氧的环保设备,能很好地保护锅炉免受氧的腐蚀。 为了防止锅炉系统的氧腐蚀,国内外研制开发的重点在从给水中除去溶解氧,除氧器法是使软化水通过除氧器后再供给锅炉的方法,软化法可有效地防止硬度成分结垢,能否防止氧腐蚀和腐蚀产物结垢,关键要看除氧器的性能 除氧器是一类能够从水中除去氧气的设备。除氧器种类繁多,较重要的大致可分为以气体溶解定律为基础的热力除氧器、真空除氧器、解析除氧器,类似离子交换器的氧化
内置式除氧器的工作原理
內置式除氧器的工作原理 凝結水從盤式恒速噴嘴噴入除氧器汽空間,進行初步除氧,然後落入水空間流向出水口;加熱蒸汽排管沿除氧器筒體軸向均布,加熱蒸汽通過排管從水下送入除氧器,加熱蒸汽與水混合加熱,同時對水流進行擾動,並將水中的溶解氧及其它不凝結氣體從水中帶出水面,達到對凝結水進行深度除氧的目的;水在除氧器中的流程越長,則對水進行深度除氧的效果越好。 蒸汽從水下送入,未凝結的加熱蒸汽(此時為飽和蒸汽)攜帶不凝結氣體逸出水面流向噴嘴的排氣區域(噴嘴周圍排氣區域為未飽和水噴霧區),在排氣區域未凝結的加熱蒸汽凝結為水、不凝結氣體則從排氣口排出。 不凝結氣體在流向排氣口的流程中,除氧器筒體直徑越大,在水容積一定的情況下,則汽空間不凝結氣體分壓力越小,這樣就能有效控制不凝結氣體在液面的擴散,避免二次溶氧的發生,因此,除氧器筒體採用大直徑為佳。我公司供貨的300MW及以上的內置式除氧器通常採用φ3800的直徑。 內置式除氧器突出特點 設備整機價格低於常規有頭除氧器(300MW及以上機組);節省土建費用:除氧間高度降低3-4米; 排汽損失低:每台機組每年可節省運行費用幾十萬元;負荷變化範圍在10%-110%之間時,均能保證出水含氧量小於5ppb; 單容器結構,系統設計簡單優化,避免應力裂紋,抗震性能優越;重量較輕,低振動;
Stork公司原裝噴嘴,無轉動部件,免維護,性能高度可靠;直徑及介面設計靈活,便於運輸和安裝佈置; 特點 ?高可靠性和實用性 ?講含氧量降低至任意期望的水準。保證在10%-110%的負荷變化範圍內,含氧量遠低於5ppb ?由於水的噴射裝置同時作為一個內置的混合式排汽冷凝器,使得出口蒸汽排放非常低 ?易於控制,可滑壓運行 ?低噪音 ?無游離的CO2(水中的CO2溶入量取決於水的PH值) ?在起動時,除氧器加壓即可獲得除氧水 ?(加熱)蒸汽或汽/水混合物均可作為除氧/加熱介質?水加熱除氧;無需外置的排汽擴容器 ?可直接與自然和強制迴圈鍋爐的蒸發盤管相連接 ?優異的應付緊急情況(如汽輪機突然停機)的能力(除氧器的汽空間起著平衡管線的作用) ?除氧器出力在10-6000t/h,可滿足特殊出力要求 ?噴嘴的調節比至少可達10:1
除氧器除氧的原理
除氧器除氧的原理(热力除氧) 两个必要条件: 1、亨利定律:当液体表面的某种气体与溶解于液体中该气体处于进/正 比:b=KPb/Po ( mg/L ) 当液面上不凝结气体的分压力一直维持零值,小于水中该溶解气体的平衡压力Pb时,该气体就会在不平衡压力差△P的作用下,自水中离析出来。即要及时将液面上的气体排出,使液面上不凝结气体的分压力近似为零。 2、道尔顿定律:混合气体的全压力等于各组成气体的分压力之和,除氧塔空间的总压力P等于水中所溶解各种气体在水面上不凝结气体的分压力Pi与水面上蒸汽分压力Ps之和,即:P=∑Pi ﹢Ps 在除氧器中,将水加热至工作压力下的饱和温度,水逐渐蒸发,水表面的蒸汽压力逐渐增大,近似等于总压力,其它气体的分压力近于或等于零,就可能让水中的各种气体完全析出。 热力除喷雾式氧器 原理:热力除氧的原理是根据气体溶解定律(道尔顿和亨利定律)来除掉水中的溶解氧及CO2等其它气体。 需要除氧的含氧水经过除氧头中的喷嘴雾化成细滴,雾状的水滴在经过填料层落至除氧水贮水箱内。蒸气由下而上流动以加热水滴,被除去的氧气和部分蒸气由顶部排气管排出。与淋水盘式除氧器相比,喷雾式除氧器具有体积小、重量轻、结构简单、维护方便、除氧效果好和对进水温度要求低等优点,因此应用较为广泛。 按照工作压力可将热力除氧器分为低压热力除氧器(工作蒸汽压力为0.02Mpa,水温104℃)和高压热力除氧器(工作蒸汽压力大于0.32Mpa,水温大于145℃)。 内置式除氧器及安全节能分析 2007-6-28 16:42:00 朱志忠供稿收藏 1概要 目前国内电站大多使用传统式除氧器对给水进行除氧,各种教材、资料基本上都是介 绍传统式除氧器的原理及其使用和维护。随着传统式除氧器一些弊端的出现,研究人员 开发了一种新型的内置式除氧器,并在电站中实际应用。尽管还存在一些问题,但这种 除氧器结构新颖、加热速度快、除氧效果好,只要善于使用和维护,仍不失为一种优良 的除氧器。 2内置式除氧器原理 2.1传统除氧器存在的问题
EM950多波束系统简介
Simrad EM950多波束测深系统及其相关设备的简介 刘胜旋 (广州海洋地质调查局第二海洋地质调查大队510760) 摘要本文主要介绍挪威Simrad公司的EM950型多波束测深系统,对系统的各个关键部件如换能器、底部检测单元、操作单元等进行了较为详细地介绍,同时还对系统参数测试的步骤进行了详细的描述,最后是与系统相配套使用的其它相关设备。 关键词Ping(声脉冲),陶瓷感应棒(ceramic stave),Pitch,Roll,Swath(条幅),OPU,DPU 一引言 多波束测深(Multibeam Echo Sounding)系统的出现,为研究海底地形地貌、寻找沉没于水中的飞机船舰、进行水下考古、铺设海底管线、航道岸提测量、工程疏浚的土方计算等一系列工作提供了可靠的手段。为了顺利完成“我国专属经济区和大陆架勘测”专项(简称“126”专项),我国多家从事海洋地质研究的单位于1998年从挪威Simrad 公司分别引进了多套EM系列多波束测深系统。其中国土资源部(原地矿部)广州海洋地质调查局引进了一套EM950型及一套EM3000型的多波束测深系统。现结合一年来的使用经验系统地介绍一下EM950型多波束测深系统的技术指标、工作性能、各种参数的校正及相关设备等内容。 二Simrad EM950多波束测深系统 (一)基本技术指标 Simrad EM950 是一种高分辨率海底地形测深系统。它的主要技术指标为:发射频率:95kHz 脉冲宽度:0.2ms 测深范围:探头以下3-400米 波束宽度: 2.3°×3.3° 覆盖宽度:最高可达7.4倍水深 波束数:120个(每个脉冲60个) 测深精度:15cm或0.25%水深 EM950采用95 kHz的发射频率,这个频率兼顾了在海水和淡水中的工作能力。其在海水中的吸收系数大约为30dB/km,当所测水深大于140m时,可以得到1000m的水平覆盖宽度。在淡水的吸收系数大约为2—3dB/km。当在河口或河口附近等含有大量泥沙的水域中工作时,因其发射频率的特殊性,它的测程并不会因吸收衰减而受到太大的影响,但会因
除氧器工作原理
除氧器的工作原理 一、概述 除氧器的主要作用是除去给水中的氧气,保证给水的品质。水中溶解了氧气,就会使与水接触的金属腐蚀;在热交换器中若有气体聚集就会妨碍传热过程的进行,降低设备的传热效果。因此水中溶解有任何气体都是不利的,尤其是氧气,它将直接威胁设备的安全运行。 除氧器本身又是给水回热系统中的一个混合式加热器,同时高压加热器的疏水、化学补水及全厂各处水质合格的疏水、排气等均可通入除氧器汇总并加以利用,减少发电厂的汽水损失。当水和某种气体混合物接触时,就会有一部分气体融解到水中去。气体的溶解度就是表示气体溶解于水中的数量,以毫克/升计值,它和气体的种类以及它在水面的分压力、和水的温度有关。在一定的压力下,水的温度越高,气体的溶解度就越小;反之,气体的溶解度就越大。同时气体在水面的分压力越高,其溶解度就越大,反之,其溶解度也越低。天然水中常含有大量溶解的氧气,可达10毫克/升。汽轮机的凝结水可能融有大量氧气,因为空气能通过处于真空状态下的设备不严密部分渗入进去.此外,补充水中也含有氧气及二氧化碳等其他气体。液面上气体混合物的全压力中,包括有液体蒸汽的分压力.将水加热时,液面附近水蒸气的分压力就会增加,相应的液面附近其他气体的分压力就会降低.当水加热到沸点时,蒸汽的分压力就会接近液面上的全压力,此时液面S J E E A G Q I
上其他气体的分压力几乎接近于零,于是这些气体将完全自水中清除出去。要达到这一点,不仅要将水加热到沸点,还要使液面上没有这些气体存在,即将逸出的气体随时排走。除氧器的工作原理即利用蒸汽对水进行加热,使水达到一定压力下的饱和温度,即沸点。这时除氧器的空间充满着水蒸汽,而氧气的分压力逐渐降低为零,溶解于水的氧气将全部逸出,以保证给水含氧量合格。在高参数的电厂,一般采用0.59兆帕的除氧器.这样可以减少价格昂贵而运行不十分可靠的高压加热器的数目,至少可以减少一台。高参数的锅炉给水温度一般为230~250摄氏度。采用高压除氧器,在机组高压加热器故障停用时,进入锅炉的给水温度仍可以维持在150~160摄氏度,这样对锅炉的运行影响就可以小一点。此外,提高锅炉除氧器的压力,可以避免凝结水进入除氧器时产生沸腾现象,后者会使水泵进口产生汽蚀,这对水泵是不允许的。 二、结构介绍 N125-135/550/550型机组采用的除氧器为0.59兆帕、225吨/时的喷雾式除氧器,其结构如图所示。它有两根凝结水进水管3,每根进水管上有21只喷嘴每只喷嘴在进水压降0.098兆帕时,喷水量为6吨/时;另设两根补水管14,每根补水管有10只喷嘴,每只喷嘴在进水压降为0.098兆帕时,喷水量为2吨/时。喷嘴喷出的雾状水滴均向上部空间,与二次蒸汽混合加热,然后被加热的滴落至下部蒸汽喷盘7中。蒸汽也分两路进入除氧器。一路从下部蒸汽管道入口4进入蒸汽喷盘,与头部落下来的水接触,使水受到第二次加热,然后从盘中溢出,流入水S J E E A G Q I
点火系统的组成与工作原理
点火系统的组成与工作原理 一、电控点火系统的类型 1.汽油机点火系统的类型 汽油机点火系主要有:传统点火系统和计算机控制的点火系统两大类型。传统点火系统又可分为磁电机点火系统和蓄电池点火系统。 (1)磁电机点火系统:电能是由磁电机本身提供的,其结构复杂,低速时点火性能差,一般只用于无蓄电池的机动车上。 (2)蓄电池点火系统:又称有触点点火系统,其结构简单、工作可靠,在汽车上得到广泛应用。 蓄电池点火系统的主要缺点: 1)高速易断火,不适合高速发动机。 2)断电器触点易烧蚀,工作可靠性差。 3)点火能量低,点火可靠性差。 (3)微机控制的点火系统:系统中使用模拟计算机根据各传感器信号对点火提前角进行控制。 主要优点: 1)在各种工况及环境条件下,均可自动获得最佳的点火提前角。 2)在整个工作工程中,均可对点火线圈初级回路通电时间和电流进行控制。
3)采用爆燃控制功能后,可使点火提前角控制在爆燃的临界状态。 2.电控点火系统的类型:可分为有分电器和无分电器式。 二、基本组成与工作原理 1.基本组成 电控点火系统一般由电源、传感器、 ECU 、点火器、点火线圈、分电器和火花塞组成。 电控点火系统的基本组成 电源:一般由蓄电池和发电机共同组成,主要是给点火系统提供所需的电能。 传感器:用于检测发动机各种运行参数,为 ECU 提供点火控制所需的信号。 ECU:是电控点火系统的中枢。 点火器:电控点火的执行元件 点火线圈:储存点火所需的能量,并将电源提供的低压电转变为足以在电极间产生击穿火花的 15 ~ 20KV 的高压电。 分电器:根据发动机点火顺序,将点火线圈产生的高压电依次输送给各缸火花塞。
多波束安装步骤
一、系统配置 1、多波束声纳传感器 2、电源线、网线(用于多波束与电脑之间数据传输)、电缆线(连接GPS与RPH至电脑)、USB转串口线2根 3、RPH传感器 4、GPS及天线 5、高配置电脑(100M以上网卡、双核或四核以上、WinXP系统、处理器2.8GHz以上) 6、导航船与安装支架 7、直流电源24V (I max=2A) 二、具体要求 1、连接电源线与网线到多波束装置,用24V直流电源,将网线插到多波束网口里,另一端连至笔记本; 2、将USB转换器插到电脑上获取串口号; 3、将USB转换器与RPH传感器和GPS连在一起; 4、连接RPH电源与GPS电源; 5、第一次运行软件时需配置笔记本的系统配置; 5.1、安装USB转串口驱动 5.2、禁用杀毒软件及无线网络 5.3、禁用省电模式 5.4、配置本地IP:192.168.1.188,子网掩码:255.255.255.0 5.5、配置网络适配器速度为“自动侦测” (设备管理器--网络适配器--属性--高级--连接速度和双工模式--自动侦测) 5.6、使用“msconfig”程序时禁启后台所有任务 (Microsoft System Configuration,系统配置实用程序,“开始”--“运行”--键入“msconfig”--选择要禁用的程序) 5.7、安装好多波束测量软件 6、安装要求 6.1、GPS、RPH、多波束装置竖直方向在一条杆上,三者的三维坐标方向一致,GPS 坐标(Xg,Yg,Zg),换能器坐标(Xt,Yt,Zt),船坐标(X,Y,Z),O为船重心坐标原点; 6.2、Xt=Xg为GPS所在杆与船重心的X向垂直距离;Yt=Yg=0为GPS所在杆与船重心的Y向垂直距离;Zt>0为换能器入水深;Zg<0为GPS到换能器Z向垂直距离;Zc<0表示船重心在水面以上; 7、校准 7.1、对RPH的角误差进行校准 用Patch Test获取或预设一估值; 7.2、对GPS位置进行校准 GPS天线位置相对于换能器位置的偏离值;GPS延时是GPS记录的延时;
锅炉结构及工作原理
锅炉结构及工作原理锅炉结构及工作原理锅:是指锅炉的水汽系统,由汽包、下降管、联箱、水冷壁、过热器和省煤器等设备组成。(1)锅的任务是使水吸热,最后变化成一定参数的过热蒸汽。其过程是:给水由给水泵打入省煤器以后逐渐吸热,温度升高到汽包工作压力的沸点,成为饱和水;饱和水在蒸发设备(炉)中继续吸热,在温度不变的情况下蒸发成饱和蒸汽;饱和蒸汽从汽包引入过热器以后逐渐过热到规定温度,成为合格的过热蒸汽,然后到汽轮机做功。汽包:汽包俗称锅筒。蒸汽锅炉的汽包内装的是热水和蒸汽。汽包具有一定的水容积,与下降管,水冷壁相连接,组成自然水循环系统,同时,汽包又接受省煤器的给水,向过热器输送饱和蒸汽;汽包是加热,蒸发、过热三个过程的分解点。 下降管:作用是把汽包中的水连续不断地送入下联箱,供给水冷壁,使受热面有足够的循环水量,以保证可靠的运行。为了保证水循环的可靠性,下降管自汽包引出后都布置在炉外。 联箱:又称集箱。一般是直径较大,两端封闭的圆管,用来连接管子。起汇集、混合和分配汽水保证各受热面可靠地供水或汇集各受热面的水或汽水混合物的作用。(位于炉排两侧的下联箱,又称防焦联箱)水冷壁下联箱通常都装有定期排污装置。 水冷壁:水冷壁布置在燃烧室内四周或部分布置在燃烧室中间。它由许多上升管组成,以接受辐射传热为主受热面。作用:依靠炉膛的高温火焰和烟气对水冷壁的辐射传热,使水(未饱和水或饱和水)加热蒸发成饱和蒸汽,由于炉墙内表面被水冷壁管遮盖,所以炉墙温度大为降低,使炉墙不致被烧坏。
而且又能防止结渣和熔渣对炉墙的侵蚀;筒化了炉墙的结构,减轻炉墙重量。水冷壁的形式:1.光管式2.膜式 过热器:是蒸汽锅炉的辅助受热面,它的作用是在压力不变的情况下,从汽包中引出饱和蒸汽,再经过加热,使饱和蒸汽成为一定温度的过热蒸汽。 省煤器:布置在锅炉尾部烟道内,利用烟气的余热加热锅炉给水的设备,其作用就是提高给水温度,降低排烟温度,减少排烟热损失,提高锅炉的热效率。 减温装置:保证汽温在规定的范围内。汽温调节:1、蒸汽侧调节(采用减温器)2、烟气侧调节(采用摆动式喷燃器)炉炉就是锅炉的燃烧系统,由炉膛、烟道、喷燃器及空气预热器等组成。工作原理:送风机将空气送入空气预热器中吸收烟气的热量并送进热风道,然后分成两股:一股送给制粉系统作为一次风携带煤粉送入喷煤器,另一股作为二次风直接送往喷煤器。煤粉与一、二次风经喷燃器喷入炉膛集箱燃烧放热,并将热量以辐射方式传给炉膛四周的水冷壁等辐射受热面,燃烧产生的高温烟气则沿烟道流经过热器,省煤器和空气预热器等设备,将热量主要以对流方式传给它们,在传热过程中,烟气温度不断降低,最后由吸风机送入烟囱排入大气。 炉膛:炉膛是由一个炉墙包围起来的,供燃料燃烧好传热的主体空间,其四周布满水冷壁。炉膛底部是排灰渣口,固态排渣炉的炉底是由前后水冷壁管弯曲而形成的倾斜的冷灰斗,液态排渣炉的炉底是水平的熔渣池。炉膛上部是悬挂有屏式过热器,炉膛后上方烟气流出炉膛的通道叫炉膛出口。 空气预热器:是利用锅炉排烟的热量来加热空气的热交换设备。它是装在锅炉尾部的垂直烟道中。
浅水多波束声纳性能解读
浅水多波束声呐在现代水文测量系统中的表现 介绍 根据与美国国家大气和海洋管理局(NOAA)的分支机构——海岸调查办公室的合同,科学应用国际公司(SAIC)在1995年四月至九月期间进行了一次水文调查活动,这是首次采用多波束侧扫声呐。调查活动使用了SAIC的综合水文调查系统(IHSS),该系统集成了一个Reson SeaBat多波束声呐和一个Klein侧扫声呐。 调查活动在Long Island Sound和Martha’s Vineyard附近水深5.5米至60米区域进行。合同的要求包括实现100%多波束覆盖和200%侧扫覆盖;在450侧扫角度,试验测得数据要符合IHO(国际海道测量组织)标准,在更大的可用角度,数据要符合2倍的IHO标准;非交叉轨迹的多波束“脚印”要大于3米;波束间隙不大于m m3 3 ;20m以内水深,空间分辨率小于1m,20-30m水深空间分辨率小于2m,超过30米水深,分辨率下降1%每米。 本文讨论了多波束声呐以及相关传感器和IHSS的选取、配置和校准,使测量满足IHO标准。为了将多波束声呐应用到水文测量,许多事情(波束精度、覆盖、校准器的应用、数据量和吞吐量)都需要讨论。一些实时处理工具被用来修改SAIC的IHSS,文章描述了第一次的调查活动。 多波束声呐的选择 SAIC开发了误差模型和覆盖模型来决定误差容限和描述声呐性能。误差模型是建立在Pohner[1]的工作基础之上的,该模型分析了绘图系统各部分误差以及估计了它们对系统总误差的贡献值。输入到模型的单个传感器误差包括它的位置、姿态、朝向、声速、时间同步、延时。该模型的价值在于能够让个人明白怎样提高单个传感器的精度,从而提高整个系统的性能。覆盖模型控制波形尺寸、波束宽度、船速,以及根据SAIC的调查计划软件制定调查计划。 根据合同要求以及误差模型和覆盖模型的结论,具有双换能器的SeaBat9002多波束声呐被选取。这个选择基于SeaBat的更新速率和测量精度。双换能器的配置允许的最大测量角度1500.此外Reson系统的波束模式是1.50的交叉轨迹,同时可附带1.50、2.40、100的沿迹调查,这使得波束覆盖适合各种深度。在这些调查深度,使用了两个宽带的发射波。波束发射频率1.5Hz--7.5Hz,使得沿迹波束覆盖不会影响调查速度。
除氧器工作原理
[摘要] 除氧器的作用是除去溶于水的含氧,避免锅炉、汽轮机组各系统的金属部件在高温下发生过度的氧化腐 蚀。电厂早期使用淋水盘式除氧器,它对进水温度和负荷要求苛刻,其除氧效果较差,淋水盘的小孔易堵塞。后使用 喷雾填料式除氧器,其除氧效果比淋水盘式除氧器好,但只能除去水中溶解氧的80 %~90 %。新研制的旋膜式除氧 器,进一步强化了传热、传动、传质过程,旋膜式结构保证了“三传”过程的顺利实施,除氧效果较好。 [关键词] 除氧器除氧效果传热传动传质 除氧器功能是:为降低锅炉水中的含氧量,使之达到要求,以保证锅炉、汽轮机组和整个系统的金属部件在高温下不发生过度的氧化腐蚀。国内电厂早期采用淋水盘式除氧器,它对进水温度和负荷要求苛刻,适应能力较差,且淋水盘的小孔易被堵塞。后来很多电厂改用喷雾填料式除氧器。这种除氧器的除氧效果也不理想,溶解氧的合格率一股在65 %左右。于是,后来又研制出泡沸式和旋膜式除氧器,其中,旋膜式除氧器的除氧效果远高于其他型式的除氧器。各类除氧器的除氧效率如表1所示。 1 热除氧原理和条件 目前使用的除氧器均采用热除氧法。除氧原理根据享利定律和道尔顿定律,即在定压下,将水加热至饱和状态。如果液面上气相中凝结气体的分压力小于其平衡压力,气体会在不平衡压差的作用下由水中离析出来。若及时排出不凝结气体,不断破坏其平衡,保持不平衡压差,气体
会不断从水中逸出直至液面上全压力等于水蒸汽压力时,其他气体的分压力趋于0 ,溶于水中的气体全部逸出而除去。因此,热除氧必须具备2 个条件: (1)快速将水加热到相应压力下饱和温度的传热条件; (2)使气体从水中迅速离析并排走的传动、传质条件,2个条件紧密相连。实践表明:条件(1)较易满足;条件(2)是彻底除氧的关键,也是更新除氧器考虑的主要因素。 2 喷雾式除氧器的除氧效果 2. 1 喷雾式除氧器的传热过程 我国目前使用最多的是喷雾式除氧器。在该除氧器中,喷嘴以雾的形式将水喷出,液相雾滴与加热蒸汽接触,因此汽、液相接触面积很大。蒸汽加热雾滴时,属高强度凝结换热,换热系数为1. 3 ×104~1. 5 × 104W/ (m2·℃) ,瞬间可将雾滴加热到饱和温度。此时雾滴中80 %~90 %的溶解气体被离析。 2. 2 喷雾式除氧器内动量与质量的传递 由于雾滴颗粒小、表面张力大,加之气体在雾滴内、外的不平衡压差变小,使雾滴中的剩余气体逸出受阻,不利于深度除氧。为此,所有喷雾式除氧器的下部都加了1层固体填料层、网栅或淋水盘等,使水再分散成极薄的水膜,减小了表面张力,完成深度除氧。但实际效果往往不理想,如珠江电厂4 ×300MW 机组的除氧器,溶解氧的合格率平均 在80 %左右,出水溶氧量波动较大,一般为12~78μg/ L ,长期运行对机组危害很大。在喷雾式除氧器中,由于所喷雾滴很小,表面张力大,只能完成初期除氧的任务。残存在雾滴中的少量气体,因不平衡压差很
除氧器的结构和原理
除氧器的结构和原理 一、除氧器用途:旋膜式除氧器是喷雾填料式除氧器的替代产品,是一种最新型热力式除氧器,旋膜除氧器原理是补水经起膜管呈螺旋状按一定的角度喷出与加热蒸汽进行热交换除氧,给水加热到对应除氧器工作压力下的饱和温度,除去溶解于给水的氧及其它气体,防止和降低锅炉给水管、省煤器和其它附属设备的腐蚀。电力部GB1576-2001《电站压力式除氧器安全技术监察规程》,对除氧器含氧量提出了部颁标准, 即低压大气式除氧器给水含氧量应小于15ц 二、除氧器结构 旋膜式除氧器结构主要是由外壳、旋膜喷管、水篦子、填料液汽网、水箱、汽水分离器等组成: 1. 外壳:是由筒身和冲压随园形封头焊制成。中、小低压除氧器配有一对法兰联接上下部,供装配和检修用,高压除氧器装有供检修的人孔。 2. 旋膜喷管:由水室、汽室、旋膜管、凝结水接管、补充水接管和一次进汽接管组成。新型旋膜器的旋膜管内增加了水膜导向装置,即使低负荷运行时也能强力旋膜,保持良好的水膜裙。 凝结水、化学补水经起膜管呈螺旋状按一定的角度喷出,形成水膜裙,并与一次加热蒸汽接管引进的加热蒸汽进行热交换,形成了一次除氧,给水经过水篦子上升的二次加热蒸汽接触被加热到接近除氧器工作压力下的饱和温度即低于饱和温度2-3℃,并进行粗除氧。一般经此旋膜段可除去给水中含氧量的90-96%左右。 3. 水篦子:是由数层交错排列的角形钢制件组成,经旋膜段粗除氧的给水在这里进行二次分配,呈均匀雨雾状落到装在其下的液汽网上。 4. 填料液汽网:是由许多形状尺寸相同的单元组成的SW型网孔波纹填料,组成的一个圆筒体,该规整填料保持丝网波纹填宵和孔板波纹填料的优点外,而且通量大,压降小、操作弹性大,分离效率高、能耗低,永远不脱落等特点。蓄热填料本身就是二次蒸汽的蓄热器,给水与蓄热器充分热交换,达到了深度除氧的目的,低压大气式除氧器低于10ug/L、高压除氧器低于5ug/L。 5. 水箱:除过氧的给水汇集到除氧头的下部容器即水箱内,除氧水箱内装有最新科学设计的强力换热再沸腾装置,该装置具有强力换热,迅速提升水温,更深度除氧.ɡ/L, 三、除氧器技术特性和配套参数
除氧器除氧原理
除氧器除氧原理 一、给水除氧的任务和方法 除氧器的主要作用:除去锅炉给水中的氧气和其他不凝结气体,防止热力设备腐蚀和传热恶化。 给水系统中的溶解于水的气体来源: 一是补充水带进;二是处于真空状态下的热力设备(凝汽器和部分低压加热器)及管道附件不严密漏入。 给水溶解气体的危害: ①腐蚀热力设备及管道。水中溶解的氧气会对金属材料产生腐蚀;二氧化碳会加快氧腐蚀。给水中溶解0.03mg/L的氧,高温下工作的给水管道及省煤器在短期内会出现穿孔的点状腐蚀。 ②阻碍传热。不凝结气体附在传热面上,以及氧化物沉积形成的盐垢会增大传热热阻。 给水溶氧量指标: ①压力在6Mpa以下的锅炉给水,含氧量小于15μg/L ②压力在6Mpa以上的锅炉给水,含氧量小于7μg/L 二、热力除氧原理 气体在水中的溶解度与气体的种类及该气体在水面的分压力和水的温度有关。 ①在一定压力下,水的温度越高,气体的溶解度越小。 ②气体在水面上的分压力越高,其溶解度就越大。 除氧原理依据亨利定律、道尔顿定律、传热传质定律。 ①亨利定律:在一定温度下,当溶于水中的气体与自水中离析的气体处于动态平衡时,溶于单位容积液体中该气体的质量b,与液面上该气体的分压力Pb成正比,即b=KPb/Po(mg/L) K—该气体的质量溶解度系数 Po—液面上的全压力 当水面上气体的分压力小于溶解该气体所对应的平衡压力时,该气体就会在不平衡压差ΔP作用下,自水中离析出水面,直到新的平衡状态为止。关键是如何使水面上不凝结气体的分压力近似为0。 ②道尔顿定律:混合气体的全压力等于各组成气体的分压力之和。 P=∑Pi +Ps(MPa) 随着水流被蒸汽不断加热,水逐渐蒸发,水表面的水蒸汽压力就逐步增大,其他气体的分压力就逐步减小,水中的气体分子逐渐脱出,并随余汽排出;当水被加热到除氧器工作压力下的饱和温度时,水表面的水蒸汽分压力等于除氧头的压力,也即蒸汽分压力等于总压力,其他气体的分压力近似为0,就可以让水中的各气体完全脱出,水中气体的溶解量接近0。 ③传质定律 气体从水中离析脱出的量与水的表面积A,不平衡压差ΔP成正比例,即G=KmAΔP Km—传质系数或离析系数 除氧过程的两个阶段: ①初期除氧阶段 特点:水中气体较多,不平衡压差ΔP较大,气体以小汽泡的形式逸出。除去80%-90%的气体。 ②深度除氧阶段 特点:水中气体较少,不平衡压差ΔP很小,气体以单个分子的扩散作用离析。可利用加大汽水的接触面积,形成水膜,减小其表面张力或制造蒸汽在水中的鼓泡作用,使气体分子附着在汽泡上逸出。 除氧器(热力除氧器)必须满足的两个条件: 1、亨利定律:当液体表面的某种气体与溶解于液体中该气体处于正比: b=KPb/Po ( mg/L ) 当液面上不凝结气体的分压力一直维持零值,小于水中该溶解气体的平衡压力Pb时,该气体就会在不平衡压力差△P的作用下,自水中离析出来。即要及时将液面上的气体排出,使液面上不凝结气体的分压力近似为零。 2、道尔顿定律:混合气体的全压力等于各组成气体的分压力之和,除氧塔空间的总压力P等于水中所溶解各种气体在水面上不凝结气体的分压力Pi与水面上蒸汽分压力Ps之和,即:P=∑Pi﹢Ps 在除氧器中,将水加热至工作压力下的饱和温度,水逐渐蒸发,水表面的蒸汽压力逐渐增大,近似等于总压力,其它气体的分压力近于或等于零,就可能让水中的各种气体完全析出。
多波束测深系统优势
多波束测深系统优势: 多波束测深系统,是一种多传感器的复杂组合系统,是现代信号处理技术、高性能计算机技术、高分辨显示技术、高精度导航定位技术、数字化传感器技术及其他相关高新技术等多种技术的高度集成。最初的设计构想就是为了提高海底地形测量效率。与传统的单波束测深系统每次测量只能获得测量船垂直下方一个海底测量深度值相比,多波束探测能获得一个条带覆盖区域内多个测量点的海底深度值,实现了从“点—线”测量到“线—面”测量的跨越,其技术进步的意义十分突出。因此多波束测深系统正日益受到海道测量同行的认可,并在实际生产中发挥着越来越重要的作用。 与单波束回声测深仪相比,多波束测深系统具有测量范围大、测量速度快、精度和效率高的优点,它把测深技术从点、线扩展到面,并进一步发展到立体测深和自动成图,特别适合进行大面积的海底地形探测。这种多波束测深系统使海底探测经历了一个革命性的变化,深刻地改变了海洋学领域的调查研究方式及最终成果的质量。 正因为多波束条带测深仪与其它测深方法相比具有很多无可比拟的优点,仅仅近20多年时间,世界各国便开发出了多种型号的多波束测深系列产品。20世纪60年代初开始,相继研制了几种类型的多波束测深系统,最大工作深度200~12000米,横向覆盖宽度可达深度的3倍以上。多波束测深系统同综合卫星定位系统配合,由计算机实时处理标绘等深线图,是70年代末以来海道测量工作的一个突破。时至今日,各个国家生产的多波束又更新换代,横向覆盖宽度可达深度的6倍,波束角可达140°,分辨率可达1cm。 因我国的高精度的水下多波束测量系统正处于研发阶段,尚未有成熟的国产系统,故只能采用进口仪器。 应用领域: 广泛应用于江河、湖泊、沿海水下地形的测量;河道疏浚及港口、码头、桥梁工程的测量;并在沉船、水下物体打捞搜寻方面有着良好的应用,在国家基础经济建设中发挥着越来越重要的作用。 总之,多波束测深系统在水下地形测量中的应用将会日益普及。 综上所述,为了快速准确地提供高精度的江河及沿海水下地形、地貌等资料,满足沿海地区的开发、利用的需要,建议购买多波束测深系统。