汽车车载网络系统
随着汽车技术日新月异的发展,以及电子技术和控制技术在汽车上的大量应用,汽车上采用的电子控制模块越来越多。由原来的几块发展到现在的几十块,显然传统的数据传输方式已不能满足模块间数据传输的要求。新型汽车的控制系统中采用了一种新型的数据传输网络,英文缩写为CAN(ControllerAreaNetwork),其目的是使汽车控制系统的数据传输实现高速化,并使汽车控制系统简单化。新型大众POLO乘用车即采用了这种局城网络控制系统。
一、CAN数据传输系统的组成与工作原理
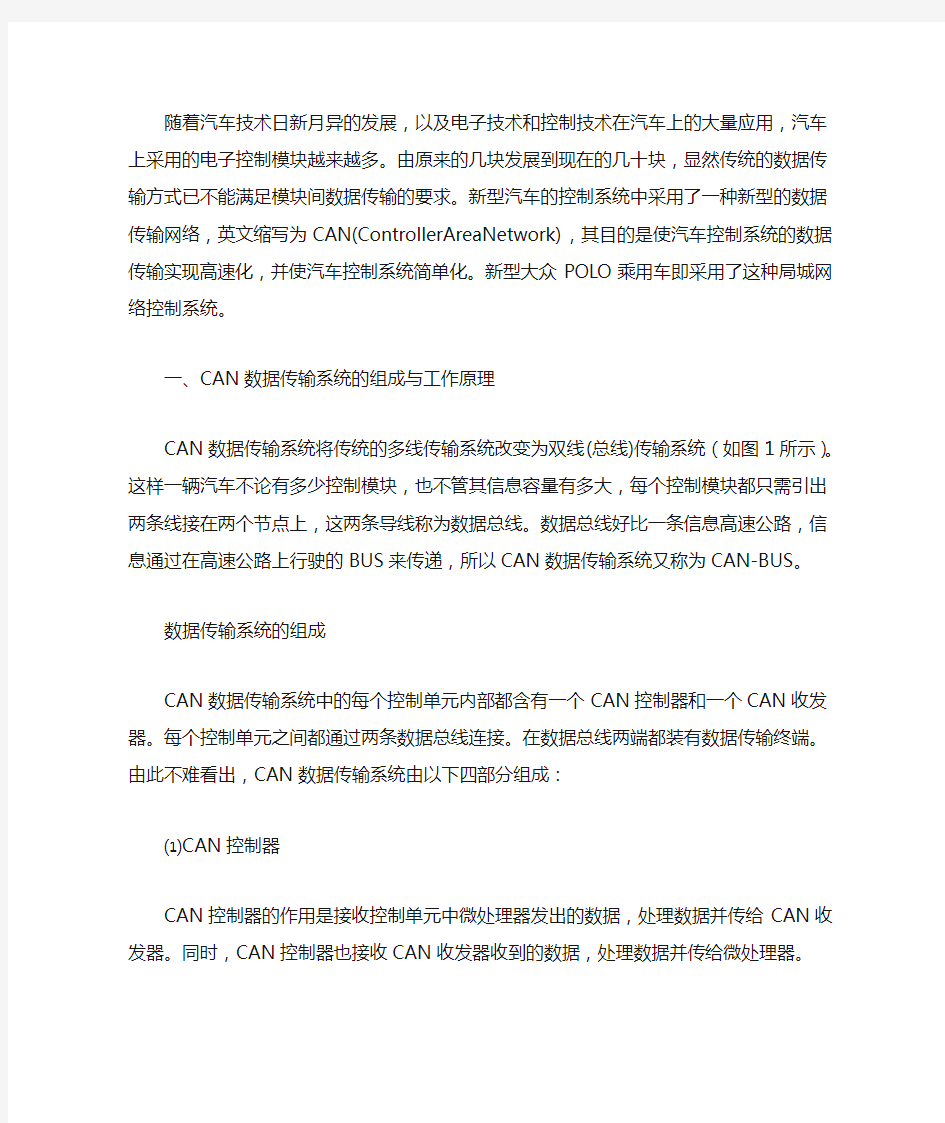
CAN数据传输系统将传统的多线传输系统改变为双线(总线)传输系统(如图1所示)。这样一辆汽车不论有多少控制模块,也不管其信息容量有多大,每个控制模块都只需引出两条线接在两个节点上,这两条导线称为数据总线。数据总线好比一条信息高速公路,信息通过在高速公路上行驶的BUS来传递,所以CAN 数据传输系统又称为CAN-BUS。
数据传输系统的组成
CAN数据传输系统中的每个控制单元内部都含有一个CAN控制器和一个CAN 收发器。每个控制单元之间都通过两条数据总线连接。在数据总线两端都装有数据传输终端。由此不难看出,CAN数据传输系统由以下四部分组成:
⑴CAN控制器
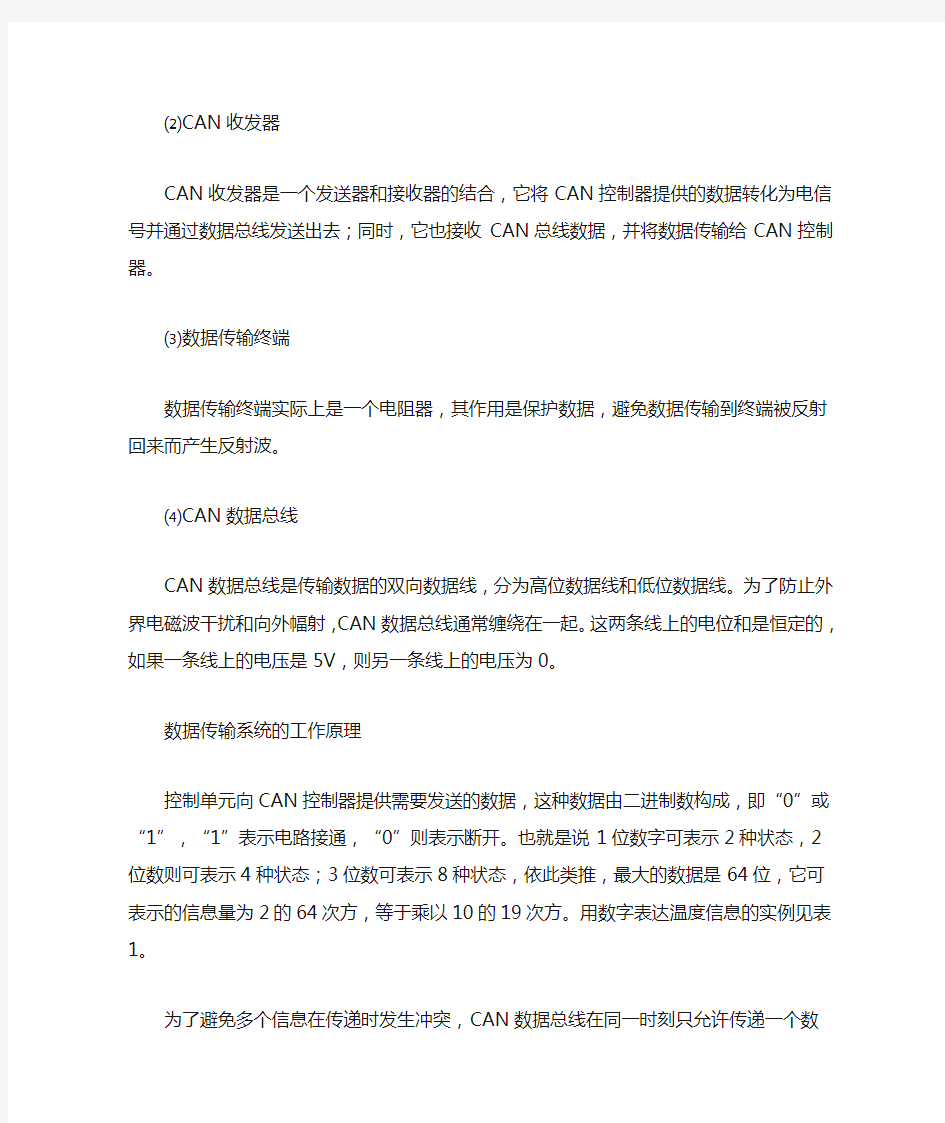
CAN控制器的作用是接收控制单元中微处理器发出的数据,处理数据并传给CAN收发器。同时,CAN控制器也接收CAN收发器收到的数据,处理数据并传给微处理器。
⑵CAN收发器
CAN收发器是一个发送器和接收器的结合,它将CAN控制器提供的数据转化为电信号并通过数据总线发送出去;同时,它也接收CAN总线数据,并将数据传输给CAN控制器。
⑶数据传输终端
数据传输终端实际上是一个电阻器,其作用是保护数据,避免数据传输到终端被反射回来而产生反射波。
⑷CAN数据总线
CAN数据总线是传输数据的双向数据线,分为高位数据线和低位数据线。为了防止外界电磁波干扰和向外幅射,CAN数据总线通常缠绕在一起。这两条线上的电位和是恒定的,如果一条线上的电压是5V,则另一条线上的电压为0。
数据传输系统的工作原理
控制单元向CAN控制器提供需要发送的数据,这种数据由二进制数构成,即“0”或“1”,“1”表示电路接通,“0”则表示断开。也就是说1位数字可表
示2种状态,2位数则可表示4种状态;3位数可表示8种状态,依此类推,最大的数据是64位,它可表示的信息量为2的64次方,等于乘以10的19次方。用数字表达温度信息的实例见表1。
为了避免多个信息在传递时发生冲突,CAN数据总线在同一时刻只允许传递一个数据。数据传递的先后顺序是按数据的优先级别来确定的,具有更高优先级别的数据首先发送,而数据的优先级别是由二进制的11位数值来表示。当多个控制单元同时发送数据时,在数据传输线上由左到右对表示优先级别的11位数字,进行逐一的比较。如果一个控制单元发送了一个低电位(用“1”表示)而检测到一个即将接收的高电位(用“0”表示),那么,该控制单元就停止发送而转变为接收状态;如果一个控制单元向外发送高电位(用“0”表示),而同时,另一个控制单元向外发送低电位(用“1”表示),则数据传输线将体现高电位(用“0”表示)。例如,发动机控制单元要发送的数据为“00101000000”;而自动变速器控制单元要发送的数据为“010********”;ABS控制单元要发送的数据为“00011010000”。
那么,数据传输线将如何传递这些数据呢?首先,第一位均为“0”,数据传输线上也体现为“0”;三个数据的第二位数字,自动变速器控制单元准备向外发送“1”,??0”,因此,自动变速器控制单元,发送了一个低电位(用“1”表示),而接收一个高电位(用“0”表示),那么,自动变速器控制单元将失去优先权,而转为接收状态,数据传输线传送“0”;再比较第三位数字,发动机控制单元准备向外发送“1”,而ABS控制单元准备向外发送“0”,同理,发动机控制单元将失去优先权而转为接收状态,数据传输线传输“0”。
通过比较三个数据的状态域,可以确定ABS控制单元具有最高优先权,从而可以接管数据总线的控制权,该优先权保证其持续发送数据直至发送终了。ABS 控制单元结束发送数据后,因发动机控制单元的优先权高于自动变速器控制单元,所以数据总线的发送次序是:首先发送ABS控制单元数据,然后发送发动机控制单元数据,最后发送自动变速器控制单元数据。
二、大众POLO乘用车CAN数据传输系统的检修
1.大众POLO乘用车的CAN数据传输系统的组成
大众POLO乘用车的CAN数据传输系统由舒适性控制CAN总线、动力控制CAN 总线、车载网络控制和网关等部分组成。
⑴舒适性控制CAN总线
舒适性控制CAN总线系统由车载网络控制单元J559、数据总线的诊断接口J553、电控系统控制单元J255、空调控制单元J301、舒适性系统的中央控制单元J393、驾驶侧车门控制单元J386、前乘客侧车门控制单元J387、左后右后车
门控制单元J388、J389、无线电及导航控制单元组成。其数据传递速率较动力控制系统低,以100kB/s速率传递数据。
⑵动力CAN数据总线
CAN数据传输系统由车载网络控制单元J559、数据总线的诊断接口J533、仪表板控制单元J285以及发动机控制单元、自动变速器控制单元、ABS控制单元、安全气囊控制单元、转向辅助控制单元等组成。
⑶车载网络控制系统
车载网络系统通过控制单元对车辆各种信号进行监测,根椐设定的程序对燃油泵继电器、车内灯光等执行元件进行控制。
⑷网关
网关就是同时连接多种不同数据传递速率的CAN数据总线的电脑,在传递数据时起翻译的作用。也就是说网关将不同速率的数据进行格式转换,变成满足CAN网络要求的数据,放在CAN网络上。大众POLO乘用车的网关电脑与仪表电脑安装在一起。
2.大众POLO乘用车的CAN总线系统的检修
大众POLO乘用车的CAN系统的故障都可以采用最新版本的VAG1551、
VAG1552型检测仪进行检测诊断,现以动力CAN数据总线系统为例予以说明。
大众POLO乘用车的动力CAN数据总线系统逐一连接各控制单元。总线系统需传递的数据有10组,包括发动机控制单元的数据5组、自动变速器控制单元的数据2组、ABS控制单元的数据3组。
故障查询:利用VAG1551、VAG1552型检测仪,分别进入01、02、03地址对发动机、ABS和自动变速器控制单元进行自诊断,再进入功能码02查询三个电控单元是否存储CAN数据传输系统的故障码,动力数据总线故障码见表2。
数据总线系统的故障大多是因短路、断路或CAN高位数据线和CAN低位数据线装混所致,可利用示波器进行检查排除。检查数据传输终端电阻时,应关闭点火开关,拔下发动机控制单元插头,使用万用表测量58针与60针之间的电阻,这就是数据传输终端的电阻值,规值为60~72Ω,如不符合规定应更换发动机控制单元。
车载网络技术考试简答题集
1、请说明CAN数据传输系统的优点主要体现在哪几个方面? 答:数据总线与其他部件组合在一起就成为数据传输系统,CAN数据传输系统的优点是:1.将传感器信号线减至最少,使更多的传感器信号进行高速数据传递。2.电控单元和电控单元插脚最小化应用,节省电控单元的有限空间。3.如果系统需要增加新的功能,仅需软件升级即可。4.各电控单元的监测对所连接的CAN总线进行实时监测,如出现故障该电控单元会存储故障码。5.CAN数据总线符合国际标准,以便于一辆车上不同厂家的电控单元间进行数据交换。 2、说明典型车载网络系统的组成。 答:典型的汽车车载网络系统的结构有ABS模块、动力系统控制模块(PCM)、电子自动温度控制(EATC)、集成控制板(ICP)、虚像组合仪表、照明控制模块(LCM)、驾驶员座椅模块(DSM)、驾驶员车门模块(DDM)、移动电话模块、汽车动态模块。 3、解释CAN、多路传输、数据总线的含义。 答:1).CAN-BUS(控制局域网),是国际上应用最广泛的现场总线之一。最初,CAN被设计作为汽车环境中的微控制器通信,在车载各电控装置ECU之间交换信息,形成汽车电子控制网络。2).数据总线是模块间运行数据的通道,数据总线可以实现在一条数据线上传递的信号可以被多个系统(控制单元)共享,从而最大限度地提高系统整体效率,充分利用有限的资源。如果系统可以发送和接收数据,则这样的数据总线就称之为双向数据总线。3).多路传输用SWS表示,是指在同一通道或线路上同时传输多条信息,事实上,数据信息是依次传输的,但速度非常快,似乎就是同时传输的。4、什么是通信协议?车载网络协议标准有那些? 答:通信协议是指通信双方控制信息交换规则的标准、约定的集合,即指数据在总线上的传输规则。车载网络协议标准有:A类,低速、<10k bit/s、应用于只需传输少量数据的场合,如控制行李箱开启和关闭。B类中速,10~125 Kbit/s、应用于一般的信息传输场合,例如仪表。C类高速,125K~l Mbit/s、应用于更严格的实时控制场合及多媒体控制。D 类高速,高速,>1Mbit/s 、应用于更严格的实时控制场合及多媒体控制。E类高速,>5Mbit/s、应用于车辆被动安全性领域,例如乘员的安全系统。 5、什么是汽车嵌入式系统? 答:汽车电子系统是用传感器、微控制器、执行器、及其他零部件组成的电控系统。汽车电子系统的核心是嵌入式系统。面向被控对象、嵌入到实际应用的系统中、实现嵌入式应用的计算机系统被称为嵌入式计算机系统,简称为嵌入式系统。作为嵌入式系统在汽车上的具体体现,整个汽车电子系统是以ECU为单元,在车载网络技术的连通下构成一个协同控制车辆运行的车载电子控制系统。嵌入式系统的硬件主要包括嵌入式处理器、电源系统、A/D和D/A转换、通信模块等。 7、什么是单片机?MCS-51单片机内部的基本组成及引脚功能? 答:单片机,又称微控制器或嵌入式计算机,是指集成在一个芯片上的微型计算机,也就是把组成微型计算机的各种功能部件,包括CPU、随机存取存储器RAM、只读存储器ROM、基本输入/输出( I/O)接口电路、定时器/计数器等部件制作在一块集成芯片上,构成一个完整的微型计算机,从而实现微型计算机的基本功能。MCS-51是标准的40引脚双列直插式集成电路芯片,它包括(1)电源及时钟引脚(4个),(2)控制线引脚(4个),(3)并行I/O引脚(32个,分成4个8位口)。 8、简要说明CAN数据总线系统的结构和工作原理。 CAN数据总线系统的工作建立在通信协议的基础上, CAN通信协议主要描述各控制单元间的信息传递方式。CAN的模型由数据链路层和物理层组成。各控制单元间的数据传输实际上发生在物理层之间,且各电控单元只通过模型物理层的物理介质互连。CAN最常用的物理介质是双绞线。信号使用差分电压传送,两条信号线被称为CAN-H和CAN-L,即CAN的高位数据线和低位数据线。静态时,两线电压均约为2.5V,此时状态表示为逻辑“1”,也可叫做“隐性”位;工作时,CAN-H比CAN-L高,表示逻辑“0”,称为“显性”位。不管信息量的大小,系统内所有的信息都是通过这两条数据线传输的。 9、简要说明LIN系统的结构和工作原理。 LIN协议在同一总线上的最大节点数量为16,系统中两个电控单元之间的最大距离为40m。LIN网络一般使用一根单独的铜线作为传输介质。一个LIN电控单元拥有一个统一的接口(LIN标准),以便与其他LIN电控单元之间进行信息数据处理。这种接口主要由两部分组成:协议控制器和线路接口。一个LIN电控单元所使用的传输方式与CAN网电控单元所使用的传输方式是相同的,都包括定时传输模式,事件传输模式和混合模式3种。
《汽车车载网络技术》期末复习试题
车载网络复习题 一、填空题 1、多路传输系统可分为单线、双线和无线。 2、通信协议的3要素:语法、语义和定时规则。 3、CAN协议支持两种报文,即标准格式和拓展模式。 4、ECU主要由输入接口、微处理器和输出接口组成。 5、PASSAT轿车动力传动系统的CAN-H线颜色为橙黑。 6、一般而言,照明系统属于车载网络等级标准中的A类网络。 7、LIN总线传输特点是传输速度低、结构简单、价格低廉。 8、我们把同时连接多种不同的CAN数据总线的电脑的模块称为网络。 9、MOST采用物理层传输介质,速率可达24.8mpbs的数据传输速度。 10、车载网络系统的故障类型有汽车电源系统引起的故障、链路故障、节点故障。 11、车载网络系统的故障状态有三种错误激活状态、错误认可状态、总线关闭状态。 12、动力传动系统的优先权顺序为ABS单元→发动机单元→自动变速器单元 13、装有CAN-BUS系统的车辆出现故障,维修人员应首先检测汽车多路信息传输系统是否正常。 14、为了可靠地传输数据,通常将原始数据分割成一定长度的数据单元,这就是数据传输的单元,称其为帧_。 1、汽车多路信息传输系统的节点故障将导致信号干扰。 2、独立模块间数据共享的中速网络采用的是B类网络。 3、接口是为两个系统、设备或部件之间连接服务的数据流穿越的界面。 4、CAN数据总线系统由控制器、收发器、两个数据传输终端和两条数据传输线组成。 5、汽车内ECU之间与办公用微机之间的数据传输特征不尽相同,主要差别在于传输频率。 6、网关实际上是一个模块,他工作的好坏决定了不同的总线、模块和网络相互间通信的好坏。 7、接收器在电路尚未准备好或在间歇域期间检测到一个“0”时,会发送过载帧,以延迟数据的传送。 8、错误标志包括主动错误和被动错误两种类型,它们分别是由6 个连续的“显性位”和“隐性位”组成。 9、为了简化线路,提高各电控单元之间的通信速度,汽车制造商开发设计了车载网络系统。 10、在动力传动系统中,数据传递应尽可能快速,以便能及时利用数据,所以需要一个高性能的发送器。 11、一辆汽车不管有多少块电控单元,不管信息容量有多大,每块电控单元都只需引出两条导线共同接在两个节点上,这两条导线就称作数据总线,又称BUS 线。 1、光在光纤内是基于全反射的原理进行无损耗传输的。 2、奥迪LIN总线系统中唯一与CAN数据总线相连的控制单元是Lin控制单元。 3、丰田多路系统中BEAN通信采用单线传输,CAN和AVC-LAN通信采用双线传输。 4、CAN数据传输线中的两条线绞在一起,主要是为了防干扰,保证数据的正确传输。 5、在新款奥迪车型中,信息系统CAN总线通常被MOST总线代替,用来连接多媒体系统装置。 6、奥迪车系的网络管理工作模式有睡眠和唤醒两种,其中睡眠是为了降低静电流的消耗。 7、车载网络系统就是把众多的电控单元连成网络,其信号通过数据总成的形式传输,可以达到信息资源共享的目的。 8、诊断总线用于诊断系统和相应控制单元之间的信息交换,它被用来代替原来的K线或者L线的功能。 9、诊断总线用于诊断仪器和相应控制单元之间的信息交换,它被用来代替原来的K线或者L线的功能(废气处理控制器除外)。 10、POLO汽车中的燃油供给控制装置,用燃油泵继电器和燃油泵供给继电器并联来代替单个集成防撞燃油关闭装置的燃油继电器。 11、在奥迪车载网络系统中,CAN总线的信息传送通过两个逻辑状态“0”和“1”来实现的,每个逻辑状态都对应一个相应的电压值,控制单元利用两条线上的电压差来确认数据。 1、汽车上常用的网络拓扑形式为总线型网络。 2、LLC子层功能包括接收滤波、超载通知、恢复管理。 3、车载网络分为总线形网、星形网和环形网三种。 4、LAN-BUS常用的拓扑结构有3种:星型、环型、树型。 5、LAN常用的拓扑结构有3种:星形、环形、总线型/树形。
车载网络系统
随着汽车技术日新月异的发展,以及电子技术和控制技术在汽车上的大量应用,汽车上采用的电子控制模块越来越多。由原来的几块发展到现在的几十块,显然传统的数据传输方式已不能满足模块间数据传输的要求。新型汽车的控制系统中采用了一种新型的数据传输网络,英文缩写为CAN(ControllerAreaNetwork),其目的是使汽车控制系统的数据传输实现高速化,并使汽车控制系统简单化。新型大众POLO乘用车即采用了这种局城网络控制系统。 一、CAN数据传输系统的组成与工作原理 CAN数据传输系统将传统的多线传输系统改变为双线(总线)传输系统(如图1所示)。这样一辆汽车不论有多少控制模块,也不管其信息容量有多大,每个控制模块都只需引出两条线接在两个节点上,这两条导线称为数据总线。数据总线好比一条信息高速公路,信息通过在高速公路上行驶的BUS来传递,所以CAN数据传输系统又称为CAN-BUS。 1.CAN数据传输系统的组成 CAN数据传输系统中的每个控制单元内部都含有一个CAN控制器和一个CAN收发器。
每个控制单元之间都通过两条数据总线连接。在数据总线两端都装有数据传输终端。由此不难看出,CAN数据传输系统由以下四部分组成: ⑴CAN控制器 CAN控制器的作用是接收控制单元中微处理器发出的数据,处理数据并传给CAN收发器。同时,CAN控制器也接收CAN收发器收到的数据,处理数据并传给微处理器。 ⑵CAN收发器 CAN收发器是一个发送器和接收器的结合,它将CAN控制器提供的数据转化为电信号并通过数据总线发送出去;同时,它也接收CAN总线数据,并将数据传输给CAN控制器。 ⑶数据传输终端 数据传输终端实际上是一个电阻器,其作用是保护数据,避免数据传输到终端被反射回来而产生反射波。 ⑷CAN数据总线 CAN数据总线是传输数据的双向数据线,分为高位数据线和低位数据线。为了防止外界电磁波干扰和向外幅射,CAN数据总线通常缠绕在一起。这两条线上的电位和是恒定的,如果一条线上的电压是5V,则另一条线上的电压为0。 2.CAN数据传输系统的工作原理 控制单元向CAN控制器提供需要发送的数据,这种数据由二进制数构成,即“0”或“1”,“1”表示电路接通,“0”则表示断开。也就是说1位数字可表示2种状态,2位数则可表示4种状态;3位数可表示8种状态,依此类推,最大的数据是64位,它可表示的信息量为2的64次方,等于1.8乘以10的19次方。用数字表达温度信息的实例见表1。
车载网络试题及答案
6、在奥迪车系的车载网络系统检测中,使用DSO双通道模式和单通道模式进行检测有什么区别? ①二者的接线方式不同,使用DSO双通道模式进行检测时,测出的是CAN-H线和CAN-L线的波形和电压,使用单通道模式进行检测时,测出的是CAN-H线和CAN-L线的电压差。 ②单通道模式主要用于快速查看总线是否为激活状态,不利于故障查询。使用双通道模式更易于对故障进行诊断分析 7、车载网络系统的故障现象有那些? 答:当CAN总线的车辆在出现总线系统故障时,一般表现出来的故障现象会非常离奇,有时车辆上的系统会“群死群伤”、有时从多系统会“瘫痪”。 故障现象有下列三种: (1). 整个网络失效或多个控制单位不工作或工作不正常。 (2). 不同系统、不同地方同时表现出不同的多个故障现象,且故障现象之间没有任何关联。 (3). 个别控制单元无法与诊断仪通信。 8、CAN协议的特点 答:①多主通信;②报文的发出;③系统的灵活性;④通信速度;⑤可要求远程数据;⑥错误检测功能、错误通知功能、错误还原功能;⑦故障的界定;⑧连接。 9、光纤的功能和其特点是什么? 答:光纤的功能是将在某一控制单元发射器内产生的光波传送到另一控制单元的接收器;特点是光波是直线传播的,且不可弯曲,但光波在光纤内必须以弯曲的形式传播;发射器与接收器之间的距离可以达到数米远;机械应力作用(如振动、安装等)不易损坏光纤。在车内温度剧烈变化时应能保证光纤的功能。 10、接口包含那四个方面内容?分别起什么作用? 答:计算机通信接口一般包括4个方面的内容:物理、电气、逻辑和过程。 1)在物理方面,要指出连接器有多少个插脚; 2)在电气方面,要确定接口电路信号的电压、宽度及他们的时间关系; 3)在逻辑方面,包括说明为了传送如何把数据位或字符成字段,以及说明传输控制字符的功能使用等。换句话说,计算机通信接口的逻辑说明,提供了用于控制和实现穿越接口交换数据流的一种语言。 11、蓝牙技术在汽车上的应用有哪些? 答:①当汽车进入服务站时,它的蓝牙站和服务站主计算机建立连接,它和汽车计算机通过蜂窝电话系统交换信息。②服务站主计算机提醒服务人员分配任务,同时他的PC和汽车建立连接,并下载一些需要的信息。③服务人员在其PC上获得必要的工作指示,当给汽车服务时,他可通过PC控制和调节一些功能,如灯、窗户、空气、发动机参数等,也可为任何电子控制单元下载最新版本的软件。 12、汽车网络技术的发展趋势是什么? 答:(1)在汽车中应用迅速普及(2)高速、实时、容错的网络控制技术(3)多媒体、高带宽的网络(4)丰富的软件设计(5)统一网络协议。 六、分析题: 网关信息传输过程如下图图1所示,请根据图来描述一下信息从驱动系统CAN总线到舒适系统CAN总线的传输过程。 答:车外温度由保险杠内的温度传感器传送到仪表板控制单元,仪表板控制单元与驱动系统CAN总线连接。发动机数据(如冷却液温度、发动机转速等)由发动机控制单元测量并提供给驱动系统CAN总线。在网关中驱动系统CAN总线的信息被转换到舒适系统CAN总线上,空调控制单元读取这些信息并将它用于空调的调节。 1、重装操作时将大的数据划分成若干小块,如将报文划分成几个报文分组。(×) 2、舒适CAN数据总线连接5个控制单元,(√) 4、模块就是一种电子装置,节点则不是。(×) 5、模块就是节点,节点就是模块。(×) 6、计算机通信接口一般包括3个方面内容:物理、电气和逻辑。(×) 8、协议可根据其不同特性进行分类,可分为直接型/间接型、单体型/结构化型、对称型/不对称型、标准型/非标准型等。(√) 9、CAN数据总线所传输的数据有数据帧、远程帧、错误帧和过载帧4种类型。(√) 10、一个LIN电控单元所使用的传输方式与CAN网电控单元所使用的传输方式是相同的(√) 11、错误帧由两个不同的域组成,第1个域为不同控制单元提供错误标志的叠加,第2个域是错误界定符。(√) 12、LIN网络一般使用一根单独的铜线作为传输介质。(√) 15.在汽车电子控制系统中,单机或双机通信即可满足实际需要。(×) 16.在主从式多机通信结构中,所有从机通信必须经过主机。(√) 17.在通常的汽车网络结构中,可采用多条不同速率的总线分别连接不同类型的控制单元。(√) 18.多路传输线路比常规线路简单、系统所用导线减少。(√) 19.在汽车单片机局域网中,数据总线相当于各模块间进行信息传输的“高速公路”。(√) 21.CAN-BUS没有总线仲裁技术。当多个节点同时向总线发送信息出现冲突时,会出现网络瘫痪情况。(√) 22.在CAN-BUS数据报文中,把各节点分成不同的优先级。(√) 23.在CAN-BUS总线的汽车网络中,其上的节点数实际是没有限制的。(×) 24.在CAN-BUS的报文中,对信息帧没有检错机制。(×) 25.在CAN-BUS总线中,位速率越高,传输距离越大。(×) 26. 在CAN-BUS总线中,数据传输终端电阻的作用是防止数据在线端被反射。(√) 27.CAN-BUS控制器对各控制单元传输的数据不处理,直接传给CAN收发器。(×) 28. 在双线式总线系统的故障检测中不需要关闭点火开关。(×)
《汽车车载网络技术》期末复习试题
一、填空题 1、多路传输系统可分为单线、双线和无线。 2、通信协议的3要素:语法、语义和定时规则。 3、CAN协议支持两种报文,即标准格式和拓展模式。 4、ECU主要由输入接口、微处理器和输出接口组成。 5、PASSAT轿车动力传动系统的CAN-H线颜色为橙黑。 6、一般而言,照明系统属于车载网络等级标准中的A类网络。 7、LIN总线传输特点是传输速度低、结构简单、价格低廉。 8、我们把同时连接多种不同的CAN数据总线的电脑的模块称为网络。 9、MOST采用物理层传输介质,速率可达的数据传输速度。 10、车载网络系统的故障类型有汽车电源系统引起的故障、链路故障、节点故障。 11、车载网络系统的故障状态有三种错误激活状态、错误认可状态、总线关闭状态。 12、动力传动系统的优先权顺序为ABS单元→发动机单元→自动变速器单元 13、装有CAN-BUS系统的车辆出现故障,维修人员应首先检测汽车多路信息传输系统是否正常。 14、为了可靠地传输数据,通常将原始数据分割成一定长度的数据单元,这就是数据传输的单元,称其为帧_。 1、汽车多路信息传输系统的节点故障将导致信号干扰。 2、独立模块间数据共享的中速网络采用的是B类网络。 3、接口是为两个系统、设备或部件之间连接服务的数据流穿越的界面。 4、CAN数据总线系统由控制器、收发器、两个数据传输终端和两条数据传输线组成。 5、汽车内ECU之间与办公用微机之间的数据传输特征不尽相同,主要差别在于传输频率。 6、网关实际上是一个模块,他工作的好坏决定了不同的总线、模块和网络相互间通信的好坏。 7、接收器在电路尚未准备好或在间歇域期间检测到一个“0”时,会发送过载帧,以延迟数据的传送。 8、错误标志包括主动错误和被动错误两种类型,它们分别是由6 个连续的“显性位”和“隐性位”组成。 9、为了简化线路,提高各电控单元之间的通信速度,汽车制造商开发设计了车载网络系统。 10、在动力传动系统中,数据传递应尽可能快速,以便能及时利用数据,所以需要一个高性能的发送器。 11、一辆汽车不管有多少块电控单元,不管信息容量有多大,每块电控单元都只需引出两条导线共同接在两个节点上,这两条导线就称作数据总线,又称BUS 线。 1、光在光纤内是基于全反射的原理进行无损耗传输的。 2、奥迪LIN总线系统中唯一与CAN数据总线相连的控制单元是Lin控制单元。 3、丰田多路系统中BEAN通信采用单线传输,CAN和AVC-LAN通信采用双线传输。 4、CAN数据传输线中的两条线绞在一起,主要是为了防干扰,保证数据的正确传输。 5、在新款奥迪车型中,信息系统CAN总线通常被MOST总线代替,用来连接多媒体系统装置。 6、奥迪车系的网络管理工作模式有睡眠和唤醒两种,其中睡眠是为了降低静电流的消耗。 7、车载网络系统就是把众多的电控单元连成网络,其信号通过数据总成的形式传输,可以达到信息资源共享的目的。 8、诊断总线用于诊断系统和相应控制单元之间的信息交换,它被用来代替原来的K线或者L线的功能。 9、诊断总线用于诊断仪器和相应控制单元之间的信息交换,它被用来代替原来的K线或者L线的功能(废气处理控制器除外)。 10、POLO汽车中的燃油供给控制装置,用燃油泵继电器和燃油泵供给继电器并联来代替单个集成防撞燃油关闭装置的燃油继电器。 11、在奥迪车载网络系统中,CAN总线的信息传送通过两个逻辑状态“0”和“1”来实现的,每个逻辑状态都对应一个相应的电压值,控制单元利用两条线上的电压差来确认数据。 1、汽车上常用的网络拓扑形式为总线型网络。 2、LLC子层功能包括接收滤波、超载通知、恢复管理。 3、车载网络分为总线形网、星形网和环形网三种。 4、LAN-BUS常用的拓扑结构有3种:星型、环型、树型。 5、LAN常用的拓扑结构有3种:星形、环形、总线型/树形。 6、汽车网络中的有线通信介质可为双绞线、同轴电缆或光纤。 7、汽车网络拓扑结构常见有星型、总线型、环型和树型网络。
汽车车载网络技术期末复习题
汽车车载网络技术期末 复习题 公司内部编号:(GOOD-TMMT-MMUT-UUPTY-UUYY-DTTI-
车载网络复习题 一、填空题 1、多路传输系统可分为单线、双线和无线。 2、通信协议的3要素:语法、语义和定时规则。 3、CAN协议支持两种报文,即标准格式和拓展模式。 4、ECU主要由输入接口、微处理器和输出接口组成。 5、PASSAT轿车动力传动系统的CAN-H线颜色为橙黑。 6、一般而言,照明系统属于车载网络等级标准中的A类网络。 7、LIN总线传输特点是传输速度低、结构简单、价格低廉。 8、我们把同时连接多种不同的CAN数据总线的电脑的模块称为网络。 9、MOST采用物理层传输介质,速率可达的数据传输速度。 10、车载网络系统的故障类型有汽车电源系统引起的故障、链路故障、节点故 障。 11、车载网络系统的故障状态有三种错误激活状态、错误认可状态、总线关闭状态。 12、动力传动系统的优先权顺序为ABS单元→发动机单元→自动变速器单元 13、装有CAN-BUS系统的车辆出现故障,维修人员应首先检测汽车多路信息传输系统是否正常。 14、为了可靠地传输数据,通常将原始数据分割成一定长度的数据单元,这就是数据传输的单元,称其为帧_。 1、汽车多路信息传输系统的节点故障将导致信号干扰。 2、独立模块间数据共享的中速网络采用的是B类网络。
3、接口是为两个系统、设备或部件之间连接服务的数据流穿越的界面。 4、CAN数据总线系统由控制器、收发器、两个数据传输终端和两条数据传输线组成。 5、汽车内ECU之间与办公用微机之间的数据传输特征不尽相同,主要差别在于传输频率。 6、网关实际上是一个模块,他工作的好坏决定了不同的总线、模块和网络相互间通信的好坏。 7、接收器在电路尚未准备好或在间歇域期间检测到一个“0”时,会发送过载 帧,以延迟数据的传送。 8、错误标志包括主动错误和被动错误两种类型,它们分别是由6 个连续的“显性位”和“隐性位”组成。 9、为了简化线路,提高各电控单元之间的通信速度,汽车制造商开发设计了车载网络系统。 10、在动力传动系统中,数据传递应尽可能快速,以便能及时利用数据,所以需要一个高性能的发送器。 11、一辆汽车不管有多少块电控单元,不管信息容量有多大,每块电控单元都只需引出两条导线共同接在两个节点上,这两条导线就称作数据总线,又称BUS 线。 1、光在光纤内是基于全反射的原理进行无损耗传输的。 2、奥迪LIN总线系统中唯一与CAN数据总线相连的控制单元是Lin控制单元。 3、丰田多路系统中BEAN通信采用单线传输,CAN和AVC-LAN通信采用双线传输。
汽车车载网络系统检修(第2版)—习题答案
第1章车载网络系统基础知识 习题答案 1.按照你的理解,说一说汽车为什么要使用网络系统? 答案要点:很多汽车采用了多个电控系统,如果每一个电控系统都独立配置一整套相应的传感器、执行器,势必造成导线、插接件数量的不断增多,使得在有限的汽车空间内布线越来越困难,线束和插接件的增加使得汽车维修人员对车辆进行故障诊断和维修的难度增加;同时油耗增加,成本提高。为了提高汽车综合控制的准确性,控制系统也迫切需要输入、输出信号/数据共享。当电控模块共享输入信息时,就能对汽车进行更为复杂的控制。 为了简化线路,提高各电控单元之间的通信速度,汽车制造商开发设计了新的总线系统,即车载网络系统,把众多的电控单元连成网络,其信号通过数据总线的形式传输,可以达到信息资源共享的目的。 2.说明典型车载网络系统的组成。 答案要点:通常汽车网络结构采用多条不同速率的总线分别连接不同类型的节点,并使用网关服务器来实现整车的信息共享和网络管理。 3.车载网络系统在汽车上的应用有哪些? 答案要点:车载网络系统在汽车上的应用非常多,按照应用系统加以划分的话,车用网络大致可以分为4个系统:动力传动系统、车身系统、安全系统、信息系统。 4.解释CAN、多路传输、数据总线的含义。 答案要点:CAN(Controller Area Network,控制局域网),是国际上应用最广泛的现场总线之一。最初,CAN被设计作为汽车环境中的微控制器通信,在车载各电控装置ECU之间交换信息,形成汽车电子控制网络。 多路传输用SWS(Smart Wiring System)表示,是指在同一通道或线路上同时传输多条信息。事实上,数据信息是依次传输的,但速度非常快,似乎就是同时传输的。 数据总线是模块间运行数据的通道,即所谓的信息高速公路。数据总线可以实现在一条数据线上传递的信号可以被多个系统(控制单元)共享,从而最大限度地提高系统整体效率,充分利用有限的资源。 5.什么是通信协议?常用的通信协议有哪些? 答案要点:通信协议是指通信双方控制信息交换规则的标准、约定的集合,即指数据在总线上的传输规则。 常用的通信协议有:CAN、BASIC CAN、ABWS、VAN、HBCC、PALMENT、DLCS、CCD 等。
车载网络技术考试简答题集
1、请说明数据传输系统的优点主要体现在哪几个方面?答:数据总线与其他部件组合在一起就成为数据传输系统,数据传输系统的优点是:1.将传感器信号线减至最少,使更多的传感器信号进行高速数据传递。2.电控单元和电控单元插脚最小化应用,节省电控单元的有限空间。3.如果系统需要增加新的功能,仅需软件升级即可。4.各电控单元的监测对所连接的总线进行实时监测,如出现故障该电控单元会存储故障码。5数据总线符合国际标准,以便于一辆车上不同厂家的电控单元间进行数据交换。 2、说明典型车载网络系统的组成。答:典型的汽车车载网络系统的结构有模块、动力系统控制模块()、电子自动温度控制()、集成控制板()、虚像组合仪表、照明控制模块()、驾驶员座椅模块()、驾驶员车门模块()、移动电话模块、汽车动态模块。 3、解释、多路传输、数据总线的含义。答:1)(控制局域网),是国际上应用最广泛的现场总线之一。最初,被设计作为汽车环境中的微控制器通信,在车载各电控装置之间交换信息,形成汽车电子控制网络。2).数据总线是模块间运行数据的通道,数据总线可以实现在一条数据线上传递的信号可以被多个系统(控制单元)共享,从而最大限度地提高系统整体效率,充分利用有限的资源。如果系统可以发送和接收数据,则这样的数据总线就称之为双向数据总线。3).多路传输用表示,是指在同一通道或线路上同时传输多条信息,事实上,数据信息是依次传输的,但速度非常快,似乎就是同时传输的。 4、什么是通信协议?车载网络协议标准有那些?答:通信协议是指通信双方控制信息交换规则的标准、约定的集合,即指数据在总线上的传输规则。车载网络协议标
准有:A类,低速、<10k 、应用于只需传输少量数据的场合,如控 制行李箱开启和关闭。B类中速,10~125 、应用于一般的信息传输场合,例如仪表。C类高速,125K~l 、应用于更严格的实时控制场合及多媒体控制。D类高速,高速,>1 、应用于更严格的实时控制 场合及多媒体控制。E类高速,>5、应用于车辆被动安全性领域,例如乘员的安全系统。5、什么是汽车嵌入式系统?答:汽车电子系统是用传感器、微控制器、执行器、及其他零部件组成的电控系统。汽车电子系统的核心是嵌入式系统。面向被控对象、嵌入到实际应用的系统中、实现嵌入式应用的计算机系统被称为嵌入式计算机系统,简称为嵌入式系统。作为嵌入式系统在汽车上的具体体现,整个汽车电子系统是以为单元,在车载网络技术的连通下构成一个协同控制车辆运行的车载电子控制系统。嵌入式系统的硬件主要包括嵌入式处理器、电源系统、和转换、通信模块等。7、什么是单片机?51单片机内部的基本组成及引脚功能?答:单片机,又称微控制器或嵌入式计算机,是指集成在一个芯片上的微型计算机,也就是把组成微型计算机的各种功能部件,包括、随机存取存储器、只读存储器、基本输入/ 输出( )接口电路、定时器/计数器等部件制作在一块集成芯片上,构 成一个完整的微型计算机,从而实现微型计算机的基本功能。51是 标准的40引脚双列直插式集成电路芯片,它包括(1)电源及时钟引脚(4个),(2)控制线引脚(4个),(3)并行引脚(32个,分成4个8位口)。8、简要说明数据总线系统的结构和工作原理。数据总线系统 的工作建立在通信协议的基础上,通信协议主要描述各控制单元间
车载网络系统
项目 车载网络系统 汽车上电子控制单元及电子元件越来越多,其电子控制技 术包括燃油喷射系统,自动变速器,安全气囊,动力转向, 电控悬架系统等。这些通讯系统之间的通讯和数据的共享, 如果采用传统的布线的方式,会使得汽车上电线的数目急剧 增加。大多数汽车使用了网路控制技术。 本项目知识目标: 1.了解车载网路在汽车上的应用及发展。 2.了解车载网络的基本术语。 本项目能力目标: 1、掌握车载网络的基本组成。 2、熟练掌握大众车系的车载网络的构成特点。 概述 随着现代科技的飞速发展,汽车装备日趋完善,车用电气设 备越来越多,从发动机控制到传动系统控制, 从行驶、制动、 转向系统控制到安全保证系统及仪表报警系统,从电源管理 到为提高舒适性而作的各种努力,使汽车电气系统形成一个 复杂的大系统,如果按照常规点到点的布线法,则整个汽车 的布线将十分复杂,显得很凌乱。尤其是在高档客车中,传 统布线不仅增加了布线的复杂程度,而且布线所需的铜线也将成倍增加。为了解决车内可用空间与粗大线束之间的矛盾,人们将车载网络技术应用于汽车上。 1、汽车电子技术的发展? 2、发动机电子控制技术的发展? 3、变速器电子控制技术的发展? 一、车载网络的发展 随着汽车三大系统(动力系统、舒适系统、信息娱 乐系统)中各种电控系统的不断增加,汽车电气系统形 成一个复杂的大系统,并且都集中在驾驶室控制。从布 线角度分析,传统的电气系统大多采用点对点的单一通 信方式,相互之间少有联系,这样会有庞大的布线系统。 然而,驾驶室的空间是有限的,这样必然造成庞大线束 与驾驶室内可用空间之间的矛盾。 20世纪80年代末的汽车工业中,由于消费者对于汽车功能的要求越来越多,而这些功能的实现大多是基于电子操作的,这就使得电子装置之间的通信