FANUCMiA视觉系统教程
上汽集团
临港机器人视觉系统iRVision 操作手册
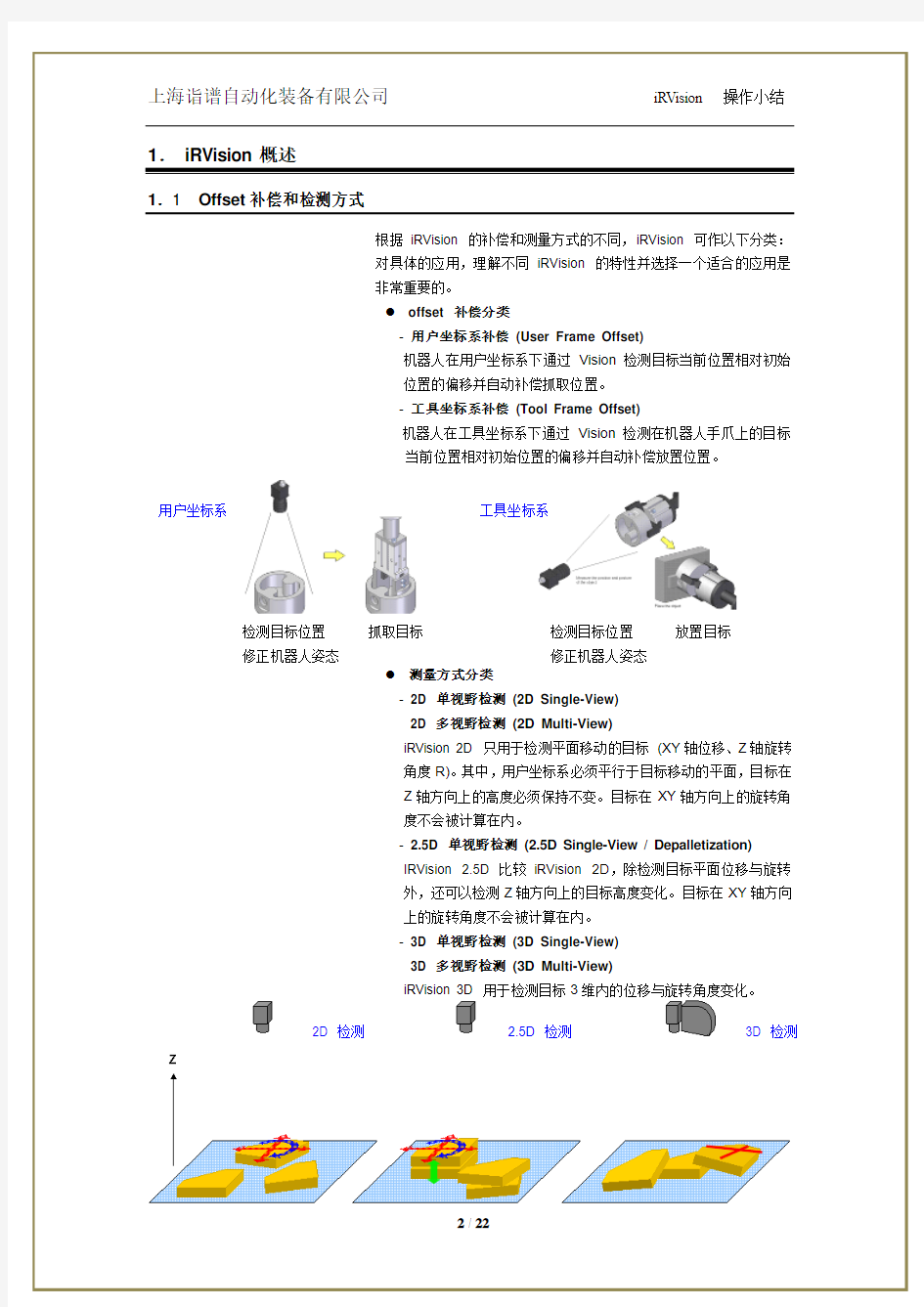
工具坐标系
2D 检测 2.5D 检测3D 检测
使用精度高的三爪卡盘和唯一的针以针顶端为原点设置TCP 改变机器人姿态,调整手爪方向性确认
响
Application
User Frame
3 设置照相机(Camera Setup)
,新建一个照相机。
界面。点击进行连续成像。查看视野内是否能有效观测
进行一次成像,观H
进行一次成像,观
选择一个明显可见的目
标作为成像对象
Snap Image:
(row, col, g):
行、列、灰度
,点击,新建一个标定。
确认,双击建立的标定或点击
进行一次
,点击,新建一个标定。
度左右。点击
7) 如果选择双板标定,示教机器人使栅格板置于照相机视野中,示教机器人高度低于最佳成像高度H 50mm ,点击
进行一次成像,
在1#Plane 中点击 [Find],将栅格板成像用红框围绕起来,点击[OK] 确认。示教机器人高度高于最佳高度50mm ,点击
进行一
次成像,在2#Plane 中点击 [Find],将栅格板成像用红框围绕起
来,点击 [OK] 确认。点击[Set Frame],完成标定。
30°
1#Plane
,点击,新建一个标定。
进行连续成像,点击
打开激光,示教机器人使栅格板中心、屏幕中
7) 点击[Point] 选项,核对是否有和实际点位误差较大的点
(Err>0.5),如有,在Point Number内填写需要删除的点,点击
注意事项:
●正确设置应用用户坐标系,确认应用用户坐标系的
目标移动平面平行。正确设置照相机,确认照相机的光轴与应
用用户坐标系垂直。应用用户坐标系的
3.5 视觉程序示教
,新建一个标定。
4) 根据不同的应用形式,选择对应的偏移方式,完成以下设置。5) 选择目标的成像面,测量目标成像面与应用用户坐标系间距离对复数以上的目标,在 [Ref. Date Index to Use] 点击新建一个Model ,进行同样的设置。
Model ID :模型标识 Part Z Height :目标Z 高度Simple 2-D ,此项不可设应用用户坐标系h B
左右,点击
7) 点击 [Set Origin],设置目标原点(非必须),点击 [Edit Trn. Mask],进行特征的选取,利用工具栏将无效特征以红色区域覆盖以去除,有效特征的选择尽量选择目标的棱边等明显特征,特征所在平面必须与步骤5所述成像面一致,完成后点击 [OK] 确认。
无效特征区域
应用用户坐标系
X-Y 平面 Z
成像面 h
高度不一致 无效特征
高度一致 有效特征
目标原点投影成像
9) 调整各项设置参数使iRVision可以有效识别目标,如不能识别,
勾选Show Almost Found,根据识别结果调整参数,完成如下设置。详细参数设置请参考相关手册。
默认-180°~+180°
Scale:比例范围默认90%~110%
Aspect Ratio:失真范围默认90%~100%
9) 点选树形列表总目录2D Single-View
[Snap and Find],确认iRVision识别目标完成,点击
Pos.],核对Reference Position,
存盘。
3.5.2 2D多视野(2D Multi-View)
,新建一个标定。