快速灰度投影稳像算法研究
第28卷第8期 兵工自动化 Vol. 28, No. 8 2009年8月 Ordnance Industry Automation Aug. 2009
·88·
doi: 10.3969/j.issn.1006-1576.2009.08.031
快速灰度投影稳像算法研究
周亚军,王翔,苏享,姚志龙,姚春柱
(解放军炮兵学院 信息化弹药研发中心,安徽 合肥 230031)
摘要:为提高灰度投影稳像算法的速度,提出一种等间隔快速投影算法:参考帧图像每行(列)进行投影,待稳定帧图像的投影区域进行等间隔行(列)投影,所有的投影行(列)内等间隔取像素值,将2帧图像的投影曲线进行遍历相关运算,得出图像的运动矢量。通过分析相关曲线,得出其单峰性的特点。实验结果表明,该算法可保持传统灰度投影算法的稳像精度,运算量显著减小,计算速度大大提高。
关键词:电子稳像;灰度投影;快速投影;快速搜索 中图分类号:TP301.1; TP391.9 文献标识码:A
Research on Fast Gray Projection Algorithm for Image Stabilization
ZHOU Ya-jun, WANG Xiang, SU Xiang, YAO Zhi-long, YAO Chun-zhu
(Informational Ammunition Research & Developing Center, Artillery Academy of PLA, Hefei 230031, China) Abstract: In order to accelerate gray projection and image stabilization algorithm, put forward a uniformly-spaced allegro algorithm: project each column (row) of the reference frame image, and process uniformly-spaced column (row) projections among the proposed stable frames’ projection area. Fetch pixel value among equal intervals of all projection columns (rows). Put up ergodic operations of the two frame images’ projection curve, thus obtain moving vectors of the image. Then through analyzing relation curve, find its features of unimodality. Experiment result shows the algorithm can keep precision of traditional algorithm, while can simplify and accelerate the calculation. Keywords: Electronic image stabilization; Gray projection; Fast projection; Fast search
0 引言
电子稳像(Electronic image stabilization -EIS )通过检测并补偿图像帧间运动矢量,来减缓甚至消除图像序列的抖动。运动矢量的检测是电子稳像的关键环节,目前的主要算法有:灰度投影法[1]、块
匹配算法[2-3]、位平面匹配法[4]、特征跟踪法[5-6]等。快速搜索算法只用在矢量检测相关运算中,全局搜索的运算量不大,快速搜索算法对提高估算速度不明显。故提出等间隔快速投影算法,在保持传统灰度投影算法的稳像精度的基础上,使计算速度提高。
1 快速灰度投影
1.1 传统灰度投影
灰度投影就是将经过滤波预处理后的每一帧M ×N 图像的二维灰度信息映射成2个独立的一维投影序列。计算公式如下:
1()(,)n
k k y G x G x y ==∑ (1)
∑==m
x k k y x G y G 1
),()( (2)
其中:m 、n 分别是图像投影区域的宽度、高度;G k (x ,y )为第k 帧图像(x ,y )上位置处的像素灰度值;
G k (x )为该图像第x 列的灰度投影值;G k (y )为该图像
第y 行的灰度投影值。
传统灰度投影中参考帧和待稳定图像的投影区域相同,且通常采用全投影,即将投影区域每行(列)进行映射,行(列)内的每个像素都参与投影。 1.2 快速灰度投影算法
相邻像素具有灰度相似性,在灰度投影计算时,取小区域内一个像素值,可代表这块小区域的灰度特征。就可减小运算量,加快灰度投影的速度,而不影响稳像精度。等间隔投影就是简单有效的方法。由于行、列的投影相关计算类似,现以列投影为例来说明图像快速灰度投影及其计算的过程。
等间隔投影算法要求采用遍历运算才可得到准确的运动矢量,否则会影响矢量的估算精度。参考帧图像所有列投影,每列内等间隔取像素值。间隔不宜过大,以免图像信息损失过多,取3~5个像素。
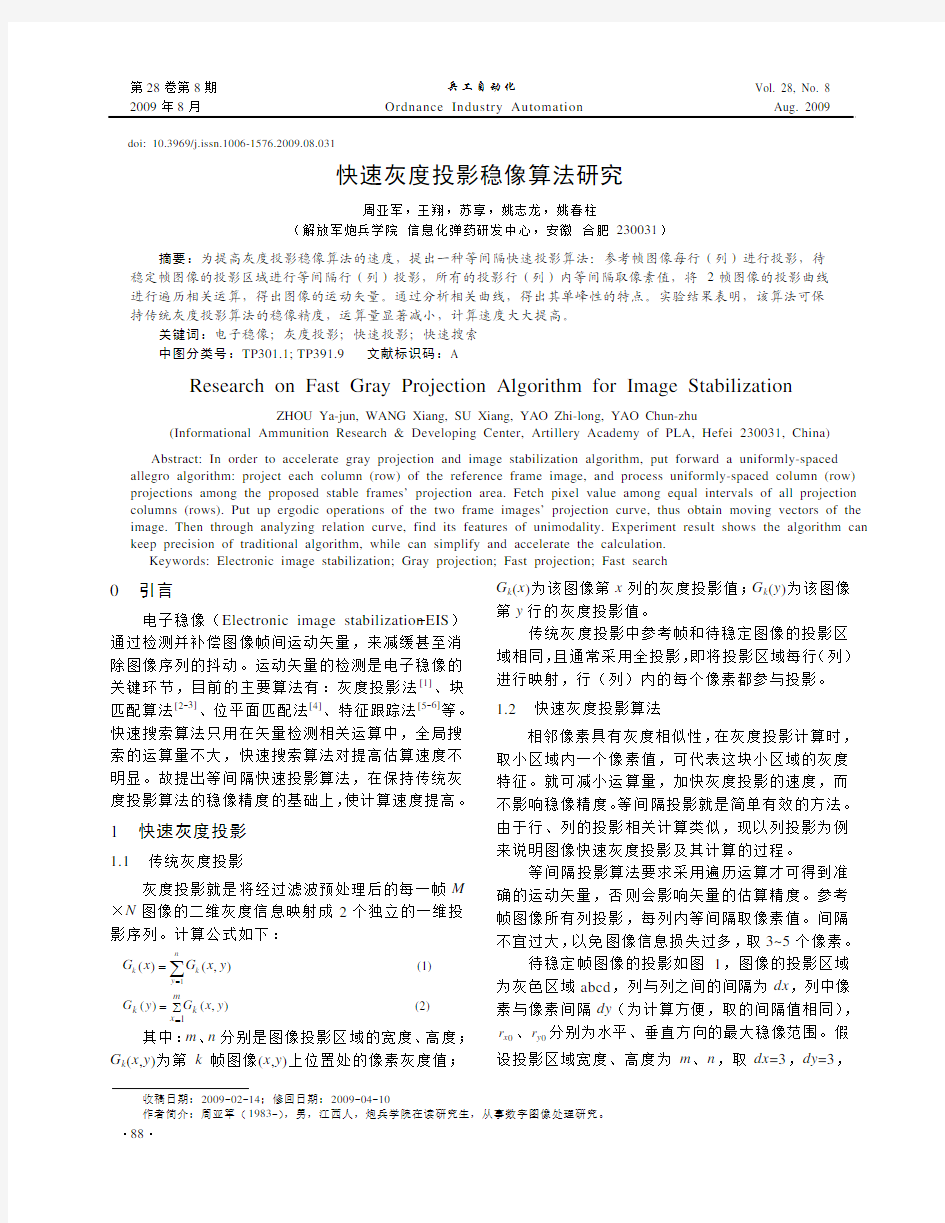
待稳定帧图像的投影如图1,图像的投影区域为灰色区域abcd ,列与列之间的间隔为dx ,列中像素与像素间隔dy (为计算方便,取的间隔值相同),0x r 、0y r 分别为水平、垂直方向的最大稳像范围。假设投影区域宽度、高度为m 、n ,取dx =3,dy =3,
收稿日期:2009-02-14;修回日期:2009-04-10 作者简介:周亚军(1983-),男,江西人,炮兵学院在读研究生,从事数字图像处理研究。
周亚军,等:快速灰度投影稳像算法研究
·89·
则列的灰度投影计算公式为:
/3
0000(3)(33)n k x k x y y G x r G x r y r =+=++∑, (3)
式中:0≤x ≤/3m ,0≤y ≤n /3;)3,3(00y x k r y r x G ++为第k 帧图像投影区域在)3,3(00y x r y r x ++上位置处的像素灰度值;)3(0x k r x G +为该区域第03x r x +列的灰度投影值。
图1 待稳定帧图像的列灰度投影
1.3 位移相关检测
将第k 帧图像投影区域和参考帧图像的相应位置的列灰度投影值做遍历相关计算,找到最小相关
值,即可确定当前帧图像相对于参考帧图像的水平
位移矢量值。式 (3) 中列相关运算的计算公式为:
/3
000()|(3)(3)|m k x x C j G x j G x r ==+?+∑ )20(0x r j ≤≤ (4)
式中:0()G x 、()k G x 分别是参考帧图像第x 列和第k 帧图像投影区域第x 列的灰度投影值;m 是
第k 帧图像投影区域的宽度。
设j min 为C ( j )值最小时j 的值,则第k 帧图像相对于参考帧图像在水平方向的位移矢量为: min 0j r x x ?=Δ
(5) 得到水平方向的位移矢量后,当前图像反方向运动该矢量的距离,就可实现图像序列的稳定。
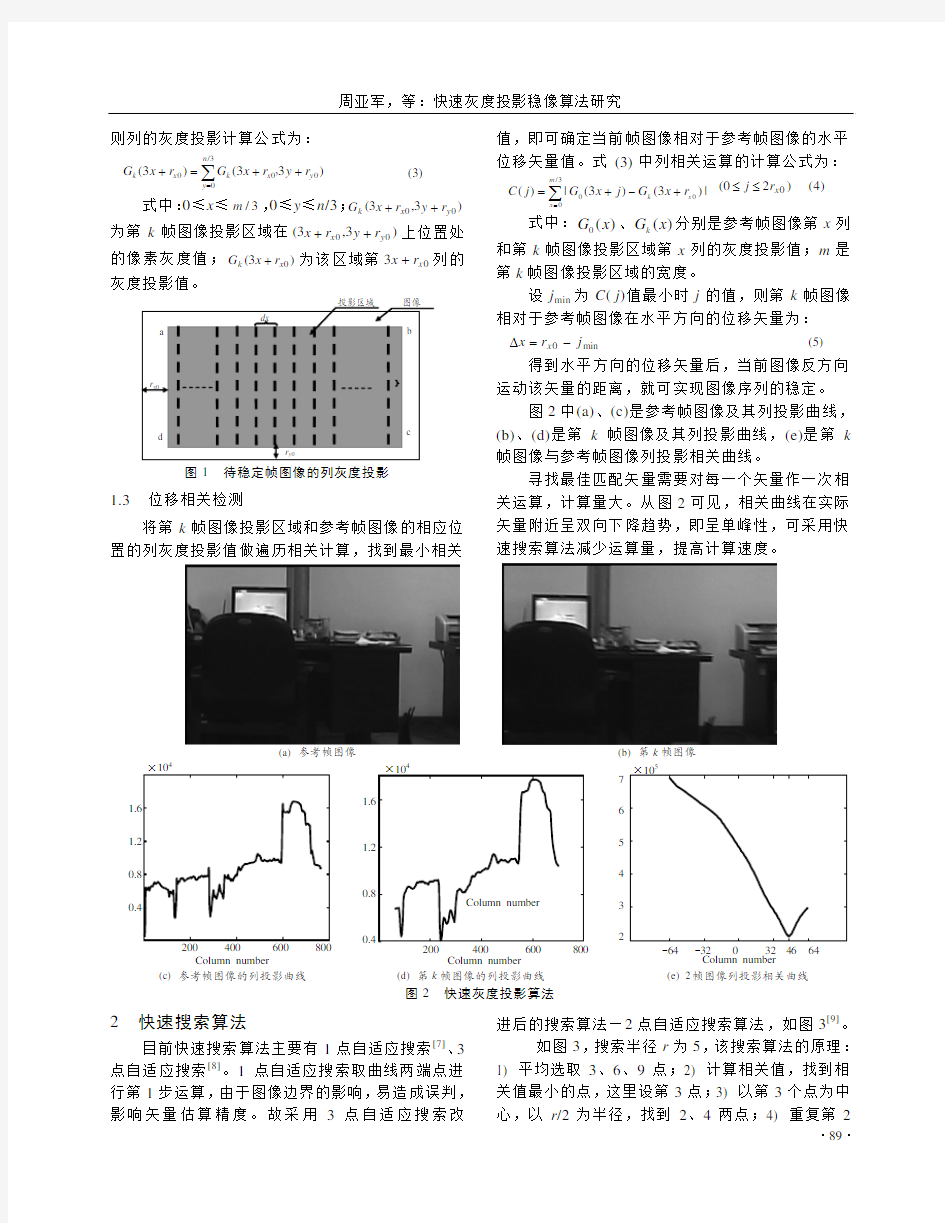
图2中(a)、(c)是参考帧图像及其列投影曲线,(b)、(d)是第k 帧图像及其列投影曲线,(e)是第k
帧图像与参考帧图像列投影相关曲线。
寻找最佳匹配矢量需要对每一个矢量作一次相关运算,计算量大。从图2可见,相关曲线在实际矢量附近呈双向下降趋势,即呈单峰性,可采用快速搜索算法减少运算量,提高计算速度。
(a) 参考帧图像 (b) 第k 帧图像
4
V a l u e o f g r a y p r o j e c t i o n
Column number 200 400 600 8001.6 1.2
0.8
0.4
×104
Column number
V a l u e o f g r a y p r o j e c t i o n
Column number -64 -32 0 32 46 64
76543
2×105
(c) 参考帧图像的列投影曲线 (d) 第k 帧图像的列投影曲线 (e) 2帧图像列投影相关曲线
图2 快速灰度投影算法
2 快速搜索算法
目前快速搜索算法主要有1点自适应搜索[7]、3点自适应搜索[8]。1点自适应搜索取曲线两端点进行第1步运算,由于图像边界的影响,易造成误判,影响矢量估算精度。故采用3点自适应搜索改
进后的搜索算法—2点自适应搜索算法,如图3[9]。
如图3,搜索半径r 为5,该搜索算法的原理:1) 平均选取3、6、9点;2) 计算相关值,找到相关值最小的点,这里设第3点;3) 以第3个点为中心,以r /2为半径,找到2、4两点;4) 重复第2
兵工自动化
·90·
个步骤,找到第2点;5) 依次类推,找到1、2、3中相关值最小的点,该点即是要找的匹配点。
图3 2点局域自适应搜索
该搜索算法以曲线的单峰性为基础,在搜索中判断相关值可能减小的方向,在保证搜索精度的同时,可减少搜索的运算量。除第1步搜索需要计算3点的值外,其余各步只需要计算2点的值,搜索半径为2n -1时,全局搜索运算次数为2n +1-1,2点自适应快速搜索算法运算次数为2n +1。
3 实验分析
实验在P Ⅳ2.67GHz ,内存512M 的PC 机上,
操作系统为Windows Xp ,用VC 6.0编程实现。
用手持摄像机拍摄偏转可忽略的抖动图像,从图像序列中取2帧576×768的8位灰度图做静态实验。分别采用块匹配算法(BMA )、传统灰度投影
算法(PA )、2点自适应搜索算法(2PS )、快速灰度投影算法(FPA )、采用2点自适应搜索的快速灰度投影算法(FPA2PS )进行稳像,参考帧图像为图2(a)。矢量估算结果如表1。矢量估算时间如表2。
表1 矢量估算结果(pixel )
BMA PA 2PS FPA FPA2PS n +3帧 (1,-20)(1,-20) (1,-20) (1,-20)(1,-20)n +8帧
(46,-28)(46,-28) (46,-28) (46,-28)(46,-28)
表2 矢量估算时间(ms )
PA 2PS FPA FPA2PS
n +3帧 11.58 10.04 5.26
4.18 n +8
帧
11.44
9.88 5.29 4.22
从实验数据可以看出,改进的各种灰度投影算
法和传统灰度投影算法的矢量估算能力相当,都达到了BMA 的精度;2PS 的矢量估算速度比PA 快1.5ms 左右,效果不明显;FPA 的矢量估算速度约等于PA 的2倍,效果显著;采用2PS 后FPA (FPA2PS )的矢量估算速度更快。
FPA2PS 在动态试验中,估算25帧图像运动的矢量,每帧平均时间为4.207ms 。现取3帧图像如图4,本算法稳像的效果如图5。
(a)
(b) (c)
图4 原始图像序列
(a) (b) (c)
图5 稳像后的图像序列
4 结论
快速灰度投影稳像算法采用等间隔取值和2点自适应快速搜索算法减少了运动矢量检测的计算量。经实验证明,能保持传统灰度投影算法的稳像精度,同时,使运算量减小,稳像速度显著提高。
参考文献:
[1] K. Sauer, B. Schwartz. Efficient block motion estimation using integral projections[J].IEEE Transaction on Circuits
and Systems for Video Technology,1996, 6(5): 513-518. [2] FILIPPO V ALFIO C, MASSIMO M, et al. Digital Image
Stabilization by adaptive block motion vectors filtering[J]. IEEE Trans. Consumer Electronicm 2002, 48(3): 796-801. [3] KENYA U, ATSUSHI M, HIROFUMI I, et al. Automatic
Image Stabilizing System by Full Digital Signal Processing[J]. IEEE Trans. Consumer Electronic, 1990, 36(3): 510-519. (下转第 93 页)
邵杰,等:云重心理论在装甲机械化部队射击指挥能力评估中的应用
·93·
基于云理论的评估方法能有效融合主客观信息,较好地解决了装甲机械化部队射击指挥能力评估中既有定性指标,又有定量指标的综合评价问题。
参考文献:
[1] 李德毅, 孟海军, 史雪梅. 隶属云和隶属云发生器[J].
计算机研究与发展, 1995, 32(6): 16-21.
[2] Li Deyi, Cheung David, Ng V, et al. Uncertainty
Reasoning Based on cloud models in controlles [J]. Computers and Mathematics with Application Elsevier Science, 1998, 35(3): 123.
[3] Li Deyi, Di Caichang, Li Deren, et al. Mining Association
Rules with Linguistic Cloud Models [J]. Journal of Software, 2000, 11(2): 143-158.
**********************************************************************************************************
(上接第 87 页)
(a) 果实的椭圆模型 (b) 填充椭圆用的纹理 (c) 填充后的效果
图8 果实的绘制
3 忠实于真实植物生长特点的处理
为使植物模拟效果逼真,在编程中进行处理:
3.1 随机数的运用
随机数的运用是分形植物模拟中的“灵魂”。如出现侧枝较多的分枝是在左侧或右侧,要随机决定;每分枝的偏转角度要有随机幅度;每层的偏转角也应有所区别等,都需要用随机数处理。另外如各部器官的步长、偏转角、叶长、叶宽、多边形和椭圆型叶子的各个夹角大小等,也都需要应用随机数。
3.2 顶端优势与剪枝操作
“剪枝”是将与植物实际生长不符的枝条剪掉。如图9,水平方向以下方框内的枝条生长方向过于向下,即180>α或0<α,与常见到的树木不符,需要将该枝条剪去。这个操作过程称为“剪枝”。
图9 “剪枝”示意图
考虑植物生长时的“顶端优势”,就是当分枝与最初主干之间的夹角较小时,可在这个分枝上多画一子树,使分枝看起来更伸展更浓密些。在程序中加入判断层数的语句,层数较大时进行顶端优势的
控制,同时各层分枝的长度可以乘一个缩小的比例。
3.3 颜色的分解和色差形成
为增强图像的层次感和立体效果,在控制程序
中,要区别开各部器官的颜色,灵活配置颜色深度,同一器官的颜色也应有一定的渐变幅度。处理方法
主要有2种:一是使用Argb 值,各分量取值可有一定的随机变化幅度,形成颜色落差;二是将绘制不同器官的颜色分解开,方法也是使用随机数。
4 结论
该数学模型能实现植物形态的模拟和交互控制。模拟植物形态时,运用随机函数,为使生成的图像更接近植物,要根据自然植物生长的机理特点,在程序设计中进行剪枝、色差、层次感等处理。
参考文献:
[1] 张树兵, 王建中. 基于L 系统的植物建模方法改进[J].
中国图象图形学报: A 辑, 2002, 7(5): 457-460.
[2] 袁杰, 刘大昕. 基于L 系统的植物图像计算机模拟[J].
应用科技, 2002, 29(11): 44-46.
[3] 李庆忠, 韩金姝. 基于IFS 的树木形态模拟真实感的研
究[J]. 微机发展, 2005, 15(7): 86-88.
[4] Fuchs H, Kedem Z, Naylor B. On Visible Surface
Generation by A Priori Tree Structures [J]. ACM Computer Graphics, 1980, 4(3): 124-133.
[5] Chin N, Feiner S. Near Real-Time Shadow Generation
Using BSP Trees [J]. Computer Graphics, 1989, 23(3): 99-106.
[6] 孙博文. 分形算法与程序设计[M]. 北京: 科学出版社,
2004: 11-60.
************************************************** (上接第 90 页)
[4] KO SJ, LEE S W, JEON S W, et al. Fast digital Image
Stabilizer Based on Gray-Coded Bit-Plane Matching [J]. IEEE Trans. Consumer Electronic, 1999, 45(3): 598-603. [5] JOON K P, YONG C P, DONG W K. An Adaptive Motion
Decision System for Digital Image Stabilizer Based on Edge Pattern matching [J]. IEEE Trans. Consumer Electronic, 1992, 38(3): 607-616.
[6] Censi A, Fusiello A. Image Stabilization by Feature
Tracking[C]. 10th Inter Conf. on Image Analysis and Processing, Venice Italy, 1999, 27(3): 665-667.
[7] 李博, 王孝通, 杨常青, 等. 电子稳像的灰度投影三
点局域自适应搜索算法[J]. 光电工程, 2004, 31(9): 70-72.
[8] 孙辉. 快速灰度投影算法及其在电子稳像中的应用[J].
光学精密工程, 2007, 15(3): 412-416.
[9] 马乔, 郑立评, 于贵波. 某突击炮稳像式火控系统射击
门[J]. 四川兵工学报, 2008(6): 40-42.
几种常见地图投影各自的特点及其分带方法
高斯-克吕格(Gauss-Kruger)投影,是一种“等角横切圆柱投影”。德国数学家、物理学家、天文学家高斯(Carl Friedrich Gauss,1777一 1855)于十九世纪二十年代拟定,后经德国大地测量学家克吕格(Johannes Kruger,1857~1928)于 1912年对投影公式加以补充,故名。设想用一个圆柱横切于球面上投影带的中央经线,按照投影带中央经线投影为直线且长度不变和赤道投影为直线的条件,将中央经线两侧一定经差范围内的球面正形投影于圆柱面。然后将圆柱面沿过南北极的母线剪开展平,即获高斯一克吕格投影平面。 一、只谈比较常用的几种:“墨卡托投影”、“高斯-克吕格投影”、“UTM 投影”、“兰勃特等角投影” 1.墨卡托(Mercator)投影 1.1 墨卡托投影简介 墨卡托(Mercator)投影,是一种" 等角正切圆柱投影”,荷兰地图学家墨卡托(Gerhardus Mercator 1512-1594)在1569年拟定,假设地球被围在一中空的圆柱里,其标准纬线与圆柱相切接触,然后再假想地球中心有一盏灯,把球面上的图形投影到圆柱体上,再把圆柱体展开,这就是一幅选定标准纬线上的“墨卡托投影”绘制出的地图。 墨卡托投影没有角度变形,由每一点向各方向的长度比相等,它的经纬线都是平行直线,且相交成直角,经线间隔相等,纬线间隔从标准纬线向两极逐渐增大。墨卡托投影的地图上长度和面积变形明显,但标准纬线无变形,从标准纬线向两极变形逐渐增大,但因为它具有各个方向均等扩大的特性,保持了方向和相互位置关系的正确。 在地图上保持方向和角度的正确是墨卡托投影的优点,墨卡托投影地图常用作航海图和航空图,如果循着墨卡托投影图上两点间的直线航行,方向不变可以一直到达目的地,因此它对船舰在航行中定位、确定航向都具有有利条件,给航海者带来很大方便。 “海底地形图编绘规范”(GB/T 17834-1999,海军航保部起草)中规定1:25万及更小比例尺的海图采用墨卡托投影,其中基本比例尺海底地形图(1:5万,1:25万,1:100万)采用统一基准纬线30°,非基本比例尺图以制图区域中纬为基准纬线。基准纬线取至整度或整分。 1.2 墨卡托投影坐标系 取零子午线或自定义原点经线(L0)与赤道交点的投影为原点,零子午线或自定义原点经线的投影为纵坐标X轴,赤道的投影为横坐标Y轴,构成墨卡托平面直角坐标系。 2.高斯-克吕格(Gauss-Kruger)投影和UTM(Universal
LK光流算法总结-精选.doc
运动目标检测之Lucas-Kanade 光流算法读书笔记 视觉是人类感知自身周围复杂环境最直接有效的手段之一,而在现实生活中大量有意义的视觉信息都包含在运动中,人眼对运动的物体和目标也更敏感,能够快速的发现运动目标。随着计算机技术、通信技术、图像处理技术的不断发展,计算机视觉己成为目前的热 点研究问题之一。而运动目标检测是计算机视觉研究的核心课题之一,融合了图像处理、模式识别、人工智能、自动控制、计算机等众多领域的先进技术,在军事制导、视觉导航、视频监控、智能交通、医疗诊断、工业产品检测等方面有着重要的实用价值和广阔的发展 前景。 一目标检测 运动目标检测运动目标检测是指从序列图像中将运动的前景目标从背景图像中提取出 来。目前,已有的运动目标检测方法按照算法的基本原理可以分为三类:背景差分法,帧间差 分法和光流法。 1 背景差分法 背景差分法又称背景减除法,背景差分法的原理是将当前帧与背景图像进行差分来得到 运动目标区域,但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高 斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。 缺点:因为要求背景是静止的,所以背景的变化,场景中有很多干扰,比如场景中 有树枝和叶子在风中晃动、水面的波动等等,还有照明的变化和天气的变化等都可能影响检 测的结果 2 帧间差分法 帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的 方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。当监控场景中出现异常 物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,
基于MATLAB的彩色图像灰度化处理
目录 第1章绪论............................................................................................................................ - 1 - 第2章设计原理.................................................................................................................... - 2 - 第3章彩色图像的灰度化处理............................................................................................ - 3 - 3.1加权平均法 .. (3) 3.2平均值法 (3) 3.3最大值法 (4) 3.4举例对比 (5) 3.5结果分析 (6) 第4章结论.......................................................................................................................... - 8 - 参考文献....................................................................................................... 错误!未定义书签。附录............................................................................................................................................ - 9 -
质心算法
3.1 质心检测算法 系统采用质心法进行数据处理能提高测试精度。因为质心法能使CCD 上的图像分辨率达到光敏元尺寸的1/10,那么成像亮线中心在CCD 上所对应的光敏源序号就可以是小数,而非一定是整数,这样通过计算可知,精度提高了0.1个百分点。虽然测量系统的精度有提高,但0.11%的相对误差仍不能令人满意,从误差公式可知,系统误差的改善主要取决于CCD 的像元尺寸。随着CCD 技术的不断发,像元尺寸也会不断改善,系统误差也将会有大幅度减小。 质心法图像预处理算法步骤如下[5]:(1)对图像通过灰度化和反色后阈值选择得到光斑特征区域;(2)模糊去噪(mean blur ),消除热噪声以及像素不均匀产生的噪声;(3)再次进行阈值选择,得到更清晰的光斑区域;(4)形态学处理,选择disk 中和合适的领域模板,对图像进行腐蚀和填充处理,以得到连通域的规则形状图形;(5)边缘检测得到图像边缘,反复实验证明canny 边缘检测算法最好;(6)对边缘再进行形态学strel -imerode -imclose -imfill 相关运算得到更连通的边缘曲线,调用regionprops (L ,properties )函数,根据质心法计算质心。 下面介绍几种常用的质心算法 (1)普通质心算法 (,)ij ij ij c c ij ij x I x y I =∑∑ (3-1) 其中ij I 为二维图像上每个像素点所接收到的光强,该算法适用于没有背景噪 声,背景噪声一致或信噪比较高的情况。 (2)强加权质心算法 0000000000000000,/2,/2 ,/2,/2 ,/2,/2 ,/2,/2y w y x w x i ij j y w y i x w x c y w y x w x ij j y w y i x w x x I w x I w ++=-=-++=-=-=∑∑∑∑
几种常用地图投影
一:等角正切方位投影(球面极地投影) 概念:以极为投影中心,纬线为同心圆,经线为辐射的 直线,纬距由中心向外扩大。 变形:投影中央部分的长度和面积变形小,向外变形逐渐增 大。 用途:主要用于编绘两极地区,国际1∶100万地形图。 二:等距正割圆锥投影 概念:圆锥体面割于球面两条纬线。 变形:纬线呈同心圆弧,经线呈辐射的直线束。 各经线和两标纬无长度变形,即其它纬线均有 长度变形,在两标纬间角度、长度和面积变形 为负,在两标纬外侧变形为正。离开标纬愈远, 变形的绝对值则愈大。 用途:用于编绘东西方向长,南北方向稍宽地区 的地图,如前苏联全图等。 三:等积正割圆锥投影 概念:满足mn=1条件,即在两标纬间经线长度放 大,纬线等倍缩小,两标纬外情况相反。 变形:在标纬上无变形,两标纬间经线长度变形为正, 纬线长度变形为负;在两标纬外侧情况相反。角度 变形在标纬附近很小,离标纬愈远,变形则愈大。 用途:编绘东西南北近乎等大的地区,以及要求面积 正确的各种自然和社会经济地图。
四:等角正割圆锥投影 概念:满足m=n条件,两标纬间经线长度与纬线长度 同程度的缩小,两标纬外同程度的放大。 变形:在标纬上无变形,两标纬间变形为负,标纬外变 形为正,离标纬愈远,变形绝对值则愈大。 用途:用于要求方向正确的自然地图、风向图、洋流图、 航空图,以及要求形状相似的区域地图;并广泛用于制 作各种比例尺的地形图的数学基础。 如我国在1949年前测制的1∶5万地形图,法国、比利 时、西班牙等国家亦曾用它作地形图数学基础,二次大 战后美国用它编制1∶100万航空图。 五:等角正切圆柱投影——墨卡托投影 概念:圆柱体面切于赤道,按等角条件,将经 纬线投影到圆柱体面上,沿某一母线将圆柱体 面剖开,展成平面而形成的投影。是由荷兰制 图学家墨卡托(生于今比利时)于1569年创拟 的,故又称(墨卡托投影)。 变形:经线为等间距的平行直线,纬线为非等 间距垂直于经线的平行直线。离赤道愈远,纬 线的间距愈大。纬度60°以上变形急剧增大, 极点处为无穷大,面积亦随之增大,且与纬线 长度增大倍数的平方成正比,致使原来只有南 美洲面积1/9的位于高纬度的格陵兰岛,在图 上比南美洲大。 用途:等角航线表现为直线,用于编制海图、印度尼西亚和赤道非洲等赤道附近国家和地区的地图、世界时区图和卫星轨迹图等。
精雕JDPaint快捷键大全
北京精雕快捷键表格
选择工具下的快捷键 1、文件 Ctrl+O:打开Ctrl+S:保存Ctrl+N:新建Ctrl+Z:返回2、视图F4:旋转观察F5:窗口观察F6:全部观察F7:选择观察F8:上次观察F12:全屏观察
Ctrl+R:重画 Ctrl+E:自动导行Ctrl+D:正交捕捉3、绘制 Ctrl+Q:直线 Ctrl+P:样条 Ctrl+L:圆 Ctrl+A:圆弧 Ctrl+W:多义线Ctrl+T:矩形 4、编辑 Ctrl+Y:重做 Ctrl+C:复制 Ctrl+X:剪切 Ctrl+V:粘贴 Ctrl+1:区域等距Ctrl+2:区域连接Ctrl+3:区域焊接Ctrl+4:区域求交Ctrl+5:单线等距Ctrl+6:连接 Ctrl+7:修剪 Ctrl+8:剪切 Ctrl+9:延伸 DEL:删除 5、变换 Alt+1:平移 Alt+2:旋转 Alt+3:镜像 Alt+4:缩放 Alt+F2:集合 Alt+F3:取消集合Ctrl+6:并入3D环境 虚拟雕塑工具下的快捷键 1、文件 Ctrl+O:打开Ctrl+S:保存Ctrl+N:新建Ctrl+Z:返回3、视图 F4:旋转观察F5:窗口观察 F6:全部观察 F7:选择观察 F8:上次观察 F12:全屏观察Ctrl+R:重画 Ctrl+E:自动导行
Ctrl+D:正交捕捉4、绘制 Ctrl+Q:直线 Ctrl+P:样条 Ctrl+L:圆 Ctrl+A:圆弧 Ctrl+W:多义线Ctrl+T:矩形 5、编辑 Ctrl+Y:重做 Ctrl+C:复制 Ctrl+X:剪切 Ctrl+V:粘贴 Ctrl+1:区域等距Ctrl+2:区域连接Ctrl+3:区域焊接Ctrl+4:区域求交Ctrl+5:单线等距Ctrl+6:连接 Ctrl+7:修剪 Ctrl+8:剪切 Ctrl+9:延伸DEL:删除 6、变换 Alt+1:平移 Alt+2:旋转 Alt+3:镜像Alt+4:缩放 Alt+F2:集合 Alt+F3:取消集合 Ctrl+6:并入3D环境 7、橡皮 Shift+T:擦除 Shift+G:整体固化 8、几何 Alt+X:扫掠面 Alt+Z:单线浮雕 Alt+Q:延伸面 9、导动 Shift+A:导动堆料 Shift+S:导动去料 Shift+J:导动磨光 Shift+I:消除锯齿 Shift+L:特征磨光 10、颜色 Shift+O:涂抹颜色 Shift+X:种子填色 Shift+V:等高填色 Shift+Z:单线填色 Shift+C:区域填色 Shift+L:颜色区域矢量化11、效果 Shift+E:磨光 12、选项
LK光流算法总结
运动目标检测之Lucas-Kanade光流算法读书笔记 视觉是人类感知自身周围复杂环境最直接有效的手段之一,而在现实生活中大量有意义的视觉信息都包含在运动中,人眼对运动的物体和目标也更敏感,能够快速的发现运动目标。随着计算机技术、通信技术、图像处理技术的不断发展,计算机视觉己成为目前的热点研究问题之一。而运动目标检测是计算机视觉研究的核心课题之一,融合了图像处理、模式识别、人工智能、自动控制、计算机等众多领域的先进技术,在军事制导、视觉导航、视频监控、智能交通、医疗诊断、工业产品检测等方面有着重要的实用价值和广阔的发展前景。 一目标检测 运动目标检测运动目标检测是指从序列图像中将运动的前景目标从背景图像中提取出来。目前,已有的运动目标检测方法按照算法的基本原理可以分为三类:背景差分法,帧间差分法和光流法。 1背景差分法 背景差分法又称背景减除法,背景差分法的原理是将当前帧与背景图像进行差分来得到运动目标区域,但是需要构建一幅背景图像,这幅背景图像必须不含运动目标,并且应该能不断的更新来适应当前背景的变化,构建背景图像的方法有很多,比较常用的有基于单个高斯模型的背景构建,基于混合高斯模型的背景构建,基于中值滤波器的背景构造,基于卡尔曼滤波器的背景构造,基于核函数密度估计的背景模型构造。 缺点:因为要求背景是静止的,所以背景的变化,场景中有很多干扰,比如场景中有树枝和叶子在风中晃动、水面的波动等等,还有照明的变化和天气的变化等都可能影响检测的结果 2帧间差分法 帧间差分法是一种通过对视频图像序列中相邻两帧作差分运算来获得运动目标轮廓的方法,它可以很好地适用于存在多个运动目标和摄像机移动的情况。当监控场景中出现异常物体运动时,帧与帧之间会出现较为明显的差别,两帧相减,得到两帧图像亮度差的绝对值,
地图投影
世界地图常用地图投影知识大全 在不同的场合和用途下使用不同的地图投影,地图投影方法及分类名目众多,象:墨卡托投影,空间斜轴墨卡托投影,桑逊投影,摩尔维特投影,古德投影,等差分纬线多圆锥投影,横轴等积方位投影,横轴等角方位投影,正轴等距方位投影,斜轴等积方位投影,正轴等角圆锥投影,彭纳投影,高斯-克吕格投影,等角圆锥投影等等。 一、世界地图常用投影 1、等差分纬线多圆锥投影(Polyconic Projection With Meridional Interval on Same Parallel Decrease Away From Central Meridian by Equal Difference) 普通多圆锥投影的经纬线网具有很强的球形感,但由于同一纬线上的经线间隔相等,在编制世界地图时,会导致图形边缘具有较大面积变形。1963年中国地图出版社在普通多圆锥投影的基础上,设计出了等差分纬线多圆锥投影。 等差分纬线多圆锥投影的赤道和中央经线是相互垂直的直线,中央经线长度比等于1;其它纬线为凸向对称于赤道的同轴圆弧,其圆心位于中央经线的延长线上,中央经线上的纬线间隔从赤道向高纬略有放大;其它经线为凹向对称于中央经线的曲线,其经线间隔随离中央经线距离的增加而按等差级数递减;极点投影成圆弧(一般被图廓截掉),其长度等于赤道的一半(图2-30)。 通过对大陆的合理配置,该投影能完整地表现太平洋及其沿岸国家,突出显示我国与邻近国家的水陆关系。从变形性质上看,等差分纬线多圆锥投影属于面积变形不大的任意投影。我国绝大部分地区的面积变形在10%以内。中央经线和±44o纬线的交点处没有角度变形,随远离该点变形愈大。全国大部分地区的最大角度变形在10o以内。等差分纬线多圆锥投影是我国编制各种世界政区图和其它类型世界地图的最主要的投影之一。
一种视频微表情检测的改进光流算法
2018年6月图 学 学 报 June2018第39卷第3期JOURNAL OF GRAPHICS V ol.39No.3一种视频微表情检测的改进光流算法 李秋宇1,张玉明2,杨福猛3,詹曙1 (1. 合肥工业大学计算机与信息学院,安徽合肥 230009; 2. 芜湖职业技术学院电气工程学院,安徽芜湖 241000; 3. 安徽信息工程学院,安徽芜湖 241000) 摘要:微表情是人们在试图隐藏自己真实情感时表现出的不受自主神经控制、持续时间短暂,强度十分微弱的面部表情。由于微表情与谎言识别有着密切的联系,其公共安全、侦查讯问、临床医学等领域有很大的应用前景。针对人为识别微表情十分困难的问题,提出一种基于Horn-Schunck (HS)光流法改进并应用于微表情自动检测的方法。使用预条件Gauss-Seidel迭代方法改进了HS光流法,加快了收敛速度。通过在自发微表情数据库CASME中进行实验,该验证方法在微表情检测中有很好的效果。 关键词:微表情检测;光流法;预条件迭代 中图分类号:TP 391 DOI:10.11996/JG.j.2095-302X.2018030448 文献标识码:A 文章编号:2095-302X(2018)03-0448-05 An Improved Optical Flow Algorithm for Micro Expression Detection in the Video Sequence LI Qiuyu1, ZHANG Yuming2, YANG Fumeng3, ZHAN Shu1 (1. School of Computer and Information, Hefei University of Technology, Hefei Anhui 230009, China; 2. School of Electrical Engineering, Wuhu Institute of Technology, Wuhu Anhui 241000, China; 3. Anhui Institute of Information Technology, Wuhu Anhui 241000, China) Abstract: Micro-expression is a kind of short-duration subtle expression which is not controlled by the autonomic nervous system. Micro-expression appears when a person is attempting to conceal his true emotion. Micro-expression detection boasts great application prospects in many fields, such as public security, investigation and interrogation as well as clinical medicine due to its close relationship with lie detection. Automatic detection of micro-expressions has come to the fore in research, because it is of great difficulty to artificially identify micro-expression . This paper proposes an improved algorithm based on the Horn-Schunck (HS) optical flow for automatic micro-expression detection. In this study, the pre-conditioned Gauss-Seidel iterative method is employed to improve the HS optical flow method, which accelerates the convergence rate. Experiments in the spontaneous micro-expression database CASME show that the propounded method exerts an excellent effect on the detection of micro-expression. Keywords: micro-expression detection; optical flow; preconditioned iteration 第一作者:李秋宇(1993-),男,安徽霍邱人,硕士研究生。主要研究方向为计算机视觉、深度学习。E-mail:lqy@https://www.360docs.net/doc/e04095224.html, 通信作者:詹曙(1968-),男,安徽合肥人,教授,博士。主要研究方向为三维人脸图像分析和识别、医学影像分析和医学成像系统。 E-mail:shu_zhan@https://www.360docs.net/doc/e04095224.html, 万方数据
图像处理灰度变换实验
一. 实验名称:空间图像增强(一) 一.实验目的 1.熟悉和掌握利用matlab工具进行数字图像的读、写、显示、像素处理等数字图像处理的基本步骤和流程。 2.熟练掌握各种空间域图像增强的基本原理及方法。 3.熟悉通过灰度变换方式进行图像增强的基本原理、方法和实现。 4.熟悉直方图均衡化的基本原理、方法和实现。 二.实验原理 (一)数字图像的灰度变换 灰度变换是图像增强的一种经典而有效的方法。灰度变换的原理是将图像的每一个像素的灰度值通过一个函数,对应到另一个灰度值上去从而实现灰度的变换。常见的灰度变换有线性灰度变换和非线性灰度变换,其中非线性灰度变换包括对数变换和幂律(伽马)变换等。 1、线性灰度变换 1)当图像成像过程曝光不足或过度,或由于成像设备的非线性和图像记录设备动态范围太窄等因素,都会产生对比度不足的弊病,使图像中的细节分辨不清,图像缺少层次。这时,可将灰度范围进行线性的扩展或压缩,这种处理过程被称为图像的线性灰度变换。对灰度图像进行线性灰度变换能将输入图像的灰度值的动态范围按线性关系公式拉伸扩展至指定范围或整个动态范围。 2)令原图像f(x,y)的灰度范围为[a,b],线性变换后得到图像g(x,y),其灰度范围为[c,d],则线性灰度变换公式可表示为
a y x f b y x f a b y x f c c a y x f a b c d d y x g <≤≤>?????+---=),(),(),(, ,]),([,),( (1) 由(1)式可知,对于介于原图像f (x,y )的最大和最小灰度值之间的灰度值,可通过线性变换公式,一一对应到灰度范围[c,d]之间,其斜率为(d-c)/(b-a);对于小于原图像的最小灰度值或大于原图像的最大灰度值的灰度值,令其分别恒等于变换后的最小和最大灰度值。变换示意图如图1所示。 图1 线性灰度变换示意图 当斜率大于一时,变换后的灰度值范围得到拉伸,图像对比度得到提高;当斜率小于一时,变换后的灰度值范围被压缩,最小与最大灰度值的差变小,图像对比度降低;当斜率等于一时,相当于对图像不做变换。 3)由上述性质可知,线性灰度变换能选择性地加强或降低特定灰度值范围内的对比度,故线性灰度变换同样也可做分段处理:对于有价值的灰度范围,将斜率调整为大于一,用于图像细节;对于不重要的灰度范围,将图像压缩,降低对比度,减轻无用信息的干扰。最常用的分段线性变换的方法是分三段进行线性变换。 在原图像灰度值的最大值和最小值之间设置两个拐点,在拐点处,原图像的灰度值分别为r 1,r 2,该拐点对应的变换后的图像的灰度值分别为s 1,s 2,另外,取原图像灰度的最小值为r 0,最大值为r m ,对应的变换后的灰度值分别为s 0,s m 。
三种不同灰度图像增强算法对比
三种不同灰度图像增强算法对比 一、摘要 本文主要是运用直方图均衡化、平滑、锐化三种常见的图像增强算法对图像进行处理,并在此基础上分别用这 3 种算法处理的灰度图像进行比较,比对它们对图像的处理效果, 分析3 种方法在图像增强处理能力的优劣之处。 结果发现,直方图均衡化可以均衡图像的灰度等级, 经过直方图的均衡化,图像的细节更加清楚了,但是由于直方图均衡化没有考虑图像的内容,只是简单的将图像进行直方图均衡,提高图像的对比度,使图像看起来亮度过高,使图像细节受到损失; 图像平滑的目的是减少或消除图像的噪声, 图像平滑可以使图像突兀的地方变得不明显, 但是会使图像模糊,这也是图像平滑后不可避免的后果,只能尽量减轻,尽量的平滑掉图像的噪声又尽量保持图像细节,这也是图像平滑研究的主要问题; 图像锐化使图像的边缘、轮廓变得清晰,并使其细节清晰,常对图像进行微分处理,但是图像的信噪比有所下降。 关键词: 图像增强灰度图直方图平滑锐化 二、三种图像增强算法 图像预处理是相对图像识别、图像理解而言的一种前期处理,主要是指按需要进行适当的变换突出某些有用的信息,去除或削弱无用的信息,在对图像进行分析之前, 通常要对图像质量进行改善,改善的目的就是要使处理后的图像比原始图像更适合特定的应用。影响图像清晰度的因素很多,主要有光照不足、线路传输收到干扰等。 现存的图像增强技术主要分为空间域法和频率域法两类,其中的增强方法主要有直方图的修正、灰度变换、图像平滑、图像锐化、伪彩色和假彩色处理等。下面主要采用直方图均衡化、图像平滑、图像线性锐化对图像进行增强处理, 对比他们的处理效果,分析 3 种方法的在图像增强处理方面的优劣。 1、直方图均衡化 直方图均衡化也称为直方图均匀化,是一种常见的灰度增强算法,是将原图像的直方图经过变换函数修整为均匀直方图,然后按均衡后的直方图修整原图像。 为方便研究,先将直方图归一化,然后图像增强变换函数需要满足2个条件。 假设灰度级为归一化至范围[0,1]内的连续量,设其中任一灰度级别Z归一化为r,变换后图像的任一灰度级Z'归一化为s,显然r,s应当满足:0<=r<=1,0<=s<=1 因此直方图修正就是对下列公式的计算过程:s=T(r)或r=T'(s) 式中T(r)为变换函数,它必须满足下列条件: a在0<=r<=1区间内是单值单调增加函数; b对于0<=r<=1,有T(r)在[0,1]内。 条件a 保证灰度级从黑到白的次序,而条件b确保映射后的像素灰度在允许的范围内,避免整个图像明显变亮或者变暗。 从S 到r的反变换关系为r=T'(s) ;T'(s)对r同样满足上述条件。 灰度变换是对图像上各个像素点的灰度值x 按某个函数T 变换到y ,将图像的灰度级整个范围或其中某一段( A, B)扩展或压缩到( A, B)。直方图均衡化是灰度变换的一个重要应用,是以累计分布函数变换为基础的直方图修正法, 可以产生一幅灰度级分布具有均匀概率密度的图像。一幅图像灰度级r k 出现的概率近似为 其中n 是图像中像素的总和, nk 是灰度级为r k 的像素个数, L 为图像中灰度级总数。若
精雕软件简单教程
精雕软件简单教程 发布:2014-05-22 ?阅读:459 您的雕刻机软件会操作了吗,慢慢学习吧,泽凯数控设备有限公司帮助您 在数控雕刻机使用过程中,精雕、文泰、type3、ug等软件是客户必须用的,只不过客户根据自己的习惯会选用不同的设计软件。其中精雕是目前使用率比较广泛的设计软件之一,它能很轻松的完成各种浮雕的雕刻路径设置。但对于很多初学者,精雕还是比较难的,因为更多人不知道如何入门。我们简单介绍一下精雕的如何教程。 解压后无需安装,将JDPait和NCservert创建快捷方式托至桌面 1. 运行雕刻机精雕软件(JDPaint)之前先运行NC路径转换器(NCserver) 2.打开精雕软件 3. 输入图片 点击【文件】——【输入】——【点阵图像】——找到要刻的灰度图(一般为bmp格式)——打开 4.调整图片大小 选中图片——点击【变换】——【放缩】——设置合适的尺寸——确定 ? 5.生成浮雕曲面 点击【艺术曲面】——【图像纹理】——【位图转成网格】——点击图片——设置合适的曲面高度 向变换 将图片拖至其他位置与网格分离——选中网格——点击【虚拟雕塑工具】——点击【模型】——Z向变换——点击将高点移至XOY平面
7.做路径 点击【选择工具】——选中网格——点击【刀具路径】——【路径向导】——选择曲面精雕刻——下一步——选择合适的刀具(刀具库中没有的刀具可以双击其中一把刀具将其参数修改后确定)——下一步(使用维宏控制系统的无需选材料)——将雕刻机雕刻路径参数中的路径间距重新设置(一般将重叠率调至20%-35%)——完成 8.输出路径 拉框选中已经做好的路径——点击【刀具路径】——输出刀具路径——找到要保存的位置并命名后点击保存———ENG文件格式选择,输出原点处点击【特征点】选择路径左下角——确定——将NC路径转换器的文件头尾设置全部清空——点击【生成】 ? 9.将做好的NC文件导入雕刻机控制系统(维宏控制)按照维宏控制操作说明进行操作即可完成雕刻。
地图投影的基本问题
3.地图投影的基本问题 3.1地图投影的概念 在数学中,投影(Project)的含义是指建立两个点集间一一对应的映射关系。同样,在地图学中,地图投影就是指建立地球表面上的点与投影平面上点之间的一一对应关系。地图投影的基本问题就是利用一定的数学法则把地球表面上的经纬线网表示到平面上。凡是地理信息系统就必然要考虑到地图投影,地图投影的使用保证了空间信息在地域上的联系和完整性,在各类地理信息系统的建立过程中,选择适当的地图投影系统是首先要考虑的问题。由于地球椭球体表面是曲面,而地图通常是要绘制在平面图纸上,因此制图时首先要把曲面展为平面,然而球面是个不可展的曲面,即把它直接展为平面时,不可能不发生破裂或褶皱。若用这种具有破裂或褶皱的平面绘制地图,显然是不实际的,所以必须采用特殊的方法将曲面展开,使其成为没有破裂或褶皱的平面。 3.2地图投影的变形 3.2.1变形的种类 地图投影的方法很多,用不同的投影方法得到的经纬线网形式不同。用地图投影的方法将球面展为平面,虽然可以保持图形的完整和连续,但它们与球面上的经纬线网形状并不完全相似。这表明投影之后,地图上的经纬线网发生了变形,因而根据地理坐标展绘在地图上的各种地面事物,也必然随之发生变形。这种变形使地面事物的几何特性(长度、方向、面积)受到破坏。把地图上的经纬线网与地球仪上的经纬线网进行比较,可以发现变形表现在长度、面积和角度三个方面,分别用长度比、面积比的变化显示投影中长度变形和面积变形。如果长度变形或面积变形为零,则没有长度变形或没有面积变形。角度变形即某一角度投影后角值与它在地球表面上固有角值之差。 1)长度变形 即地图上的经纬线长度与地球仪上的经纬线长度特点并不完全相同,地图上的经纬线长度并非都是按照同一比例缩小的,这表明地图上具有长度变形。 在地球仪上经纬线的长度具有下列特点:第一,纬线长度不等,其中赤道最长,纬度越高,纬线越短,极地的纬线长度为零;第二,在同一条纬线上,经差相同的纬线弧长相等;第三,所有的经线长度都相等。长度变形的情况因投影而异。在同一投影上,长度变形不仅随地点而改变,在同一点上还因方向不同而不同。 2)面积变形 即由于地图上经纬线网格面积与地球仪经纬线网格面积的特点不同,在地图上经纬线网格面积不是按照同一比例缩小的,这表明地图上具有面积变形。 在地球仪上经纬线网格的面积具有下列特点:第一,在同一纬度带内,经差相同的网络面积相等。第二,在同一经度带内,纬线越高,网络面积越小。然而地图上却并非完全如此。如在图4-9-a上,同一纬度带内,纬差相等的网格面积相等,这些面积不是按照同一比例缩
图像灰度化
图像灰度化 颜色可分为黑白色和彩色。黑白色指颜色中不包含任何的色彩成分,仅由黑色和白色组成。在RGB颜色模型中,如果R=G=B,则颜色(R, G, B)表示一种黑白颜色;其中R=G=B的值叫做灰度值,所以黑白色又叫做灰度颜色。彩色和灰度之间可以互相转化,由彩色转化为灰度的过程叫做灰度化处理;由灰度化转为彩色的过程称为伪彩色处理。 相应地,数字图像可分为灰度图像和彩色图像。通过灰度化处理和伪彩色处理,可以使伪彩色图像与灰度图像相互转化。 灰度化就是使彩色的R,G,B分量值相等的过程。由于R,G,B的取值范围是0 ~ 255,所以灰度的级别只有256级,即灰度图像仅能表现256种颜色(灰度)。 灰度化的处理方法主要有如下3种[6]: (1)最大值法:使R,G,B的值等于3值中最大的一个,即 R=G=B=max(R,G,,B) (2-3 ) 最大值法会形成亮度很高的灰度图像。 (2)平均值法:使R,G,B的值求出平均值,即 R=G=B=(R+G+B)/3 (2-4 )平均值法会形成比较柔和的灰度图像。 (3)加权平均值法:根据重要性或其他指标给R,G,B赋予不同的权值,并使R,G,B的值加权平均,即 R=G=B=(W r R + W g G + W b B)/3 (2-5 )其中W r,W g,W b分别为R,G,B的权值。W r,W g,W b取不同的值,加权平均值法就形成不同的灰度图像。由于人眼对绿色的敏感度最高,红色次之,对蓝色最低,因此使W g>W r>W b将得到比较合理的灰度图像。实验和理论推导证明,但W r= 0.30,W g =0.59,W b=0.11时,即当 V gray=0.30R + 0.59G + 0.11B R=G=B= V gray(2-6 )时,能得到最合理的灰度图像。 本文采用方法(3)实现灰度转化,有比较好的效果,结果如图所示。
几种地图投影的特点及分带方法
一、只谈比较常用的几种:“墨卡托投影”、“高斯-克吕格投影”、“UTM投影”、“兰勃特等角投影。 1.墨卡托(Mercator)投影 1.1 墨卡托投影简介 墨卡托(Mercator)投影,是一种"等角正切圆柱投影”,荷兰地图学家墨卡托(GerhardusMercator1512-1594)在1569年拟定,假设地球被围在一中空的圆柱里,其标准纬线与圆柱相切接触,然后再假想地球中心有一盏灯,把球面上的图形投影到圆柱体上,再把圆柱体展开,这就是一幅选定标准纬线上的“墨卡托投影”绘制出的地图。 墨卡托投影没有角度变形,由每一点向各方向的长度比相等,它的经纬线都是平行直线,且相交成直角,经线间隔相等,纬线间隔从标准纬线向两极逐渐增大。墨卡托投影的地图上长度和面积变形明显,但标准纬线无变形,从标准纬线向两极变形逐渐增大,但因为它具有各个方向均等扩大的特性,保持了方向和相互位置关系的正确。 在地图上保持方向和角度的正确是墨卡托投影的优点,墨卡托投影地图常用作航海图和航空图,如果循着墨卡托投影图上两点间的直线航行,方向不变可以一直到达目的地,因此它对船舰在航行中定位、确定航向都具有有利条件,给航海者带来很大方便。 “海底地形图编绘规范”(GB/T17834-1999,海军航保部起草)中规定1:25万及更小比例尺的海图采用墨卡托投影,其中基本比例尺海底地形图(1:5万,1:25万,1:100万)采用统一基准纬线30°,非基本比例尺图以制图区域中纬为基准纬线。基准纬线取至整度或整分。 1.2 墨卡托投影坐标系 取零子午线或自定义原点经线(L0)与赤道交点的投影为原点,零子午线或自定义原点经线的投影为纵坐标X轴,赤道的投影为横坐标Y轴,构成墨卡托平面直角坐标系。 2.高斯-克吕格(Gauss-Kruger)投影和UTM(UniversalTransverseMercator)投影 2.1 高斯-克吕格投影简介 高斯-克吕格(Gauss-Kruger)投影,是一种“等角横切圆柱投影”。德国数学家、物理学家、天文学家高斯(CarlFriedrichGauss,1777一1855)于十九世纪二十年代拟定,后经德国大地测量学家克吕格(JohannesKruger,1857~1928)于1912年对投影公式加以补充,故名。设想用一个圆柱横切于球面上投影带的中央经线,按照投影带中央经线投影为直线且长度不变和赤道投影为直线的条件,将中央经线两侧一定经差范围内的球面正形投影于圆柱面。然后将圆柱面沿过南北极的母线剪开展平,即获高斯一克吕格投影平面。 高斯一克吕格投影后,除中央经线和赤道为直线外,其他经线均为对称于中央经线的曲线。高斯-克吕格投影没有角度变形,在长度和面积上变形也很小,中央经线无变形,自中央经线向投影带边缘,变形逐渐增加,变形最大处在投影带内赤道的两端。由于其投影精度高,变形小,而且计算简便(各投影带坐标一致,只要算出一个带的数据,其他各带都能应用),因此在大比例尺地形图中应用,可以满足军事上各种需要,并能在图上进行精确的量测计算。 按一定经差将地球椭球面划分成若干投影带,这是高斯投影中限制长度变形的最有效方法。分带时既要控制长度变形使其不大于测图误差,又要使带数不致过多以减少换带计算工作,据此原则将地球椭球面沿子午线划分成经差相等的瓜瓣形地带,以便分带投影。通常按经差6度或3度分为六度带或三度带。六度带自0度子午线起每隔经差6度自西向东分带,带号依次编为第1、2…60带。三度带是在六度带的基础上分成的,它的中央子午线与六度带的中央子午线和分带子午线重合,即自1.5度子午线起每隔经差3度自西向东分带,带号
(完整word版)图像灰度化
图像灰度化处理 彩色图像是由三个不同的分量组成,我们称之为三通道图像。对彩色图像进行处理时,我们往往需要对三个通道依次进行处理,时间开销将会很大。因此,为了达到提高整个应用系统的处理速度的目的,需要减少所需处理的数据量。在图像处理中,图像的灰度化的就是把由RGB 三通道的数据的彩色图像变为单通道的数据的灰度图像。在上述的RGB 模型中,如果R, G, B 他们的值相等,即使是三通道数据,也是表现中一种灰度颜色,灰度值就是R, G, B 的值。灰度图像中各个像素位置的灰度范围为0-255。可以发现,当R,G 和B 他们三者相等时,我们只需一个字节存放该灰度值即可,对于R, G, B 不同的三通道图像,也可以进行灰度化。 目前,最常用的是以下四种彩色图像灰度化方法: 1. 单分量法 三通道图像中R, G, B 三个分量的值可以分别作为灰度图像的灰度值。我们可 以根据实际应用的需要选择其中一个作为灰度图像即可。此时,灰度化公式如下: f ( x, y ) = R( x, y) f ( x, y ) =G ( x, y) f ( x, y )= B( x, y) 其中f ( x, y) 为灰度化后的灰度图像在位置(x, y)的像素值, R(x, y), G(x, y), B(x,y)分别表示三个分量的值。 2.最大值法:该方法首先计算各个像素位置的三个分量的最大值,然后将最大 者作为灰度化后的结果,即: f (x, y)= max ((R ( x, y ) , G ( x, y ) , B ( x, y )) 3.平均值法:对于彩色图像,该方法首先计算三个通道分量的平均值,然后将 该平均值作为图像的灰度值,即: f ( x, y ) = ( R( x, y ) +G ( x, y ) + B( x, y)) / 3 4.加权平均法 上述三种方法实现简单,都是对三个分量做同等处理,然而并没有考虑不同分 量的重要性。根据三个分量的各自的重要性或者其他需要,可以对三个分量分配 不同的权值,然后计算加权结果,并将加权后的均值作灰度化的结果。即可以按 下式对输入的图像信号进行灰度化: f (x, y)= 0.30 R ( x, y )+ 0.59G ( x, y)+ 0.11B ( x, y ) 在图像灰度化时,加权平均法是目前最常用的方法。因为其灰度化结果更为 合理,更符合实际应用的需要。图 2.1.b 为对图 2.1.a 中的彩色图像,采用上述的 加权平均法进行灰度化后的结果。 function I = rgb2gray(varargin) threeD = (ndims(X)==3); T = inv([1.0 0.956 0.621; 1.0 -0.272 -0.647; 1.0 -1.106 1.703]); coef = T(1,:); if threeD if isa(X, 'double') || isa(X, 'single') X = reshape(X(:),origSize(1)*origSize(2),3); sizeOutput = [origSize(1), origSize(2)];
快速灰度投影稳像算法研究
第28卷第8期 兵工自动化 Vol. 28, No. 8 2009年8月 Ordnance Industry Automation Aug. 2009 ·88· doi: 10.3969/j.issn.1006-1576.2009.08.031 快速灰度投影稳像算法研究 周亚军,王翔,苏享,姚志龙,姚春柱 (解放军炮兵学院 信息化弹药研发中心,安徽 合肥 230031) 摘要:为提高灰度投影稳像算法的速度,提出一种等间隔快速投影算法:参考帧图像每行(列)进行投影,待稳定帧图像的投影区域进行等间隔行(列)投影,所有的投影行(列)内等间隔取像素值,将2帧图像的投影曲线进行遍历相关运算,得出图像的运动矢量。通过分析相关曲线,得出其单峰性的特点。实验结果表明,该算法可保持传统灰度投影算法的稳像精度,运算量显著减小,计算速度大大提高。 关键词:电子稳像;灰度投影;快速投影;快速搜索 中图分类号:TP301.1; TP391.9 文献标识码:A Research on Fast Gray Projection Algorithm for Image Stabilization ZHOU Ya-jun, WANG Xiang, SU Xiang, YAO Zhi-long, YAO Chun-zhu (Informational Ammunition Research & Developing Center, Artillery Academy of PLA, Hefei 230031, China) Abstract: In order to accelerate gray projection and image stabilization algorithm, put forward a uniformly-spaced allegro algorithm: project each column (row) of the reference frame image, and process uniformly-spaced column (row) projections among the proposed stable frames’ projection area. Fetch pixel value among equal intervals of all projection columns (rows). Put up ergodic operations of the two frame images’ projection curve, thus obtain moving vectors of the image. Then through analyzing relation curve, find its features of unimodality. Experiment result shows the algorithm can keep precision of traditional algorithm, while can simplify and accelerate the calculation. Keywords: Electronic image stabilization; Gray projection; Fast projection; Fast search 0 引言 电子稳像(Electronic image stabilization -EIS )通过检测并补偿图像帧间运动矢量,来减缓甚至消除图像序列的抖动。运动矢量的检测是电子稳像的关键环节,目前的主要算法有:灰度投影法[1]、块 匹配算法[2-3]、位平面匹配法[4]、特征跟踪法[5-6]等。快速搜索算法只用在矢量检测相关运算中,全局搜索的运算量不大,快速搜索算法对提高估算速度不明显。故提出等间隔快速投影算法,在保持传统灰度投影算法的稳像精度的基础上,使计算速度提高。 1 快速灰度投影 1.1 传统灰度投影 灰度投影就是将经过滤波预处理后的每一帧M ×N 图像的二维灰度信息映射成2个独立的一维投影序列。计算公式如下: 1()(,)n k k y G x G x y ==∑ (1) ∑==m x k k y x G y G 1 ),()( (2) 其中:m 、n 分别是图像投影区域的宽度、高度;G k (x ,y )为第k 帧图像(x ,y )上位置处的像素灰度值; G k (x )为该图像第x 列的灰度投影值;G k (y )为该图像 第y 行的灰度投影值。 传统灰度投影中参考帧和待稳定图像的投影区域相同,且通常采用全投影,即将投影区域每行(列)进行映射,行(列)内的每个像素都参与投影。 1.2 快速灰度投影算法 相邻像素具有灰度相似性,在灰度投影计算时,取小区域内一个像素值,可代表这块小区域的灰度特征。就可减小运算量,加快灰度投影的速度,而不影响稳像精度。等间隔投影就是简单有效的方法。由于行、列的投影相关计算类似,现以列投影为例来说明图像快速灰度投影及其计算的过程。 等间隔投影算法要求采用遍历运算才可得到准确的运动矢量,否则会影响矢量的估算精度。参考帧图像所有列投影,每列内等间隔取像素值。间隔不宜过大,以免图像信息损失过多,取3~5个像素。 待稳定帧图像的投影如图1,图像的投影区域为灰色区域abcd ,列与列之间的间隔为dx ,列中像素与像素间隔dy (为计算方便,取的间隔值相同),0x r 、0y r 分别为水平、垂直方向的最大稳像范围。假设投影区域宽度、高度为m 、n ,取dx =3,dy =3, 收稿日期:2009-02-14;修回日期:2009-04-10 作者简介:周亚军(1983-),男,江西人,炮兵学院在读研究生,从事数字图像处理研究。