CNC控制板V44使用说明
Q :
70
27
35
51
CNC 控制板V44简单使用说明
注:在V43控制板的基础上,完成了V44的改进和完善。 注:
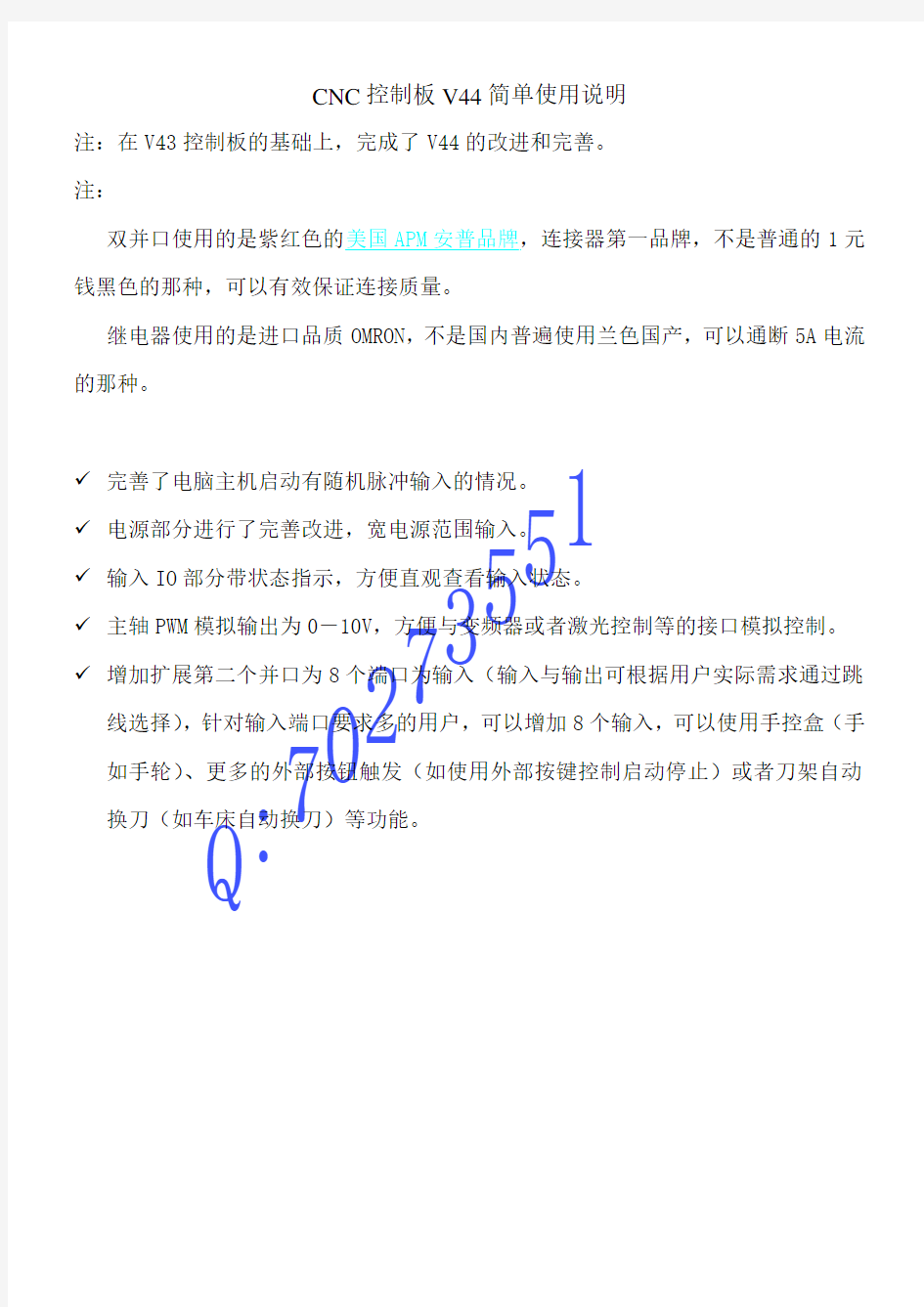
双并口使用的是紫红色的美国APM 安普品牌,连接器第一品牌,不是普通的1元钱黑色的那种,可以有效保证连接质量。
继电器使用的是进口品质OMRON,不是国内普遍使用兰色国产,可以通断5A 电流的那种。
9 完善了电脑主机启动有随机脉冲输入的情况。
9 电源部分进行了完善改进,宽电源范围输入。
9 输入IO 部分带状态指示,方便直观查看输入状态。
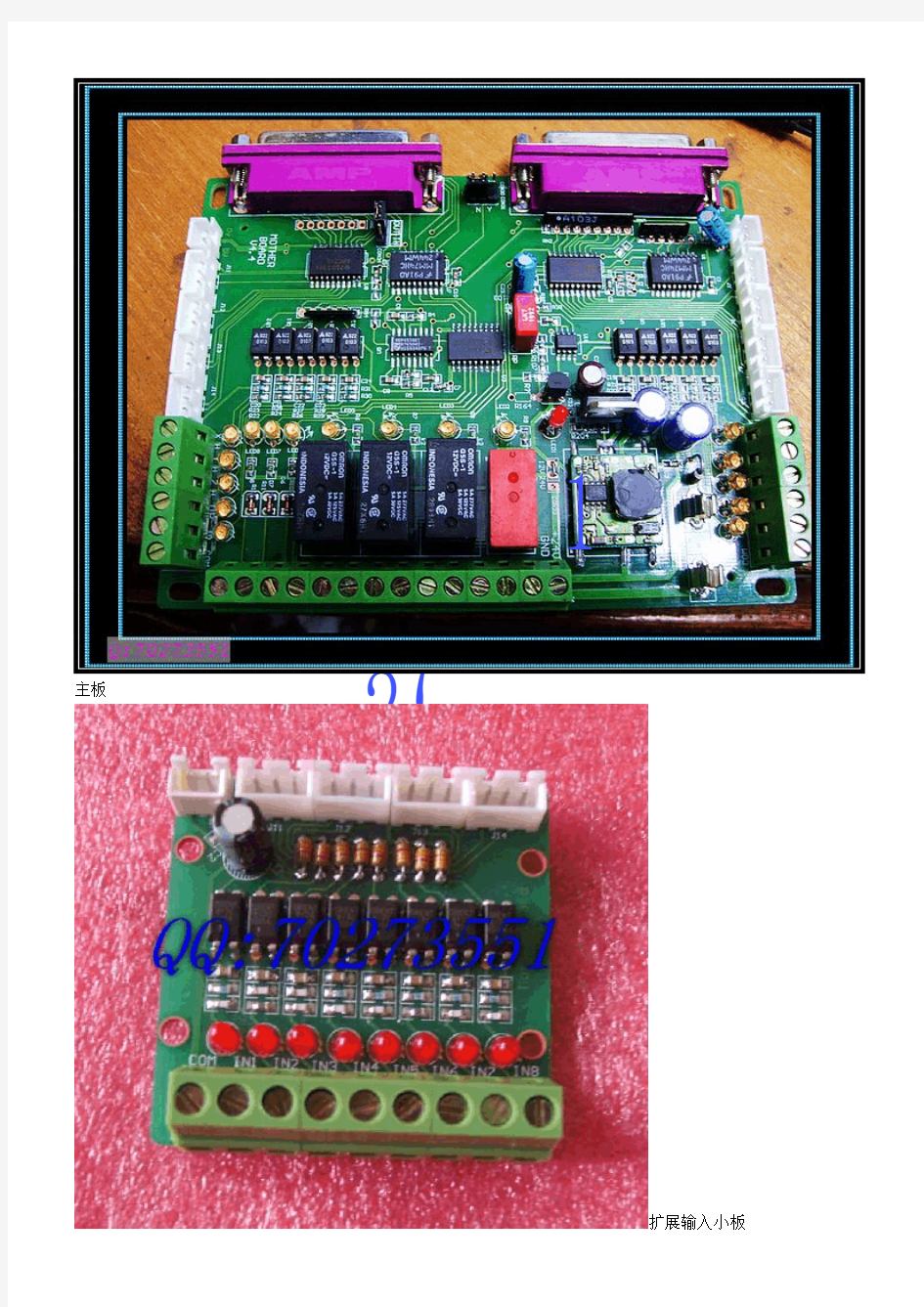
9 主轴PWM 模拟输出为0-10V,方便与变频器或者激光控制等的接口模拟控制。 9 增加扩展第二个并口为8个端口为输入(输入与输出可根据用户实际需求通过跳
线选择),针对输入端口要求多的用户,可以增加8个输入,可以使用手控盒(手
如手轮)、更多的外部按钮触发(如使用外部按键控制启动停止)或者刀架自动换刀(如车床自动换刀)等功能。
Q :
70
27
3551
主板
Q :
70
27
3551
功能简介
1、
功能强大,同时使用两个接口,把所有的功能都扩展出来,也可只使用一个
并口,但功能有限。 2、
所有的输入信号都经过光电隔离,不用担心强电信号和干扰信号进入电脑板
卡上,安全保证。 3、
芯片和大部分元件使用SMD 贴片元件,提升可靠性。所有的输入信号都经过
处理后才进入电脑,不怕干扰和误动作。 4、 输入信号及电源使用规范的工业24V 电源,或者使用18-24V 宽电源均可。 5、
输出控制使用工业PLC 内使用的进口品质12V 或者24V 继电器,有效保证工
作正常。
6、 轴控制信号可以连接步进驱动或者伺服驱动,方便不同用户的实际需求。
7、
最多可以控制7轴:
3个方向轴
3个附加扩展轴,
1个主轴 可以通过手动控制主轴:
用继电器或电流接触器控制电机的启动(顺时针或逆时针)和停止。 通过分步或直接脉冲控制电机(电机为伺服电机)。
通过脉冲宽度调制信号控制电机(如PWM输入控制的变频器)。 D.可以输出模拟电压0-10V,可以通过S命令直接控制变频器。
10、 常用10个输入信号,可扩展到18个输入接口:
3个轴的极限限位,
Q :
70
27
3551
3个轴的原点开关、 1个紧急停止开关、 1个启动开关、 1个极限解除开关 1个主轴速度检测输入
另可扩展小板再增加8个输入口,可以自定义OEM 触发或者连接自动刀架。
11、 输出信号:
6个轴的信号、X 轴、Y 轴、Z 轴、A、B、C 扩展轴
1个主轴的控制信号(可直接连接伺服和变频),
2个主轴的正反转继电器(使用M3和M4代码编程控制), 2个冷却控制(M7、M8编程代码分别控制水冷和气冷)
2路看门狗保护信号输出:如果Mach3没有正常安装或者处于紧急停止状态
或脉冲群的产生失败接口上将没有信号,可以有效的进行保护。
3路备用控制信号,可以随意进行扩展。
2路备用输入及2路备用输出信号,可随意扩展
12、 电源
工业用16-24V 直流宽范围电源输入 。 13、 指示:
1个电源指示,接电源正常后指示灯亮 1路看门名狗保护输出指示 6路辅助功能控制输出指示 18路输入状态指示
1
5
5
3
7
2
7
:
Q
使用简介
1、整体框架接口图
1
5
5
3
7
2
7
:
Q
扩展输入小板框架图示
Q :
70
27
3551
2、各个接口详细说明
2-1 连接电脑的通讯接口 LPT1
连接到电脑并口LPT1
LPT2
连接到电脑并口LPT2,一般电脑都只有一个并口,需要增加并口扩展成两并口,增
Q :
70
27
35
51
2-1:输出各轴信号
XYZ 三轴及主轴控制信号输出
对应针脚信号说明: VCC :+5V (power)
Singal of three pin describe CLK : 脉冲信号pulse signal (output)
ABC三轴及两路备用信号输出
A\B\C three axis and two backup output signals
1
5
5
3
7
2
7
:
Q
Q :
70
27
3551
PWM
输出使用说明
PWM 模拟电压0-10V 输出,见控制板接口J15,请注意极性(如上图示)
如果输出最大值不及10V ,请尝试调整此电位器。
PWM 输出设置:按如下图设置
Q :
70
27
3551
PWM 输出0-10V 对应数据
(使用美国FLUKE 92B )示波表测试,见下图,最低0转,最高8000转)
1)转速为0时的PWM 输出
2)转速为100的PWM 输出
3)转速为1000转的PWM 输出
4)转速为3000转的PWM 输出
5)转速为8000转的PWM 输出
Q :
70
27
3551
电源输入及辅助控制信号
Input power and peripheral control signal
,电源接口,上面为24V ,下面为地,请配备直流24V 电源,范围为
16-24V ,最大值为24V ,超过电压值会损坏控制板,请注意。
Q :
70
27
3551
1、2是电源接口,接24V 直流电源
K1是保护继电器,当软件工作正常,按复位按钮后,K1工作,对应的指示灯LED2亮,用K1控制三个轴驱动器和主轴,当出现故障时,按紧停开关后,K1会出保护,切断电源,从而达到安全控制的目的。 K2 控制正转 K3控制反转 K4控制冷却 K5\K6\K7三个备用
2-4:外接开关输入信号
所以的输入信号都经过光电隔离,注:请放心使用,高压信号进入不了主板上损坏电脑,可以有效的保护电脑主板。
限位开关及紧停开关说明
1
5
5
3
7
2
7
:
Q
限位
Q :
70
27
355
1
两个限位串联使用,这样有效节省io 口,请参考。
对应针脚信号说明
开关使用范例,供参考
Q :
70
27
3551
原点开关及主轴检测信号
HOME 检测,最好用一个OMROM 槽式光耦来进行检测,这样检测精度较高。当有一个从高变到低再变高的变化过程才能正常,三个HOME 端口正常状态是高电平。当Z 变为低,再变高时,Z 停止运行,并清零,Y 运行,开关信号变低再变高时,Y 停止运行并清零,然后X 继续重复这个过程。 这个过程就是机床找原点,Mach3的home 就是这个原理
和标准加工中心的原理一样。先是Z 开始回参考点,然后是Y,最后是X 只要你其它设置好了,点一下回参考点按键,它就会自动回。不需要人工干预。
HOME 检测开关建议使用接近开关、光电、霍尔开关等无触点开关。
Q :
70
27
3551
MACH3软件对应设置图片:
1、
设置单位
端口设置:
参照上图设置通讯端口,图示为使用2个并口的设置。
Q :
70
27
3551
图示中,2号端口地址设置见下图:
(我的电脑――右键――属性――设备管理)
点右键――属性,如下图
资源地址;
Q :
70
27
3551
Config motor outputs 电机输出设置
Config input (输入设置)
Q :
70
27
355
1
Config spindle setup (主轴参数设置)
数控机床液压系统设计
摘要 本论文针对目前国内外数控车床的现状、发展动态和发展方向及其在现代工业中的重要作用,运用液压元件的基本理论,对其主关键结构液压系统箱进行了原理分析和优化设。根据设计的实际需要,对车床液压系统开展研究,并对液压系统的结构元件和液压控制系统的结构进行了优化设计。并介绍了一种在三爪卡盘上加装摆动式液压缸和平面螺旋机构的螺旋摆动式液压缸增力机构的结构。叙述了主要的设计步骤和参数的确定。 关键词:数控车床液压油泵液压油缸液压控制阀三爪卡盘性能分析参数优化设计 G RADUATE D ESIGN (T HESIS) 设计(论文)题目:数控机床液压系统设计 指导教师:李洪奎 I
Abstract The present paper in view of the present domestic and foreign numerical control lathe present situation, the development tendency and the development direction and in the modern industry vital role, the utilization hydraulic unit basic theory, has carried on the static analysis and the optimized design to its important structure lathe bed, then achieved the instruction designs and enhances the numerical control lathe technical performance the goal. According to the design actual need, the method of hydraulics systems used in the actual project the related theory and the realization principle has carried on the elaboration, and has carried on the lathe bed champing and drive module design as well as the optimized design. The research process mainly divides into hydraulic system analysis and hydraulic control of the optimization designs, obtained the lathe bed static stress and the strain, and has carried on the optimized design to the lathe bed structure, has carried on a more scientific appraisal to the product. Key word:Numerical control lathe ;Hydraulic pumps ;Hydraulic cylinders ;control valves;performance analysis ;Optimized design II
米特拉空气能热水器家用机说明书
米特拉空气能热水器家用机说明书 米特拉热泵热水器控制器使用说明书 目录 一、序言....................................................................................... 02 二、空气源热水器机组机规格参数表................................................... 03 三、安装....................................................................................... 06 四、保养....................................................................................... 07 五、控制使用说明........................................................................... 08 六、注意事项 (24) 七、产品售后服务保障 (24) 使用本机组之前必须详细阅读本手册,并按照本手册所规定的内容安装,调试,运行;否则造成的任何损失本公司概不负责。 , 热泵热水机组必须由专业技术人员安装 , 在安装机组及其连接水管时,请严格按本说明书进行 , 机组在连接电气线路时,必须找专业人员;机组必须可靠接地,选择符合机组要求的漏电开关。完成机组水管及接线时,须检查无误后再将机组通电源 , 机组在使用过程当中,以防触电,或损坏管路以及机组上的温度传感器,由此造成的人员和财产损失,本公司不负任何责任。本机如有改进,此内容可能有所更改, 届时恕不另行通知 , 机组在维修时,一定要仔细判断机组故障原因,若需要更换部件或充注冷媒时,需 经米特拉客服确认后方可更换或添加米特拉公司指定冷媒。
飞鸿16路舵机控制器使用说明书
FH24路舵机控制器使用说明书 飞鸿科技 2012-5-24 一、产品介绍 (1) 二、功能特点 (3) 三、接口说明 (4) 四、指令说明 (6) 五、16路舵机调试软件使用说明 (7) 二、连接PC上位机 (9) 三、上位机界面编辑 (10) 四、单路舵机调试 (11) 五、动作组编辑 (12) 六、注意事项及故障解决 (13) 产品介绍 一、 一、产品介绍 设计该舵机控制板是为了方便新手学习多路舵机的控制。多路舵机控制并不很复杂,但至今网上关于多路舵机控制的资源很少,当前淘宝上的舵机控制板也都不提供程序代码。由于这些原因,大批的机器人爱好者不能掌握多路舵机控制。使得很多机器人爱好者停滞不前,在这些最基本的地方浪费大量时间,不能不精力放到更高层的机器人控制方面的研究。如果每个人
都从头做起,整体的进步必将非常的缓慢。别人做好的东西我们不妨拿来学习,这样要节省很多的时间与精力。在这个基础上继续前进,做出属于自己的更高级的机器人。 由于本人在这些基础的东西上耗费的大量的精力,导致我没有时间去做高级的控制,如自平衡,语音识别等。大学接近尾声,没能让自己的机器人进一步升级感到非常遗憾。 基于方便学习的原则,本板子的设计有一下几个特点: 1、选用大家熟悉的,容易掌握的51单片机。但不是普通51单片机,是功能强大的增强型单片机STC12C5A60S2。 有人说51控制的精度肯定不如ARM。是的,这是明显的事实。但是我用ARM的芯片来写教程,只能给少数人看,而且如果那个人ARM掌握的都很好了,也不需要看此教程了。该控制板设计的目的就是给机器人初级爱好者学习,仅仅因为这一点,选择51单片机是最恰当不过了。 我最初做的32路舵机控制板就是在arm芯片上做的,那些不适合新手学习,在51上学会了舵机控制的基本方法,等你会使用更高级单片机的时候可以很容易的移植到上面,实现更多舵机,更高精度的控制。 STC12C5A60S2单片机属于增强型51。他兼容传统的51单片机,也就是说,你原来的学习的、编写的51程序不用改动就能在这个单片机上直接使用,不会出现问题,而且速度提高8~12倍。但是它与传统51相比,在速度性能与资源方面都有了很大的提升。 (1)60K的flash程序存储器。89C52只有8K。 (2)1280字节的SRAM。你课本上学的RAM只有128字节。1280足够用了,省去外部扩展的麻烦。 (3)两个串口。 (4)独立波特率发生器。做机器人定时器往往很不够用,而传统51单片机串口通信还要占用定时器,有了独立波特率发生器就可以节省出一个定时器。 (5)PCA模块。可以硬件输出快速PWM。可以扩展出两个定时器。 (6)8路A/D转换通道。A/D转换在机器人、各种比赛中都很常用,使用这款单片机就不必再做AD转换电路。 2、程序下载接口、IO口引出。该板是单片机最小系统板+16路舵机控制板。不是单纯的舵机控制板,而是一款可以用来学习、编程、二次开发的开发板。可以直接用来参加比赛,DIY,毕业设计。 5、详细的教程,丰富的资料。该板子是淘宝中唯一提供程序代码、可以学习的舵机控制板。提供原理图、接口示意图、程序代码、上位机软件。另外购买该产品赠送本人搜集的单片机开发常用工具软件,机器人资料,单片机视频教程以及丰富的例程。
机械机床毕业设计62数控车床刀架及其液压系统的设计
1 引言 1.1毕业设计的背景及目的 制造业是一个国家或地区经济发展的重要支柱,其发展水平标志着该国或地区经济的实力,科技水平,生活水准和国防实力。国际市场的竞争归根到底是各国制造生产能力及机械制造装备的竞争。 随着机械制造生产模式的演变,对机械制造装备提出了不同的要求.在50年代“刚性”生产模式下,通过提高效率,自动化程度,进行单一或少品种的大批量生产,以“规模经济”实现降低成本和提高质量的目的。在70年代主要通过改善生产过程管理来进一步提高产品质量和降低成本。在80年代,较多地采用数控机床,机器人,柔性制造单元和系统等高技术的集成来满足产品个性化和多样化的要求,以满足社会各消费群体的不同要求。从90年代开始,为了对世界生产进行快速响应,逐步实现社会制造资源的快速集成,要求机械制造装备的柔性化程度更高,采用拟实制造和快速成形制造技术[1]。 工业发达国家都非常注重机械制造业的发展,为了用先进技术和工艺装备制造业,机械制造装备工业得到先发展。对比之下,我国目前机械制造业的装备水平还比较落后,表现在大部分工厂的机械制造装备基本上是通用机床加专用工艺装备,数控机床在机械制造装备中的比重还非常低,导致“刚性”强,更新产品速度慢,生产批量不宜太小,生产品种不宜过多;自动化程度基本上还是“一个工人,一把刀,一台机床”,导致劳动生产率低下,产品质量不稳定。因此,要缩小我国同工业发达国家的差距,我们必须在机械制造装备方面大下功夫,其中最重要的一个方面就是增加数控机床在机械制造装备中的比重[1]。 通过这次毕业设计,可以达到以下目的:1,培养综合运用专业基础知识和专业技能来解决工程实际问题的能力;2,强化工程实践能力和意识,提高本人综合素质和创新能力;3,使本人受到从事本专业工程技术和科学研究工作的基本训练,提高工程绘图、计算、数据处理、外文资料文献阅读、使用计算机、使用文献资和手册、文字表达等各方面的能力;4,培养正确的设计思想和工程经济观点,理论联系实际的工作作风,严肃认真的科学态度以及积极向上的团队合作精神。
舵机及舵机的控制
舵机及舵机的控制 1.什么是舵机: 在机器人机电控制系统中,舵机控制效果是性能的重要影响因素。舵机可以在微机电系统和航模中作为基本的输出执行机构,其简单的控制和输出使得单片机系统非常容易与之接口。 舵机是一种位置(角度)伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。目前在高档遥控玩具,如航模,包括飞机模型,潜艇模型;遥控机器人中已经使用得比较普遍。舵机是一种俗称,其实是一种伺服马达。 还是看看具体的实物比较过瘾一点: 2.其工作原理是: 控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。当然我们可以不用去了解它的具体工作原理,知道它的控制原理就够了。就象我们使用晶体管一样,知道可以拿它来做开关管或放大管就行了,至于管内的电子具体怎么流动是可以完全不用去考虑的。 3.舵机的控制: 舵机的控制一般需要一个20ms左右的时基脉冲,该脉冲的高电平部分一般为 0.5ms~2.5ms范围内的角度控制脉冲部分。以180度角度伺服为例,那么对应的控制关 系是这样的:
0.5ms--------------0度; 1.0ms------------45度; 1.5ms------------90度; 2.0ms-----------135度; 2.5ms-----------180度; 请看下形象描述吧: 这只是一种参考数值,具体的参数,请参见舵机的技术参数。 小型舵机的工作电压一般为4.8V或6V,转速也不是很快,一般为0.22/60度或0.18/60度,所以假如你更改角度控制脉冲的宽度太快时,舵机可能反应不过来。如果需要更快速的反应,就需要更高的转速了。 要精确的控制舵机,其实没有那么容易,很多舵机的位置等级有1024个,那么,如果舵机的有效角度范围为180度的话,其控制的角度精度是可以达到180/1024度约0.18度了,从时间上看其实要求的脉宽控制精度为2000/1024us约2us。如果你拿了个舵机,连控制精度为1度都达不到的话,而且还看到舵机在发抖。在这种情况下,只要舵机的电压没有抖动,那抖动的就是你的控制脉冲了。而这个脉冲为什么会抖动呢?当然和你选用的脉冲发生器有关了。一些前辈喜欢用555来调舵机的驱动脉冲,如果只是控制几个点位置伺服好像是可以这么做的,可以多用几个开关引些电阻出来调占空比,这么做简单吗,应该不会啦,调试应该是非常麻烦而且运行也不一定可靠的。其实主要还是他那个年代,单片机这东西不流行呀,哪里会哟! 使用传统单片机控制舵机的方案也有很多,多是利用定时器和中断的方式来完成控制的,这样的方式控制1个舵机还是相当有效的,但是随着舵机数量的增加,也许控制起来就没有那么方便而且可以达到约2微秒的脉宽控制精度了。听说AVR也有控制32个舵机的试验板,不过精度能不能达到2微秒可能还是要泰克才知道了。其实测试起来很简单,你只需要将其控制信号与示波器连接,然后让试验板输出的舵机控制信号以2微秒的宽度递增。
家用空气能热水器说明书指南
凯立信:空气能热水器使用说明书 安装注意事项 一、必须使用220V50Hz交流电源; 二、电器插头、插座必须连接牢固,接地良好; 三、安装室外机必须可靠接地; 四、勿安装在有使用或者存储汽油、化学溶剂等易燃、易爆炸物质的场所,以免发生火灾和爆炸事故。也勿安装在有腐蚀气体或液体的场所,以免影响热水器的使用寿命; 五、必须使用厂家提供的专业电源线,电源软线损坏,、必须由专业人员更换; 六、水箱和室外机安装在墙体和楼面必须能够承受两倍于热水器的重量; 七、清洗保养前,必须切断电源; 八、电源插座的额定电流量应比所选购的热水器的最大电流量大30%以上; 九、必须有专业人员进行安装、维修和保养。 重要提示 一、在搬运过程中,室外机严禁倒置,并尽量避免倾斜搬运,如需倾斜搬运时,倾斜角度必须〈30度; 二、本热水器必须使用自来水,其他水质会影响机组使用寿命,如需使用其他水质可向公司定制; 三、水箱在首次使用或排空后再使用时,必须先注满水,才能通电加热,注水时,须打开热水阀(如装有混水阀,把混水阀调向高温位置)以排出空气,待热水阀有水正常流出时,方可关闭热水阀; 四、在热水器工作期间,安全阀可能会有水珠滴下,这属于正常现象。千万不能将此泄压口堵塞,以免造成水箱内胆胀裂以致损坏; 五、控制面板应注意防晒、防潮,应尽量安装在室内的墙壁上; 六、控制面板已按用水要求设定好,一般不必重新设置,必须要更改出厂设定时请参照控制面板操作说明; 七、不要随意设置高水温,水温设置在45℃-55℃之间最节能,水温设置越高热水器工作效率越低,并且会影响到设备的使用寿命; 八、冬天,在寒冷的结冻地区,长时间不使用,应将水箱内的水排空,以免水
舵机控制板使用说明(中文)
舵机控制板使用说明V1.2 产品特点 ●采用32位ARM 内核的处理器芯片 ●独创的在线升级机制,用户可以在线升级固件 ●自动识别波特率 ●采用USB和UART通讯接口 ●1us的控制精度(相当于舵机的0.09度) ●可以同时同步控制32个舵机(24路舵机控制板可以同时同步控制24个,16路舵机控制板可以同时 同步控制16个舵机) ●内置512K 存储芯片,可存储上百个动作组 ●功能强大的电脑软件(内置3种语言,简体中文、繁体中文、英语) ●拥有Android手机控制软件 供电 舵机控制板需要2个电源: 舵机电源和芯片电源 舵机电源(正极):VS(图中3号位置的蓝色接线端子的左端) 舵机电源(负极):GND(图中3号位置的蓝色接线端子的中间) 舵机电源的参数根据实际所接舵机的参数而定,如TR213舵机的供电电压是4.8-7.2V,那么舵机电源就可以用电压在4.8-7.2V之间的电源。 芯片电源(正极):VSS(图中3号位置的蓝色接线端子的右端)
芯片电源(负极):GND(图中3号位置的蓝色接线端子的中间) VSS的要求是6.5-12V,如果芯片供电是从VSS端口输入的,那么电源的电压必须是6.5-12V之间。 另外: 1. 图中2号位置的USB接口可以给芯片供电,所以USB接口和VSS端口,任选其一即可。 2. 图中1号位置也可以给芯片供电,标记为5V和GND,5V是正极,GND是负极,供电电源的电压必 须是5V。 3. 图中1、2、3号位置都可以给芯片供电,任选其一即可。 4. 图中4号位置的绿色LED灯是芯片电源正常的指示灯,绿色灯亮,表示芯片供电正常,绿色灯灭,表 示芯片供电异常。 5. 图中5号位置的绿色LED灯是舵机电源正常的指示灯,绿色灯亮,表示舵机供电正常,绿色灯灭,表 示舵机供电异常。 如果需要控制舵机,2个绿色的LED灯都亮是前提条件。
数控机床液压传动系统
液压传动系统三级项目 ——机床液压传动系统 学院: 班级: 成员: 指导教师: 日期:2012年6月22日
一、液压传动系统概述 液压传动是用液体作为工作介质来传递能量和进行控制的传动方式。液压传动技术广泛应用于现代机床生产中,我们以数控车床为例,介绍液压传动系统在机床中的应用。 现代数控机床在实现整机的全自动化控制中,除数控系统外,还需要配备液压传动装置来辅助实现整机的自动运行功能。液压传动装置由于使用工作压力高的油性介质,因此机构输出力大,机械机构紧凑,动作平稳可靠,易于调节,噪声较小。 液压传动系统在数控机床中具有如下辅助功能: (1)自动换刀所需的动作。如机械手的伸、缩、回转和摆动及刀具的松开和夹紧动作。 (2)机床运动部件的运动、制动和离合器的控制、齿轮拨叉挂档等。 二、设计机床液压传动系统的依据 (1)机床的总体布局和工艺要求,包括采用液压传动所完成的机床运动种类、机械设计时提出可能用的液压执行元件的种类和型号、执行元件的位置及其空间的尺寸范围、要求的自动化程度等。 (2)机床的工作循环、执行机构的运动方式(移动、转动或摆动),以及完成的工作范围。 (3)液压执行元件的运动速度、调速范围、工作行程、载荷性质和变化范围。(4)机床各部件的动作顺序和互锁要求,以及各部件的工作环境与占地面积等。(5)液压系统的工作性能,如工作平稳性、可靠性、换向精度、停留时间和冲出量等方面的要求。 (6)其它要求,如污染、腐蚀性、易燃性以及液压装置的质量、外形尺寸和经
济性等。 三、设计液压传动系统的步骤 1、明确对液压传动系统的工作要求,是设计液压传动系统的依据,由使用部门以技术任务书的形式提出。 2、拟定液压传动系统图。(1)根据工作部件的运动形式,合理地选择液压执行元件;(2)根据工作部件的性能要求和动作顺序,列出可能实现的各种基本回路。此时应注意选择合适的调速方案、速度换接方案,确定安全措施和卸荷措施,保证自动工作循环的完成和顺序动作和可靠。 液压传动方案拟定后,应按国家标准规定的图形符号绘制正式原理图。图中应标注出各液压元件的型号规格,还应有执行元件的动作循环图和电气元件的动作循环表,同时要列出标准(或通用)元件及辅助元件一览表。 3、绘制液压系统工作图,编制技术文件。 四、设计液压传动系统时应注意问题 1、在组合基本回路时,要注意防止回路间相互干扰,保证正常的工作循环。 2、提高系统的工作效率,防止系统过热。例如功率小,可用节流调速系统;功率大,最好用容积调速系统;经常停车制动,应使泵能够及时地卸荷;在每一工作循环中耗油率差别很大的系统,应考虑用蓄能器或压力补偿变量泵等效率高的回路。 3、防止液压冲击,对于高压大流量的系统,应考虑用液压换向阀代替电磁换向阀,减慢换向速度;采用蓄能器或增设缓冲回路,消除液压冲击。 4、系统在满足工作循环和生产率的前提下,应力求简单,系统越复杂,产生故障的机会就越多。系统要安全可靠,对于做垂直运动提升重物的执行元件应设有平衡回路;对有严格顺序动作要求的执行元件应采用行程控制的顺序动作回路。此外,还应具有互锁装置和一些安全措施。 5、尽量做到标准化、系列化设计,减少专用件设计。 五、数控车床液压系统的原理图
空气能热水器及方案
. 目录 一、重庆丰都中学学生公寓基本情况 (2) 二、技术方案设计说明书 (2) 2.1工程概况 (2) 2.2设计依据和参数 (2) 2.2.1设计依据 (2) 2.2.2设计参数 (2) 2.3设计说明 (3) 2.3.1热水用量计算 (3) 2.3.2热水负荷计算 (3) 2.3.3设备选型计算 (4) 2.4保温水箱容量计算 (4) 2.5用电负荷说明(甲供) (4) 2.6水源说明(甲供) (5) 三、前期投资预算 (6) 四、项目合作方式 (7) 五、校方配合 (8) 六、售后保证 (8) 七、公司基本情况介绍 (9) 八、美的空气源热泵介绍 (13) 8.1. 美的空气源热泵机组介绍 (13) 8.1.1. 概述 (13) 8.1.2. 机组种类 (15) 8.1.3. 系统原理图 (16) 8.1.4. 热水系统简图 (17) 8.1.5. 热水机组参数表 (17) 8.1.6. 热水机组卓越的性能 (19)
一、重庆丰都中学学生公寓基本情况 重庆丰都中学学生公寓目前有学生公寓三栋:其中高中部公寓两栋,初中部公寓一栋。目前学生公寓内仅提供冷水。 二、技术方案设计说明书 2.1工程概况 学生宿舍热水系统设计采用空气源热泵热水系统。初步建议将机组与保温水箱安装在宿舍楼顶(宿舍屋顶承重经原房屋设计单位校核,若无法满足承重再考虑安装于地面)。 2.2设计依据和参数 2.2.1设计依据 现场情况及重庆市历史气候资料 GB50015-2003 《建筑给水排水设计规范》 GB/T50106-2001 《给水排水制图标准》 2.2.2设计参数 重庆冬季最冷月室外平均气温7℃ 冬季最冷月平均冷水水温:5℃ 主机设备配置设计标准:额定工况条件下(环境温度20℃,进水温
数控车床液压系统设计
数控车床液压系统设计 【摘要】本论文针对目前国内外数控车床的现状、发展动态和发展方向及其在现代工业中的重要作用,运用液压元件的基本理论,对其主关键结构液压系统箱进行了原理分析和优化设计。 根据设计的实际需要,对车床液压系统开展研究,并进行了主油箱液压动力站、静压油箱液压动力站及液压卡盘的设计以及优化设计。 并对液压系统的结构元件和液压控制系统的结构进行了优化设计。 【关键词】数控车床、液压油泵、液压油缸、液压控制阀、性能分析、优化设计【ABSTRACT】The present paper in view of the present domestic and foreign numerical control lathe present situation, the development tendency and the development direction and in the modern industry vital role, the utilization hydraulic unit basic theory, has carried on the static analysis and the optimized design to its important structure lathe bed, then achieved the instruction designs and enhances the numerical control lathe technical performance the goal. According to the design actual need, to the lathe bed development research, the method of hydraulics systems used in the actual project the related theory and the realization principle has carried on the elaboration, and has carried on the lathe bed champing and drive module design as well as the optimized design. The research process mainly divides into hydraulic system analysis and hydraulic control of the optimization designs, analyzed the hydraulic tool to use hydraulic power station and hydraulic systems, obtained the lathe bed static stress and the strain, and has carried on the optimized design to the lathe bed structure, has carried on a more scientific appraisal to the product. 【Key word】Numerical control lathe 、Hydraulic pumps 、Hydraulic cylinders 、control valves、performance analysis 、Optimized design
数控机床液压系统维修
数控拉床液压系统的维修与维护 一、液压系统的维修与维护 由于数控机床在生产加工过程中的普遍应用,对数控车床液压系统的维护保养要求标准更高,如果使用维护不当,则严重影响车床的可靠性和使用寿命。目前拉床液压系统存在问题主要有:溜板工作时产生振动;噪声超过85dB;维修困难和维修费用高;耗能大、油温高等问题。造成这几种问题的主要原因是选用的标准液压元件为淘汰产品和有关的液压元件设计不正确。 数控拉床液压技术驱动方式是利用油泵的,在技术上优势特别明显,加工工艺更加精密,并且硬度也有了明显的提高,产品的耐磨性更加好。液压拉床可以加工各种不同形状的零件,如方孔、花键、各种角等等。液压是液压拉床的传动方式,并且传动的方向可以进行变化,并不是单一的,因此具有很好 的灵活性。液压拉床可以实现多种操作方式,使机床和液压形成一体化,在使用功能上有了成倍提升。液压拉床冷却系统有着良好 的构造结构,只要操作正确,不会出现问题。如出现切屑问题,一般均是由于操作不当。要避免操作不当,先要利用正确的切屑方式,把切削液放到容器里面的时候,就要注意不能全部倒满,留有空间可以让切屑充分储存住。否则过多的切屑就会导致车削液的空间被占用,最终导致液面的上升。对于多余的切屑进行清理,维护液压拉床生产的清洁卫生。
另一方面,应注意根据额定拉力来进行具体的拉削作业。因为拉床在生产过程中,拉削能获得较高的尺寸精度和较小的表面粗糙度,提高生产效率。保护好拉刀,因为锋利拉刀可以针对不同形状的拉床进行加工,特别是硬质合金可转位拉刀在拉削效率上更高,更要特别养护。 二、维护保养内容及要求 1日常保养 1.1定期时间:每班班前、班后。1.2作业时间:各15分钟内。1.3班前 1.3.1擦干净外露导轨、活塞杆尘土及油污。132按润滑规定 注油。1.3.3空车试运转。 1.3.4检查油泵压力、油缸工作情况。 1.4班后 1.4.1清理拉屑。 1.4.2擦拭拉床各部外表。1.4.3机床各部位归位。2 一级保养 2.1定期时间:每季度一次。2.2作业时间:4小时内。2.3外表 2.3.1擦拭机床外表,罩盖及附件,达到内外清洁,无锈蚀,无黄袍。2.3.2检查补齐螺钉、螺母、手柄(球)、油杯等。2.4工作台、拖板与导轨。
空气能热水器使用说明书
空气源热泵热水器原理 由生活中的常识中我们可以知道,热水可以自己慢慢向空气中放热,冷却成凉水, 这表明热量可以从温度高的物体一一热水自动的传递到温度低的物体一一空气。那么可不可以将这个过程反过来进行,将温度较低的空气中的能量向热水中转移呢?热力学第二定律指出:不可能把热从低温物体传到高温物体而不引 起其他变化。这就是说,热量能自发的从高温物体传向低温物体,而不能自发地从低温物体传向高温物体。但这并不是说热量就不能从低温物体传向高温物体,就向水泵能够使水从低处流向高处一样,热泵通过消耗一部分电能,也能够使热量从低温物体传到高温物体。空气源热泵热水器就是根据这样一个原理 来工作的,通过消耗少量的电能驱动压缩机,使制冷剂吸收空气里的热量来加热生活用热水的,其制热效果比传统热水器高出3倍,而消耗的电能仅为普通热水器的三分之一,并能从根本上杜绝了漏电、一氧化碳中毒的危险 电能输入一1 热水岀一 lili 冷水进 热泵工作流程图 热泵热水器的工作过程如下:如上图所示,压缩机通过消耗一部分电能,将低温低压的制冷剂气体压缩成高温高压的气体,高温高压的气体在冷凝器中放出热量将水加热,自己温度被降低,经过膨胀阀节流降压后,变成低温低压的气液混合物,在蒸发器中制冷剂吸收其他介质(如空气、井水)中的热量,变成低温低压的气体,然后再被压缩机吸收,压缩成高温高压的气体加热热水。 与其他形式的热水器相比,热泵热水器主要有安全、节能、环保的特点。 安全性: 传统热水器以燃气、电和太阳能为主,三分天下,燃气热水器安全性较差, 燃烧不充分和水压不稳定易造成燃气中毒和烫伤事件,电热水器的漏电隐患和住宅接地不良也对消费者的生命安全造成严重威胁,太阳能热水器储水式的特点决定了其在晴天时,水温可能很高,造成烫伤,阴雨天的电辅助加热却留下安全隐患,与以上热水器不同,热泵热水器制热过程是通过压缩机排出的高温高压制冷剂气体加热水罐中的水,电主要用于压缩机,制热后的气体通过外盘式的盘管与搪瓷水罐中的水交换热量,水电完全分离,
数控机床主轴卡盘液压装置设计
摘要 在现代的工业生产过程中,数控车床得到了大量的运用,而我国也在这个领域得到了长足的发展。数控车床主要包括电气系统、液压系统以及机械部分。本课题则是主要介绍了典型的液压系统主要方向以及办法,应此本课题的研究具有重要的现实意义。 关键词:数控机床;液压系统;
Abstract In the modern industrial production process, the numerical control lathe obtained the massive utilization, but our country also obtained the considerable development in this domain. The numerical control lathe mainly includes the electrical system, the hydraulic system as well as the machine part.This topic introduces the typical direction as well as the way of the hydraulic system, should the study of this topic has important practical significance. Key words: Numerical control engine bed;Hydraulic system;
绪论...................................... ................................................................................. .. (4) 第一章主轴卡盘工作原理的设计、优势及意义................................... ........... (5) 1.1 工作原理.................................................... .............. .. (5) 1.2 设计优势.............................................. .......... .......... .......... .......... .......... . (6) 1.3 设计意义........................................... .......... .......... .......... .......... .......... . (7) 第二章.CK6152数控机床液压系统设计的立题依据及方案论证 (7) 2.1液压系统设计的立题依据及课题来源 (7) 2.2液压系统方案的制定与论证................................. ............................ ..... (8) 第三章.CK6152数控机床液压系统工况分析............ .............. .............. ............... . (10) 3.1液压系统的运动分析 (10) 3.2液压系统的负载分析 (11) 第四章.CK6152数控机床液压系统设计计算 (11) 4.1 CK6152数控机床液压系统的设计要求.................... ............................... . (11) 4.2CK6152机床液压系统选型 (12) 4.3确定液压缸参数计算与结构设计...................... (13) 4.4液压元件和装置的选择...................... ........... .............. . (19) 第五章.液压控制装置集成块的设计.......................... .. (20) 5.1液压控制装置的总体设计............................. ........... .. (20) 5.2通道体设计的技术要求 (20) 5.3 通道体设计...................................................................... .. (20) 5.4叠加阀的选择............................ ................ (21) 第六章.液压站的设计 (21) 6.1液压油箱的设计............................. ........... ......................... ....... .. (21) 6.2泵-电动机装置的选择..................... ............. (23) 6.3液压站的结构设计........................................................... .. (25) 第七章.液压系统的验算 (26) 结论 (26) 致谢 (27) 参考文献 (27)
舵机原理及其使用详解
舵机的原理,以及数码舵机VS模拟舵机 一、舵机的原理 标准的舵机有3条导线,分别是:电源线、地线、控制线,如图2所示。 以日本FUTABA-S3003型舵机为例,图1是FUFABA-S3003型舵机的内部电路。 3003舵机的工作原理是:PWM信号由接收通道进入信号解调电路BA6688的12脚进行解调,获得一个直流偏置电压。该直流偏置电压与电位器的电压比较,获得电压差由BA6688的3脚输出。该输出送入电机驱动集成电路BAL6686,以驱动电机正反转。当电机转动时,通过级联减速齿轮带动电位器Rw1旋转,直到电压差为O,电机停止转动。 舵机的控制信号是PWM信号,利用占空比的变化,改变舵机的位置。 有个很有趣的技术话题可以稍微提一下,就是BA6688是有EMF控制的,主要用途是控制在高速时候电机最大转速。 原理是这样的:
收到1个脉冲以后,BA6688内部也产生1个以5K电位器实际电压为基准的脉冲,2个脉冲比较以后展宽,输出给驱动使用。当输出足够时候,马达就开始加速,马达就能产生EMF,这个和转速成正比的。 因为取的是中心电压,所以正常不能检测到的,但是运行以后就电平发生倾斜,就能检测出来。超过EMF 判断电压时候就减小展宽,甚至关闭,让马达减速或者停车。这样的好处是可以避免过冲现象(就是到了定位点还继续走,然后回头,再靠近) 一些国产便宜舵机用的便宜的芯片,就没有EMF控制,马达、齿轮的机械惯性就容易发生过冲现象,产生抖舵 电源线和地线用于提供舵机内部的直流电机和控制线路所需的能源.电压通常介于4~6V,一般取5V。注意,给舵机供电电源应能提供足够的功率。控制线的输入是一个宽度可调的周期性方波脉冲信号,方波脉冲信号的周期为20ms(即频率为50Hz)。当方波的脉冲宽度改变时,舵机转轴的角度发生改变,角度变化与脉冲宽度的变化成正比。某型舵机的输出轴转角与输入信号的脉冲宽度之间的关系可用围3来表示。
数控机床液压系统的保养与维护
数控机床液压系统的保养与维护 一、选择适合的液压油 液压油在液压系统中起着传递压力、润滑、冷却、密封的作用,液压油选择不恰当就是液压系统早期故障与耐久性下降的主要原因。应按随机《使用说明书》中规定的牌号选择液压油,特殊情况需要使用代用油时,应力求其性能与原牌号性能相同。不同牌号的液压油不能混合使用,以防液压油产生化学反应、性能发生变化。深褐色、乳白色、有异味的液压油就是变质油,不能使用。 二、防止固体杂质混入液压系统 清洁的液压油就是液压系统的生命。液压系统中有许多精密偶件,有的有阻尼小孔、有的有缝隙等。若固体杂质入侵将造成精密偶件拉伤、发卡、油道堵塞等,危及液压系统的安全运行。一般固体杂质入侵液压系统的途径有:液压油不洁;加油工具不洁;加油与维修、保养不慎;液压元件脱屑等。可以从以下几个方面防止固体杂质入侵系统: 1加油时 液压油必须过滤加注,加油工具应可靠清洁。不能为了提高加油速度而去掉油箱加油口处的过滤器。加油人员应使用干净的手套与工作服,以防固体杂质与纤维杂质掉入油中。 2 保养时 拆卸液压油箱加油盖、滤清器盖、检测孔、液压油管等部位,造成系统油道暴露时要避开扬尘,拆卸部位要先彻底清洁后才能打开。如拆卸液压油箱加油盖时,先除去油箱盖四周的泥土,拧松油箱盖后,清除残留在接合部位的杂物(不能用水冲洗以免水渗入油箱),确认清洁后才能打开油箱盖。如需使用擦拭材料与铁锤时,应选择不掉纤维杂质的擦拭材料与击打面附着橡胶的专用铁锤。液压元件、液压胶管要认真清洗,用高压风吹干后组装。选用包装完好的正品滤芯(内包装损坏,虽然滤芯完好,也可能不洁)。换油时同时清洗滤清器,安装滤芯前应用擦拭材料认真清洁滤清器壳内底部污物。 三、液压系统的清洗 清洗油必须使用与系统所用牌号相同的液压油,油温在45~80℃之间,用大流量尽可能将系统中杂质带走。液压系统要反复清洗三次以上,每次清洗完后,趁油热时将其全部放出系统。清洗完毕再清洗滤清器、更换新滤芯后加注新油。
CKJ61100数控车床液压系统设计毕业论文
CKJ61100数控车床液压系统设计毕业论文 目录 引言 (2) 第一章液压系统设计计算 (2) 1.1液压系统的设计要求 (2) 1.2液压系统方案设计 (2) 1.2.1确定液压泵类型及调速方式 (2) 1.2.2选用执行原件 (2) 1.2.3换向回路和压力回路的选择 (2) 1.2.4组成液压系统绘原理图 (2) 1.3液压系统的参数计算 (2) 1.3.1液压缸参数计算 (2) 1.3.2液压缸的结构设计 (2) 1.3.3液压泵性能参数计算 (2) 1.4液压元件的选择 (2) 1.4.1液压阀及过滤器的选择 (2) 1.4.2油管的选择 (2) 1.4.3油箱容积的确定 (2) 第二章液压站的设计 (2) 2.1液压油箱的作用及外形尺寸 (2) 2.1.1液压油箱的作用 (2)
2.1.2液压油箱的外形尺寸 (2) 2.2液压油箱的结构设计 (2) 2.3液压泵装置 (2) 2.3.1液压泵的工作原理 (2) 2.3.2液压控制装置 (2) 2.4液压系统的安装 (2) 2.4.1液压泵装置的安装要求 (2) 2.4.2油箱装置的安装要求 (2) 2.4.3液压阀的安装要求 (2) 2.4.4液压缸的安装要求 (2) 2.5电动机与液压泵的联接方式 (2) 第三章集成块的设计 (2) 3.1集成块及其工作 (2) 3.2集成块的工作要求 (2) 3.2.1集成块的工作要求 (2) 3.2.3集成块的总体设计 (2) 3.2.4液压阀位置的确定 (2) 3.2.5视图及尺寸标注 (2) 3.2.6加工精度的要求 (2) 3.2.7集成块的设计结果 (2) 3.2.8集成块装配与调试 (2) 第四章液压系统的性能验算及维护 (2)
数控机床液压系统的维修与维护解读
数控机床液压系统的维修与维护 一选择适合的液压油 液压油在液压系统中起着传递压力、润滑、冷却、密封的作用,液压油选择不恰当是液压系统早期故障和耐久性下降的主要原因。应按随机《使用说明书》中规定的牌号选择液压油,特殊情况需要使用代用油时,应力求其性能与原牌号性能相同。不同牌号的液压油不能混合使用,以防液压油产生化学反应、性能发生变化。深褐色、乳白色、有异味的液压油是变质油,不能使用。 二防止固体杂质混入液压系统 清洁的液压油是液压系统的生命。液压系统中有许多精密偶件,有的有阻尼小孔、有的有缝隙等。若固体杂质入侵将造成精密偶件拉伤、发卡、油道堵塞等,危及液压系统的安全运行。一般固体杂质入侵液压系统的途径有:液压油不洁;加油工具不洁;加油和维修、保养不慎;液压元件脱屑等。可以从以下几个方提高加油速度而去掉油箱加油口处的过滤器。加油人员应使用面防止固体杂质入侵系统:
1 加油时液压油必须过滤加注,加油工具应可靠清洁。不能为了干净的手套和工作服,以防固体杂质和纤维杂质掉入油中。 2 保养时拆卸液压油箱加油盖、滤清器盖、检测孔、液压油管等部位,造成系统油道暴露时要避开扬尘,拆卸部位要先彻底清洁后才能打开。如拆卸液压油箱加油盖时,先除去油箱盖四周的泥土,拧松油箱盖后,清除残留在接合部位的杂物(不能用水冲洗以免水渗入油箱),确认清洁后才能打开油箱盖。如需使用擦拭材料和铁锤时,应选择不掉纤维杂质的擦拭材料和击打面附着橡胶的专用铁锤。液压元件、液压胶管要认真清洗,用高压风吹干后组装。选用包装完好的正品滤芯(内包装损坏,虽然滤芯完好,也可能不洁)。换油时同时清洗滤清器,安装滤芯前应用擦拭材料认真清洁滤清器壳内底部污物。 三液压系统的清洗 清洗油必须使用与系统所用牌号相同的液压油,油温在45?80 C之间,用大流量尽可能将系统中杂质带走。液压系统要反复清洗三次以上,每次清洗完后,趁油热时将其全部放出系统。清洗完毕再清洗滤清器、更换新滤芯后加注新油。防止空气和水入侵液压系统. 四防止空气入侵液压系统 在常压常温下液压油中含有容积比为6?8%的空气,当压力