控制工程基础第三版机械工业出版社课后答案解析
控制工程基础习题解答
第一章
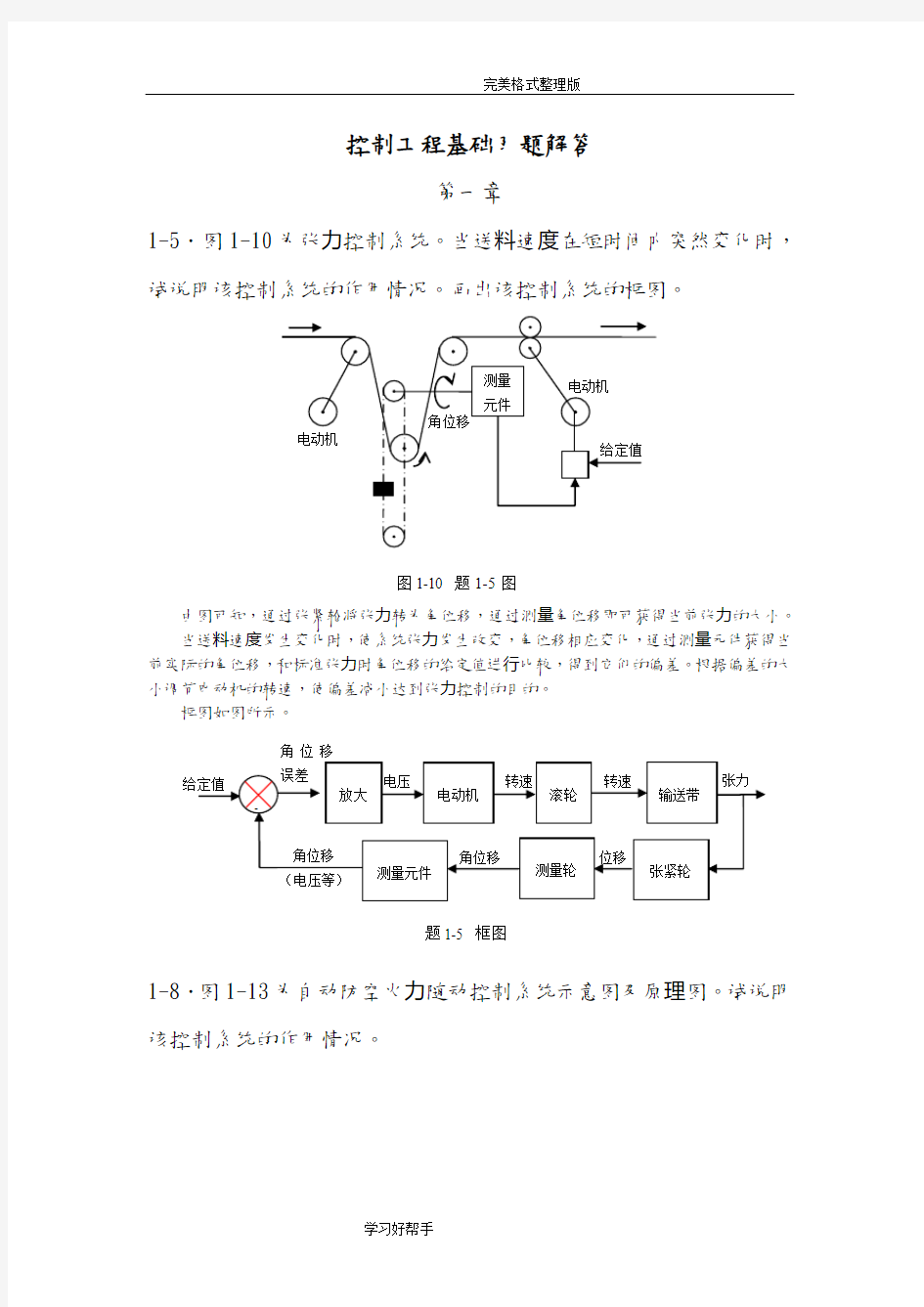
1-5.图1-10为张力控制系统。当送料速度在短时间内突然变化时,试说明该控制系统的作用情况。画出该控制系统的框图。
图1-10 题1-5图
由图可知,通过张紧轮将张力转为角位移,通过测量角位移即可获得当前张力的大小。
当送料速度发生变化时,使系统张力发生改变,角位移相应变化,通过测量元件获得当前实际的角位移,和标准张力时角位移的给定值进行比较,得到它们的偏差。根据偏差的大小调节电动机的转速,使偏差减小达到张力控制的目的。
框图如图所示。
角位移
题1-5 框图
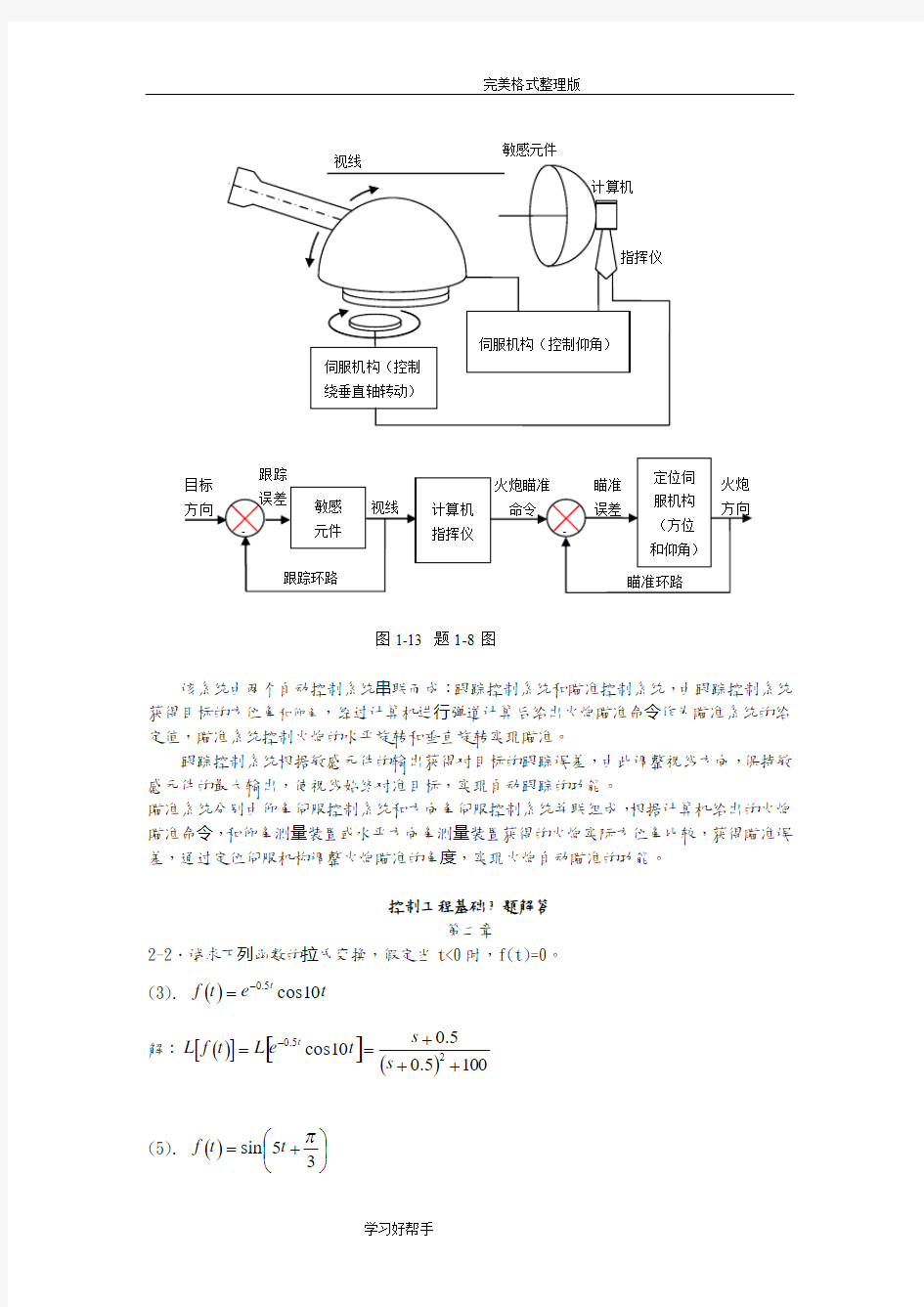
1-8.图1-13为自动防空火力随动控制系统示意图及原理图。试说明该控制系统的作用情况。
该系统由两个自动控制系统串联而成:跟踪控制系统和瞄准控制系统,由跟踪控制系统
获得目标的方位角和仰角,经过计算机进行弹道计算后给出火炮瞄准命令作为瞄准系统的给定值,瞄准系统控制火炮的水平旋转和垂直旋转实现瞄准。
跟踪控制系统根据敏感元件的输出获得对目标的跟踪误差,由此调整视线方向,保持敏感元件的最大输出,使视线始终对准目标,实现自动跟踪的功能。 瞄准系统分别由仰角伺服控制系统和方向角伺服控制系统并联组成,根据计算机给出的火炮瞄准命令,和仰角测量装置或水平方向角测量装置获得的火炮实际方位角比较,获得瞄准误差,通过定位伺服机构调整火炮瞄准的角度,实现火炮自动瞄准的功能。
控制工程基础习题解答
第二章
2-2.试求下列函数的拉氏变换,假定当t<0时,f(t)=0。 (3). ()t e
t f t
10cos 5.0-=
解:()[][
]
()100
5.05
.010cos 2
5.0+++=
=-s s t e L t f L t
(5). ()??
?
?
?+
=35sin πt t f 图1-13 题1-8图
敏感元件
解:()[]()
25
2355cos 235sin 2135sin 2
++=??????+=???
?????? ?
?+
=s s
t t L t L t f L π
2-6.试求下列函数的拉氏反变换。
(4).()()()
2
222
522+++++=s s s s s s F
解:()[]()()?
?????+++++=??
????+++++=---222222252321
1221
1
s s k s k s k L s s s s s L s F L
()()
()2222222
52
21-=-=+??
????+++++=s s s s s s s k ()(
)(
)
3
3
31331222222513223222
232==-=---=-+---=++??
????+++++=--=+k k j
j
j
jk k k j s s s s s s s s j s k s k ()[]()()t e e s s s L s s s s L s F L t
t cos 32111322223322221211-----+-=??
????+++++-=?
?????+++++-=
(8).()5
22+-=s s s s F
解:
()[]()()t e t e s s s L s s s L s F L t
t 2cos 2sin 2121121221522222211
1
+=??????+--++-=???
?????+-=---
2-13试求图2-28所示无源网络传递函数()
()s
U s U i 0。 解:
b). 用等效阻抗法做: 拉氏变换得:
C b)
图2-28 题2-13图
()()()()i i U s R C s R C s R C s R C s R C U R s C R s
C s C R R s
C U 11111
111
22111222112
21111
2
20+++++=++++=传递函数为:
()()()
()()
11112211122211+++++=
s R C s R C s R C s R C s R C s G
2-16试求图2-30所示有源网络传递函数()
()
s U s U i 0。 解:
1
2124221242231321341232433121
13232430
13243123243312113232
430
11
1111R U s R C s R R C C s C R s
C R I R U I C C sI R C R I s C R I I I I R U I R I I s
C R I U R u dt dt i C R i d C R dt i C R i i i i R
u i R i dt i C R i u i i
i i
i +++=
??????????
??
?
=+++
+==---=??????
?
???
???
=???? ??++++==---=??? 1212
42212422212422124211R U s
R C s R R C C s C R s C R s R C s R R C C s C R I i
+++++++= 1
242124221322422322433212432211
32124221242221242212422421242212422011111R U s C R s R C s R R C C R R s C R R s C R R s C R R s R R C s R R R C C R U R s R C s R R C C s C R s C R s R C s R R C C s C R s C s C R s R C s R R C C s C R s C R U i
i
???? ??+++++++++-=???? ??++++++++++++-=
图2-30 题2-16图
b)
()()()
()13
224122
2142322431322322422322143201
1
R R R s C R C R s C C R R s R R C R R C R R C R R C R R s R R C C R R R s U s U i +++++++++++-=
2-17.组合机车动力滑台铣平面时,当切削力F i (t )变化时,滑台可能产生振动,从而降低被加工工件的切削表面质量。可将动力滑台连同铣刀抽象成如图所示的质量-弹簧-阻尼系统的力学模型。其中m 为受控质量,k 1,k 2分别为铣
刀系统,x 0(t )为输出位移。试建立数学模型。 解:微分方程为:
()()()()()()()()()()t x
f t x k t x t x k t x
m t x t x k t F i 0010121012 +=-=--
拉氏变换得:
()()s X k fs k k k fs ms s F i 012212???
?
??++++=
传递函数为:
()()2
1222132
k k fs k ms k k mfs k s G ++++=
2-25.试求图2-39a 所示机械系统的传递函数,画出其函数框图,与图2-39b 进行比较。 解1:微分方程为:
图2-31 题2-17图
θ1(t)b)
图2-39 题2-25图
()()()()()()()()()()()()
t J t f t t k t J t t k t t k i ?
??
?
?=--=---0200121101211θθθθθθθθθ
拉氏变换得:
()()()s k s k k k fs s J k k k k fs s J s J i Θ=Θ???
? ??-++++++102222221222221
传递函数为:
()()()2
1212221221314212
1k k fs k k s J k J k J k s fJ s J J k k s G +++++++=
解2:画出框图如图所示,通过框图简化可得传递函数为:
()()()2
1212
221221314212
1k k fs k k s J k J k J k s fJ s J J k k s G +++++++=
θi (t)
2-28.化简图2-42所示各系统框图求传递函数。
c).
c)
图2-42 题2-28图
()41
21232123
211G H G G H G G H G G G G s --++=
φ
第三章
3-2.假设温度计可用1/(Ts+1)传递函数描述其特性。现用该温度计测量某容器中的水温,发现经1min 后才能指示出实际水温的96%,问:
(1). 该温度计的指示从实际水温的10%变化到90%所需的时间是多少? (2). 如果给该容器加热,使容器内水温以0.1℃/s 的速度均匀上升,当定义
误差e(t)=r(t)-c(t)时,温度计的稳态指示误差有多大? 解:
(1). 设实际水温为T r ,温度计原来处于0度,当温度计放入水中时,相当于
输入一阶跃值为T r 的阶跃函数,温度计的时间响应函数为:()???
? ?
?-=-T
t r e
T t c 1, 根据题意可得:T
e 60196.0--=
即可得:T=18.64(s),()???
? ??-=-64.181t r e T t c 10%所需的时间为64.181
11.0t e --=,()s t 96.11=。 90%所需的时间为64
.18119.0t e
-
-=,()s t 92.422=。
所以可得该温度计的指示从实际水温的10%变化到90%所需的时间(上升时间)是
()s t t t r 96.4012=-=
(2). 由题可知系统为一阶系统,故系统稳定,为求当r(t)=0.1t 时的稳态误
差,由一阶系统的时间响应分析可知,单位斜坡响应的稳态误差为T ,所以稳态指示误差:()C T t e t 864.11.0lim =?=∞
→
(将1/(Ts+1)转化为开环传递函数为1/(Ts )时的单位反馈系统,则可见此时系统的误差为e(t)=r(t)-c(t)。根据系统为I 型,
可得稳态速度误差系数为Kv=K=1/T ,得当输入信号为r(t)=0.1t 时的稳态误差为C T K e v
ssv 864.11.01
1.0=?=?
=) 3-5.某控制系统如图3-24所示,已知K=125,
试求:
(1). 系统阶次,类型。
(2). 开环传递函数,开环放大倍数。 (3). 闭环传递函数,闭环零点、极点。
(4). 自然振荡频率ωn ,阻尼比ζ,阻尼振荡频率ωd 。 (5). 调整时间t s (△=2%),最大超调量σp %。
(6). 输入信号r(t)=5时,系统的输出终值c(∞)、输出最大值c max 。 (7). 系统的单位脉冲响应。 (8). 系统的单位斜坡响应。 (9). 静态误差系数K p 、K v 、K a 。 (10). 系统对输入为r(t)=5+2t+t 2时的稳态误差。
解:
(1). 系统的开环传递函数:()()()()()
125.05625
.1125.00125.0442.0+=+=+=
s s s s K s s K s H s G ,
可见系统阶次为二阶,类型为I 型。
图3-24
题3-5图
(2). 开环传递函数()()()
125.05625
.1+=s s s H s G ,开环放大倍数为1.5625
(3). 闭环传递函数为:
()()()()2
22
25.25.28.025.255625.125.08125.71+??+?=++=+=Φs s s s s H s G s G s ,闭环没有
闭环零点,闭环极点为:j s 5.122,1±-= (4). 5.2=n ω,8.0=?,5.112=-=?ωωn d (5). 24
==
n
s t ?ω,015.0%2
1==--
??πσe
p
(6). 因为标准型二阶系统单位阶跃信号的稳态输出为1,最大值为1+M p =1+σ
p
%=1.015,由于线性系统符合叠加原理,所以可得:()5=∞c *5=25,
c max =5*5*1.015=25.375
(7). 由于标准型欠阻尼二阶系统的单位阶跃响应为:
()???
?
??-+--
=-??
ω?
?ω22
1arctan sin 111t e
t c d t
n 所以系统单位阶跃响应为:()()??
?
???+-=-6435.05.1sin 35152t e t c t
利用线性系统的重要特征即可得单位脉冲响应:
()()()()t
e t e t e t e dt t dc t c t t
t t 5.1sin 833.205.1sin 6
1256435.05.1cos 5.26435.05.1sin 31052222----==
??
?
???+-+==δ
(8). 同理可得单位斜坡响应:
()()()()()()C
t e t C
t e t e t C
t e t e t dt
t e dt t c t c t t t t t t v +++=+++=+++++=??
?
???+-==------??287.15.1sin 310
55.1cos 516
5.1sin 151456435.05.1cos 26435.05.1sin 38
56435.05.1sin 3515222222 积分常数C 由初始状态为零的条件而得,即
()()0
2287.15.1sin 310500=-???
???+++==t t v C t e t c
可得C=-3.2,所以单位斜坡响应为:
()()2
.3287.15.1sin 3
10
52.35.1cos 5
16
5.1sin 15145222-++=-++
=---t e t t e t e t t c t t t v
(9). 由于系统为I 型,所以其静态误差系数分别为:
K p =∞ K v =1. 5625 K a =0 (10).
系统对输入为r(t)=5+2t+t 2时的稳态误差为:
系统是二阶系统,开环传递函数中的系数均大于零(或由闭环传递函数中可知极点的实部小于零),所以系统稳定
∞=???
? ??+++?=a v p ss K K K e 12
121155
3-16.已知开环系统的传递函数如下(K>0),试,用罗斯判据判别其闭环稳定性,
并说明系统在s 右半平面的根数及虚根数。 (1). ()()()()()321+++=
s s s s K s H s G (6). ()()()
24
82
2++=s s s K
s H s G 解:
(1). 特征方程为()06523=++++K s K s s
K
K
K K
s s s s 0
5465610
12
3
++
当K>0时,则第一列的符号全部大于零,所以闭环稳定,系统在s 右半平面的根数及虚根数均为0。
(6). 特征方程为0248234=+++K s s s
K
K
K
K s s s s s 3240824101234
-
当K>0时,第一列有一个数小于零,所以闭环不稳定;第一列符号变化了两次,系统在s 右半平面的根数为2;第一列没有等于0的数,虚根数为0。
3-19.单位反馈系统的开环传递函数为()()()()()
3210+++=s s s a s s H s G ,试求: (1). 系统稳定的a 值;
(2). 系统所有特征根的实部均小于-1之a 值。 (3). 有根在(-1,0)时之a 值。
解:
闭环传递函数为()()a
s s s a s s 10165102
3++++=
φ (1). 用罗斯判据可得:
a
a a s s s s 1021610516
101
2
3- 系统稳定,则应:?
??≥≥-0100
216a a ,即a 值应为:80≤≤a
(2). 令11+=s s ,即11-=s s ,此时当()0Re 1≤s 时,则()1Re -≤s 。对闭环传
递函数进行变换得:
()()12
109211012
13
1111-+++-+=
a s s s a s s φ
12
1051512102910
11
12
1
3
1
---a a a s s s s 系统稳定,则应:???≥-≥-012100
515a a ,此时()0Re 1≤s ,()1Re -≤s 。即a 值应为:
32.1< (3). 由(1)和(2)可得,此时a 应在(0,1.2)和(3,8)之间。 3-27.已知系统的结构如图3-34所示。 (1). 要求系统动态性能指标σp %=16.3%,t s =1s ,试确定参数K 1、K 2的值。 (2). 在上述K 1、K 2之值下计算系统在r(t)=t 作用下的稳态误差。 解: 系统的开环传递函数为: ()()()? ?? ? ??+++=++= 11101 1 10101101022121 s K s K K K s s K s G 系统的闭环传递函数为: ()()1 22 1 1011010K s K s K s +++= φ 1 2110211010K K K n += =?ω (1). %3.16%2 1==-- ??πσe p 得:121021105.0K K += =? 5%时:11106 1021101033 21 21 =+=+= = K K K K t n s ?ω 得:5.02=K ,则:6.31±=K ,由系统传递函数可知,系统稳定K 1应大于零,所以6.31=K 此时: () 5 .0/6==?ωs rad n 图3-34 题3-27图 2%时:11108 102 1101044 21 21 =+=+= = K K K K t n s ?ω 得:7.02=K ,则:4.61±=K ,由系统传递函数可知,系统稳定K 1应大于零,所以4.61=K 。此时: () 5 .0/8==?ωs rad n (2). 系统的开环传递函数为:()? ?? ? ??+++= 111011 1010221s K s K K s G 系统是二阶系统,闭环(或开环)传递函数中的系数均大于零(或由闭环传递函数中可知极点的实部小于零),所以系统稳定 系统为I 型K K e v ssv 1 1== 当6.31=K ,5.02=K 时,开环放大增益为: 6 1 101021 =+= K K K 6 11== K e ssv 当4.61=K ,7.02=K 时,开环放大增益为: 81101021=+= K K K 8 1 1==K e ssv 4-2.设开环系统的零点、极点在s 平面上的分布如图4-15所示,试绘制根轨迹草图。 图4-15 题4-2图 解: 4-3.已知单位反馈系统的开环传递函数如下,试绘制当增益K1变化时系统的根轨迹图。 (1). ()()() 521 ++= s s s K s G (2). ()() 10 22212+++=s s s K s G 解: (1). 开环极点为5,2,0321-=-==p p p 无有限开环零点。示如图 法则2:有三条趋向无穷的根轨迹。 法则3:实轴上的根轨迹:0~-2,-5~-∞。 法则4:渐近线相角:()()0q 1 q 60 180312180 12180 a ==???±=+±=-+±= q m n q ? 法则5:渐近线交点:33.23 7 3520 11 a -≈-=--= --=∑∑==m n z p n i m j j i σ,得渐近线如图示。 法则6:分离点:()()() s s s s s s K 107522 3 1++-=++-= () () 0101431072231=++-=++-=s s ds s s s d ds dK 得:3 19 761034141422 ,1±-=??-±-=s , 其中88.03 19 71-=+-= s 为实际分离点,如图示。 法则8:虚轴交点:令ωj s =代入特征方程010712 3 =+++K s s s ,得: 0107123=++--K j j ωωω ???=+-=+-0 70 1012 3K j j ωωω ? ? ?=±≈±=7016 .3101K ω 综上所述,根轨迹如图红线所示。 (2). ()()10 222 12+++= s s s K s G 开环极点为31 j p ±-= 法则2:有1条趋向无穷的根轨迹。 法则3:实轴上的根轨迹: -2~-∞。 法则6:分离点:2 10 221+++-=s s s K ()()()() 026 4210222222221=+-+-=+---++-=s s s s s s s s ds dK 得:?? ?-≈±-=?+±-=16 .516.110226 44422 ,1s , 其中16.51-=s 为实际分离点,如图示。 法则7:出射角: 4.18901 23 arctan -=--=-= ∑∑p z θθ? 得() 6.161121801=++±=??q p 法则1:对称性可得: 6.1612-=p ? 综上所述,根轨迹如图红线所示。 4-9 已知某单位负反馈系统的开环传递函数为 ()() 45 1421 ++= s s s K s G (1) 系统无超调的K 1值范围。 (2) 确定使系统产生持续振荡的K 1值,并求此时的振荡频率 解: 开环极点为? ? ?--=±-==95 27,03,21p p 渐近线相角:()()0 q 1q 60180312180 12180 a ==???±=+±=-+±= q m n q ? 渐近线交点:67.43 14 3950 11 a -≈-=--= --=∑∑==m n z p n i m j j i σ。 (1) 分离点:( ) s s s K 45142 3 1++-= () 04528321 =++-=s s ds dK 得:? ??--≈±-=??-±-=27.706.23611464534282822 ,1s , 其中06.21-=s 为实际分离点, 控制工程基础习题解答 第一章 1-1.控制论的中心思想是什么?简述其发展过程。 维纳(N.Wiener)在“控制论——关于在动物和机器中控制和通讯的科学”中提出了控制论所具有的信息、反馈与控制三个要素,这就是控制论的中心思想 控制论的发展经历了控制论的起步、经典控制理论发展和成熟、现代控制理论的发展、大系统理论和智能控制理论的发展等阶段。具体表现为: 1.1765年瓦特(Jams Watt)发明了蒸汽机,1788年发明了蒸汽机离心式飞球调速器,2.1868年麦克斯威尔(J.C.Maxwell)发表“论调速器”文章;从理论上加以提高,并首先提出了“反馈控制”的概念; 3.劳斯(E.J.Routh)等提出了有关线性系统稳定性的判据 4.20世纪30年代奈奎斯特(H.Nyquist)的稳定性判据,伯德(H.W.Bode)的负反馈放大器; 5.二次世界大仗期间不断改进的飞机、火炮及雷达等,工业生产自动化程度也得到提高; 6.1948年维纳(N.Wiener)通过研究火炮自动控制系统,发表了著名的“控制论—关于在动物和机器中控制和通讯的科学”一文,奠定了控制论这门学科的基础,提出 了控制论所具有的信息、反馈与控制三要素; 7.1954年钱学森发表“工程控制论” 8.50年代末开始由于技术的进步和发展需要,并随着计算机技术的快速发展,使得现代控制理论发展很快,并逐渐形成了一些体系和新的分支。 9.当前现代控制理论正向智能化方向发展,同时正向非工程领域扩展(如生物系统、医学系统、经济系统、社会系统等), 1-2.试述控制系统的工作原理。 控制系统就是使系统中的某些参量能按照要求保持恒定或按一定规律变化。它可分为人工控制系统(一般为开环控制系统)和自动控制系统(反馈控制系统)。人工控制系统就是由人来对参量进行控制和调整的系统。自动控制系统就是能根据要求自动控制和调整参量的系统,系统在受到干扰时还能自动保持正确的输出。它们的基本工作原理就是测量输出、求出偏差、再用偏差去纠正偏差。 1-3.何谓开环控制与闭环控制? 开环控制:系统的输出端和输入端之间不存在反馈回路,输出量对系统的控制作用没有影响。系统特点:系统简单,容易建造、一般不存在稳定性问题,精度低、抗干扰能力差。 闭环控制:系统的输出端和输入端存在反馈回路,输出量对控制作用有直接影响。闭环的反馈有正反馈和负反馈两种,一般自动控制系统均采用负反馈系统,闭环控制系统的特点:精度高、抗干扰能力强、系统复杂,容易引起振荡。 1-4.试述反馈控制系统的基本组成。 反馈控制系统一般由以下的全部或部分组成(如图示): 1.给定元件:主要用于产生给定信号或输入信号 ones表示1矩阵 zeros表示0矩阵 ones(4)表示4x4的1矩阵 zeros(4)表示4x4的0矩阵 zeros(4,5)表示4x5的矩阵 eye(10,10)表示10x10的单位矩阵 rand(4,5)表示4x5的伴随矩阵 det(a)表示计算a的行列式 inv(a)表示计算a的逆矩阵 Jordan(a)表示求a矩阵的约当标准块rank(a)表示求矩阵a的秩 [v,d]=eig(a)对角矩阵 b=a’表示求a矩阵的转置矩阵 sqrt表示求平方根 exp表示自然指数函数 log自然对数函数 abs绝对值 第一章 一、5(1) b=[97 67 34 10;-78 75 65 5;32 5 -23 -59]; >> c=[97 67;-78 75;32 5;0 -12]; >> d=[65 5;-23 -59;54 7]; >> e=b*c e = 5271 11574 -11336 664 1978 3112 (2)a=50:1:100 二、1 、x=-74; y=-27; z=(sin(x.^2+y.^2))/(sqrt(tan(abs(x+y)) )+pi) z = -0.0901 2、a=-3.0:0.1:3.0; >> b=exp(-0.3*a).*sin(a+0.3) 3、x=[2 4;-0.45 5]; y=log(x+sqrt(1+x.^2))/2 y = 0.7218 1.0474 -0.2180 1.1562 4、a*b表示a矩阵和b矩阵相乘 a.*b表示a矩阵和b矩阵单个元素相乘A(m,n)表示取a矩阵第m行,第n列 A(m,:)表示取a矩阵第m行的全部元素A(:,n)表示取a矩阵的第n列全部元素 A./B表示a矩阵除以b矩阵的对应元素, B.\A等价于A./B A.^B表示两个矩阵对应元素进行乘方运算 A.^2表示a中的每个元素的平方 A^2表示A*A 例:x=[1,2,3]; y=[4,5,6]; z=x.^y z= 1 3 2 729 指数可以是标量(如y=2).底数也可以是标量(如x=2) 5、a=1+2i; >> b=3+4i; >> c=exp((pi*i)/6) c = 0.8660 + 0.5000i d=c+a*b/(a+b) d = 1.6353 + 1.8462i 第二章 二、4、(1) y=0;k=0; >> while y<3 k=k+1; y=y+1/(2*k-1); end >> display([k-1,y-1/(2*k-1)]) ans = 第三章 习题及答案 传递函数描述其特性,现在用温度计测量盛在容器内的水温。发现需要时间才能指示出实际水温的98%的数值,试问该温度计指示出实际水温从10%变化到90%所需的时间是多少? 解: 41min, =0.25min T T = 1111()=1-e 0.1, =ln 0.9t h t t T -=-T 21T 22()=0.9=1-e ln 0.1t h t t T -=-, 210.9 ln 2.20.55min 0.1 r t t t T T =-=== 2.已知某系统的微分方程为)(3)(2)(3)(t f t f t y t y +'=+'+'',初始条件2)0( , 1)0(='=--y y ,试求: ⑴系统的零输入响应y x (t ); ⑵激励f (t ) (t )时,系统的零状态响应y f (t )和全响应y (t ); ⑶激励f (t ) e 3t (t )时,系统的零状态响应y f (t )和全响应y (t )。 解:(1) 算子方程为:)()3()()2)(1(t f p t y p p +=++ ) ()e 2 5e 223()()()( ) ()e 2 1e 223()()()( )()e e 2()(2 112233)( )2(; 0 ,e 3e 4)( 34 221e e )( 2x 2222x 212 121221x t t y t y t y t t t h t y t t h p p p p p p H t t y A A A A A A A A t y t t t t t t f f t t t t εεεε------------+=+=+-==-=?+-+= +++= -=??? ?-==????--=+=?+=∴* ) ()e 4e 5()()()( )()e e ()(e )()( )3(2x 23t t y t y t y t t t h t y t t t t t f f εεε------=+=-==* 3.已知某系统的微分方程为)(3)(')(2)(' 3)(" t f t f t y t y t y +=++,当激励)(t f =)(e 4t t ε-时,系统 2014年分析化学课后作业参考答案 P25: 1.指出在下列情况下,各会引起哪种误差?如果是系统误差,应该采用什么方法减免? (1) 砝码被腐蚀; (2) 天平的两臂不等长; (3) 容量瓶和移液管不配套; (4) 试剂中含有微量的被测组分; (5) 天平的零点有微小变动; (6) 读取滴定体积时最后一位数字估计不准; (7) 滴定时不慎从锥形瓶中溅出一滴溶液; (8) 标定HCl 溶液用的NaOH 标准溶液中吸收了CO 2。 答:(1)系统误差中的仪器误差。减免的方法:校准仪器或更换仪器。 (2)系统误差中的仪器误差。减免的方法:校准仪器或更换仪器。 (3)系统误差中的仪器误差。减免的方法:校准仪器或更换仪器。 (4)系统误差中的试剂误差。减免的方法:做空白实验。 (5)随机误差。减免的方法:多读几次取平均值。 (6)随机误差。减免的方法:多读几次取平均值。 (7)过失误差。 (8)系统误差中的试剂误差。减免的方法:做空白实验。 3.滴定管的读数误差为±0.02mL 。如果滴定中用去标准溶液的体积分别为2mL 和20mL 左右,读数的相对误差各是多少?从相对误差的大小说明了什么问题? 解:因滴定管的读数误差为mL 02.0±,故读数的绝对误差mL a 02.0±=E 根据%100?T E = E a r 可得 %1%100202.02±=?±= E mL mL mL r %1.0%1002002.020±=?±=E mL mL mL r 这说明,量取两溶液的绝对误差相等,但他们的相对误差并不相同。也就是说,当被测定的量较大时,测量的相对误差较小,测定的准确程度也就较高。 4.下列数据各包括了几位有效数字? (1)0.0330 (2) 10.030 (3) 0.01020 (4) 8.7×10-5 (5) pKa=4.74 (6) pH=10.00 答:(1)三位有效数字 (2)五位有效数字 (3)四位有效数字 (4) 两位有效数字 (5) 两位有效数字 (6)两位有效数字 9.标定浓度约为0.1mol ·L -1 的NaOH ,欲消耗NaOH 溶液20mL 左右,应称取基准物质H 2C 2O 4·2H 2O 多少克?其称量的相对误差能否达到0. 1%?若不能,可以用什么方法予以改善?若改用邻苯二甲酸氢钾为基准物,结果又如何? 解:根据方程2NaOH+H 2C 2O 4·H 2O==Na 2C 2O 4+3H 2O 可知, 需H 2C 2O 4·H 2O 的质量m 1为: 第一章 3 解:1)工作原理:电压u2反映大门的实际位置,电压u1由开(关)门开关的指令状态决定,两电压之差△u=u1-u2驱动伺服电动机,进而通过传动装置控制 大门的开启。当大门在打开位置,u2=u 上:如合上开门开关,u1=u 上 ,△u=0, 大门不动作;如合上关门开关,u1=u 下 ,△u<0,大门逐渐关闭,直至完全关闭, 使△u=0。当大门在关闭位置,u2=u 下:如合上开门开关,u1=u 上 ,△u>0,大 门执行开门指令,直至完全打开,使△u=0;如合上关门开关,u1=u 下 ,△u=0,大门不动作。 2)控制系统方框图 4 解:1)控制系统方框图 2)工作原理: a)水箱是控制对象,水箱的水位是被控量,水位的给定值h ’由浮球顶杆的长度给定,杠杆平衡时,进水阀位于某一开度,水位保持在给定值。当有扰动(水的使用流出量和给水压力的波动)时,水位发生降低(升高),浮球位置也随着降低(升高),通过杠杆机构是进水阀的开度增大(减小),进入水箱的水流量增加(减小),水位升高(降低),浮球也随之升高(降低),进水阀开度增大(减小)量减小,直至达到新的水位平衡。此为连续控制系统。 b) 水箱是控制对象,水箱的水位是被控量,水位的给定值h ’由浮球拉杆的长度给定。杠杆平衡时,进水阀位于某一开度,水位保持在给定值。当有扰动(水的使用流出量和给水压力的波动)时,水位发生降低(升高),浮球位置也随着降低(升高),到一定程度后,在浮球拉杆的带动下,电磁阀开关被闭合(断开),进水阀门完全打开(关闭),开始进水(断水),水位升高(降低),浮球也随之升高(降低),直至达到给定的水位高度。随后水位进一步发生升高(降低),到一定程度后,电磁阀又发生一次打开(闭合)。此系统是离散控制系统。 2-1解: (c )确定输入输出变量(u1,u2) 22111R i R i u += 222R i u = ?-= -dt i i C u u )(1 1221 得到:11 21221222 )1(u R R dt du CR u R R dt du CR +=++ 一阶微分方程 (e )确定输入输出变量(u1,u2) ?++=i d t C iR iR u 1 211 R u u i 2 1-= 第一章质点运动学 1、(习题1.1):一质点在xOy 平面内运动,运动函数为2 x =2t,y =4t 8-。(1)求质点的轨道方程;(2)求t =1 s t =2 s 和时质点的位置、速度和加速度。 解:(1)由x=2t 得, y=4t 2-8 可得: y=x 2 -8 即轨道曲线 (2)质点的位置 : 2 2(48)r ti t j =+- 由d /d v r t =则速度: 28v i tj =+ 由d /d a v t =则加速度: 8a j = 则当t=1s 时,有 24,28,8r i j v i j a j =-=+= 当t=2s 时,有 48,216,8r i j v i j a j =+=+= 2、(习题1.2): 质点沿x 在轴正向运动,加速度kv a -=,k 为常数.设从原点出发时速 度为0v ,求运动方程)(t x x =. 解: kv dt dv -= ??-=t v v kdt dv v 001 t k e v v -=0 t k e v dt dx -=0 dt e v dx t k t x -?? =0 00 )1(0 t k e k v x --= 3、一质点沿x 轴运动,其加速度为a = 4t (SI),已知t = 0时,质点位于x 0=10 m 处,初速度v 0 = 0.试求其位置和时间的关系式. 解: =a d v /d t 4=t d v 4=t d t ? ?=v v 0 d 4d t t t v 2=t 2 v d =x /d t 2=t 2 t t x t x x d 2d 0 20 ?? = x 2= t 3 /3+10 (SI) 4、一质量为m 的小球在高度h 处以初速度0v 水平抛出,求: (1)小球的运动方程; (2)小球在落地之前的轨迹方程; (3)落地前瞬时小球的 d d r t ,d d v t ,t v d d . 解:(1) t v x 0= 式(1) 2gt 21h y -= 式(2) 201 ()(h -)2 r t v t i gt j =+ (2)联立式(1)、式(2)得 2 2 v 2gx h y -= (3) 0d -gt d r v i j t = 而落地所用时间 g h 2t = 所以 0d -2g h d r v i j t = d d v g j t =- 2 202y 2x )gt (v v v v -+=+= 21 20 212202)2(2])([gh v gh g gt v t g dt dv +=+= 5-10 某线性调制系统的输出信噪比为20dB ,输出噪声功率为9 10W ,由发射机输出端到解调器输 入端之间总的传输损耗为100dB ,试求: (1)DSB/SC 时的发射机输出功率; (2)SSB/SC 时的发射机输出功率。 解:设发射机输出功率为S T ,解调器输入信号功率为Si,则传输损耗K= S T /Si=100(dB). (1)DSB/SC 的制度增益G=2,解调器输入信噪比 相干解调时:Ni=4No 因此,解调器输入端的信号功率: 发射机输出功率: (2)SSB/SC 制度增益G=1,则 解调器输入端的信号功率 发射机输出功率: 6-1设二进制符号序列为 1 1 0 0 1 0 0 0 1 1 1 0,试以矩形脉冲为例,分别画出相应的单极性码波形、双极性码波形、单极性归零码波形、双极性归零码波形、二进制差分码波形及八电平码波形。 解:各波形如下图所示: 6-8已知信息代码为1 0 1 0 0 0 0 0 1 1 0 0 0 0 1 1,求相应的AMI码及HDB3码,并分别画出它们的波形图。 解: 6-11设基带传输系统的发送滤波器、信道及接收滤波器组成总特性为H(ω),若要求以2/Ts 波特的速 率进行数据传输,试检验图P5-7各种H(ω)是否满足消除抽样点上码间干扰的条件? (a ) (c ) (d ) 解:无码间干扰的条件是: ??? ??? ?> ≤=???? ? ?+=∑s s i s s eq T T T T i H H π ωπ ωπωω02)( (a ) ??? ? ?? ?> =≤=s s T B T H π ωππ ωω021)( 则 s T B 21= ,无码间干扰传输的最大传码率为:s s B T T B R 212max <= = 故该H (ω)不满足消除抽样点上码间干扰的条件。 (b ) ??? ? ?? ?> =≤=s s T B T H π ωππ ωω0231)( 则 s T B 23= ,无码间干扰传输的最大传码率为:s s B T T B R 232max >= = 虽然传输速率小于奈奎斯特速率,但因为R Bmax 不是2/T s 的整数倍,所以仍然不能消除码间干扰。故该H (ω)不满足消除抽样点上码间干扰的条件。 (c ) 如下图所示,H (ω)的等效H eq (ω)为: 第二章 2.1求下列函数的拉氏变换 (1)s s s s F 2 32)(23++= (2)4310)(2+-=s s s F (3)1)(!)(+-= n a s n s F (4)36 )2(6 )(2++=s s F (5) 2222 2) ()(a s a s s F +-= (6))14(21)(2 s s s s F ++= (7)52 1 )(+-= s s F 2.2 (1)由终值定理:10)(lim )(lim )(0 ===∞→∞ →s t s sF t f f (2)1 10 10)1(10)(+-=+= s s s s s F 由拉斯反变换:t e s F L t f ---==1010)]([)(1 所以 10)(lim =∞ →t f t 2.3(1)0) 2()(lim )(lim )0(2 =+===∞ →→s s s sF t f f s t )0()0()()()](['2''0 ' 'f sf s F s dt e t f t f L st --==-+∞ ? )0()0()(lim )(lim '2''0f sf s F s dt e t f s st s --=+∞ →-+∞ +∞→? 1 )2()(lim )0(2 2 2 ' =+==+∞→s s s F s f s (2)2 ) 2(1 )(+= s s F , t te s F L t f 21)]([)(--==∴ ,0)0(2)(22' =-=--f te e t f t t 又,1 )0(' =∴f 2.4解:dt e t f e t f L s F st s --?-==202)(11 )]([)( ??------+-=2121021111dt e e dt e e st s st s 分析化学第五版习题答案详解(下) 第五章配位滴定法 思考题答案 1.EDTA与金属离子的配合物有哪些特点? 答:(1)EDTA与多数金属离子形成1?1配合物;(2)多数EDTA-金属离子配合物稳定性较强(可形成五个五原子环); (3)EDTA与金属配合物大多数带有电荷,水溶性好,反应速率快;(4)EDTA与无色金属离子形成的配合物仍为无色,与有色金属离子形成的配合物颜色加深。 2.配合物的稳定常数与条件稳定常数有何不同?为什么要引用条件稳定常数? 答:配合物的稳定常数只与温度有关,不受其它反应条件如介质浓度、溶液pH值等的影响;条件稳定常数是以各物质总浓度表示的稳定常数,受具体反应条件的影响,其大小反映了金属离子,配位体和产物等发生副反应因素对配合物实际稳定程度的影响。 3.在配位滴定中控制适当的酸度有什么重要意义?实际应用时应如何全面考虑选择滴定时的pH? 答:在配位滴定中控制适当的酸度可以有效消除干扰离子的影响,防止被测离子水解,提高滴定准确度。具体控制溶液pH值范围时主要考虑两点:(1)溶液酸度应足够强以消去干扰离子的影响,并能准确滴定的最低pH值;(2)pH值不能太大以防被滴定离子产生沉淀的最高pH值。 4.金属指示剂的作用原理如何?它应该具备那些条件? 答:金属指示剂是一类有机配位剂,能与金属形成有色配合物,当被EDTA等滴定剂置换出来时,颜色发生变化,指示终点。金属指示剂应具备如下条件:(1)在滴定的pH范围内,指示剂游离状态的颜色与配位状态的颜色有较明显的区别;(2)指示剂与金属离子配合物的稳定性适中,既要有一定的稳定性K’MIn>104,又要容易被滴定剂置换出来,要求K’MY/K’MIn ≥104(个别102);(3)指示剂与金属离子生成的配合物应易溶于水;(4)指示剂与金属离子的显色反应要灵敏、迅速,有良好的可逆性。 5.为什么使用金属指示剂时要限定适宜的pH?为什么同一种指示剂用于不同金属离子滴定时,适宜的pH条件不一定相同? 答:金属指示剂是一类有机弱酸碱,存在着酸效应,不同pH时指示剂颜色可能不同,K’MIn不同,所以需要控制一定的pH值范围。指示剂变色点的lgK’Min应大致等于pMep, 不同的金属离子由于其稳定常数不同,其pMep也不同。金属指示剂不象酸碱指示剂那样有一个确定的变色点。所以,同一种指示剂用于不同金属离子滴定时,适宜的pH条件不一定相同。 6.什么是金属指示剂的封闭和僵化?如何避免? 答:指示剂-金属离子配合物稳定常数比EDTA与金属离子稳定常数大,虽加入大量EDTA也不能置换,无法达到终点,称为指示剂的封闭,产生封闭的离子多为干扰离子。消除方法:可加入掩蔽剂来掩蔽能封闭指示剂的离子或更换指示剂。指示剂或指示剂-金属离子配合物溶解度较小, 使得指示剂与滴定剂的置换速率缓慢,使终点拖长,称为指示剂的僵化。消除方法:可加入适当有机溶剂或加热以增大溶解度。 离散数学习题答案 习题一及答案:(P14-15) 14、将下列命题符号化: (5)李辛与李末是兄弟 解:设p :李辛与李末是兄弟,则命题符号化的结果是p (6)王强与刘威都学过法语 解:设p :王强学过法语;q :刘威学过法语;则命题符号化的结果是p q ∧ (9)只有天下大雨,他才乘班车上班 解:设p :天下大雨;q :他乘班车上班;则命题符号化的结果是q p → ` (11)下雪路滑,他迟到了 解:设p :下雪;q :路滑;r :他迟到了;则命题符号化的结果是()p q r ∧→ 15、设p :2+3=5. q :大熊猫产在中国. r :太阳从西方升起. 求下列复合命题的真值: (4)()(())p q r p q r ∧∧???∨?→ 解:p=1,q=1,r=0, ()(110)1p q r ∧∧??∧∧??, (())((11)0)(00)1p q r ?∨?→??∨?→?→? * ()(())111p q r p q r ∴∧∧???∨?→??? 19、用真值表判断下列公式的类型: (2)()p p q →?→? 解:列出公式的真值表,如下所示: 20、求下列公式的成真赋值: (4)()p q q ?∨→ 解:因为该公式是一个蕴含式,所以首先分析它的成假赋值,成假赋值的条件是: ()10p q q ?∨??? ???0 0p q ????? 所以公式的成真赋值有:01,10,11。 【 习题二及答案:(P38) 5、求下列公式的主析取范式,并求成真赋值: (2)()()p q q r ?→∧∧ 解:原式()p q q r ?∨∧∧q r ?∧()p p q r ??∨∧∧ ()()p q r p q r ??∧∧∨∧∧37m m ?∨,此即公式的主析取范式, 所以成真赋值为011,111。 *6、求下列公式的主合取范式,并求成假赋值: | (2)()()p q p r ∧∨?∨ 解:原式()()p p r p q r ?∨?∨∧?∨∨()p q r ??∨∨4M ?,此即公式的主合取范式, 所以成假赋值为100。 7、求下列公式的主析取范式,再用主析取范式求主合取范式: (1)()p q r ∧∨ 解:原式()(()())p q r r p p q q r ?∧∧?∨∨?∨∧?∨∧ ()()()()()()p q r p q r p q r p q r p q r p q r ?∧∧?∨∧∧∨?∧?∧∨?∧∧∨∧?∧∨∧∧ ()()()()()p q r p q r p q r p q r p q r ??∧?∧∨?∧∧∨∧?∧∨∧∧?∨∧∧ 13567m m m m m ?∨∨∨∨,此即主析取范式。 作业 P81-3,1-4。1-3 1-4 (P72)2-1,2-2。 2-1-a 22,u u u u u u i c i c -==+ dt du dt du c RC RC R i u i 22-==dt du dt du i RC u RC =+22 2-1-b 221Kx B B dt dx dt dx =- dt dx dt dx B Kx B 122=+ 2-1-c 2u u u i c -= 2212()(1212R C C R i i u R u R u dt du dt du R c i i -+-=+= i dt du dt du u R C R R u R R C R R i 22121221)(2+=++ 2-1-d 22211121x K x K x K B B dt dx dt dx =-+- 1122112)(x K B x K K B dt dx dt dx +=++ 2-1-e 1211R u R u R i i -= ???-+-= +=dt u dt u u u dt i R i u C R i C R R R i R R R C R 21 1211 21211121 2 i dt du dt du u C R u C R R i +=++22212 )( ? (P72)2-1,2-2 2-1-f dt dy B y K X K y K x K x K x K =--=-2222222111, 12212 1)1(x x y K K K K -+= dt dx K BK dt dx K K B x K x K K x K 12122 1)1()(1122122-+=-+- 111212112)(x K BK x K K K B dt dx dt dx +=++ 2-2 2 222212 121212222311311)( ,)( )(dt x d dt dx dt dx dt dx dt x d dt dx dt dx dt dx m B x K B m B B x K t f =--- =-- --22322 32 2 221 )(x K B B m B dt dx dt x d dt dx +++= 3 132222 1211 3311) () (dt x d dt x d dt x d dt dx dt t df m B B B K =++-- 2 2222 223 233 3122 223 13 2322 22322 )(]) ([]) ([dt x d dt dx dt x d dt x d B B B dt dx dt x d B K dt t df B K B B m x K B B m ++++- +++-+2 22 32132 333214 24321)(dt x d B K m dt x d B B B m dt x d B m m + + = + 2 2 23 234 24] [) (12323121213212312121dt x d dt x d dt x d K m B B B B B B K m B m B m B m B m m m +++++++++dt t df dt dx B x K K B B K B B K )(32213213122 )]()([=+++++ ? (P72)2-3:-2)、-4)、-6);2-4:-2)。 2-3:-2) 21)2)(1(321)(++++++==s A s A s s s s G 1-1机械工程控制论的研究对象与任务是什么? 解机械工程控制论实质上是研究机械一r_程技术中广义系统的动力学问题。具体地讲,机械工程控制论是研究机械工程广义系统在一定的外界条件作用下,从系统的一定初始条件出发,所经历的由内部的固有特性所决定的整个动态历程;研究这一系统及其输入、输出二者之间的动态关系。 机械工程控制论的任务可以分为以下五个方面: (1)当已知系统和输人时,求出系统的输出(响应),即系统分析。 (2)当已知系统和系统的理想输出,设计输入,即最优控制。 (3)当已知输入和理想输出,设计系统,即最优设计。 (4)当系统的输人和输出己知,求系统的结构与参数,即系统辨识。 (5)输出已知,确定系统,以识别输入或输入中的有关信息,即滤波与预测。 1.2 什么是反馈?什么是外反馈和内反馈? 所谓反馈是指将系统的输出全部或部分地返送回系统的输入端,并与输人信号共同作用于系统的过程,称为反馈或信息反馈。 所谓外反馈是指人们利用反馈控制原理在机械系统或过程中加上一个人为的反馈,构成一个自动控制系统。 所谓内反馈是指许多机械系统或过程中存在的相互藕合作用,形成非人为的“内在”反馈,从而构成一个闭环系统。 1.3 反馈控制的概念是什么?为什么要进行反馈控制? 所谓反馈控制就是利用反馈信号对系统进行控制。 在实际中,控制系统可能会受到各种无法预计的干扰。为了提高控制系统的精度,增强系统抗干扰能力,人们必须利用反馈原理对系统进行控制,以实现控制系统的任务。 1.4闭环控制系统的基本工作原理是什么? 闭环控制系统的基本工作原理如下: (1)检测被控制量或输出量的实际值; (2)将实际值与给定值进行比较得出偏差值; (3)用偏差值产生控制调节作用去消除偏差。 这种基于反馈原理,通过检测偏差再纠正偏差的系统称为闭环控制系统。通常闭环控制系统至少具备测量、比较和执行三个基本功能。 1.5对控制系统的基本要求是什么? 对控制系统的基本要求是稳定性、准确性和快速性。 稳定性是保证控制系统正常工作的首要条件。稳定性就是指系统动态过程的振荡倾向及其恢复平衡状态的能力。 准确性是衡量控制系统性能的重要指标。准确性是指控制系统的控制精度,一般用稳态误差来衡量。 快速性是指当系统的输出量与输入量之间产生偏差时,系统消除这种偏差的快慢程度。 第一章习题 一、单项选择题 1.数据库(DB),数据库系统(DBS)和数据库管理系统(DBMS)之间的关系是(A)。 A. DBS包括DB和DBMS B. DBMS包括DB和DBS C. DB包括DBS和DBMS D. DBS就是DB,也就是DBMS 2. 下面列出的数据库管理技术发展的三个阶段中,没有专门的软件对数据进行管理的是(D)。 I.人工管理阶段 II.文件系统阶段 III.数据库阶段 A. I 和II B. 只有II C. II 和III D. 只有I 3. 下列四项中,不属于数据库系统特点的是(C)。 A. 数据共享 B. 数据完整性 C. 数据冗余度高 D. 数据独立性高 4. 数据库系统的数据独立性体现在(B)。 A.不会因为数据的变化而影响到应用程序 B.不会因为系统数据存储结构与数据逻辑结构的变化而影响应用程序 C.不会因为存储策略的变化而影响存储结构 D.不会因为某些存储结构的变化而影响其他的存储结构 5. 要保证数据库的数据独立性,需要修改的是(C)。 A. 模式与外模式 B. 模式与内模式 C. 三层之间的两种映射 D. 三层模式 6. 要保证数据库的逻辑数据独立性,需要修改的是(A)。 A. 模式与外模式的映射 B. 模式与内模式之间的映射 C. 模式 D. 三层模式 7. 用户或应用程序看到的那部分局部逻辑结构和特征的描述是(C),它是模式的逻辑子集。 A.模式 B. 物理模式 C. 子模式 D. 内模式 8. 下述(B)不是DBA数据库管理员的职责。 A.完整性约束说明 B. 定义数据库模式 C.数据库安全 D. 数据库管理系统设计 9. 常见的数据模型有三种,它们是(B) A 网状、关系和语义 B 层次、关系和网状 C 环状、层次和关系 D 字段名、字段类型和记录 10. 在E-R图中,用来表示属性的图形是(B) A 矩形 B 椭圆形 C 菱形 D 平行四边形 二、填空题 1. 描述数据库全体数据的全局逻辑结构和特性的是_____模式______。 2. ____数据的物理独立性__________是指数据库的物理(存储)结构改变时, 一、单项选择题(在每小题的四个被选答案中,选出一个正确的答案,并将其 答案按顺序写在答题纸上,每小题2分,共40分) 1. 闭环控制系统的特点是 A 不必利用输出的反馈信息 B 利用输入与输出之间的偏差对系统进行控制 C 不一定有反馈回路 D 任何时刻输入与输出之间偏差总是零,因此不是用偏差来控制的 2.线性系统与非线性系统的根本区别在于 A 线性系统有外加输入,非线性系统无外加输入 B 线性系统无外加输入,非线性系统有外加输入 C 线性系统满足迭加原理,非线性系统不满足迭加原理 D 线性系统不满足迭加原理,非线性系统满足迭加原理 3. 222 )]([b s b s t f L ++=,则)(t f A bt b bt cos sin + B bt bt b cos sin + C bt bt cos sin + D bt b bt b cos sin + 4.已知 ) (1)(a s s s F +=,且0>a ,则 )(∞f A 0 B a 21 C a 1 D 1 5.已知函数)(t f 如右图所示,则 )(s F A s s e s e s --+2211 B s s e s s 213212+-- C )22121(1332s s s s se e e se s ------+ D )221(1s s s e e s e s ----+ 6.某系统的传递函数为 ) 3)(10()10()(+++=s s s s G ,其零、极点是 A 零点 10-=s ,3-=s ;极点 10-=s B 零点 10=s ,3=s ;极点 10=s C 零点 10-=s ;极点 10-=s ,3-=s D 没有零点;极点 3=s 7.某典型环节的传递函数为Ts s G =)(,它是 A 一阶惯性环节 B 二阶惯性环节 C 一阶微分环节 D 二阶微分环节 8.系统的传递函数只与系统的○有关。 A 输入信号 B 输出信号 C 输入信号和输出信号 D 本身的结构与参数 9.系统的单位脉冲响应函数t t g 4sin 10)(=,则系统的单位阶跃响应函数为 A t 4cos 40 B 16402+s C )14(cos 5.2-t D 16 102+s 10.对于二阶欠阻尼系统来说,它的阻尼比和固有频率 A 前者影响调整时间,后者不影响 B 后者影响调整时间,前者不影响 C 两者都影响调整时间 D 两者都不影响调整时间 11.典型一阶惯性环节1 1+Ts 的时间常数可在单位阶跃输入的响应曲线上求得, 时间常数是 A 响应曲线上升到稳态值的95%所对应的时间 B 响应曲线上升到稳态值所用的时间 C 响应曲线在坐标原点的切线斜率 D 响应曲线在坐标原点的切线斜率的倒数 12.已知)()()(21s G s G s G =,且已分别测试得到: )(1ωj G 的幅频特性 )()(11ωωA j G =,相频)()(11ω?ω=∠j G )(2ωj G 的幅频特性 2)(2=ωj G ,相频ωω1.0)(2-=∠j G 则 A )(1.011)(2)(ωω?ωωj e A j G -?= 机械控制工程课后答案 1-1机械工程控制论的研究对象与任务是什么? 解机械工程控制论实质上是研究机械一r_程技术中广义系统的动力学问题。具体地讲,机械工程控制论是研究机械工程广义系统在一定的外界条件作用下,从系统的一定初始条件出发,所经历的由内部的固有特性所决定的整个动态历程;研究这一系统及其输入、输出二者之间的动态关系。 机械工程控制论的任务可以分为以下五个方面: (1)当已知系统和输人时,求出系统的输出(响应),即系统分析。 (2)当已知系统和系统的理想输出,设计输入,即最优控制。 (3)当已知输入和理想输出,设计系统,即最优设计。 (4)当系统的输人和输出己知,求系统的结构与参数,即系统辨识。 (5)输出已知,确定系统,以识别输入或输入中的有关信息,即滤波与预测。 1.2 什么是反馈?什么是外反馈和内反馈? 所谓反馈是指将系统的输出全部或部分地返送回系统的输入端,并与输人信号共同作用于系统的过程,称为反馈或信息反馈。 所谓外反馈是指人们利用反馈控制原理在机械系统或过程中加上一个人为的反馈,构成一个自动控制系统。 所谓内反馈是指许多机械系统或过程中存在的相互藕合作用,形成非人为的“内在”反馈,从而构成一个闭环系统。 1.3 反馈控制的概念是什么?为什么要进行反馈控制? 所谓反馈控制就是利用反馈信号对系统进行控制。 在实际中,控制系统可能会受到各种无法预计的干扰。为了提高控制系统的精度,增强系统抗干扰能力,人们必须利用反馈原理对系统进行控制,以实现控制系统的任务。 1.4闭环控制系统的基本工作原理是什么? 闭环控制系统的基本工作原理如下: (1)检测被控制量或输出量的实际值; (2)将实际值与给定值进行比较得出偏差值; (3)用偏差值产生控制调节作用去消除偏差。 这种基于反馈原理,通过检测偏差再纠正偏差的系统称为闭环控制系统。通常闭环控制系统至少具备测量、比较和执行三个基本功能。 1.5对控制系统的基本要求是什么? 对控制系统的基本要求是稳定性、准确性和快速性。 稳定性是保证控制系统正常工作的首要条件。稳定性就是指系统动态过程的振荡倾向及其恢复平衡状态的能力。 准确性是衡量控制系统性能的重要指标。准确性是指控制系统的控制精度,一般用稳态误差来衡量。 快速性是指当系统的输出量与输入量之间产生偏差时,系统消除这种偏差的快慢程度。 2-1 dt d t u RC dt d dt d t u RC dt d t u dt t u C t u R t t u idt C t u i a i i i i )t (u )(1 )t (u )t (u )(1 )t (u ) (R ) (1)(i )(u )(1 )(.000 00000=++=+=∴=+=??同时:由电压定律有:设回流电流为 2-1什么是线性系统?其最重要特性是什么? 答:如果系统的数学模型是线性的,这种系统就叫做线性系统。线性系统最重要的特性,是适用于叠加原理。叠加原理说明,两个不同的作用函数(输入),同时作用于系统所产生 的响应(输出),等于两个作用函数单独作用的响应之和因此,线性系统对几个输入 量同时作用而产生的响应,可以一个一个地处理,然后对它们的响应结果进行叠加。 2-2 分别求出图(题2-2)所示各系统的微分方程。 ) () (t f t y k m (a ) ) (t y ) (t f 2 1 k k m (b ) c c 1 2 m x x i o (c ) 1k 2 k o i x x c (d ) 1 k 2k x i x o c (e ) 解:)(a )()()(t f t ky t y m =+ )(b )()()()(21t f t y k k t y m =++ ? ???+=-02010))((x c x m c x x c i 2 12110)()()() (K K s K K c cs K s X s X d i ++= 02010)())((x K c x x K x x e i i =-+-? ? 2-3 求图(题2-3)所示的传递函数,并写出两系统的无阻尼固有频率n ω及阻尼比ξ的表达式。 x i x o c k m (a ) C u u o i L R (b ) 解:图)(a 有:m k s m c s m k s G ++= 2)( m k n =ω mk C 2=ξ 图)(b 有:??? ???? =++=??idt C V idt C R L V i i i 110 ∴ LC s L R s LC s G 11 )(2+ += LC n 1=ω L C R 2=ξ 2-4 求图(题2-4)所示机械系统的传递函数。图中M 为输入转矩,m C 为圆周阻尼,J 为转动惯量。(应注意消去θ θ ,及θ ) x m k R c M m ,C J 题2-4 解:由已知可知输入量M 与输出量θ之间的关系为: M k C J m =++θθθ 经拉氏变换后为:)()()(2 s M k s s C s Js m =++θθθ ∴ 2 2 2 222/11)() ()(n n n m m s J k s J C s J k s C Js s M s s G ωξωωθ++=++=++== 其中,J k n = ω Jk C m 2=ξ 2-5 已知滑阀节流口流量方程式为)/2(v ρωp x c Q =,式中,Q 为通过节流阀流口的流量;p 为节流阀流口的前后油压差;v x 为节流阀的位移量;c 为流量系数;ω为节流口 3.在大气压力为101.3kPa 的地区,一操作中的吸收塔内表压为130 kPa 。若在大气压力为75 kPa 的高原地区操作吸收塔,仍使该塔塔顶在相同的绝压下操作,则此时表压的读数应为多少? 解:KPa .1563753.231KPa 3.2311303.101=-=-==+=+=a a p p p p p p 绝表表绝 1-6 为测得某容器内的压力,采用如图所示的U 形压差计,指示液为水银。已知该液体密度 为900kg/m 3,h=0.8m,R=0.45m 。试计算容器中液面上方的表压。 解:kPa Pa gm ρgR ρp gh ρgh ρp 53529742.70632.600378 .081.990045.081.9106.13300==-=??-???=-==+ 1-10.硫酸流经由大小管组成的串联管路,其尺寸分别为φ76×4mm 和φ57×3.5mm 。已知 硫酸的密度为1831 kg/m 3,体积流量为9m 3/h,试分别计算硫酸在大管和小管中的(1)质量 流量;(2)平均流速;(3)质量流速。 解: (1) 大管: mm 476?φ h kg ρq m V s /1647918319=?=?= s m d q u V /69.0068.0785.03600/9785.02 21=?== s m kg u G ?=?==211/4.1263183169.0ρ (2) 小管: mm 5.357?φ 质量流量不变 h kg m s /164792= s m d q u V /27.105.0785.03600/9785.02 222=?== 或: s m d d u u /27.1)50 68(69.0)(222112=== s m kg u G ?=?=?=222/4.2325183127.1ρ 1-11. 如附图所示,用虹吸管从高位槽向反应器加料,高位槽与反应器均与大气相通,且高位槽中液面恒定。现要求料液以1m/s 的流速在管内流动,设料液在管内流动时的能量损失为20J/kg (不包括出口),试确定高位槽中的液面应比虹吸管的出口高出的距离。 解: 以高位槽液面为1-1’面,管出口内侧为2-2’面,在1-1’~ 2-2’间列柏努 力方程: f W u p g Z u p g Z ∑+++=++222221112 121ρρ《控制工程基础》习题答案(燕山大学,第二版)
matlab课后答案解析完整版
控制工程基础第三章参考答案
分析化学课后作业答案解析
《控制工程基础》王积伟_第二版_课后习题解答(完整)
大学物理课后习题答案详解
通信原理习题答案解析
控制工程基础课后答案
分析化学第五版习题答案详解下
离散数学习题的答案解析
控制工程基础答案
机械控制工程基础课后答案
数据库练习题与答案解析
机械控制工程基础试题及答案(汇编)
机械控制工程基础课后答案-董玉红、徐莉萍主编
机械控制工程基础课后答案(廉自生)
化工原理课后答案解析