可达矩阵的Warshall算法实现
最短路径的Dijkstra算法及Matlab程序
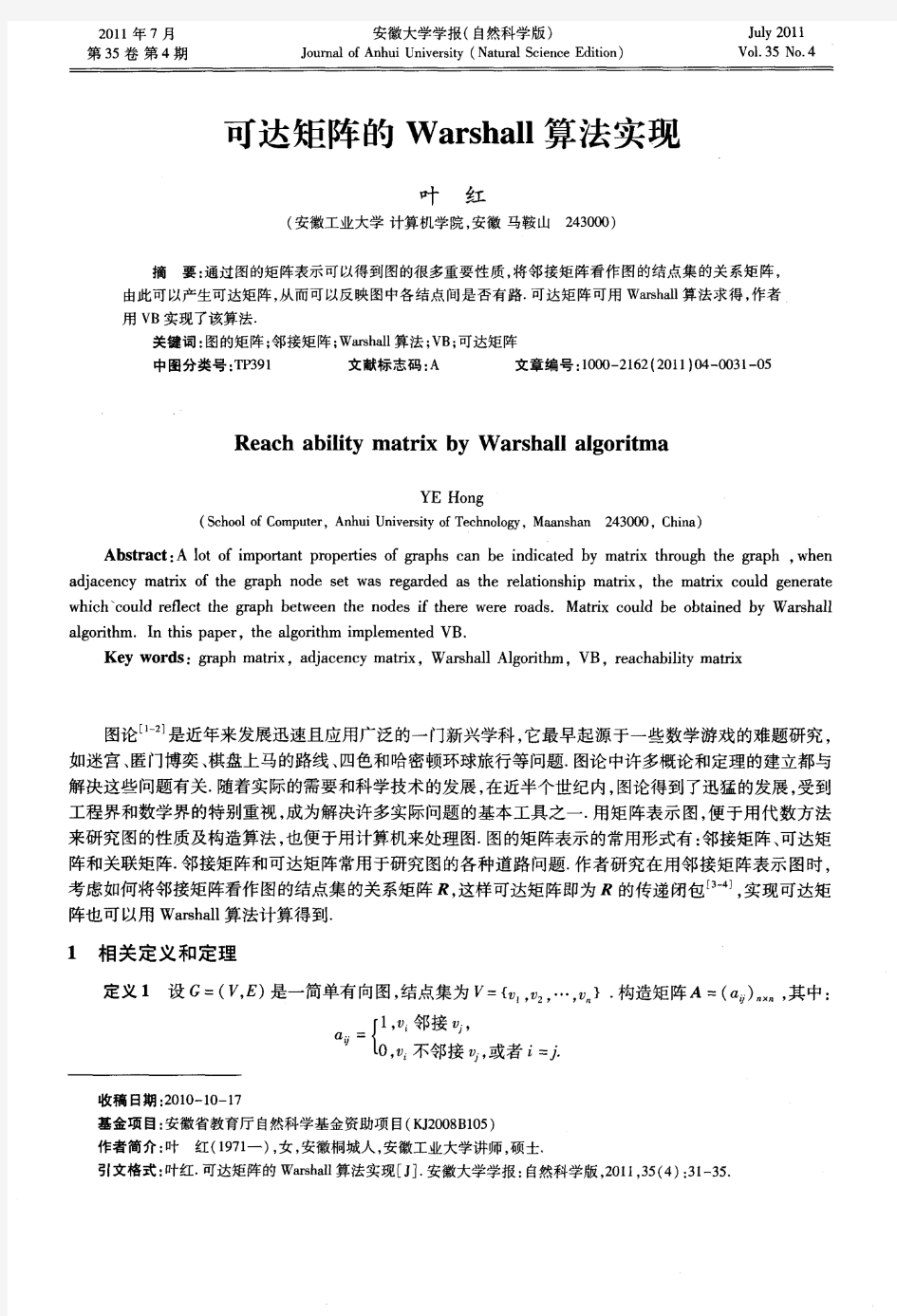
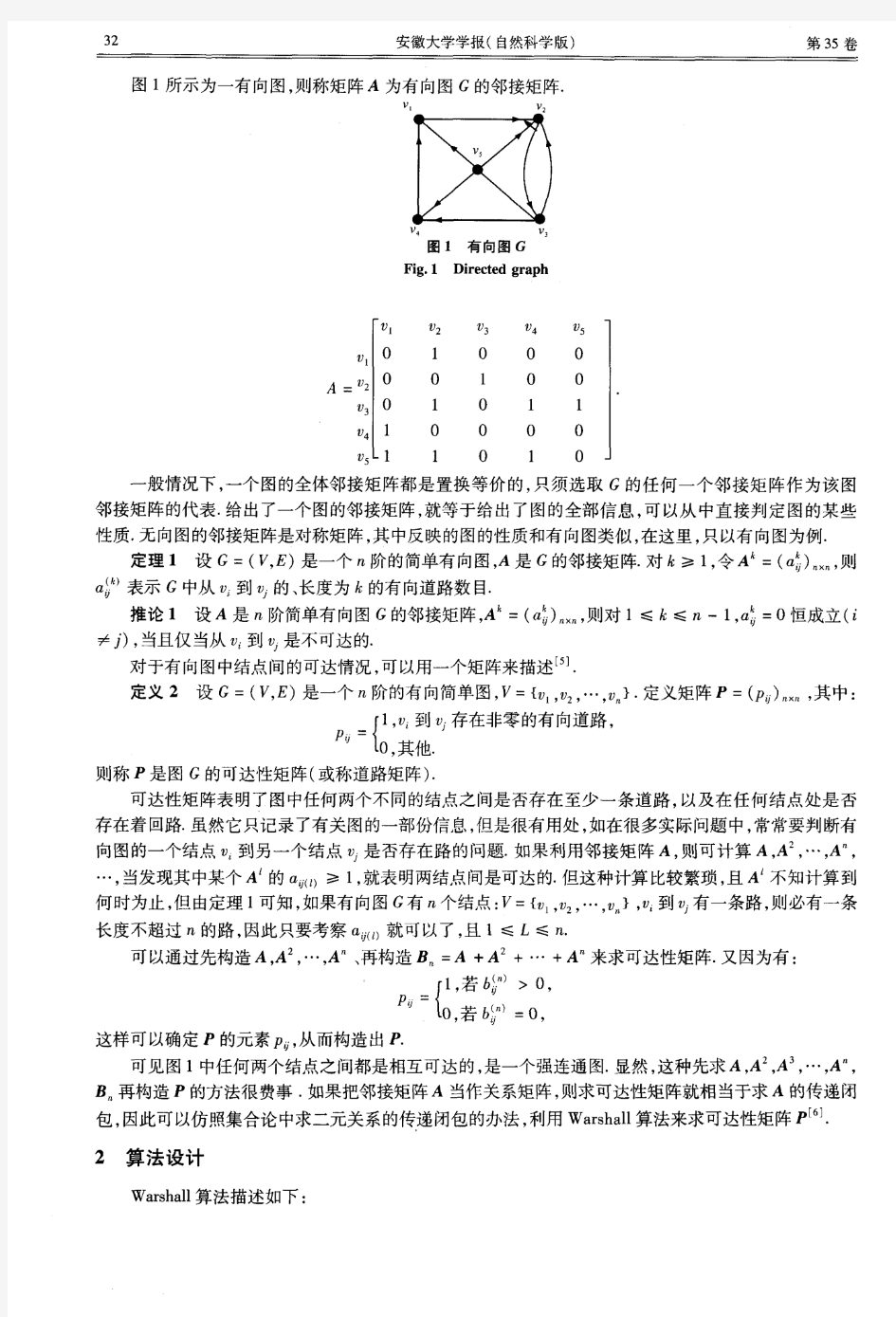
两个指定顶点之间的最短路径 问题如下:给出了一个连接若干个城镇的铁路网络,在这个网络的两个指定城镇间,找一条最短铁路线。 以各城镇为图G 的顶点,两城镇间的直通铁路为图G 相应两顶点间的边,得图G 。对G 的每一边e ,赋以一个实数)(e w —直通铁路的长度,称为e 的权,得到赋权图G 。G 的子图的权是指子图的各边的权和。问题就是求赋权图G 中指定的两个顶点00,v u 间的具最小权的轨。这条轨叫做00,v u 间的最短路,它的权叫做00,v u 间的距离,亦记作),(00v u d 。 求最短路已有成熟的算法:迪克斯特拉(Dijkstra )算法,其基本思想是按距0u 从近到远为顺序,依次求得0u 到G 的各顶点的最短路和距离,直至0v (或直至G 的所有顶点),算法结束。为避免重复并保留每一步的计算信息,采用了标号算法。下面是该算法。 (i) 令0)(0=u l ,对0u v ≠,令∞=)(v l ,}{00u S =,0=i 。 (ii) 对每个i S v ∈(i i S V S \=),用 )}()(),({min uv w u l v l i S u +∈ 代替)(v l 。计算)}({min v l i S v ∈,把达到这个最小值的一个顶点记为1+i u ,令}{11++=i i i u S S 。 (iii). 若1||-=V i ,停止;若1||- 经典题目 这里我们不介绍其它有关矩阵的知识,只介绍矩阵乘法和相关性质。 不要以为数学中的矩阵也是黑色屏幕上不断变化的绿色字符。在数学中,一个矩阵说穿了就是一个二维数组。一个n行m列的矩阵可以乘以一个m行p列的矩阵,得到的结果是一个n行p列的矩阵,其中的第i行第j列位置上的数等于前一个矩阵第i行上的m个数与后一个矩阵第j列上的m个数对应相乘后所有m个乘积的和。比如,下面的算式表示一个2行2列的矩阵乘以2行3列的矩阵,其结果是一个2行3列的矩阵。其中,结果的那个4等于2*2+0*1: 右面的算式则是一个1 x 3的矩阵乘以3 x 2的矩阵,得到一个1 x 2的矩阵: 矩阵乘法的两个重要性质:一,矩阵乘法不满足交换律;二,矩阵乘法满足结合律。为什么矩阵乘法不满足交换律呢?因为交换后两个矩阵有可能不能相乘。为什么它又满足结合律呢?假设你有三个矩阵A、B、C,那么(AB)C和 A(BC)的结果的第i行第j列上的数都等于所有A(ik)*B(kl)*C(lj)的和(枚举所有的k和l)。 经典题目1 给定n个点,m个操作,构造O(m+n)的算法输出m个操作后各点的位置。操作有平移、缩放、翻转和旋转这里的操作是对所有点同时进行的。其中翻转是以坐标轴为对称轴进行翻转(两种情况),旋转则以原点为中心。如果对每个点分别进行模拟,那么m个操作总共耗时O(mn)。利用矩阵乘法可以在O(m)的时间里把所有操作合并为一个矩阵,然后每个点与该矩阵相乘即可直接得出最终该点的位置,总共耗时O(m+n)。假设初始时某个点的坐标为x和y,下面5个矩阵可以分别对其进行平移、旋转、翻转和旋转操作。预先把所有m个操作所对应的矩阵全部乘起来,再乘以(x,y,1),即可一步得出最终点的位置。 经典题目2 给定矩阵A,请快速计算出A^n(n个A相乘)的结果,输出的每个数都mod p。 由于矩阵乘法具有结合律,因此A^4 = A * A * A * A = (A*A) * (A*A) = A^2 * A^2。我们可以得到这样的结论:当n 为偶数时,A^n = A^(n/2) * A^(n/2);当n为奇数时,A^n = A^(n/2) * A^(n/2) * A (其中n/2取整)。这就告诉我们,计算A^n也可以使用二分快速求幂的方法。例如,为了算出A^25的值,我们只需要递归地计算出A^12、A^6、A^3的值即可。根据这里的一些结果,我们可以在计算过程中不断取模,避免高精度运算。 经典题目3 POJ3233 (感谢rmq) 题目大意:给定矩阵A,求A + A^2 + A^3 + ... + A^k的结果(两个矩阵相加就是对应位置分别相加)。输出的数据mod m。k<=10^9。 这道题两次二分,相当经典。首先我们知道,A^i可以二分求出。然后我们需要对整个题目的数据规模k进行二分。比如,当k=6时,有: A + A^2 + A^3 + A^4 + A^5 + A^6 =(A + A^2 + A^3) + A^3*(A + A^2 + A^3) 应用这个式子后,规模k减小了一半。我们二分求出A^3后再递归地计算A + A^2 + A^3,即可得到原问题的答案。 5.3.4 附录E 最短路径算法——Dijkstra 算法 在路由选择算法中都要用到求最短路径算法。最出名的求最短路径算法有两个,即Bellman-Ford 算法和Dijkstra 算法。这两种算法的思路不同,但得出的结果是相同的。我们在下面只介绍Dijkstra 算法,它的已知条件是整个网络拓扑和各链路的长度。 应注意到,若将已知的各链路长度改为链路时延或费用,这就相当于求任意两结点之间具有最小时延或最小费用的路径。因此,求最短路径的算法具有普遍的应用价值。 令v 部分: 不直接相连与结点若结点 1 v ? ?∞在用计算机进行求解时,可以用一个比任何路径长度大得多的数值代替∞。对于上述例子, 可以使D (v ) = 99。 (2) 寻找一个不在N 中的结点w ,其D (w )值为最小。把w 加入到N 中。然后对所有不在N 中的结点v ,用[D (v ), D (w ) + l (w , v )]中的较小的值去更新原有的D (v )值,即: D (v )←Min[D (v ), D (w ) + l (w , v )] (E-1) (3) 重复步骤(2),直到所有的网络结点都在N 中为止。 表E-1是对图E-1的网络进行求解的详细步骤。可以看出,上述的步骤(2)共执行了5次。表中带圆圈的数字是在每一次执行步骤(2)时所寻找的具有最小值的D (w ) 值。当第5次执行步骤(2)并得出了结果后,所有网络结点都已包含在N 之中,整个算法即告结束。 表E-1 计算图E-1的网络的最短路径 现在我们对以上的最短路径树的找出过程进行一些解释。 因为选择了结点1为源结点,因此一开始在集合N中只有结点1。结点1只和结点2, 3和4直接相连,因此在初始化时,在D(2),D(3)和D(4)下面就填入结点1到这些结点相应的距离,而在D(5)和D(6)下面填入∞。 下面执行步骤1。在结点1以外的结点中,找出一个距结点1最近的结点w,这应当是w = 4,因为在D(2),D(3)和D(4)中,D(4) = 1,它的之值最小。于是将结点4加入到结点集合N中。这时,我们在步骤1这一行和D(4)这一列下面写入①,数字1表示结点4到结点1的距离,数字1的圆圈表示结点4在这个步骤加入到结点集合N中了。 接着就要对所有不在集合N中的结点(即结点2, 3, 5和6)逐个执行(E-1)式。 对于结点2,原来的D(2) = 2。现在D(w) + l(w, v) = D(4) + l(4, 2) = 1 + 2 = 3 > D(2)。因此结点2到结点1距离不变,仍为2。 对于结点3,原来的D(3) = 5。现在D(w) + l(w, v) = D(4) + l(4, 3) = 1 + 3 = 4 < D(3)。因此结点3到结点1的距离要更新,从5减小到4。 对于结点5,原来的D(5) = ∞。现在D(w) + l(w, v) = D(4) + l(4, 5) = 1 + 1 = 2 < D(5)。因此结点5到结点1的距离要更新,从∞减小到2。 对于结点6,现在到结点1的距离仍为∞。 步骤1的计算到此就结束了。 下面执行步骤2。在结点1和4以外的结点中,找出一个距结点1最近的结点w。现在有两个结点(结点2和5)到结点1的距离一样,都是2。我们选择结点5(当然也可以选择结点2,最后得出的结果还是一样的)。以后的详细步骤这里就省略了,读者可以自行完 1的路由表。此路由表指出对于发往某个目的结点的分组,从结点1发出后的下一跳结点(在算法中常称为“后继结点”)和距离。当然,像这样的路由表,在所有其他各结点中都有一个。但这就需要分别以这些结点为源结点,重新执行算法,然后才能找出以这个结点为根的最短路径树和相应的路由表。 二、利用零化多项式求解矩阵函数. 利用Jordan 标准型求解矩阵函数的方法比较复杂,它需要求J 和P 。下面我们介绍根据零化多项式求解矩阵函数的一种方法。 定律:n 阶方阵A 的最小多项式等于它的特征矩阵的第n 个(也就 是最后一个)不变因子n d ()λ。(可参见张远达《线性代数原理》P215) 设n 阶方阵A 的不变因子反向依次为n d (),λn 11d (),,d ()-λλ ,由它们给出的初等因子分别为 12r m m m 12r (),(),,()λ-λλ-λλ-λ ;s r 1m m r 1s (),,()++λ-λλ-λ ; ,s i i 1 m n ==∑ 由于1223n 1n d ()|d (),d ()|d (),,d ()|d ()-λλλλλλ ,故 1o r 1s ~+λλ必定出现在1r ~λλ中; 2o 若i j (i r)(j r)λ>=λ≤则i j m m ≤ 根据上述定理,A 的最小多项式 12r m m m 012r ()()()()?λ=λ-λλ-λλ-λ 即 12r m m m 12r (I A)(I A)(I A)O λ-λ-λ-= 令r i i 1m m ==∑,则可见m A 可以由02m 1A I,A,A ,,A -= 线性表示,从 而m i A (0)+λ>亦可由02m 1A I,A,A ,,A -= 线性表示。所以,矩阵函数f(A)若存在,也必定可由0m 1A ~A -线性表示。 因此,我们定义一个系数待定的(m -1)次多项式m 1 i i i 0g()c -=λ=λ∑,根据 以上论述,适当选择系数0m 1c ~c -,就可以使f (A )=g (A ) 龙源期刊网 https://www.360docs.net/doc/e312369797.html, 基于矩阵填充原理重建欧式距离矩阵 作者:韦仙 来源:《电子技术与软件工程》2016年第12期 欧式距离矩阵(EDM)在各领域的应用日益深入,而实际中多数EDM矩阵元素受噪声污染或者丢失,本文提出从有限的信息中重建EDM,实现矩阵填充的方法。利用基于凸优化的固定点迭代算法,采用Matlab语言编程,选取合适参数,经多次迭代使运行程序收敛,得出的重建矩阵效果显著。 【关键词】欧式距离矩阵矩阵填充奇异值分解低秩 近年来EDM重建问题得到许多学者的关注和研究,它主要应用于机器学习,多维尺度分析,核磁共振分子构象等方面。根据给定的几个成对节点间的距离如何有效地重建低维几何结构的节点?这就是欧氏距离矩阵填充所要解决的问题。本文利用低维空间节点距离矩阵的低秩性,将缺少的数据元素进行有效重建,得到准确、结构性良好的欧式距离矩阵(EDM)。 1 相关理论 1.1 欧式距离矩阵 2 数值结果 本文提出固定点迭代(FPC)算法重建目标矩阵DM,为解决欧式距离矩阵填充问题提供了一个有效方案。该算法主要用来实现秩最小化矩阵填充问题,通过选择适当参数,运行程序用Matlab语言编写,重建效果显著。 评估EDM重建准确率的一个重要参数为相对误差,而采用FPC算法实现重建的目标欧式距离矩阵,其相对误差量级均在10-4,已然是非常准确的重构结果。如图1、2所示,选取DM是一组秩为5,维数不同的欧式距离矩阵。从图1知,矩阵维数越大,最小采样率值越小,即仅需采集非常少量的数据便可准确的重建EDM;图2中随着程序运行时间随着维数的增大而增长。这说明采样FPC算法重建欧式距离矩阵,在采样率、运行时间及精准度方面均 具有优越性,尤其在重建低秩大型矩阵上采样数目极少且运行速率较快。 3 结论 本文利用FPC算法将程序收敛到秩最小化来解决部分欧式距离矩阵重建问题。但是由于 待重建的目标矩阵是未知的,那么要想得到准确的重建效果,就需要分析观测元素数量,质点坐标分布结构等问题。大多数EDM在许多方面均有广泛应用,并且矩阵元间有很大的相关性,则如何利用这一特性更准确地实现矩阵重建对距离估算问题的研究具有积极意义。 迪克斯特拉算法: 迪杰斯特拉算法(Dijkstra)是由荷兰计算机科学家狄克斯特拉于1959年提出的,因此又叫狄克斯特拉算法。是从一个顶点到其余各顶点的最短路径算法,解决的是有权图中最短路径问题。迪杰斯特拉算法主要特点是从起始点开始,采用贪心算法的策略,每次遍历到始点距离最近且未访问过的顶点的邻接节点,直到扩展到终点为止。 定义: Dijkstra算法一般的表述通常有两种方式,一种用永久和临时标号方式,一种是用OPEN,CLOSE表的方式,这里均采用永久和临时标号的方式。注意该算法要求图中不存在负权边。 算法思想: 按路径长度递增次序产生算法: 把顶点集合V分成两组: (1)S:已求出的顶点的集合(初始时只含有源点V0) (2)V-S=T:尚未确定的顶点集合 将T中顶点按递增的次序加入到S中,保证: (1)从源点V0到S中其他各顶点的长度都不大于从V0到T 中任何顶点的最短路径长度 (2)每个顶点对应一个距离值 S中顶点:从V0到此顶点的长度 T中顶点:从V0到此顶点的只包括S中顶点作中间顶点的最短路径长度 依据:可以证明V0到T中顶点Vk的,或是从V0到Vk的直接路径的权值;或是从V0经S中顶点到Vk的路径权值之和。 (反证法可证) 求最短路径步骤 算法步骤如下: G={V,E} 1.初始时令S={V0},T=V-S={其余顶点},T中顶点对应的距离值 若存在 5.3.4 附录E 最短路径算法——Dijkstra算法 在路由选择算法中都要用到求最短路径算法。最出名的求最短路径算法有两个,即Bellman-Ford算法和Dijkstra算法。这两种算法的思路不同,但得出的结果是相同的。我们在下面只介绍Dijkstra算法,它的已知条件是整个网络拓扑和各链路的长度。 应注意到,若将已知的各链路长度改为链路时延或费用,这就相当于求任意两结点之间具有最小时延或最小费用的路径。因此,求最短路径的算法具有普遍的应用价值。 下面以图E-1的网络为例来讨论这种算法,即寻找从源结点到网络中其他各结点的最短路径。为方便起见,设源结点为结点1。然后一步一步地寻找,每次找一个结点到源结点的最短路径,直到把所有 点1, j)为结点i (1) 初始化 令N表示网络结点的集合。先令N = {1}。对所有不在N中的结点v,写出 不直接相连与结点若结点直接相连 与结点若结点 1 1 ),1()(v v v l v D ? ? ?∞= 在用计算机进行求解时,可以用一个比任何路径长度大得多的数值代替∞。对于上述例子,可以使D (v ) = 99。 (2) 寻找一个不在N 中的结点w ,其D (w )值为最小。把w 加入到N 中。然后对所有不在N 中的结点v ,用[D (v ), D (w ) + l (w , v )]中的较小的值去更新原有的D (v )值,即: D (v )←Min[D (v ), D (w ) + l (w , v )] (E-1) (3) 重复步骤(2),直到所有的网络结点都在N 中为止。 表E-1是对图E-1的网络进行求解的详细步骤。可以看出,上述的步骤(2)共执行了5次。表中带圆圈的数字是在每一次执行步骤(2)时所寻找的具有最小值的D (w ) 值。当第5次执行步骤(2)并得出了结果后,所有网络结点都已包含在N 之中,整个算法即告结束。 表E-1 计算图E-1的网络的最短路径 几种矩阵完备算法的研究与实现 ——《矩阵分析》课程仿真作业报告* 刘鹏飞 电?系2016210858 摘要 矩阵完备是指从??部分已知的矩阵元素中恢复出整个矩阵。它在计算机视觉、推荐系统以及社交?络等??具有?泛的应?。矩阵恢复可以通过 求解?个与核范数有关的凸优化问题来实现。由此诞?了许多矩阵恢复的算 法,?如FPC算法等。FPC算法虽然实现简单,但其迭代速度较慢。在此基 础上,APG算法经过改进,能够提升迭代速度。但最?化核范数并不是求解 矩阵完备问题的唯??法,其中OptSpace算法构造了?个在流形上的优化问 题,相?于前两种算法能够以更?的精度恢复出原始矩阵。本?主要总结了 FPC、APG和OptSpace三种算法的步骤。特别地,对于OptSpace算法,本 ?提出了求解其中两个?优化问题的具体算法。最后,本?通过仿真实验和理 论分析?较了三种算法的特点,并给出了OptSpace算法的精度?于APG算 法的解释。 关键词:矩阵完备,核范数,FPC,APG,OptSpace 1介绍 1.1矩阵完备及其算法综述 矩阵完备是指从??部分已知的矩阵元素中恢复出整个矩阵。它在计算机视觉、推荐系统以及社交?络等??具有?泛的应?。矩阵完备可以描述成这样?个问题:对于?个m×n的矩阵M,其秩为r,我们只有对M中的部分采样,记*报告中所涉及到的仿真代码可在https://https://www.360docs.net/doc/e312369797.html,/s/1jHRcY8m下载 1 这些采样位置组成的集合为?,那么是否有可能从已知的部分元素中恢复出整个矩阵M。假如M为低秩矩阵,并且已知的元素?够多并且?够均匀地分布在整个矩阵中,那么我们可以通过解如下优化问题来恢复出原始矩阵[1]: min rank(W) s.t.W ij=M ij,(i,j)∈?(1-1)但是,问题(1-1)是?个NP难的?凸问题。在?定条件下,问题(1-1)可以转化成?个最?化核范数的问题。对于矩阵W m×n,W的核范数定义为其奇异值之和,即 ∥W∥?=min(m,n) ∑ k=1 σk(W)(1-2) 其中,σk(W)表?W第k?的奇异值。问题(1-1)可以转化成: min∥W∥? s.t.W ij=M ij,(i,j)∈?(1-3)对于(1-3)中带等式约束的问题,进?步地,可以将它凸松弛成?个?约束的 优化问题[2][3][4]: min 1 2 ∥A(W)?b∥22+μ∥W∥?(1-4) 其中,b是由矩阵中采样位置对应的元素组成的p×1维向量,p=|?|(|·|表?集合的势);A:R m×n?→R p是?个线性映射,A(W)=(W ij)|(i,j)∈?;μ是?个可以调整的参数。 对于(1-4)中的?约束问题,?献[2][3]分别提出了Fixed Point Continuation (FPC)和Singular Value Thresholding(SVT)的算法。本?认为,这两种算法虽然出发点不同,但其实质都是梯度下降法,没有本质的差别,在算法实现上也基本?样。因此,本?只研究其中?种,即FPC算法。FPC算法虽然实现简单,但其迭代速度慢,效率不?。在此基础上,?献[4]做出了改进,提出?种Accelerated Proximal Gradient Singular Value Thresholding(APG)算法(该算法是在SVT算法上改进的,本?认为FPC和SVT实质上是?种算法,故不做区别),能够?幅度地提?收敛速度。 前?提到的?种算法,都是从(1-1)中的最?化秩的问题出发,经过?步步凸松弛得到的。与上述基本思路不同,?献[5]提出了OptSpace算法,它实质上是通过解另?种优化问题来实现矩阵完备: min F(W)= ∑ (i;j)∈? ∥M ij?W ij∥2 s.t.rank(W)=r(1-5) 传递闭包Warshall方法计算可达矩阵简要介绍 ①在集合X上的二元关系R的传递闭包是包含R的X上的最小的传递关系。R的传递闭包在数字图像处理的图像和视觉基础、图的连通性描述等方面都是基本概念。一般用B表示定义在具有n个元素的集合X上关系R的n×n二值矩阵,则传递闭包的矩阵B+可如下计算: B+ = B + B2 + B3 + ……+ (B)n ②式中矩阵运算时所有乘法都用逻辑与代替,所有加法都用逻辑或代替。上式中的操作次序为B,B(B),B(BB),B(BBB),……,所以在运算的每一步我们只需简单地把现有结果乘以B,完成矩阵的n次乘法即可。 https://www.360docs.net/doc/e312369797.html, /ism/cal_warshall_get_r_mat_detail.php Warshall在1962年提出了一个求关系的传递闭包的有效算法。 其具体过程如下,设在n个元素的有限集上关系R的关系矩阵为M:(1)置新矩阵A=M; (2)置k=1; (3)对所有i如果A[i,k]=1,则对j=1..n执行: A[i,j]←A[i,j]∨A[k,j]; (4)k增1; (5)如果k≤n,则转到步骤(3),否则停止。 所得的矩阵A即为关系R的传递闭包t(R)的关系矩阵。 在《离散数学》中都提及了该算法。 Warshall算法映射到有向图中 设关系R的关系图为G,设图G的所有顶点为u1,u2,…,un,则t(R)的关系图可用该方法得到:若G中任意两顶点ui和uj之间有一条路径且没有ui到uj的弧,则在图G中增加一条从ui到uj的弧,将这样改造后的图记为G’,则G’即为t(R)的关系图。G’的邻接矩阵A应满足:若图G中存在从ui到uj路径,即ui与uj连通,则A[i,j]=1,否则 A[i,j]=0。 这样,求t(R)的问题就变为求图G中每一对顶点间是否连通的问题。 相乘矩阵,就为所有节点的关系图,也就是当前条件下的关系矩阵。 对于相乘矩阵,进行叠代,叠代的过程为,行取值,然后计算值中对应的每一行的值取并集,得到当前行的关系集合。 取完所有行,得到了一个新的转移矩阵再对转移矩阵进行进行求解。 最短路径之Dijkstra算法详细讲解 1最短路径算法 在日常生活中,我们如果需要常常往返A地区和B地区之间,我们最希望知道的可能是从A地区到B地区间的众多路径中,那一条路径的路途最短。最短路径问题是图论研究中的一个经典算法问题,旨在寻找图(由结点和路径组成的)中两结点之间的最短路径。算法具体的形式包括: (1)确定起点的最短路径问题:即已知起始结点,求最短路径的问题。 (2)确定终点的最短路径问题:与确定起点的问题相反,该问题是已知终结结点,求最短路径的问题。在无向图中该问题与确定起点的问题完全等同,在有向图中该问题等同于把所有路径方向反转的确定起点的问题。 (3)确定起点终点的最短路径问题:即已知起点和终点,求两结点之间的最短路径。 (4)全局最短路径问题:求图中所有的最短路径。 用于解决最短路径问题的算法被称做“最短路径算法”,有时被简称作“路径算法”。最常用的路径算法有:Dijkstra算法、A*算法、Bellman-Ford算法、Floyd-Warshall算法、Johnson算法。 本文主要研究Dijkstra算法的单源算法。 2Dijkstra算法 2.1Dijkstra算法 Dijkstra算法是典型最短路算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。 Dijkstra算法是很有代表性的最短路算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。 2.2Dijkstra算法思想 Dijkstra算法思想为:设G=(V,E)是一个带权有向图,把图中顶点集合V分成两组,第一组为已求出最短路径的顶点集合(用S表示,初始时S中只有一个源点,以后每求得一条最短路径,就将加入到集合S中,直到全部顶点都加入到S中,算法就结束了),第二组为其余未确定最短路径的顶点集合(用U 表示),按最短路径长度的递增次序依次把第二组的顶点加入S中。在加入的过程中,总保持从源点v到S中各顶点的最短路径长度不大于从源点v到U中任何顶点的最短路径长度。此外,每个顶点对应一个距离,S中的顶点的距离就是从v到此顶点的最短路径长度,U中的顶点的距离,是从v到此顶点只包括S 中的顶点为中间顶点的当前最短路径长度。 2.3Dijkstra算法具体步骤 目录 1.绪论 (1) 1.1研究背景与现状 (1) 1.2压缩感知 (2) 1.3矩阵重建 (4) 1.3.1低秩矩阵补全 (4) 1.3.2低秩矩阵恢复 (5) 1.3.3低秩表示 (6) 1.4低秩张量补全 (7) 1.5本文的主要内容和组织安排 (8) 2.基础理论知识 (10) 2.1向量与矩阵的基础知识 (10) 2.2张量基础知识 (13) 3.张量补全算法综述 (18) 3.1数学模型 (18) 3.2低秩张量补全算法 (19) 3.2.1简单低秩张量补全算法 (19) 3.2.2快速低秩张量补全算法 (21) 3.2.3高精度低秩张量补全算法 (21) 3.2.4核心张量核范数的张量补全算法 (23) 3.2.5因子矩阵核范数最小化张量补全算法 (26) 3.2.6矩阵分解的张量补全算法 (27) 3.3小结 (29) 4.改进的低秩张量补全算法 (30) 4.1改进的低秩张量补全模型 (31) 4.3实验分析 (33) 4.3.1人工数据集 (34) 4.3.2自然图像 (36) 4.3.3脑MRI图像和超光谱图像 (37) 4.3.4人脸图像 (40) 4.4小结 (43) I 万方数据 5.贝叶斯低秩张量CP分解模型 (44) 5.1基础知识 (44) 5.2低秩张量贝叶斯分解模型 (45) 5.2.1概率模型和先验概率 (45) 5.2.2贝叶斯学习模型理论 (47) 5.3预测分布 (51) 5.4实验分析 (52) 5.5小结 (54) 6.总结与展望 (55) 6.1总结 (55) 6.2展望 (56) 参考文献 附录在校发表的学术论文 致谢 II 万方数据 0 引言 F矩阵描述的是从不同拍摄点拍摄同一场景的图像时两图中点的对应关系,它还提供有关位置和摄像机参数的信息。 计算F矩阵最常用的是八点算法。要得到至少八个对应的图像点对。在这种算法下,我们可以很容易的使用线性方法来估计矩阵。但是八点算法对额外噪声十分敏感。为了克服这一缺点。哈特利(《计算机视觉中的多视图几何》的作者)引入一个坐标使图像标准化归一化。但是这种线性方法有一个缺点,那就是排除了秩等于2的约束。为了强加约束,这个F矩阵是利用奇异值分解重建获得的。这就造成了另一个问题:这个重建的过程会产生额外的噪声。 为了减少噪声,哈特利又应用非线性优化设置七个变化参量来满足秩等于2的约束。关于那七个变量参数有很多相关的方法,我提出用一个标量的双四元数来描述矩阵。这些参数代表对一个图像缩放和旋转。也就是说,我们对原图像进行了旋转。通过使用这些旋转,我们创造了一个新的图像矫正方法。 对于立体匹配来说,图像矫正是不可或缺的部分。它把任务由二维搜索变为一维搜索,减轻了任务量。流行的矫正方法大致可以分为两类:平面法和极性法。 平面矫正法是对图像进行透视变换,这是容易理解且易于实现。然而,这种方法不能处理那些极点位于图像内部的图像对。极点矫正法能够处理这种情况,但他们需要根据极点的位置进行一些繁琐的预处理。 F矩阵最麻烦的地方在于它的秩等于2,没有逆矩阵。为了计算F矩阵,人们提出了八点算法。这是一种易于实现的线性算法,但是对噪声太过敏感。人们又提出一种基于图像坐标归一化和非线性最优化的八点算法。还有很多其他成本函数最小化的方案。一些人采用另一种参数化的七自由度的方法来满足秩等于2的约束。对于线性求解,七点匹配是可以用于F矩阵的。 图像矫正技术与F矩阵关系密切,所以密集点的匹配是不可或缺的。通过矫正,两图片中所有的极线会水平对齐,将二维搜索变为一维搜索,使得任务大大减轻。本质上来讲,图像矫正是一种旋转。 另一方面,一些矫正方法已经适用于非标定图像对。非标定图像的矫正比标定图像更有用,因为准确的估计的相机参数是困难的,哪怕只有一个像素的错误就不利于准确匹配。 1 F矩阵的估计 1.1对极几何(两视几何) 对极几何描述的是场景中的三维点和一对图像点之间的关系。给定一个场景中三维点P被映射到I和I0两图像中,这三个点就构成一对极几何(图1)。点C和C0表示分别图像I和I0相机中心。三点P,C和C0组成平面,这就是所谓的极平面。每个图像平面与极平面相交,称为极线;一点投影在一个图像会有一个对应点位于其他图像平面的极线上(极线约束)。这个约束是指当我们有两个图像I和I0,和一点P在I上,如果我们要寻找在I0上对应点P0,仅沿极线搜索就可 以了。假设I平面上的点 ()T v u P, =对图像和I0平面上的点()T v u P' ' ', =都是是P的投影点,增加了齐次坐标的二维图像坐标,这样笛卡尔坐标下P和P旋转为射影坐标()T v u m1,, =和 ()T v u m1, ,' ' '=。采用这种画法,极线约束表现为以下形式: '= Fm m T(1) 最短路径—Dijkstra算法 Dijkstra算法 1.定义概览 Dijkstra(迪杰斯特拉)算法是典型的单源最短路径算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法是很有代表性的最短路径算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。注意该算法要求图中不存在负权边。 问题描述:在无向图G=(V,E) 中,假设每条边E[i] 的长度为w[i],找到由顶点V0 到其余各点的最短路径。(单源最短路径) 2.算法描述 1)算法思想:设G=(V,E)是一个带权有向图,把图中顶点集合V分成两组,第一组为已求出最短路径的顶点集合(用S表示,初始时S 中只有一个源点,以后每求得一条最短路径, 就将加入到集合S中,直到全部顶点都加入到S中,算法就结束了),第二组为其余未确定最短路径的顶点集合(用U表示),按最短路径长度的递增次序依次把第二组的顶点加入S中。在加入的过程中,总保持从源点v到S中各顶点的最短路径长度不大于从源点v到U中任何顶点的最短路径长度。此外,每个顶点对应一个距离,S中的顶点的距离就是从v到此顶点的最短路径长度,U中的顶点的距离,是从v到此顶点只包括S中的顶点为中间顶点的当前最短路径长度。 2)算法步骤: a.初始时,S只包含源点,即S={v},v的距离为0。U包含除v外的其他顶点,即:U={其余顶点},若v与U中顶点u有边, 则 Dijkstra 算法 #include "stdio.h" #include "stdlib.h" #define M 10000 int dist[M] = {0},fa[M] = {0},visit[M] = {0}; int g[M][M] = {0}; int n,start,end; int findmin(){ int i,flag; int min = 987654321; for( i = 1 ; i<= n ; i++ ) if( visit[i] == 0 && dist[i] < min && dist[i] != 0){ min = dist[i]; flag = i; } return flag; } int Dijkstra(){ int i,j,pos; for( i = 1 ; i <= n ; i++ ){ dist[i] = g[start][i]; if( dist[i] == 123456789 ) fa[i] = i; else fa[i] = start; } visit[start] = 1; for( i = 1 ; i <= n ; i++ ){ pos = 0; pos = findmin(); if(pos == 0) break; visit[pos] = 1; for( j = 1 ; j <= n ; j++ ) if( visit[j] == 0 && dist[j] > dist[pos] + g[pos][j] ){ dist[j] = dist[pos] + g[pos][j]; fa[j] = pos; } } } int main(){ int i,j; int p; scanf("%d%d%d",&n,&start,&end); for( i = 1 ; i <= n ; i++ ) 测试: t=(0:1000)/1000; y=exp(-t/0.1)+0.01*randn(size(t)); [f,A,a]=MatrixPencil(y,1,diff(t(1:2))) %矩阵束算法 %R----幅值 %a----衰减系数 %f----频率 %phy--相位 % function [A,a,f,phy]=MatrixPencil(data,M,T) % M-信号阶数 %T--采样间隔 function [f,A,a]=MatrixPencil(data,M,T) if size(data,1)>size(data,2) data=data'; end %构造Y1,Y2矩阵 N=length(data); L=ceil(N/3); Y=[]; %% 消噪 for j=1:N-L Y=[Y;data(j:j+L)]; %HANKEL矩阵 end [U,S,V]=svd(Y); %奇异值分解 g=diag(S); % g=sort(g,'descend'); % n=ceil(L/1.2); S1=S(:,1:M); %选取代表有用信号的奇异值矩阵 V1=V(1:end-1,1:M); %主要右奇异矩阵 V2=V(2:end,1:M); %主要右奇异矩阵 Y1=U*S1*V1'; Y2=U*S1*V2'; G=pinv(Y1)*Y2; g1=eig(G); g1=g1'; g1=g1(1:M); %% Z=[]; for j=1:N Z=[Z;g1.^(j-1)]; end R=inv(Z'*Z)*Z'*data'; R=R'; A=abs(R)'; %幅值 a=-1./(real(log(g1))/T)'; %衰减常数 f=imag(log(g1))'/T/2/pi; %频率 phy=-atan(imag(R)./real(R)); %相位 phy=phy'; t=(0:N-1)*T; y_new=zeros(size(t)); for j=1:N y_new(j)=sum(A.*exp(-t(j)./a).*cos(2*pi*f*t(j)+phy)); end plot(data) hold on plot(y_new,'r--') hold off D i j k s t r a算法详细讲解 This model paper was revised by the Standardization Office on December 10, 2020 最短路径之D i j k s t r a算法详细讲解 1最短路径算法 在日常生活中,我们如果需要常常往返A地区和B地区之间,我们最希望知道的可能是从A地区到B地区间的众多路径中,那一条路径的路途最短。最短路径问题是图论研究中的一个经典算法问题,旨在寻找图(由结点和路径组成的)中两结点之间的最短路径。算法具体的形式包括: (1)确定起点的最短路径问题:即已知起始结点,求最短路径的问题。 (2)确定终点的最短路径问题:与确定起点的问题相反,该问题是已知终结结点,求最短路径的问题。在无向图中该问题与确定起点的问题完全等同,在有向图中该问题等同于把所有路径方向反转的确定起点的问题。 (3)确定起点终点的最短路径问题:即已知起点和终点,求两结点之间的最短路径。 (4)全局最短路径问题:求图中所有的最短路径。 用于解决最短路径问题的算法被称做“最短路径算法”,有时被简称作“路径算法”。最常用的路径算法有:Dijkstra算法、A*算法、Bellman-Ford算法、Floyd-Warshall算法、Johnson算法。 本文主要研究Dijkstra算法的单源算法。 2 Dijkstra算法 2.1 Dijkstra算法 Dijkstra算法是典型最短路算法,用于计算一个节点到其他所有节点的最短路径。主要特点是以起始点为中心向外层层扩展,直到扩展到终点为止。Dijkstra算法能得出最短路径的最优解,但由于它遍历计算的节点很多,所以效率低。 Dijkstra算法是很有代表性的最短路算法,在很多专业课程中都作为基本内容有详细的介绍,如数据结构,图论,运筹学等等。 2.2 Dijkstra算法思想 Dijkstra算法思想为:设G=(V,E)是一个带权有向图,把图中顶点集合V分成两组,第一组为已求出最短路径的顶点集合(用S表示,初始时S中只有一个源点,以后每求得一条最短路径 , 就将加入到集合S中,直到全部顶点都加入到S中,算法就结束了),第二组为其余未确定最短路径的顶点集合(用U表示),按最短路径长度的递增次序依次把第二组的顶点加入S中。在加入的过程中,总保持从源点v到S中各顶点的最短路径长度不大于从源点v到U中任何顶点的最短路径长度。此外,每个顶点对应一个距离,S中的顶点的距离就是从v到此顶点的最短路径长度,U中的顶点的距离,是从v到此顶点只包括S中的顶点为中间顶点的当前最短路径长度。 2.3 Dijkstra算法具体步骤 Dijkstra算法原理详细讲解 如下图,设A为源点,求A到其他各顶点(B、C、D、E、F)的最短路径。线上所标注为相邻线段之间的距离,即权值。(注:此图为随意所画,其相邻顶点间的距离与图中的目视长度不能一一对等) 算法执行步骤如下表: Dijkstra算法的完整实现版本之算法的源代码 样例图: 输入格式: 输出格式: 输入时,将s,t,x,y,z五个点按照1,2,3,4,5起别名,输入格式按照下图例所示当提示Please enter the vertex where Dijkstra algorithm starts:时输入算法的起 始点 比如计算结果v1v4v2表示从点1到点2经过1,4,2为最短路径 Dijkstra算法的完整实现版本,算法的源代码 /* Dijkstra.c Copyright (c) 2002, 2006 by ctu_85 All Rights Reserved. */ #include "stdio.h" #include "malloc.h" #define maxium 32767 #define maxver 9 /*defines the max number of vertexs which the programm can handle*/ #define OK 1 struct Point { char vertex[3]; struct Link *work; struct Point *next; }; struct Link { char vertex[3]; int value; struct Link *next; }; struct Table /*the workbannch of the algorithm*/ { int cost; int Known; char vertex[3];矩阵算法经典题目
Dijkstra算法
矩阵函数的求法
基于矩阵填充原理重建欧式距离矩阵
dijkstra算法
Dijkstra最短路径算法
几种矩阵完备算法的研究与实现_矩阵分析仿真大作业
可达矩阵快速算法
DIJKSTRA算法详细讲解
改进的低秩张量补全算法及应用
基本矩阵的估计和图像矫正汇总
Dijkstra算法
Dijkstra算法
Dijkstra 算法(狄克斯特拉算法) 算法(狄克斯特拉算法)
目录
[隐藏]
? ? ? ? ? o ?
1 2 3 4 5
Dijkstra 算法概述 算法描述 虚拟码 时间复杂度 Dijkstra 算法案例分析 5.1 案例一:基于 Dijkstra 算法在物流配送中的应用[1] 6 参考文献
[编辑]
Dijkstra 算法概述
Dijkstra 算法 算法是由荷兰计算机科学家狄克斯特拉(Dijkstra)于 1959 年提出的,因此 又叫狄克斯特拉算法。 是从一个顶点到其余各顶点的最短路径算法, 解决的是有向图中最短 路径问题。 其基本原理是:每次新扩展一个距离最短的点,更新与其相邻的点的距离。当所有边权 都为正时, 由于不会存在一个距离更短的没扩展过的点, 所以这个点的距离永远不会再被改 变, 因而保证了算法的正确性。 不过根据这个原理, Dijkstra 求最短路的图不能有负权边, 用 因为扩展到负权边的时候会产生更短的距离, 有可能就破坏了已经更新的点距离不会改变的 性质。 举例来说,如果图中的顶点表示城市,而边上的权重表示著城市间开车行经的距离。 Dijkstra 算法可以用来找到两个城市之间的最短路径。 Dijkstra 算法的输入包含了一个有权重的有向图 G,以及 G 中的一个来源顶点 S。 我 们以 V 表示 G 中所有顶点的集合。 每一个图中的边,都是两个顶点所形成的有序元素对。 (u,v)表示从顶点 u 到 v 有路径相连。 我们以 E 所有边的集合,而边的权重则由权重函数 w: E → [0, ∞]定义。 因此,w(u,v)就是从顶点 u 到顶点 v 的非负花费值(cost)。 边的花费 可以想像成两个顶点之间的距离。 任两点间路径的花费值, 就是该路径上所有边的花费值总 和。已知有 V 中有顶点 s 及 t, Dijkstra 算法可以找到 s 到 t 的最低花费路径(i.e. 最短路径)。 这个算法也可以在一个图中,找到从一个顶点 s 到任何其他顶点的最短路径。Dijkstra算法C代码
矩阵束算法
Dijkstra算法详细讲解
Dijkstra算法原理详细讲解