机器人主要参数介绍(精)

机器人主要参数介绍
重复定位精度、可动范围、手部负载,这些术语究竟代表些什么?本篇将要介绍的是发那科机器人的主要参数。
手部负载条件
使用机器人时应保证机器人的负载条件在手部允许负载线图所示范围内。机型不同,法兰盘不同,其手部负载条件不同。以R-2000iB/165F,ISO法兰盘为例:
1运动轴数
发那科机器人有2轴、3轴、4轴、5轴和6轴机器人。
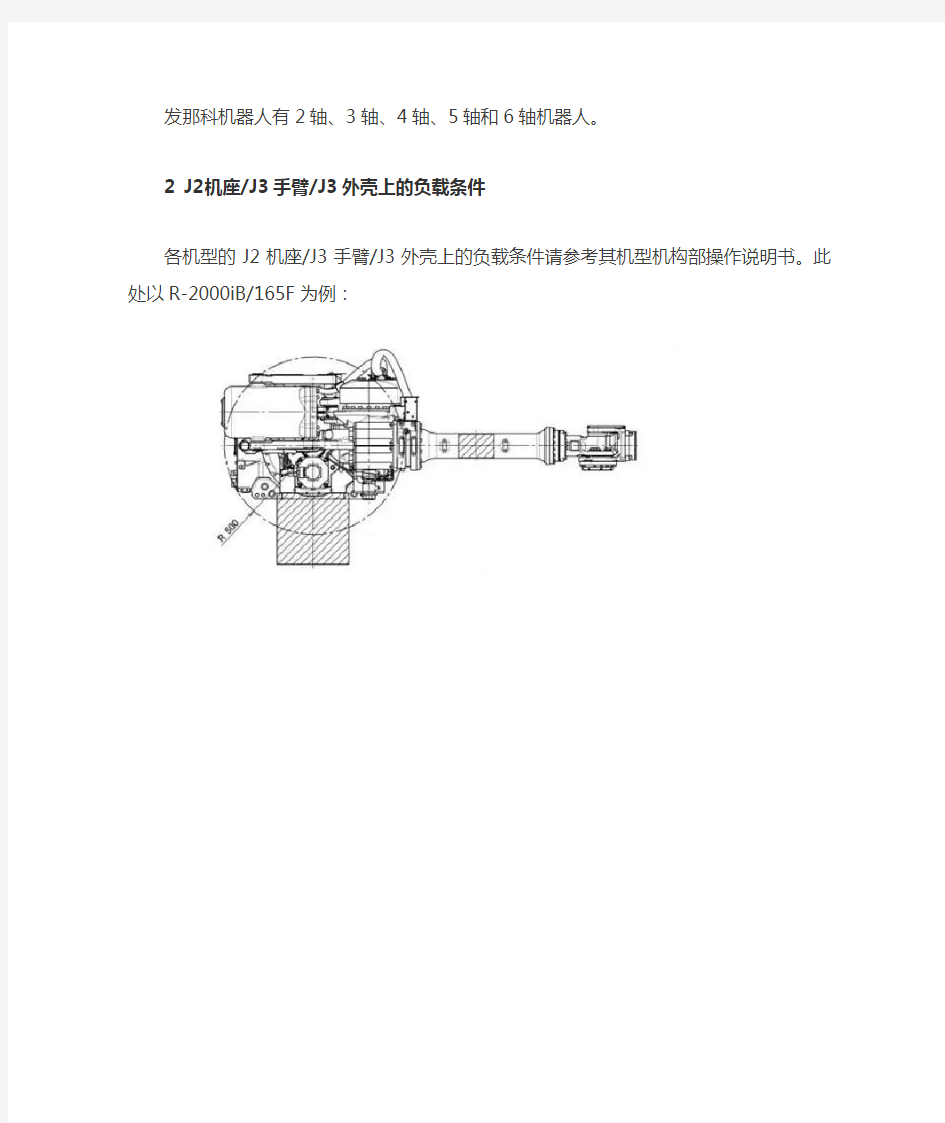
2 J2机座/J3手臂/J3外壳上的负载条件
各机型的J2机座/J3手臂/J3外壳上的负载条件请参考其机型机构部操作说明书。此处以R-2000iB/165F为例:
图二:J2机座/J3手臂部的负载条件(R-2000iB/165F)
3可动范围
各控制轴上,分别设有原点位置和可动范围。各轴都在可动范围的两端进行超程检测。为了进一步确保安全,还提供采用机械式制动器的可动范围限制和采用限位开关的可动范围限制。另外,请勿进行机械式制动器的改造。否则可能导致机器人不能正常停止。各机型的可动范围请参考其机型机构部操作说明书。此处以R-2000iB/165F的J1轴、J2轴和J3轴
为例:
4 安装方式
机器人的安装方式有:地面安装,顶吊安装,高台安装,倾斜角安装。具体机型的安装方式详见其机构部操作说明书。
此处列举部分机型的安装方式:
地面安装:R-2000iB/165F;顶吊安装:R-2000iB/150U;高台安装:R-2000iB/200R;倾斜角安装:LR Mate 200iD
5 重复定位精度
重复定位精度指的是机器人重复到达一个位置的精度。各机型的重复定位精度请参考其机型机构部操作说明书中的规格一览表。此处以LR Mate 200iD为例:LR Mate 200iD的重复定位精度为±0.02mm。
6 最大动作速度
最大动作速度指机器人运动时各轴所能达到的最高速度。各机型各轴的最大运动速度请参考其机型机构部操作说明书中的规格一览表。注:短距离移动时有可能达不到各轴的最高速度。此处以R-2000iB/165F为例:
智能机器人项目规划方案
智能机器人项目 规划方案 规划设计/投资方案/产业运营
摘要说明— 智能机器人的关键技术包括视觉、传感、人机交互和机电一体化等。 从应用角度分,智能机器人可以分为工业机器人和服务机器人。其中,工 业机器人一般包括搬运机器人、码垛机器人、喷涂机器人和协作机器人等。服务机器人可以分为行业应用机器人和个人/家用机器人。其中,行业应用 机器人包括智能客服、医疗机器人、物流机器人、引领和迎宾机器人等;个 人/家用机器人包括个人虚拟助理、家庭作业机器人(如扫地机器人)、儿童 教育机器人、老人看护机器人和情感陪伴机器人等。 该智能机器人项目计划总投资15586.12万元,其中:固定资产投资12184.34万元,占项目总投资的78.17%;流动资金3401.78万元,占项目 总投资的21.83%。 达产年营业收入31781.00万元,总成本费用24983.02万元,税金及 附加307.84万元,利润总额6797.98万元,利税总额8043.47万元,税后 净利润5098.48万元,达产年纳税总额2944.98万元;达产年投资利润率43.62%,投资利税率51.61%,投资回报率32.71%,全部投资回收期4.56年,提供就业职位556个。 报告内容:项目基本信息、建设背景及必要性分析、市场分析、调研、建设规划分析、项目选址研究、土建方案说明、工艺技术说明、环境保护、
项目安全管理、建设及运营风险分析、项目节能说明、进度说明、投资计划方案、项目经营效益、项目总结、建议等。 规划设计/投资分析/产业运营
智能机器人项目规划方案目录 第一章项目基本信息 第二章建设背景及必要性分析第三章建设规划分析 第四章项目选址研究 第五章土建方案说明 第六章工艺技术说明 第七章环境保护 第八章项目安全管理 第九章建设及运营风险分析第十章项目节能说明 第十一章进度说明 第十二章投资计划方案 第十三章项目经营效益 第十四章招标方案 第十五章项目总结、建议
乐高机器人
乐高机器人—齿轮篇 在机器人的设计中,机械结构是完善系统的一个重要因素。要认识各种各样的传动机构,了解其工作原理及其优缺点,什么时候用哪种传动系统最有效等,从而设计出出色的机器人系统。 2.1简介 齿轮是机器中很重要的部件,它几乎是机器的象征。探索齿轮的一种非常有用的特性:将一种力魔法般的转换成另外一种力。介绍一些新的概念——速度、力、扭矩、摩擦力;还有一些简单的机械理论基础。认识齿轮和简单杠杆之间的相似点。 2.2齿数的计算 一般用中至少需要两个齿轮,如图2.1所示,为两个普通的乐高齿轮:左边是8齿齿轮,右边是24齿齿轮。齿轮的最重要属性就是它的齿数。齿轮是根据齿数分类的:它的英文缩写就代表它的名字,例如24齿的齿轮可以表示为24t 。 图2.1 一个8齿和24齿的齿轮 例子中使用了8齿和24齿的两个齿轮,分别固定在一根轴上。两轴与一带孔梁相配合,两孔间距两个乐高单位(一个乐高单位就相当于相邻两孔间距),现在一手拿住梁,另一手轻轻地转动其中一根轴,注意到的第一个特性:当转动其中一根轴时,另一轴也同时转动,因此,齿轮的基本属性就是可以将运动从一根轴传到其它轴上。第二个特点是你不需要用很大的力去转动它们,因为齿轮间配合
相当紧凑,摩擦力很小,这也是乐高工艺系统大特性之一:部件之间配合精度高。第三个特点是两根轴反向转动:一个顺时针,一个逆时针。第四个特点:也是最重要的特性,就是两根轴的旋转速度不同。当转动8齿齿轮时,24齿齿轮转动得很慢;而24齿的齿轮转动时,8齿齿轮转动得很快。 2.3加速和减速传动 先转动大齿轮(24齿),它的每一个齿都与8齿的两个齿啮合的很好。当转动24齿,每一次在齿轮的接触面一个新齿取代前一个齿时,8齿也刚好转过一个齿,因此,大齿轮转过8个齿(24齿的齿轮)就可以让小齿轮转过一圈(360度)。当大齿轮再转过8个齿时,小齿轮又转了一圈。在你转动24齿齿轮的最后8个齿时,8齿齿轮转过第三圈。这也是两轴产生不同速度的原因:24齿齿轮转动一圈,8齿齿轮转动了三圈!我们用两个齿轮齿数之比来表示两者的关系:24比8。经过简化,得到3:1。从数字来看,24齿齿轮1转就相当与8齿齿轮的3转。 由此,我们得到一种加速的方法(从技术角度来将应称为角速度,而不是速度)。这时候你可能会想到在竞速小车上使用巨大的传动比。遗憾的是,在力学中有得必有失,获得了速度,同时就减少了扭矩,简单的说,就是在力量上的损失会转化为速度——速度越快,扭矩就越小。比率也相同:如果获得了三倍的角速度,你的扭矩会减小到原来的1/3。 齿轮有一个有趣的特性:扭矩和速度的转换是对称的,你可以将扭矩转换成速度,反之亦然。当系统增加速度而减小扭矩时,我们称为加速,反之我们称为减速。什么是扭矩? 当你用扳手转动螺钉上的螺母时,即产生扭矩。扳手动时,螺母产生抵阻力,你握手柄的地方离螺母越远,你需要施加的力就越小。实际上,力矩是两个参数的乘积:距离和力。增加其中一个量,就可以增加扭矩。力矩的度量单位就是力的单位和距离的单位,国际单位表示为牛顿米(Nm)或者是牛顿厘米(Ncm)。如果熟悉杠杆,你会认识到它们之间的相似性。对于杠杆,合力的大小依赖施力
智能机器人项目可研报告
智能机器人项目 可研报告 规划设计/投资分析/实施方案
智能机器人项目可研报告 智能机器人的关键技术包括视觉、传感、人机交互和机电一体化等。 从应用角度分,智能机器人可以分为工业机器人和服务机器人。其中,工 业机器人一般包括搬运机器人、码垛机器人、喷涂机器人和协作机器人等。服务机器人可以分为行业应用机器人和个人/家用机器人。其中,行业应用 机器人包括智能客服、医疗机器人、物流机器人、引领和迎宾机器人等;个 人/家用机器人包括个人虚拟助理、家庭作业机器人(如扫地机器人)、儿童 教育机器人、老人看护机器人和情感陪伴机器人等。 该智能机器人项目计划总投资3997.55万元,其中:固定资产投资3510.66万元,占项目总投资的87.82%;流动资金486.89万元,占项目总 投资的12.18%。 达产年营业收入4761.00万元,总成本费用3576.22万元,税金及附 加69.34万元,利润总额1184.78万元,利税总额1417.54万元,税后净 利润888.59万元,达产年纳税总额528.95万元;达产年投资利润率 29.64%,投资利税率35.46%,投资回报率22.23%,全部投资回收期6.00年,提供就业职位67个。 报告依据国家产业发展政策和有关部门的行业发展规划以及项目承办 单位的实际情况,按照项目的建设要求,对项目的实施在技术、经济、社
会和环境保护、安全生产等领域的科学性、合理性和可行性进行研究论证;本报告通过对项目进行技术化和经济化比较和分析,阐述投资项目的市场 必要性、技术可行性与经济合理性。 ......
智能机器人项目可研报告目录 第一章申报单位及项目概况 一、项目申报单位概况 二、项目概况 第二章发展规划、产业政策和行业准入分析 一、发展规划分析 二、产业政策分析 三、行业准入分析 第三章资源开发及综合利用分析 一、资源开发方案。 二、资源利用方案 三、资源节约措施 第四章节能方案分析 一、用能标准和节能规范。 二、能耗状况和能耗指标分析 三、节能措施和节能效果分析 第五章建设用地、征地拆迁及移民安置分析 一、项目选址及用地方案
人工智能设备项目策划方案
人工智能设备项目策划方案 规划设计/投资方案/产业运营
人工智能设备项目策划方案 到2019年3月19日,中央全面深化文员会审议通了《关于促进人工智能和实体经济深度融合的知道意见》。该文件提出要把握新一代人工智能发展的特点,结合不同行业、不同区域特点,探索创新成果应用转化的路径和方法,构建数据驱动、人机协同、跨界融合的智能经济形态。从而可以看出政府把人工智能上升到国家意志的决心,人工智能已成为引领科技发展的重要驱动力。 该人工智能设备项目计划总投资10176.78万元,其中:固定资产投资8385.06万元,占项目总投资的82.39%;流动资金1791.72万元,占项目总投资的17.61%。 达产年营业收入16335.00万元,总成本费用12313.37万元,税金及附加186.04万元,利润总额4021.63万元,利税总额4762.38万元,税后净利润3016.22万元,达产年纳税总额1746.16万元;达产年投资利润率39.52%,投资利税率46.80%,投资回报率29.64%,全部投资回收期4.87年,提供就业职位254个。 坚持“三同时”原则,项目承办单位承办的项目,认真贯彻执行国家建设项目有关消防、安全、卫生、劳动保护和环境保护管理规定、规范,
积极做到:同时设计、同时施工、同时投入运行,确保各种有害物达标排放,尽量减少环境污染,提高综合利用水平。 ......
人工智能设备项目策划方案目录 第一章申报单位及项目概况 一、项目申报单位概况 二、项目概况 第二章发展规划、产业政策和行业准入分析 一、发展规划分析 二、产业政策分析 三、行业准入分析 第三章资源开发及综合利用分析 一、资源开发方案。 二、资源利用方案 三、资源节约措施 第四章节能方案分析 一、用能标准和节能规范。 二、能耗状况和能耗指标分析 三、节能措施和节能效果分析 第五章建设用地、征地拆迁及移民安置分析 一、项目选址及用地方案
乐高机器人考试教案资料
乐高机器人考试
全国青少年机器人技术等级考试测试试卷(一级) 分数:100 题数:45 总体情况 姓名开始时间结束时间用时(分钟) 得分得分率是否通过 考试状态 JQR 2018-03-11 12:33:38 2018-03-11 12:33:44 0.08 *** *** *** 已提交 一、单选题(共30题,每题2分,共60分) 1. 如下图齿轮组所示,齿轮1的直径是20,转速为100rpm,齿轮2的直径是40,齿轮3的直径是10,当齿轮1为主动轮时,齿轮3的转速为 A. 50 B. 100 C. 200 D. 150 2.下列说法正确的是 A. 只要是利用杠杆原理的,都是省力杠杆。 B. 千斤顶利用了杠杆原理,为了省力。
C. 推动带有四个轮子的货车是利用了杠杆原理。 D. 生活中无费力杠杆。 3.下列人物形象中,哪一个是机器人? A. B.
C. D. 4.当阻力作用线到支点作用线的距离大于动力点到支点的距离时,杠杆 A. 省力 B. 费力 C. 既不省力也不费力 D. 以上答案都不对 5.如下图中,动滑轮有()个。
A. 1 B. 2 C. 3 D. 0 6.木工师傅使用斧头作为工具,是利用()能省力的原理。 A. 滑轮 B. 轮轴 C. 斜面 D. 杠杆 7.在日常生活中,用10N的拉力不能提起重15N的物体的简单机械是 A. 一个定滑轮 B. 一个动滑轮 C. 杠杆 D. 斜面 8.机器人的英文单词是 A. botre B. boret C. robot D. rebot 9.关于轮轴的描述,下列说法正确的是
智能机器人项目立项申请
智能机器人项目立项申请 一、项目提出的理由 当前我国经济形势是长期和短期、内部和外部等因素共同作用的结果。我国经济正在由高速增长阶段转向高质量发展阶段,外部环境也发生深刻变化,一些政策效应有待进一步释放。面对经济运行存在的突出矛盾和问题,要坚持稳中求进工作总基调,坚持新发展理念,坚持以供给侧结构性改革为主线,加大改革开放力度,抓住主要矛盾,有针对性地加以解决。要切实办好自己的事情,坚定不移推动高质量发展,实施好积极的财政政策和稳健的货币政策,做好稳就业、稳金融、稳外贸、稳外资、稳投资、稳预期工作,有效应对外部经济环境变化,确保经济平稳运行。要坚持“两个毫不动摇”,促进多种所有制经济共同发展,研究解决民营企业、中小企业发展中遇到的困难。 二、项目选址 项目选址位于xxx高新区。地区生产总值3865.94亿元,比上年增长
8.54%。其中,第一产业增加值309.28亿元,增长9.01%;第二产业增加值2396.88亿元,增长5.36%第三产业增加值1159.78亿元,增长5.02%。 一般公共预算收入291.24亿元,同比增长8.40%,一般公共预算支出524.85亿元,同比增长8.07%。国税收入348.17亿元,同比增长10.64%;地税收入亿元31.10,同比增长10.15%。 居民消费价格上涨1.14%。其中,食品烟酒上涨1.18%,衣着上涨0.81%,居住上涨0.76%,生活用品及服务上涨1.16%,教育文化和娱乐上涨0.68%,医疗保健上涨0.73%,其他用品和服务上涨1.17%,交通和通信上涨1.09%。 全部工业完成增加值1594.87亿元。规模以上工业企业实现增加值1225.78亿元,比上年增长7.42%。 场址应靠近交通运输主干道,具备便利的交通条件,有利于原料和产成品的运输,同时,通讯便捷有利于及时反馈产品市场信息。 三、建设背景及必要性 1、《xxx国民经济和社会发展第十三个五年规划纲要》指出:加快工业聚集区建设,坚持走信息化与工业化融合发展的新型工业化道路,引导优势特色产业膨胀升级,扶持龙头企业做大做强,逐步培育形成引领当地经济发展的工业主导产业;本期工程项目的建设符合《xxx国民经济和社会发展第十三个五年规划纲要》。 2、相对于中国宏观经济发展,中国制造2025是一个偏向技术性的制
工业机器人技术
机器人技术 机器人在人类生产作业中的重要应用 学院:机械工程学院 专业: 液压元件与控制 班级: 08级5班 学号: 080803110250 姓名:卢红兵
一、研究意义与必要性 国际标准化组织(ISO)曾于1987年对工业机器人进行定义:“工业机器人是一种具有自动控制的操作和移动功能,能完成各种作业的可编程操作机。”该定义与美国机器人学会(RIA)和日本工业标准(JIS)对工业机器人的定义相近。工业机器人主要用于制造业中,随着机器人技术的发展,它目前已广泛地用于汽车、机械制造、电子工业及塑料制品等生产领域,进而扩展到核能、采矿、冶金、石油、化学、航空、航天、船舶、建筑、纺织、制衣、医药、生化、食品等工业领域,机器人将成为人类社会生产活动的“主劳力”,人类将从繁重的、重复单调的、有害健康和危险的生产劳动中解放出来,从而有更多的时间去学习、研究和创造。 工业机器人是一种自动的、位置可控的、具有编程功能的多功能操作机,多以机械臂的形式出现,这种操作机具有几个轴,能够借助可编程操作来处理各种材料、零件、工具和专用装置以执行各种任务。在日本,单轴机器人同样被列入工业机器人的范畴。 工业机器人由操作机(机械本体)、控制器、伺服驱动系统和检测传感装置构成,是一种仿人操作、自动控制、可重复编程、能在三维空间完成各种作业的机电一体化自动化生产设备。特别适合于多品种、变批量的柔性生产。它对稳定、提高产品质量,提高生产效率,改善劳动条件和产品的快速更新换代起着十分重要的作用。机器人并不是在简单意义上代替人工的劳动,而是综合了人的特长和机器特长的一种拟人的电子机械装置,既有人对环境状态的快速反应和分析判断能力,又有机器可长时间持续工作、精确度高、抗恶劣环境的能力,从某种意义上说它也是机器的进化过程产物,它是工业以及非产业界的重要生产和服务性设备,也是先进制造技术领域不可缺少的自动化设备。 工业机器人是机器人的一个重要分支,它的特点是可通过编程完成各种预期的作业任务,在构造和性能上兼有人和机器人各自的优点,尤其是体现了人的智能和适应性,机器作业的准确性和在各种环境中完成作业的能力。因而在国民经济各个领域中具有广阔的应用前景 机器人技术是综合了机械学、计算机、控制论、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当代研究十分活跃,应用日益广泛的领域,机器人的应用情况,是一个国家工业自动化水平的重要标志。 二、国内外研究现状及分析 日本是当今的工业机器人王国,既是工业机器人的最大制造国也是最大消费国。但实际上工业机器人的诞生地是美国。美国人英格伯格和德奥尔制造出了世界上第一台工业机器人,他们发现可以让机器人去代替工人一些简单重复的劳动,而且不需要报酬和休息,任劳任怨。接着他们两人合办了世界上第一家机器人制造工厂,生产unimate工业机器人。如图1所示。
智能机器人项目可行性研究报告模板范文(立项备案项目申请)
智能机器人项目 可行性研究报告 规划设计 / 投资分析
智能机器人项目可行性研究报告说明 该智能机器人项目计划总投资16599.99万元,其中:固定资产投资12680.16万元,占项目总投资的76.39%;流动资金3919.83万元,占项目 总投资的23.61%。 达产年营业收入35181.00万元,总成本费用27779.13万元,税金及 附加326.06万元,利润总额7401.87万元,利税总额8748.88万元,税后 净利润5551.40万元,达产年纳税总额3197.48万元;达产年投资利润率44.59%,投资利税率52.70%,投资回报率33.44%,全部投资回收期4.49年,提供就业职位576个。 报告根据我国相关行业市场需求的变化趋势,分析投资项目项目产品 的发展前景,论证项目产品的国内外市场需求并确定项目的目标市场、价 格定位,以此分析市场风险,确定风险防范措施等。 ...... 主要内容:基本情况、项目建设必要性分析、产业分析预测、产品规 划及建设规模、项目选址方案、土建工程说明、工艺概述、环境保护概况、项目职业安全管理规划、建设及运营风险分析、节能情况分析、进度计划、投资分析、经济收益分析、项目评价等。
第一章基本情况 一、项目概况 (一)项目名称 智能机器人项目 (二)项目选址 xx经济新区 (三)项目用地规模 项目总用地面积50885.43平方米(折合约76.29亩)。 (四)项目用地控制指标 该工程规划建筑系数57.44%,建筑容积率1.54,建设区域绿化覆盖率6.93%,固定资产投资强度166.21万元/亩。 (五)土建工程指标 项目净用地面积50885.43平方米,建筑物基底占地面积29228.59平方米,总建筑面积78363.56平方米,其中:规划建设主体工程62365.61平方米,项目规划绿化面积5430.89平方米。 (六)设备选型方案 项目计划购置设备共计155台(套),设备购置费5415.20万元。 (七)节能分析 1、项目年用电量965570.32千瓦时,折合118.67吨标准煤。
儿童智能机器人项目计划方案
儿童智能机器人项目计划方案 一、项目提出的理由 今年改革开放40周年,也是决胜全面建成小康社会、实施“十三五”规划承上启下的关键一年。做好全年经济工作,意义深远、责任重大。2018年前三季度国民经济运行数据已陆续发布,初步核算,前三季度国内生产总值650899亿元,按可比价格计算,同比增长6.7%。分季度看,一季度同比增长6.8%,二季度增长6.7%,三季度增长6.5%。分产业看,第一产业增加值42173亿元,同比增长3.4%;第二产业增加值262953亿元,增长5.8%;第三产业增加值345773亿元,增长7.7%。总的来看,前三季度国民经济运行在合理区间,保持总体平稳、稳中有进发展态势,同时也要看到,经济运行稳中有变、稳中有缓,下行压力加大。 二、项目选址 项目选址位于xxx产业集聚区。地区生产总值3514.11亿元,比上年增长11.76%。其中,第一产业增加值281.13亿元,增长9.64%;第二产业增
加值2178.75亿元,增长10.95%第三产业增加值1054.23亿元,增长11.63%。 一般公共预算收入281.72亿元,同比增长11.24%,一般公共预算支出475.77亿元,同比增长7.24%。国税收入307.80亿元,同比增长10.85%;地税收入亿元56.43,同比增长8.14%。 居民消费价格上涨1.05%。其中,食品烟酒上涨1.11%,衣着上涨0.78%,居住上涨0.85%,生活用品及服务上涨0.63%,教育文化和娱乐上涨0.77%,医疗保健上涨0.66%,其他用品和服务上涨0.79%,交通和通信上涨0.80%。 全部工业完成增加值1760.10亿元。规模以上工业企业实现增加值1254.04亿元,比上年增长8.20%。 场址选择应提供足够的场地用以满足项目产品生产工艺流程及辅助生产设施的建设需要;场址应具备良好的生产基础条件而且生产要素供应充裕,确保能源供应有可靠的保障。 三、建设背景及必要性 1、本期工程项目建设符地方经济和社会发展规划,项目建设必将推动地方相关行业的发展,对当地制造业及发展起到积极的示范、推动作用。 2、为确保完成目标任务,《中国制造2025》提出了深化体制机制改革、营造公平竞争市场环境、完善金融扶持政策、加大财税政策支持力度、健全多层次人才培养体系、完善中小微企业政策、进一步扩大制造业对外开放、健全组织实施机制等8个方面的战略支撑和保障。《中国制造2025蓝
智能机器人项目投资计划书
智能机器人项目投资计划书 xxx科技公司
摘要 本报告所描述的投资预算及财务收益预评估均以《建设项目经济评价 方法与参数(第三版)》为标准进行测算形成,是基于一个动态的环境和 对未来预测的不确定性,因此,可能会因时间或其他因素的变化而导致与 未来发生的事实不完全一致,所以,相关的预测将会随之而有所调整,敬 请接受本报告的各方关注以项目承办单位名义就同一主题所出具的相关后 续研究报告及发布的评论文章,故此,本报告中所发表的观点和结论仅供 报告持有者参考使用;报告编制人员对本报告披露的信息不作承诺性保证,也不对各级政府部门(客户或潜在投资者)因参考报告内容而产生的相关 后果承担法律责任;因此,报告的持有者和审阅者应当完全拥有自主采纳 权和取舍权,敬请本报告的所有读者给予谅解。 该智能机器人项目计划总投资15234.65万元,其中:固定资产投资11184.25万元,占项目总投资的73.41%;流动资金4050.40万元,占项目 总投资的26.59%。 达产年营业收入38370.00万元,总成本费用30041.80万元,税金及 附加292.86万元,利润总额8328.20万元,利税总额9769.78万元,税后 净利润6246.15万元,达产年纳税总额3523.63万元;达产年投资利润率54.67%,投资利税率64.13%,投资回报率41.00%,全部投资回收期3.94年,提供就业职位578个。
智能机器人的关键技术包括视觉、传感、人机交互和机电一体化等。 从应用角度分,智能机器人可以分为工业机器人和服务机器人。其中,工 业机器人一般包括搬运机器人、码垛机器人、喷涂机器人和协作机器人等。服务机器人可以分为行业应用机器人和个人/家用机器人。其中,行业应用 机器人包括智能客服、医疗机器人、物流机器人、引领和迎宾机器人等;个 人/家用机器人包括个人虚拟助理、家庭作业机器人(如扫地机器人)、儿童 教育机器人、老人看护机器人和情感陪伴机器人等。 概述、项目建设背景、项目调研分析、产品规划方案、选址分析、项 目工程设计说明、项目工艺及设备分析、环境保护和绿色生产、职业保护、项目风险、项目节能概况、进度计划、投资估算与资金筹措、经济评价、 项目综合评估等。
工业机器人背景介绍
郑州领航机器人有限公司 工业机器人的背景介绍 机器人是近代自动控制领域中出现的一项新技术,并成为现代机械制造中的一个重要组成部分。机器人显著地提高了劳动生产率,改善产品质量,对改善劳动条件和产品的快速更新换代起着十分重要的作用,加快实现工业生产机械化和自动化的步伐。尤其在高温、高压、粉尘、噪音以及带有放射性和污染的场合,应用的更为广泛。因而受到各先进国家的重视,投入大量人力物力加以研究和应用。 工业机器人是机器人学的一个分支,它代表了机电一体化的最高成就。工业机器人,一般指的是在工厂车间环境中,配合自动化生产的需要,代替人来完成材料或零件的搬运、加工、装配等操作的一种机器人。国际标准化组织(ISO)对工业机器人所下的定义是“机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能借助于可编程序操作来处理各种材料、零件、工具和专用设备,以执行种种任务”。它综合了机械工程、电子工程、计算机技术、自动控制及人工智能等多种科学的最新研究成果,是机电一体化技术的典型代表。随着科学技术的不断发展,人们对机器人的工作能力提出了更高的要求,不仅要求机器人的外形美观、操作简单,而且具有一定的稳定性、灵活性和开放性。
随着科学和技术的不断发展,在过去的几个世纪里,人类在许多方面都取得了重大的进展。机器人技术作为人类最伟大的发明之一,自2世纪60 年代初问世以来,经历了短短的50 年,已取得巨大的进步。工业机器人在经历了诞生、成长、成熟期后,已成为制造业中必不可少的核心装备,而且工业机器人不仅在工厂里成了工人必不可少的伙伴,而且正在以惊人的速度向航空航天、军事、服务、娱乐等人类生活的各个领域渗透。据世界机器人联合会统计,仅2014 年全球工业机器人销量就达到22.5万部,较上年增长27%,触及纪录最高点。预计2015 年增长率会更大。根据2012 年的统计,世界使用机器人最多的国家是日本,约31 万台;其次为美国、德国的16 万台和韩国的14 万台。 我国的工业机器人发展的历史已经有20 多年,从“七五”科技攻关开始,正式列入国家计划,在国家的组织和支持下,通过“七五”、“八五”科技攻关,不仅在机器人的基础理论和关键技术方面取得重大突破,而且在工业机器人整机方面,己经陆续掌握了喷漆、弧焊、点焊、装配和搬运等不同用途、典型的工业机器人整机技术,并成功的应用于生产,掌握了相关的应用工程知识。但总的看来,我国的工业机器人技术及其工程应用的水平和国外的相比还有一定的距离。我国目前拥有工业机器人为13 万台,位居世界第五。同发达国家相比,我国机器人密度仍然较低,因此机器人需求量很大,以目前25%的年增长率,我国工业机器人保有量有望在2018 年超越日本达到世界
乐高机器人教案
乐高机器人教案文档编制序号:[KKIDT-LLE0828-LLETD298-POI08]
乐高机器人—齿轮篇教案 在机器人的设计中,机械结构是完善系统的一个重要因素。要认识各种各样的传动机构,了解其工作原理及其优缺点,什么时候用哪种传动系统最有效等,从而设计出出色的机器人系统。 简介 齿轮是机器中很重要的部件,它几乎是机器的象征。探索齿轮的一种非常有用的特性:将一种力魔法般的转换成另外一种力。介绍一些新的概念——速度、力、扭矩、摩擦力;还有一些简单的机械理论基础。认识齿轮和简单杠杆之间的相似点。 齿数的计算 一般用中至少需要两个齿轮,如图所示,为两个普通的乐高齿轮:左边是8齿齿轮,右边是24齿齿轮。齿轮的最重要属性就是它的齿数。齿轮是根据齿数分类的:它的英文缩写就代表它的名字,例如24齿的齿轮可以表示为24t 。 图一个8齿和24齿的齿轮 例子中使用了8齿和24齿的两个齿轮,分别固定在一根轴上。两轴与一带孔梁相配合,两孔间距两个乐高单位(一个乐高单位就相当于相邻两孔间距),现在一手拿住梁,另一手轻轻地转动其中一根轴,注意到的第一个特性:当转动其中一根轴时,另一轴也同时转动,因此,齿轮的基本属性就是可以将运动从一根轴传到其它轴上。第二个特点是你不需要用很大的力去转动它们,因为齿轮间配合相当紧凑,摩擦力很小,这也是乐高工艺系统大特性之一:部件之间配合精度高。第三个特点是两根轴反向转动:一
个顺时针,一个逆时针。第四个特点:也是最重要的特性,就是两根轴的旋转速度不同。当转动8齿齿轮时,24齿齿轮转动得很慢;而24齿的齿轮转动时,8齿齿轮转动得很快。 加速和减速传动 先转动大齿轮(24齿),它的每一个齿都与8齿的两个齿啮合的很好。当转动24齿,每一次在齿轮的接触面一个新齿取代前一个齿时,8齿也刚好转过一个齿,因此,大齿轮转过8个齿(24齿的齿轮)就可以让小齿轮转过一圈(360度)。当大齿轮再转过8个齿时,小齿轮又转了一圈。在你转动24齿齿轮的最后8个齿时,8齿齿轮转过第三圈。这也是两轴产生不同速度的原因:24齿齿轮转动一圈,8齿齿轮转动了三圈!我们用两个齿轮齿数之比来表示两者的关系:24比8。经过简化,得到3:1。从数字来看,24齿齿轮1转就相当与8齿齿轮的3转。 由此,我们得到一种加速的方法(从技术角度来将应称为角速度,而不是速度)。这时候你可能会想到在竞速小车上使用巨大的传动比。遗憾的是,在力学中有得必有失,获得了速度,同时就减少了扭矩,简单的说,就是在力量上的损失会转化为速度——速度越快,扭矩就越小。比率也相同:如果获得了三倍的角速度,你的扭矩会减小到原来的1/3。 齿轮有一个有趣的特性:扭矩和速度的转换是对称的,你可以将扭矩转换成速度,反之亦然。当系统增加速度而减小扭矩时,我们称为加速,反之我们称为减速。
乐高教案
教学内容(课题) 初识乐高积木与乐高交朋友:了解机器人、 教学目的知识与技能:认识新环境中的新朋友,成立团队,激发兴趣,热爱生活,热爱科技,建立自信心。 过程与方法:介绍乐高机器人,多媒体展示以往机器人比赛片断,制定公约,展示机器人套装。情感态度与价值观:开拓视野,激发对科技的兴趣,热爱生活。 教学重点及难点 点 重点:适应新环境,建立团队,认识乐高机器人。 难点:让学生主动发挥联想,积极动手实践,激发兴趣,发挥联想,以机器人结合生活应用,参与讨论表达 教学过程。 应用,参与讨论表达。 提问(12分钟) 大家能说说,什么是机器人吗(认知过程) 抢答提问后,老师作引导性说明。 GOOGLE网络定义:机器人是自动控制机器(Robot)的俗称,自动控制机器包括一切模拟人类行为或思想与模拟其他生物的机械(如机器狗,机器猫等)。 机器人技术作为20世纪人类最伟大的发明之一,从60年代初问世以来,经历四十多年的发展已取得长足的进步。 在制造业中,工业机器人甚至已成为不可少的核心装备,世界上有近百万台工业机器人正与工人朋友并肩战斗在各条战线上。 机器人的出现是社会和经济发展的必然,它的高速发展提高了社会的生产水平和人类的生活质量。 2、大家所见到过的机器人有(记忆发掘,联想) 服务机器人可以为您治病保健、保洁保安;水下机器人可以帮助打捞沉船、铺设电缆;工程机器人可以上山入地、开洞筑路;农业机器人可以耕耘播种、施肥除虫;军用机器人可以冲锋陷阵、排雷排弹…… 3、机器人能为我们做些什么(结合生活发挥联想) 在现实生活中有些工作会对人体造成伤害,比如喷漆、重物搬运等;有些工作要求质量很高,人难以长时间胜任,比如汽车焊接、精密装配等;有些工作人员无法身临其境,比如火山探险、深海探密、空间探索等;有些工作不适合人去干,比如一些恶劣的环境、一些枯燥单调的重复性劳作等……这些人们干不了或干不好的领域变成了机器人大显身手的舞台。 4、为什么我们要学习机器人,创造机器人人 机器人能为而类服务。能帮助我们做一些人类比较困难或者无法解决的问题。例如以上所说的,深海探密、空间探索等。 5、机器人需要吃饭吗(引发兴趣,开口讨论) 机器人也需要”吃饭”,只是他们所吃的饭,跟我们的不一样。他们可能需要的是电能、石油、汽油、天然气、或者是太阳能,等等。概括介绍机器人、乐高机器人,播放关于机器人比赛视频。(15分钟) 初次接触,通过听觉了解后,为加深印象,观看现实生活中机器人短片和图片,再而观看乐高机器人短片和图片。
工业机器人技术课程总结()
工业机器人技术课程总结 任课: 班级: 学号: 姓名: 之前在工厂实习见识和操作过很多工业机器人,有焊接机器人,涂装机器人,总装机器人等,但是学习了盖老师教授的工业机器人课程,才真正算是进入了工业机器人的理论世界学习机器人的相关知识。以下是课程总结。 一、第一章主要是对机器人的概述,从机器人的功能和应用、机器人的机构以及机器人的规格全面呈现学习机器人的框架。 研制机器人的最初目的是为了帮助人们摆脱繁重劳动或简单的重复劳动,以及替代人到有辐射等危险环境中进行作业,因此机器人最早在汽车制造业和核工业领域得以应用。随着机器人技术的不断发展,工业领域的焊接、喷漆、搬运、装配、铸造等场合,己经开始大量使用机器人。另外在军事、海洋探测、航天、医疗、农业、林业甚到服务娱乐行业,也都开始使用机器人。本书主要介绍工业机器人,对譬如军用机器人等涉及不多。 机器人的机构方面,主要介绍了操作臂的工作空间形式、手腕、手爪、和闭链结构操作臂。工作空间形式常见的有直角坐标式机器人、圆柱坐标式机器人、球(极)坐标式机器人、SCARA机器人以及关节式机器人。手腕的形式也可分为二自由度球形手腕、三轴垂直相交的手腕以及连续转动手腕。同时手爪也可分为夹持式手爪、多关节多指手爪、顺应手爪。机器人的其他规格主要介绍驱动方式、自动插补放大、坐标轴数、工作空间、承载能力、速度和循环时间、定位基准和重复性以及机器人的运行环境。第一章的内容主要是对机器人各个方面有个简单的介绍使机器人更形象化和具体化。工业机器人定义为一种拟人手臂、手腕和手功能的机电一体化装置,能将对象或工具按照空间位置姿态的要求移动,从而完成某一生产的作业要求。工业机械应用:主要代替人从事危险、有害、有毒、低温和高热等恶劣环境中的工作;代替人完成繁重、单调重复劳动。它带来的好处:减少劳动力费用提高生产率改进产品质量增加制造过程柔性减少材料浪费控制和加快库存的周转消除了危险和恶劣的劳动岗位。机器人的直角坐标型:结构简单;定位精度高;空间利用率低;操作范围小;
智能机器人校本课程开发与实施课题主体报告记录
智能机器人校本课程开发与实施课题主体报告记录
作者:日期:
“智能机器人”校本课程开发与实施研究 (主体报告) 一、课题研究的背景和价值 智能机器人是信息技术发展的前沿领域,是一门具有高度综合渗透性、前瞻未来性、创新实践性的学科,蕴涵着极其丰富的教育资源。 把机器人教育引入中小学,不仅有利于信息技术教育的发展;有利于我们探索教育改革和人才培养的新途径、新方法;有利于高素质人才的培养;同时将推动我国智能机器人知识和技术的普及。学生们在学习机器人技术的过程中能综合的了解到诸多领域的先进技术,并亲身接触和体验现代高新技术,可以激发他们爱科学、学科学、用科学的浓厚兴趣,使他们在获得科技知识和实践能力的同时,激发他们的创新意识和创造发明的潜能,提高他们的综合素质。 我校在市区教育装备中心及学校的大力支持下,于2004 年3 月成立机器人工作室,经过这几年的改进和提高,实验室现有智能机器人近50 套,专业铺导 教师3 名。在这段时间里,我们参加了市、省、全国各类比赛,也取得了比较好的成绩。如:全国第五届青少年机器人竞赛小学组足球亚军、浙江省第四届青少年机器人竞赛小学组创意一等奖等荣誉。2006年1 月被评为首批“全国中小学机器人教学实验学校” 。 2006 学年在各级领导的重视下,我校在六年级进行了课堂教学实验,在此过程中不断反思不断改革,一学年的实验效果较好。2007 学年,六年级机器人课堂教学全面铺开,每周一节机器人课,学生积极性都非常高涨。 在我们不断进步,机器人教学全面铺开的同时,我们同样遇到了非常多的问题,如教材的开发,教学模式的探索,评价体系的建立,机器人器材的合理分配,管理等。因此提出《“智能机器人”校本课程开发与实施研究》这一课题,希望以课题为引领,有计划,有目的的对前期的工作进行梳理总结,并对产生的新问题,新想法进行探究,以期开发出面向全体学生,可操作性强,绩效性高的“智能机器人” 校本课程。我们希望通过本课题的研究,把学校教育和科技教育有机的联系起来,结合本校的教育资源和教育特色,
智能机器人项目投资计划书
智能机器人项目 投资计划书 规划设计/投资分析/产业运营
报告说明— 该智能机器人项目计划总投资12626.00万元,其中:固定资产投资9242.88万元,占项目总投资的73.21%;流动资金3383.12万元,占项目 总投资的26.79%。 达产年营业收入32598.00万元,总成本费用25440.89万元,税金及 附加267.02万元,利润总额7157.11万元,利税总额8411.32万元,税后 净利润5367.83万元,达产年纳税总额3043.49万元;达产年投资利润率56.69%,投资利税率66.62%,投资回报率42.51%,全部投资回收期3.85年,提供就业职位516个。 智能机器人的关键技术包括视觉、传感、人机交互和机电一体化等。 从应用角度分,智能机器人可以分为工业机器人和服务机器人。其中,工 业机器人一般包括搬运机器人、码垛机器人、喷涂机器人和协作机器人等。服务机器人可以分为行业应用机器人和个人/家用机器人。其中,行业应用 机器人包括智能客服、医疗机器人、物流机器人、引领和迎宾机器人等;个 人/家用机器人包括个人虚拟助理、家庭作业机器人(如扫地机器人)、儿童 教育机器人、老人看护机器人和情感陪伴机器人等。
目录 第一章基本情况 第二章投资单位说明 第三章背景、必要性分析第四章产品规划分析 第五章选址科学性分析 第六章项目工程设计说明第七章工艺原则及设备选型第八章环境保护可行性 第九章项目职业安全 第十章风险性分析 第十一章节能评价 第十二章项目进度计划 第十三章投资方案说明 第十四章经济效益可行性 第十五章综合结论 第十六章项目招投标方案
工业机器人技术应用
2018年江苏省高等职业院校技能大赛 “工业机器人技术应用”赛项竞赛规程 一、赛项名称 工业机器人技术应用 二、竞赛目的 赛项以“中国制造2025”规划为背景,针对装备制造业转型升级对岗位技能提升的要求,引导职业院校关注行业在“工业机器人技术应用”方面的发展趋势及新技术的应用,促进工学结合人才培养模式和课程的改革与创新。通过技能大赛,展示参赛选手维护、调试、操控机器人的技能,检阅参赛队组织管理、团队协作、工作效率、质量与成本控制、安全意识等职业素养,提升高职院校专业教师的指导水平,以赛促教,为工业机器人及系统在企业中的应用提供人才保障。 三、竞赛方式 竞赛为团体赛。每支参赛队最多由6人组成,其中领队1人(可由指导教师兼任),参赛选手3人(其中队长1人),指导教师2人。 四、竞赛内容 参赛选手在规定时间(4小时30分钟)内,以现场操作的方式,根据赛场提供的有关资料和赛项任务书,完成基本赛项任务及综合赛项任务。 基本赛项任务: 1.生产线空间位置调整、传感器安装及基本功能调试。 2.六关节机器人手爪的安装及手爪控制设备的安装调试。 3.六关节机器人参数设定、标定、现场示教编程及复现;六关节机器人安全工作区间建立。 4.AGV机器人上部输送线安装与调试;工业以太网络连接等。
5.按任务要求完成机器视觉系统的设定、流程编辑,实现托盘流水线上的缺陷工件检测和工件形状种类的识别、工件库建立及坐标变换。 6.完成满足控制要求的立库码垛机和主控系统的人机界面及PLC 控制程序编制。 7.主控PLC、触摸屏、六关节机器人、流水线、立体仓库的网络建立和程序联调测试。 综合赛项任务: 1.由裁判将放有工件的托盘随机摆放到立库各仓位中,由立库码垛机根据赛项任务书的要求,依次取出托盘并放置到磁导AGV小车上。 2.磁导AGV小车每次可以携带3个托盘,沿着磁导线运动并对接到托盘流水线,自动完成立库与托盘流水线之间的工件运输。 3.托盘流水线上设置了视觉检测系统,通过对托盘上的工件进行识别,区分出不同的工件;并将托盘中工件的坐标数据传送到主控PLC 中。 4.由主控PLC通过工业网络操控多关节机器人实现所有工件的抓取、摆放和装配。 1)选用合适的工具自动抓取托盘上不同类型的工件,对合格工件和缺陷工件进行分拣; 2)根据赛项任务书的要求,将抓取的合格工件摆放在装配流水线上的相应位置以完成装配。工件在装配流水线上的具体摆放方式以及装配要求在赛项任务书中有明确规定。 五、竞赛试题 (一)采取提前公开竞赛样题的方式进行比赛,赛前一个月公布样题。 (二)备有10套以上竞赛用试题,每场次比赛试卷由赛点裁判组
智能跟随机器人项目申请书
申请编号: 入选编号: 上海市研究生创新创业能力培养计划项目申请书 项目名称:智能跟随机器人 所在高校: 申请部门负责人: 申请部门负责人职务、职称: 上海市大学生科技创业基金会制表 填表日期:年月日
填表说明 一、填写本申请书前,应仔细阅读《上海市研究生创新创业能力培养计划管理办 法》、《关于开展2017年上海市研究生创新创业能力培养计划申报工作的通知》等有关文件,务必实事求是地填写。 二、本申请书作为上海市研究生创新创业能力培养计划评审入选与培养创业项目 存档备查之用,用A4纸打印,使用骑马钉左侧装订,封面之上不得另加其他封面。申请单位须在规定时间内将本申请书一式2份及表格电子版光盘报送上海市大学生科技创业基金会。 三、研究生申请书须经研究生教育管理单位(部门)审核,本科生申请书须经创 业基金会分会审核,签署明确意见并加盖公章后方可上报。 四、部分栏目填写说明: 1.封面上“申请编号”、“入选编号”由创业基金会填写。 2.学科门类名称、学科名称及其代码按照国务院学位委员会颁布的《学位授 予和人才培养学科目录(2011年)》填写。 3.本表中涉及的人员均指人事关系隶属本单位的在编人员,兼职人员不计在 内。除学术带头人简况外,表中涉及的成果(论文、专著、专利、科研奖项、教学成果等)指本学科人员署名本单位获得的成果,凡署名其他单位所获得的成果不填写、不统计。 4.封面“申请部门负责人”一般应为高校研究生教育管理部门或者分会负责 人;申请内容中的“项目申请人”应为申请培训的研究生或本科生,项目团队成员不超过5人。 5.本表填写内容不涉及国家秘密并可公开。 6.本申请书所有信息必须全部填写,空白处请一律填“无”。
智能机器人项目商业计划书
智能机器人项目商业计划书 第一章总论 (1) 1.1 创业背景 (1) 1.1.1 什么是教育机器人 (1) 1.1.2 教育机器人的作用 (1) 1.2 公司简介 (1) 1.2.1 公司名称 (1) 1.2.2 公司性质 (2) 1.2.3 公司选址 (2) 1.2.4 核心技术 (2) 1.2.5 主要产品 (2) 1.2.6 公司规模 (2) 第二章市场分析 (3) 2.1 教育机器人产生背景 (3) 2.2 发展现状 (3) 2.3 主要利用领域 (4) 2.3.1 竞赛 (4) 2.3.2 教学 (4) 2.4 主要消费市场分析 (5) 2.4.1 美国 (5) 2.4.2 日本 (5) 2.4.3 中国 (6) 2.5 国内行业分析 (6) 2.5.1 行业现状 (6) 2.5.2 国内主要生产厂家 (7) 2.6 公司目标市场 (8) 第三章生物智能芯片简介 (9) 3.1 生物芯片的定义 (9) 3.2 生物智能芯片 (9) 第四章公司主要产品 (10) 4.1 灭火机器人 (10)
4.2 足球机器人 (10) 4.3智能移动机器人 (10) 第五章销售策略 (11) 5.1 总体战略 (11) 5.1.1 品牌效应 (11) 5.1.2 广告宣传 (11) 5.1.3 完善的售后服务 (11) 5.2 推广策略 (12) 5.2.1 赠送样品 (12) 5.2.2 提供比赛经费 (12) 第六章财务分析 (13) 6.1 工厂前期投资 (13) 6.1.1 设备投资 (13) 6.1.2 基础建设投资 (13) 6.1.3 递延资产 (13) 6.1.4 预备费用 (13) 6.1.5 固定资产投资计算 (14) 6.2 资金来源 (14) 6.3 建设期总投资 (15) 6.4 生产后期投资 (15) 6.4.1 原料 (15) 6.4.2 人力投资 (15) 6.4.3 摊销及折旧费用 (15) 6.4.4 设备维修费用 (16) 6.4.5 研发费用 (16) 6.4.6 费用总计 (17) 6.5 经济分析 (17) 6.5.1 产品销售估计 (17) 6.5.2 税金估计 (18) 6.5.3 损益表 (19) 6.5.4 现金流量表 (19) 6.5.5 动态指标 (20) 第七章机遇与风险 (22) 7.1 机遇 (22) 7.2 风险 (22) 7.2.1 外部风险 (22) 7.2.2 内部风险 (22) 7.3 应对政策 (22) 附:个人体会 (24)