基于Matlab的车辆动力学仿真及实现
基于Matlab的车辆动力学仿真及实现
作者:黄道田, 黄道敏
作者单位:黄道田(汉江集团水力发电厂,湖北,丹江口 442700), 黄道敏(空军预警学院,湖北,武汉 430019)刊名:
机电一体化
英文刊名:Mechatronics
年,卷(期):2013,19(1)
参考文献(9条)
1.雷雨成;赵清亮;郑德林汽车全工况操纵和制动动力学17自由度的建模与仿真 1996(06)
2.郭孔辉汽车操纵动力学 1991
3.M米奇克;陈萌三汽车动力学C卷 1997
4.雷雨成汽车系统动力学及仿真 1997
5.安部正人汽车的运动和操纵 1998
6.韩宗奇;余志生;万嘉璜汽车转弯制动性能的模拟计算 1991(01)
7.S MAMMAR;SAINTE-MARIE J;GLASER S On the Use of Steer-by-Wire Systems in Lateral Driving Assistance Applications,Robot and Human Interactive Communication 2001
8.DJ哈特;鲍维千;陆冠东;范佩鑫振动分析矩阵法 1982
9.GUVENC B A;ACARMAN T;GUVENC,L Coordination of steering and individual wheel braking actuated vehicle yaw stability control 2003
引用本文格式:黄道田.黄道敏基于Matlab的车辆动力学仿真及实现[期刊论文]-机电一体化 2013(1)
现代信号处理Matlab仿真——例611
例6.11 利用卡尔曼滤波估计一个未知常数 题目: 设已知一个未知常数x 的噪声观测集合,已知噪声v(n)的均值为零, 方差为 ,v(n)与x 不相关,试用卡尔曼滤波估计该常数 题目分析: 回忆Kalman 递推估计公式 由于已知x 为一常数,即不随时间n 变化,因此可以得到: 状态方程: x(n)=x(n-1) 观测方程: y(n)=x(n)+v(n) 得到A(n)=1,C(n)=1, , 将A(n)=1,代入迭代公式 得到:P(n|n-1)=P(n-1|n-1) 用P(n-1)来表示P(n|n-1)和P(n-1|n-1),这是卡尔曼增益表达式变为 从而 2v σ1??(|1)(1)(1|1)(|1)(1)(1|1)(1)()()(|1)()[()(|1)()()]???(|)(|1)()[()()(|1)](|)[()()](|1)H w H H v x n n A n x n n P n n A n P n n A n Q n K n P n n C n C n P n n C n Q n x n n x n n K n y n C n x n n P n n I K n C n P n n --=----=----+=--+=-+--=--2()v v Q n σ=()0w Q n =(|1)(1)(1|1)(1)()H w P n n A n P n n A n Q n -=----+21 ()(|1)[(|1)]v K n P n n P n n σ-=--+22(1)()[1()](1)(1)v v P n P n K n P n P n σσ-=--=-+
Matlab仿真实例-卫星轨迹
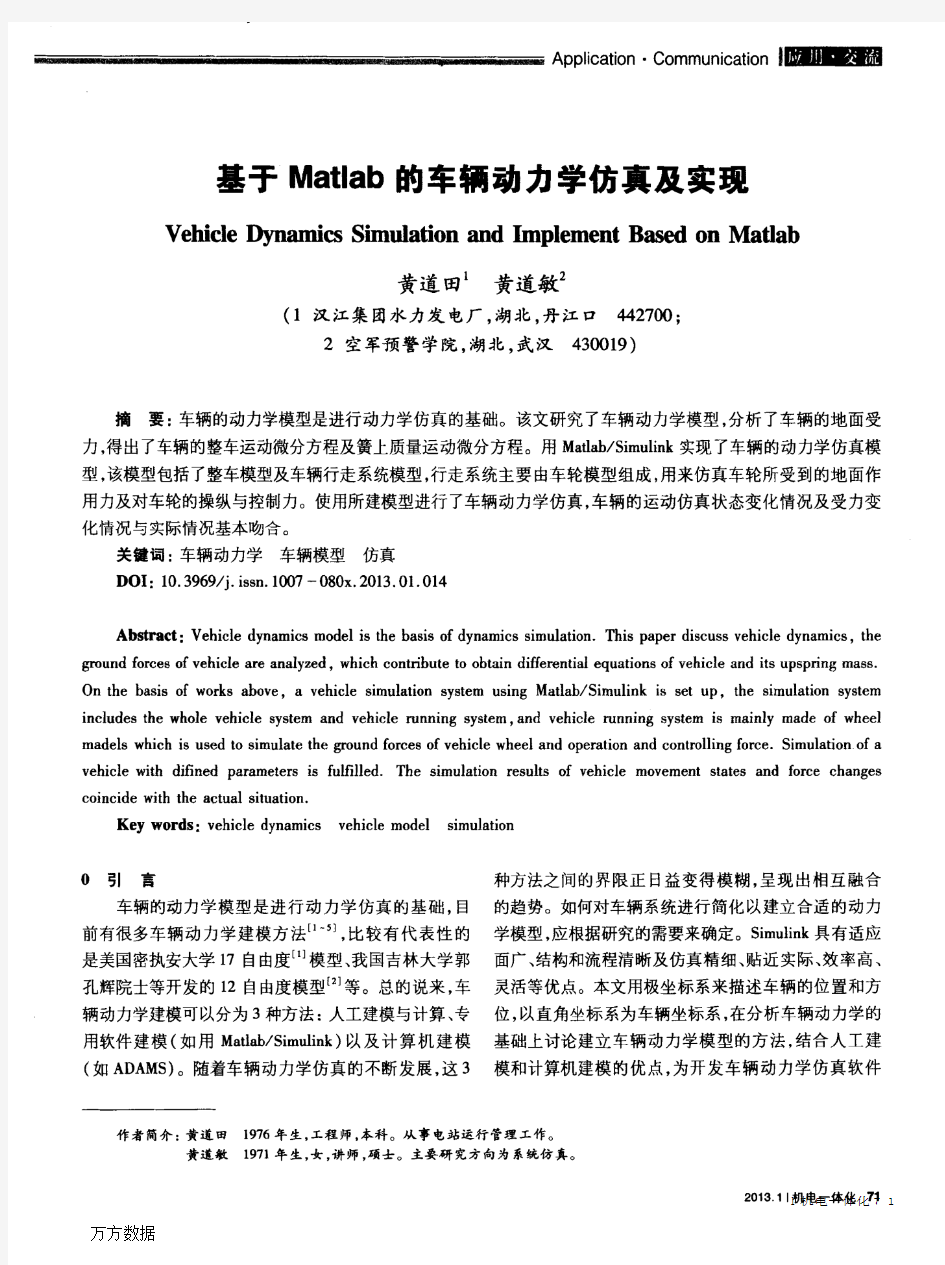
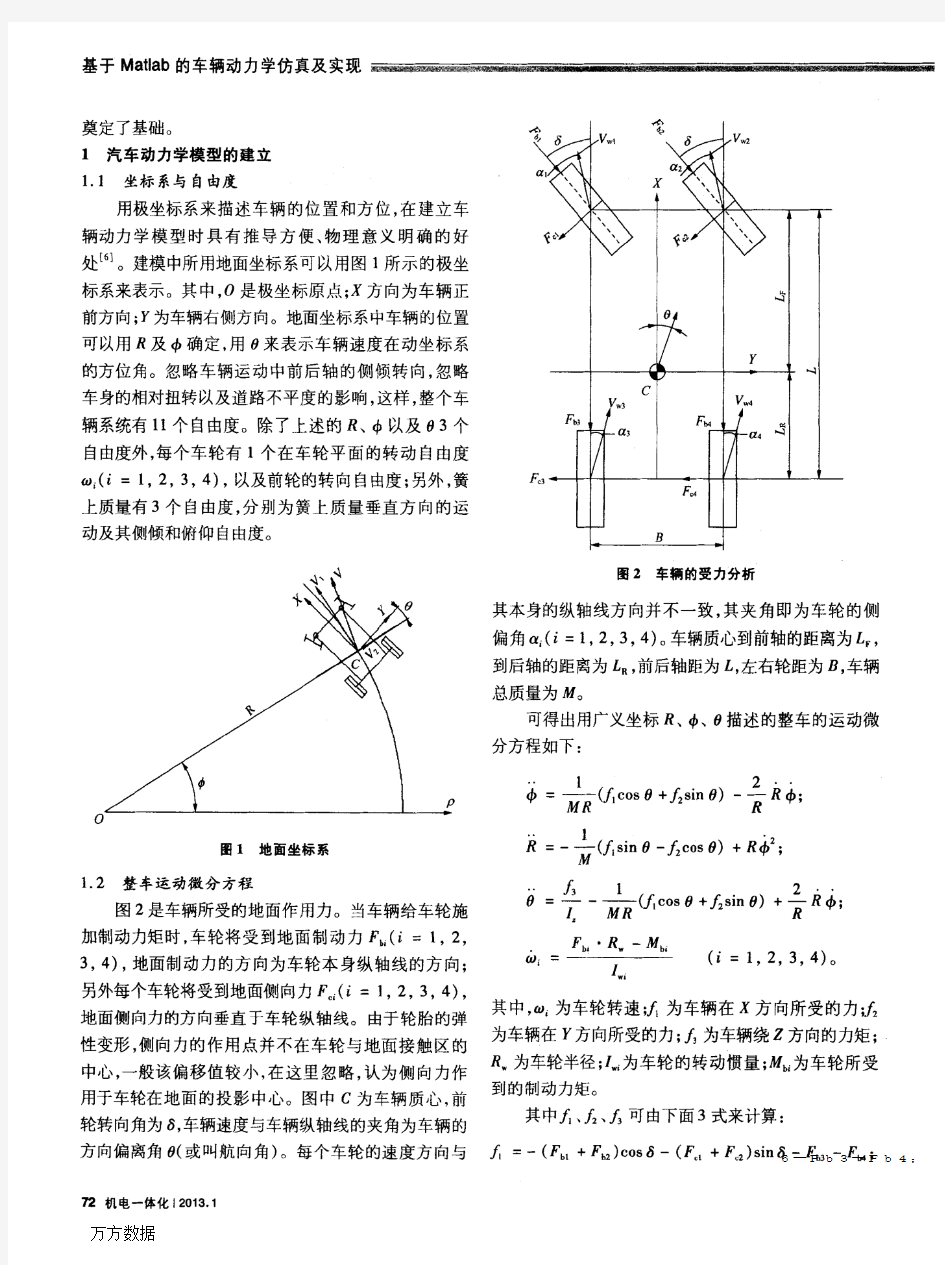
卫星轨迹 一.问题提出 设卫星在空中运行的运动方程为: 其中是k 重力系数(k=401408km3/s)。卫星轨道采用极坐标表示,通过仿真,研究发射速度对卫星轨道的影响。实验将作出卫星在地球表面(r=6400KM ,θ=0)分别以v=8KM/s,v=10KM/s,v=12KM/s 发射时,卫星绕地球运行的轨迹。 二.问题分析 1.卫星运动方程一个二阶微分方程组,应用Matlab 的常微分方程求解命令ode45求解时,首先需要将二阶微分方程组转换成一阶微分方程组。若设,则有: 2.建立极坐标如上图所示,初值分别为:卫星径向初始位置,即地球半径:y(1,1)=6400;卫星初始角度位置:y(2,1)=0;卫星初始径向线速度:y(3,1)=0;卫星初始周向角速度:y(4,1)=v/6400。 3.将上述一阶微分方程及其初值带入常微分方程求解命令ode45求解,可得到一定时间间隔的卫星的径向坐标值y(1)向量;周向角度坐标值y(2)向量;径向线速度y(3)向量;周向角速度y(4)向量。 4.通过以上步骤所求得的是极坐标下的解,若需要在直角坐标系下绘制卫星的运动轨迹,还需要进行坐标变换,将径向坐标值y(1)向量;周向角度坐标值y(2)向量通过以下方程转换为直角坐标下的横纵坐标值X,Y 。 5.卫星发射速度速度的不同将导致卫星的运动轨迹不同,实验将绘制卫星分别以v=8KM/s ,v=10KM/s ,v=12KM/s 的初速度发射的运动轨迹。 三.Matlab 程序及注释 1.主程序 v=input('请输入卫星发射速度单位Km/s :\nv=');%卫星发射速度输入。 axis([-264007000-1000042400]);%定制图形输出坐标范围。 %为了直观表达卫星轨迹,以下语句将绘制三维地球。 [x1,y1,z1]=sphere(15);%绘制单位球。 x1=x1*6400;y1=y1*6400;???????-=+-=dt d dt dr r dt d dt d r r k dt r d θ θθ2)(2 22222θ==)2(,)1(y r y ?????????????**-=**+*-===)1(/)4()3(2)4()4()4()1()1()1()3()4()2() 3()1(y y y dt dy y y y y y k dt dy y dt dy y dt dy ???*=*=)] 2(sin[)1(Y )]2(cos[)1(X y y y y
汽车系统动力学Matlab
汽车系统动力学Matlab 作业报告 小组成员:
'组内任务分配
二、 Matlab 程序与图形 1、不同转向特性车辆在不同车速下的系统特征根 m=1000;I=1500;a1=1.15;b1=1.35;Caf=53000;Car=53000; i=1;R=[]; for uc=10:5:100; D=(l*(Caf+Car)+m*(a1^2*Caf+b1^2*Car))∕(m*l*uc); S=(a1+b1)^2*Caf*Car∕(m*l*uc^2)+(b1*Car-a1*Caf)∕l; P=[1 D S]; r=roots(P); R(i,1)=r(1,1);R(i,2)=r(2,1);i=i+1; end plot(real(R(:,1)),imag(R(:,1)),'bo'); hold a2=1.25; b2=1.25; t=1; S=[]; for uc=10:5:100 P=[m 0;0 l]; Q=[(Caf+Car)∕uc,m*uc+(a2*Caf-b2*Car)∕uG(a2*Caf-b2*Car)∕uc,(a2^2*Caf+b 2^2*Car)∕uc]; R=[Caf;a2*Caf]; A=-P^(-1)*Q; d=eig(A); i=imag(d); r=real(d); S(t,1)=r(1); S(t,2)=i(1); t=t+1; end plot(S(:,1),S(:,2),'*') a3=1.35; b3=1.15; for uc=10:5:100 P=[m 0;0 l];
Q=[(Caf+Car)∕uc,m*uc+(a3*Caf -b3*Car)∕uc; (a3*Caf-b3*Car)∕uc,(a3^2*Caf+b3^2*Car)∕uc]; R=[Caf;a3*Caf]; A=-P^(-1)*Q; d=eig(A); i=imag(d); r=real(d); S(t,1)=r(1); S(t,2)=i(1); t=t+1; end grid On Plot(S(:,1),S(:,2),'d'); axis([-14 2 0 3]); xlabel('实轴(Re)'); ylabel('虚轴(Im)'); text(-8,2.8,'不足转向'); text(0,0.2,'过多转向'); text(-3,0.2,'中性转向') set(gca,'Fo ntName','Helvetica','Fo ntSize',10) title(['不同转向特性车辆在不同车速下的系统特征根'],'FontSize',12); E 一 書不同转向特杵乍辆在不同乍速下的系统待征戕
MATLAB实现通信系统仿真实例
补充内容:模拟调制系统的MATLAB 仿真 1.抽样定理 为了用实验的手段对连续信号分析,需要先对信号进行抽样(时间上的离散化),把连续数据转变为离散数据分析。抽样(时间离散化)是模拟信号数字化的第一步。 Nyquist 抽样定律:要无失真地恢复出抽样前的信号,要求抽样频率要大于等于两倍基带信号带宽。 抽样定理建立了模拟信号和离散信号之间的关系,在Matlab 中对模拟信号的实验仿真都是通过先抽样,转变成离散信号,然后用该离散信号近似替代原来的模拟信号进行分析的。 【例1】用图形表示DSB 调制波形)4cos()2cos(t t y ππ= 及其包络线。 clf %%计算抽样时间间隔 fh=1;%%调制信号带宽(Hz) fs=100*fh;%%一般选取的抽样频率要远大于基带信号频率,即抽样时间间隔要尽可能短。 ts=1/fs; %%根据抽样时间间隔进行抽样,并计算出信号和包络 t=(0:ts:pi/2)';%抽样时间间隔要足够小,要满足抽样定理。 envelop=cos(2*pi*t);%%DSB 信号包络 y=cos(2*pi*t).*cos(4*pi*t);%已调信号 %画出已调信号包络线 plot(t,envelop,'r:','LineWidth',3); hold on plot(t,-envelop,'r:','LineWidth',3); %画出已调信号波形 plot(t,y,'b','LineWidth',3); axis([0,pi/2,-1,1])% hold off% xlabel('t'); %写出图例 【例2】用图形表示DSB 调制波形)6cos()2cos(t t y ππ= 及其包络线。 clf %%计算抽样时间间隔 fh=1;%%调制信号带宽(Hz) fs=100*fh;%抽样时间间隔要足够小,要满足抽样定理。 ts=1/fs; %%根据抽样时间间隔进行抽样
matlab动力学解析程序详解
·· 1.微分方程的定义 对于duffing 方程03 2 =++x x x ω ,先将方程写作??? --==3 1122 21x x x x x ω function dy=duffing(t,x) omega=1;%定义参数 f1=x(2); f2=-omega^2*x(1)-x(1)^3; dy=[f1;f2]; 2.微分方程的求解 function solve (tstop) tstop=500;%定义时间长度 y0=[0.01;0];%定义初始条件 [t,y]=ode45('duffing',tstop,y0,[]); function solve (tstop) step=0.01;%定义步长 y0=rand(1,2);%随机初始条件 tspan=[0:step:500];%定义时间范围 [t,y]=ode45('duffing',tspan,y0); 3.时间历程的绘制 时间历程横轴为t ,纵轴为y ,绘制时只取稳态部分。 plot(t,y(:,1));%绘制y 的时间历程 xlabel('t')%横轴为t ylabel('y')%纵轴为y
·· grid;%显示网格线 axis([460 500 -Inf Inf])%图形显示范围设置 4.相图的绘制 相图的横轴为y ,纵轴为dy/dt ,绘制时也只取稳态部分。红色部分表示只取最后1000个点。 plot(y(end-1000:end ,1),y(end-1000:end ,2));%绘制y 的时间历程 xlabel('y')%横轴为y ylabel('dy/dt')%纵轴为dy/dt grid;%显示网格线 5.Poincare 映射的绘制 对于不同的系统,Poincare 截面的选取方法也不同 对于自治系统一般每过其对应线性系统的固有周期,截取一次 对于非自治系统,一般每过其激励的周期,截取一次 例程:duffing 方程03 2=++x x x ω 的poincare 映射 function poincare(tstop) global omega; omega=1; T=2*pi/omega;%线性系统的周期或激励的周期 step=T/100;%定义步长为T/100 y0=[0.01;0];%初始条件 tspan=[0:step:100*T];%定义时间范围 [t,y]=ode45('duffing',tspan,y0); for i=5000:100:10000%稳态过程每个周期取一个点 plot(y(i,1),y(i,2),'b.'); hold on;% 保留上一次的图形 end
matlab动力学分析程序详解
1 1.微分方程的定义 对于duffing 方程03 2 =++x x x ω ,先将方程写作??? --==3 1122 21x x x x x ω function dy=duffing(t,x) omega=1;%定义参数 f1=x(2); f2=-omega^2*x(1)-x(1)^3; dy=[f1;f2]; 2.微分方程的求解 function solve (tstop) tstop=500;%定义时间长度 y0=[0.01;0];%定义初始条件 [t,y]=ode45('duffing',tstop,y0,[]); function solve (tstop) step=0.01;%定义步长 y0=rand(1,2);%随机初始条件 tspan=[0:step:500];%定义时间范围 [t,y]=ode45('duffing',tspan,y0); 3.时间历程的绘制 时间历程横轴为t ,纵轴为y ,绘制时只取稳态部分。 plot(t,y(:,1));%绘制y 的时间历程 xlabel('t')%横轴为t ylabel('y')%纵轴为y grid;%显示网格线
2 axis([460 500 -Inf Inf])%图形显示范围设置 4.相图的绘制 相图的横轴为y ,纵轴为dy/dt ,绘制时也只取稳态部分。红色部分表示只取最后1000个点。 plot(y(end-1000:end ,1),y(end-1000:end ,2));%绘制y 的时间历程 xlabel('y')%横轴为y ylabel('dy/dt')%纵轴为dy/dt grid;%显示网格线 5.Poincare 映射的绘制 对于不同的系统,Poincare 截面的选取方法也不同 对于自治系统一般每过其对应线性系统的固有周期,截取一次 对于非自治系统,一般每过其激励的周期,截取一次 例程:duffing 方程03 2=++x x x ω 的poincare 映射 function poincare(tstop) global omega; omega=1; T=2*pi/omega;%线性系统的周期或激励的周期 step=T/100;%定义步长为T/100 y0=[0.01;0];%初始条件 tspan=[0:step:100*T];%定义时间范围 [t,y]=ode45('duffing',tspan,y0); for i=5000:100:10000%稳态过程每个周期取一个点 plot(y(i,1),y(i,2),'b.'); hold on;% 保留上一次的图形 end xlabel('y');ylabel('dy/dt');
MATLAB电路仿真实例
题14.14 图(a)所示电路,已知 V )2cos(15S t u =二端口网络阻抗参数矩阵 Ω?? ????=46j 6j 10Z 求ab 端戴维南等效电路并计算电压o u 。 u -+o u 图题14.14 (一)手动求解: 将网络N 用T 型电路等效,如图(b)所示 S U +-o U 等效阻抗 Ω=-+-?+ -=4.6j615j6j6)15(6j 6j 4i Z 开路电压 V 2j302 15j6j6105j6OC =?∠?+-+=U V 1482 18.3j46.42j3j4j4Z j4OC o ?∠=+?=?+=U U i
所以 )1482cos(18.3o ?+=t u V (二)Matlab 仿真: ⒈分析:本次仿真需输入各阻抗Zl 、Z1、Z2、Z3、Z4以及激励源Us 的参数值,仿真结果需输出开路电压Uoc 、等效阻抗Zi 以及电感两端电压U0的幅值和相位信息,并绘制Uoc ,U0的值随时间变化的波形曲线。其中各元件与原图的对应关系如下图所示: ⒉编辑M 文件的源程序如下: clear %清空自定义变量 z1=4-6j;z2=6j;z3=10-6j;z4=5;us=15*exp(j*0);zl=4j;%输入各元件参数 zi=z1+(z2*(z3+z4)/(z2+z3+z4));%等效阻抗zi 的计算表达式uoc=us*z2/(z2+z3+z4);%开路电压uoc 的计算表达式u0=zl/(zi+zl)*uoc;%电感两端电压uo 的计算表达式disp('The magnitude of zi is'); %在屏幕上显示“The magnitude of zi is ”disp(abs(zi)) %显示等效阻抗zi 的模disp('The phase of zi is'); %在屏幕上显示“The phase of zi is ”disp(angle(zi)*180/pi)%显示等效阻抗zi 的辐角 disp('The magnitude of uoc is'); %在屏幕上显示“The magnitude of uoc is ” disp(abs(uoc))%显示开路电压uoc 的模
matlab-SIMULINK仿真实例资料
二并联杆数控螺旋面钻头尖刃磨机的机构仿真 一、仿真原理一、实训题目:全自动洗衣机控制系统 实训目的及要求: 1、掌握欧姆龙PLC的指令,具有独立分析和设计程序的能力 2、掌握PLC梯形图的基本设计方法 3、培养分析和解决实际工程问题的能力 4、培养程序设计及调试的能力 5、熟悉传输带控制系统的原理及要求 实训设备:: 1、OMRON PLC及模拟实验装置1台 2、安装CX-P编程软件的PC机1台 3、PC机PLC通讯的RS232电缆线1根 实训内容: 1、分析工艺过程,明确控制要求 (1)按下启动按扭及水位选择开关,相应的显示灯亮,开始进水直到高(中、低)水位,关水。 (2)2秒后开始洗涤。 (3)洗涤时,正转30秒停2秒;然后反转30秒停2秒。 (4)循环5次,总共320秒,然后开始排水。排水后脱水30秒。 图1 全自动洗衣机控制 2、统计I/O点数并选择PLC型号 输入:系统启动按钮一个,系统停止按钮一个,高、中、低水位控制开关三个,高、中、低液位传感器三个,以及排水液位传感器一个。
输出:进出水显示灯一盏,高、中、低水位显示灯各一盏,电机正、反转显示灯各一盏,排水、脱水显示灯灯各一盏。 PLC的型号:输入一共有9个,考虑到留有15%~20%的余量即9×(1+15%)=10.35,取整数10,所以共需10个输入点。输出共有8个,8×(1+15%)=9.2,取整数9,所以共需9个输出点。可以选OMRON公司的CPM1A/CPM2A 型PLC就能满足此例的要求。 3、I/O分配 表1 全自动洗衣机控制I/O分配表 输入输出 地址名称地址名称 00000 启动系统按钮01000 排水显示灯 00001 高水位选择按钮01001 脱水显示灯 00002 中水位选择按钮01002 进、出水显示灯 00003 低水位选择按钮01003 高水位显示灯 00004 排水液位传感器01004 中水位显示灯 00005 停止系统按钮01005 低水位显示灯 00006 高水位液位传感器01006 电机正转显示灯 00007 中水位液位传感器01007 电机反转显示灯 00008 低水位液位传感器 4、PLC控制程序设计及分析 实现功能:当按下按钮00000,中间继电器20000得电并自锁,按下停止按钮00005,中间继电器20000掉电。中间继电器20000为系统总启动。 实现功能:当按下按钮00001,中间继电器20001得电并自锁;当中间继电器20002、20003、20004、20007任意一个为ON,或按下停止按钮00005,或01000、01001为ON时,中间继电器20001掉电。
MATLAB电路仿真实例
题14.14 图(a)所示电路,已知 二端口网络阻抗参数矩阵 求ab 端戴维南等效电路并计算电压。 (一) 手动求解: 将网络N 用T 型电路等效,如图(b)所示 等效阻抗 开路电压 V )2cos(15S t u =Ω??????=46j 6j 10Z o u u -+o u (a)图题14.14 S U +-o U Ω=-+-?+-=4.6j615j6j6)15(6j 6j 4i Z V 2j30215j6j6105j6OC =?∠?+-+=U V 148218.3j46.42j3j4j4Z j4OC o ?∠=+?=?+=U U i
所以 V (二) Matlab 仿真: ⒈分析:本次仿真需输入各阻抗Zl 、Z1、Z2、Z3、Z4以及激励源Us 的参数值,仿真结果需输出开路电压Uoc 、等效阻抗Zi 以及电感两端电压U0的幅值和相位信息,并绘制Uoc ,U0的值随时间变化的波形曲线。 其中各元件与原图的对应关系如下图所示: ⒉编辑M 文件的源程序如下: clear %清空自定义变量 z1=4-6j;z2=6j;z3=10-6j;z4=5;us=15*exp(j*0);zl=4j; %输入各元件参数 zi=z1+(z2*(z3+z4)/(z2+z3+z4)); %等效阻抗zi 的计算表达式 uoc=us*z2/(z2+z3+z4); %开路电压uoc 的计算表达式 u0=zl/(zi+zl)*uoc; %电感两端电压uo 的计算表达式 disp('The magnitude of zi is'); %在屏幕上显示“The magnitude of zi is ” disp(abs(zi)) %显示等效阻抗zi 的模 disp('The phase of zi is'); %在屏幕上显示“The phase of zi is ” disp(angle(zi)*180/pi) %显示等效阻抗zi 的辐角 disp('The magnitude of uoc is'); %在屏幕上显示“The magnitude of uoc is ” disp(abs(uoc)) %显示开路电压uoc 的模 disp('The phase of uoc is'); %在屏幕上显示“The magnitude of uoc is ” ) 1482cos(18.3o ?+=t u
MATLAB仿真实例
一、实验目的 (1) 二、实验题目 (1) 三、实验内容 (1) 3.1傅里叶变换与傅里叶反变换 (1) 3.2题目一:正弦信号波形及频谱 (2) 3.2.1仿真原理及思路 (2) 3.2.2程序流程图 (3) 3.2.3仿真程序及运行结果 (3) 3.2.4实验结果分析 (5) 3.3题目二:单极性归零(RZ)波形及其功率谱 (5) 3.3.1仿真原理及思路 (5) 3.3.2程序流程图 (6) 3.3.3仿真程序及运行结果 (6) 3.3.4实验结果分析 (8) 3.4题目三:升余弦滚降波形的眼图及其功率谱 (8) 3.4.1仿真原理及思路 (8) 3.4.2程序流程图 (8) 3.4.3仿真程序及运行结果 (8) 3.4.4实验结果分析: (10) 3.5题目四:完成PCM编码及解码的仿真 (11) 3.5.1仿真原理及思路 (11) 3.5.2程序流程图 (12) 3.5.3仿真程序及运行结果 (12) 3.5.4实验结果分析 (15) 3.6附加题一:最佳基带系统的Pe~Eb\No曲线,升余弦滚降系数a=0.5,取 样值的偏差是Ts/4 (16) 3.6.1仿真原理及思路 (16) 3.6.2程序流程图 (16) 3.6.3仿真程序及运行结果 (16) 3.6.4实验结果分析 (18) 3.7附加题二:试作出Pe~Eb/No曲线。升余弦滚降系数a=0.5,取样时间无 偏差,但信道是多径信道,C(f)=|1-0.5-j2 ft|,t=T s/2 (18) 3.7.1仿真原理及思路 (18) 3.7.2程序流程图 (19) 3.7.3仿真程序及运行结果 (19) 3.7.4实验结果分析 (21) 四、实验心得 (21)
MATLAB 动力学公式
系统动力学方程为: Mx?J T K(L2)(L2?L1)=F(1) Iq+r0K(L2)(L2?L1)=u(2) 其中公式(1)的各符号如下 (M6×6,I3×3,r,R,r0,ES,L0,α1,α2,α3,Ja1,Ja2,Ja3,c均为常数) M6×6=diag([Jm1+R2m1,Jm2+R2m2,Jm3+R2m3,M,M,Je])(3) x6×1=[θ1(t),θ2(t),θ3(t),X(t),Y(t),?(t)]T(4) K(L2)3×3=ES?diag(L2)(5) L2=[L21(t) L22(t) L23(t) ]=[ L0?r0q1(t) L0?r0q2(t) L0?r0q3(t) ](6) L1=[√(X?Rcosθ1+rcos(?+α1))2+(Y?Rsinθ1+rsin(?+α1))2 √(X?Rcosθ2+rcos(?+α2))2+(Y?Rsinθ2+rsin(?+α2))2 √(X?Rcosθ3+rcos(?+α3))2+(Y?Rsinθ3+rsin(?+α3))2 ](7) L1=Jx(8) F6×1= [ F1(t) F2(t) F3(t) 0] (9) 其中公式(2)的各符号如下 I3×3=diag([Ja1,Ja2,Ja3])(10) q3×1=[q1(t),q2(t),q3(t)]T(11) u=[u1(t) u2(t) u3(t) ](12) X(t),Y(t),?(t)的变化规律为 X(t)=c?sin(3t)?cos?t(13) Y(t)=c?sin(3t)?sin?t(14) ?(t)=0(15) t∈[0,180](16)
matlab仿真实例
matlab仿真实例 实验五 MATLAB及仿真实验一、控制系统的时域分析 (一) 稳定性 1、系统传递函数为 G(s),试判断其稳定性。 程序: >> num=[3,2,5,4,6]; >> den=[1,3,4,2,7,2]; >> sys=tf(num,den); >> figure(1); >> pzmap(sys); >> title('零极点图') 由图可知:在S右半平面有极点,因此可知系统是不稳定的。 2、用MATLAB求出G(s)=(s^2+2*s+2)/(s^4+7*s^3+5*s+2)的极点。程序及结果: >> sys=tf([1,2,2],[1,7,3,5,2]); >> p=pole(sys)
p = -6.6553 0.0327 + 0.8555i 0.0327 - 0.8555i -0.4100 (二)阶跃响应 1、二阶系统G(s)=10/s^2+2*s+10 1)键入程序,观察并记录单位阶跃响应曲线: 程序: >> sys=tf(10,[1,2,10]); >> step(sys); >> title('G(s)=10/s^2+2*s+10单位阶跃响应曲线') 2)计算系统闭环跟、阻尼比、无阻尼振荡频率,并记录: 程序及结果: >> sys=tf(10,[1,2,10]); >> p=pole(sys)
p = -1.0000 + 3.0000i -1.0000 - 3.0000i >> [wn,z]=damp(sys) wn = 3.1623 3.1623 z = 0.3162 0.3162 3)记录实际测取的峰值大小,峰值时间和过渡过程时间,并填表: 实际值理论值 峰值Cmax 1.35s 峰值时间tp 1.05s 过渡时间 +5% 3.54s ts +2% 3.18s 程序: >> sys=tf(10,[1,2,10]); >> step(sys); >> title('G(s)=10/s^2+2*s+10单位阶跃响应曲线')
matlab仿真实例
实验五MATLAB及仿真实验 一、控制系统的时域分析 (一)稳定性 1、系统传递函数为G(s),试判断其稳定性。 程序: >> num=[3,2,5,4,6]; >> den=[1,3,4,2,7,2]; >> sys=tf(num,den); >> figure(1); >> pzmap(sys); >> title('零极点图') 由图可知:在S右半平面有极点,因此可知系统是不稳定的。 2、用MATLAB求出G(s)=(s^2+2*s+2)/(s^4+7*s^3+5*s+2)的极点。程序及结果: >> sys=tf([1,2,2],[1,7,3,5,2]); >> p=pole(sys) p = -6.6553 0.0327 + 0.8555i
0.0327 - 0.8555i -0.4100 (二)阶跃响应 1、二阶系统G(s)=10/s^2+2*s+10 1)键入程序,观察并记录单位阶跃响应曲线: 程序: >> sys=tf(10,[1,2,10]); >> step(sys); >> title('G(s)=10/s^2+2*s+10单位阶跃响应曲线') 2)计算系统闭环跟、阻尼比、无阻尼振荡频率,并记录:程序及结果: >> sys=tf(10,[1,2,10]); >> p=pole(sys) p = -1.0000 + 3.0000i -1.0000 - 3.0000i >> [wn,z]=damp(sys) wn = 3.1623 3.1623 z = 0.3162
0.3162 3)记录实际测取的峰值大小,峰值时间和过渡过程时间,并填表: >> sys=tf(10,[1,2,10]); >> step(sys); >> title('G(s)=10/s^2+2*s+10单位阶跃响应曲线') 4)修改参数,分别实现ξ=1和ξ=2的响应曲线,并记录: ξ=1: 程序:>> zeta=1; >> wn=sqrtm(10) wn = 3.1623 >> sys=tf(10,[1,2*wn*zeta,10]); >> step(sys) >> title('ξ=1响应曲线' ) (图见下页)