第20届中国青少年机器人竞赛机器人创意比赛主题与规则
第二十届中国青少年机器人竞赛
机器人创意比赛主题与规则
1 关于机器人创意比赛
机器人创意比赛是基于每年一度的中国青少年机器人竞赛的主题与规则,组织在校中小学生机器人爱好者,花费6个月左右的时间,在学校、家庭、校外机器人工作室或科技实验室等,以个人或小组的方式,进行机器人的创意、设计、编程与制作,最后提交机器人实体作品参加中国青少年机器人竞赛组委会举办的机器人创意比赛活动。
机器人创意比赛对于培养学生学习与综合运用机器人、电子信息与控制、人工智能和机械工程技术等,激发学生的创新意识和思维潜能,提高综合设计和制作能力极为有益。
2 主题——“协作机器人”
2.1主题简介
本届机器人创意比赛主题定为“协作机器人”,旨在促进青少年了解机器人与人、机器人与机器人等协同、交互工作的基本原理方法与技术应用,并使得同学们在探索机器人知识、技能的过程中树立终身学习的理念。参赛队要大胆发挥想象力与创造力,在围绕本主题的作品设计中,享受智能技术带给你的惊奇与创造美好生活带给你的喜悦,进入与智能机器人和谐共处的时代。
2.2选题范围
协作是个体与个体、群体与群体之间为达到共同目的,彼此相互配合的一种联合行动或方式。按协作中是否存在分工,协作又可分为同质协作(即无分工协作)与非同质协作(即有分工协作)。同学们都知道“团结就是力量”,这就是协作的力量。在机器人的世界里,同样也需要协作。多机器人协作能够使机器人的工作效率更高、智能更强、力量更大;而人与机器人协作,能够有效增强人类的工作能力、避免工作危险、提高工作效率。本主题将多机器人协同、人机协同、人机交互等技术应用于机器人领域,为同学们的选题提供了更自由、更广阔、更具挑战性的发挥空间,创意出各种新颖、有趣、实用的机器人及其应用方式。下面的几个实例,只是向同学们展示“协作机器人”给我们的生产、生活带来的积极影响,希望同学们通过本次创意比赛设计出更多、更新、更有用的机器人,让我们的生活变得更好!
2.3协作机器人实例
人机协作机器人
人机协作机器人,与必须用安全护栏与人隔离的传统工业机器人不同,它可以和人在共同工作空间中协作、互动,一起完成工作。
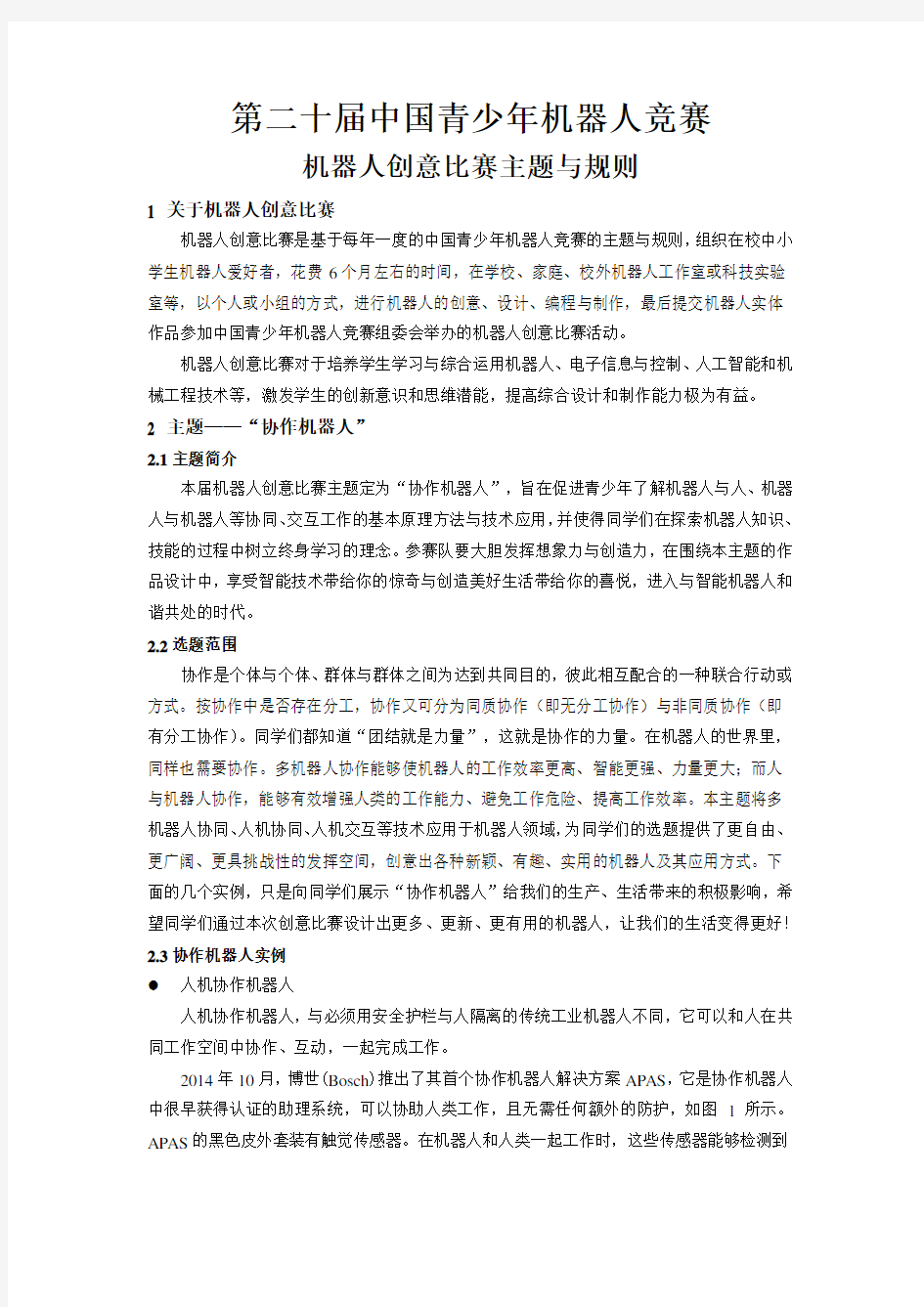
2014年10月,博世(Bosch)推出了其首个协作机器人解决方案APAS,它是协作机器人中很早获得认证的助理系统,可以协助人类工作,且无需任何额外的防护,如图1所示。APAS的黑色皮外套装有触觉传感器。在机器人和人类一起工作时,这些传感器能够检测到
接触产生的非常规力,并给控制器提供一个即时反馈。同时,机器人还有安全距离保护,当检测到人靠得太近时,也会自动降低运行速度;在人离开该区域后,机器人会自动恢复正常速度,相当于隐形的防护网。
图1 协作机器人APAS
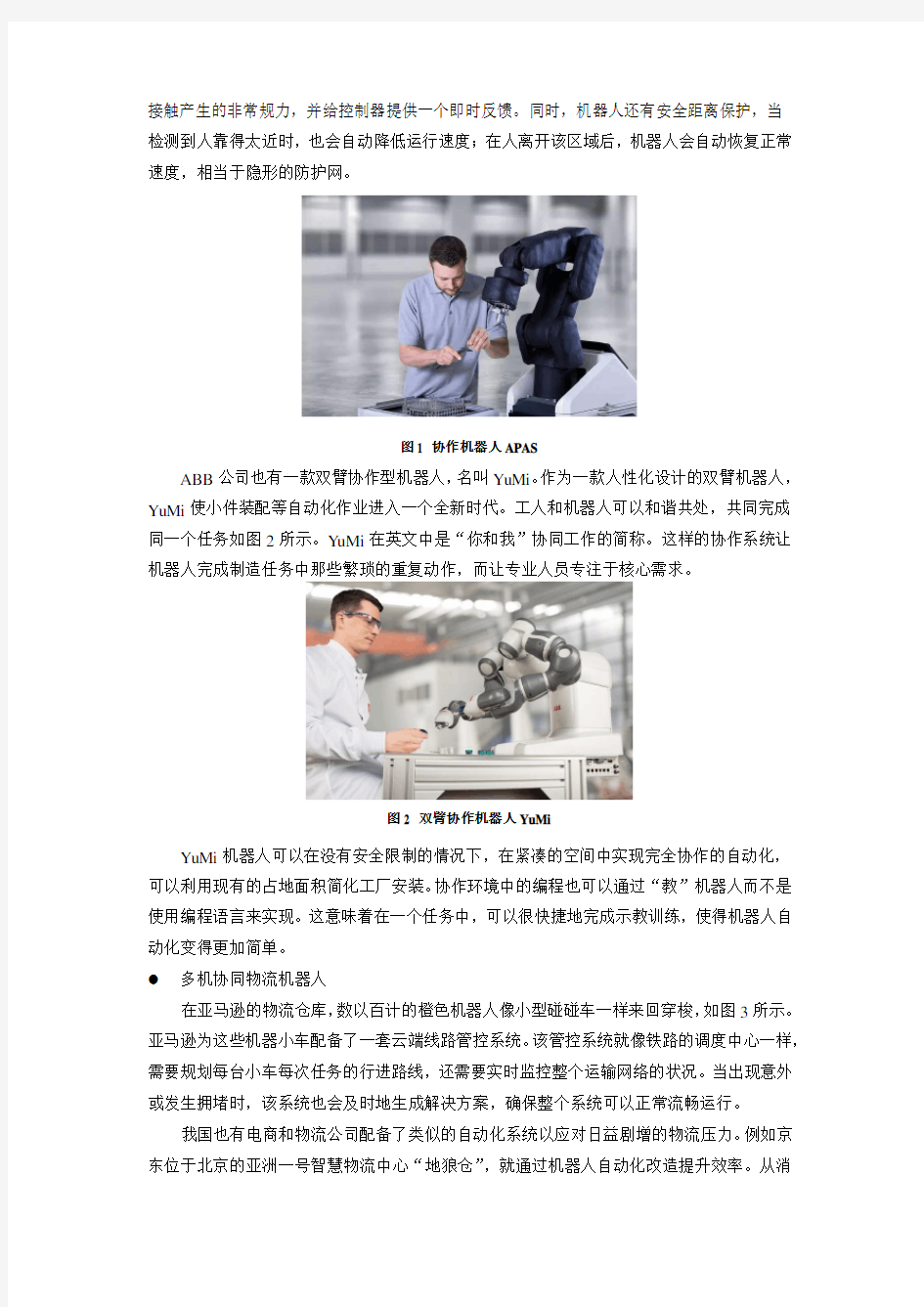
ABB公司也有一款双臂协作型机器人,名叫YuMi。作为一款人性化设计的双臂机器人,YuMi使小件装配等自动化作业进入一个全新时代。工人和机器人可以和谐共处,共同完成同一个任务如图2所示。Y uMi在英文中是“你和我”协同工作的简称。这样的协作系统让机器人完成制造任务中那些繁琐的重复动作,而让专业人员专注于核心需求。
图2 双臂协作机器人YuMi
YuMi机器人可以在没有安全限制的情况下,在紧凑的空间中实现完全协作的自动化,可以利用现有的占地面积简化工厂安装。协作环境中的编程也可以通过“教”机器人而不是使用编程语言来实现。这意味着在一个任务中,可以很快捷地完成示教训练,使得机器人自动化变得更加简单。
多机协同物流机器人
在亚马逊的物流仓库,数以百计的橙色机器人像小型碰碰车一样来回穿梭,如图3所示。亚马逊为这些机器小车配备了一套云端线路管控系统。该管控系统就像铁路的调度中心一样,需要规划每台小车每次任务的行进路线,还需要实时监控整个运输网络的状况。当出现意外或发生拥堵时,该系统也会及时地生成解决方案,确保整个系统可以正常流畅运行。
我国也有电商和物流公司配备了类似的自动化系统以应对日益剧增的物流压力。例如京东位于北京的亚洲一号智慧物流中心“地狼仓”,就通过机器人自动化改造提升效率。从消
费者下单完成的那一刻开始算,不到一个小时,货物就能完成拣货、包装、分拣以及装车等工作。
图3亚马逊物流仓库中的机器人
地空协同安保机器人组合
无人机和地面移动机器人配合,可以扩展机器人对环境感知的能力,提高机器人工作效率,见图4。
图4 地空协同安保机器人
侦察无人机和安全机器人都是新东西,它们各自发展,现在新加坡企业Otsaw Digital 却将二者结合在一起。O-R3是世界第一个地空户外安全机器人,地面上一辆无人驾驶车辆自动行驶,上面是侦察无人机,它用移动系统控制无人机起飞,跟踪入侵者、追踪他们的位置。
O-R3是用机器学习算法驱动的,前进时可以自动避开障碍物,确定异常目标,比如无人注意的包裹。系统还包括了面部、牌照识别技术,当人与车辆出现在不应该出现的地方时,它可以识别;在允许进入的地方,就会忽略人或车辆。
配套无人机装在地面车辆上,它从一个平台上起飞。平台位于车辆尾部,只有必要时才会起飞。如果发现异常行为,系统会将信息发送到控制中心,那里有人监控,如果必要,他们会接管O-R3的控制权。车辆的电池如果电量很少了,它会自动回到充电站充电。
有一些安全工作很简单,O-R3可以完全替代,但是Otsaw Digital澄清说O-R3并不是完全无人控制的系统。经验丰富的人会监控一切,评估机器上记录的警报。
机器人研究者们已不满足于构建只具有行走、灵活操作等能力的个体机器人,还希望它
们能与其它机器人和人类协作,使其具有更智能、强大、高效的能力。青少年朋友们让我们一起挑战吧!
2.4 选题
参赛队应从要完成的任务着手,选择一个人或机器人难以单独完成的任务,设计并搭建一台能与人协作或者与另一台机器人协作共同完成该任务的机器人。
参赛队应明确机器人需要具备的三个根本属性:⑴具有实施操作的本体结构;⑵具有智能和感知能力;⑶具有作业功能。为了人与机器人或机器人与机器人之间的协作,他们之间的交互能力也是不可或缺的。
创意不宜以主题背景编造故事或者情节,这样做反而会弱化机器人的创新点,要着力表现机器人特殊的要素、内涵、结构以及内在蕴含的科学原理。
参赛队员应该在充分理解比赛主题涵义和选题范围的基础上,经过课题研究,确定作品的制作方案后,再进入课题的实施阶段。一定要让自己所遴选的项目在主题和演示内容方面紧扣主题,贴合主题。在此前提下,围绕自己最有心得的,或者最感兴趣的机器人(或机器人系统)形式抒发创意,表达创新。作品可大可小,结构体系不必过于复杂,针对性较强即可。另外,创新点不必贪多,突出一个或两个深入研究即可,避免陷入编排故事、构造情节的误区。
本比赛不提倡同一个作品同时报送多个竞赛项目,也不提倡将往届比赛的获奖作品(尤其是一等奖)没有较大幅度的改进创新再次报送本竞赛。
3 比赛规则
3.1 分组
比赛按小学组、中学组、高中组三个组别进行。参赛队应该在赛前完成参赛作品的制作和搭建,届时携带作品赴现场,比赛的内容为作品展示和交流问辨。
每支参赛队的参赛人数为不多于3名学生和1名指导教师。参赛学生必须是截止到2020年6月底前仍然在校的学生。现场正式布展和评审阶段场馆均封闭,仅允许学生队员在场。
3.2 参赛作品的器材要求
参加竞赛的机器人作品,除不得选用污染环境、有害健康的器材外,原则上不限定器材。器材选用应力求节省成本,且机器人作品的创意、设计、搭建、编程应由学生独立或集体亲身实践和完成,避免比赛的成人化倾向。
3.3 参赛机器人作品应该体现七个要素
⑴机器人创意的出发点应该是出自学生自身调查研究的结果;
⑵符合创意比赛的主题,正确体现机器人的内涵;
⑶在契合主题的前提下,机器人演示的完整性和创意的新颖性;
⑷科学性和一定的研究制作工作量;
⑸研制过程和作品成果均体现出学生的主体性;
⑹在制作机器人的过程就要体现环保意识;
⑺规范的申报材料。
3.4 机器人创意比赛程序
3.4.1申报
比赛通过“中国青少年机器人教育在线网站https://www.360docs.net/doc/e92635803.html,/”(以下简称网站)的平台申报,推行全程电子信息管理,实现申报和评审的无纸化。
机器人创意比赛参赛队应在规定的截止日期,即2020年6月5日24点前通过网站在线提交申报资料,电子化申报材料的内容包括:
⑴机器人创意比赛项目电子申报表1份(纸质申报表另交);
⑵机器人创意比赛项目研制报告1份。该报告的文字与图表(外观图、结构图、原理图等)共计不超过5页。另附作品彩色照片、但数量不超过5幅;
⑶机器人动作演示的视频资料1~3分钟;
⑷项目研发所需材料清单一份;
⑸项目运行的完整程序(不限制程序设计使用的语言)。
是否按时、完整、规范地提供上述材料,将作为申报作品资格审查与项目初评的重要依据。凡未达到合格要求者,将被视为初评不合格,而取消参加全国终评的资格。
3.4.2资格审查与初评
竞赛组委会和专家委员会将根据申报资料对参赛作品进行资格审查与初评。其结果定于2020年6月20日前在网站公示。通过资格审查与初评的作品才被允许进入全国终评阶段。
3.4.3现场布展
⑴获得终评资格的参赛选手要为各自作品制作一块120厘米(高)、90厘米(宽,一律竖用)的作品展示板,供展示使用;
⑵各参赛机器人作品的展台面积不超过2平方米。
3.4.4机器人的组装与调试
在正式展示和问辩前,组委会安排一定时间段供参赛队布展、组装和调试作品。
3.4.5终评
机器人创意比赛的终评包括作品展示、评审小组成员现场问辩。评审小组由竞赛组委会聘请国内机器人学术界的资深专家组成。
终评阶段,在指定的展示时间段内,所有参赛选手均应在展台待命,不得任意缺席。“现场问辩”分为“封场评审”和“封闭答辩”两个环节。
封场评审指在作品展示期的第一天,除参赛学生选手外,其他人均不得进入场区,由评审专家前往各展台逐一评审。其间,每项作品有5分钟的讲解与演示时间,5~10分钟的提问交流时间。
封闭答辩指在作品的展示期,评审专家将随时、随机地通知三个组别一定数量的作品进入指定的封闭答辩室进行答辩。被选取的作品将提前30分钟通知到代表队,队员需准备10钟左右的PPT正式讲解稿,届时应规范着装进入答辩室,按照PPT陈述项目后接受评审专
家10分钟质询。制作封闭问辩PPT的内容应该分为创意来源、创意要点、结构特点、制作过程、演示效果五个部分。陈述中要着重说明创意题目的“自选性”、创作过程的“自主性”,以及完成作品的“自制性”。
要求参赛作品全程展示,不得提前撤展,如果缺席封闭答辩,将被扣分。
终评结果在综合初评、封闭评审和封闭答辩后做出,由评审小组成员依据评分标准(见表1)独立评议后,通过网络上传竞赛计分管理系统生成,组委会将在网上及时发布比赛结果。
4 机器人创意比赛作品的评分标准
机器人创意比赛按照表1所示的六项标准评分。
表1 :机器人创意比赛作品的评分标准
5 奖励
按照高中、初中、小学的三个组别分别评出以下奖项:
一等奖------- 20%,颁发金牌和证书;
二等奖------- 30%,颁发银牌和证书;
三等奖------- 50%,颁发铜牌和证书;
6 其它
6.1关于比赛规则的任何修订,将在中国青少年机器人竞赛网站https://www.360docs.net/doc/e92635803.html,/上发布。
6.2 关于规则的问题可通过该网站的“规则答疑”栏目答疑。
6.3 比赛期间,凡是规则中没有说明的事项由裁判委员会决定。
6.4第二十届中国青少年机器人竞赛裁判委员会对凡是规则中未说明事项,以及有争议事项,均拥有最后解释权和决定权。
附件
关于研究报告的建议
鉴于学生对研究报告的撰写缺乏经验,有时杂乱无章。为了使学生认识到研究报告的重要性,培养学生表述自己所做工作的能力,特提出以下建议:
⑴每份研究报告应包含标题、摘要、关键词、问题的提出、相关工作介绍、作品描述、实验结果与分析、结论、参考文献等几部分。
⑵标题。它是项目的名称,一般是名词性短语。标题要突出作品的目标和/或特色,起到画龙点睛的作用。但也要注意别夸大其辞。例如,作品中明明达不到大数据的规模,一定用一个大数据的修饰语,这样就会恰得其反,画蛇添足,因为科学论文或报告,是非常强调客观真实性的。
⑶摘要。写摘要的目的是提供研究报告的内容梗概,不加评论和补充解释,简明扼要。其基本要素包括研究目的、方法、结果,也就是研究的主要对象和范围,采用的手段和方法,得出的结果和重要的结论。摘要一般采用第三人称。创意项目研究报告的摘要,应重点说明创意的新颖性。
⑷关键词。关键词是直接从项目名称、小标题、正文或摘要里抽取的与研究报告内容密切相关的部分重要词汇。正确选用关键词给文档的储存和检索带来极大的方便。选用的关键词不要太多。
⑸问题的提出。每个创意作品都会有它的思想源泉,这里可以简明平实地介绍你是怎样想到这个创意的。切忌不要篇幅过长、文学化地讲故事,因为研究报告讲求客观性,篇幅过长就会喧宾夺主,后面的作品描述,实验结果与分析才是报告的重点。
⑹相关工作介绍。每个创意都不是横空出世的,往往它们都是建立在一些相关工作的基础上。在分析创意期间,通常需要做一下查新的工作,了解是否已经有过类同的工作,通过对文献的阅读,可以开阔自己的思路,也便于对自己创意作品把握特色。
⑺验证作品描述。机器人作品是对创意设想可行性的验证手段,要说明创意是奇思妙想而不是胡思乱想。这部分是报告的重点,参赛队应清楚详实地描述自己作品的基本构成,功能特色等,要图文并茂,条理清楚。
⑻实验结果与分析。验证作品完成后不进行任何实验是非常可惜的。为了验证创意的可行性,需要设计相关的实验内容,记录实验数据,通过对量化数据的分析,得出相关的实验结论。实验的组数越多,越全面,你的创意作品的可靠性就越高,结论的可信性就越大。
⑼结论。这部分是对整个创意过程所得到的一些结论性论断的扼要总结。
⑽参考文献。你的研究过程肯定受到了很多文献信息的影响,这里列出它们是对前人工作的感谢与致敬。这里包括书籍、论文等。
湘机小学2013机器人创意比赛创意设计(环保小卫士”——智能垃圾桶机器人)
环保小卫士 ——智能垃圾桶机器人 设 计 报 告 作 者:莫棫涵、桂健秦 指导老师:王南霞 作者单位:湘潭市岳塘区湘机小学 第六届湖南省机器人 创新设计大赛参赛作品
一、作者简介: 姓名:桂健秦 性别:男 民族:汉 出生年月:2002年5月14日 就读学校:湖南省湘潭市岳塘区湘机小学 就读班级:五【5】班 性格:有耐心,很细心,做事认真 个人爱好:乒乓球,篮球,电脑,射击类游戏,看书 姓名:莫棫涵 性别:男 民族:汉 出生年月:2002年3月1日 就读学校:湖南省湘潭市岳塘区湘机小学 就读班级:五【5】班 性格:开朗、阳光、自尊心极强 个人爱好:篮球、运动、读书、机器人设计制作
二、作品简介: 现在,大家都在宣传和建设“两型社会”,但我们还是可以看到这样的现象:公共场所垃圾桶的周围经常满是垃圾,有时垃圾桶满了也没能及时清理;垃圾桶有老鼠窜来窜去;夏天的时候,垃圾桶的苍蝇、蚊子特多;经过垃圾桶时臭味难闻;有些人还是没有社会公德,手中的垃圾随便扔到地上或垃圾不入垃圾桶;虽然有分类垃圾桶,人们却很少把垃圾分类入桶…… 同时我们也了解到清洁工人每天在清理垃圾时都很辛苦,于是我们想到研制环保小卫士,这种环保小卫士实际上是一种智能的垃圾桶机器人,他能服务社区, 为社区保洁,充当环何卫士的职能,干最脏、最苦、最累的活,并能提醒人们注意公共卫生,养成好公共环境卫生好习惯,宣传两型环保知识,提高人们生活和居住环境质量。 我们设想我们研制的环保小卫士有脑子,有嘴巴,有眼睛,有手和脚,能自动分类垃圾,并能对垃圾进行简单的处理。 首先,这个垃圾桶是封闭的(但能透气),老鼠、苍蝇不能随便进入垃圾桶,当检测到有废物丢入垃圾时,提醒人们进行分类入桶,然后自动打开垃圾盖,并能再次对垃圾进行二次分类。 其次,这个垃圾桶能进行垃圾处理。对不可回收的垃圾进行粉碎等处理,并可能利用垃圾来发电,为自己提供能源。垃圾桶具有自动清理功能,垃圾满了能自动行走到垃圾场“倒”垃圾,使垃圾桶更干净。 第三,能监测周围的环境情况,显示出环境污染指数。并能对破坏环境的不良行为时能进行提醒,拍照作记录,促使大家养成良好习惯。减轻清洁工人的劳动。
机器人足球比赛规则
机器人足球比赛规则 1.前言 本规则对已经沿用多年的2对2机器人足球比赛规则做了一些修改。目的是强调机器人足球比赛中的技术成份,而不是一味比拼速度和力量。对于本规则肯定会有一个适应过程,但对机器人足球的正常发展是有益的。 2.比赛场地和足球 2.1.机器人足球的矩形比赛场地长2430mm、宽1820mm。球场区长1830mm、宽1220mm,球场四周有宽度为300mm的白色界边,如图1所示。场地周围包括球门后面有高为80mm黑色亚光围栏。 2.2.赛场地面覆盖一层乙烯基场地纸。球场应水平和平整。白色边界包括场地边缘,也应平坦。 图1 比赛场地(mm) 2.3.场地应放置在地毯或毛毡基底上。场地可放在桌上或地板上。 2.4.球门宽度为450mm,深度为80mm。每个球门在距地面140mm处有一横梁。球门内的后面和侧面涂成天蓝色。地面平坦和水平,为白色。球门外侧面应涂有亚光黑色。球门的侧壁延伸到围栏,以防止足球从球门后方滚入。 2.5.场上有两个发球区,图2中用白色表示,但在场地纸上并未标记。它们是绿色区域
和黄色区域与灰色区的两条交接线(如下图白线)。 2.51最近发球点:如下图,如果球从B 区出界或在C 区犯规,最近发球点为作通过出界点或犯规点并与虚线平行的直线,该直线与靠近出界点或犯规点的白线的交点;如球从A 区出界或在罚球区犯规,最近发球点靠近出界点或犯规点的白线端点。 图2 发球区 2.6.参赛队必须根据场馆的照明和磁场条件调整机器人。比赛组织者将尽力保持较低的照度,并使赛场远离磁场(比如地板下的布线和金属物体)。不过仍建议各参赛队应设法让自己的机器人能适应各种照明和磁场干扰情况,并应对场地表面大约5mm 高的轻微起伏。 2.7.比赛采用会发射红外线的直径75~80mm 的电子球。每场开赛前,裁判都要检查足球是否损坏。本届竞赛用球为Wiltronics 制造的MK2红外球,或由日本EK 公司制造的RoboSoccer RCJ-04足球。这两种球都被允许用于比赛。MK2红外球外壳较薄,参赛队必须控制机器人的动力,否则损坏足球后可能会根据规则5.9被取消比赛资格。 3.机器人 3.1.机器人必须是经参赛队员启动后能够自动控制的机器人,禁止使用任何遥控方式操控。每支参赛队可使用不超过两个机器人参赛。比赛中禁止使用备用机器人,即在所有场次比赛使用相同机器人,违者取消比赛资格。 3.2.参加本比赛的机器人限用竞赛组委会指定的教育 机器人套材。只要有可能,也允许以上器材混用。 3.3.机器人必须能纳入内径和高度为220mm 的圆筒 中,重量不得超过2.5kg 。 3.4.机器人带球装置的控球区定义为连接在机器人身 上的任何突出部位形成的内部空间,控球区的深度不得超过 30mm ,如图3所示。 图3 控球区示意图 A A A A B B
中国青少年机器人竞赛规则-全国青少年科技创新活动服务平台
第24届湖北省青少年科技创新大赛机器人竞赛规则 第一章概述 一、竞赛的性质 湖北省青少年科技创新大赛机器人项目以培养青少年的创新意识和实践能力,提高青少年的科学素质为目的,是一项将知识积累、技能培养、探究性学习融为一体,面向广大青少年机器人爱好者的科学普及性活动。 二、组织机构 主办单位:湖北省科协、湖北省教育厅、湖北省科技厅 承办单位:湖北省青少年科技中心 工作网站:湖北省青少年科技创新活动服务平台(https://www.360docs.net/doc/e92635803.html,)。竞赛的有关文件、规则和各类项目申报书均在网站上发布,供各地下载使用。 三、竞赛时间 时间:2008年 4-5月 四、竞赛内容 1、中夏机器人普及赛: ①小学组:机器人接力赛; ②初中组:和平鸽比赛; ③高中组:分辨黑白球比赛; 2、爱乐博机器人特色比赛: ①机器人轨迹赛; ②机器人不编程轨迹赛; 3、机器人提高赛; 4、机器人足球比赛; 5、机器人创意比赛; 6、机器人工程挑战比赛; ①FLL机器人工程挑战比赛; ②VEX机器人工程挑战比赛。 五、竞赛参赛对象及组团方式 凡2009年在校就读的中小学生(包括中专、中技、中师、中职),均可参加本届竞赛。本届竞赛规定的各项目,除机器人特色项目外一律按小学、初中、高中三个组别参赛,不允许跨组别。各代表队由领队、教练各1人及参赛队员组成,参赛队员的组队人数详见各项目细则。 六、奖励 1、竞赛活动优胜选手及组织者由主办单位进行表彰和奖励。 2、大赛接受有关企业和社会机构设立的专项奖励。根据专项奖设立原则,评选出专项奖获奖人员,予以奖励。 3、本届竞赛将从获得机器人基本技能比赛、机器人足球比赛、机器人创意比赛、FLL机器人工程挑战比赛、VEX机器人工程挑战比赛5项竞赛中选拔各组别的优秀代表队,组成湖北省代表团参加中国青少年机器人竞赛。 4、若有个别项目组队数低于10个队,大赛将设表演奖而不设竞赛奖。 第二章基本规则 一、第24届湖北省青少年科技创新大赛机器人项目竞赛的“中夏机器人普及赛”、“爱乐博机器人特色赛”、“机器人提高赛”、“机器人工程挑战比赛”等4项赛事每个代表队比赛两轮,取最佳成绩;“机器人足球比赛”每个代表队抽签分组、采取淘汰赛的方式进行;“机器人创意比赛”采取评委现场问辩评审的方式进行。 二、竞赛器材: 中夏机器人普及赛:“中夏”教育机器人套装。 爱乐博机器人特色赛:“爱乐博”教育机器人套装。
RIC机器人创新挑战赛主题与规则
RIC机器人创新挑战赛主題与规则 ――智能驾驶1.RIC机器人创新挑战赛简介 RIC(Robot Innovation Challenge)机器人创新挑战赛是一项青少年机器人比赛项目。要求参加比赛的代表队自行设计、制作机器人并进行程式设计。参赛的机器人可在特定的竞赛场地上,按照一定的规则进行比赛。在中国青少年机器人竞赛中设置RIC机器人创新挑战赛的目的是通过电脑资讯及科学原理的融合运用,启发参赛者的科技运用及创意,并以机器人设计的竞赛活动,达到推动创新科学教育的目的,激发我国青少年对机器人技术的兴趣。 2.竞赛主題 本届RIC挑战赛的主题为“智能驾驶”。 智能驾驶与无人驾驶是不同概念,智能驾驶更为宽泛。它指的是机器帮助人进行驾驶,以及在特殊情况下完全取代人驾驶的技术。 智能驾驶的时代已经来到。比如说,很多车有自动刹车装置,其技术原理非常简单,就是在汽车前部装上雷达和红外线探头,当探知前方有异物或者行人时,会自动帮助驾驶员刹车。另一种技术与此非常类似,即在路况稳定的高速公路上实现自适应性巡航,也就是与前车保持一定距离,前车加速时本车也加速,前车减速时本车也减速。这种智能驾驶可以在极大程度上减少交通事故,从而减少保险公司损失。 智能驾驶作为战略性新兴产业的重要组成部分,是由互联网时代到人工智能时代过程中,出现的第一个精彩乐章,也是世界新一轮经济与科技发展的战略制高点之一。发展智能驾驶,对于促进国家科技、经济、社会、生活、安全及综合国力有着重大的意义。 本次,我们的学生将设计制作智能驾驶机器人,让其代替我们行驶在赛图上,完成相应的任务。 3. 比赛场地与环境 3.1 场地 场地图(不含黑边)的尺寸为长2500mm宽1500mm。 图为训练场地示意图。实际比赛场地可能略有不同。
XXXX年第十一届全国青少年机器人竞赛准入企业设备分析
2011年中国青少年机器人竞赛准入设备优缺点分析 姓名:刘龙 学号:1281407008 专业:2007级教育技术学 学校:东北师范大学 学院:计算机科学与信息技术学院
第一部分:中国青少年机器人竞赛简介 (一)目的:全国青少年电脑机人竞赛是为贯彻落实《2001-2005年中国青少年科学技术及活动指导纲要》,培养青少年的实践能力和创新精神,把现代化的科学技术引入中小学青少年科技教育活动,激发广大青少年学习、探索、掌握和运用电子信息技术的兴趣,提高青少年的科学素质。 (二)主办单位:中国科协青少年工作部、中国儿童中心、霍英东基金会 (三)举办届数:目前已经举办了10届 (四)历届简介: 第1届 主办单位:由中国科协青少部、霍英东基金会、全国妇联儿童中心主办 时间地点:2001年,广州南沙科学技术馆 参加人员:10多个省市200多名学生参加 竞赛项目:机器人单项竞技项目和机器人工程设计比赛 准入厂家:西觅亚科技发展有限公司 第2届 主办单位:由中国科协青少部、霍英东基金会、全国妇联儿童中心主办 时间地点:2002年,广州南沙科学技术馆 参加人员:近20个省市区的500多名学生参加 竞赛项目:机器人单项竞技项目和机器人工程设计比赛。 准入厂家:西觅亚公司 第3届 主办单位:中国科协青少部主办 时间地点:2003年,河南郑州 参加人员:26个省市区的700多名学生参加 竞赛项目:电脑机器人常规竞赛、机器人创意设计与动手做比赛和机器人足球赛 准入厂家:西觅亚公司 第4届: 主办单位:中国科协主办, 时间地点:2004年1月30日至2月3日,广西南宁 参加人员:28个省市及港澳地区的650支队伍1000多名学生参加 竞赛项目:机器人常规竞赛、机器人创意设计与动手做比赛、机器人足球赛和FLL机器人工程课题挑战 准入厂家:西觅亚公司、中鸣科技数码有限公司 *从第5届起,竞赛更名为“中国青少年机器人竞赛” 第5届: 主办单位:中国科协主办
2019年中国电教馆电脑制作机器人足球竞赛规则
附件2 机器人足球竞赛规则 该规则适用于1对1和2对2对抗赛,不同之处有注明。小学组为1对1竞赛,初中组和高中组为2对2竞赛。 一、竞赛场地及设备标准 1.场地(内侧):长183cm,宽122cm,高14cm。四角有防死球的等腰直角三角柱,直角边长8cm。 2.墙壁:场地边界有墙壁(包括球门区)。墙壁高为14cm,墙壁内侧为黑色(哑光)。 3.球门:球门位于场地底线的中间,宽60cm,深12cm,高14cm。球门上方有2cm宽的横梁,在搭建和编程时,应保证机器人不能进入球门横梁内侧。可以使用球门上方的横梁以防止机器人进入球门内。球门内部,包括地面、墙壁和横梁可以涂色(两边球门分别为黄色和蓝色)。 4.地面:地面是草绿色光滑硬质地面,可以是广告喷绘膜或者油漆板材等。 5.开球点:球场中央点。 6.坠球点:场地中定义了五个坠球点。一个在场地正中;其余四个坠球点位于四个墙角附近,沿着赛场的长边分布,是在两边球门内侧联线方向上,靠近场地中部且距离门柱45cm远的那一点。场地中的坠球点将用黑点标示。 7.中圈:场地上将标出中圈,以场地中心为圆心,直径60cm,由黑色窄圈标示。在开球时裁判可以中圈为依据。 8.禁区:在每个球门前有个宽30cm、长80cm的禁区。禁区由宽1cm的白线标示,白线也是禁区的一部分。当机器人所有部分都在禁区内时,才视作“机器人在禁区内”。 9.照明:为稳定的室内照明灯光。 10.机器人:机器人体积(包括静止和比赛状态)正常置放时垂直投影面积必须在直径22cm(含)范围之内,限高22cm(含)以下,限重1.1kg(含)以下,机器人的启
动、停止开关应设于机器人上方。 根据机器人电源连接方式不同(串联或并联),一台机器人使用的所有电源的总输出不得超过9V(即2串锂聚合物电池或6节干电池),不得使用升压、稳压装置。每台机器人的电源都必须有一个接口,以便测量电压,除非该机器人的电源从外观和连接方式能明显看出它的电压。单场比赛期间不允许充电或更换电池。 机器人不允许使用发射管发射红外光,可以使用红外测距传感器,但不能用于干扰其他机器人,各类测距传感器的数量不能超过4个。不允许在机器人表面使用能够反射红外光的材料。如果给机器人涂色,则必须涂成哑光的。选手应采取措施避免非主观的可见光及红外光源影响机器人的行动。 机器人只允许采用双驱动轮配置,即由两个电机分别独立控制一个着地的轮胎,可以安装辅助平衡的随动轮或万向球,随动轮或万向球与两个驱动轮必须成“十”字分布或“品”字分布,不能安装成两列形式。机器人不能在己方球门前只作左右移动,而应该能做出直接迎向足球的动作。 机器人(形成三面包围球体的)踢球装置的控球深度最大为1cm,以突出的两点之间成一水平连线中任一点且垂直到机器人边沿的直线距离计算。 机器人如果有盘球和弹射装置,可使用相对应的电机进行操控,在盘球装置可正常运转的情况下,机器人(形成三面包围球体的)踢球装置处的控球深度最大可放宽至为3cm。 11.足球:使用直径(74±5)mm的匀称电子球,该球会发出红外调制光,1200Hz阶梯波调制(载波40kHz),重95±5g(不含电池)。 二、名词定义解释 1.出界球:足球(越过墙壁)被机器人踢出球场外。 2.进球:当球完全进入球门区域或碰到球门后壁反弹,
机器人足球赛简介
机器人足球赛简介 RoboCup是一个通过提供足球比赛这样一个标准问题来促进人工智能、机器人以及相关领域的研究而建立的国际组织。 1997年,是人工智能和智能机器人研究史上重要的一年,同年5月,IBM的深蓝机器人击败了人类国际象棋冠军,人工智能领域四十多年的挑战终于成为现实;7月4日,NASA 的“火星探路者”飞行器及其配置的自主移动机器人系统,Sojourner,成功地在火星表面登陆;也就在这一年,首届RoboCup比赛及会议在日本的名古屋举行,为实现机器人足球队击败人类足球世界冠军的梦想迈出了坚实的第一步。 加拿大不列颠哥伦比亚大学的教授Alan Mackworth在1992年的论文《On Seeing Robots》(新加坡世界科学出版社:《计算机视觉:系统、理论与应用》)中提出训练机器人进行足球比赛的设想。1992年10月,在日本东京举行的《关于人工智能领域重大挑战的研讨会》上,与会的研究人员对制造和训练机器人进行足球比赛以促进相关领域研究进行了探讨。1996年,RoboCup国际联合会成立,并在日本举行了表演赛,以后每年举办一届。RoboCup 的使命是促进分布式人工智能与智能机器人技术的研究与教育。通过提供一个标准任务,使得研究人员利用各种技术,获得更好的解决方案,从而有效促进相关领域的发展。他的最终目标是经过五十年左右的研究,使机器人足球队能战胜人类足球冠军队。 RoboCup机器人足球的研究融入了计算机、自动控制、传感与感知融合、无线通讯、精密机械和仿生材料等众多学科的前沿研究与综合集成,其研究领域包括智能机器人系统,多智能体系统,实时模式识别与行为系统,智能体结构设计,实时规划和推理,基于网络的三维图形交互,传感器技术。其技术特点有:动态实时系统、分布式合作与协调、带噪声的,非全信息的环境模型、非符号化的环境信息、受限的通讯带宽等,它的设计主要分成以下模块:机械系统、电子系统、视觉系统、决策系统和通讯系统和车载系统等系统的设计。 l、RoboCup足球机器人仿真组(2D、3D) 仿真组比赛是RoboCup 的组成部分。RoboCup 仿真比赛是一个能为多智能体系统和模拟智能进行研究与教育的工具。比赛是在一个标准的计算机环境中进行的,提供了一个完全分布式控制,实时异步多智能体环境。通过这个平台,测试各种理论,算法和Agent 体系结构。在实时异步,有噪声的对抗环境中,研究多智能体的合作对抗问题。当然,仿真组的比赛使用的机器人并非是真的机器人。一个机器人是Agent, 拥有自己的大脑,是一个独立的"主体"。而一个球队实际是程序组成的。服务器的工作就是计算并更新球场上所有物体的位置和运动,发送视觉和听觉信息给球员,接收球员的命令。
RIC机器人创新挑战赛主题与规则
机器人创新挑战赛主題与规则 ――全民健身1.机器人创新挑战赛简介 ( )机器人创新挑战赛是一项青少年机器人比赛项目。要求参加比赛的代表队自行设计、制作机器人并进行程式设计。参赛的机器人可在特定的竞赛场地上,按照一定的规则进行比赛。在中国青少年机器人竞赛中设置机器人创新挑战赛的目的是通过信息技术及科学原理的融合运用,启发参赛者的科技运用及创意,并以机器人设计的竞赛活动,达到推动创新科学教育的目的,激发我国青少年对机器人技术的兴趣。 2.竞赛主題 本届挑战赛的主题为“全民健身”。 全民健身是指全国人民,不分男女老少,全体人民增强力量,柔韧性,增加耐力,提高协调,控制身体各部分的能力,从而使人民身体强健。 全民健身旨在全面提高国民体质和健康水平,以青少年和儿童为重点,倡导全民做到每天参加一次以上的体育健身活动,学会两种以上健身方法,每年进行一次体质测定。为纪念北京奥运会成功举办,国务院批准从年起,将每年月日设置为“全民健身日”。 伴随着全民健身活动的蓬勃开展,人们的生活观念发生巨大变化。在一些大中城市,为健康而消费成为新时代提高生活质量的一种时尚。部分新兴体育项目,如攀岩、马术、蹦极、保龄球、滑板、女子拳击、沙弧球、跆拳道、高尔夫球等运动,尤其受到年轻人的青睐。 . 比赛场地与环境 场地 场地图(不含黑边)的尺寸为长宽。 图为训练场地示意图。实际比赛场地可能略有不同。
参赛队可以把待命区内当前不动或机器人不用的物品放到待命区外,只要这个动作不具有任何策略性。 如因其它原因而非机器人的动作使场地中的模型断裂、失效、移动或被启动,如果可能,裁判员应尽快将它恢复。 起始区与终止区 场地中有一块起始区(区域)和一块终止区(区域)。起始区是机器人准备、启动的地方,终止区是机器人最终停止的地方。起始区为:*。 赛场环境 机器人比赛场地环境为冷光源、低照度、无磁场干扰,但由于一般赛场环境的不确定因素较多,例如,场地图下面有纹路和不平整;场地图本身有皱褶;尺寸有误差;光照条件有变化等等。参赛队在设计机器人时应考虑各种应对措施。. 机器人和器材 本节提供设计和构建机器人的原则和使用器材的要求。参赛前,所有机器人必须通过检查。竞赛中号遥控机器人首先启动,号机器人启动后,通过无线手柄遥控的方式去启动号机器人,号机器人应让其自动运行完成规定任务,参赛队员不得再对号机器人进行干预。不允许使用智能循迹模块。 每个参赛队只能使用两个机器人完成所有比赛项目。赛场上只能有两个控制器,不能再把其它控制器带到比赛区,即使该控制器只是用于配重或装饰或放在场外的盒子里。 机器人最多可以使用个传感器,它们可以是触碰传感器、光电传感器、颜色传感
机器人足球比赛规则
中国青少年机器人竞赛 机器人足球比赛规则 1 前言 2对2机器人足球比赛规则经过几次调整,基本达到强调机器人足球比赛中的技术而不是一味比拼速度和力量的目的,加强了对参赛学生能力的考核,对机器人足球的正常发展是有益的。为了更方便训练和比赛,再次对规则进行修订。 2 比赛场地和足球 2.1 机器人足球赛台的球场区长1220mm、宽1830mm,球场四周有宽度为220mm的白色边界区。边界区四周有宽80mm的坡面,四周为高150mm、厚18mm的档板。边界区及坡面均刷白色亚光漆,档板刷黑色亚光漆。赛台尺寸如图1所示。赛台用木工板制成。 2.2 赛台中央的木质底板上覆盖一层喷绘的背胶场地纸。绿色球场及白色边界区应水平和平整。 图1 比赛场地(mm) 2.3 赛台应放置在约600mm高的架子上。
2.4 球门内宽为450mm,深度为80mm。每个球门在距地面140mm处有一横梁。球门内有高度为80mm的后壁。球门内侧涂成天蓝色,地面为白色。球门外侧面应涂成亚光黑色。球门用厚度不超过12mm的木板制成。 2.5 场上有六个发球点和一个开球点,图2中用白点表示,但在场地纸上并未标记。 图2 发球点、开球点和罚球区 2.6 参赛队必须根据场馆的照明和磁场条件调整机器人。比赛组织者将尽力保持较低的照度,并使赛场远离磁场(比如,地板下的布线和金属物体)。但是,建议各参赛队应设法让自己的机器人能适应各种照明和磁场干扰情况,并能应对场地表面大约5mm高的轻微起伏。 2.7 比赛采用能发射红外线的直径70~75mm的电子球。每场开赛前,裁判都要检查足球是否损坏。本届竞赛用球为日本EK公司制造的RoboSoccer RCJ-05足球,使用抗于扰力较强的调制模式。参赛队必须控制机器人的动力,否则,损坏足球后可能会根据规则5.7.2和6.7被罚出场或取消比赛资格。 3 机器人 3.1 机器人必须是经参赛队员启动后能够自动运行的机器人,禁止使用任何遥控方式。为了策略或备份的需要,每支参赛队可携带三台机器人参赛,但在同一场比赛中只能使用两台机器人且不能更换。 3.2 参加本届比赛的机器人限用竞赛组委会指定的厂家的机器人套材。只要有可能,也允许以上器材混用,允许自制机器人。
RoboCup中型组机器人比赛规则(MSLR).
RoboCup中型组机器人比赛规则(MSLR) 陈卫东叶道年张小冰等编译 上海交通大学自动化研究所 目录 第一章RoboCup比赛项目 (3) 1.1国际规则项目 (3) 1.22Vs2项目 (3) 第二章RoboCup国际规则 (4) ●规则1 -比赛场地要求 (4) ——规则1.1 尺寸 (4) ——规则1.2 场地标识 (5) ——规则1.3 球门区 (5) ——规则1.4 罚球区 (5) ——规则1.5 旗杆 (6) ——规则1.6 角弧 (6) ——规则1.7 球门 (6) ——规则1.8 安全 (7) ●规则2 -比赛所用球 (8) ——规则2.1 质量和尺寸 (8) ——规则2.2 受损球的替换 (8) ●规则3 -比赛队员装备 (9) ——规则3.1 安全性 (9) ——规则3.2 基本装备 (9) ——规则3.3 守门员 (11) ——规则3.4 犯规和制裁 (11) ——规则3.5 重新比赛 (11) ●规则4 -裁判及助理裁判 (12) ——规则4.1 裁判之权威 (12) ——规则4.2 权力与职责 (12) ——规则4.3 助理裁判 (12) ——规则4.4 裁判判决 (12) ●规则5 -比赛时间 (13) ——规则5.1 半场 (13) ——规则5.1 中场休息 (13) ——规则5.2 补时 (13) ——规则5.3 罚球 (13) ——规则5.3 加时 (13)
——规则5.4 中途终止之比赛 (13) ●规则6 -比赛开始与重新开始 (14) ——规则6.1 开球 (14) ——规则6.2 开球过程 (14) ——规则6.3 开球的犯规及措施 (14) ●规则7 -比赛的进行与暂停 (15) ——规则7.1球赛暂停 (15) ——规则7.2 球赛进行 (15) ●规则8 -比赛的计分 (16) ——规则8.1 进球得分 (16) ——规则8.2 比赛胜利 (16) ——规则8.3 竞赛规则 (16) ●规则9 -犯规行为 (17) ——规则9.1 停球与持球 (17) ——规则9.2 踢球与运球 (17) ——规则9.3 犯规及其犯规后的处罚 (18) ●规则10 -任意球与罚球点及点球 (20) ——规则 10.1 任意球 (20) ——规则10.2 任意球的位置 (20) ——规则10.3 任意球犯规/制裁 (20) ——规则10.4 罚球 (21) ——规则10.5 球出边界的处理 (22) ——规则10.6 球门发球 (22) ●规则11- 上场队员的人数 (23) 第三章RoboCup 2Vs2项目规则 (24) 3.1 2Vs2比赛基本规则 (24) 3.2 2Vs2比赛其它规则 (24)
第十七届中国青少年机器人竞赛暨全国中小学电脑制作活动
第十七届中国青少年机器人竞赛暨全国中小学电脑制作活动(江苏赛区)规则补充说明 (2017年4月13日) 根据中国青少年机器人竞赛官网(https://www.360docs.net/doc/e92635803.html,)关于WER工程创新赛、FLL机器人挑战赛、机器人综合技能竞赛最新的规则答疑,本省规则根据实际情况做以下补充说明,省赛现场将会以该补充说明为参照依据执行。 WER工程创新赛规则补充说明 4.1穿越时空 二层机器需要在完成穿越任务后才可以开始二层的任务,一层机器人与二层机器人只有在完成穿越时空任务后才可以同时开始完成任务,两台机器人在比赛过程中,不可以由参赛队员手动在两个基地内出发完成任务。 4.3采煤和4.4运煤 任务4.3和4.4的满分是115分。任务4.3.3与4.4.3两个任务只能得到其中一个任务的分,也就是两个任务可以二选一,也可以同时完成,但是这两个任务不管选择哪种完成方式,最终最高得分为30分。 4.5开采铁矿与4.7冶炼金属 可以不进行4.5.2中的任务,直接完成4.7.2,记60分,也可以先完成4.5.2(40分),再完成4.7.2(20分)。 4.6开采铜矿 4.6.2机器人将模型上的钢珠向南推落,将围栏的矿山门打开至过黑线位置(看最终状态),得40分。 4.8改进蒸汽机 改进蒸汽机的任务模型图按规则中图8 4.12资源再利用 在资源再利用任务中,将仓库中3个可利用资源(立方体)带回基地后,不可以自由将三个立方体拼接在一起。
FLL机器人挑战赛规则补充说明 (1)运送鲨鱼 鲨鱼必须放在水族箱内,即鲨鱼必须直接并且只与水族箱内的软橡胶部件接触。 (2) 交换动物 1、交换任务的场地物品东西方向在红线之间,南北方向取决于赛台边框厚度。两张赛台紧贴放置在一起后,令该场地道具居中放置。 2、交换动物时,转盘必须完整旋转180度才算作完成任务。 (3) 仿生 1、黑色的三角支架算不算“墙”的一部分。 2、如果壁虎挂在机器人上,同时机器人挂在仿生墙上,最终只有机器人挂在墙上的32分,而壁虎的分数是没有的。 (4) 放归熊猫 熊猫园模型打开后两块底板间没有任何缝隙,则算完全打开;当有一点缝隙时,则用手推可动部分使其完全打开,手离开模型后如果两块底板间没有任何缝隙,说明任务没有完成,手离开模型后如果两块底板自动恢复成和刚才有相同大小的一点缝隙的状态,则算作任务完成。 (5) 养蜂取蜜 要求蜜蜂必须直接接触蜂房顶部后蜜蜂释放。 (6) 收集粪便 机器人在基地外机器人同时只能控制一个盘形粪便模型。如果同时携带,那么所携带的粪便模型不可再使用。
第十三届中国青少年机器人竞赛机器人创意比赛主题与规则
第十三届中国青少年机器人竞赛 机器人创意比赛主题与规则 1 关于机器人创意比赛 机器人创意比赛是基于每年一度的中国青少年机器人竞赛的主题与规则,组织在校中小学生机器人爱好者,花费6个月左右的时间,在课题导师或教练员的指导下,在学校、家庭、校外机器人工作室或科技实验室里,以个人或小组的方式,进行智能机器人的创意、设计、编程与制作,最后以具体的机器人创意作品的形式参加中国青少年机器人竞赛组委会举办的机器人创意比赛活动。 机器人创意比赛对于培养学生学习与综合运用机器人技术、电子信息技术、工程技术,激发创新思维潜能,提高综合设计和制作的能力极为有益。 2 主题——“社区志愿者” 2.1主题简介 “社区志愿者”是一个拟人化的题目。从社会的角色看,题目的主人公是志愿者;从科学的属性看,它们应该归入机器人,更具体些,归入服务机器人的范畴。追溯近代机器人的足迹,从上世纪五十年代算起,大约也有半个多世纪了。起初,机器人主要活跃在产业领域,例如人们熟知的汽车、家电、工程机械、物流、农林业、石化等,称之为产业机器人,是第一大板块。到了世纪之交,服务机器人异军突起,它们深入社会社区生活的各个方面,如清洁、清洗、保安、消防、救援、医疗、监护、康复、益智、娱乐、幼教,智能家居等等,正在为人类描绘新生活的绚丽图景,从而成为机器人产业的后起之秀,第二大板块。 服务机器人属于一种半自主或全自主作业的机器人,完成为人类群体或个体服务的诸多功能,但是一般不参与和国民经济产业部门有关的各种生产活动。在2007年第一期《科学美国人》上,比尔?盖茨发表了一篇题为“家家都有机器人”的文章。他向世界预言:机器人是继个人计算机之后的下一个热门领域。机器人即将重复个人计算机是崛起之路,成为人们
1:机器人足球竞赛规则
该规则适用于全国活动决赛中2对2和1对1对抗赛,不同之处有注明。小学组为1对1竞赛,初中组和高中组为2对2竞赛。 一、竞赛场地及设备标准 1.场地(内侧):长183cm,宽122cm,高14cm。四角有防死球的等腰直角三角柱,直角边长8cm。 2.墙壁:场地边界有墙壁(包括球门区)。墙壁高为14cm,墙壁内侧为黑色(哑光)。 3.球门:球门位于场地底线的中间,宽60cm,深12cm,高14cm。球门上方有2cm宽的横梁,在搭建和编程时,应保证机器人不能进入球门横梁内侧。可以使用球门上方的横梁以防止机器人进入球门内。球门内部,包括地面、墙壁和横梁可以涂色(两边球门分别为黄色和蓝色)。 4.地面:地面是草绿色光滑硬质地面,可以是广告喷绘膜或者油漆板材等。 5.开球点:球场中央点。 6.坠球点:场地中定义了五个坠球点。一个在场地正中;其余四个坠球点位于四个墙角附近,沿着赛场的长边分布,是在两边球门内侧联线方向上,靠近场地中部且距离门柱45cm远的那一点。场地中的坠球点将用黑点标示。 7.中圈:场地上将标出中圈,以场地中心为圆心,直径60cm,由黑色窄圈标示。在开球时裁判可以中圈为依据。 8.禁区:在每个球门前有个宽30cm、长80cm的禁区。禁区由宽1cm的白线标示,白线也是禁区的一部分。当机器人所有部分都在禁区内时,才视作“机器人在禁区内”。 9.照明:为稳定的室内照明灯光。 10.机器人:机器人体积(包括静止和比赛状态)正常置放时垂直投影面积必须在直径22cm(含)范围之内,限高
22cm(含)以下,限重1.1kg(含)以下,机器人的启动、停止开关应设于机器人上方。 根据机器人电源连接方式不同(串联或并联),一台机器人使用的所有电源的总输出不得超过9V(即2串锂聚合物电池或6节干电池),不得使用升压、稳压装置。每台机器人的电源都必须有一个接口,以便测量电压,除非该机器人的电源从外观和连接方式能明显看出它的电压。单场比赛期间不允许充电或更换电池。 机器人不允许使用发射管发射红外光,可以使用红外测距传感器,但不能用于干扰其他机器人,各类测距传感器的数量不能超过4个。不允许在机器人表面使用能够反射红外光的材料。如果给机器人涂色,则必须涂成哑光的。选手应采取措施避免非主观的可见光及红外光源影响机器人的行动。 机器人只允许采用双驱动轮配置,即由两个电机分别独立控制一个着地的轮胎,可以安装辅助平衡的随动轮或万向球,随动轮或万向球与两个驱动轮必须成“十”字分布或“品”字分布,不能安装成两列形式。机器人不能在己方球门前只作左右移动,而应该能做出直接迎向足球的动作。 机器人(形成三面包围球体的)踢球装置的控球深度最大为1cm,以突出的两点之间成一水平连线中任一点且垂直到机器人边沿的直线距离计算。 机器人如果有盘球和弹射装置,可使用相对应的电机进行操控,在盘球装置可正常运转的情况下,机器人(形成三面包围球体的)踢球装置处的控球深度最大可放宽至为3cm。 11.足球:使用直径(74±5)mm的匀称电子球,该球会发出红外调制光,1200Hz阶梯波调制(载波40kHz),重95±5g(不含电池)。 二、名词定义解释 1.出界球:足球(越过墙壁)被机器人踢出球场外。 2.进球:当球完全进入球门区域或碰到球门后壁反弹,
918346-WER2020竞赛-RIC机器人创新挑战赛—“勇攀高峰“竞赛规则-001
RIC机器人创新挑战赛规则 ——勇攀高峰 一、RIC机器人创新挑战赛简介 RIC(Robot Innovation Challenge)机器人创新挑战赛是一项青少年机器人比赛项目。要求参加比赛的代表队自行设计、制作机器人并进行程序设计。参赛的机器人可在特定的竞赛场地上,按照一定的规则进行比赛。在中小学机器人竞赛中设置RIC机器人创新挑战赛的目的是通过电脑资讯及科学原理的融合运用,启发参赛者的科技运用及创意,并以机器人设计的竞赛活动,达到推动创新科学教育的目的,激发我国青少年对机器人技术的兴趣。 二、竞赛主题为“勇攀高峰” 本届机器人创新挑战赛的主题为“勇攀高峰”。 三、.参赛范围 本次比赛分小学组、初中组、高中组。 四、竞赛主题与规则 1 竞赛简介 1.1每支队伍由两名参赛选手组成,他们需要自行拼装机器人、编写机器人程序、调试和操作机器人。机器人从下层基地出发,爬上长 100cm 的斜坡,在上层完成分辨、装配、部署、凯旋等任务。 2 竞赛场地和环境 上层场地高度为65CM,坡度最低30度
图1为比赛场地示意图 2.1 下层基地 30cm×30cm;上层高度为65cm,内尺寸 91cm*91cm,边框高 5cm;斜坡宽 30cm,长 100cm,斜坡最低30度。 2.2 道具:圆环 2 个(直径7cm、厚1cm)、彩色圆柱 3 个(底面直径4cm、高4cm)、圆木球1个(直径4cm)、小圆环1个(直径4cm,厚0.6cm)、木八角2个(直径3cm)。 2.3 竞赛场地以现场公布为准。 3 机器人规格 3.1 机器人的长和宽均不能超过 25cm,高度不限。控制器 1 个,电机不超过 4个,传感器不超过5个,不允许采用集成类循迹卡,电池电压不超过9V。 3.2 机器人必须设计成只用一次操作(如按一个按钮或拨一个开关)就能启动。 4 任务要求: 4.1 登顶:机器人从下层基地攀爬到上层基地。 4.2 凯旋:机器人在上层基地内旋转一圈以上并播放音乐2秒。 4.3 部署:机器人从下层基地携带 1-2 个八角木块,部署至上层的任务区。(小学组1个,初中组和高中组2个,小学组任务区位置赛前公布) 4.4 辨色:将彩色木柱移到颜色匹配的圆形区域(木柱竖直且有部分压住匹配的色块区域即可得分)。各木柱初始位置由参赛队员将机器人在基地摆放好后掷骰子确定,木柱颜色以现场公布为准,可能是红、黄、蓝、绿四种颜色中的两种(下图中的木柱颜色仅为规则示例)。木柱数量:小学组1个、初中组2个、高中组3个。 4.5 装配:将二层场地上的7cm 圆环装配至左上角圆球上,圆球完全进入圆环内,圆环初始位置在上层黑色十字交叉点或轨迹线上,具体位置在赛前公布。(圆环小学组1个,初中、高中组2个)
第十八届中国青少年机器人竞赛机器人创意比赛主题与规则
第十八届中国青少年机器人竞赛 机器人创意比赛主题与规则 1关于机器人创意比赛 机器人创意比赛是基于每年一度的中国青少年机器人竞赛的主题与规则,组织在校中小学生机器人爱好者,花费6 个月左右的时间,在课题导师或教练员的指导下,在学校、家庭、校外机器人工作室或科技实验室,以个人或小组的方式,进行机器人的创意、设计、编程与制作,最后提交机器人实体作品参加中国青少年机器人竞赛组委会举办的机器人创意比赛活动。 机器人创意比赛对于培养学生学习与综合运用机器人技术、电子信息技术、工程技术,激发创新思维潜能,提高综合设计和制作的能力,培养学生开展科学研究基本素质极为有益。 2主题 2.1主题简介 本届机器人创意比赛主题选定为“家庭服务机器人”,旨在促进青少年了解机器人技术在帮助人类家庭生活方面的作用,并使得同学们在探索机器人知识、技能的过程中树立终身学习的理念。 2.2示例 “家庭服务机器人”的选题相当宽泛,可谓多姿多彩,很适合作为中小学生机器人创意的主题。下面的三个机器人的创意仅仅是为了抛砖引玉,实际应用的机器人远不止这些。 送餐机器人 根据室内房间面积和楼层高度,来安装机器人视觉能识别的航标(此航标安装精度要求很高)。设定餐桌位置及转弯位置,由此形成机器人可识别的电子地图。根据此地图机器人形成自动记忆导航并沿着航标指引方向准确无误地到达餐桌完成送餐任务和返回原点!由于机器人的自动记忆导航功能、视觉校正功能,后台调度控制系统可调度多台机器人同时运行,任务优先,柔性化更好,路径最短,效率更高!语音报菜名及障碍物语音提示内容:可自行录制方言或特色语言,方便添加更改。
图1 送餐机器人 ●烹饪机器人 图2 烹饪机器人 在上海世博会的企业联合馆曾展出一种厨师机器人,它头戴厨师帽名叫“爱可”,这个厨师机器人高约2m,宽1.8m。拉开“爱可”肚子上的拉门,里面有特制的烹调设备,有锅,有自动喷油,喷水和搅拌设备,与之相连接的是一个智能化触摸屏,上面是系统控制界面,根据工作人员事先设定好的特级厨师菜谱,“爱可”一共可以独立烹调24 种中华美食。只要按照程序“下单”,头戴专业厨师帽的机器人便会像模像样地开始准备:将早以“定量”好的主料、配料和调料都放在一个专用盒子里;然后又将它们放入炒锅中,放上油、水,炒锅开始旋转,将食材充分搅拌,然后点火,炒锅不停翻转,就像人炒菜一样,大约三分钟后,一盘佳肴就做呈现在顾客面前。 烹饪机器人的市场前景还是非常的巨大的,随着人们生活水平的提高,再加上社会节奏的加快,为了给自己拥有更多的时间和空间,在中国,厨师机器人将会进入千家万户。 ●草坪修剪机器人
广茂达赛制机器人足球比赛_2v2-2009
广茂达赛制机器人足球比赛 ( 2 Vs 2 ) 一、比赛场地及设备标准 1、场地:长240cm,宽160cm,高18cm。 2、墙壁:场地边界放置墙壁(包括球门区),由木板制成。墙壁为绿色,球门内侧为灰色。 3、球门:球门位于场地底线的中间,球门宽60cm,深15cm,门前有一条宽0.8cm的红色球门线。 4、基板:球场铺有一张灰度由白至绿的渐变色图纸,基板应尽量保持平整和水平。 5、球门区:从球门线两端向中场延伸20cm的矩形区域。 6、点球位:两个半场内距球门线中点垂直距离60cm处。 7、开球点:球场中央点。 8、坠球点:将球场纵向4等份,形成3条线,与中场线的3个交点。如图所示(在真实的场地中坠球点没有明显标志)。 9、照明:比赛场地照明为室内体育馆灯光,采用冷光源。照明等级在比赛时才能确定。参赛者在比赛期间有时间了解周围的灯光等级及标定机器人。 10、机器人:机器人(包括所有部件)必须在一个直径为30cm圆的范围内,限高22cm,限重2.0kg。机器人踢球装置的深度最大为3cm。机器人的传感器与所安装部件必须不影响其他的机器人正常比赛。 11、足球:直径9cm,重160±5g。是一个内部装有电池与小电珠的透明发光球。 二、名词解释 1、出界球:足球(越过墙壁)被机器人踢出球场外。 2、进球:足球的中心(即球的1/2以上)越过球门线且非出界球,即为进球。 3、死球:足球被机器人和墙夹在中间无法移动、或足球被多个机器人包围卡住不动超过5秒钟,以及裁判认为球已不可能自由运动了,则为死球。 4、丢球:机器人在第一次踢出球以后5秒内没有再接触到球。 5、比赛中断:裁判员吹哨宣布比赛开始或继续后,在30秒内没有任何机器人触到球,而且看上去没有机器人将会触到球,为比赛中断。 6、坠球:当发生比赛中断时所采用的继续开始比赛的方式。 7、任意球:发生犯规判罚、出界球、点球未中时所采用的继续开始比赛的方式。 三、比赛规则 1、赛前准备: 各参赛队应根据比赛时间安排,提前10分钟进入比赛区域,做赛前检查及准备调试。比赛开始前,每个机器人需要接受全体裁判员的检查,以确证它们符合上述规范。检查时,机器人大小以其最突出部位为准,即最长点为计算点。不符合规则的机器人将被取消参赛资格。 不允许指导老师进入检查区域。
关于组织参加第九届海淀区青少年机器人竞赛的通知
关于组织参加第九届海淀区青少年机器人竞赛 的通知 内部编号:(YUUT-TBBY-MMUT-URRUY-UOOY-DBUYI-0128)
关于组织参加第九届海淀区青少年机器人竞赛的通知 人大附中的各位机器人爱好者: 为了推动机器人科学技术的普及,鼓励更多的青少年机器人爱好者在电子、信息、自动控制等高新科技领域进行学习、探索、研究和实践,激发他们对机器人技术的兴趣,提高他们的科学素质,海淀区科协、海淀区教委将于2009年 3月 14日举办“第九届海淀区青少年机器人竞赛”,现将有关报名参赛事宜通知如下: 一、竞赛时间:2009年 3月 14日(星期六)早8:30—下午5:00 二、竞赛地点:北方交大附中(地址:海淀区皂君庙12号) 三、竞赛内容 1.机器人基本技能比赛 主题:重建家园 2.机器人足球比赛 3.FLL机器人工程挑战赛 主题:应对气候变暖 4.VEX机器人工程挑战赛 主题:高地战斗 四、竞赛申报 1、名额分配: 各学校青少年机器人爱好者参加海淀区青少年机器人竞赛应首先参加各学校的选拔比赛。参赛学校按竞赛高中、初中、小学分组项目申报,一所学校每个项目最多选派两个队参赛。 2、申报时间: 和mayong@https://www.360docs.net/doc/e92635803.html,两个邮箱内,同时将纸质申报报名表及材料报送到高中楼6层网络办公室袁中果老师办公桌。
3、申报方式: 各项申报必须填写申报表(一式一份)和参赛项目要求报送的各类附件。本届竞赛需进行电子申报和纸质材料申报,纸质材料加盖学校公章,每个队员只能报一个项目,如有兼项,将取消该队员全部比赛资格。若学校某个项目报名队伍超过两个,先进行校内选拔。有关竞赛规则请登陆中国青少年机器人竞赛申报网站:中国青少年机器人教育在线()下载。报名表和报名通知可以到人大附中首页通知栏下载()。 竞赛执行《第九届中国青少年机器人竞赛规则》 五、联系人: 袁中果老师 阮海涛老师 马勇老师 电 话: 电子邮箱: 、 人大附中信息技术教研组 二00九年一月八号 附件:报名表附后 第九届北京市海淀区青少年机器人竞赛 机器人基本技能比赛报名表 省(区、市) 参 赛 学 校
机器人创意比赛作品范文.doc
【个人简历范文】 导语现在科技日益的发展,机器人在不久的将来成为我们的朋友。小孩的想象力极为丰富,现在整理出一些机器人朋友创意想象儿童画,供大家欣赏! 机器人朋友范文一 我有一位机器人朋友——小兰。她能带我环游世界。 这一天,我和小兰出去玩。小兰说“我带你去环游世界吧!”“好呀!好呀!”我兴奋的回答。于是小兰叫我骑在她的肩膀上。那一刻,我仿佛觉得她很高大,很威猛,当然,她都有两米多高,生体不强壮才怪呢?小兰简直就像一个“女汉子”!我骑在小兰的肩膀上,看着她迈着大步流星的步子,钢铁般的身体,还有她那微微的笑容,真的感动了我。 时间一分一秒的过去了。我问了小兰说“我们要一直这样走下去吗?”“不”小兰肯定的回答。待会你就知道怎么样了。小兰又回答。又走了一会儿。小兰问我,我想去那里,我能带你飞向你想去的地方。我听到了一时合不拢嘴。心想“就趁想在这个好机会,去我最想去的地方”。 “我要去长城”。我大声呐喊。小兰便说“你准备好了吗”?准——备——好——了!我闭着眼睛大声兴奋呐喊。一喊完我就马上睁开眼睛,就发现我骑在小兰的肩膀飞在蓝天之中。我欣赏着哪里的风景,还可以看见地下的房子。我发出一声巨大的赞叹“好好玩啊”!我又不禁发出一声又一声赞叹“好美的风景啊”! 不一会儿,如光速般的飞行,一下子就到了中国长城。小兰说“你听说过孟姜女哭长城的故事吗”?就是孟姜女为她丈夫织了一件寒衣给她丈夫,然后她得知她丈夫牺牲在这长城底下 。后来孟姜女一哭哭倒了长城的八百里。于是,我们走了走,欣赏了一下那里的风景。小兰有说“我带你去湖南的东江湖看看吧”! 到了东江湖,我们看到了东江湖那里的水;哪里的风景;那里的建筑,好美啊!我和小兰划了船,慢慢地欣赏着那里的美景!我和小兰不禁发出一声美的呐喊“这里太美丽了”!这句那么甜美的赞叹久久在东江湖上飘荡...... 这一天,是那么的开心;是那么的快乐;是那么的亲切。我既然有一个这么好的朋友。 我们我们俩儿不约而同的笑了,我们的欢声笑语传到了千里之外 机器人朋友范文二 机器人真是我的好朋友啊,大家听我细细道来吧 去年(2114年),人们的科学技术已达到了世界顶峰,机器人已经可以和人一样有情感、