机械原理考研讲义七(平面连杆机构及其设计)
第八章平面连杆机构及其设计
本章知识点串讲
本章的主要知识点有:
1.平面四杆机构的基本形式及其演化;
平面四杆机构的基本形式是平面铰链四杆机构,其它形式的四杆机构均可认为是它的演化形式.
铰链四杆机构可以通过4种方式演化出其他形式的四杆机构。即①取不同构件为机架;
②变转动副为移动副;③杆状构件与块状构件互换;④销钉扩大。
2.有关四杆机构的一些基本知识;
1)构件及运动副名称
构件名称:
连架杆——与机架连接的构件
曲柄——作整周回转的连架杆
摇杆——作来回摆动的连架杆
连杆——未与机架连接的构件
运动副名称:
回转副(又称铰链)
移动副
2)平面四杆机构有曲柄的条件:a. Lmax + Lmin≤ Lm (杆长条件);b. Lmin不得为连杆。
3)急回运动和行程速比系数
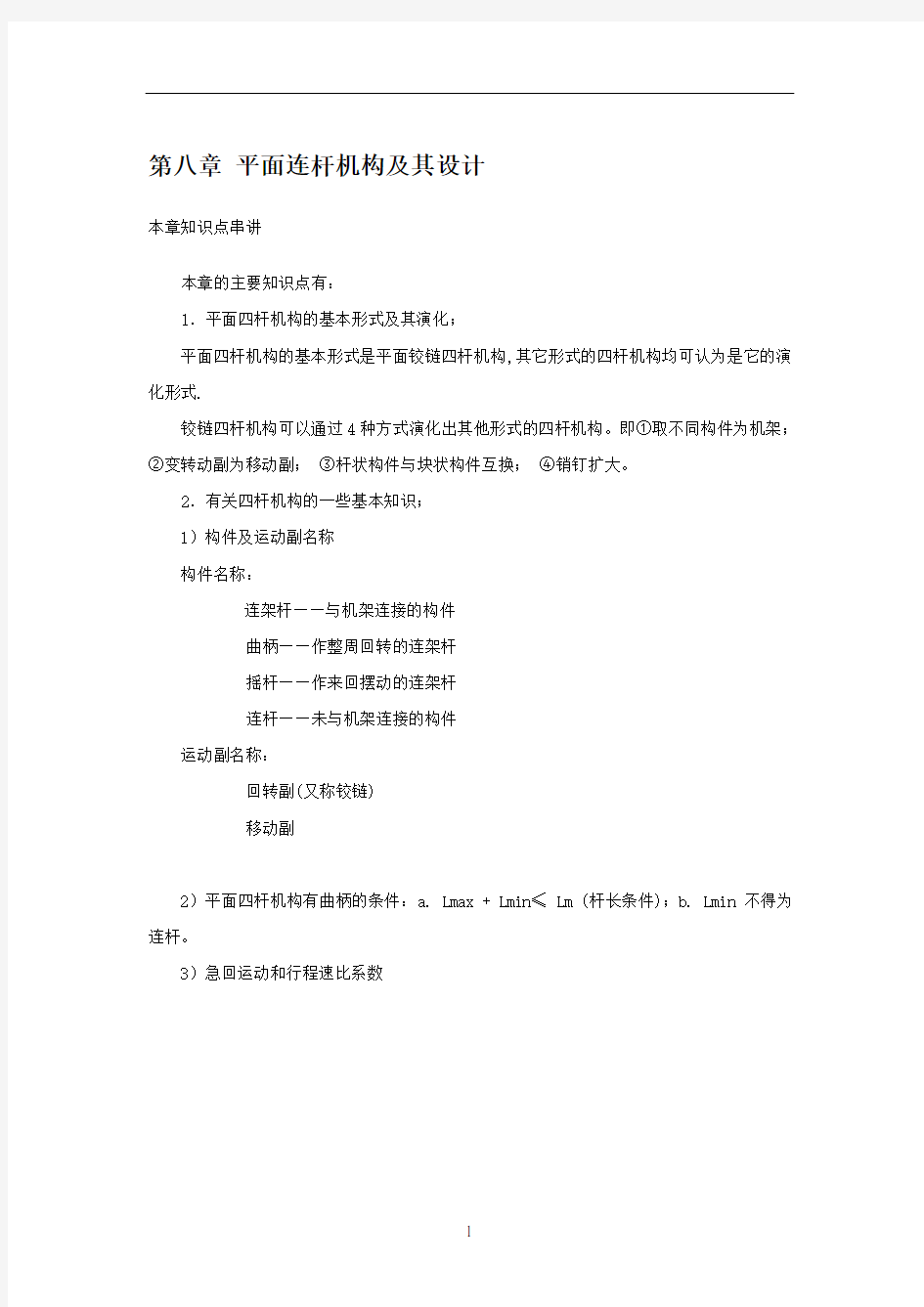
极限位置:当曲柄与连杆共线时,机构中摇杆所处的位置。亦称机构此时的位置称为机构处于极限位置。
极位夹角θ :当机构处于两极限位置时,曲柄所在线所夹的锐角。
急回特性:在曲柄等速回转的情况下,通常将作往复运动从动件速度快慢不同的运动称为急回运动。
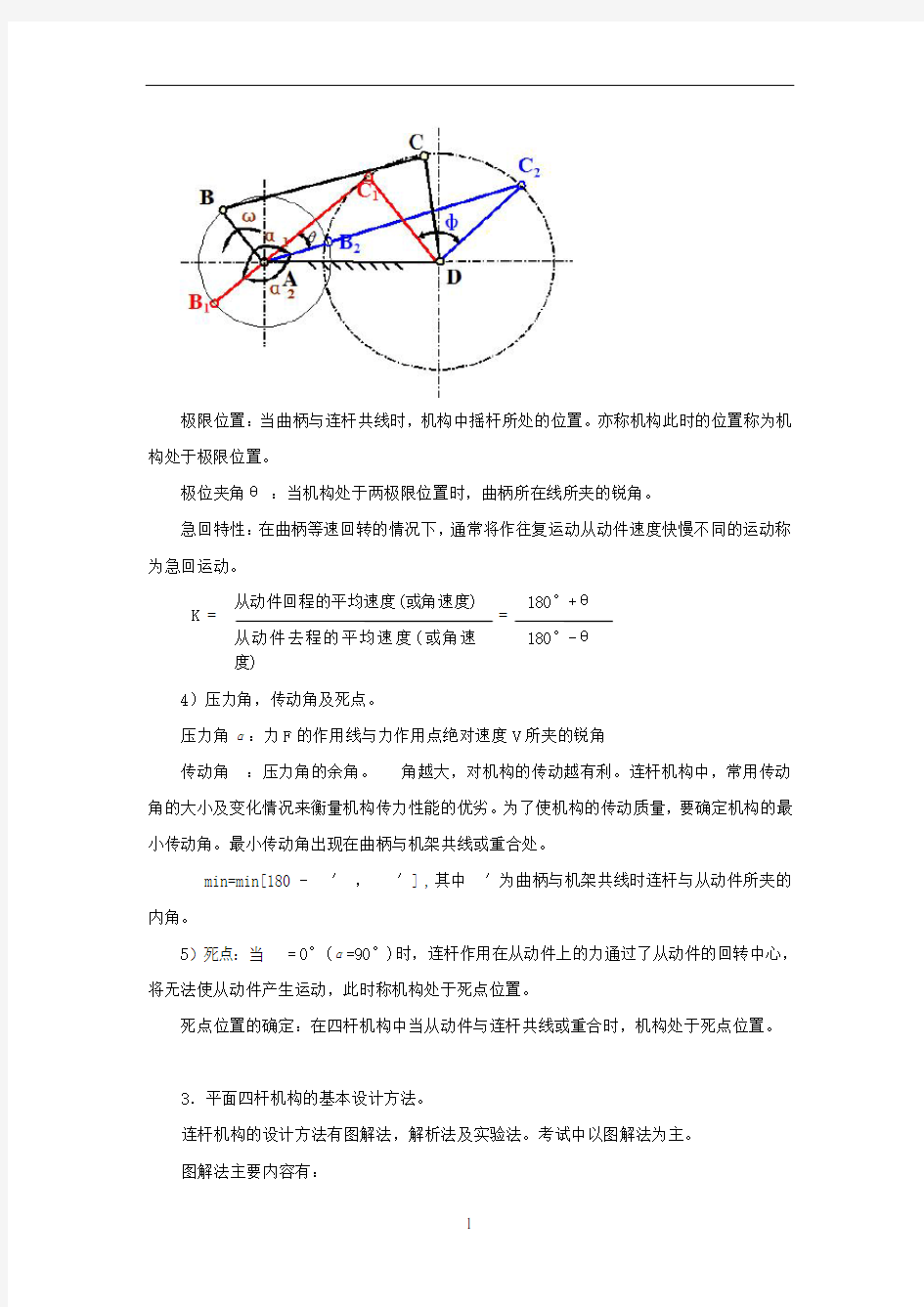
4)压力角,传动角及死点。
压力角α:力F 的作用线与力作用点绝对速度V 所夹的锐角 传动角:压力角的余角。
角越大,对机构的传动越有利。连杆机构中,常用传动
角的大小及变化情况来衡量机构传力性能的优劣。为了使机构的传动质量,要确定机构的最小传动角。最小传动角出现在曲柄与机架共线或重合处。
min=min[180 - ′ , ′] ,其中′为曲柄与机架共线时连杆与从动件所夹的
内角。
5)死点:当 = 0°(α=90°)时,连杆作用在从动件上的力通过了从动件的回转中心,将无法使从动件产生运动,此时称机构处于死点位置。
死点位置的确定:在四杆机构中当从动件与连杆共线或重合时,机构处于死点位置。
3.平面四杆机构的基本设计方法。
连杆机构的设计方法有图解法,解析法及实验法。考试中以图解法为主。 图解法主要内容有:
从动件回程的平均速度(或角速度) 从动件去程的平均速度(或角速
度)
K =
=
180°+θ 180°-θ
(1) 已知连杆位置及活动铰链找固定铰链
已知连杆两位置——无穷解。要唯一解需另加条件
已知连杆三位置——唯一解
已知连杆四位置——无解
(2)已知连杆位置EiFi及固定铰链找活动铰链(用相对运动分析法或反转法)
反转法原理:当给整个机构加一个共同的运动时,虽然各构件的绝对运动改变了,但是各构件之间的相对运动并不发生变化,因而各构件的相对尺寸不发生改变。因此对转化后的机构的设计与对原机构设计的结果完全一样,这样就可以将活动铰链的求解问题转化为固定铰链的求解问题。
(3) 按给定的行程速比系数K 等条件设计四杆机构
先根据行程速比系数K 计算出极位夹角,再根据题中给定的几何关系进行求解。 我们以下面二种情况对这类问题进行说明:
C 2
E 2
B 1
相对运动分析
如左图,站在机架上看:B 点饶A 点顺时针转动,C 点饶D 点顺时针转动。
站在连杆上观察:从位置1到位置2,
∠ABC 增大, ∠BCD 减小,即A 点饶B 点顺时针转动,C 点饶D 点顺时针转动。
如果知道两个连杆位置EiFi ,我们就可以确定活动铰链在机构处于某一位置时所在的直线;如果知道三个连杆位置EiFi ,我们就可以确定活动铰
链在某一位置时所在的点。
F
1
F 2
a 121223设计步骤:
◆ 连接E1A 、F1D 、E2A 、F2D(或E3A 、F3D ;
◆ 刚化E1F1DA 、E2F2DA(或E3F3DA), 并将E1F1和E2F2分别重合于E3F3,得到A1′、D1 ′、 A2 ′、和D2 ′点;
◆ 连接A1A2 、A2A3 、D1D2 和D2D3 、并分别作其垂直平分线,得交点, B3和C3; ◆ 连接AB3、DC3、B3C3、B3E3和C3F3得所需机构。 ◆ 根据图中线长,乘以比例尺得到各构件尺寸。
一.曲柄摇杆机构
二.曲柄滑块机构
已知条件:滑块行程H ,偏距e 及行程速比系数K 1. 计算θ=180 (K-1)/(K+1);
2. 选取比例尺mL ,并将已知条件线条化;
3. 过C1、C2分别作射线C1O 、 C2P ,使∠C1C2P = ∠C2C1O = 90°-θ,得交点N ;
4. 以N 点为圆心,以NC1为半径,画圆——A 点所在圆,并与A 点所在线交于两点;
已知条件:摇杆长LCD 、摆角j 及行程速比系数K a. 分析
θ= ×180°
K -1
K +1
b. 寻找A 点的位置
c. 设计步骤
● 已知条件线条化; ● 由K 计算出θ;
● 过C1 (或C2)点作C1 C2连线的垂线,过C2作 ∠ C1C2M=90°-θ与垂线交于N 点;
● 作△C1C2N 外接圆——曲柄回转中心A 点所在圆——无穷解;
● 利用另外条件获取唯一解;
本章重难点总结
8.2.1重难点知识点总结
本章难点为用图解法设计四杆机构中活动铰链位置的求解。考试时用到时的方法主要为反转法。
8.2.2本章重难点例题讲解
【例题1】如图所示,已知机架AD=50mm,摇杆CD离机架最近极限位置β=45°,且
CD=40mm,设该机构为曲柄摇杆机构,且行程速比系数K=,试用图解法求出曲柄AB和连杆BC 的长度,并绘出机构图.
解析:本题给定行程速比系数,要求我们设计四杆机构,这种题是考试时常遇到的题型。
(1)按μ=0.001m/mm作图.
根据θ =180 °(K-1)/(K+1),求出θ=30°,作∠C1AC=30°,与以D为圆心,DC长为半径所作的弧交于C1点;
(2)以A为圆心,以AC为半径画弧,交AC1于E点,则LAB=LEC1/2=*46/2=0.023m.
(3)以A为圆心,以LAB/μ==23mm长为半径作圆,与AC的延长线交于B点,则
LBC=μ*B1C1=*59=0.059m
LAB=0.023m
LBC=0.059m
平面连杆机构及其设计答案复习进程
第八章平面连杆机构及其设计 一、填空题: 1.平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。 2.在铰链四杆机构中,运动副全部是低副。 3.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 4.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 5.在铰链四杆机构中,与连架杆相连的构件称为连杆。 6.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 7.对心曲柄滑块机构无急回特性。 8.平行四边形机构的极位夹角θ=00,行程速比系数K= 1 。 9.对于原动件作匀速定轴转动,从动件相对机架作往复直线运动的连杆机构,是否有急回 特性,取决于机构的极位夹角是否为零。 10.机构处于死点时,其传动角等于0?。 11.在摆动导杆机构中,若以曲柄为原动件,该机构的压力角α=00。 12.曲柄滑块机构,当以滑块为原动件时,可能存在死点。 13.组成平面连杆机构至少需要 4 个构件。 二、判断题: 14.平面连杆机构中,至少有一个连杆。(√) 15.在曲柄滑块机构中,只要以滑块为原动件,机构必然存在死点。(√) 16.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 17.有死点的机构不能产生运动。(×) 18.曲柄摇杆机构中,曲柄为最短杆。(√) 19.双曲柄机构中,曲柄一定是最短杆。(×) 20.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 21.在摆动导杆机构中,若以曲柄为原动件,则机构的极位夹角与导杆的最大摆角相等。 (√) 22.机构运转时,压力角是变化的。(√) 三、选择题:
23.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A ≤ B ≥ C > 24.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而 充分条件是取 A 为机架。 A 最短杆或最短杆相邻边 B 最长杆 C 最短杆的对边。 25.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时, 有两个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 26.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 A 为机架时, 有一个曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 27.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 C 为机架时, 无曲柄。 A 最短杆相邻边 B 最短杆 C 最短杆对边。 28.铰链四杆机构中,若最短杆与最长杆长度之和 B 其余两杆长度之和,就一定是双摇杆 机构。 A < B > C = 29.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 C 为原动件时,此时机构处在死点位 置。 A 曲柄 B 连杆 C 摇杆 30.对曲柄摇杆机构,若曲柄与连杆处于共线位置,当 A 为原动件时,此时为机构的极限 位置。 A 曲柄 B 连杆 C 摇杆 31.对曲柄摇杆机构,当以曲柄为原动件且极位夹角θ B 时,机构就具有急回特性。 A <0 B >0 C =0 32.对曲柄摇杆机构,当以曲柄为原动件且行程速度变化系数K B 时,机构就具有急 回特性。 A <1 B >1 C =1 33.在死点位置时,机构的压力角α= C 。 A 0 o B 45o C 90o 34.若以 B 为目的,死点位置是一个缺陷,应设法通过。 A 夹紧和增力B传动 35.若以 A 为目的,则机构的死点位置可以加以利用。 A 夹紧和增力;B传动。
7.实验七 机构创新组合设计实验
实验七机构创新组合设计实验 一、实验目的 1、加深学生对平面机构的组成原理认识,进一步了解机构组成及运动特性。 2、训练学生的工程实践动手能力。培养学生创新意识及综合设计的能力。 二、实验设备及工具 1、JKZB-Ⅱ机构创新组合设计实验台。附件:齿轮、齿条、槽轮、凸轮、转动轴、连杆、各种连接组合零部件等。 2、装拆工具:十字起子、活动扳手、内六角扳手、钢板尺、卷尺等。 3、学生自备草稿纸、笔、绘图工具等。 三、实验要求 1、每2~3人一组,每一组实验前拟一份机构运动设计方案,实验后提交新设计方案. 2、完成实验后各组将机械零部件“物还原位”,老师验收后方可离去. 3、每人完成一份实验报告。 四、实验原理和方法 根据平面机构的组成原理:任何平面机构都可以由若干个基本杆组依次联接到原动件和机架上而构成,故可通过选定的机构类型,拼装该机构并进行分析。 1
五、实验内容 1、自行到实验室熟悉本实验中的实验装置,各种零部件、装拆工具的功能;了解机构的拼接方法,拟订自已的机构运动方案的拼接步骤。 2、自拟或课本提供的机构运动方案做为拼接对象。 3.拼接机构,将各基本杆组按运动传递规律顺序拼接到原动件和机架上。 4.绘制运动简图,分析所拼接的平面机构。 5.根据平面机构的组成原理,利用常用的零部件拼接调整,设计一种具有新型的带发明创造性的组合机构。每一组提交一份机构创新设计方案。 6.最后把组合机构安装在实验平台上,进行测试分析、运动分析、实验结果分析、拟定这次实验的步骤,并写出实验报告。 六、实验方法与步骤 1.学生使用“机构创新组合设计实验台”提供的各种零件。按照自己的运动方案简图,先在桌面上进行机构的初步试验组装,这一步的目的是杆件分层。一方面为了使各个杆件在互相平行的平面内运动,一一方面为了避免各个杆件,各个运动副之间发生运动干涉。 2.按照上一步骤试验好的分层方案,从最里层开始,依次将各个杆件组装连接到机架上。选取构件杆,连接转动副或移动副。凸轮。齿轮。齿条与杆件用转动副连接,凸轮。齿轮。齿条与杆件用移动副连接,杆件以转动副的形式与机架相连,杆件以移动副的形式与机架相连,最后组装连接输入转动的原动件或输入移动的原动件。 3.根据输入运动的形式选择原动件。若输入运动为转动(工程实际中以柴油机,电动机等为动力的情况),则选用双轴承式主动定铰链轴或蜗杆为原动件,并使用电机通过软轴联轴器进行驱动。若输入运动为移动(工程实际中以油缸,气缸等为动力的情况),可选用适当行程的气缸驱动,用软管连接好气缸,气控组件和空气压缩机并进行空载形成实验。 4.试用手动的方式摇动或推动原动件,观察整个机构各个杆,副的运动,确定运动没有干涉后,安装电动机,用柔性联轴节将电机与机构相连,或安装气缸,用附件将气缸与机构相连。 5.检查无误后,接通电源试机 6.观察机构系统的运动,对机构系统的工作到位情况,运动学及动力学特性作出定性的分析和评价。一般包括如下几个方面: ①各个杆、副是否发生干涉 ②有无形成运动副的两构件的运动不在一个平面,因而出现摩擦力过大的现象 ③输入转动的原动件是否为曲柄。 2
机构运动创新设计..
课程设计报告 学生姓名:________________ 学号:_________________ 学院: ______________________________________________ 班级: ______________________________________________ 题目: _______________ 机构运动创新设计______________
2015年1月5日 目录 、概述................................. 1 .....................................................
一、概述: 机构运动方案创新设计是各类复杂机械设计中决定性的一步,机构的设计选型一般先通过作图和计算来进行,一般比较复杂的机构都有多个方案,需要制作模型来试验和验证,多次改进后才能得到最佳的方案和参数。本实验所用搭接试验台能够任意选择平面机构类型,组装调整机构尺寸等功能,能够比较直观、方便的搭接、验证、调试、改进、确定设计方案,较好地改善了在校学生对平面机构的学习和设计一般只停留在理论设计“纸上谈兵”的状况二、课程设计目的: 1、培养学生对连杆机构的理解掌握与创新设计能力,加强学生的工程实践背景的训练,拓宽学生的知识面,培养学生的创新意识、综合设计及工程实践动手能力。 2 、通过机构的拼接,在培养工程实践动手能力的同时,要求学生在拼装一个已有模型之外,自己通过对现实生产和生活中的连杆机构机械产品的观察和理解,通过试验台设备进行拼装和仿真。通过解决实际问题,促进学生理论联系实际,学以致用;锻炼学生独立思考能力和动手能力。 3 、加深学生对连杆机构组成原理的认识,进一步掌握连杆机构的创新设计方法。 4、学习机构运动简图的测绘与自由度的计算。 三、课程设计要求和内容: 实验设备和工具 CQJP-D 机构运动创新设计方案拼装及仿真实验台,包括组成机构的各种运动副、构件、动力源及一套实验工具(扳手、螺丝刀)。其中构件包括机架、连杆、圆柱齿轮、齿条、凸轮及从动件、槽轮及拨盘和皮带轮等;运动副包括转动副、移动副、齿轮副、槽轮副等。 实验原理 平面机构是由各个杆组依次联结到机架和原动件上形成的。机构具有确定运动的条件是机构的自由度大于零,且原动件数和机构的自由度相等。所拼接的机构必须满足以上两个条件。将主要由连杆构成的连杆机构(可加入一个其他类型构件如齿轮、凸轮、槽轮等)进行拼装,计算分析其自由度后,输入动力源进行 机构运行。实验内容与步骤
连杆机构创新设计在机械工程实际中的应用
连杆机构创新设计在机械工程实际中的应用 发表时间:2017-07-05T11:21:33.760Z 来源:《防护工程》2017年第4期作者:陶海涛 [导读] 本文作者裁判能够连杆机构的定义出发,分析了连杆机构创新设计在机械工程实际中的应用。 浙江红旗机械有限公司浙江 313200 摘要:连杆机构的常用方法连杆机构的运动学分析包括位置分析、速度分析和加速度分析三个方面,其基础是力学中的运动学,现在己形成了较为成熟的连杆机构分析方法。机械产品通过创新设计,利用换代从根本解决产品更新问题。本文作者裁判能够连杆机构的定义出发,分析了连杆机构创新设计在机械工程实际中的应用。 关键词:连杆机构;创新设计;机械工程;应用 1 连杆机构及平面连杆机构 1.1 连杆机构概述 连杆机构又称低副机构,是机械的组成部分中的一类,指由若干有确定相对运动的构件用低副联接组成的机构。 平面连杆机构中最基本也是应用最广泛的一种型式是由四个构件组成的平面四杆机构。由于机构中的多数构件呈杆状,所以常称杆状构件为杆。低副是面接触,耐磨损;加上转动副和移动副的接触表面是圆柱面和平面,制造简便,易于获得较高的制造精度。连杆机构广泛应用于各种机械和仪表中。根据构件之间的相对运动为平面运动或空间运动,连杆机构可分为平面连杆机构和空间连杆机构。根据机构中构件数目的多少分为四杆机构、五杆机构、六杆机构等,一般将五杆及五杆以上的连杆机构称为多杆机构。当连杆机构的自由度为1时,称为单自由度连杆机构;当自由度大于1时,称为多自由度连杆机构。 根据形成连杆机构的运动链是开链还是闭链,亦可将相应的连杆机构分为开链连杆机构(机械手通常是运动副为转动副或移动副的空间开链连杆机构)和闭链连杆机构。单闭环的平面连杆机构的构件数至少为4,因而最简单的平面闭链连杆机构是四杆机构,其他多杆闭链机构无非是在其基础上扩充杆组而成;单闭环的空间连杆机构的构件数至少为3,因而可由三个构件组成空间三杆机构。 1.2 平面连杆机构 最简单的平面连杆机构是由四个构件组成的,称为平面四杆机构。它的应用非常广泛,而且是组成多杆机构的基础。 由若干个刚性构件通过低副(转动副、移动副))联接,且各构件上各点的运动平面均相互平行的机构,又称平面低副机构。低副具有压强小、磨损轻、易于加工和几何形状能保证本身封闭等优点,故平面连杆机构广泛用于各种机械和仪器中。与高副机构相比,它难以准确实现预期运动,设计计算复杂。 平面连杆机构中最常用的是四杆机构,它的构件数目最少,且能转换运动。多于四杆的平面连杆机构称多杆机构,它能实现一些复杂的运动,但杆多且稳定性差。 2 连杆机构运动学分析的常用方法 连杆机构的平面机构的机构,是将平面机构的位置分析问题归纳为求解三角形问题,并利用矢量方法来描述平面连杆机构的运动及动力分析,以机构中的“阿苏尔杆组”为基本单元,根据基本单元编制运动分析子程序,对每一基本杆组进行运动分析,解决了机械杆组的机构分析问题。同时把平面机构看成由一些相互约束的基点构成的系统,建立起数学模型,通过及诶额的运动分析,建立约束非线性方程组,需要引用数值解法各有特点,。针对连杆机构创新设计虚拟仿真的需要,选择基本杆组,调用相应的杆组程序对整个机构进行分析,在分析机构运动时,通过逐次求解各基本杆组来完成。建立不同机械运动分析的数学模型,随后编制成通用子程序,对速度及加速度等运动参数进行求解。快速求解出各点的运动参数。机构运动分析中构件之间应该满足装配条件,否则将不能进行正常的运动,为此建立构件库,形成机构运动简图符号库,由机构三维参数化实体模型库组成,如连杆的厚度。构件之间的拼接通过机构运动简图中构件之间的拼接关系直接生成,显示机械构件的编辑窗口进行参数的编辑。取两个构件上需要拼接的运动副来进行,把构件节点与提供的树映射 TreeMap 类,对所涉及的机构进行干涉检测。 3 连杆机构在机械工程实际工作中的具体应用 3.1 ANSYS软件对于机械工程结构的设计 合理的设计应该确保在各种环境下,使机械精确地保持形状和姿态。采用经验类比设计与简化计算相结合的方法,防止出现机械加工的产品成本高的问题,在当前客户要求越来越多样化的情况下,采用功能强大的ANSYS软件进行设计分析已成为可能,对建立的实体模型自动进行有限元网格的划分,提供了有限元计算的优异分析功能,可获得良好的计算精度。建立设计模型。进行有限元机械划分。建立边界条件,计算节点载荷,组成整体刚阵,求解有限元方程。建立实体模型,并输入需要产品材料特性,减少数量级的偏差。确定坐标系,可以完成计算中所有的前处理过程。 3.2 基于功能分析的创新设计机构系统设计 分析执行构件的运动形式,机械的连续旋转运动,往复摆动,往复移动和特殊功能运动,记录每分钟转位次数,运动系间歇转动数每分钟转角大小,满足机械运动规律的要求,适当设置调整环节。利用基本杆组法以机构中不可再分的运动链作为机构的基本单元,按单元编制通用的运动分析子程序,在分析进行机构运动后,将机构划分成基本杆组后对每一基本杆组进行运动分析,对整个根据工艺受力大小,制造加工难易进行比较,然后择优而取。曲柄摇杆机构的齿条齿轮机构及输出运动能够实现往复摆动,间歇往复摆动的组合机构可以实现间歇往复摆动,通过控制驱动液压缸,实现间歇往复摆动。利用连杆曲线的平面连杆机构,从动件凸轮机构,实现机械间歇往复移动。 3.3 在产品设计系统方面的创新 随着计算机辅助概念设计的研究,一些大型的CAD商品化软件中,生成高精度的曲面几何模型,并直接传送到机械设计和原型制造中,实现从符号描述到几何表示的映射,并对产品的相似实例进行评价与修改,进而获得产品概念设计的优化解。识别机构中的构件是否等于机构的原动件的数目,判定机构的运动确定性,构件中要对局部自由度、虚约束适当处理以便正确计算出机构的自由度。机械主动件做有规律运动,位置确定的运动时,每一个位置机构所有构件都是可行的。程序在计算位置并绘制机构运动过程中,评估机构运动分析中构件之间装配条件,杆
机械原理 平面连杆机构练习+答案
《机械设计基础》作业二--平面连杆机构 姓名班级学号成绩 一、填空题:(24分) 1、平面连杆机构,至少需要4个构件。 2、平面连杆机构是由一些刚性构件用转动副和移动副连接组成的。 3、在铰链四杆机构中,运动副全部是转动副。 4、在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5、某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 6、对心曲柄滑快机构无(有,无)急回特性;若以滑块为机架,则将演化成移动导杆机构。 双曲柄机构和双摇杆机构。如图所示铰链四 杆机构中,若机构以AB为机架时,则为双曲柄机 构;以BC杆为机架时,它为曲柄摇杆机构; 以CD杆为机架时,它为双摇杆机构;而以 AD杆为机架时,它为曲柄摇杆机构。 8、在曲柄摇杆机构中,当曲柄与机架两次共线位置时出现最小传动角。 9、压力角指:从动件上作用的力F 与该力作用点的速度(绝对速度)方向所夹的锐角α。 10、机构的压力角越小(大,小)对传动越有利。 11、运动副中,平面接触的当量摩擦系数为 f ,槽面接触的当量摩擦系数为f/sinθ,圆柱面接触的当量摩擦系数为ρ/r 。 12、移动副的自锁条件是驱动力F 与法向反力N的夹角β小于摩擦角?,即驱动力作用在摩擦角之内,转动副的自锁条件是驱动力作用在摩擦圆之内,即e<ρ,其中e为驱动力臂长,螺旋副的自锁条件是螺纹升角α小于或等于螺旋副的摩擦角或当量摩擦角,即α≤?。 二、选择题(27分) 1、当四杆机构处于死点位置时,机构的压力角____B____。 A.为0o B.为90o C.与构件尺寸有关 2、四杆机构的急回特性是针对主动件作___A_____而言的。 A. 等速转动 B. 等速移动 C. 变速转动或变速移动 3、对于双摇杆机构,最短构件与最长构件长度之和____B____大于其它两构件长度之和。 A . 一定 B. 不一定 C. 一定不 4、曲柄摇杆机构___B_____存在急回特性。 A . 一定 B. 不一定 C. 一定不 5、平面四杆机构所含移动副的个数最多为____B____。 A. 一个 B. 两个 C. 基圆半径太小
实验五 平面连杆机构创新设计实验
实验五平面连杆机构创新设计实验 一、实验目的 设计平面机构,并对所设计的机构进行拼接,完成机构特有的运动特性。二、实验仪器 8个创新组合实验台 三、实验要求 (1)每组设计两种不同的机构,其中一种机构从选题部分设计题目中进行选择,另一种机构自行命题,可以来源于参考书、网络或者现实生活中的机构,要求至少有两种基本连杆机构。要求在设计过程中利用一种创新设计方法对方案进行分析。 (2)每种机构都能实现其特定的运动特性。例如,牛头刨床要实现急回运动。通过查阅资料确定机构的运动特性。 (3)在报告上绘制初始方案的机构运动简图。 (4)实验报告请自行打印,将设计方案在课前准备好,填写到报告上。 (5)每班分成7-8组,每组3-4人。 (6)实验时自备三角板、圆规和草稿纸等文具。 四、选题部分设计题目:(每组任选一个) 蒸汽机机构、精压机机构、牛头刨床机构、插床机构、筛料机构、行程放大机构。 机构具体要求: (一)蒸汽机机构: 要求:1.实现活塞的往复运动; 2.运动传递由电机→曲柄→……→滑块。 (二)精压机机构 要求:构件平稳下压,物料受载均衡 (三)牛头刨床主切削运动机构 要求:具有急回特性,运动传递由电机→齿轮减速→导杆→……→滑块 (四)插床机构
要求:1.具有急回特性。 2.插刀实现大行程往复运动。 3. 运动传递由电机→齿轮减速→原动件曲柄→……→输出件插刀 (五)筛料机构 要求:1.具有急回特性。 2.加速度变化较大。 (六)行程放大机构: 要求:实现行程放大 五、报告要求 选题报告要求: (一)选题机构名称; (二)选题机构运动要求及特点; (三)利用功能分析法及设计目录对设计方案进行简单分析; (四)设计的机构简图; (五)实验中机构运动状况分析; (六)改进后的机构简图。 自命题报告要求: (一)命题机构名称; (二)命题机构运动要求及特点; (三)对设计方案进行简单分析; (四)所设计的结构简图; (五)实验中机构运动状况分析; (六)改进后的结构简图。
机械原理第八章 平面连杆机构及其设计
第八章 平面连杆机构及其设计 题8-1 试画出图示两种机构的机构运动简图,并说明他们各为何种机构。在图a 中偏心盘1绕固定轴O 转动,迫使滑块2在圆盘3的槽中来回滑动,而圆盘3又相对于机架4转动;在图b 中偏心盘1绕固定轴O 转动,通过构件2,使滑块3相对于机架4往复移动。(图a 的机构运动简图可有两种表达方式,绘出其中之一即可) A B (a) O 12 3 4 A B O 123导杆机构 或 O 曲柄摇块机构 题8-1 (b) 题8-2如图所示,设已知四杆机构各构件的长度a=240mm ,b=600mm ,c=400mm ,d=500mm ,试回答下列问题: 1)当取杆4为机架时,是否有曲柄存在?__________若有曲柄,则杆a 为曲柄,此时该机构为__________机构。 2)要使机构成为双曲柄机构,则应取杆_________为机架。
3) 要使此机构成为双摇杆机构,则应取杆_______为机架,且其长度的允许变动范围为_______________. 4) 如将杆4的长度改为d=400mm,而其他各杆的长度不变,则当分别以1、2、3杆为机架时,所获得的机构为___________机构。 解:1)因900500400600240=+=+≤+=+d c b a 且最短杆1为连架杆,故当取杆4为机架时,有曲柄存在。此时该机构为曲柄摇杆机构。 2)要使此机构成为双曲柄机构,则应取最短杆1为机架。 3)要使此机构成为双摇杆机构,则取最杆3为机架,其长度的允许变动范围为: (1)因最短杆1为连杆,即使满足杆长条件,此机构也不能成为双摇杆机构 (2)不满足杆长条件时,b 为最长杆,c 为最短杆,d a c b +>+ 140>c c 为最长杆,但不可能大于三杆长度之和 d b a c ++< 故1340 课程设计报告 学生姓名:学号: 学院: 班级: 题目: 机构运动创新设计 指导教师:苏天一 2015 年 1 月5日 目录 一、概述 1 二、课程设计目的 1 三、课程设计要求和内容 1 四、原始数据及技术参数 2 五、设计原理及设备 2 六、机构自由度计算 5 七、机构动力分析与计算 7 八、机构运动分析与计算 9 十、参考文献 12 一、概述: 机构运动方案创新设计是各类复杂机械设计中决定性的一步,机构的设计选型一般先通过作图和计算来进行,一般比较复杂的机构都有多个方案,需要制作模型来试验和验证,多次改进后才能得到最佳的方案和参数。本实验所用搭接试验台能够任意选择平面机构类型,组装调整机构尺寸等功能,能够比较直观、方便的搭接、验证、调试、改进、确定设计方案,较好地改善了在校学生对平面机构的学习和设计一般只停留在理论设计“纸上谈兵”的状况 二、课程设计目的: 1、培养学生对连杆机构的理解掌握与创新设计能力,加强学生的工程实践背景的训练,拓宽学生的知识面,培养学生的创新意识、综合设计及工程实践动手能力。 2、通过机构的拼接,在培养工程实践动手能力的同时,要求学生在拼装一个已有模型之外,自己通过对现实生产和生活中的连杆机构机械产品的观察和理解,通过试验台设备进行拼装和仿真。通过解决实际问题,促进学生理论联系实际,学以致用;锻炼学生独立思考能力和动手能力。 3、加深学生对连杆机构组成原理的认识,进一步掌握连杆机构的创新设计方法。 4、学习机构运动简图的测绘与自由度的计算。 三、课程设计要求和内容: 实验设备和工具 CQJP-D机构运动创新设计方案拼装及仿真实验台,包括组成机构的各种运动副、构件、动力源及一套实验工具(扳手、螺丝刀)。其中构件包括机架、连杆、圆柱齿轮、齿条、凸轮及从动件、槽轮及拨盘和皮带轮等;运动副包括转动副、移动副、齿轮副、槽轮副等。 实验原理 平面机构是由各个杆组依次联结到机架和原动件上形成的。机构具有确定运动的条件是机构的自由度大于零,且原动件数和机构的自由度相等。所拼接的机构必须满足以上两个条件。将主要由连杆构成的连杆机构(可加入一个其他类型构件如齿轮、凸轮、槽轮等)进行拼装,计算分析其自由度后,输入动力源进行 机械原理2013—2014学年 大作业 设计题目:四连杆式门座起重机 工作机构设计 姓名:瑞 学号: 20116447 专业班级: 11级铁道车辆一班 指导教师:何俊 2013/11/10 题目介绍、要求以及数据 设计题目:四连杆式门座起重机工作机构设计 一、设计题目简介 四连杆门座起重机 是通用式门座起重机, 广泛应用于港口装卸、 修造船厂、钢铁公司,主 要由钢结构、起升机构、 变幅机构、回转机构、 大车运行机构、吊具装 置(抓斗、简易集装箱 吊具、吊钩)、电气设备 及其它必要的安全和辅助设备组成。通过四连杆控制在吊臂前后运动的时候)起吊节点保持水平高度不变。 二、设计数据与要求 题号起重量 t 工作幅度(米)起升高度(米)工作速度m/min 装机容量 KW L2 L1 H1 H2 起升变幅回转运行 C 10 25 8 15 9 50 50 1.5 25 330 三、设计任务 1、依据设计参数绘出机构运动简图,并进行运动分析,确定实现起 吊点轨迹的机构类型 2、依据提供的设计数据对四连杆起吊机构进行尺度综合,确定满足 使用要求的构件尺寸和运动副位置; 3、用软件(VB、MATLAB、ADAMS或SOLIDWORKS等均可)对执行机构 进行运动仿真,并画出输出机构的位移、速度、和加速度线图。 4、编写说明书,其中应包括设计思路、计算及运动模型建立过程 以及效果分析等。 5、在机械基础实验室应用机构综合实验装置验证设计方案的可行性。 第一章、四连杆式门座起重机的介绍 第一节、四连杆式门座起重机的概述 门座起重机是起重机的一种,是随着港口事业发展起来的。第一次在港口上运用门座式起重机是在1890年将幅度不可变的固定式可旋转臂架型起重机横跨在窄型码头上,这是门座起重机的第一次运用。在第二次世界大战之后港用门座起重机迅速发展,在发展的过程中门座起重机还逐渐应用到作业条件与港口相近的船台和水电站等工作地点。 图1-1 M10-30门座起重机总图 ⒈电缆卷筒;2.转柱;3.门座;4.转台;5.机器房;6.起重量限制器;7. 变幅机构;8.臂架系统;9.防转装置;10.吊钩装置;11.抓斗稳定器;12. 抓斗;13.司机室;14.回转机构;15.起升机构;16.运行机构 一、填空题: 1.平面连杆机构是由一些刚性构件用低副连接组成的。 2.由四个构件通过低副联接而成的机构成为四杆机构。 3.在铰链四杆机构中,运动副全部是转动副。 4.在铰链四杆机构中,能作整周连续回转的连架杆称为曲柄。 5.在铰链四杆机构中,只能摆动的连架杆称为摇杆。 6.在铰链四杆机构中,与连架杆相连的构件称为连杆。 7.某些平面连杆机构具有急回特性。从动件的急回性质一般用行程速度变化系数表示。 8.对心曲柄滑快机构无急回特性。9.偏置曲柄滑快机构有急回特性。 10.对于原动件作匀速定轴转动,从动件相对机架作往复运动的连杆机构,是否有急回特性,取决于机构的极位夹角是否大于零。 11.机构处于死点时,其传动角等于0。12.机构的压力角越小对传动越有利。 13.曲柄滑快机构,当取滑块为原动件时,可能有死点。 14.机构处在死点时,其压力角等于90o。 15.平面连杆机构,至少需要4个构件。 二、判断题: 1.平面连杆机构中,至少有一个连杆。(√) 2.平面连杆机构中,最少需要三个构件。(×) 3.平面连杆机构可利用急回特性,缩短非生产时间,提高生产率。(√) 4.平面连杆机构中,极位夹角θ越大,K值越大,急回运动的性质也越显著。(√) 5.有死点的机构不能产生运动。(×) 6.机构的压力角越大,传力越费劲,传动效率越低。(√) 7.曲柄摇杆机构中,曲柄为最短杆。(√) 8.双曲柄机构中,曲柄一定是最短杆。(×) 9.平面连杆机构中,可利用飞轮的惯性,使机构通过死点位置。(√) 10.平面连杆机构中,压力角的余角称为传动角。(√) 11.机构运转时,压力角是变化的。(√) 三、选择题: 1.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和 A 其他两杆之和。 A <=; B >=; C > 。 2.铰链四杆机构存在曲柄的必要条件是最短杆与最长杆长度之和小于或等于其他两杆之和,而充分条件是取 A 为机架。 A 最短杆或最短杆相邻边; B 最长杆; C 最短杆的对边。3.铰链四杆机构中,若最短杆与最长杆长度之和小于其余两杆长度之和,当以 B 为机架时,有两 机械原理课程设计 任务书 题目:连杆机构设计B4 姓名:戴新吉 班级:机械设计制造及其自动化2011级3班 设计参数 设计要求: 1.用解析法按计算间隔进行设计计算; 2.绘制3号图纸1张,包括: (1)机构运动简图; (2)期望函数与机构实现函数在计算点处的对比表; (3)根据对比表绘制期望函数与机构实现函数的位移对比图; 3.设计说明书一份; 4.要求设计步骤清楚,计算准确。说明书规范。作图要符合国家标。按时独立完成任务。 目录 第1节平面四杆机构设计............................................ 1.1连杆机构设计的基本问题........................................... 1.2作图法设计四杆机构 (3) 1.3作图法设计四杆机构的特点 (3) 1.4解析法设计四杆机构 (3) 1.5解析法设计四杆机构的特点 (3) 第2节设计介绍.................................................... 2.1按预定的两连架杆对应位置设计原理 ................................ 2.2 按期望函数设计.................................................. 第3节连杆机构设计................................................ 3.1连杆机构设计..................................................... 3.2变量和函数与转角之间的比例尺 (8) 3.3确定结点值 (8) 部讲义,请勿流传 第五讲 平面连杆机构及其设计 连杆机构的传动特点: 1.因为其运动副一般为低副,为面接触,故相同载荷下,两元素压强小,故可承受较大载荷;低副元素便于润滑,不易磨损;低副元素几何形状简单,便于制造。2.当原动件以同样的运动规律运动时,若改变各构件的相对长度,可使从动件得到不同的运动规律。3.利用连杆曲线满足不同的规矩要求。4.增力、扩大行程、实现远距离的传动(主要指多杆机构)。 缺点: 1.较长的运动链,使各构件的尺寸误差和运动副中的间隙产生较大的积累误差,同时机械效率也降低。2.会产生系统惯性力,一般的平衡方法难以消除,会增加机构动载荷,不适于高速传动。 平面四杆机构的类型和应用 一、平面四杆机构的基本型式 1.曲柄摇杆机构2.双曲柄机构 3.双摇杆机构 二、平面四杆机构的演化型式 1.改变构件的形状和运动尺寸 曲柄摇杆机构 -----曲柄滑块机构 2.改变运动副的尺寸 偏心轮机构可认为是将曲柄滑块机构中的转动副的半径扩大,使之超过曲柄的长度演化而成的。 3.选用不同的构件为机架 (a ) 曲柄滑块机构 (b )AB ①以最短构件的相邻两构件中任一构件为机架时,则最短杆为曲柄,而与机架相连的另一构件为摇杆,即该机构为曲柄摇杆机构。 ②以最短构件为机架,则其相邻两构件为曲柄,即该机构为双曲柄机构。 ③以最短构件的对边为机架,则无曲柄存在,即该机构为双摇杆机构。 3.不满足杆长条件的机构为双摇杆机构。 注:曲柄滑块机构有曲柄的条件:a + e ≤ b 导杆机构:a < b时,转动导杆机构; a > b时,摆动导杆机构。 例题: 第七章机构创新设计 第一节同轨迹连杆机构 第二节 新型内燃 机的开发 第三节 联轴器的 创新设计 第四节 抓斗的原 理方案创 新设计 第五节 过载保护 装置的机 械结构设 计 实例 第一节同轨迹连杆机构 同轨迹四连杆机构是指自由度 f相同、输入构件的运动规律相同、输出构件上的一点轨迹相同的一组连杆机构,但这组连杆机构的运动学尺寸不同,所以其受力状态、动态性能有巨大差异。因而,同轨迹连杆机构的形成方法是机构创新设计的重要方法之一。 形成同轨迹连杆机构的罗伯特-契贝谢夫定理是由美国数学家萨姆尔·罗伯特于1875年和俄国学者契贝谢夫于1878年分别发现的,因此称为“罗伯特-契贝谢夫定理”。该定理的内容是:由一个四杆铰链机 构发生的一条连杆曲线,还可以由另外两个四杆铰链机构发生出来。或表述为同一连杆曲线,可以用三个不同的机构来实现。 1.连杆点k位于连杆两铰链连线上的同迹连杆机构 图形缩放原理如下图7-1a所示为一平行四边形机构,由平行四边形obkd与机架在o点铰接而成。a点为bk杆延长线上的一点。连接ao 得交点c。当a点沿任意给定轨迹运动时,c点将给出与a点相似但缩小了的轨迹。⑴ao除以co与ab除以kb的值是相等的为常数m(射线定理)。⑵当此四边形作为一刚体绕o转动一角度时,a点转到a',按射线定理有aa'与cc'的比值与ao与co的比例等于常数m。a点的一切运动都是这两部分运动的合成。因此c点的运动是以缩小的比例模拟a 点的运动,反之亦然。 图7-1 连杆点k在连杆线上的同还连杆机构 第一个同迹连杆机构设计如图7-1b所示,在原始机构上作平行四边形导引机构bodk。曲柄c0cdo为所示的第一个同迹连杆机构,k为连杆cd延长线上的点。所示曲柄拉摇杆机构的尺寸,如图中下面的公式。 第二个同迹连杆机构设计如图7-1c所示,在原始机构上作平行四边形导引机构a0ake。双摇杆机构a0efco为所求的第二个同迹连杆机构。第三个同迹连杆机构设计如图7-1d所示,co是两具同迹连杆机构中共同的新机架的固定铰链点,机架的三个固定铰链点a0与o,a0与co,o与co。 2.任意连杆点 k的同迹连杆机构 在图7-2a中,四杆机构a0a1b1b0为a1b1上有附加连杆点k的原始机构。由罗伯特-契贝谢夫定理决定的另两个四杆机构为a0a2c2c0 实验七平面机构创新设计实验 一、实验目的 1.加深对机构组成原理的认识;进一步了解机构组成及其运动特征; 2.训练实践动手能力,创新意识和综合设计的能力。 二、实验设备及工具 1.平面机构设计组合创新实验台; 2.活动扳手,固定扳手,内六角扳手,螺丝刀,安装锤、小油壶,直尺。 三、实验台结构 1.组合机架 组合机架是该实验台的主体,由底座和活动安装条部件两部分组成。 a.底座部分:主要起支承支架,安装电机板和电机用,与支架焊接组装为一整体。电机可在底座上作左、右、前、后调整移动。 b.活动安装条部分:在底座支架上,垂直装有二根方管立柱,其底部与底座部份焊接成一整体,可将其支架承受的力传递到实验台上,减少架体的受力变形。在支架体上采用滑条将5根活动安装条水平方向用螺栓与架体相联,实现左右灵活移动,在安装条上又安装若干个滑动块,且滑动块可随活动条上、下移动,调整任意间距。 2.组件清单 包括组成机构的各种运动副、构件、动力源。其中 1)直线电机:10㎜/s,配直线电机控制器,根据主动滑块移动的距离,调节两行程开关的相对位置来调节齿条或滑块往复运动距离,但调节距离不得大于400㎜;注意:机构拼接未运动前,应先检查行程开关与装在主动滑块座上的行程开关碰块的相对位置,以保证换向运动能正确实施,防止机件损坏; 2)旋转电机:10r/min,沿机架上的长形孔可改变电机的安装位置。 序 号 名称示意图规格数量备注 1 齿轮 M=2, α=20° Z=28、34、 42、51 各3 共12 D=56㎜; 68㎜; 84㎜; 102㎜ 2 凸轮基圆R=18 升回行程 20㎜ 3 凸轮推回程均为正 弦加速度运动规律 3 齿条 M=2 α=20° 4 单根齿条全长为 400㎜ 4 齿条护板8 用于防止齿轮在齿条上滑出 5 槽轮4槽 1 间隙机构的从动件, 6 拨盘双销 1 间隙机构的主动件 7 主动轴L=15㎜ 20㎜ 35㎜ 50㎜ 65㎜ 4 4 4 4 2 第三章 平面连杆机构及其设计 1、如图示的铰链四杆机构中,AD 为机架,AB a ==35 mm ,CD c ==50 mm ,30==d AD mm ,问BC b =在什么范围内该机构为双摇杆机构;该机构是否有可能成为双曲柄机构? 2、试画出图示机构的传动角γ和压力角α,并判断哪些机构在图示位置正处于“死点”? (1) (2) (3) (4) 5、在图示铰链四杆机构中,已知各构件的长度25=AB l mm ,55=BC l mm ,40=CD l mm , 50=AD l mm 。 (1)问该机构是否有曲柄,如有,指明哪个构件是曲柄; (2)该机构是否有摇杆,如有,用作图法求出摇杆的摆角范围; (3)以AB 杆为主动件时,该机构有无急回性?用作图法求出其极位夹角θ,并计算行程速度变化系数K ; (4)以AB 杆为主动件,确定机构的αmax 和γmin 。 6、图示为开关的分合闸机构。已知150=AB l mm ,200=BC l mm ,200=CD l mm , 400=AD l mm 。试回答: (1)该机构属于何种类型的机构; (2)AB 为主动件时,标出机构在虚线位置时的压力角α 和传动角γ; (3)分析机构在实线位置(合闸)时,在触头接合力Q 作用下机构会不会打开,为什么? 7、试设计一曲柄摇杆机构。设摇杆两极限位置分别为4090,15021===CD l ; ??mm ,50=AD l mm 。求AB l 、BC l 及行程速比系数K 和最小传动角γmin 。 (用图解法求解用图解法求解,简述作图步骤,并保留作图过程) 8、现需设计一铰链四杆机构,已知摇杆CD 的长度l CD =150mm ,摇杆的两极限位置与机架AD 所成的角度 903021==??,,机 构的行程速比系数K =1,试确定曲柄AB 和连杆BC 的长度。 10、设计一偏置曲柄滑块机构,已知滑块的行程速度变化系数K =1.5,滑块的行程10021=C C l mm ,导路的偏距20=e mm 。 (1)用作图法确定曲柄长度l AB 和连杆长度l BC ; (2)若滑块从点C 1至C 2为工作行程方向,试确定曲柄的合理转向; (3)用作图法确定滑块工作行程和空回行程时的最大压力角。 龙源期刊网 https://www.360docs.net/doc/eb7087659.html, 连杆机构创新设计在机械工程实际中的应用作者:翟万柱 来源:《数字化用户》2014年第01期 【摘要】对比机构运动学分析常用的方法,对连杆机构中不同杆组进行建模。在此基础 上提出创新设计系统,包括连杆方案创新设计、可行性判断和机构实体的自动映射等功能。在研究机构运动学分析常用方法的基础上,对连杆机构组进行运动学数学模型的建模。本文刨析了机构创新设计的原理,阐述了连杆机构创新设计在机械工程实际工作中的具体应用。 【关键词】计算机应用机构运动仿真机械工程连杆机构 连杆机构的常用方法连杆机构的运动学分析包括位置分析、速度分析和加速度分析三个方面,其基础是力学中的运动学,现在已形成了较为成熟的连杆机构分析方法。机械产品通过创新设计,利用换代从根本解决产品更新问题。机械创新设计就是利用相关科学技术成果,设计出具有创造性及实用性的机械产品。机械机构是用来变换运动和力的可动装置,实质就是构造并修改三维模型,创造出结构形式新颖的机构。它需要工程科学、产品加工方法和商业运作知识等各方面知识相互融合在一起,以产品全生命周期内最为重要的决策。在每个主要的功能都可以根据空间或结构上的关系,从机械框架中得到产品的成本、重量或总体尺寸样本,然后这个框架对一些特征或部件有十分明确的描述,但并不要求详细。设计的过程将已知基本单元进行新的组合,对现有物品的分解与重新组合构造,但是机构创新没有固定的模式可以依循,要创造出一种全新的新机构,就需要组合的连杆机构方案设计,综合运用多种创造性原理,将设计元素进行智能拼接与组合,实现预期功能价值的过程。 一、连杆机构运动学分析的常用方法 连杆机构的平面机构的机构,是将平面机构的位置分析问题归纳为求解三角形问题,并利用矢量方法来描述平面连杆机构的运动及动力分析,以机构中的“阿苏尔杆组”为基本单元,根据基本单元编制运动分析子程序,对每一基本杆组进行运动分析,解决了机械杆组的机构分析问题。同时把平面机构看成由一些相互约束的基点构成的系统,建立起数学模型,通过及诶额的运动分析,建立约束非线性方程组,需要引用数值解法各有特点,。针对连杆机构创新设计虚拟仿真的需要,选择基本杆组,调用相应的杆组程序对整个机构进行分析,在分析机构运 动时,通过逐次求解各基本杆组来完成。建立不同机械运动分析的数学模型,随后编制成通 用子程序,对速度及加速度等运动参数进行求解。快速求解出各点的运动参数。机构运动分 析中构件之间应该满足装配条件,否则将不能进行正常的运动,为此建立构件库,形成机构运动简图符号库,由机构三维参数化实体模型库组成,如连杆的厚度。构件之间的拼接通过机构运动简图中构件之间的拼接关系直接生成,显示机械构件的编辑窗口进行参数的编辑。取两 个构件上需要拼接的运动副来进行,把构件节点与提供的树映射 TreeMap 类,对所涉及的机构进行干涉检测。机构运动创新设计..
机械原理四连杆门座式起重机
平面连杆机构及其设计(参考答案)
机械原理课程设计-连杆机构b完美版.
机械原理连杆机构设计和分析5
第七章 机构创新设计
平面机构创新设计实验
山东理工大学机械原理考试原题目——四杆机构的设计
连杆机构创新设计在机械工程实际中的应用