Camera Link原理

2 Camera Link结构与原理
Camera Link是专门为数字摄像机的数据传输提出的接口标准,专为数字相机制定的一种图像数据、视频数据控制信号及相机控制信号传输的总线接口,数据传输速率最高可达2.38 Gbps。该标准规定了接口模式、相机信号、端口配置、图像数据位配置、连接器引脚定义及连接线、标准接收器芯片组。采用
这种标准后,使得数字摄像机的数据接口输出采用更少的线数,连接电缆更容易制造,更具有通用性,而
且数据的传输距离比普通传输方式更远。其最主要的特点是采用了LVDS(Low VoltageDifferential Signaling,低压差分信号)技术,使摄像机的数据传输速率大大提高。
在Careera Link标准出现之前,业界有一些标准(如较流行的IEEE-1394:接口)作为一种数据传
输的技术标准。IEEE-1394被应用到众多的领域,数字相机、摄像机等数字成像领域也有很广泛的应用。IEEE-1394接口具有廉价,速度快,支持热拔插,数据传输速率可扩展,标准开放等特点。但随着数字
图像采集速度的提高、数据量的增大,原有的标准已无法满足需求。为了简化数据的连接,实现高速、高
精度、灵活、简单的连接,在 NationalSemiconductor公司开发的Channel Link总线技术基础上,
由多家相机制造商共同制定推出了Camera Link标准。基于Camera Link的数字相机的采集速度和数
据量均好于基于IEEE-1394标准。
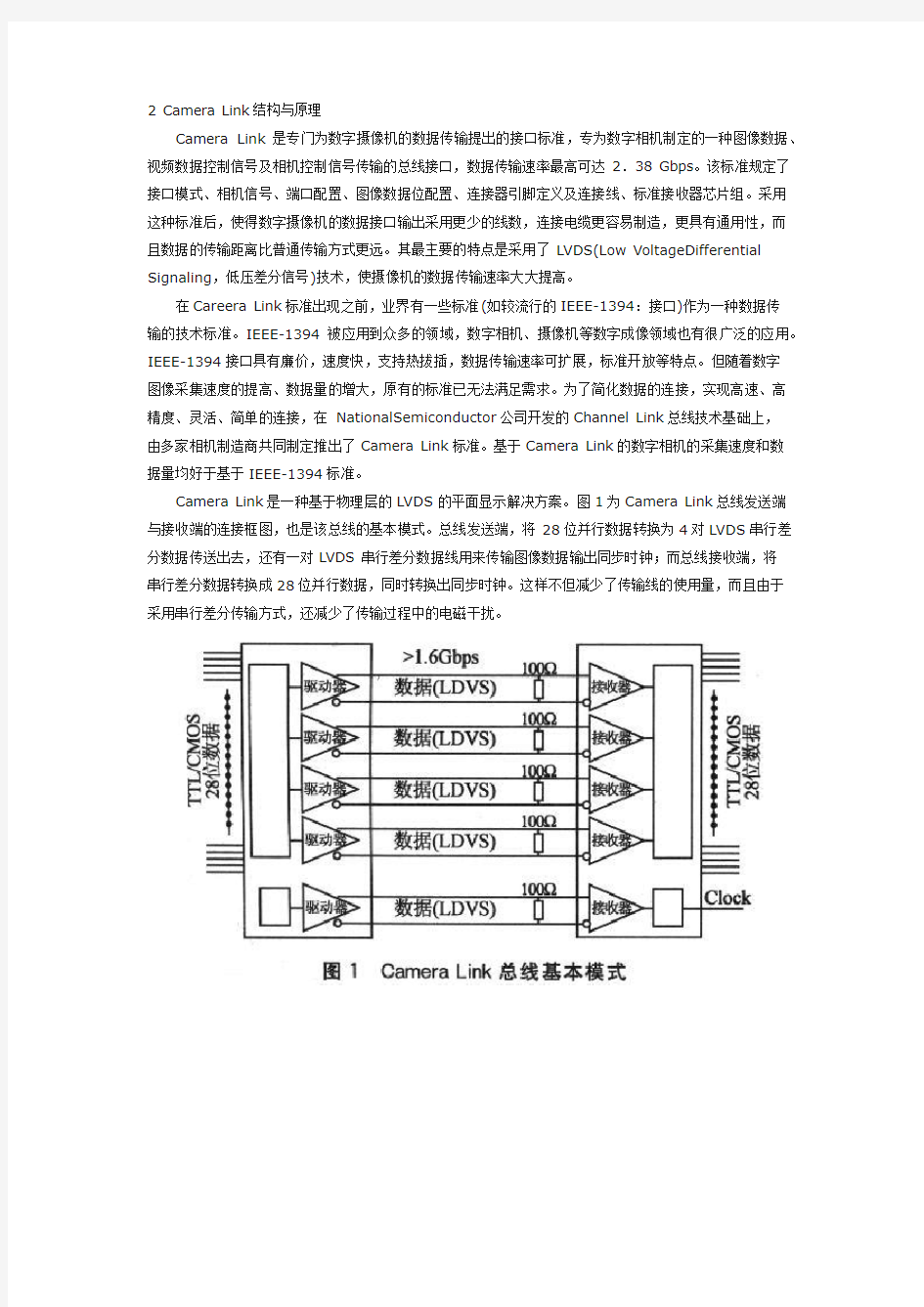
Camera Link是一种基于物理层的LVDS的平面显示解决方案。图1为Camera Link总线发送端
与接收端的连接框图,也是该总线的基本模式。总线发送端,将28位并行数据转换为4对LVDS串行差分数据传送出去,还有一对LVDS 串行差分数据线用来传输图像数据输出同步时钟;而总线接收端,将
串行差分数据转换成28位并行数据,同时转换出同步时钟。这样不但减少了传输线的使用量,而且由于
采用串行差分传输方式,还减少了传输过程中的电磁干扰。
3 高速数据采集卡Camera Link接口设计
高速数据采集系统的基本框图如图2所示。FPGA给相机发出控制信号,相机中的数据通过Careera Link接口传送到图像采集卡;数据由FPGA读入,缓存在SDRAM中。可以在FPGA中根据用户的需求实现高速的图像处理,根据图像处理的结果可以由 FPGA完成用户所需的控制。图像采集卡通过PCI接口和计算机相连接,通过计算机可以配置图像采集卡和相机,计算机也可以从采集卡中获得图像处理数据。接下来详细研究FPGA和相机间的Camera Link接口技术。
3.1 DS-21-02M30相机的Camera Link接口
Camela Link总线标准规定:在完整模式下,最多可以使用8个端口(Port A~Port H)传输数据,每个端口为8位数据。DS-21-02M30相机使用Port A~Port C端口,用的是基本模式(Base)。相机后端有一个MDR26连接口,分别对应A、B、C三个端口各8位数据,加上FVAL、LVAL、DVAL和SP 四位数据控制信号,共28位并行数据位。
3.2 Camera Link接口的硬件设计
Camera Link的硬件连接框图如图3所示。硬件电路包括3部分:相机通过MDR26连接图像采集卡;CameraLink接口的LVDS信号和CMOS信号转换电路;FPGA接收相机数据和发送控制部分。
为了对相机进行外部触发方式控制以及向相机发送命令,用四通道CMOS信号转换为LVDS差分信号的芯,片。DS90LV047作为图像采集卡,向相机发送外同步触发信号和转换命令。由于DS-21-
02M30相机只用到CC1,FPGA构成的图像采集卡,对相机的控制通过CC1和SerTC信号实现。为了
接收相机向图像处理系统发送的应答字符串,选用DS90LV048芯片作为图像处理系统接收器。
DS90LV048芯片是四通道LVDS差分信号转换为CMOS信号的驱动器。
4 总结
基于FPGA的高速图像采集系统,通过Camera Link接口和相机连接;从相机获得高分辨率的实时图像,并传输到FPGA中进行实时图像处理并输出。本文结合DS-21-02M30相机的基本功能,详细研究了Camera Link接口技术,并给出了相机和高速图像采集卡之间CameraLink接口设计,为正在研制的实时高速图像采集卡奠定了基础。
CameraLink是从Channel link技术上发展而来的,基于视频应用发展而来的通信接口,在机器视觉系统中广泛应用。
2000年10月美国NI、摄像头供应商和其他图像采集公司联合推出了CameraLink协
议,CameraLink协议是一个工业高速串口数据
和连接标准,旨简化图像采集接口,方便高速数字相机和数据采集卡的连接。
接口配置: Camera Link的接口有三种配置Base、Medium、Full,主要是解决数据传输量的问题,这为不同速度的相机提供了适
合的配置和连接方式。
1、Base
Base占用3个端口,(一个Channel Link芯片包含3个端口)、1个Channel Link芯片,24bit 视频数据。
一个Base使用一个连接口。如果使用2个一样的Base接口,就成为双Base接口。最大传输速度:2.0Gb/S @ 85MHZ
2、Medium
Medium = 1 Base +1 Channel Link 基本单元,最大传输速度:4.8Gb/S @ 85MHZ
3、Full
Full = 1 Base + 2 Channel Link 基本单元, 最大传输速度:5.4Gb/S @ 85MHZ
常见的Camera Link接口照相机
Camera Link接口技术原理
Camera Link接口MDR-26连接器针脚定义
摄像头工作原理
摄像头的工作原理大致为:景物通过镜头()生成的光学图像投射到图像传感器表面上,然后转为电信号,经过(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片()中加工处理,再通过接口传输到电脑中处理,通过显示器就可以看到图像了。 注:图像传感器()是一种半导体芯片,其表面包含有几十万到几百万的光电二极管。光电二极管受到光照射时,就会产生电荷。 注:数字信号处理芯片( )功能:主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过等接口传到等设备。 结构框架: . ( )(镜像信号处理器) . (图像解码器) . (设备控制器) 摄像头的构成主要包括主控芯片、感光芯片、镜头和电源。好的电源也是保证摄像头工作的一个方面。摄像头镜头:五玻镜头是主流 这个问题对于大多数人来说已经不算问题了,笔者提出来也只是仅对小白而言。简单的说镜头是由透镜组成,摄像头的镜头一般是由玻璃镜片或者塑料镜片组成的。玻璃镜头能获得比塑料镜头更清晰的影像。这是因为光线穿过普通玻璃镜片通常只有~的光损失,而塑料镜片的光损失高达~。有些镜头还采用了多层光学镀膜技术,有效减少了光的折射并过滤杂波,提高了通光率,从而获得更清晰影像。
然而,现在很多小厂,为了节约成本、追求高利润,往往减少镜片的数量,或者使用廉价的塑料镜头。虽然这些产品在价格上便宜不少,看上去很有吸引力,但实际的成像效果却实在是令人无法恭维。现在市面上大多数摄像头采用的都是五玻镜头,但是不乏少数商家将塑料镜头说成五玻镜头的。因此消费者在选购一些杂牌摄像头时,一定要详细试用一下,谨防上当受骗。 另外,镜头还有一个重要的参数那就是光圈,通过调整光圈可以控制通过镜头到达传感器的光线的多少,除了控制通光量,光圈还具有控制景深的功能,即光圈越大,则景深越小 摄像头感光器件:一定比好吗? 在选择摄像头时,镜头是很重要的。按感光器件类别来分,现在市场上摄像头使用的镜头大多为和两种,其中(,电荷耦合组件)因为价格较高更多是应用在摄像、图象扫描方面的高端技术组件,(-,附加金属氧化物半导体组件)则大多应用在一些低端视频产品中。
Smart Link技术介绍
局域网协议目录 目录 Smart Link (1) Smart Link简介 (1) Smart Link产生背景 (1) Smart Link概念介绍 (2) Smart Link运行机制 (2)
Smart Link Smart Link简介 Smart Link产生背景 当下游设备连接到上游设备时,使用单上行方式容易出现单点故障,造成业务中断。因此通常采用双上行方式,即将一台下游设备同时连接到两台上游设备,以最大限度地避免单点故障,提高网络可靠性,如图 1所示。 图 1Smart Link应用场景示意图 E t h 1/1 双上行组网虽然能提高网络可靠性,但又引入了环路问题。通常可通过STP(Spanning Tree Protocol,生成树协议)或RRPP(Rapid Ring Protection Protocol,快速环网保护协议)来消除环路,但STP在收敛速度上只能达到秒级,不适用于对收敛时间有很高要求的用户,而RRPP尽管在收敛速度上能达到要求,但组网配置的复杂度较高,主要适用于较复杂的环形组网。 为了在满足用户对链路快速收敛要求的同时又能简化配置,我们针对双上行组网提出了Smart Link 解决方案,实现了主备链路的冗余备份,并在主用链路发生故障后使流量能够迅速切换到备用链路上,因此具备较高的收敛速度。Smart Link的主要特点如下: z专用于双上行组网; z收敛速度快(达到亚秒级); z配置简单,便于用户操作。
Smart Link概念介绍 1. Smart Link组 Smart Link组也叫灵活链路组,每个组内只包含两个端口,其中一个为主端口,另一个为从端口。 正常情况下,只有一个端口处于转发(ACTIVE)状态,另一个端口被阻塞,处于待命(STANDBY)状态。当处于转发状态的端口出现链路故障时(这里的链路故障包括端口down、OAM单通等),Smart Link组会自动将该端口阻塞,并将原阻塞的处于待命状态的端口切换到转发状态。 如图 1所示,Device C和Device D各自的端口Ethernet1/1和Ethernet1/2分别组成了一个Smart Link 组,其中Ethernet1/1处于转发状态,而Ethernet1/2处于待命状态。 2. 主端口/从端口 主端口和从端口是Smart Link组中的两个端口角色。当Smart Link组中的两个端口都处于up状态时,主端口将优先进入转发状态,而从端口将保持待命状态。但是,主端口并不一直处于转发状态,而从端口也并不一直处于待命状态。当主端口所在链路发生故障时,从端口将切换为转发状态。 如图 1所示,Device C和Device D各自的端口Ethernet1/1为主端口,Ethernet1/2为从端口。 3. 主链路/从链路 我们把主端口所在的链路称为主链路,从端口所在的链路称为从链路。 4. 保护VLAN 保护VLAN是Smart Link组控制其转发状态的用户数据VLAN。同一端口上不同的Smart Link组保护不同的VLAN。端口在保护VLAN上的转发状态由端口在其所属Smart Link组内的状态决定。 5. 发送控制VLAN 发送控制VLAN是用于发送Flush报文的VLAN。当发生链路切换时,设备(如图 1中的Device C和Device D)会在发送控制VLAN内广播发送Flush报文。 6. 接收控制VLAN 接收控制VLAN是用于接收并处理Flush报文的VLAN。当发生链路切换时,设备(如图 1中的Device A、Device B和Device E)接收并处理属于接收控制VLAN的Flush报文,进行MAC地址转发表项和 ARP/ND表项的刷新操作。 7. Flush报文 当Smart Link组发生链路切换时,原有的转发表项将不适用于新的拓扑网络,需要网络中的所有设备进行MAC地址转发表项和ARP/ND表项的更新。这时,Smart Link组通过发送Flush报文通知其它设备进行MAC地址转发表项和ARP/ND表项的刷新操作。Flush报文是普通的组播数据报文,会被阻塞的接收端口丢弃。 Smart Link运行机制 1. 链路备份机制 在图 1所示的组网中,Device C的端口Ethernet1/1所在的链路是主链路,Ethernet1/2所在的链路是从链路。正常情况下,Ethernet1/1处于转发状态,Ethernet1/2处于待命状态。当主链路出现故障时,Ethernet1/1将自动阻塞并切换到待命状态,Ethernet1/2将切换到转发状态。
变速器和同步器图解
变速器和同步器图解 三轴五当变速器传动简图 1-输入轴 2-轴承 3-接合齿圈 4-同步环 5-输出轴 6-中间轴 7-接合套 8-中 间轴常啮合齿轮 此变速器有五个前进档和一个倒档,由壳体、第一轴(输入轴)、中间轴、第二轴(输出轴)、倒档轴、各轴上齿轮、操纵机构等几部分组成。 两轴五当变速器传动简图
1-输入轴 2-接合套 3-里程表齿轮 4-同步环 5-半轴 6-主减速器被动齿轮 7-差速器壳 8-半轴齿轮 9-行星齿轮 10、11-输出轴 12-主减速器主动齿轮 13-花键毂 与传统的三轴变速器相比,由于省去了中间轴,所以一般档位传动效率要高一些;但是任何一档的传动效率又都不如三轴变速器直接档的传动效率高。 同步器有常压式,惯性式和自行增力式等种类。这里仅介绍目前广泛采用的惯性式同步器。 惯性式同步器是依靠摩擦作用实现同步的,在其上面设有专设机构保证接合套与待接合的花键齿圈在达到同步之前不可能接触,从而避免了齿间冲击。 惯性同步器按结构又分为锁环式和锁销式两种。 其工作原理可以北京BJ212型汽车三档变速器中的二、三档同步器为例说明。花键毂7与第二轴用花键连接,并用垫片和卡环作轴向定位。在花键毂两端与齿轮1和4之间,各有一个青铜制成的锁环(也称同步环)9和5。锁环上有短花键齿圈,花键齿的断面轮廓尺寸与齿轮 1,4及花键毂 7上的外花键齿均相同。在两个锁环上,花键齿对着接合套8的一端都有倒角(称锁止角),且与接合套齿端的倒角相同。 锁环具有与齿轮1和4上的摩擦面锥度相同的内锥面,内锥面上制出细牙的螺旋槽,以便两锥面接触后破坏油膜,增加锥面间的摩擦。三个滑块2分别嵌合在花键毂的三个轴向槽11内,并可沿槽轴向滑动。在两个弹簧圈6的作用下,滑块压向接合套,使滑块中部的凸起部分正好嵌在接合套中部的凹槽10中,起到空档定位作用。滑块2的两端伸入锁环9和5的三个缺口12中。只有当滑块位于缺口12的中央时,接合套与锁环的齿方可能接合。
注塑结构及工作原理
(一)注塑机结构分析及其工作原理 0…… 一、注塑机的工作原理 注塑成型机简称注塑机。 注塑成型是利用塑料的热物理性质,把物料从料斗加入料筒中,料筒外由加热圈加热,使物料熔融,在料筒内装有在外动力马达作用下驱动旋转的螺杆,物料在螺杆的作用下,沿着螺槽向前输送并压实,物料在外加热和螺杆剪切的双重作用下逐渐地塑化,熔融和均化,当螺杆旋转时,物料在螺槽摩擦力及剪切力的作用下,把已熔融的物料推到螺杆的头部,与此同时,螺杆在物料的反作用下后退,使螺杆头部形成储料空间,完成塑化过程,然后,螺杆在注射油缸的活塞推力的作用下,以高速、高压,将储料室内的熔融料通过喷嘴注射到模具的型腔中,型腔中的熔料经过保压、冷却、固化定型后,模具在合模机构的作用下,开启模具,并通过顶出装置把定型好的制品从模具顶出落下。 注塑机作业循环流程如图1所示。 图1 注塑机工作程序框图 二、注塑机的分类 按合模部件与注射部件配置的型式有卧式、立式、角式三种 (1)卧式注塑机:卧式注塑机是最常用的类型。其特点是注射总成的中心线与合模总成的中心线同心或一致,并平行于安装地面。它的优点是重心低、工作平稳、模具安装、操作及维修均较方便,模具开档大,占用空间高度小;但占地面积大,大、中、小型机均有广泛应用。 (2)立式注塑机:其特点是合模装置与注射装置的轴线呈一线排列而且与地面垂直。具有占地面积小,模具装拆方便,嵌件安装容易,自料斗落入物料能较均匀地进行塑化,易实现自动化及多台机自动线管理等优点。缺点是顶出制品不易自动脱落,常需人工或其它方法取出,不易实现全自动化操作和大型制品注射;机身高,加料、维修不便。 (3)角式注塑机:注射装置和合模装置的轴线互成垂直排列。根据注射总成中心线与安装基面的相对位置有卧立式、立卧式、平卧式之分:①卧立式,注射总成线与基面平行,而合模总成中心线与基面垂直;②立卧式,注射总成中心线与基面垂直,而合模总成中心线与基面平行。角式注射机的优点是兼备有卧式与立式注射机的优点,特别适用于开设侧浇口非对称几何形状制品的模具。
H3C配置手册-Smart Link和Monitor Link
Smart Link和Monitor Link Smart Link Monitor Link
引入 ?Smart Link是一种针对双上行组网的解决方案,实现了高效可 靠的链路冗余备份和故障后的快速收敛。 靠的链路冗余备份和故障后的快速收敛 ?Monitor Link是对Smart Link技术的有力补充。Monitor Link 用于监控上行链路,以达到让下行链路同步上行链路状态的目的,使Smart Link的备份作用更加完善。 ?本章对这两种链路层高可靠性技术进行介绍。
课程目标 ?掌握Smart Link 的运行机制和配置学习完本课程,您应该能够: ?掌握Monitor Link 的运行机制和配置S t Li k M it Li k ?掌握Smart Link 和Monitor Link 的典型组网
目录 ?Smart Link简介 ?Monitor Link简介 Monitor Link ?Smart Link & Monitor Link典型组网?Smart Link & Monitor Link配置
SWA SWC SWB Smart Link 解决方案实现了主备链路的冗余SWD Smart Link 解决方案,实现了主备链路的冗余备份,具备快速收敛性能,收敛速度可达到亚秒级。
SWA VLAN 10 SWC SWB Smart Link 组 Master Port Slave Port VLAN 10 SWD 上的二个端口组成了一个Smart Link SWD VLAN 20 上的二个端口组成了个Smart Link 组,端口分别为主端口和副端口,发送控制VLAN 和接收控制VLAN 为VLAN 10,保护VLAN 是VLAN 20。
感应同步器的原理及应用
感应同步器工作原理及应用 摘要:感应同步器是利用电磁原理将线位移和角位移转换成电信号的一种装置。根据用途,可将感应同步器分为直线式和旋转式两种,分别用于测量线位移和角位移线。将角度或直线位移信号变换为交流电压的位移传感器,又称平面式旋转变压器。它有圆盘式和直线式两种。在高精度数字显示系统或数控闭环系统中圆盘式感应同步器用以检测角位移信号,直线式用以检测线位移。感应同步器广泛应用于高精度伺服转台、雷达天线、火炮和无线电望远镜的定位跟踪、精密数控机床以及高精度位置检测系统中。 关键词:感应同步器、原理、应用、直线式、旋转式 Abstract:The inductosyn is a system that transform the linear and angular displacement into electric signal use the Electromagnetic theory.According to its use the inductosyn can be divided into the linear and the rotary,which is use to measure the linear and the angular.The linear inductosyn that transform the linear and angular displacement into AC V oltage is called plane rotary transformer,which is divided into two types than is the linear and the disc.In the precision digital display system or CNC closed-loop system,the disc inductosyn is used to measure the signal of angular and the linear inductosyn is used to measure the signal of linear.The inductosyn is also widely used in the location tracking ,the precision CNC machine tools and the high-precision position detection system of the precision servo turntable, the radar antenna, the artillery and the radio Telescope. Keywords: inductosyn theory use linear rotary 1.感应同步器的工作原理 感应同步器是利用两个平面形绕组的互感随位置而变化的原理而进行工作的。 直线式感应同步器由定尺和滑尺组成,定尺上是连续绕组,滑尺上是分段绕组,滑尺为正余弦绕组。其绕组布置如图1所示。滑尺上展开分布着两个印刷电路绕组,每个节距相当于绕组空间分布的周期,又称极距,一般为2mm,用2τ表示。 滑尺与定尺相互面向平行安装,两者保持0.2mm左右距离。感应同步器的工作原理如图2所示。当定尺绕组加以频率为f,幅值恒定的交流激磁电流I(或电压)时,滑尺两绕组将产生与激磁电流频率相同、幅值随两尺相对位置而变化的感应电势e,滑尺某一绕组与定尺绕组完全重合时,磁通耦合度最大,故该滑尺感应的电势最大;两绕组错开1/4节距(即1/4*2τ=0.5τ)时,滑尺耦合的
水性印刷机机械结构及工作原理
水性印刷机机械结构及工作原理——课程小结 一、水性印刷机的种类 1、水性印刷机的组成:主要由送纸单元、印刷单元、开槽单元、模切单元、堆叠单元组成。 2、水性印刷机的种类:低档型、中档型、高档型。 二、水性印刷机各部位名称及功能 ◆中档上印带开槽模切机构造原理图 1、工作原理: 此类型机是采用后踢式送纸(或前缘吸附滚轮摩擦方式),利用每个机组单元的带纸压轮传送瓦楞纸板;在纸板传送过程中,纸板的面纸与印刷滚筒上的印版相接触,通过压印辊和印版的压力印刷出图文后,进入压线开槽和模切单元作业,最终成纸箱未接合形状。 2、送纸单元各部位名称及功能: 送纸单元主要由:前、后、左、右挡板,推板,吸风装置,除尘毛刷和上、下送纸胶辊构成。 3、印刷单元各部位名称及功能: 印刷单元主要由:胶辊、网纹辊、印刷辊、底压辊、带纸压轮和输墨装置构成。 4、开槽单元各部位名称及功能: 开槽单元主要由:预压线轮、压线轮和开槽刀轮构成。 5、模切单元各部位名称及功能: 模切单元主要由:模版辊、砧垫辊、修磨装置和带纸压轮构成。 6、堆叠单元各部位名称及功能: 堆叠单元主要由:接纸臂、输送台和收纸台构成。 ◆高档下印带开槽模切机构造原理图 1、工作原理: 此类机型是采用前缘吸附滚轮摩擦方式送纸,利用每个印刷单元的真空吸附系统,将所要生产的瓦楞纸板背面平整的吸附在传送小轮上,在纸板传送过程中,纸板的面纸与印刷滚筒上的印版相接触,通过压印辊和印版的压力印刷出图文后进入干燥单元,干燥单元配有的干燥装置将对纸板表面的水墨进行干燥,最后进入压线开槽和模切单元作业成纸箱未接合形状。 2、送纸单元各部位名称及功能:
送纸单元主要由:前、后、左、右挡板,前缘送纸机构,吸风装置,除尘毛刷和上、下送纸胶辊构成。 3、印刷单元各部位名称及功能: 印刷单元主要由:腔式刮刀(或胶辊)、网纹辊、印刷辊、压印辊、真空吸附机构、传送小轮和输墨装置构成。 4、干燥单元各部位名称及功能: 干燥单元主要由:真空吸附机构、传送小轮和干燥装置(热风装置、红外线装置等)构成。 5、开槽单元各部位名称及功能: 开槽单元主要由:预压线轮、压线轮和开槽刀轮构成。 6、模切单元各部位名称及功能: 模切单元主要由:模版辊、砧垫辊、修磨装置和带纸压轮构成。 7、堆叠单元各部位名称及功能: 堆叠单元主要由:震动接纸臂、输送台和收纸台构成。 三、揭开网纹辊的神秘面纱 1、网纹辊的作用:定量均匀的向印版传递油墨。 2、网纹辊分为“金属网纹辊”和“陶瓷网纹辊”两大类。 3、金属网纹辊的特点: ①制造成本低;②适合印刷普通文字、线条和实地;③加工速度慢,加工精度低;④网墙宽阔,网孔形状一般为菱形;⑤网穴排列角度为45°;⑥网纹辊线数较低;⑦耐磨性差、使用寿命短。 4、陶瓷网纹辊的特点: ①陶瓷层化学稳定性好,辊面耐腐蚀性佳,使用寿命长;②网穴平滑,载墨量大,传墨性好;③蜂巢形网穴排布,且网穴墙壁薄细坚硬,可获得较均匀的水墨墨层,图文色调再现性好;④能加工成高网线数,改善印刷精美度,并可抑制网点扩大现象。 5、网纹辊网穴的形状: 网穴(也称网孔)是指在网纹辊辊体表面上,雕刻出形状一致、分部均匀的细小凹孔。其形状有斜齿形、四棱锥形、六棱锥形、四棱台型和六棱台型等。目前被广泛采用的网穴形状多是六棱台形的。 6、网纹辊网穴结构: ◆单个网穴的结构: 网穴开口:表示网纹辊表面单个细小网孔的宽度; 网穴深度:表示网纹辊表面单个细小网孔的深度; 网墙:表示相邻两个网孔之间的隔离距离。 7、载墨量:网纹辊网穴储存水墨的能力,单位为BCM/in2。 8、传墨量:水墨自网纹辊网穴中转移到印版的能力,单位为BCM/in2。 9、网纹辊的线数与传墨性能的关系:网纹辊的线数是指单位长度里的网线的线数,单位为线/英寸(LPI 或Lin)或线/厘米(LPCM或L/cm)。网纹辊的线数决定着:传墨量的大小;传墨量的均匀性。 10、网纹辊的日常保养技巧 ◆要注重的细节 ①保持设备的清洁干净;②使用干净的水性油墨;③保证擦版布的干净;④注意原纸的质量;⑤严禁对网纹辊进行刮、碰、撞。 ◆做好网纹辊的清洁工作 1)、日常清洗 ①要有足够的清洗时间;②用铜刷(金属网纹辊)或钢刷(陶瓷网纹辊)进行清洗;③用洗机水或专用网纹辊清洗液清洗。 2)、定期清洗 ①使用网纹辊专用清洗液进行清洗;②低压喷射清洗法;③超声波清洗法;④化学溶剂浸泡法。3)、其他方面 ①使用干净的水清洗网纹辊;②定期清洁夹持刮刀的金属板;③防止网纹辊靠近热源。 11、网纹辊的检查方法:①外观检查②用放大镜检查网穴
摄像头的工作原理说明加电路图
摄像头的工作原理说明加电路图 随着中国网络事业的发展(直接的说,电脑的外部环境的变化→宽带网络的普及),大家对电脑摄像头的需求也就慢慢的加强。比如用他来处理一些网络可视电话、视频监控、数码摄影和影音处理等。话说回来,由于其的相对价格比较低廉(数码摄象机、数码照相机),技术含量不是太高,所以生产的厂家也就多了起来,中国市场就是如此,产品的质量和指标也就有比较大的差距。 一、首先来看看感光材料 一般市场上的感光材料可以分为:(电荷耦合)和(金属氧化物)两种。前一种的优点是成像像素高,清晰度高,色彩还原系数高,经常应用在高档次数码摄像机、数码照相机中,缺点是价格比较昂贵,耗功较大。后者缺点正好和前者互普,价格相对低廉,耗功也较小,但是,在成像方面要差一些。如果你是需要效果好点的话,那么你就选购元件的,但是你需要的¥就多一点了! 二、像素也是一个关键指标 现在市面上主流产品像素一般在万左右,早些时候也出了一些万左右像素的产品,由于技术含量相对较低效果不是很好,不久就退出历史舞台了。这个时候也许有人会问,那是不是像素越高越好呢?从一般角度说是的。但是从另一个方面来看也就不是那么了,对于同一个画面来说,像素高的产品他的解析图象能力就更高,呵呵,那么你所需要的存储器的容量就要很大了。不然……我还是建议如果你选购的时候还是选购市面上比较主流的产品。毕竟将来如果出问题了保修也比较好。 三、分辨率是大家谈的比较多的问题 我想我没有必要到这里说分辨率这个东东了,大家最熟悉的应该就是: :你的显示器什么什么品牌的。分辨率可以上到多高,刷新率呢? :呵呵,还好了,我用在* ,设计的时候就用在*。玩游戏一般就*了。 但是摄像头的分辨率可不完全等同于显示器,切切的说,摄像头分辨率就是摄像头解析图象的能力。现在市面上较多的的一般在*,有是也会在*。但是如果是的一般还要高些。 四、是摄像头,当然也要比较摄像的效果 摄像头的视频捕获能力是用户最关心的了,目前电脑摄像头所能够捕捉都是通过软件来实现的,因此对电脑要求比较高,一般情况下*他的速度可以到达帧,但当分辨率在*的状态下,速度稍微一快点。因而,自己在选购是,可以按照自己的作用选择一个合适自己的。 五、镜头是一个大问题 估计这么东东很多用户在购买的时候会忽视掉,但这却是摄像头对光线的最重要部位。光圈的大小、镜头可调焦的范围等等。一般按照材料分主要有中,有玻璃镜片;塑胶镜片和化合物的,这里最好的要算是玻璃的,他的通光系数大,一般好的镜头他的通光口径也会做的较大,在光线不是很好的时候也可以得到交好的效果,但是价格要高点(一分钱一分货)。塑胶的通光要差点,但是价格便宜,就这点也得到了一些中低端用户的认可。化合物的市面上不是很多,这里就不做详细介绍了。 六、其他数据
AF摄像头工作模式原理
AF摄像头工作模式原理 AF(Auto Focus)自动对焦:自动对焦有两种方式,根据控制原理分为主动式和被动式两种。主动式自动对焦通过相机发射红外线,根据反射回来的射线信号确定被摄体的距离,再自动调节镜头,实现自动对焦。被动式对焦有一点仿生学的味道,是分析物体的成像判断是否已经聚焦,比较精确,但技术复杂,成本高,而且在低照度条件下难以准确聚焦,多用于高档专业相机。一些高智能相机还可以锁定运动的被摄体甚至眼控对焦。 有的手机平台上引出的GPIO口控制或者是Sensor中集成的AF算法,不需要单独使用MCU,有的手机平台是靠MCU集成AF算法,比如MTK的6228。Sensor 的AF算法是在ISP(DSP)的fireware里面的,就是MCU. 对于Sensor带有AF功能的一般通过I2C下命令就行了。手机平台如果是采用IO口控制的话,软件必须有AF的算法,根据图像的清晰度通过IO口控制马达的驱动IC使VCM或者Step(步进电机)动作。 实际上和音圈的原理是一样的,首先对马达供给有低到高的直流电VCM的转子由低到高走完全程,在走的过程中使用IC读取SENSOR固定位置上的亮度数值并记录实时电流数值,到达顶端后在供给马达在sensor亮度值最高时的电压,用VC开发会比较快。镜头直接就可以拧进VCM马达的镜头槽中的,在你给VCM 进行控制时可以有两种控制方式一种时PWm控制方式,还有的是IIC的控制方
式,在控制信号输入到驱动芯片时,驱动信号便发出电流来驱动VCm马达,使VCm马达机构上下移动,所以就实现了自动对焦的目的。 基于DSP的自动对焦系统,自动对焦技术是计算机视觉和各类成像系统的关键技术之一,在国外AF技术已经非常普遍,照相机、摄像机、显微镜、内窥镜等成像系统中有着广泛的用途。在我们国家这个方面应用比较少。传统的自动对焦技术较多采用测距法,即通过测出物距,由镜头方程求出系统的像距或焦距,来调整系统使之处于准确对焦的状态。随着现代计算技术的发展和数字图像处理理论的日益成熟,自动对焦技术进入一个新的数字时代,越来越多的自动对焦方法基于图像处理理论对图像有关信息进行分析计算,然后根据控制策略驱动电机,调节系统使之准确对焦。 本文利用数字式CMOS图像传感器作为感像器件,运用DSP芯片采集图像信息并计算系统的对焦评价函数,根据优化的爬山搜索算法控制驱动步进电机,调节系统光学镜头组的位置,使系统成像清晰,从而实现自动对焦。这是一种数字式的自动对焦方法,其准确性和实时性使其在视频展示台和显微镜等设备中的应用具有广泛的前景。
中学无线网络覆盖项目需求
中学无线网络覆盖项目需求特别申明: 一旦中标,供应商必须严格按合同规定的型号规格、技术指标及交货时间供货,凡与合同有差异的,使用单位可拒绝接受,由此而产生的后果由供应商自负,因此给使用单位造成的损失也由供应商负责。中标方不得擅自拆封原厂商包装,须在使用单位监督之下现场拆封,并在规定时间内将设备安装调试完毕交付使用单位。 *项目需求说明: 1项目概述 1.1现状概述 学校已建设无线网络,本次无线网络则主要在其办公区、科技类、教学区以及教学相关的活动区域进行无线点位增补。 1.2网络拓扑 如上图所示,采用层次化结构设计原则,分为核心层、汇聚层、接入层、及无线AP。 拓扑中核心与无线控制器属于原有网络设备,面POE交换机无线AP为增加网络设备,无线控制器旁挂核心一侧。 新增POE接入交换机部署在楼层配电间中,千兆光上行到汇聚交换机,并千兆电口与无线AP互联,无线AP统一受无线控制器管控,集中管理。 2总体建设目标 利用无线网络技术进一步扩展校园网的覆盖范围,使全校师生能够随时随地、方便高效地使用校园网络; ●促进教学和科研发展,进一步拓展研究空间; ●提升校园网络环境,提高管理水平和效率,推动学校信息化建设;
●要覆盖部分一期没有设计的空间,诸如:图书馆、体育场等; ●无线覆盖对于未来教学应用提供相应的技术扩展及接入能力; ●无线教育网络整体运维、维护、方便简洁; 2.1建设原则 本次无线网络则主要在其办公区、教学区以及教学相关的活动区域进行覆盖。 为能够提供优质的无线服务,所有无线信号在室内任何空间信号强度2.4G、5G同时不低于-70dBm,丢包率小于1%。为了达到信号的稳定,同频率、同信道的干扰信号强度不得高于-75dBm。 3整体设计方案原则 将对无线上网用户进行统一认证,提高网络整体安全性。同时为下一步整体教育城域网有线网用户的统一认证做好坚实的准备工作。 3.1WIFI覆盖标准 对学校的无线系统进行接入认证平台,提升宁波市无线教育网的覆盖范围以及提供更为安全可靠的无线校园网。 针对学校教学应用中大型应用的跟进,在部分学校的教室、报告大厅等场景部署一个高密度型AP,以提供PAD、笔记本等移动终端同时上网、流畅点播高清视频,以保证教学的进行,根据实际堪点功能需求分析,教学楼等主要楼宇单AP容积用户数需达到100接入用户数,才能满足日常教学的应用以及将来的大型应用的部署。在AP选型上,应选用单AP同时拥有三射频卡,同时支持一个2.4GHz加两个5GHz频段,以减少无线信号的信道干扰。2.4GHz是传统的免费频段,可用的信号少,干扰多,最高能力支持802.11n,速率低于450Mbps。5GHz非干扰信道数量比2.4GHz多两倍,可以达到最快的802.11ac千兆无线。因此,为了让单个AP达到最大的接入能力,建议选用双5GHz的设计,两个5GHz可以采用不同的非干扰信道,这样可以达到两路802.11ac的千兆接入能力。采用双5GHz的同时兼容老一代的2.4GHz设备,因为老一代的2.4GHz设备目前比例还很高,依然会长期存在。 3.2★全网统一认证 依据《宁波市中小学校园无线网络接入标准》,本次宁波市鄞州中学无线校园项目
摄像头工作原理
JMK MODEL: JK-316 1/4 索尼高清CCD 内置自动变焦、自动光圈镜头 16倍光学变焦镜头 12倍数字变焦 可调视频传输距离(3步骤) 最低照度:0.001 Lux(DSS) RS-485协议and PTZ 控制器接口 监控摄像头的分类 分类包括: 枪形摄像机 半球形摄像机 一体化摄像机 红外摄像机 智能高速球型摄像机 智能中速球型摄像机 数字视频会议摄像机 微型针 从色彩分为:彩色,黑白,彩转黑从外形分为:枪击,半球,球机从原理分为:模拟,数字
摄像头工作原理 摄像头的工作原理大致为:景物通过镜头(LENS)生成的光学图像投射到图像传感器表面上,然后转为电信号,经过A/D(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片(DSP)中加工处理,再通过USB接口传输到电脑中处理,通过显示器就可以看到图像了。 注1:图像传感器(SENSOR)是一种半导体芯片,其表面包含有几十万到几百万的光电二极管。光电二极管受到光照射时,就会产生电荷。 注2:数字信号处理芯片DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过USB等接口传到PC等设备。 DSP结构框架: 1. ISP(image signal processor)(镜像信号处理器) 2. JPEG encoder(JPEG图像解码器) 3. USB device controller(USB设备控制器) 摄像头的构成主要包括主控芯片、感光芯片、镜头和电源。好的电源也是保证摄像头工作的一个方面。 摄像头镜头:五玻镜头是主流 这个问题对于大多数人来说已经不算问题了,笔者提出来也只是仅对小白而言。简单的说镜头是由透镜组成,摄像头的镜头一般是由玻璃镜片或者塑料镜片组成的。玻璃镜头能获得比塑料镜头更清晰的影像。这是因为光线穿过普通玻璃镜片通常只有5%~9%的光损失,而塑料镜片的光损失高达11%~20%。有些镜头还采用了多层光学镀膜技术,有效减少了光的折射并过滤杂波,提高了通光率,从而获得更清晰影像。
变速器同步器工作原理
变速器 一、变速器概述 变速器功用: (1)改变传动比,满足不同行驶条件对牵引力的需要,使发动机尽量工作在有利的工况下,满足可能的行驶速度要求。 (2)实现倒车行驶,用来满足汽车倒退行驶的需要。 (3)中断动力传递,在发动机起动,怠速运转,汽车换档或需要停车进行动力输出时,中断向驱动轮的动力传递。 变速器分类: (1)按传动比的变化方式划分,变速器可分为有级式、无级式和综合式三种。 (a)有级式变速器:有几个可选择的固定传动比,采用齿轮传动。又可分为:齿轮轴线固定的普通齿轮变速器和部分齿轮(行星齿轮)轴线旋转的行星齿轮变速器两种。 (b)无级式变速器:传动比可在一定范围内连续变化,常见的有液力式,机械式和电力式等。 (c)综合式变速器:由有级式变速器和无级式变速器共同组成的,其传动比可以在最大值与最小值之间几个分段的范围内作无级变化。 (2)按操纵方式划分,变速器可以分为强制操纵式,自动操纵式和半自动操纵式三种。 (a)强制操纵式变速器:靠驾驶员直接操纵变速杆换档。 (b)自动操纵式变速器:传动比的选择和换档是自动进行的。驾驶员只需操纵加速踏板,变速器就可以根据发动机的负荷信号和车速信号来控制执行元件,实现档位的变换。 (c)半自动操纵式变速器:可分为两类,一类是部分档位自动换档,部分档位手动(强制)换档;另一类是预先用按钮选定档位,在采下离合器踏板或松开加速踏板时,由执行机构自行换档。 二、普通齿轮变速器 普通齿轮变速器主要分为三轴变速器和两轴变速器两种。它们的特点将在下面的变速器传动机构中介绍。 变速器传动机构: (1)三轴变速器这类变速器的前进档主要由输入(第一)轴、中间轴和输出(第二)轴组成。 (2)两轴变速器这类变速器的前进档主要由输入和输出两根轴组成。 三轴五档变速器有五个前进档和一个倒档,由壳体、第一轴(输入轴)、中间轴、第二轴(输
高速摄像机工作原理及应用
高速摄像机是一种能够以小于1/1000秒的曝光或超过每秒250帧的帧速率捕获运动图像的设备。高速摄像机用于将快速移动的物体作为照片图像记录到存储介质上。录制后,存储在媒体上的图像可以慢动作播放。早期的高速摄像机使用胶片记录高速事件,但被完全使用电荷耦合器件(CCD)或CMOS有源像素传感器的电子设备取代,通常每秒超过1000帧记录到DRAM上,慢慢地回放研究瞬态现象的科学研究动作。 摄像机种类繁多,其工作的基本原理都是一样的:把光学图象信号转变为电信号,以便于存储或者传输。当我们拍摄一个物体时,此物体上反射的光被摄像机镜头收集,使其聚焦在摄像器件的受光面(例如摄像管的靶面)上,再通过摄像器件把光转变为电能,即得到了“视频信号”。光电信号很微弱,需通过预放电路进行放大,再经过各种电路进行处理和调整,最后得到的标准信号可以送到录像机等记录媒介上记录下来,或通过传播系统传播或送到监视器上显示出来。
高速摄像机可以在很短的时间内完成对高速目标的快速、多次采样,当以常规速度放映时,所记录目标的变化过程就清晰、缓慢地呈现在我们眼前。高速摄像机技术具有实时目标捕获、图像快速记录、即时回放、图像直观清晰等突出优点。 工作原理 高速运动目标受到自然光或人工辅助照明灯光的照射产生反射光,或者运动目标本身发光,这些光的一部分透过高速成像系统的成像物镜。经物镜成像后,落在光电成像器件的像感面上,受驱动电路控制的光电器件,会对像感面上的目标像快速响应,即根据像感面上目标像光能量的分布,在各采样点即像素点产生响应大小的电荷包,完成图像的光电转换。带有图像信息的各个电荷包被迅速转移到读出寄存器中。读出信号经信号处理后传输至电脑中,由电脑对图像进行读出显示和判读,并将结果输出。因此,一套完整的高速成像系统由光学成像、光电成像、信号传输、控制、图像存储与处理等几部分组成。 高速摄像在流体力学中的应用 高速摄像在工业应用中应用广泛,高速摄像机能拍摄到肉眼无法看清楚的图像和运动过程。流体力学中的湍流、流体的流速、流场、气泡、沸腾、两相流等运动规律的观察和分析更是少不了高速摄像机的参与。如用高速摄像拍摄的石头进入水中一刹那的细节。通过高速摄像机影像,研究人员能够了解石头水下的受力情况,并通过流体动力学,分析出为何石头能在水面上连续多次漂浮。 武汉中创联达科技有限公司,专业从事光电子影像产品(低照度相机、高速摄像机,超高速摄像机,高分辨率相机及其图像分析软件)的销售、研发,提供特殊环境下的拍摄、成像服务。经过多年的市场经验及技术积累,公司为国内
摄像头工作原理
摄像头的工作原理大致为:景物通过镜头(LENS)生成的光学图像投射到图像传感器表面上,然后转为电信号,经过A/D(模数转换)转换后变为数字图像信号,再送到数字信号处理芯片(DSP)中加工处理,再通过USB 接口传输到电脑中处理,通过显示器就可以看到图像了。 注1:图像传感器(SENSOR)是一种半导体芯片,其表面包含有几十万到几百万的光电二极管。光电二极管受到光照射时,就会产生电荷。 注2:数字信号处理芯片DSP(DIGITAL SIGNAL PROCESSING)功能:主要是通过一系列复杂的数学算法运算,对数字图像信号参数进行优化处理,并把处理后的信号通过USB等接口传到PC等设备。 DSP结构框架: 1. ISP(image signal processor)(镜像信号处理器) 2. JPEG encoder(JPEG图像解码器) 3. USB device controller(USB设备控制器) 摄像头的构成主要包括主控芯片、感光芯片、镜头和电源。好的电源也是保证摄像头工作的一个方面。摄像头镜头:五玻镜头是主流 这个问题对于大多数人来说已经不算问题了,笔者提出来也只是仅对小白而言。简单的说镜头是由透镜组成,摄像头的镜头一般是由玻璃镜片或者塑料镜片组成的。玻璃镜头能获得比塑料镜头更清晰的影像。这是因为光线穿过普通玻璃镜片通常只有5%~9%的光损失,而塑料镜片的光损失高达11%~20%。有些镜头还采用了多层光学镀膜技术,有效减少了光的折射并过滤杂波,提高了通光率,从而获得更清晰影像。
然而,现在很多小厂,为了节约成本、追求高利润,往往减少镜片的数量,或者使用廉价的塑料镜头。虽然这些产品在价格上便宜不少,看上去很有吸引力,但实际的成像效果却实在是令人无法恭维。现在市面上大多数摄像头采用的都是五玻镜头,但是不乏少数商家将塑料镜头说成五玻镜头的。因此消费者在选购一些杂牌摄像头时,一定要详细试用一下,谨防上当受骗。 另外,镜头还有一个重要的参数那就是光圈,通过调整光圈可以控制通过镜头到达传感器的光线的多少,除了控制通光量,光圈还具有控制景深的功能,即光圈越大,则景深越小 摄像头感光器件:CCD一定比CMOS好吗? 在选择摄像头时,镜头是很重要的。按感光器件类别来分,现在市场上摄像头使用的镜头大多为CCD 和CMOS两种,其中CCD(Charge Coupled Device,电荷耦合组件)因为价格较高更多是应用在摄像、图象扫描方面的高端技术组件,CMOS(Complementary Metal-Oxide Semiconductor,附加金属氧化物半导体组件)则大多应用在一些低端视频产品中。
Smart Link configure guide
Table of Contents 1 Smart Link Configuration Commands·····································································································1-1 Smart Link Configuration Commands·····································································································1-1 display smart-link flush····················································································································1-1 display smart-link group···················································································································1-2 flush enable·····································································································································1-3 port···················································································································································1-3 port smart-link group························································································································1-4 preemption delay·····························································································································1-5 preemption mode·····························································································································1-6 protected-vlan··································································································································1-7 reset smart-link statistics·················································································································1-8 smart-link flush enable·····················································································································1-8 smart-link group·······························································································································1-9