NGWN行星齿轮传动系统设计与分析
NGW型行星齿轮减速器——行星轮的设计
目录 一.绪论 (3) 1.引言 (3) 2.本文的主要内容 (3) 二.拟定传动方案及相关参数 (4) 1.机构简图的确定 (4) 2.齿形与精度 (4) 3.齿轮材料及其性能 (5) 三.设计计算 (5) 1.配齿数 (5) 2.初步计算齿轮主要参数 (6) (1)按齿面接触强度计算太阳轮分度圆直径 (6) (2)按弯曲强度初算模数 (7) 3.几何尺寸计算 (8) 4.重合度计算 (9) 5.啮合效率计算 (10) 四.行星轮的的强度计算及强度校核 (11) 1.强度计算 (11) 2.疲劳强度校核 (15) 1.外啮合 (15) 2.内啮合 (19) 3.安全系数校核 (20)
五.零件图及装配图 (24) 六.参考文献 (25)
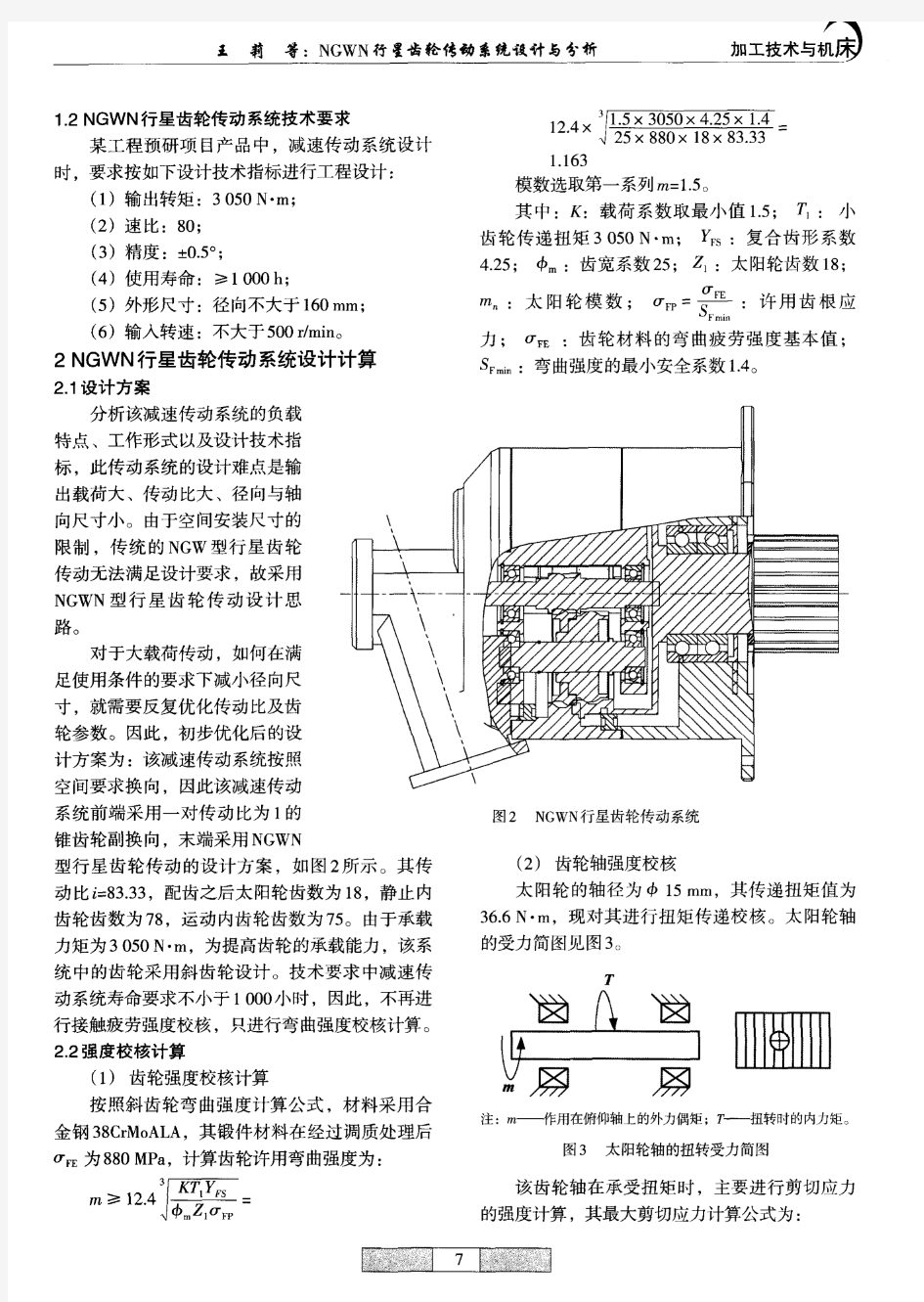
一.绪论 1.引言 渐开线行星齿轮减速器是一种至少有一个齿轮绕着位置固定的几何轴线作圆周运动的齿轮传动,这种传动通常用内啮合且多采用几个行星轮同时传递载荷,以使功率分流。渐开线行星齿轮传动具有以下优点:传动比范围大、结构紧凑、体积和质量小、效率普遍较高、噪音低以及运转平稳等,因此被广泛应用于起重、冶金、工程机械、运输、航空、机床、电工机械以及国防工业等部门作为减速、变速或增速齿轮传动装置。 渐开线行星齿轮减速器所用的行星齿轮传动类型很多,按传动机构中齿轮的啮合方式分为:NGW、NW、NN、NGWN、ZU飞VGW、W.W等,其中的字母表示:N—内啮合,W—外啮合,G—内外啮合公用行星齿轮,ZU—锥齿轮。 NGW型行星齿轮传动机构的主要特点有: 重量轻、体积小。在相同条件下比硬齿面渐开线圆柱齿轮减速机重量减速轻1/2以上,体积缩小1/2—1/3; 传动效率高; 传动功率范围大,可由小于1千瓦到上万千瓦,且功率越大优点越突出,经济效益越高; 装配型式多样,适用性广,运转平稳,噪音小; 外齿轮为6级精度,内齿轮为7级精度,使用寿命一般均在十年以上。 因此NGW型渐开线行星齿轮传动已成为传动中应用最多、传递功率最大的一种行星齿轮传动。 2.本文的主要内容 NGW型行星齿轮传动机构的传动原理:当高速轴由电动机驱动时,带动太阳轮回转,再带动行星轮转动,由于内齿圈固定不动,便驱动行星架作输出运动,行星轮在行星架上既作自转又作公转,以此同样的结构组成二级、三级或多级传动。NGW型行星齿轮传动机构主要由太阳轮、行星轮、内齿圈及行星架所组成,
单级圆柱齿轮减速器的高速级齿轮传动设计
优秀设计 单级圆柱齿轮减速器的高速级齿轮传动设计
目录 一、传动方案的拟定及电动机的选择 (2) 二、V带选择 (4) 三.高速级齿轮传动设计 (6) 四、轴的设计计算 (9) 五、滚动轴承的选择及计算 (13) 六、键联接的选择及校核计算 (14) 七、联轴器的选择 (14) 八、减速器附件的选择 (14) 九、润滑与密封 (15) 十、设计小结 (16) 十一、参考资料目录 (16)
数据如下: 已知带式输送滚筒直径320mm ,转矩T=130 N ·m ,带速 V=1.6m/s ,传动装置总效率为?=82%。 一、拟定传动方案 由已知条件计算驱动滚筒的转速n ω,即 5.953206 .1100060100060≈??=?= π πυωD n r/min 一般选用同步转速为1000r/min 或1500r/min 的电动机作为原动机,因此传动装置传动比约为10或15。根据总传动比数值,初步拟定出以二级传动为主的多种传动方案。 2.选择电动机 1)电动机类型和结构型式 按工作要求和工作条件,选用一般用途的Y (IP44)系列三相异步电动机。它为卧式封闭结构。 2)电动机容量 (1)滚筒输出功率P w kw n T 3.19550 5.951309550P =?=?= ωω (2)电动机输出功率P kw d 59.1% 823 .1P P == = η ω 根据传动装置总效率及查表2-4得:V 带传动?1=0.945;滚动轴承?2 =0.98;圆柱齿轮传动 ?3 =0.97;弹性联轴器?4 =0.99;滚筒轴滑动轴承?5 =0.94。 (3)电动机额定功率P ed 由表20-1选取电动机额定功率P ed =2.2kw 。
行星齿轮的注塑模具设计
引言 伴随着全世界范围内机械加工技术的发展和计算机技术的进步,模具工业已是高新技术产业化的重要领域。例如,在电子产品生产中,制造集成电路的引线框架的精密级进冲模和精密的集成电路塑封模,计算机的机壳、插件和许多元件器件的制造中的精密塑料模具、精密冲压模具等,都是产品生产不可或缺的工具装备。精密模具已使模具行业成为一个与高新技术产品互为依托的产业。1996年至2002年间,我国模具制造业的产值年平均增长14%左右,2003年增长25%左右,沿海一带城市的增长在25%以上。而近几年来,我国模具技术有了很大发展,模具技术有了很大的提高。生产的模具有些已接近或达到国际水平。大型、精密、复杂、高效和长寿命模具又上了新台阶。 虽然在很多方面我国的模具有了很大的发展,但仍有很比较突的问题。目前模具设计及模具制造大都依靠设计的经验进行设计。模具的好坏完全由个人的平时累计的经验控制。这样使得模具设计的周期长,效率低且模具的质量也难以保证。模具工业除需要“高技艺”的从业人员外,还需要更多的“高技术”来保证。本文就是以提高模具设计效率,缩短设计周期,降低模具成本,保证模具质量为目的,试探性的研究三维技术在冲压模具中的应用与开发。 1
2 绪论 2.1模具概述 塑料,Plastic,是以高分子合成树脂为主要成分,在一定的温度和压力下,可塑成一定形状且在常温下保持形状不变的材料。 模具,mould,是利用其特定形状去成型具有一定形状和尺寸的制品的工具。 成型塑料制品的模具叫做塑料模具。对塑料模具的全面要求是:能生产出在尺寸精度、外观、物理性能等各方面均能满足使用要求的优质制品。从模具使用的角度,要求高效率、自动化、操作简便;从模具制造的角度,要求结构合理、制造容易、成本低廉。 注射成型生产中使用的模具称为注射成型模具,简称注射模,也称为注塑模。注射模主要适用于热塑性塑料的成型加工,近年来也逐渐用于加工部分热固性塑料塑料制件。注射模具有很多优点,如对塑料的适应性较广,塑料制件的外观质量较好,生产效率特别高,易于实现自动化生产等,广泛用于塑料制件的生产中。 注射模具的结构由塑件的复杂程度及注射机的结构形式等因素决定。注射模具可分为动模和定模两大部分,定模部分安装在注射机的固定模板上,动模部分安装在注射机的移动模板上,注射时动模与定模闭合构成浇注系统和型腔,开模时动模与定模分离,由推出机构推出塑品。 根据模具上各个零部件所起的作用注塑模具一般有以下几部分组成:定模机构、动模机构、浇注系统、导向装置、顶出机构、抽芯机构、冷却和加热装置、排气系统等。 注塑成型全过程分为:塑化过程、充模过程、冷却凝固过程、脱模过程,由这四个过程就形成了一个循环,完成了一次成型一个乃至数十个塑件的过程。 1.1.1我国模具业存在的问题 1、模具水平落后 在模具制造水平上,虽然我国有些设备已达到或接近世界先进水平,但总体上要比德、美、日、法、意等,发达国家落后许多。国内模具的使用寿命只有国外发达国家的1/2至1/10,甚至更短。模具生产周期却比国际先进水平长许多。此外,开发
齿轮传动强度计算例题01
同济大学《机械设计》 JXSJ 51 直齿圆柱齿轮传动例题: 如图设计带式输送机减速器的高速级齿轮传动。已知输入功率P 1=40KW ,小齿轮转速n 1=960r/min,齿数比u=3.2,由电动机驱动,工作寿命15年(每年 工作300天),两班制,带式运输机工作平稳,转向不变。 解: 1. 选择齿轮类型、材料、精度等级和齿数 1) 选用直齿轮。 2) 材料:考虑到功率较大,大小齿轮均用硬齿面. 3) 材料为40Cr ;调质后表面淬火,齿面硬度为48~55HRC. 4) 选取精度等级:初取7级精度 5) 齿数:Z1=24;Z2=uZ1=77 2. 按齿面接触疲劳强度设计 1)设计公式: 2)确定各参数值 (1) 初取K t =1.3 (2) 转矩 T 1=95.5×105P/n 1=95.5×105×40/960=3.98×105N·m (3) 选取齿宽系数. ψd =0.9 (4) 弹性影响系数. ZE=189.8Mpa1/2 (5) 许用应力 a) 接触疲劳强度极限 σHlim = σHlim1= σHlim2=1170Mpa b)应力循环次数: N 1=60n 1γL h =60?960?1?(2?8?300?15)=4.147?109 N 2=N 1/u=4.147?109/3.2=1.296?109 c)寿命系数:K N1=0.88 K N2=0.90 d)许用安全系数 [s]=1 e)许用应力: [σHlim1]= K N1σHlim1/s=0.88?1170/1=1030Mpa [σHlim2]= K N2σHlim1/s=0.9?1170/1=1053Mpa [σHlim ]= [σHlim1]=1030Mpa (6) 初算直径 3)修正计算 (1) 速度: v=πd 1n 1/60?1000=3.14?68.39?960/60?1000=3.44(m/s) (2) 齿宽 b=ψd d 1t =0.9?68.39=61.55mm (3) 计算齿宽与齿高之比 模数:m t =d 1t/Z 1=68.39/24=2.85 齿高:h=2.25m t =2.25?2.85=6.413 b/h=61.55/6.413=9.6 (4) 计算载荷系数 a)动载系数 K v =1.12 b)使用系数 K A =1 b) 齿间载荷分配系数 设K A F t /b ≥100N/mm 则:K H α=K F α=1.1 c) 齿向载荷分布系数:K H β=1.43,K F β=1.37 载荷系数: K H =K A K V K H β K F β=1?1.12?1.1?1.43=1.72 K F = K A K V K H β K F β=1?1.12?1.1?1.37=1.69 (5) 修正分度圆: (6) 计算模数m m=d 1/Z 1=75.08/24=3.128mm 2.按齿面弯曲疲劳强度设计 1) 计算公式 2) 确定公式内的各参数值 (1) K F =1.69;T 1=3.98?105;ψd =0.9;Z 1=24 (2) 许用应力 a) 极限应力: σF1=σF2=680Mpa b) 寿命系数: K FN1=0.88;K FN2=0.90 c) 安全系数:S=1.4 d) 许用应力: [σF1]=K FN1σF1/S=0.88?680/1.4=427.4Mpa [σF2]=K FN2σF2/S=0.90?680/1.4=437.14Mpa (3) 齿形系数:Y Fa1=2.65;Y Fa2=2.226 (4) 应力校正系数:Y Sa1=1.58;Y Sa2=1.764 (5) 计算Y Fa Y Sa/[σF ] Y Fa1Y Sa1/[σF1]=2.65?1.58/427.4=0.0098 Y Fa2Y Sa2/[σF2]=2.226?1.764/437.14=0.00898 Y Fa Y Sa /[σF ]=0.0098 3) 计算 3. 几何计算 1) 分度圆直径: d 1=75mm ;d 2=mZ 2=3?80=240 2) 模数:由接触疲劳强度和弯曲疲劳强度计算,取m=3mm 3) 齿数:Z 1=d 1/m=75/3=25 Z 2=uZ 1=3.2?25=80 4) 齿轮宽度:b=ψd d 1=0.9?75=67.5mm 取B 1=73mm ;B 2=68mm 5) 验算: F t =2T 1/d 1=2?3.98?105=10613.33N K A F t /b=1?10613.33/68=156.08N/mm>100N/mm 合适 4. 结构设计(略) 1 2 3 4 5 6 7 []3 2 1112 32.2??? ? ??±≥H E d Z u u KT d σψ[])(39.6810308.1892.312.39.0103983.12 32.212 32.2325 3 2 11mm Z u u T K d H E d t t =? ?? ??±???=??? ? ??±≥σψ) (08.753.1/72.139.683311mm K K d d t t =?==[] 32 11 2sa Fa F d Y Y z KT m σψ≥mm m 94.20098.0249.01098.369.1232 5 =?????≥
(完整word版)NGW型行星轮中太阳轮的设计和计算要点
目录 一.绪论 (1) 二.拟定传动方案及相关参数 (3) 1.机构简图的确定 (3) 2.齿形与精度 (3) 3.齿轮材料及其性能 (4) 三.设计计算 (4) 1.配齿数 (4) 2.初步计算齿轮主要参数 (5) 3.几何尺寸计算 (8) 4.重合度计算 (9) 四.太阳轮的强度计算及强度校核 (10) 1.强度计算 (10) (1)外载荷 (12) (2)危险截面的弯矩和轴向力 (12) 2.疲劳强度校核 (14) (1)齿面接触疲劳强度 (14) (2)齿根弯曲疲劳强度 (18) 3.安全系数校核 (21) 五.零件图和装配图 (25) 六.参考文献 (26)
一.绪论 渐开线行星齿轮减速器是一种至少有一个齿轮绕着位置固定的几何轴线作圆周运动的齿轮传动,这种传动通常用内啮合且多采用几个行星轮同时传递载荷,以使功率分流。渐开线行星齿轮传动具有以下优点:传动比范围大、结构紧凑、体积和质量小、效率普遍较高、噪音低以及运转平稳等,因此被广泛应用于起重、冶金、工程机械、运输、航空、机床、电工机械以及国防工业等部门作为减速、变速或增速齿轮传动装置。 渐开线行星齿轮减速器所用的行星齿轮传动类型很多,按传动机构中齿轮的啮合方式分为:NGW、NW、NN、NGWN、ZU飞VGW、W.W等,其中的字母表示:N—内啮合,W—外啮合,G—内外啮合公用行星齿轮,ZU—锥齿轮。 NGW型行星齿轮传动机构的主要特点有: 1、重量轻、体积小。在相同条件下比硬齿面渐开线圆柱齿轮减速机重量减速轻1/2以上,体积缩小1/2—1/3; 2、传动效率高; 3、传动功率范围大,可由小于1千瓦到上万千瓦,且功率越大优点越突出,经济效益越高; 4、装配型式多样,适用性广,运转平稳,噪音小; 5、外齿轮为6级精度,内齿轮为7级精度,使用寿命一般均在十年以上。因此NGW型渐开线行星齿轮传动已成为传动中应用最多、传递功率最大的一种行星齿轮传动。 NGW型行星齿轮传动机构的传动原理:当高速轴由电动机驱动时,带动太阳轮回转,再带动行星轮转动,由于内齿圈固定不动,便驱动行星架作输出运动,行星轮在行星架上既作自转又作公转,以此同样的结构组成二级、三级或多级传动。NGW型行星齿轮传动机构主要由太阳轮、行星轮、内齿圈及行星架所组成,以基本构件命名,
机床主传动系统设计
机床主传动系统设计 多轴箱是组合机床的重要专用部件。它是根据加工示意图所确定的工件加工孔的数量和位置、切削用量和主轴类型设计的传递各主轴运动的动力部件。其动力来自通用的动力箱,与动力箱一起安装于进给滑台,可完成钻扩铰镗孔等加工工序。 通用主轴箱采用标准主轴,借助导向套引导刀具来保证被加工孔的位置精度。 5.1大型主轴箱的组成 大型通用主轴箱由通用零件如箱体、主轴、传动轴、齿轮和附加机构等 组成。有箱体、前盖、后盖、上盖、侧盖等为箱体类零件;主轴、传动 轴、手柄轴、传动齿轮、动力箱或电动机齿轮等为传动类零件;叶片泵、 分油器、注油标、排油塞、油盘和防油套等为润滑及防油元件。 5.2多轴箱通用零件 1.通用箱体类零件箱体材料为HT200,前、后、侧盖等材料为HT150。 多轴箱的标准厚度为180mm,前盖厚度为55mm,后盖厚度为90mm。 2.通用主轴 1)滚锥轴承主轴 2)滚针轴承主轴 3)滚珠轴承主轴:前支承为推力球轴承、后支承为向心球轴承或圆锥滚子 轴承。因推力球轴承设置在前端,能承受单方向的轴向力,适用于钻孔 主轴。 3.通用传动轴 通用传动轴一般用45#钢,调质T235;滚针轴承传动轴用20Cr钢, 热处理S0.5~C59。 4.通用齿轮和套 多轴箱用通用齿轮有:传动齿轮、动力箱齿轮和电机齿轮。 5.3通用多轴箱设计 1.多轴箱设计原始依据图
1) 多轴箱设计原始依据图 图5-1.原始依据图 2) 主轴外伸及切削用量 表5-1.主轴参数表 3) 被加工零件:箱体类零件,材料及硬度,HT200,HB20~400 2. 主轴、齿轮的确定及动力的计算 1) 主轴型式和直径、齿轮模数的确定 主轴的型式和直径,主要取决于工艺方法、刀具主轴联结结构、刀具的进给抗力和切削转矩。钻孔采用滚珠轴承主轴。主轴直径按加工示意图所示主轴类型及外伸尺寸可初步确定。传动轴的直径也可参考主轴直径大小初步选定。 齿轮模数m (单位为mm )按下列公式估算: (30~m ≥=≈1.9(《组合机床设计简明手册》p62)
行星齿轮设计【模板】
第二章 原始数据及系统组成框图 (一)有关原始数据 课题: 一种行星轮系减速器的设计 原始数据及工作条件: 使用地点:减速离合器内部减速装置; 传动比:p i =5.2 输入转速:n=2600r/min 输入功率:P=150w 行星轮个数:w n =3 内齿圈齿数b z =63 第五章 行星齿轮传动设计 (一)行星齿轮传动的传动比和效率计算 行星齿轮传动比符号及角标含义为: 123i 1—固定件、2—主动件、3—从动件 1、齿轮b 固定时(图1—1),2K —H (NGW )型传动的传动比b aH i 为 b aH i =1-H ab i =1+b z /a z 可得 H ab i =1-b aH i =1-p i =1-5.2=-4.2 a z =b z /b aH i -1=63*5/21=15 输出转速: H n =a n /p i =n/p i =2600/5.2=500r/min 2、行星齿轮传动的效率计算: η=1-|a n -H n /(H ab i -1)* H n |*H ψ H ψ=*H H H a b B ψψψ+ H a ψ为a —g 啮合的损失系数,H b ψ为b —g 啮合的损失系数,H B ψ为轴承的损失系数,H ψ 为总的损失系数,一般取H ψ=0.025 按a n =2600 r/min 、H n =500r/min 、H ab i =-21/5可得
η=1-|a n -H n /(H ab i -1)* H n |*H ψ=1-|2600-500/(-4.2-1)*500|*0.025=97.98% (二) 行星齿轮传动的配齿计算 1、传动比的要求——传动比条件 即 b aH i =1+b z /a z 可得 1+b z /a z =63/5=21/5=4.2 =b aH i 所以中心轮a 和内齿轮b 的齿数满足给定传动比的要求。 2、保证中心轮、内齿轮和行星架轴线重合——同轴条件 为保证行星轮g z 与两个中心轮a z 、b z 同时正确啮合,要求外啮合齿轮a —g 的中心距等于内啮合齿轮b —g 的中心距,即 w (a )a g - =()w b g a - 称为同轴条件。 对于非变位或高度变位传动,有 m/2(a z +g z )=m/2(b z -g z ) 得 g z =b z -a z /2=63-15/2=24 3、保证多个行星轮均布装入两个中心轮的齿间——装配条件 想邻两个行星轮所夹的中心角H ?=2π/w n 中心轮a 相应转过1?角,1?角必须等于中心轮a 转过γ个(整数)齿所对的中心角, 即 1?=γ*2π/a z 式中2π/a z 为中心轮a 转过一个齿(周节)所对的中心角。 p i =n/H n =1?/H ?=1+b z /a z 将1?和H ?代入上式,有 2π*γ/a z /2π/w n =1+b z /a z 经整理后γ=a z +b z =(15+63)/2=24 满足两中心轮的齿数和应为行星轮数目的整数倍的装配条件。 4、保证相邻两行星轮的齿顶不相碰——邻接条件 在行星传动中,为保证两相邻行星轮的齿顶不致相碰,相邻两行星轮的中心距应大于两轮齿顶圆半径之和,如图1—2所示
直齿锥齿轮传动计算例题
例题10-3试设计一减速器中的直齿锥齿轮传动。已知输入功率P=10kw,小齿轮转速n1=960r/min,齿数比u=3.2,由电动机驱动,工作寿命15年(设每年工作300天),两班制,带式输送机工作平稳,转向不变。 [解]1.选定齿轮类型、精度等级、材料及齿数 (1)选用标准直齿锥齿轮齿轮传动,压力角取为20°。 (2)齿轮精度和材料与例题10-1同。 (3)选小齿轮齿数z1=24,大齿轮齿数z2=uz1=3.224=76.8,取z2=77。 2.按齿面接触疲劳强度设计 (1)由式(10-29)试算小齿轮分度圆直径,即 1) =1.3 计算小齿轮传递的转矩。 9.948 选取齿宽系数=0.3。 查得区域系数 查得材料的弹性影响系数。 [] 由图 由式( , 由图10-23查取接触疲劳寿命系数 取失效概率为1%,安全系数S=1,由式(10-14)得 取和中的较小者作为该齿轮副的接触疲劳许用应力,即
2)试算小齿轮分度圆直径 (2) 1 3.630m/s ②当量齿轮的齿宽系数 0.342.832mm 2) ①由表查得使用系数 ②根据级精度(降低了一级精度) ④由表 由此,得到实际载荷系数 3)由式(10-12),可得按实际载荷系数算得的分度圆直径为 及相应的齿轮模数 3.按齿根弯曲疲劳强度设计 (1)由式(10-27)试算模数,即
1)确定公式中的各参数值。 ①试选 ②计算 由分锥角 由图 由图 由图查得小齿轮和大齿轮的齿根弯曲疲劳极限分别为 由图取弯曲疲劳寿命系数 ,由式(10-14)得 因为大齿轮的大于小齿轮,所以取 2)试算模数。 =1.840mm
行星齿轮传动设计详解
1 绪论 行星齿轮传动与普通定轴齿轮传动相比较,具有质量小、体积小、传动比大、承载能力大以及传动平稳和传动效率高等优点,这些已被我国越来越多的机械工程技术人员所了解和重视。由于在各种类型的行星齿轮传动中均有效的利用了功率分流性和输入、输出的同轴性以及合理地采用了内啮合,才使得其具有了上述的许多独特的优点。行星齿轮传动不仅适用于高速、大功率而且可用于低速、大转矩的机械传动装置上。它可以用作减速、增速和变速传动,运动的合成和分解,以及其特殊的应用中;这些功用对于现代机械传动发展有着重要意义。因此,行星齿轮传动在起重运输、工程机械、冶金矿山、石油化工、建筑机械、轻工纺织、医疗器械、仪器仪表、汽车、船舶、兵器、和航空航天等工业部门均获得了广泛的应用[1-2]。 1.1 发展概况 世界上一些工业发达国家,如日本、德国、英国、美国和俄罗斯等,对行星齿轮传动的应用、生产和研究都十分重视,在结构优化、传动性能,传动功率、转矩和速度等方面均处于领先地位,并出现一些新型的行星传动技术,如封闭行星齿轮传动、行星齿轮变速传动和微型行星齿轮传动等早已在现代化的机械传动设备中获得了成功的应用。行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。然而,自20世纪60年代以来,我国才开始对行星齿轮传动进行了较深入、系统的研究和试制工作。无论是在设计理论方面,还是在试制和应用实践方面,均取得了较大的成就,并获得了许多的研究成果。近20多年来,尤其是我国改革开放以来,随着我国科学技术水平的进步和发展,我国已从世界上许多工业发达国家引进了大量先进的机械设备和技术,经过我国机械科技人员不断积极的吸收和消化,与时俱进,开拓创新地努力奋进,使我国的行星传动技术有了迅速的发展[1-8]。 1.2 3K型行星齿轮传动 在图4所示的3K型行星齿轮传动中,其基本构件是三个中心轮a、b和e,故其传动类型代号为3K[10]。在3K型行星传动中,由于其转臂H不承受外力矩的作用,所以,它不是基本构件,而只是用于支承行星轮心轴所必需的结构元件,
带式传动机设计
课程设计 题目带式传动机设计 学生姓名 学号 学院机械与汽车工程 专业机械设计制造及其自动化 指导教师 二O一二年十二月二十日
目录 一、设计任务书…………………………………… 二、总体方案设计………………………………… 1.传动方案分析………………………………………………………… 2.选择联轴器的类型和型号…………………………………………… 3.电动机的选择………………………………………………………….4.传动比分配…………………………………………………………….5.传动系统的运动和动力参数………………………………………… 三、传动零件的设计计算…………………………. 1.带传动的设计………………………………………………………….2.齿轮传动的设计……………………………………………………….3.轴的结构设计及计算………………………………………………….4.滚动轴承的选择及校核计算…………………………………………. 5. 键联接的选择及校核计算……………………………………………. 6.减速器附件的选择…………………………………………………. 7.润滑与密封………………………………………………………….
一、 设计任务书 1. 设计题目:带式输送机传动装置(简图如下) 61——V 带传动2——电动机 34——联轴器5——卷筒6——运输带 注:传动不逆转,载荷平稳,起动载荷为名义载荷的1.25倍,输送带速度允许误差为±5% 2.设计工作量: ①.设计说明书1份 ②.减速器装配图1张(A0或A1) ③.零件工作图1~3张 本组设计选第1组数据
二、总体方案设计 1.传动方案分析 在分析传动方案时应试注意常用机械传动方式的特点及在布局上的要求: 1)带传动平稳性好,能缓冲吸振,但承载能力小,宜布置在高速级; 2)链传动平稳性差,且有冲击、振动,宜布置在低速级; 3)蜗杆传动放在高速级时蜗轮材料应选用锡表铜,否则可选用铝铁青铜; 4)开式齿轮传动的润滑条件差,磨损严重,应布置在低速级; 5)锥齿轮、斜齿轮宜放在调整级。 该方案的优点: 该工作机有轻微振动,由于V带有缓冲吸振能力,采用V带传动能减小振动带来的影响,并且该工作机属于小功率、载荷变化不大,可以采用V带这种简单的结构,并且价格便宜、标准化程度高,大幅度降低了成本。 总体来讲,该传动方案满足工作机的性能要求、适应工作条件、工作可靠,此外还结构简单、尺寸紧凑、成本低传动效率高。 2.选择联轴器的类型和型号 一般在传动装置中有两个联轴器:一个是连接电动机轴与减速器高速轴的联轴器,另一个是连接减速器低速轴与工作机轴的联轴器。前者由于所连接轴的转速较高,为了减小起动载荷、缓和冲击,应选用具有较小转动惯量的弹性联轴器,如弹性柱销联轴器等。后者由于所连接轴的转速较低,传递的转矩较大,减速器与工作机常不在同一底座上而要求有较大的轴线偏移补偿,因此常选用无弹性元件的挠性联轴器,例如十字滑块联轴器等。 3.电动机的选择 (1)选择电动机 按已知的工作要求和条件,选用Y132M2—6电动机。 (2)选择电动机功率 工作机所需的电动机输出功率为 P d=P w/η P w=FV/1000ηw 所以P d=FV/1000ηwη 由电动机至工作机之间的总效率(包括工作机效率)为 η·ηw=η1·η2·η3·η4·η5·η 6
(完整word版)行星齿轮减速器设计
1引言 行星齿轮传动在我国已有了许多年的发展史,很早就有了应用。然而,自20 世纪60年代以来,我国才开始对行星齿轮传动进行了较深入、系统的研究和试制工作。无论是在设计理论方面,还是在试制和应用实践方面,均取得了较大的成就, 并获得了许多的研究成果。近20 多年来,尤其是我国改革开放以来,随着我国科学技术水平的进步和发展,我国已从世界上许多工业发达国家引进了大量先进的机械设备和技术,经过我国机械科技人员不断积极的吸收和消化,与时俱进,开拓创新地努力奋进,使我国的行星传动技术有了迅速的发展[1]。 2设计背景 试为某水泥机械装置设计所需配用的行星齿轮减速器,已知该行星齿轮减速器的要求输入功率为p1740KW ,输入转速n1 1000rpm , 传动比为i p 35.5, 允许传动比偏差iP0.1, 每天要求工作16小时,要求寿命为2 年;且要求该行星齿轮减速器传动结构紧凑,外廓尺寸较小和传动效率高。 3设计计算 3.1选取行星齿轮减速器的传动类型和传动简图 根据上述设计要求可知,该行星齿轮减速器传递功率高、传动比较大、工作环境恶劣等特点。故采用双级行星齿轮传动。2X-A 型结构简单,制造方便,适用于任何工况下的大小功率的传动。选用由两个2X-A 型行星齿轮传动串联而成的双级行星齿轮减速器较为合理,名义传动比可分为i p1 7.1, i p2 5进行传动。传动简图如图1所示:
图1 3.2 配齿计算 根据 2X-A 型行星齿轮传动比 i p 的值和按其配齿计算公式,可得第一级传动的内 齿轮 b1, 行星齿轮 c1 的齿数。现考虑到该行星齿轮传动的外廓尺寸,故选取第一级中 心齿轮 a1数为 17 和行星齿轮数为 np 3 。根据内齿轮 z b1 i p1 1 z a1 zb1 7.1 1 17 103.7 103 对内齿轮齿数进行圆整后,此时实际的 P 值与给定的 P 值稍有变化,但是必须控 制在其传动比误差范围内。实际传动比为 i = 1+ za 1 =7.0588 zb 1 其传动比误差 i = ip i = 7.1 7.0588 =5℅ ip 7.1 根据同心条件可求得行星齿轮 c1 的齿数为 所求得的 ZC1适用于非变位或高度变位的行星齿轮传动。再考虑到其安装条件为: 第二级传动比 i p2为 5,选择中心齿轮数为 23 和行星齿轮数目为 3,根据内齿轮 zb1 z c1 z b1 z a1 2 43 za1 zb1 2 C = 40 整数
机械设计基础习题
《机械设计基础》习题 机械设计部分 目录 8 机械零件设计概论 9 联接 10 齿轮传动 11 蜗杆传动 12 带传动 13 链传动 14 轴 15滑动轴承 16 滚动轴承 17 联轴器、离合器及制动器 18 弹簧 19机械传动系统设计 8机械零件设计概论 思考题 8-1 机械零件设计的基本要求是什么? 8-2 什么叫失效?机械零件的主要失效形式有几种?各举一例说明。 8-3 什么是设计准则?设计准则的通式是什么? 8-4 复习材料及热处理问题。复习公差与配合问题。 8-5 什么是零件的工艺性问题?主要包含哪几方面的问题? 8-6 什么是变应力的循环特性?对称循环应力和脉动循环应力的循环特性为多少?8-7 什么是疲劳强度问题?如何确定疲劳极限和安全系数? 8-8 主要的摩擦状态有哪四种? 8-9 磨损过程分几个阶段?常见的磨损有哪几种? 8-10 常见的润滑油加入方法有哪种?
9 联 接 思 考 题 9-1 螺纹的主要参数有哪些?螺距与导程有何不同?螺纹升角与哪些参数有关? 9-2 为什么三角形螺纹多用于联接,而矩形螺纹、梯形螺纹和锯齿形螺纹多用于传动?为 什么多线螺纹主要用于传动? 9-3 螺纹副的自锁条件是什么?理由是什么? 9-4 试说明螺纹联接的主要类型和特点。 9-5 螺纹联接为什么要预紧?预紧力如何控制? 9-6 螺纹联接为什么要防松?常见的防松方法有哪些? 9-7 在紧螺栓联接强度计算中,为何要把螺栓所受的载荷增加30%? 9-8 试分析比较普通螺栓联接和铰制孔螺栓联接的特点、失效形式和设计准则。 9-9 简述受轴向工作载荷紧螺栓联接的预紧力和残余预紧力的区别,并说明螺栓工作时所 受的总拉力为什么不等于预紧力和工作载荷之和。 9-10 简述滑动螺旋传动的主要特点及其应用。 9-11 平键联接有哪些失效形式?普通平键的截面尺寸和长度如何确定? 9-12 为什么采用两个平键时,一般布置在沿周向相隔180°的位置,采用两个楔键时,相 隔90°~120°,而采用两个半圆键时,却布置在轴的同一母线上? 9-13 试比较平键和花键的相同点和不同点。 9-14 简述销联接、焊接、粘接、过盈联接、弹性环联接和成形联接的主要特点和应用场合。 习 题 9-1 试证明具有自锁性螺旋传动的效率恒小于50%。 9-2 试计算M24、M24×1.5螺纹的升角,并指出哪种螺纹的自锁性好。 9-3 图示为一升降机构,承受载荷F =150 kN ,采用梯形螺纹,d = 60 mm ,d 2 = 56 mm ,P = 8 mm ,线数n = 3。支撑面采用推力球轴承,升降台的上下移动处采用导向滚轮,它们的摩擦阻力近似为零。试计算: (1)工作台稳定上升时的效率(螺纹副当量摩擦系数为0.10)。 (2)稳定上升时加于螺杆上的力矩。 (3)若工作台以720 mm/min 的速度上升,试按稳定运转条件求螺杆所需转速和功率。 (4)欲使工作台在载荷F 作用下等速下降,是否需要制动装置?加于螺杆上的制动力矩是多少? 题9-3图 题9-4图 题9-5图 9-4 图示起重吊 钩最大起重 量F = 50 kN ,吊钩材 料为35钢。牵曳力F R F F 导向滚轮 齿轮 制动轮 推力球轴承
同步带传动类型及及设计计算标准
同步带传动类型及及设计计算标准 (GB-T10414?2-2002同步带轮设计标准) 圆弧齿同步带轮轮齿ArctoothTimingtooth 直边齿廓尺寸Dimensionoflineartypepulley
1、同步带轮的型式 2、齿型尺寸、公差及技术参数 3、各种型号同步带轮齿面宽度尺寸表 4、订购须知 圆弧齿轮传动类型: 1)圆弧圆柱齿轮分单圆弧齿轮和双圆弧齿轮。 2)单圆弧齿轮的接触线强度比同等条件下渐开线齿轮高,但弯曲强度比渐开线低。 3)圆弧齿轮主要采用软齿面或中硬齿面,采用硬齿面时一般用矮形齿。圆弧齿轮传动设计步骤: 1)简化设计:根据齿轮传动的传动功率、输入转速、传动比等条件,确定中心距、模数等主要参数。如果中心距、模数已知,可跳过这一
步。 2)几何设计计算:设计和计算齿轮的基本参数,并进行几何尺寸计算。 3)强度校核:在基本参数确定后,进行精确的齿面接触强度和齿根弯曲强度校核。 4)如果校核不满足强度要求,可以返回 圆弧齿轮传动的特点: 1)圆弧齿轮传动试点啮合传动,值适用于斜齿轮,不能用于直齿轮。 2)相对曲率半径比渐开线大,接触强度比渐开线高。 3)对中心距变动的敏感性比渐开线大。加工时,对切齿深度要求较高,不允许径向变位切削,并严格控制装配误差。 单圆弧齿轮传动 小齿轮的凸齿工作齿廓在节圆以外,齿廓圆心在节圆上;大齿轮的凹齿工作齿廓在节圆内,齿廓圆心略偏於节圆以外(图2单圆弧齿轮传动的嚙合情况)。由於大齿轮的齿廓圆弧半径p2略大於小齿轮的齿廓半径p1,故当两齿廓转到K点,其公法线通过节点c时,齿便接触,旋即分离,但与它相邻的另一端面的齿廓随即接触,即两轮齿K1﹑K'1、K2﹑K'2﹑K3﹑K'3……各点依次沿嚙合线接触。因此,圆弧齿轮任一端面上凹﹑凸齿廓仅作瞬时嚙合。一对新圆弧齿轮在理论上是瞬时点嚙合,故圆弧齿轮传动又常称为圆弧点嚙合齿轮传动。轮齿经过磨合后,实际上齿廓能沿齿高有相当长的一段线接触。圆弧齿轮传动的特点是:(1)综合曲率半径比渐开线齿轮传动大很多,其接触强度比渐开线齿轮传动约高0.5~1.5倍;
行星齿轮减速机
行星齿轮减速机
2K-H型双极(负号机构)行星齿轮减速器设计 作者朱万胜 指导教师 左家圣 摘要: 本文完成了对一个2K-H型双级负号机构(NW型)的行星齿轮减速器的结构设计和传动设计。此减速器的传动比是15,而且,它具有体积小、重量轻、结构紧凑、外阔尺寸小及传动功率范围大等优点。首先简要介绍了课题的背景以及对齿轮减速器的概述,减速器是一种动力传达机构,利用齿轮的速度转换器,将马达的回转数减速到所要的回转数,并得到较大转矩的机构。然后根据原始数据及给定的系统传动方案图计算其传动效率 并选择电动机的功效,再然后就是对减速器的核心部分行星齿轮的设计,包括其各个齿轮的齿数、几何参数和配齿计算,最后根据强度理论校核齿轮的强度。然后对各齿轮进行受力分析并进行计算,然后设计计算输出轴输入轴并进行对其强度校核。最后在所有理论尺寸都算出来后绘制其总装配图。
关键字:减速器、行星齿轮、 NW型行星传动2K-H bipolar (negative body) design of planetary gear reducer Abstract: The completion of a two-stage negative bodies (NW-type) structure of the planetary gear reducer design and transmission design. This gear transmission ratio is 15, but it also has a small size, light weight, compact structure, small size and wide outside the scope of the advantages of large transmission power. Subjects were briefly introduced the background and an overview of the gear reducer, speed reducer is a dynamic communication agencies, using the gear, the speed converter, the motor's rotational speed decelerated to the desired rotational speed and get more torque institutions. Then the original data and drive a given system to calculate the transmission efficiency of the program graph and select the motor effect, and then that is a core part of the planetary gear reducer design, including all the gear teeth, with tooth geometry parameters and calculated Finally, according to the intensity of strength theory checking gear. Then the force analysis of each gear and calculated, and then design calculations and the input shaft and output shaft to check its strength. Finally, all theories are calculated size of the total assembly drawing after drawing. Keywords: reducer, planetary gear, NW planetary transmission 目录
一级直齿圆柱齿轮减速器及带传动设计
广州科技贸易职业学院 机电系 课程设计报告机械设计基础课程设计 设计题目:带式输送机传动系统设计 专业班级:07模具A班 学号: 设计人: 指导老师:王春艳 完成日期:2009-5-20
课程设计任务书 设计题目:带式输送机传动系统设计(一级直齿圆柱齿轮减速器及带传动)传动简图: 1.电动机 2.V带 3.减速箱 4.联轴器5滚筒 6.输送带 原始数据: (已知条件) 说明: 1.单向运转,有轻微振动; 2.每年按300个工作日计算,每日工作二班。 完成日期:________年____月_____日 设计指导教师:_________ ______年____月____日 任课教师:__________ __________年____月____日 评分与评语:________________________________ (二)设计内容 1、电动机的选择及运动参数的计算 2、V带的传动设计;
3、齿轮传动的设计; 4、轴的设计; 5、联轴器的选择; 6、润滑油及润滑方式的选择; 7、绘制零件的工作图和装配图 (1)、减速器的装配图 (2)、绘制零件的工作图 注:装配图包括:尺寸标注、技术要求及特性、零件编号、零件明细表、标题栏。 零件的工作图包括:尺寸的标注、公差、精度、技术要求。 10、编写设计说明书 (1)、目录; (2)、设计任务书; (3)、设计计算:详细的设计步骤及演算过程; (4)、对设计后的评价; (5)、参考文献资料。 (三)设计工作量 1.减速器总装图一张 2.零件图二张 3.设计说明一份。
目录 设计任务书……………………………………………………………传动方案说明…………………………………………………………电动机的选择…………………………………………………………传动装置的运动和动力参数…………………………………………传动件的设计计算……………………………………………………轴的设计计算…………………………………………………………联轴器、滚动轴承、键联接的选择…………………………………减速器附件的选择……………………………………………………润滑与密封……………………………………………………………设计小结………………………………………………………………参考资料……………………………………………………………
封闭式行星齿轮减速器的设计毕业论文
封闭式行星齿轮减速器的设计毕业论文 目录 毕业论文设计任务书......................................................... I 开题报告 (Ⅱ) 指导教师审查意见 (Ⅲ) 评阅教师评语 (Ⅳ) 答辩会议记录 (Ⅴ) 中文摘要 (Ⅵ) 英文摘要 (Ⅶ) 1 前言 (1) 1.1设计的目的 (1) 1.2研究本课题的意义 (1) 1.3本课题研究的围 (1) 2 选题背景 (2) 2.1题目来源 (2) 2.2研究目的和意义 (2) 2.3国外现状和发展趋势 (2) 2.4应解决的主要问题 (5) 3 方案论证 (6) 3.1设计要求 (6) 3.2方案得拟定 (6) 3.3行星排级数得选择 (6) 3.4最终方案 (7) 4 设计论述 (9) 4.1总体传动比设计 (9) 4.2封闭式行星齿轮减速器各行星排配齿计算配齿计算 (10) 4.3扭矩的计算 (11) 4.4初步计算齿轮的主要参数 (12) 4.5几何尺寸的计算 (15) 4.6装配条件的验算 (15)
4.7齿轮强度验算 (16) 4.8效率的计算 (30) 4.9输入轴的强度校核 (31) 5 结果分析 (32) 5.1计算结果 (32) 5.2结果分析 (33) 6 有限元分析 (34) 6.1有限元简介 (34) 6.2二级行星架的有限元分析过程 (34) 6.3二级行星架有限元分析结果总结 (34) 7 总结 (37) 参考文献 (37) 致谢 (39)
1 前言 1.1 设计的目的 机械毕业设计是学生学习机械专业进行的一项综合训练,其主要目的是通过毕业设计使学生巩固、加深在四年机械课程学习中学到的知识,提高学生综合运用这些知识去分析和解决问题的能力。同时学习机械设计的一般方法,了解和掌握常用机械零部件、机械传动装置和简单机械的设计方法与步骤。 本课题研究的主要问题是电动葫芦中行星齿轮该减速器的设计,针对行星齿轮的结构设计,从而达到优化电动葫芦的结构。研究本课题的目的是使电动葫芦达到体积小,自重轻,结构紧凑,承载能力强,传动效率高,减速器得传动比较大和使用寿命长的目的。 1.2 研究本课题的意义 电动葫芦是工厂、矿山、港口、仓库、货场、商店等常用的起重设备之一,是提高劳动效率,改善劳动条件,实现工业自动化,提高效率,减轻劳动强度的重要工具。因而研究电动葫芦对减轻工人劳动强度、提高劳动效率、提高企业自动化程度、降低生产成本等具有重要的意义。 1.3 本课题研究的围 本次设计主要研究的围是钢丝绳电动葫芦。本次设计的封闭式行星齿轮减速器主要应用于钢丝绳电动葫芦。