智能灌溉系统的研究与设计.
毕业设计(论文)题目智能灌溉系统的研究与设计
教学点
专业
年级
姓名
指导教师
定稿日期:2011 年6月1 日
摘要
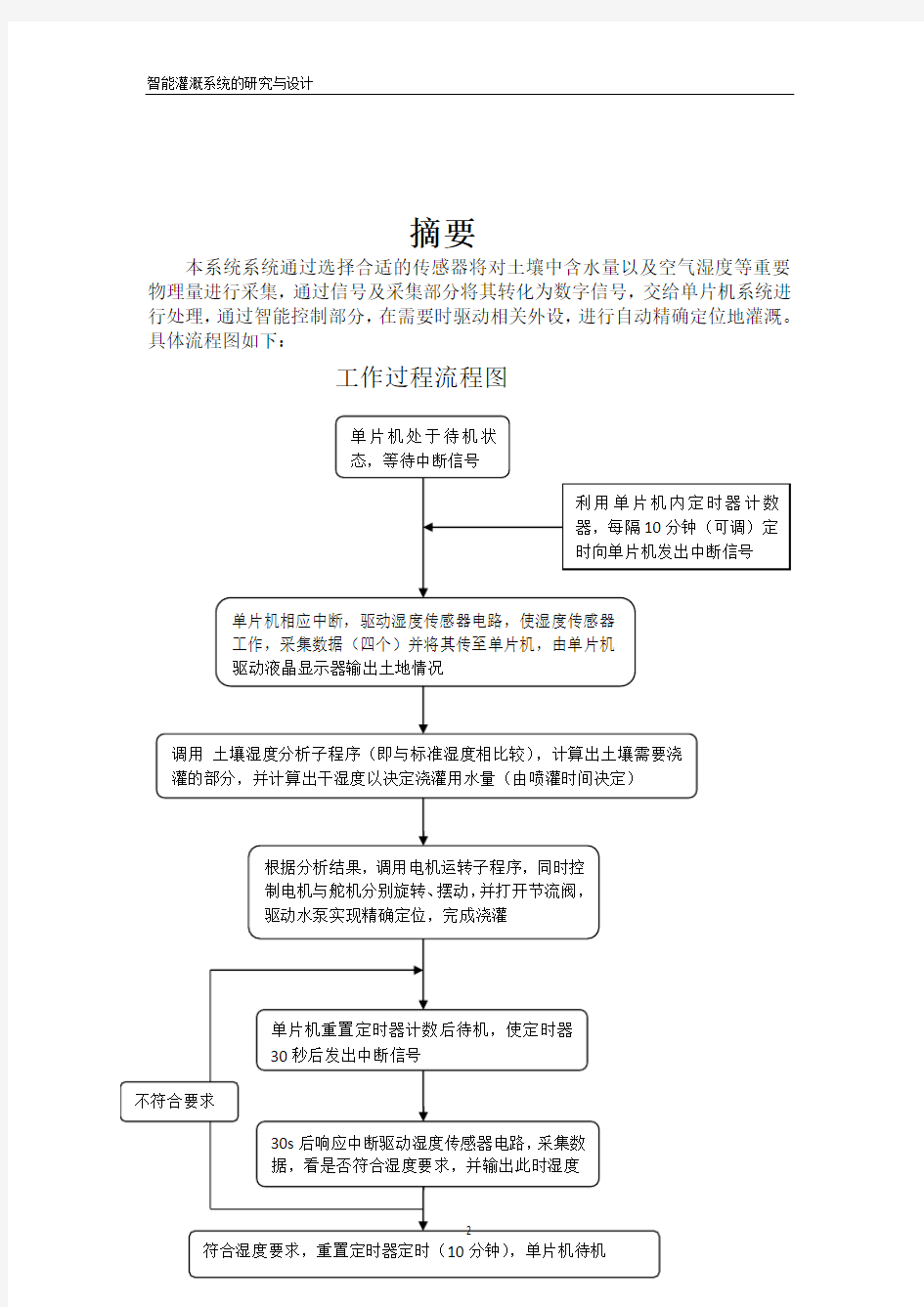
本系统系统通过选择合适的传感器将对土壤中含水量以及空气湿度等重要物理量进行采集,通过信号及采集部分将其转化为数字信号,交给单片机系统进行处理,通过智能控制部分,在需要时驱动相关外设,进行自动精确定位地灌溉。具体流程图如下:
工作过程流程图
关键字:智能控制精确定位密封湿度传感器差动放大顺序通电
液晶显示
机械设计部分
整体的机构形式如下所述:
水由出水口接入,经过水泵增压后,经过导水软管,最后从管的另一端喷射出来。机械臂主要由导水软管,套筒,舵机,步进电机和与电机配合的传动装置组成。套筒下端固结有加工上锥齿的圆环,电机通过锥齿轮传动,带动套筒转动。舵机固定在套筒上,当套筒旋转时,舵机也随套筒旋转。导水软管穿过套筒与固定在套筒上端的舵机相固结,当舵机臂摆动时导水软管喷头处完成竖直方向的调整,以使喷出的水能够调整远近。而套筒转动则实现了喷水方向的调整。这样,通过水平旋转及竖直摆动,实现了喷灌的精确定位。考虑到水对电机、齿轮传动部分的腐蚀影响,电机及其与套筒的传动部分通过密封箱密封,导线引出,连接到控制电路部分及电源部分,以实现对机械系统的电力输入及控制。机械臂通过套筒下端深埋入土壤进行固定。这种方案是我们经过多次调整最后确定出来的。下图为我们用机械仿真软件pro/engineer制作的图形(具体见附图)
我们的创新体现在我们的设计过程当中。在喷口的设计中,由于市场上所售的喷头多利用水压将水达到某个固定位置,因此不能实现喷灌位置的可调性要求。因此喷管管口需要重新设计。在喷头处,我们曾试验过多个方案。其中一个就是拟定用钢管作导水管,将水直接引到喷头,而喷头处设计成喷口可以转动的形式,通过增加一个电机并通过细杆与喷头处连实现竖直方向的转动,水平方向的转动还是靠另一个电动机带动套筒来实现(具体见附proe仿真图)。但是这种设计有两个问题我们没能解决。第一个问题就是密封的问题,喷口转动时对其密封要求较高,且此处水压较高,更增加密封难度。第二个问题就是底部的电机如何使上部的喷头进行竖直方向的摆动。此处传动距离较长,增加材料势必增加水平转动电机的负载,且此电机好密封,极易漏水烧毁电机。于是我们直接采用了接导水软管的方法。导水软管是用一种软橡皮材料做成的,我们在进行试验时,一端接从水泵流过的水,一端穿过套筒固定在舵机上,有较好的弹性,使灌溉机械臂在转动时,水管不会产生较大的阻力矩,也不会发生塑性变形影响使用。这种形式的优点是结构简单,使用方便,一根管足以解决喷头出的设计问题。缺点是电机带动套筒的转角不能持续朝一个方向转动,否则水管会打结使水流不通,且从水管浇灌到地面的水流呈柱状,对地面冲击较大。软管长期拉伸压缩会造成水管脱胶,碎裂等问题。
在实际设计计算中,需进行软管的拉压的疲劳强度的校核,及齿轮传动的校核计算。通过查机械设计的手册可以计算出所需的材料及其他要求。
在进行设计的过程中,我们查阅了上市的喷头的基本的工作原理,对其有了初步的了解。在进行结构设计得过程中,我们查阅了相关的机械原理、机械设计方面的书籍,增长了我们
的机械方面的知识及解决机械设计问题的能力。
具体构件可参见所附的proe零件图及整体装配图。
硬件电路部分设计
A.湿度传感器方案
我们采用通DX-S2型土壤湿度传感器,通过测出被测土壤的介电常数,并根据土壤容积含水率与土壤介电常数之间的非线性关系推导出土壤的容积含水率和重量含水率。本传感器对土壤水分变化有很高的灵敏度,因此温度、盐分、土壤性质变化因素的影响相对比较小,如果要求测量结果准确度高,应酌情对这些因素的影响进行修正。或采取其它措施减少这些因素的干扰。
湿度传感器各项参数如下:
测量参数土壤容积/重量含水率θ
量程4~50%(绝对重量含水率)
精度误差不超过2%
响应时间响应在1秒内进入稳定
工作环境-30℃~+55℃
工作电压4.5~5.5VDC,典型值5.0VDC
工作电流50mA
输出信号0~2.5V
B.运算放大器方案
传感器输出的电压信号为毫伏级,需要通过运放将信号放大,对运算放大器要求很高。基于此,我们考虑了可以采用以下几种方案:
方案一、利用普通低温漂运算放大器构成多级放大器。
普通低温漂运算放大器构成多级放大器会引入大量噪声。由于A/D 转换器需要很高的精度,所以几毫伏的干扰信号就会直接影响最后的测量精度。在调试中误差较大,所以,此种方案不宜采用。
方案二、由高精度低漂移运算放大器构成差动放大器。
差动放大器具有高输入阻抗,增益高的特点,可以利用普通运放( 如LM324) 做成一个差动放大器。
U1-U3组成仪表放大器,U4构成电压跟随器,用于调零电路.
基于以上分析,我们采用此种放大方式,(四集成度,芯片型号LM324)
C.电机方案
由于对浇灌机械臂的转速要求不高,且要实现精确定位,而且步进电机是将电脉冲信号转变为角位移或线位移的开环控制元件。在非超载的情况下,电机的转速、停止的位置只取决于脉冲信号的频率和脉冲数,而不受负载变化的影响,即给电机加一个脉冲信号,电机则转过一个步距角。这一线性关系的存在,加上步进电机只有周期性的误差而无累积误差等特点,使得在速度、位置等控制领域用步进电机来控制变的非常的简单。由此,电机采用四相六线混合式步进电机,以实现对喷灌机械臂的转动控制。
在最初的电机驱动方案中,采用L298芯片+二极管吸收电路,用设计好的开关电源给L298以及步进电机供电。电路经keil+proteus仿真后可以实现对电机的控制,仿真阶段未出现任何问题。电路图如下:
但此电路在实际调试中,由于从l298的2、3、13、14脚输出信号变化较快,二极管导通出现问题;
电机正转调试c语言子程序如下:
#include
void delay1s(void)
{ unsigned char j,k;
for(j=50;j>0;j--)
for(k=100;k>0;k--);
}
main()
{
unsigned char a[8]={0x24,0x35,0x11,0x39,0x28,0x3a,0x12,0x36} ;
unsigned char b;
unsigned char i=0;
while(i<=50)
{
for(b=0;b<8;b++)
{
P1=a[b]; delay1s(); i++; }} }
1、电机的转速控制:
以实现调50齿,所以每完成i 的取值关系为:
可以将i 设置成函
的顺序倒过来,即依次为
,依次循环。 但仍有需改进的地方:此电机在高频状态, 我们选用了成都市飞宇达实业有限公司出品的FYD12864-0402B 型的液晶显示模块。
此模块提供硬体光标及闪烁控制电路,由地址计数器的值来指定DDRAM 中的光标或闪烁位置。该模块具有2.7~5.5V 的宽工作电压范围,且具有睡眠、正常及低功耗工作模式,可满足系统各种工作电压及便携式仪器低功耗的要求。液晶模块显示负电压,也由模块提供,从而简化了系统电源设计。模块同时还提供LED 背光显示功能。除此之外,模块还提供了画面清除、游标显示/隐藏、游标归位、显示打开/关闭、显示字符闪烁、游标移位、显示移位、垂直画面旋转、反白显示、液晶睡眠/唤醒、关闭显示等操作指令。
下图为液晶显示程序流程图: 下图为proteus 仿真图:
E 、舵机控制方案
舵机是一种位置伺服的驱动器,适用于那些需要角度不断变化并可以保持的控制系统。其工作原理是:控制信号由接收机的通道进入信号调制芯片,获得直流偏置电压。它内部有一个基准电路,产生周期为20ms,宽度为1.5ms的基准信号,将获得的直流偏置电压与电位器的电压比较,获得电压差输出。最后,电压差的正负输出到电机驱动芯片决定电机的正反转。当电机转速一定时,通过级联减速齿轮带动电位器旋转,使得电压差为0,电机停止转动。
单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的PWM周期信号,本设计是产生20ms的周期信号;其次是脉宽的调整,即单片机模拟PWM 信号的输出,并且调整占空比。当系统中只需要实现一个舵机的控制,采用的控制方式是改变单片机的一个定时器中断的初值,将20ms分为两次中断执行,一次短定时中断和一次长定时中断。这样既节省了硬件电路,也减少了软件开销,控制系统工作效率和控制精度都很高。具体的设计过程:例如想让舵机转向左极限的角度,它的正脉冲为2ms,则负脉冲为20ms-2ms=18ms,所以开始时在控制口发送高电平,然后设置定时器在2ms后发生中断,中断发生后,在中断程序里将控制口改为低电平,并将中断时间改为18ms,再过18ms进入下一次定时中断,再将控制口改为高电平,并将定时器初值改为2ms,等待下次中断到来,如此往复实现PWM信号输出到舵机。用修改定时器中断初值的方法形成了脉冲信号,调整时间段的宽度便可使伺服机灵活运动。
F.电源部分设计
对于此系统的供电问题,由于需要对电机供电,因此需要大电流,传统的线性电源,体积笨重,内阻大,效率低,大电流时驱动负载能力差,因此我们采用了开关电源,内阻小,适合强电流供电。其电路图如上,通过电路的连接,我们得到了12V (2A)5V(1A)3.5V(1A)三路电源,而且调试成功。
对于此电路有一个亮点就是,电源系统中有两个开关控制电路,一个是对强电的开关控制,另外一个是对变压器副边整流后电压的开关控制以达到稳压目的,普通的稳压管,如果整流后的电压为16V而稳压管是12V则在负载电流为1A时,稳压管的功率是4W,此时稳压管发烫,而且电能浪费,而对于由UA741控制的初步稳压电路可以实现在负载电流为1A 使稳压功耗不足1W.
电路原理图如下:
G、对单片机的改进设计
在进行实验过程中,由于处理中断较多,我们感觉到51单片机的片内资源不够,增加芯片势必增加电路板的体积。所以我们最后学习并采用了MSP430的单片机来改进我们的系统。
MSP430F247单片机具有超低功耗、集成高性能的模拟器件、16位RISC结构的CPU、在线编程、多时钟、集成开发环境简单等特点。片内资源丰富,有ADC,PWM,若干TIME,串行口,WATCHDOG,FLASH,比较器,模拟信号等。
另外在本系统中我们需要应用多路A/D转换功能,本单片机刚好为我们提供了8路A/D转换接口。同时本单片机具有强大的处理功能,采用了精简指令集(RISC )结构,具有丰富的寻址方式(7 种源操作数寻址、 4 种目的操作数寻址)、简洁的27 条内核指令以及大量的模拟指令;大量的寄存器以及片内数据存储器都可参加多种运算;还有高效的查表处理指令;有较高的处理速度,在8MHz 晶体驱动下指令周期为125 ns 。这些特点保证了可编制出高效率的源程序。低功耗是目前一项很令人关注的性能指标,MSP430 系列单片机的电源电压采用的是1.8~3.6V 电压。因而可使其在1MHz 的时钟条件下运行时,芯片的电流会在200~400uA 左右,时钟关断模式的最低功耗只有0.1uA 。其次是独特的时钟系统设计。基本时钟系统和锁频环(FLL 和FLL+ )时钟系统或DCO 数字振荡器时钟系统。由系统时钟系统产生CPU 和各功能所需的时钟。并且这些时钟可以在指令的控制下,打开和关闭,从而实现对总体功耗的控制。当系统处于省电的备用状态时,用中断请求将它唤醒只用6us 。并且该单片机内的片内可擦写FLASH为我们提供了一个很方便的存储器,即使在掉电的情况下也不会改变内部的数据。Msp430F247单片机的种种功能刚好满足了我们的需求,正是它的存在,是我们的系统更加完善。
程序清单
A、程序流程
B、部分模块驱动程序:
1、液晶驱动:
//************初始化液晶**************// void initLCD(void)
{
Delayms(50);
WR_COM(0x30);
Delay10us(20);
WR_COM(0x30);
Delay10us(5);
WR_COM(0x0c);
Delay10us(20);
WR_COM(0x01);
Delayms(20);
WR_COM(0x06);
WR_COM(0x0c);
CLR();
}
//**********************************清屏********************// void CLR(void)
{Busy();
RS_0;
RW_0;
E_1;
_NOP();
P4OUT=0x01;
E_0;
}
//*********************写控制字函数****************************// void WR_COM(unsigned char ins)
{
Busy();
RS_0;
RW_0;
E_1;
P4OUT=ins;
E_0;
}
//*********************写数据函数**************************** void WR_DAT(unsigned char dat)
{
Busy();
RS_1;
RW_0;
E_1;
P4OUT=dat;
E_0;
}
//*********************初始化I/O**************************** void LCD_port_init(void)
{
P5SEL =0X00;
P4SEL =0X00;
P5DIR|=BIT0;
P5DIR|=BIT1;
P5DIR|=BIT2;
P4DIR =0XFF;
P4OUT=0X00;
initLCD();
}
2、步进电机驱动:
void delay1s(void)
{ unsigned char j,k;
for(j=50;j>0;j--)
for(k=100;k>0;k--);
}
main()
{
unsigned char a[8]={0x24,0x35,0x11,0x39,0x28,0x3a,0x12,0x36} ; unsigned char b;
unsigned char i=0;
while(i<=50)
{
for(b=0;b<8;b++)
{
P1=a[b];
delay1s();
i++; }} }
void power(float t/*速度值,保留一位小数*/,unsigned char m) {
unsigned char gaodu=0;
uchar b,c,d,e,f,g;
f=m;
while(f)
{
for(c=0;c<5;c++)
{
for(b=8;b>0;b--)
{
g=b-1;
P3OUT=a[g];
power_delay(t);
}
}
f--;
gaodu=m-f;
d=gaodu/10;
e=gaodu%10;
now_hight[9]=d+0x30;
now_hight[10]=e+0x30;
write_char(now_hight,0,1);
}
}
void anti_power(float t/*速度值,保留一位小数*/,unsigned char m) {
unsigned char gaodu=0;
uchar b,c,d,e,f;
f=0;
while(m)
{
for(c=0;c<5;c++)
{
for(b=0;b<8;b++)
{
P3OUT=a[b];
power_delay(t);
}
}
f++;
m--;
gaodu=70-f;
d=gaodu/10;
e=gaodu%10;
now_hight[9]=d+0x30;
now_hight[10]=e+0x30;
write_char(now_hight,0,1);
}
}
void anti_power_d(float t/*速度值,保留一位小数*/,unsigned char m) {
unsigned char gaodu=0;
uchar b,c,d,e,f;
f=0;
while(m)
{
for(c=0;c<5;c++)
{
for(b=0;b<8;b++)
{
P3OUT=a[b];
power_delay(t);
}
}
f++;
m--;
gaodu=ii-f;
d=gaodu/10;
e=gaodu%10;
now_hight[9]=d+0x30;
now_hight[10]=e+0x30;
write_char(now_hight,0,1);
}
}
3、舵机驱动:
BCSCTL1=0x0;
BCSCTL2=0x88;
do
{
IFG1&=~OFIFG;
for(i=0xff;i>0;i--);
}
while ((IFG1&OFIFG)!=0);
P1DIR=0XFF;
P1SEL=0XFF;
TACTL=0x2d2;
CCTL1=OUTMOD_7;
CCR0=20000;
while(1)
{
CCR1=2000;
delay();
CCR1=1000;
delay();
4、键盘驱动:
//初始化P1中断
void KEY_1_init(void)
{
P1DIR=0;
P1SEL=0;
P1DIR|=BIT3;
P1DIR|=BIT5;
P1DIR|=BIT6;
P1DIR|=BIT7;
P1OUT=0X00;
P1IE=0;
P1IES=0;
P1IFG=0;
P1IE|=BIT0;
P1IES|=BIT0;
P1IE|=BIT1;
P1IES|=BIT1;
P1IE|=BIT2;
P1IES|=BIT2;
P1IE|=BIT4;
P1IES|=BIT4;
}
//初始化P2中断+P3
void KEY_2_init(void)
{
P2DIR=0;
P2SEL=0;
P2IE=0; //禁止P2口中断
P2IES=0XFF; //现在是下降沿触发
P2IFG=0; //标志寄存器清零,无中断请求。P2IE|=BIT0;
P2IES&=~BIT0;
P2IE|=BIT1;
P2IES&=~BIT1;
P2IE|=BIT2;
P2IES&=~BIT2;
P2IE|=BIT3;
P2IES&=~BIT3;
P2IE|=BIT4;
P2IES|=BIT4;
P2DIR|=BIT5;
P2DIR|=BIT6;
P2DIR|=BIT7;
P2_7_H;//高阻
P3SEL=0;
P3DIR=0XFF;
P6SEL=0;
P6DIR|=BIT3;
//_EINT();
}
int keyprocess(void)
{
int np10,np11,np12,np13;
int nres=0;
//P1.5输出低电平
P1OUT=0xd0;
np10=P1IN&BIT0;
if(np10==0) nres=7;
np11=(P1IN&BIT1)>>1;
if(np11==0) nres=1;
np12=(P1IN&BIT2)>>2;
if(np12==0) nres=4;
np13=(P1IN&BIT4)>>4;
if(np13==0) nres=11;//取消键
//P1.6输出低电平
P1OUT=0xb0;
np10=P1IN&BIT0;
if(np10==0) nres=8;
np11=(P1IN&BIT1)>>1;
if(np11==0) nres=2;
np12=(P1IN&BIT2)>>2;
if(np12==0) nres=5;
np13=(P1IN&BIT4)>>4;
if(np13==0) nres=0;
//P1.7输出低电平
P1OUT=0x70;
np10=P1IN&BIT0;
if(np10==0) nres=9;
np11=(P1IN&BIT1)>>1;
if(np11==0) nres=3;
np12=(P1IN&BIT2)>>2;
if(np12==0) nres=6;
np13=(P1IN&BIT4)>>4;
if(np13==0) nres=12;//确定键
P1OUT=0x00; //恢复以前值
for(;;)
{
//读各个管脚的状态
np10=P1IN&BIT0;
np11=(P1IN&BIT1)>>1;
np12=(P1IN&BIT2)>>2;
np13=(P1IN&BIT4)>>4;
if(np10==1&&np11==1&&np12==1&&np13==1) { //等待松开按键
break;
}
}
return nres;
}
int keyscan(void)
{
int np10,np11,np12,np13;
int nres=0;
for(;;)
{
//读取各个管脚的状态
np10=P1IN&BIT0;
np11=(P1IN&BIT1)>>1;
np12=(P1IN&BIT2)>>2;
np13=(P1IN&BIT4)>>4;
//是否有键被按下
if(np10==0||np11==0||np12==0||np13==0) { //有键被按下
_NOP();
break;
} }
Delay(50);
//读各个管脚的状态
np10=P1IN&BIT0;
np11=(P1IN&BIT1)>>1;
np12=(P1IN&BIT2)>>2;
np13=(P1IN&BIT4)>>4;
//是否有键被按下
if(np10==0||np11==0||np12==0||np13==0) { //有键被按下,进行按键分析
nres=keyprocess(); }
else return 10;//非有效键
return nres;
}
4、延时程序:
extern void Delay_(unsigned int n)
{
unsigned int i=60000;
uchar j;
while(i)
{
for(j=0;j<50;j++)
{
while(n!=0)
{n--;}
i--;
}}}
extern void Delay(unsigned int n)
{
while(n!=0)
{n--;}
}
extern void Delayms(unsigned char t) // delay 1ms
{
unsigned int i;
for(;t!=0;t--)
for(i=0;i<1600;i++);
}
extern void Delay10us(unsigned char k) // delay 10us
{
unsigned char i;
for(;k!=0;k--)
for(i=0;i<16;i++);
}
extern void power_delay( float t)
{
unsigned int i,tt;
t=50.0/t;
tt=t*100;
for(;tt!=0;tt--)
for(i=0;i<8;i++);
}
三、主程序:
#include"msp430x24x.h"
#include"lianjie.h"
#include"declaration.h"
#include"delay.c"
#include"lcd_show.c"
#include"key.c"
#include"8563.c"
#include"power.c"
#include"raise.c"
#include"flash.c"
#include"fujia.c"
//************初始化系统时钟**************//
void InitSystemClock(void)
{
unsigned char i;
WDTCTL=WDTPW+WDTHOLD; //关闭看门狗
BCSCTL1=0x00; //Set 430 clk 开启XT2,DOC的标称频率为最低且不分频;XT1为低速晶体(32.768K)
BCSCTL2=SELM_2+SELS; //选择MCLK SCLK的时钟源为高速时钟不分频,均为8M
do
{
IFG1&=~OFIFG;
for(i=0xff;i>0;i--);
}
while ((IFG1&OFIFG)!=0);
}
void main(void)
{
InitSystemClock();
sendinit();
flash_ini();
Init_TimerB();
KEY_2_init();
KEY_1_init();// 里面已有开中断了!LCD_port_init();
_EINT();
LCD_port_init();
while(1) ;
}
#pragma vector=TIMERB0_VECTOR//P1 __interrupt void TimerB_ISR(void) {
Receive();
Show();
Analyse();
Power();
}
总结
其实在实际的设计以及调试过程中,出现的问题很多。拿步进电机的调试来说,在刚开始设计程序时,采用了二相四拍的通电顺序,在驱动电机时,电机抖动、丢步现象都较为严重,明显实验室的电源箱不满足要求,于是采用了开关电源给电机供电,情况虽有所好转,但仍有丢步现象发生。通过多次的单片机程序调试与实验,均未能解决。最后,将电机的通电状态改为二相八拍的运行方式,才使得问题得以解决,使电机平稳运转,满足了设计的要求。
在调试运算放大器部分时,所使用运算放大器LM324,缺点很多,比如调零系统要在外部进行,而且它受温度的影响很严重。使得测试的结果出现较大的偏差,但是我们才用来仪表放大的接法,增加了输入阻抗,降低了温漂,虽然性能不如市场上集成的仪表放大器,但是已经满足实际要求,这样与市场价几十元的仪表放大器相比,一个四集成度的LM324只需二元钱,这样就降低了系统的成本,从某种意义上来说是一种节约也是一种创新。
对于电机驱动部分,我们首先到的是采用多个率三极管,虽然能满足要求,但是电流过大三极管升温很快,这样三极管寿命就受到影响,不仅如此电能也浪费了,我们放弃了这个方案,采用L298,但是如果不接步进电机,测量波形完全正确,但是与步进电机相接,很快波形出错,步进电机不能正常运转,然后检查元件就会发现单片机对应I/O口被烧坏,我们起初以为这是偶然,但是在连烧了两块单片机以后,我们意识到问题的严重性,但是百思不得其解,最后在网络上看到步进电机在工作时会产生反相电压,我们测量一下,发现大得惊人,最后我们采用高速肖特基二极管对反向电压进行吸收,从此以后驱动这部分电路再也没出过问题。
在制作供水管道时,漏水一直是个很棘手的问题,因电子线路不能受潮,而且如果密封不好,水压与计算的将有偏差,不仅如此还会造成喷灌不均匀进而在成水资源的浪费。我们最先考虑到的是双向反作用力式喷头,这种喷头对密封性要求特别高,因此成本也很高,不仅如此,这种喷头密封处一旦受到腐蚀,摩擦力变大,有可能喷头因锈蚀而不能转动。我们放弃了这种成本高性能没有保障的方案,我们最终一致通过采用舵机控制软管的方案,这种方案喷头与机械结构没有依赖,这样就不会出现漏水的现象。这种主动式的喷头结构使系统的可控性很强,定点误差小,更能节约水资源,和电力资源。
对于传感器的放置我们起先采用的是等面积放置,但是这种等面积放置有一定的局限性,对于大面积灌溉时,等面积放置并不能反映现实土壤湿度分布情况,最后我们经过讨论认为以喷头为圆心,等差半径圆周上等长度放置一个传感器,因为喷头是圆周喷洒,这样后者就更准确更多的反映实际情况。
智能灌溉系统的研究与设计综述
毕业设计(论文)题目智能灌溉系统的研究与设计 教学点 专业 年级 姓名 指导教师 定稿日期:2011 年6月1 日
摘要 本系统系统通过选择合适的传感器将对土壤中含水量以及空气湿度等重要物理量进行采集,通过信号及采集部分将其转化为数字信号,交给单片机系统进行处理,通过智能控制部分,在需要时驱动相关外设,进行自动精确定位地灌溉。具体流程图如下: 工作过程流程图
关键字:智能控制精确定位密封湿度传感器差动放大顺序通电 液晶显示 机械设计部分 整体的机构形式如下所述: 水由出水口接入,经过水泵增压后,经过导水软管,最后从管的另一端喷射出来。机械臂主要由导水软管,套筒,舵机,步进电机和与电机配合的传动装置组成。套筒下端固结有加工上锥齿的圆环,电机通过锥齿轮传动,带动套筒转动。舵机固定在套筒上,当套筒旋转时,舵机也随套筒旋转。导水软管穿过套筒与固定在套筒上端的舵机相固结,当舵机臂摆动时导水软管喷头处完成竖直方向的调整,以使喷出的水能够调整远近。而套筒转动则实现了喷水方向的调整。这样,通过水平旋转及竖直摆动,实现了喷灌的精确定位。考虑到水对电机、齿轮传动部分的腐蚀影响,电机及其与套筒的传动部分通过密封箱密封,导线引出,连接到控制电路部分及电源部分,以实现对机械系统的电力输入及控制。机械臂通过套筒下端深埋入土壤进行固定。这种方案是我们经过多次调整最后确定出来的。下图为我们用机械仿真软件pro/engineer制作的图形(具体见附图)
我们的创新体现在我们的设计过程当中。在喷口的设计中,由于市场上所售的喷头多利用水压将水达到某个固定位置,因此不能实现喷灌位置的可调性要求。因此喷管管口需要重新设计。在喷头处,我们曾试验过多个方案。其中一个就是拟定用钢管作导水管,将水直接引到喷头,而喷头处设计成喷口可以转动的形式,通过增加一个电机并通过细杆与喷头处连实现竖直方向的转动,水平方向的转动还是靠另一个电动机带动套筒来实现(具体见附proe仿真图)。但是这种设计有两个问题我们没能解决。第一个问题就是密封的问题,喷口转动时对其密封要求较高,且此处水压较高,更增加密封难度。第二个问题就是底部的电机如何使上部的喷头进行竖直方向的摆动。此处传动距离较长,增加材料势必增加水平转动电机的负载,且此电机好密封,极易漏水烧毁电机。于是我们直接采用了接导水软管的方法。导水软管是用一种软橡皮材料做成的,我们在进行试验时,一端接从水泵流过的水,一端穿过套筒固定在舵机上,有较好的弹性,使灌溉机械臂在转动时,水管不会产生较大的阻力矩,也不会发生塑性变形影响使用。这种形式的优点是结构简单,使用方便,一根管足以解决喷头出的设计问题。缺点是电机带动套筒的转角不能持续朝一个方向转动,否则水管会打结使水流不通,且从水管浇灌到地面的水流呈柱状,对地面冲击较大。软管长期拉伸压缩会造成水管脱胶,碎裂等问题。 在实际设计计算中,需进行软管的拉压的疲劳强度的校核,及齿轮传动的校核计算。通过查机械设计的手册可以计算出所需的材料及其他要求。 在进行设计的过程中,我们查阅了上市的喷头的基本的工作原理,对其有了初步的了解。在进行结构设计得过程中,我们查阅了相关的机械原理、机械设计方面的书籍,增长了我们
给水工程设计(审图)标准
给水工程设计(审图)标准()月第一次修订2018年9第一章总则 第一条给水工程设计(审图)以确保安全供水为前提,以先进技术为保障, 以提高工程质量为标准。 第二条新建、改建和扩建给水工程设计(审图)以大连金普新区给水管网总体规划为依据。 第三条给水工程包括市政管道工程、住宅配套工程、公共设施配套工程、工商企业配套工程等。 第二章设计(审图)依据及标准规范 第四条给水工程设计(审图)标准应符合现行国家、行业相关规范、标准要求。 第五条设计(审图)相关依据。 (一)、《建筑给水排水设计规范》(2009年版)GB50015-2003;(二)、《室外给水设计规范》 GB50013-2006; (三)、《城市工程管线综合规划规范》GB50289-98; (四)、《泵站设计规范》GB 50265-2010; (五)、《建筑设计防火规范》GB50016-2014; (六)、《城市给水工程规划规范》GB 50282-98; ;GB50268-2008《给水排水管道工程施工及验收规范》、(七).
(八)、《建筑给水排水及采暖工程施工质量验收规范》 GB50242-2002;(九)、《节水型卫生洁具》GBT31436-2015; (十)、《大连市供水用水管理条例》 2012版; (十一)、《大连市节约用水条例》 2013版; (十二)、《大连开发区住宅类建筑给水管道施工技术标准》; (十三)、《大连开发区城市居民二次供水加压泵站(设计)建设标准》;等相关的设计、施工、验收规范及技术标准。 第三章室内给水工程 第一节管道设置 第六条室内生活给水管道宜布置成枝状,单向供水。 第七条管道应设置在单元管道井内,管道井的净尺寸应符合规范要求,且管 道井开门尺寸不小于800×600mm。住宅项目室内给水平面图中应设 计水暖管道井管线(含智能水表穿线套管)平面布置详图。 第八条管道应固定在管道井内,管道支架采用50x50mm镀锌角钢制作。 第九条管道采用橡塑棉保温。 第十条室内出户管埋深以室外地坪下1.2米为标准。 第二节管材选用 第十一条公建及住宅分户水表前管材宜选用S4级(PN16)PPR给水塑料管。
智能化灌溉系统的设计与实现
智能化灌溉系统的设计与实现 O 引言 我国农业用水量约占总用水量的80%左右,由于农业灌溉效率普遍低下,水的利用率仅为45%,而水资源利用率高的国家已达70%~80%,因而,解决农业灌溉用水的问题,对于缓解水资源的紧缺是非常重要的。我们的智能灌溉系统在这种背景下应运而生了。智能灌溉系统不仅可以提高源利用率,缓解水资源日趋紧张的矛盾,还可以增加农作物的产量,降低农产品的成本。基于传感器技术的智能灌溉系统是我国发展高效农业和精细农业的必由之路。智能灌溉系统涉及到传感器技术、自动控制技术、计算机技术、无线通信技术等多种高新技术,这些新技术的应用使我国的农业由传统的劳动密集型向技术密集型转变奠定了重要的基础。 我国北方各省水资源缺乏,然而多年来使用传统方式为植株浇水不仅效率低、成本高而且浪费十分来重。对于大面积种植的棉田实现精准灌溉,不仅可以提高源利用率,缓解水资源日趋紧张的矛盾,还可以增加农作物的产量,降低生产的成本。 由传统的充分灌溉向非充分灌溉发展,对灌区用水进行监测预报,实际动态管理。采用传感器来监测土壤的墒情,实现灌溉管理的自动化。高效农业和精细农业要求我们必须提高水资源的利用率。要真正实现水资源的高效,仅凭单项节水灌溉技术是不可能解决的。必须将水源开发、输配水、灌水技术和降雨、蒸发、土壤墒情以及农作物需水规律等方面做统一考虑。做到降雨、灌溉水、土壤水和地下水联合调用,实现按期、按需、按量自动供水。如何利用有限的水资源,走“节水农业”已经成为农业生产获得最佳的效益和持续稳定发展的增长点。因此使用自来水发电的智能灌溉系统,控制喷灌和微灌系统,能有效地减少田间灌水过程中的渗漏和蒸发损失。现有的灌溉系统都要外接电源,存在一定的安全隐患且较麻烦。本系统可在无供电条件的地区使用,其最大优点为节水、节能、节约劳动力。 1 设计目标与实现方案描述 针对现有的智能化灌溉系统都需要外加电源供电,存在一定安全隐患,而且现有的自动灌溉装置的程序一般固化在系统的程序存储器内,只能简单地设置灌溉时间及循环时间,不能灵活根据季节不同自动调节等缺点,该系统将小型直流发电机接上风叶至于密封特制的盒子中,用水流带动风叶旋转来发电,再将电能储存到蓄电池中以给监控电路和电磁阀供电。该装置是以湿敏电阻和光敏电阻检测信号,自来水发电用作供电的一种无需外接电源的自动灌溉装置。该装置监控电路由信号采集部分,灌溉控制部分,电源部分,执行部分4部分组成。如图1所示。 1.1 信号采集部分 1.1.1 土壤湿度检测 采用硅湿敏电阻作为检测土壤湿度的传感器,它在25℃时响应时间小于5 s,检测土壤含水量范围为O~100%。 当湿敏传感器插入土壤时,由于土壤含水量不同,使得湿敏传感器的阻值也不同。通过湿敏电阻和IC1NE555判断湿度强弱,如果是土壤较干燥,湿敏电阻阻值较大,NE555翻转,输出高电平(约为电源电压)。 调整时,将湿敏电阻插入水内,调Rp1使NE555的3脚输出为12 V,然后将湿敏电阻从水中取出并擦干,调Rp1使输出0 V,这样反复调节多次即可达到要求。 1.1.2 日光强弱检测 通过光敏电阻和NE555判断光线是否强烈,如果是中午光线较强烈,IC2 NE555的3脚输
大楼物业供水系统设计
大楼物业供水系统 设计
大楼物业供水系统设计 目录 第 1 章绪论 (1) 1.1 研究背景 (1) 1.2 供水系统设计要求 (2) 1.3 供水系统设计思想 (3) 1.4 供水系统方案确定 (4) 1.5 供水系统运行和原理 (4) 1.5.1 系统原理说明 (4) 1.5.2 系统运行说明 (5) 第 2 章可编程控制器的概述 (7) 2.1 可编程控制器介绍 (7) 2.2 三菱FX系列介绍 (7) 2.2.1 三菱FX系列PLC主要特点 (8) 2.2.2 三菱FX系列PLC主要数据简介 (8) 2.2.3 三菱FX系列PLC基本指令 (9) 2.3 可编程控制器的特点 (10) 2.4 可编程控制器的工作原理 (10) 2.4.1 PLC的等效工作电路 (10) 2.4.2 PLC的工作过程 (12) 第 3 章系统硬件设计 (14) 3.1 系统的构成 (14)
3.2 系统主要硬件设备的选型 (16) 3.2.1 PLC的选型 (16) 3.2.2 水泵机组的选型 (17) 3.2.3 压力传感器的选型 (18) 3.3 系统电路分析及设计 (20) 3.3.1 系统电源 (20) 3.3.2 供水系统主电路分析与设计 (21) 3.3.3 可编程控制器I/O分配 (24) 3.3.4 PLC I/O接线图 (25) 3.3.5 压力传感器信号处理 (26) 3.3.6 报警电路设计 (27) 第 4 章系统的软件设计 (30) 4.1 软件开发环境简介 (30) 4.2 供水系统程序流程图 (31) 4.3 供水系统程序设计及解析 (32) 4.3.1 程序的模式选择、水泵工作程序设计及解析 (32) 4.3.2 程序的保护、报警选择程序设计及解析 (34) 4.4 程序调试及仿真 (37) 4.5 程序调试及仿真体会 (39) 结论 (42) 致谢 (44) 参考资料 (46)
智能农业灌溉系统方案设计
智能农业灌溉系统方案设计 托普物联网认为所谓智能农业灌溉系统就是不需要人的控制,系统能自动感测到什么时候需要灌溉,灌溉多长时间;系统可以自动开启灌溉,也可以自动关闭灌溉;可以实现土壤太干时增大喷灌量,太湿时减少喷灌量。要实现此功能就要充分利用可编程控制器的控制作用。系统要实现自动感测土壤湿度的功能必须要有土壤湿度传感器。要实现灌溉水量的多与少的调节,必须要有变频器。在可编程控制器内预先设定50%—60%RH为标准湿度,传感器采集的湿度模拟信号经A/D模块转换成数字信号。 针对灌溉水利用系数较低,文中提出一种基于嵌入式智能灌溉控制系统。依托无线传感器网络采集灌区作物需水信息,汇聚到网关节点发送给主控中心,中心主机根据信息确定灌溉状态并计算灌水量,控制灌溉设备工作实现智能灌溉;依托Internet管理员有权对系统远程管理,满足了规模化灌溉的需求。根据示范区观测,灌溉水利用系数由原来的0.6提高到0.9。系统结合了无线传感、计算和网络通信技术,解决了精确农业亟待解决的关键技术问题。 智能农业灌溉系统涉及到传感器技术、自动控制技术、计算机技术、无线通信技术等多种高新技术,这些新技术的应用使我国的农业由传统的劳动密集型向技术密集型转变奠定了重要的基础。 智能农业灌溉系统可以根据植物和土壤种类,光照数量来优化用水量,还可以在雨後监控土壤的湿度。有研究现实,和传统灌溉系统相比,智能农业灌溉系统的成本差不多,却可节水16%到30%。加州出台的新法案要求2012年起新公司必须使用智能农业灌溉系统。 智能农业灌溉系统 背景
灌溉造成水资源浪费 美国每年浪费掉的水资源高达8,520亿升,而若安装一种智能农业灌溉系统则可有效地控制水流量,达到节水目的。 HydroPoint公司负责可持续领域业务的Chris Spain援引美国用水工程协会的报告称,美国住宅区和商业区的草坪、植物灌溉用水浪费了30%到300%。 水资源被浪费的原因是技术不行,美国有4,500万个仅是安有简易计时器的灌溉系统,它们在时间控制上还可以,但精准度不高。Spain称,城市灌溉系统占城市用水的58%,这些被浪费的水资源每年生产54.4万吨温室气体。 在中国农业用水量约占总用水量的80%左右,由于农业灌溉效率普遍低下,水的利用率仅为45%,而水资源利用率高的国家已达70%~80%,因而,解决农业灌溉用水的问题,对于缓解水资源的紧缺是非常重要的。我们的智能农业灌溉系统在这种背景下应运而生了。 不仅美国,英国也开始关注节水问题。英国节能信托基金会和能源部警告,随着越来越多的家庭开始节约能源,使用热水可能会超过取暖成为制造二氧化碳的主要途径。 智能农业灌溉系统整体方案图 结构 系统结构
智能节水灌溉系统的设计原理及使用方法
智能节水灌溉系统的设计原理及使用方法 智能节水灌溉系统也叫智能农业物联网精细农业自控系统,是托普云农物联网为保证农业作物需水量的前提下,实现节约用水而提出的一整套解决方案。智能节水灌溉系统简单的说就是农业灌溉不需要人的控制,系统能自动感测到什么时候需要灌溉,灌溉多长时间;智能节水灌溉系统可以自动开启灌溉,也可以自动关闭灌溉;可以实现土壤太干时增大喷灌量,太湿时减少喷灌量。 一、智能节水灌溉系统的功能设计 智能节水灌溉系统要实现上述功能就要充分利用可编程控制器的控制作用。系统要实现自动感测土壤湿度的功能必须要有土壤湿度传感器。要实现灌溉水量的多与少的调节,必须要有变频器。在可编程控制器内预先设定50%—60%RH为标准湿度,传感器采集的湿度模拟信号经A/D模块转换成数字信号。 针对灌溉水利用系数较低,文中提出一种基于嵌入式智能灌溉控制系统。依托无线传感器网络采集灌区作物需水信息,汇聚到网关节点发送给主控中心,中心主机根据信息确定灌溉状态并计算灌水量,控制灌溉设备工作实现智能灌溉;依托Internet管理员有权对系统远程管理,满足了规模化灌溉的需求。根据示范区观测,灌溉水利用系数由原来的0.6提高到0.9。系统结合了无线传感、计算和网络通信技术,解决了精确农业亟待解决的关键技术问题。 智能节水灌溉系统涉及到传感器技术、自动控制技术、计算机技术、无线通信技术等多种高新技术,这些新技术的应用使我国的农业由传统的劳动密集型向
技术密集型转变奠定了重要的基础。 智能节水灌溉系统可以根据植物和土壤种类,光照数量来优化用水量,还可以在雨後监控土壤的湿度。有研究现实,和传统灌溉系统相比,智能节水灌溉系统的成本差不多,却可节水16%到30%。加州出台的新法案要求2012年起新公司必须使用智能节水灌溉系统。 二、智能节水灌溉系统的设计背景 灌溉造成水资源大量浪费 美国每年浪费掉的水资源高达8,520亿升,而若安装一种智能节水灌溉系统则可有效地控制水流量,达到节水目的。HydroPoint公司负责可持续领域业务的Chris Spain援引美国用水工程协会的报告称,美国住宅区和商业区的草坪、植物灌溉用水浪费了30%到300%。 水资源被浪费的原因是技术不行,美国有4,500万个仅是安有简易计时器的灌溉系统,们在时间控制上还可以,但精准度不高。Spain称,城市灌溉系统占城市用水的58%,这些被浪费的水资源每年生产54.4万吨温室气体。 在中国农业用水量约占总用水量的80%左右,由于农业灌溉效率普遍低下,水的利用率仅为45%,而水资源利用率高的国家已达70%~80%,因而,解决农业灌溉用水的问题,对于缓解水资源的紧缺是非常重要的。我们的智能节水灌溉系统在这种背景下应运而生了。 不仅美国,英国也开始关注节水问题。英国节能信托基金会和能源部警告,随着越来越多的家庭开始节约能源,使用热水可能会超过取暖成为制造二氧化碳的主要途径。 三、智能节水灌溉系统工作原理 灌溉系统工作时,湿度传感器采集土壤里的干湿度信号,检测到的湿度信号
基于PLC控制技术的农业自动灌溉系统设计
基于PLC控制技术的农业自动灌溉系统设计摘要: 水是一切生命过程中不可替代的基本要素,水资源是国民经济和社会发展的重要基础资源。我国是世界上13个贫水国之一,人均水资源占有量2300立方米,只有世界人均水平的1/4,居世界第109位。而且时空分布很不均匀,南多北少,东多西少;夏秋多,冬春少;占国土面积50%以上的华北、西北、东北地区的水资源量仅占全国总量的20%左右。近年来,随着人口增加、经济发展和城市化水平的提高,水资源供需矛盾日益尖锐,农业干旱缺水和水资源短缺已成为我国经济和社会发展的重要制约因素,而且加剧了生态环境的恶化。按现状用水量统计,全国中等干旱年缺水358亿立方米,其中农业灌溉缺水300亿立方米。20世纪90年代以来,我国农业年均受旱面积达2000万公顷以上,全国660多个城市中有一半以上发生水危机,北方河流断流的问题日益突出,缺水已从北方蔓延到南方的许多地区。由于地表水资源不足导致地下水超采,全国区域性地下水降落漏斗面积已达8.2万平方公里。 发达国家的农业用水比重一般为总用水量的50%左右。目前,我国农业用水比重已从1980年的88%下降到目前的70%左右,今后还会继续下降,农业干旱缺水的局面不可逆转。北方地区水资源开发利用程度已经很高,开源的潜力不大。南方还有一些开发潜力,但主要集中在西南地区。 我国农业灌溉用水量大,灌溉效率低下和用水浪费的问题普遍存在。目前全国灌溉水利用率约为43%,单方水粮食生产率只有10公斤左右,大大低于发达国家灌溉水利用率70-80%、单方水粮食生产率2.0公斤以上的水平。通过采用现代节水灌溉技术改造传统灌溉农业,实现适时适量的“精细灌溉”,具有重要的现实意义和深远的历史意义。在灌溉系统合理地推广自动化控制,不仅可以提高资源利用率,缓解水资源日趋紧张的矛盾,还可以增加农作物的产量,降低农产品的成本。 本次设计是采用PLC控制多路不同的土壤湿度,浇灌的开启和停止完全由土壤的湿度信号控制,能使土壤的湿度值保持在作物生长所需要的最佳范围之内。这样既有利于作物的生长,又能节约宝贵的水资源。 关键词:自动浇灌; PLC; 湿度传感器;农业自动灌溉系统
灌溉系统设计
灌溉系统设计 草坪喷灌系统简介 (Introduction of Turf Irrigation System) 灌溉是弥补自然降水在数量上的不足与时空上的不均、保证适时适量地满足草坪生长所需水分的重要措施。以往的草坪绿化工程,很多没有配套完整的灌溉系统,灌水时只能采用大水漫灌或人工洒水。不但造成水的浪费,而且往往由于不能及时灌水、过量灌水或灌水不足,难以控制灌水均匀度,对草坪的正常生长产生不良影响。随着城镇建设的不断发展,城市人口大量集中,工业和生活用水迅速增加,旅游、休闲、运动场及居民小区等各种绿地面积越来越大,城市供水的紧张状况日益突出。传统的地面大水漫灌已不能满足现代草坪灌溉的要求,采用高效的灌水方式势在必行。 喷灌,以其节水、节能、省工和灌水质量高等优点,越来越被人们所认识。近年来草坪喷灌发展很快,有逐步取代人工地面灌溉的趋势。 一、草坪喷灌的特点 喷灌系统的设计和管理必须适应草坪的特点,才能满足其需水要求,保证正常生长。 1.喷灌设备的安装不能影响草坪的维护作业。草坪需要经常性的修剪、植保、施肥等,这些作业往往由机械完成。因此,除应选择草坪专用埋藏式喷头外,同时需精心施工,使之避免与草坪上的机械作业发生矛盾。 2.设备选型和管网布置应适应草坪的种植方式。由于景观的需要,园林绿化中草坪的种植地块很多不是规则的形状,如高尔夫球场,且有时同一工程中的不同地块呈零星分布,增加了喷灌系统中设备选型和管网布置的难度。 3.灌水管理应与草坪病害防治结合起来。很多草坪病害,特别是真菌类病害与草坪叶面和土壤湿度关系密切。在灌水管理中,制定合理的灌溉制度,包括灌水周期、灌水时间、灌水延续时间等,对控制草坪病害十分重要。 4.喷灌系统在满足草坪需水要求的同时,需充分注意景观和环境效果。精心设计的喷灌系统,通过正确选择喷头和进行喷点的布置,不仅能满足草坪需水,而且在灌水时可以形成水动景观效果。 二、喷灌系统的组成 一个完整的喷灌系统一般由喷头、管网、首部和水源组成。 1.喷头:喷头用于将水分散成水滴,如同降雨一般比较均匀地喷洒在草坪种植区域。 2.管网:其作用是将压力水输送并分配到所需灌溉的草坪种植区域。由不同管径的管道组成,分干管、支管、毛管等,通过各种相应的管件、阀门等设备将各级管道连接成完整的管网系统。现代灌溉系统的管网多采用施工方便、水力学性能良好且不会锈蚀的塑料管道,如PVC管、PE管等。同时,应根据需要在管网中安装必要的安全装置,如进排气阀、限压阀、泄水阀等。
基于单片机的节水灌溉自动控制系统设计
本科生毕业设计 摘要 自动控制节水灌溉技术代表了农业现代化的发展状况,灌溉系统自动化水平比较低下是制约我国高效农业发展的主要原因。本文就此问题研究了基于单片机的节水灌溉自动控制系统,系统对土壤湿度进行监控,并按照农作物的要求进行适时适量的灌水,其核心部分是单片机控制部分,主要对灌溉控制技术以及系统的硬件设计,软件编程各个部分进行深入的研究。 控制部分以单片机为核心,研制了一种基于单片机的节水灌溉自动控制系统。介绍了系统总体结构、单片机系统主机电路、数据采集处理电路、I/O口的扩展电路。为了进行大规模灌溉工程的监控,采用分布式控制模式,以提高控制系统的可靠性、降低系统的成本。 该套基于单片机控制的节水灌溉自动控制系统造成本低,体积小、安装方便、抗干扰性强、运行可靠,相比其他控制方式来说,性价比高,更易形成产品,便于推广应用。这是我国灌溉自动控制技术的一种新尝试,为目前农业在较低生产力水平的状况下,向智能化、市场化方向发展开辟了一条新途径。 关键词: AT89C51单片机;湿度传感器;A/D转换;采样;芯片 1
本科生毕业设计 ABSTRACT The level of auto-control water-saving irrigation technology reflects the development condition of agriculture modernization.The low automatic level of irrigation system is the main reason that prevented our agriculture’s development.As to this condition,this paper mainly studies the water-saving irrigation system that controlled by MCU.This system can supervise humidity.it can irrigate to the demand of the farm crops with right amunt of water at well time.The control part that consists of MCU is its core.Research work had been carried on irrigation control technology,hardware and software program and so . The control that consists of MCU is its core.A set of automatic water-saving system which is controlled by sing-chip controller have been developed in this paper.The overall structure of system、the main circuit of the MCU system、data-collecting circuit、I/O expanding circuit are all the designed.For monitoring large-scale irrigation system,we use distributional control model to enhance stability of the system de reduce the cost. It is small,easy to fit,a strong capability to resist interfere and low-cost.So the control system is more economic compared to other control system such as thuter system and all these demonstrate this production is adept to be popularized.This work is a fresh attempt to bring our agriculture into an advanced stage,which now is relative to be backward greenhouse control technique,especially on the aspect of nutrient liquid supplying when crops cultivated on tissue. Key words: AT89C51 MCU; Humidity Sensor; A/D transform; Sampling; Chip 2
恒压供水系统设计
目录 1 摘要 (1) 1.1 引言 (1) 1.1变频恒压供水系统理论分析 (2) 1.1.1变频恒压供水系统的原理 (2) 1.1.2 变频恒压控制理论模型 (2) 1.2恒压供水控制系统构成 (3) 2 变频恒压供水系统设计 (4) 2.1 设计任务及要求 (4) 2.2 系统主电路设计 (5) 2.3 系统工作过程 (6) 3 器件的选型及介绍 (7) 3.1 变频器简介 (7) 3.1.1 变频器的基本结构与分类 (7) 3.1.2 变频器的控制方式 (7) 3.2 变频器选型 (9) 3.2.1 变频器的控制方式 (9) 3.2.2 变频器容量的选择 (9) 3.2.3 变频器主电路外围设备选择 (11) 3.3 可编程控制器(PLC) (13) 3.3.1 PLC的定义及特点 (13) 3.3.2 PLC的工作原理 (14) 3.3.3 PLC及压力传感器的选择 (14) 4 PLC编程及变频器参数设置 (15) 4.1 PLC的I/O接线图 (15) 4.2 PLC程序 (16) 4.3 变频器参数的设置 (20) 4.3.1 参数复位 (20) 4.3.2 电机参数设置 (20) 总结 (21) 参考文献 (22)
摘要 以变频器为核心结合PLC组成的控制系统具有高可靠性、强抗干扰能力、组合灵活、编程简单、维修方便和低成本等诸多特点,变频恒压供水系统集变频技术、电气技术、防雷避雷技术、现代控制、远程监控技术与一体。采用该系统进行供水可以提高供水系统的稳定性和可靠性,方便的实现供水系统的集中管理与监控;同时系统具有良好节能性,这在能量日益紧缺的今天尤为重要,所以研究设计该系统,对于提高企业效率以及人民的生活水平、降低能耗等方面具有重要的现实意义。 关键字:恒压供水、变频器、PLC控制器 Combined with frequency as the core component of the PLC control system with high reliability, strong anti-interference ability, combined flexible programming, easy maintenance and low cost, and many other characteristics, frequency conversion constant pressure water supply system combines technology, electrical technology, lightning lightning protection technology, modern control, remote monitoring technology and integration. Using the system for water supply can improve the stability and reliability of water supply systems, water supply systems to facilitate the implementation of centralized management and monitoring; the same time the system has good energy efficiency, which is an increasing scarcity of energy is particularly important today, so the study design of the system, for improving efficiency and living standards, reduce energy consumption has important practical significance Keywords: constant pressure water supply, inverter, PLC controller
自动化智能滴灌系统设计方案
自动化智能滴灌控制系统设计方案 陕西颐信网络科技有限责任公司 西安天汇远通水利信息技术有限责任公司
目录 一. 系统概述............................................................................................................ - 3 - 二. 系统组成............................................................................................................ - 4 - 三. 通信网络............................................................................................................ - 5 - 四. 功能设计............................................................................................................ - 6 - 4.1. 监测中心级设计 ...................................................................................... - 6 - 4.2. 首部控制级设计 ...................................................................................... - 6 - 4.3.1. 设计原则 ....................................................................................... - 7 - 4.3.2. 主要功能 ....................................................................................... - 7 - 4.3.3. 硬件设计 ....................................................................................... - 8 - 4.3.4. 软件设计 ..................................................................................... - 10 - 4.3. 田间控制级设计 .................................................................................... - 13 - 4.3.1. 田间控制器主要功能 ................................................................. - 13 - 4.3.2. 田间控制器性能指标 ................................................................. - 14 - 4.3.3. 田间路由器节点主要功能 ......................................................... - 14 - 4.3.4. 田间路由器节点性能参数 ......................................................... - 14 - 4.3. 5. 供电方式 ..................................................................................... - 14 - 五. 系统特性.......................................................................................................... - 15 - 六. 设计研究意义.................................................................................................. - 16 -
水塔供水系统设计说明
自动化应用软件实训设计题目:水塔供水系统 班级: 姓名: 学号: 指导教师: 设计时间:
目录 引言......................................................................... - 1 - 1.设计方案及原理.......................................................... - 1 - 2.界面设计................................................................. - 2 - 2.1内存变量的定义...................................................... - 2 - 2.2 登录界面设计 ....................................................... - 3 - 2.3水塔液位控制主界面的设计.......................................... - 4 - 2.4 实时曲线与历史曲线 ................................................ - 4 - 2.5 报表打印............................................................ - 6 - 2.6 报警窗口设计 ....................................................... - 6 - 2.7 数据库操作画面..................................................... - 7 - 3.命令语言设计 ............................................................ - 7 - 3.1 按钮的设计.......................................................... - 7 - 3.2 管道流动条件的设计 ................................................ - 7 - 3.3历史报表命令语言 ................................................... - 8 - 3.4系统运行命令语言 ................................................... - 8 - 总结........................................................................ - 10 -
基于单片机的大棚智能节水灌溉系统设计
基于单片机的大棚智能节水灌溉系统设计 大棚智能节水灌溉系统设计采用AT89C51单片机为信息处理核心,系统主要由土壤湿度传感器、空气温度传感器、空气湿度传感器、液晶显示电路和故障报警电路等组成。系统在进行智能灌溉的同时,还能调节大棚内空气的湿度和温度。经过测试,该系统可以在无人的情况下实现智能节能,并根据作物的需要进行适时、有效的灌溉,并有效的调节大棚内的湿度和温度,做到定时喷洒农药。 标签:AT89C51单片机;节水灌溉;控制系统 随着农业现代化的发展,智能节水灌溉的需求越来越大[1],然而,智能灌溉由于成本等因素发展缓慢[2]。本设计通过对大棚内土壤湿度的控制和大棚内空气温度和湿度分析,设计了一个简单经济实用的智能灌溉系统。 1 系统总体设计 系统总原理方框图如图1所示。硬件电路包括了传感器电路、单片机数据处理电路、液晶显示电路,继电器电磁阀电路,农药喷洒电路。首先,数据采样电路将土壤湿度传感器采集到的数据通过A/D转换后,将信息传递给单片机,然后单片机将测量的数据通过处理后在液晶显示屏上反应出来,同时控制电路将根据指令完成操作。 2 硬件部分设计 (1)系统主电路布局。该设计包括DH11温湿度电路,LED显示电路,晶振电路,继电器电池阀驱动电路,继电器风扇驱动电路,DH11温度湿度电路将土壤湿度通过A/D转换将数据传输给单片机主芯片,然后,单片机主芯片首先对数据做出判断,然后会分别对各个下属电路做出指示,LED电路的作用是显示工作的状态,农药喷洒系统的作用是定时定量喷洒农药。(2)DH11温度传感器电路设计。温度传感器采用DH11温湿度传感器,由于传感器的电阻较小,通电作用下,很容易被烧坏[3],故此电路会选择串联一个电阻值较大的电阻,该电路中串联的电阻选择的是R3=43K的电阻来保护传感器。(3)DH11湿度传感器电路设计。土壤湿度传感器采用DH11,和温度传感器一样,R2的作用是保护传感器不被烧坏,这里R2取47K,3端口用不到,故此悬空。(4)继电器风扇驱动电路。当大棚中的空气湿度比设定好的温度高时,温度传感器将接受到的信号经过A/D转化后传输给单片机,单片机会调用散热子程序,完成三极管导通,使的继电器闭合,开启散热功能,当温度降到设定温度时,风扇就会停止转动,散热就会结束[4]。同样的,当空气湿度高于设定湿度时,电风扇会转动降低湿度,当湿度低于设定湿度时,电扇就会停止转动,散湿结束。 3 系统软件设计 3.1 系统主程序流程图
给水系统设计
给水系统的功能 发电厂给水系统的任务是(包括脱过氧的凝结水和经过化学处理的补充水)从除氧器贮水箱送到锅炉的省煤器进口。给水在输送的过程中,要进行加热并升压,以满足锅炉对给水的温度和压力的要求,整个汽水循环的热效率的到提高。 加热给水的热源,来自汽轮机的各级抽气,提高给水的抽气,就要借助给水泵。给水泵是发电厂简历汽水热力循环必不可少的设备 给水系统除向锅炉供水之外,还得向锅炉过热器的减温装置提供减温水,以调节主蒸汽的温度;在给水泵中间级抽头,向加热器的减温装置供给减温水和事故喷水的用水。 在装有汽轮机旁路系统的发电厂,给水系统要向高压旁路系统供水,以降低主蒸汽排入再热器冷段蒸汽的温度,是锅炉出口和再热器出口的蒸汽压力和温度得到调整。 本次设计主要针对主给水管道的温度和压力的设计。 一、机组简介 锅炉 形式:超临界、单炉膛、一次中间再热、平衡通风、固态排渣、全钢架悬吊结构、露天布置燃煤直流锅炉 锅炉最大连续出力:1950t/h 过热器出口压力:25.5MPa 过热器出口温度:569℃ 再热器出口压力:4.54MPa 再热器出口温度:569℃
给水温度:280.4℃ 锅炉效率(LHV):93.84 汽轮机 形式:超临界参数、一次中间再热、单轴、三缸四排汽、8级回热抽汽凝汽式汽轮机 额定功率:660MW 额定进汽量:1900t/h 主汽阀额定进汽压力:24.2MPa(a) 主汽阀进汽温度:566℃ 再热蒸汽额定进汽压力:4.525MPa(a) 再热蒸汽进汽温度:566℃ 再热蒸汽额定流量:1525.5t/h 循环冷却水温度:143.1℃ 排汽压力:0.00747MPa(a) 排汽量:1038.82t/h 机组净热耗:7942kJ/kW.h 发电机 型式:水-氢-氢冷却、静态励磁发电机 额定功率:600MW 额定容量:667MVA 电压:20kV 频率:50Hz
自动化灌溉设计方案
目录 自动化灌溉与信息化管理系统方案 (2) 1、现场智能感知平台: (4) 1.1、井房首部设备智能监控系统 (5) 1.2、田间无线灌溉控制系统 (7) 1.3.无线土壤墒情监测系统 (10) 1.4.综合智能气象监测系统 (11) 2、无线网络传输平台 (14) 3、数据管理平台 (15) 4、应用平台(监控中心及移动管理控制端) (17) 5、主要技术参数 (20)
自动化灌溉与信息化管理系统方案 自动化灌溉与信息化管理系统是针对农业大田种植分布广、监测点多、布线和供电困难等特点,融合最新的物联网和云计算技术,采用高精度土壤温湿度传感器和智能气象站,远程在线采集土壤墒情、气象信息,实现墒情自动预报、灌溉用水量智能决策、远程/自动控制灌溉等功能。 该系统根据不同地域的土壤类型、灌溉水源、灌溉方式、种植作物等划分不同类型区,在不同类型区内选择代表性的地块,建设具有土壤含水量,地下水位,降雨量等信息自动采集、传输功能的监测点;通过灌溉预报软件结合信息实时监测系统,获得作物最佳灌溉时间、灌溉水量及需采取的节水措施为主要内容的灌溉预报结果,定期向群众发布,科学指导农民实时实量灌溉,达到节水目的。 系统组成: 大田灌溉自动化与信息化管理系统分为现场智能感知平台、无线网络传输平台、云数据管理平台、应用平台(监控中心及移动管理控制端)四个层次,其中,田间脉冲电磁阀、无线阀门控制器、远程水泵智能控制器、云服务器、主控制中心和村级(企业)控制中心、移动控制终端等组成灌溉无线控制系统,能够实现现地无线遥控、远程随时随地监控、轮灌组定时自动轮灌等控制方式,并且实时监测机井和阀门状态,灌溉流量和管网压力,保障运行安全,及时提示报警信息。在此基础上,扩充田间土壤墒情监测、农田气象监测、作物和泵