人体运动视频关键帧优化及行为识别
行人检测与跟踪国内外研究现状
行人检测与跟踪国内外研究现状 1.2行人检测与跟踪国内外研究现状 视觉跟踪和目标检测是计算机视觉领域内较早开始的研究方向。经过几十年的积累,这两个方向已经取得了显著的发展。然而,很多方法只是在相对较好地程度上解决了一些关键问题。并且仍旧有不少一般性的关键问题未得到有效的解决。国内外很多研究机构都在致力于研究和发展这两个方向。近些年这两个方向持续发展,涌现了很多比较优秀的方法。国外的很多大学和研究机构(如卡内基梅隆大学、南加州大学和法国国家计算机科学与控制研究所等)都有计算机视觉小组,长期地研究视频跟踪和目标检测。国内的很多大学和研究所等(如清华大学、上海交大和自动化所等)也有相关的研究小组,并取得了一些优秀的研究成果。 1.2.1行人检测技术国内外研究现状 中科院计算机科学重点实验室孙庆杰等人利用基于侧影的人体模型及其对应的概率模型,提出了一种基于矩形拟合的人体检测算法。中科院自动化所谭铁牛等对人运动进行视觉分析,其核心是利用计算机视觉技术从图像序列中检测、跟踪、识别人并对其行为进行理解与描述,它主要应用在视觉监控领域和基于步态的身份鉴定。步态识别就是根据人们走路的姿势进行身份鉴定,依据人体行走运动很大程度上依赖于轮廓随着时间的形状变化的直观想法,提出一种基于时空轮廓分析的步态识别算法;基于行走运动的关节角度变化包含着丰富的个体识别信息的思想,提出一种基于模型的步态识别算法。实验结果表明该算法不仅获得了令人鼓舞的识别性能,而且拥有相对较低的计算代价。但是该方法只能检测出运动的行人。 西安交通大学郑南宁等研究了利用支持向量机识别行人的方法,通过稀疏Gabor滤波器提取行人样本图像中行人的特征,然后利用支持向量机来训练所提取的样本特征,并用训练得到的分类器通过遍历图像的方式将图像中可能属于行人的窗口提取出来。尽管用Gabor滤波器提取特征效果相对较好,但耗时很长,不适合于实时图像的处理。 上海交通大学田广等提出了一种coarse-to-fine的行人检测方法,将一个人建模成人体自然部位的组装,人体的所有部位包括头肩、躯干和腿、采用绝对值类Haar特征集和Edgelet特征集,在这些特征集上,采用softcascade训练各个部位的检测器和全身检测器。首先采用全身检测器在整个图像中产生候选行人区域,然后用基于贝叶斯决策的组合算法进一步确定候选区域中的行人。实验结果表明该算法有很好的检测性能能在杂乱的自然场景中有效的检测行人。但该方法的识别率是78.3%,识别率不高,且该模型比较难构建,模型求解也比较复杂。 目前,在国外许多文献中提出了基于机器视觉的行人检测方法,意大利帕尔玛大学的AlbertoBroggi教授在ARGO项目中采用一种基于外形的行人检测算法。算法首先根据行人相对于垂直轴有很强的垂直边缘对称性、尺寸和外貌比例等在
人体运动的检测和识别研究
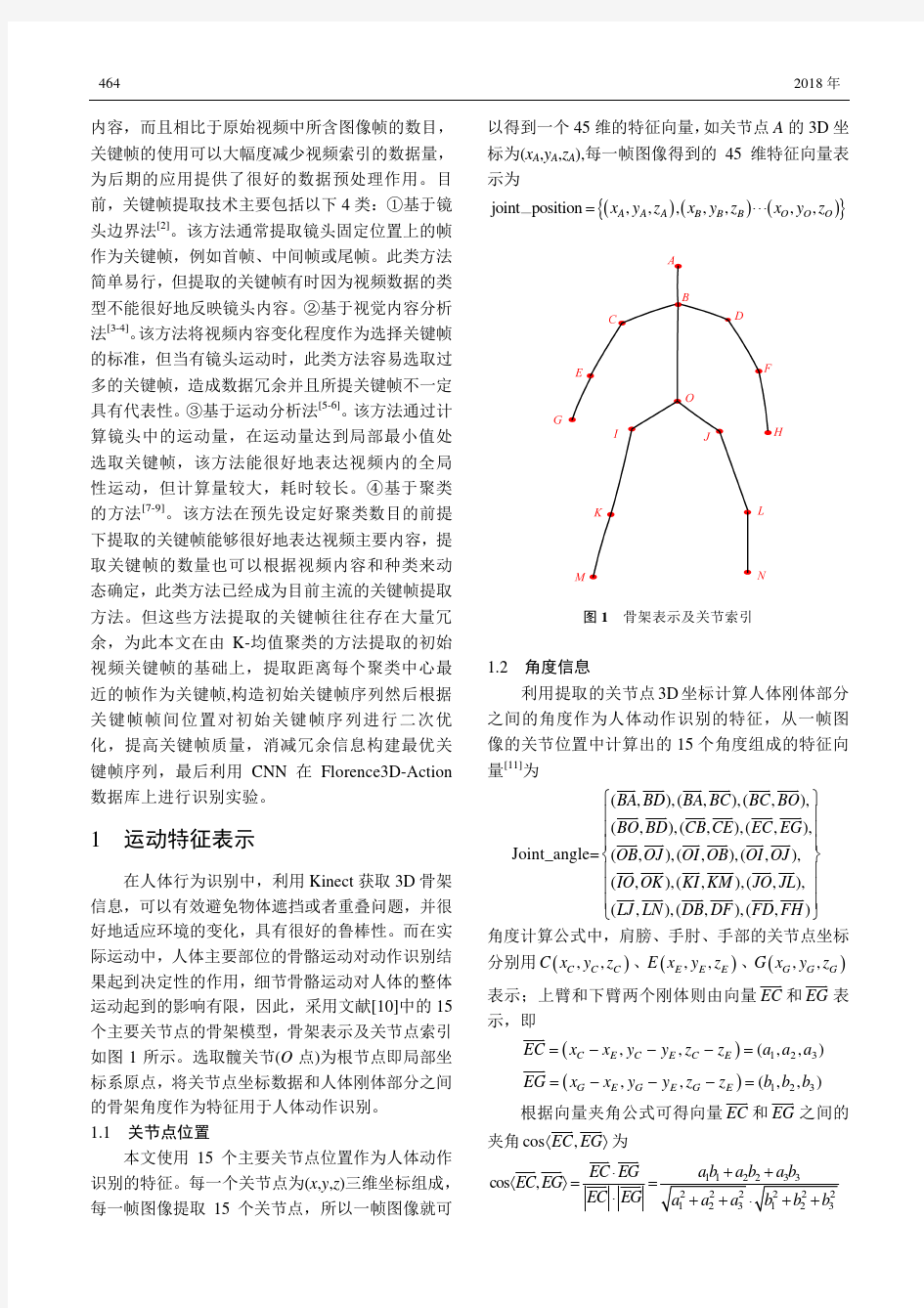
模式识别中文核心期刊《微计算机信息》(测控自动'f:.15)2008年第24卷第2-1期文章编号:1008—0570(2008)02…1021002 人体运动的检测和识别研究 StudyonDetectionandIdentificationofHumanMovement (北京榭吏大学)宋修雷王志良 SONGXIULEIWANGZHILIANG 摘要:本文针对人体运动视觉分析中的行为理解和分析等高层视觉问题进行分析,研究了一种静止摄像机条件下的行为理解和分析的算法,它以运动序列中的关键帧为基础,针对关键帧提取人体的骨架信息,然后通过Hu不变矩来提取特征,最后组成特征向量,通过对HMM模型的训练来识别特定运动序列的语义。 关键词:运动识别:计算机视觉;I-EVllM 中图分类号:TP391.4文献标识码:A Abstract:Thispaperfocusesonvisualanalysisofhumanmovementandtheunderstandingofhighlevelvisualproblems.Itgivesanalgorismtocomprehend andanalysispeopleSmovementifthecameraisnotmoved.Wepresentanalgorithmbasedonkeyframes,thistechniquecanbemoreeffectiveintheoriginalsequencebyreducingtheinterferenceofdetectionandidentification. Keywords:movementidentification,computervision,HMM 1引言 计算机视觉是计算机科学和人工智能领域的一个重要分支.它研究的主要内容是怎样利用各种成像系统代替视觉器官作为信号输入手段,用计算机代替大脑完成对信息的处理和解释。计算机视觉的最终研究目标,就是使计算机能象人那样通过视觉观察和理解世界。 运动物体的检测、跟踪和行为的理解与描述是计算机视觉领域的一个重要课题。也是计算机能否象人那样通过视觉观察和理解世界的关键所在。目前在运动物体检测领域,国内外有关这方面的研究很多,但是目前的许多方法都受到了一定条件的局限性。比如我们在使用背景差对运动目标进行检测时,发现了这种方法受光线亮度变化的影响很大,同时当背景中有物体移人或移出时.这种方法检测的效果正确性受到很大影响。对行为的理解与描述国内外的文献相对较少。可以说是一个比检测和跟踪更加困难的研究领域。针对这些问题,我们提出一种能够在简单背景下对人体行为进行理解和描述的方法。该方法将运动的检测、跟踪和行为的理解和描述联系到一起,使两者相辅相成。解决了两者分离情况下研究中的难点问题。 2关键帧算法 直接比较的人体的运动来识别运动的语义是不可能的,因为人体区域随着肢体的摆动而呈现非刚性的变化。这里我们对运动序列进行分解,原则是提取运动序列中的关键帧进行分析。关键帧的定义是在运动方向发生变化的时刻对应的图像帧。从运动中来看,运动方向发生变化的时刻,必定是序列图像在水平或者是垂直方向的投影在时间轴上出现了极值。所以我们就可 宋修雷:硕士研究生 基金项目:本论文得到国家自然科学基金(N0.60573059)、 北京市“现代信息科学与网络技术”重点实验室基金 (No.TDXX0503)和北京科技大学重点基金的支持以根据这条规则来从运动序列中提取关键帧。一个完整的具有具体语义的运动序列可以由一个相对应的关键帧序列来表示。 通过关键帧的方法完成了对运动序列的第一次特征提取。图1是对关键帧提取的一个示例。图2是一个行走运动序列的关键帧表示。 图1关键帧的提取 彳彳kk 图2行走运动序列的关键帧表示 3特征提取 3.1骨架算法 首先要从待处理的序列图像中抽取出目标人体的轮廓,获 一210—360元,年邮局订阅号:82-946 万方数据
人体的运动系统
人体的运动系统 一、教学要求: 1、使学生知道运动系统由骨、骨骼肌、骨连结组成,了解人体的各种动作都是由肌肉 牵动骨骼完成,骨骼还具有支撑身体、保护内脏的功能。 2、使学生懂得什么是骨折,简单了解骨折后的应急办法。 3、传授给学生运动保健的知识,教育学生养成良好的行为习惯,改掉挑食、偏食的毛 病。 二、教学重点与难点: 教学重点:教给学生保健方法。 教学难点:指导学生学会一些应急方法(如骨折、脱臼后的注意事项)。 三、课前准备: 人体骨骼模型或挂图,人体肌肉挂图,夹板、绷带等。 四、教学时间: 一课时 五:教学过程: 1、由日常平时会做哪些运动? (学生回答) 师:刚才大家说的运动,是我们身体的运动系统在发挥作用。 2、介绍运动系统及其作用 ①介绍运动系统的组成。 师:你们知道人的运动系统包括哪些部分吗? 生:包括骨、骨骼肌和骨连结。 师:(出示人体骨骼模型或挂图,人体肌肉挂图)对!人的运动系统由骨、骨骼肌和骨连结组成。(指示图上的关节处)运动系统中的骨连结主要是关节。(请学生分别触摸各自的肘关节、膝关节及其周围的肌肉、骨) ②说明运动系统的作用。 师:吃饭、走路、弯腰时,各有哪些骨、肌肉、关节在运动? (学生回答) 师;人的各种动作都是由肌肉牵动而完成的。 ③解说骨骼的支撑、保护作用。 师:运动系统的作用不只是运动,比如说,人的骨骼把整个人的身体各部分都支撑、悬挂起来,如果没有骨骼会怎样?骨骼还有什么作用? (学生思考、回答。教师确认骨骼有支撑作用) 师:人脑外部包裹着头骨,这时的骨骼又起了什么作用? 生:有保护大脑的作用。 师:综合来看,人的运动系统除了能使人运动外,还有着支撑身体和保护内脏器官的作用,因此我们必须注重运动系统的保健。 3、引导学生了解 ①教育学生注重运动系统的保健。 师:你们见过驼背、斜肩、罗圈腿、鸡胸的人吗?他们是怎样的?你觉得这样对他们的身体、行动有利吗? (学生回答) 师:你们知道他们为什么会变成这样的吗?
人体运动中的量的特征
?人体运动中的量的特征: 瞬时性 矢量性 相对性 独立性 1.质点的运动包括直线运动和曲线运动。 ?人体运动的始发姿势 在康复医学中,为人体运动的始发姿势,即:身体直立,面向前,双目平视,双足并立,足尖向前,双上肢下垂于体侧,掌心贴于体侧。其中手的姿势(又名中立位)是手的掌心贴于躯干两侧,是唯一有别于解剖学中的人体基本姿势的,应提起注意。 ?自由度 关节面的形态及结构决定了关节可能活动的轴,自由度与关节活动轴有关,关节轴有几个活动方向,就有几个自由度。 例如,髋关节可作屈伸、内收外展、内旋外旋三个轴的运动,有三个自由度。 力三要素:力的大小、力的方向、力的作用点。 第二节人体运动中的动力学 ?内力虽然可引起人体力学系统各部分之间的相互作用,但不能引起人体整体运动状态的改变。 ?五.人体运动中常见的力 (一)重力 (二)弹力 (三)摩擦力1.静摩擦力 2.滑动摩擦力 3.滚动摩擦力 ?(四)支撑反作用力 (五)流体作用力 (六)向心力和离心力 (3)鞭打:在克服阻力或自体位移时,上肢各环节依次加速、制动,使末端环节产生极大速度的动作形式,叫鞭打动作。如投掷。 1.上肢的基本运动形式(1)推 (2)拉 (3)鞭打 2.下肢的基本运动形式 (1)缓冲:在克服阻力时,下肢由伸展态转为较为屈曲态的动作过程。如跳远前起跳时摆动腿的动作。
(2)蹬伸:在克服阻力时,下肢由屈曲态主动转为伸展态的动作过程。如跳远前起跳时起跳腿的动作。 (3)鞭打:在完成自由泳的两腿打水动作时,下肢各环节有类似上肢的鞭打动作。 杠杆原理在康复治疗学的应用 1.省力:当阻力一定时通过缩短阻力臂/延长力臂来减少阻力矩,可以达到省力的目的。 第四节人体运动的形式和原理 2.增速 在做投掷或击打动作时,为了提高肢体未端的运动速度,应当尽量伸展肢体。通过增大阻力臂来增加肢端速度 ?2骨按形状可分为长骨、短骨、扁骨和不规则骨等. ?3.结构 骨组织由骨质构成,分密质和松质。 骨密质质地致密,耐压性较大,分布于骨的表面。 骨松质呈海绵状,由相互交织的骨小梁排列而成,分布于骨的内部,骨小梁的排列与骨所承受的压力和张力的方向一致,因而能承受较大的重量。 颅盖骨表层为密质,分别称外板和内板,外板厚而坚韧,富有弹性,内板薄而松脆,故颅骨骨折多见于内板。 ?骨膜:覆盖在新鲜骨的表面(关节面除外)。骨膜由纤维结缔组织构成,含有丰富的神经和血管,对骨的营养、再生和感觉有重要作用。骨膜可分为内外两层,外层致密有许多胶原纤维束穿入骨质,使之固着于骨面。内层疏松有成骨细胞和破骨细胞,分别具有产生新骨质和破坏骨质的功能,幼年期功能非常活跃,直接参与骨的生成;成年时转为静止状态,但是,骨一旦发生损伤,如骨折,骨膜又重新恢复功能,参与骨折端的修复愈合。如骨膜剥离太多或损伤过大,则骨折愈合困难。 ?6.骨的代谢 骨构建(modeling):在人的生长期,骨的形成大于骨的吸收,骨量呈线性增长,表现为骨皮质增厚,骨松质更密集,这一过程称为骨构建。 骨重建(remodeling):成人时期,骨生长停止,但骨的形成和吸收还在继续,处于一种平衡状态,称为骨重建。 ?7.骨的钙化 概念:在成骨细胞合成并分泌骨的有机成分(有机基质)后、在一定的条件下无机盐有序地沉积于有机质内的过程。
人体下肢运动分析
大连理工大学 硕士学位论文 人体下肢运动分析 姓名:王晏 申请学位级别:硕士专业:通信与信息系统指导教师:孙怡 20050317
摘要 近些年来,人体运动的跟踪与分析在图像处理和计算机视觉领域引起许多学者的关注。这一课题在智能监视系统、虚拟现实、高级用户接口、运动分析和基于模型的图像编码等方面具有广阔的应用前景。利用图像序列进行人体运动的跟踪与分析包含四个基本内容:(1)从背景中提取运动目标;(2)从运动目标中分出人体目标;(3)运动人体的跟踪;(4)人体行为的理解与描述。其中,人体运动的跟踪和标定是人体运动跟踪与分析过程的关键,是进一步识别和理解人体运动行为的基础。本文提出了一种行走人体下肢关节点定位的算法。该算法是根据人行走时呈现的几何特性对人体的下肢关节点进行定位。 行走人体下肢关节定位算法处理的是由摄像机摄入的视频图像序列。首先经过背景去除,把人体区域从图像中提取出来。在得到干净的人体区域后,就可以获得人体的高度和宽度参数,以便进一步实现下肢关节点的定位。 经过背景去除和获得高度参数后,就要根据人体行走时所呈现的几何特征进行下肢关节点的定位。本文首先对侧面行走人体下肢关节点进行了定位。人在侧面行走时腿部长度是无失真的,因此,根据腿部的长度约束和关节点的运动约束进行了关节点定位。本文继而对正面行走人体下肢关节点进行了定位,对于正面行走的人体,其腿部长度在二维图像中有时会出现失真,因此,不能简单的根据腿部的长度约束进行定位。本文针对正面行走人体腿部边缘特性,结合腿部长度约束对膝关节进行了定位,并且根据腿部边缘特点对人体小腿长度进行了调整,运用调整后的小腿长度约束对人体踩关节进行了定位。在侧面行走人体和正面行走人体下肢关节定位的研究基础上,进一步研究了任意行走姿态下人体髋关节和膝关节的定位。根据人体行走时腿部的边缘信息用直线拟合的方法,并且结合腿部长度约束进行了膝关节的定位。 论文给出了侧面、正面以及任意行走姿态下人体下肢关节点定位的实验结果。对于侧面行走人体,本文检验了两种人体模型软件生成的人体行走序列,并且对实际拍摄的侧面人体行走序列也进行了髋关节和膝关节的定位。对于正面和任意行走姿态下的人体,只检验了由POSER3.0生成的模型序列。实验结果表明,本文所提出的算法可以对行走人体的下肢关节点进行较为准确的定位,并且算法简单易行,可
(最新版)人体行为检测和识别毕业设计
本科生毕业设计(论文) 题目:人体行为检测与识别 姓名: 学号: 系别: 专业: 年级: 指导教师: 2015 年 4 月20日 独创性声明 本毕业设计(论文)是我个人在导师指导下完成的。文中引用他人研究成果的部分已在标注中说明;其他同志对本设计(论文)的启发和贡献均已在谢辞中体现;其它内容及成果为本人独立完成。特此声明。 论文作者签名:日期: 关于论文使用授权的说明 本人完全了解华侨大学厦门工学院有关保留、使用学位论文的规定,即:学院有权保留送交论文的印刷本、复印件和电子版本,允许论文被查阅和借阅;学院可以公布论文的全部或部分内容,可以采用影印、缩印、数字化或其他复制手段保存论文。保密的论文在解密后应遵守此规定。 论文作者签名:指导教师签名:日期:
人体行为检测与识别 摘要 人体行为检测与识别是当前研究的重点,具有很高的研究价值和广阔的应用前景。主要应用在型人机交互、运动分析、智能监控和虚拟现实也称灵境技术(VR)领域,对于研究人体检测和识别有着重要的意义。因为人的运动的复杂性和对外部环境的多变性,使得人们行为识别和检测具有一些挑战。对人类行为和检测的研究目前处于初级阶段,有待进一步研究和开发。 本文基于matlab人体行为识别和检测的研究,本文主要研究的是从图像中判断出目标处于何种行为,例如常见的走、坐、躺、跑、跳等行为的识别。从现有的很多主流研究成果来看,最常见的行为识别系统结构包括几个模块:目标检测、目标跟踪、行为识别。本文首先对图像进行判断是否有人体目标,识别出人体后对图像进行灰度化,在对灰度图像用背景差法与背景图像比对,最后,比对提取出的人体来判断人体处于何种行为。 关键词:matlab,肤色识别,行为检测
人体目标检测与跟踪算法研究
人体目标检测与跟踪算法研究 摘要:近些年以来,基于视频中人体目标的检测与跟踪技术研究越来越被重视。然而,由于受到目标自身特征多样性和目标所处环境的复杂性和不确定性的影响,现存算法的性能受到很大的限制。本文对目前所存在的问题进行了分析,并提出了三帧差分法和改进阈值分割法相结合的运动目标检测算法和多特征融合的改进运动目标跟踪算法。这两种算法不仅可以准确有效的检测出运动目标而且能够满足实时性的要求,有效的解决了因光照变化和目标遮挡等情况造成的运动目标跟踪准确度下降或跟踪目标丢失等问题。 关键词:三帧差分,Camshift,阈值分割 Research Based on Human Target Detectionand Tracking Algorithm Abstract: In recent years, human object detection and tracking become more and more important. However the complexity, uncertainty environment and the target’s own diversity limit the performance of existing algorithms. The main works of this paper is to study and analysis the main algorithm of the human object detection and tracking, and proposes a new moving target detection method based on three-frame difference method and threshold segmentation and improved Camshift tracking algorithm based on multi-feature fusion. These algorithm can satisfy the real-time, while accurately and efficiently detect moving targets, and also effectively solves the problem of tracking object lost or misplaced under illumination change or target occlusion. Keywords: three-frame difference, Camshift, threshold segmentation 一、绪论 (一)选题的背景和意义 人类和动物主要通过眼睛来感受和认知外部世界。人类通过视觉所获取的信息占了60%[1],因此,在开发和完善人工智能的过程中,赋予机器视觉的功能这一操作极不可缺少。完善上述功能需要以许多技术为基础,特别是运动目标的检测与跟踪技术。近些年以来,此技术受到了越来越多的关注[2]。目前,此技术也在各领域得到了充分的应用,涵盖的领域有智能交通、导航、智能视频监控、精确制导、人机交互和多媒体视频编码压缩技术等。
人体行为识别技术
人体行为识别技术 在计算机视觉领域中,人体运动行为识别是一个被广泛关注的热点问题,在智能监控、机器人、人机交互、虚拟现实,智能家居,智能安防,运动员辅助训练等方面有巨大应用价值。行为识别问题一般遵从如下基本过程:数据图像预处理,运动人体检测、运动特征提取、特征训练与分类、行为识别。着重从这几方面逐一回顾了近年来人体行为识别的发展现状和常有方法。并对当前该研究方向上待解决的问题和未来趋势做了分析。行为理解可以简单地认为是时变数据的分类问题,即将测试序列与预先标定的代表典型行为的参考序列进行匹配。通过对大量行为理解研究文献的整理发现:人行为理解研究一般遵从特征提取与运动表征、行为识别、高层行为与场景理解等几个基本过程。 特征提取与运动表征是在对目标检测、分类和跟踪等底层和中层处理的基础上,从目标的运动信息中提取目标图像特征并用来表征目标运动状态;行为识别则是将输入序列中提取的运动特征与参考序列进行匹配,判断当前的动作处于哪种行为模型;高层行为与场景理解是结合行为发生的场景信息和相关领域知识,识别复杂行为,实现对事件和场景的理解。【2】 1、行为识别的应用 从应用领域的分类来讲,可以将人体运动分析的应用分成如下几个领域: ①智能监控 这里所指的“智能”包含两个方面的含义。一种“智能”是指系统能够在一定的场景中检测是否有人的出现(如通过检测人脸的方法)防止只是简单的通过 运动目标检测所造成的错误报警(例如因为动物活动或者刮风摇动树枝等等而造
成误报)。另外一种“智能”是指系统能够监视一定场所中人的活动,并对其行为进行分析和识别,跟踪可疑行为(如经常在重要地点徘徊等等行为)从而采取相应的报警措施。通常把报警系统设置于银行、机场、车站、码头、超市、办公大楼、住宅小区等地,以实现对这些场所的智能监控。 ②虚拟现实 跟踪现实世界人的姿态,从而创建一个虚拟的仿真场景,实现人与这个虚拟世界的交互。该领域的具体应用涉及视频游戏、虚拟摄影棚、计算机动画等方面。 ③高级用户接口 指可以通过对用户手势的识别来代替传统的鼠标和键盘输入,从而实现人与计算机之间的智能交互。此外,通过对手势语言的理解,还可以进行聋人与计算机之间的手语交流。 ④运动分析 人体运动分析可以运用于基于容的视频检索领域。例如可以检索在运动会上单杠比赛中运动员的杠上动作。这样可以节省用户大量的查询视频资料的时间和精力。另外一种应用是用于各种体育项目中,提取运动员的各项技术参数(如关节位置、角度和角速度,等等),通过分析这些信息,可以为运动员的训练提供指导和建议,有助于提高运动员的训练水平。此外,还可以用于体育舞蹈动作的分析,以及临床矫形术的研究等领域。 ⑤基于模型的视频编码 通过提取一定的静态场景中人物的形态特征参数和3D姿态参数,以较低的数据量对视频数据流加以描述,实现视频数据的压缩和低比特率传送。可以用于在因特网上展开远程视频会议以及VOD(Video-On-Demand)视频点播。
人体运动系统
第一篇人体运动系统 运动系统由骨、关节和肌肉等组成,其功能是实位移或保持姿势。人体最基本的位移运动是杠杆运动。其中骨是运动杠杆,关节是支点肌肉是运动动力。肌肉运动的主要部分,骨和关节是运动的被动部分。 第一节骨的概述 正常成年人共有206块骨,其中170块成双。177块直接参与随意肌运动。 一、骨的形态各分类 1、长骨:分布在四肢,两端的上下为上端和下端,中间为骨干。作用;主要 起运动杠杆作用。 2、短骨: 分布在手腕和足的位置,一般是立方体,常有六个面, 它们短小坚固,适合于人手和足的高度灵活的需要。 3;扁骨: 分布在头、胸一般成板状,薄而坚固,起保护作用。 4、不规则小骨: 呈不规规则形状。如;髋骨、椎骨、聂骨。 5、籽骨:被肌腱和韧带包围起来的骨。
按部位分类; 颅骨脑颅8 面颅14 共22块 听小骨6块 舌骨1块 颈椎7 胸椎12 椎骨26 腰椎 5 躯干骨肋骨24 骶椎 1 尾椎 1 胸骨 1 肩带骨 4 上肢骨游离部位 6 四肢骨 腰带骨2 下肢骨游离部位60
二、骨的构造 骨是器官,它是由骨组织、致密结缔组织、脂肪组织、网状组织等构成。 骨包括;骨膜、骨质、骨髓并有神经和血管分布。 1.、骨膜; 由致密结缔组织构成,被覆于除关节面以外的骨质表面,并有许多 纤维束伸入于骨质内。
《1》骨外膜;浅层中有丰富的血管、神经穿行。深层分化出的成骨细胞,有制造新骨质的作用骨膜作用,沿途有分支进入伏克曼氏管,再 分支伸入哈佛氏管,以营养骨质。 《2》骨内膜:深层细胞处于稳定状态,它使终保特分化能力。 内层:较疏松,衬在骨髓腔面,骨小梁的表面及哈佛氏管内,骨内膜中的细胞分化出的破骨细胞,使骨髓腔不断扩大。以形成新骨质和破坏、改造已生成的骨质,所以对骨的发生、生长、修复等具有重要意义。老年人骨膜变薄,成骨细胞和破骨细胞的分化能力减弱,因而骨的修复机能减退。 2、骨质;骨质由于结构不同可分为两种:一种由多层紧密排列的骨板构成,叫做骨密质;另一种由薄骨板即骨小梁互相交织构成立体的网,呈海绵状,叫做骨松质。 (一)、骨密质质地致密,抗压抗纽曲性很强。 (二)骨松质则按力的一定方向排列,虽质地疏松但却体现出既轻便又坚固的性能,符合以最少的原料发挥最大功效的构筑原则。
机器视觉的辅助驾驶系统的视频中行人检测跟踪
机器视觉的辅助驾驶系统的视频中行人 实时检测识别研究文献综述 1机器视觉发展 国外机器视觉发展的起点难以准确考证,其大致的发展历程是:20世纪50年代提出机器视觉概念,20世纪70年代真正开始发展,20世纪80年代进入发展正轨,20世纪90年代发展趋于成熟,20世纪90年代后高速发展。在机器视觉发展的历程中,有3个明显的标志点,一是机器视觉最先的应用来自“机器人”的研制,也就是说,机器视觉首先是在机器人的研究中发展起来的;二是20世纪70年代CCD图像传感器的出现,CCD摄像机替代硅靶摄像是机器视觉发展历程中的一个重要转折点;三是20世纪80年代CPU、DSP等图像处理硬件技术的飞速进步,为机器视觉飞速发展提供了基础条件。 国内机器视觉发展的大致历程:真正开始起步是20世纪80年代,20世纪90年代进入发展期,加速发展则是近几年的事情。中国正在成为世界机器视觉发展最活跃的地区之一,其中最主要的原因是中国已经成为全球的加工中心,许许多多先进生产线己经或正在迁移至中国,伴随这些先进生产线的迁移,许多具有国际先进水平的机器视觉系统也进入中国。对这些机器视觉系统的维护和提升而产生的市场需求也将国际机器视觉企业吸引而至,国内的机器视觉企业在与国际机器视觉企业的学习与竞争中不断成长。 未来机器视觉的发展将呈现下列趋势: (1)技术方面的趋势是数字化、实时化、智能化 图像采集与传输的数字化是机器视觉在技术方面发展的必然趋势。更多的数字摄像机,更宽的图像数据传输带宽,更高的图像处理速度,以及更先进的图像处理算法将会推出,将会得到更广泛的应用。这样的技术发展趋势将使机器视觉系统向着实时性更好和智能程度更高的方向不断发展。 (2)产品方面:智能摄像机将会占据市场主要地位 智能摄像机具有体积小、价格低、使用安装方便、用户二次开发周期短的优点,非常适合生产线安装使用,越来越受到用户的青睐,智能摄像机所采用的许多部件与技术都来自IT行业,其价格会不断降低,逐渐会为最终用户所接受。因此,
运动生物力学
运动生物力学 运动生物力学:是生物力学的一个重要分支,是研究体育运动中人体机械规律的科学。 运动生物力学的主要任务:提高运动能力,预防运动损伤 运动生物力学的研究方法分为测量方法和分析方法,其中测量方法可以分为运动学测量、动力学测量、人体测量、肌电图测量 运动学测量的参数:(角)位移、(角)速度、(角)加速度 动力学测量的参数:主要界定在力的测量方面。 人体测量是用来测量人体环节的长度、围度及,(质量、转动惯量等) 肌电图测量是用来测量肌肉收缩时的神经支配特性。 动作结构:运动时所组成的各动作间相互联系、相互作用的方法或顺序 动作结构的特征主要表现在运动学和动力学,运动学特征指完成动作时的时间、空间和时空方面表现出来的形式或外貌上的特征;动力学的特征指决定动作形式的各种力(力矩)相互作用的形式和特点,包括力、惯性和能量特征。 运动学特征:时间特征、空间特征和时空特征 时间特征反映的是人体运动动作和时间的关系:半蹲起立和深蹲起立 空间特征是指人体完成运动动作时人体各环节随时间变化所产生的空间位置 改变状况:下肢和躯干等空间移动轨迹 时空特征指人体完成运动动作时人体位置变化的快慢情况。 动力学特征包括,力的特征、能量特征和惯性特征 能量特征:人体运动时完成的功、能和功率方面的表现形式。 惯性特征:人体运动中人的整体、环节以及运动器械的质量、转动惯量对运动 动作所具有的影响。 动作系统:大量单一动作按一定规律组成为成套的动作技术,这些成套的动作技术叫做动作系统。 人体基本运动动作形式可主要归纳为推与拉动作、鞭打动作、缓冲和蹬伸动作及扭转、摆动和相向运动等动作形式 上肢基本运动动作形式——推(铅球)、拉(单双杠)、鞭打(标枪)★人体基本运动下肢基本运动动作形式——缓冲、蹬伸、鞭打 动作形式全身基本运动动作形式——摆动、躯干扭转、相向运动 人体的运动是由运动器系的机能特征所决定的,即以关节为支点,以骨为杠杆,在肌肉力的牵拉下绕支点转动,各肢体环节运动的不同组合使人完成千变万化的动作。 生物运动链根据其结构特点可以分为开放链和闭合链。见书P28-图2-15 生物运动链中的杠杆同机械杠杆一样也分为平衡杠杆、省力杠杆和速度杠杆 人体中的三类骨杠杆:见书P30-图2-16 ★人体惯性参数是指人体整体及环节质量、质心位置、转动惯量和转动半径 人体简化模型:质点模型、刚体和多刚体模型
基于骨骼数据的人体行为识别分析
基于骨骼数据的人体行为识别 摘要 人体动作姿态识别是计算机视觉研究领域中最具挑战的研究方向,是当前的研究热点。对人体动作姿态进行自动识别将带来一种全新的交互方式,通过身体语言即人体的姿态和动作来传达用户的意思,如在机场、工厂等喧闹的环境下,采用手势、动作姿态识别等人机交互技术能够提供比语音识别更加准确的信息输入。总之,在智能监控、虚拟现实、感知用户接口以及基于内容的视频检索等领域,人体动作姿态的识别均具有广泛的应用前景。该文首先简单介绍了人体动作姿态序列的分割,然后对人体动作姿态识别的方法进行了分类介绍,并对一些典型的算法的研究进展情况及其优缺点进行了重点介绍。 关键词:人体动作姿态识别; 人工智能; 隐马尔可夫模型; 动态贝叶斯网络; 模板匹配前言 人体姿态识别是计算机视觉的一个重要研究方向,它最终目的是输出人的整体或者局部肢体的结构参数,如人体轮廓、头部的位置与朝向、人体关节点的位置或者部位类别。姿态识别的研究方法应该说,几乎涵盖了计算机视觉领域所有理论与技术,像模式识别、机器学习、人工智能、图像图形、统计学等。到目前为止,已经有众多识别方法被提出,并且也取得了许多重要的阶段性的研究成果,但是以往的方法都是基于普通光学图像,比如常见的RGB 图像,这类图像容易受光照、阴影等外界变化的影响,尤其在环境黑暗的情况下无法来识别人体姿态,并且由于人体关节自由度大,及人的体型、着装较大差异性,常导致姿态识别系统识别率低。尽管有研究者利用多个摄像机获取采集的图像来获取人体深度信息以克服以上问题[1],但是该类方法恢复的深度信息不是唯一的,而且计算量非常大,尤其是这种方法要求事先用人工对传感设备进行标定,而在选取场景中的标定物时,往往又会遇到实际环境操作困难的问题。 随着光电技术的快速发展,深度传感设备的成本逐渐降低,人们获取深图像的途径及方法也越来越多。该方向的研究也逐渐成为计算机视觉领域的研究趋势。具体原因包括:一方面,深度传感设备不仅操作简单,并且极大简化了普通摄像机的标定过程;另一方面,得到的深度图像由于直接包含了人体的深度信息,能够有效的克服普通光学图像遇到的上述问题。到目前为止,较有影响力的基于该类图像的人体姿态识别算法,应该是 Shotton 等人利用一种深度传感器 Kinect 来实时捕捉人体运动的算法,该算法虽然能够满足人们对识别系统实时性的要求,但其对硬件要求特别高,并且不适合低分辨率图像中的人体关节点提取,容易导致人体骨架扭曲。下文将具体陈述人体运动分析的主要用途和前人在不同时期对这些难题的处理办法。 主题 基于计算机视觉的人体运动分析不仅在智能监控、人机交互、虚拟现实和基于内容的视频检索等方面有着广泛的应用前景,更是成为了未来研究的前瞻性方向之一。Gavrila 总结了它的一些主要应用领域[2,3,4],下面据此对其典型应用做出进一步的介绍。 智能监控(Smart Surveillance) 所谓“智能监控”是指监控系统能够监视一定场景中人的活动,并对其行为行分析和识别,跟踪其中的可疑行为(例如在一些重要地点经常徘徊或者人流密集的场合下突发的人群拥挤等状况)从而采取相应的报警措施。智能监控系统应用最多的场合来自于那些对安全
人体解剖学练习题运动系统
1、下列对骨的叙述正确的是( ) A.每块骨都由骨质、骨髓、骨髓腔、骨膜和关节软骨构成 B.骨骺由骨密质构成 C.成人骨髓腔内充满红骨髓 D.红骨髓具有造血功能 E.每块骨均不能视为一个器官 2、不成对的脑颅骨有( ) A.顶骨 B.颞骨 C.蝶骨 D.上颌骨 E.泪骨 3、解剖学姿势的描述,下列何者是错误的( ) A、身体必须直立 B、两眼平视前方 C、上肢在躯干两旁自然下垂 D、手掌面对躯干 E、两足跟靠拢,两趾接触并指向前方 4、骶管麻醉须摸认的骨性标志( ) A.骶正中嵴 B.骶岬
C.骶角 D.骶后xx E.都不对 5、开口于蝶筛隐窝的鼻旁窦是( ) A.上颌窦 B.额xx C.蝶窦 D.筛xx小房 E.筛xx后小房 6、开口中鼻道的鼻旁窦是( ) A.上颌窦 B.额xx C.筛xx D.筛xx E.以上都是 7、在直立姿势下,不能由于重力作用而引流的鼻旁窦是( ) A.额xx B.蝶窦 C.上颌窦 D.筛xx E.以上都不对
8、下列xx属于长骨( ) A.第八肋骨 B.舟骨 C.趾骨 D.跟骨 E.椎骨 9、下面哪一项不属于人体九大系统( ) A.消化系统 B.脉管系统 C.免疫系统 D.内分泌系统E 10、有关骨髓腔正确的是( ) A.位于骨骺内 B.位于长骨的骨干内 C.位于骨松质的间隙内 D.成人骨髓腔内含红骨髓 E.小儿骨髓腔内含黄骨髓 11、有关各部椎骨主要特征的叙述正确的是( ) A.胸椎体的横断面呈肾形 B.颈椎体的横断面呈心形 C.腰椎棘突呈板状,水平伸向后方
D.腰椎体的横断面呈椭圆形 E.胸椎横突有孔啊 12、胸骨角( ) A.位于胸骨体和剑突的交界处 B.是两侧肋弓形成的夹角 C.两侧平对第2肋 D.两侧平对第2肋间隙 E.两侧平对第3肋 13、骶管麻醉时须摸清的骨性标志是( ) A.骶前孔 B.骶后孔 C.骶岬 D.骶角 E.骶管 14、不属于肩胛骨的结构是( ) A.肩峰 B.肩胛冈 C.肩胛下窝 D.喙突 E.滑车切迹 15、桡神经沟位于( )
运动人体图像识别
学习报告 一.意义和背景 随着信息技术的快速发展壮大和应用的普及,利用计算机视觉的技术在图像处理方面和模式识别领域中研究,并对视频图像进行人体运动特征提取与有效识别已成为人们关注的热点问题。计算机视觉技术对人体运动的视频或者图像进行识别是基于对其视频或者图像的序列进行分析处理;对检测出的人体运动目标进行运动特征提取和分类识别,从而达到理解和描述其行为的目的。基于视频图像的人体运动特征分析在智能视频监控、智能接口、虚拟现实等领域有着相当广阔的应用前景。 人体运动特征的提取与识别需要结合生物识别技术来识别和判断运动中人的行为、区别个体身份。所谓生物识别技术,其具体操作就是利用人体与生俱来的生物特征进行个体身份认证,最显著的特点是具有不变性和唯一性。 人体运动特征包括:肢体摆动特征,步态特征,人体轮廓投影特征,人体对称特征等,其中从视觉监控的角度来看,步态特征是远距离场景条件下最具有代表性最典型的人体运动特征,近年来备受关注,同时也涌现出大量富有意义的步态识别算法。 二.人体运动特征识别研究 运动特征识别在当今的科研领域中涉及面广泛,主要涉及到图像处理,多传感器技术,虚拟现实,模式识别,计算机视觉和图形学,
计算机辅助设计,可视化技术,智能机器人等一系列研究领域。针对人体运动图像序列进行分析处理的运动人体视觉分析技术,一般情况下可分为以下几个过程,运动目标检测,运动目标特征提取以及识别复杂背景下的运动目标身份。 图1 典型的运动特征识别系统 运动特征识别的主要研究方法 目前运动特征识别中的运动特征包含了两种分量:结构化分量和动态分量。其中结构化分量也就是静态分量,它负责记录运动人体的身高,步幅等身体形状信息;而动态分量则形象地表征出了在运动过程中人体的胳膊摆动,肢体倾斜度,迈腿方式等运动特征,依据上述两种类型分量,现有的运动特征识别算法大致分为两类:基于统计的方法和基于模型的方法。
人体8大系统
人体的八大系统 人体共有8个系统,即:运动系统、消化系统、呼吸系统、循环系统、泌尿系统、神经系统、内分泌系统和生殖系统。 运动系统:具有运动、支持、保护功能,由骨、骨连接和骨骼肌组成。骨以不同形式连结在一起,构成骨骼。形成了人体的基本形态,并为肌肉提供附着,在神经支配下,肌肉收缩,牵拉其所附着的骨,以可动的骨连结为枢纽,产生杠杆运动。 骨是以骨组织为主体构成的器官,成人骨共有206块,依其存在部位可分为颅骨、躯干骨和四肢骨。骨以骨质为基础,表面复以骨膜,内部充以骨髓,分布于骨的血管、神经,先进入骨膜,后穿入骨质再进入骨髓。两骨和更多骨连接在一起,具有一定的活动功能,叫做关节。每块肌肉都由肌腱和肌腹组成,肌腹有收缩能力,肌腱附着于骨,无收缩能力。 消化系统:功能主要是食物的消化和吸收。由消化管和消化腺组成,消化管包括口腔、食管、咽、胃、小肠、大肠、肛门等。消化腺是分泌消化液的器官,包括唾液腺、胃腺、胰腺、肝、肠腺等。 食物在消化管内的分解过程叫做消化,食物经过消化后,透过消化管粘膜,进入血液循环的过程叫做吸收。对于未被吸收的残渣部分,消化道则通过大肠以粪便形式排出体外。 消化系统对食物的消化有两种方式。一种是通过消化腺分泌消化液来完成,这种方式叫做化学消化。另一种方式是通过消化管肌肉的收缩产生咀嚼、蠕动,将食物磨碎,使食物与消化液充分混合,并将食物不断地向消化管的下方推送,这种消化方式称为机械性消化。 机械性消化和化学性消化两功能同时进行,共同完成消化过程。 呼吸系统:主要功能是与外界的进行气体交换,呼出二氧化碳,吸进氧气。由呼吸道和肺组成。呼吸道包括鼻、咽、喉、气管、支气管等器官,临床上把鼻、咽、喉称上呼吸道;把气管、主支气管及其分支称下呼吸道。其中鼻、咽喉、气管和支气管是空气进出的通道,肺是进行气体交换的场所。 肺的呼吸是通过呼吸运动来实现的,即依靠呼吸肌收缩和舒张,引起胸腔有节律地扩张和回缩,使空气经呼吸道进出肺。 循环系统:主要功能是气体、养分及废物的交换、运送。包括心血管系统和淋巴系统。 心血管系统是由心脏、动脉、毛细血管及静脉组成的一个封闭的运输系统。由心脏不停的跳动、提供动力推动血液在其中循环流动,为机体的各种细胞提供了赖以生存的物质,包括营养物质和氧气,也带走了细胞代谢的产物二氧化碳。 淋巴系统是一个遍布全身的网状的液体系统,由扁桃体、脾脏、淋巴管和淋巴结组成,是人体的重要防卫体系。它能制造白细胞和抗体,滤出病原体,并加以消灭,阻止感染蔓延。
Human CAD人体运动仿真软件
Human CAD人体运动仿真软件 Human CAD人体运动仿真软件简介 HumanCAD人体运动仿真软件是加拿大NexGen公司产品,迄今已有20年的专业研发技能和经验,其基础构架是NexGen公司开发人员从1990年就开始研发的ManneQuin仿真软件。 HumanCAD人体运动仿真软件主要用于人体体力作业的动态、静态模拟和分析。它拥有多个作业工具和环境组件模块。场景逼真、实用,可以对运动和作业过程中的躯干、四肢、手腕等部位的空间位置、姿势、舒适度、作业负荷、作业效率等数据进行采集和分析,在世界范围的研究领域被广泛使用。 Human CAD人体运动仿真软件主要模块 HumanCAD V1.2主程序:实现主要的编程功能,包括导入/输出人体和实物模型、构造编程环境等。 HumanCAD ErgoTools:扩展人体模型相关的数据库,使分析功能更强大。HumanCAD CADExchange:用于扩展软件可识别的三维模块类型,使软件兼容性更强。 使用指导书及相关资料针对教育/科研用户,指导其高效展开科研。 产品许可号:正版授权许可。 Human CAD人体运动仿真软件输出功能 可及度分析 视野分析 抬举力量分析 作业姿势评估 舒适度分析 基于用户设定的其他人体作业数据 HumanCAD人体运动仿真软件功能特点 可根据用户需求,自动生成三维人体模型。 可设置人体模型的尺寸、姿势、动作。 设计、生成产品模型,并设定其各种物理参数。 与各类相关三维建模软件都有良好接口,可实现用户自定义模型的导入与输出。具备强大的数据分析功能,可以分析人在作业过程中的姿势、舒适度、做功等数据。
人体解剖学运动系统习题(知识点)
人体解剖学运动系统习题 第三章运动系统 【练习题】 一、名词解释 1.骺 2.骨髓 3.椎间孔4。椎管5.胸骨角 6.肋弓7.关节腔 8.椎间盘 9。黄韧带10.腹直肌鞘 11.腹股沟管 12。斜角肌间隙13。乳突 二、填空题 1.运动系统包括( ),()和( )三部分. 2. 成人全身骨共有( )块。按其所在部位分为( ),()和( )。 3。根据骨的外形,可将骨分为(),( ),()和( )四类。 4.骨的构造主要由( ),( ),( ),血管和神经组成。 5.关节的基本结构包括(),()的()三部分。 6.骨髓位于( )的( )间隙内。可分为有( )功能的( ) 和失去()功能的()两种. 7. 躯干骨包括24块(),1块( ),1块(),1块( ),和12对( ). 8.脊柱是借7块( ),12块( ),5块( ),1块( ),1块()和它们之间的骨连结共同构成。 9.胸廓是同12个( ),12对( ),1个()和它们之间的骨连结共同构成。 10.每块椎骨由位于前方的()和后方的
( )结合而成,它们共同围成( )。 11.从侧方观察,脊柱有四个生理弯曲,其中( )曲和()曲凸向前,而()曲和( )曲凸向后。 12.脊柱有很大的运动性,可做(),( ),(),( )和( )运动。 13.脊柱有(),( )和()功能。 14.胸骨自上而下分为( ),()和()三部分。 15.胸骨柄与体之间向前微凸的角称(),两侧接(),该角作为()的标志。 16。关节面覆盖有( ),它和关节囊的()共同围成关节腔。 17。连结相邻两个椎体间的纤维软骨叫(),其中央部分称(),周围部分称()。 18.不成对的脑颅骨包括(),( ),( )和( )四块。 19。成对的面颅骨有(),(),(),(),()和()六对。 20。上肢带骨是( )和().自由上肢骨包括( ),( ),(),( ),( )和( )。 21。下肢带骨即( )。自由下肢骨包括(),(),( ),(),(),( )和( )。 22.骨盆由2块(),1块()和它们之间的骨连结共同构成。 23.肩关节由()和肩胛骨的()构成。 24.肘关节是由()下端,()上端和( )上端构成的复关节,它包括三个关节,即
运动人体识别技术
二、运动人体识别技术 1.概念 运动人体识别技术是一种以图像处理,模式识别,计算机视觉等技术为基础,为运动人体进行识别处理的一项技术。其中图像处理(影像处理)是用计算机对图像进行分析,以达到所需结果的技术;模式识别是通过计算机用数学技术方法来研究模式的自动处理和判读,其中环境与客体统称为“模式”;计算机视觉技术是一门研究如何使机器看的学科,简单的说,就是用摄影机和电脑代替人眼对目标进行识别、跟踪和测量等机器视觉,并进一步作图像处理,使电脑处理成更适合人眼观察或传送仪器检测的图像。 2.运动人体识别的研究进展与现状 运动人体识别的研究主要包括图像处理、多传感技术、虚拟现实、模式识别、计算机视觉和图形学、计算机辅助技术、可视化技术以及智能机器人等。针对人体运动图像系列进行分析处理的运动人体视觉分析技术,一般情况下可分为:运动目标检测,运动目标特征提取以及识别复杂背景下的运动目标身份。其主要的研究方法为结构化分量和动态分量。其算法又分为基于统计的方法和基于模型的方法。现状是运动人体科学由宏观向微观理论研究深入发展,与运动人体科学相关的一些学科,快速成长为深入研究性学科,运动人体科学的竞技体育和体育保健。研究方向为:智能安全监控、人机接口、视频会议等方面,这些方面具有广泛的应用前景和巨大的潜在经济价值。 3.运动人体识别算法概述 (1)运动人体识别过程一般分为目标检测和处理、特征提取和分析、模式分类和识别。 (2)主要方法:目标检测和处理的特点为检测出原始图像中的运动目标,在一副图像中,局部目标的表象和形状能够被梯度或者边缘的方向密度分布很好的描述;特征提取和分析的特点为通过映射和变换的方法可以将高维空间中的特征描述用低维空间的特征来描述;模式分类和识别的特点是通过计算机用数学技术方法来研究模式的自动处理和判读,其中环境与客体统称为“模式” (3)特征提取模式识别的方法 在很多实际问题中,往往不容易找到那些最重要的特征,或者因为外界干扰不能提取出自己想要的特征信息。因此在测量时,我们总希望能够获取更多的信息来加以判断。除此之外,我们还能够用数据,比值,梯形图等等的一些展现方法来突出自己想要的特征信息。为了设计出效果好的分类器,通常需要对原始的测量值集合进行分析,经过选择和变换处理,组成有效的识别特征。 4.未来的发展趋势以及存在的问题 人体识别技术的发展趋势是:面对着全球化、信息化越来越提倡的社会背景下,识别技术会越来越广,深度也会不断加深。其虽然有着自己独特的优势,但并不是没有缺点,举个例子,在指纹识别上,面临指纹膜冒充指纹蒙混过关的问题;人面识别也许简单易个容就能过关;虹膜识别技术对黑眼睛存在识别难得问题;对于盲人和眼睛有疾病的患者实在是无能为力;声音、笔记也并不难以模仿;静脉识别也存在着易受温度干扰影响识别率的问题。