摩擦模型及其磁滞特性的研究

摩擦模型及其磁滞特性的研究1
张晓巧,王兴松
东南大学机械工程学院,江苏南京 (210096)
E-mail: linlangqiao820926@https://www.360docs.net/doc/f05083421.html,
摘 要:摩擦是存在于两接触面间的一种非常复杂的现象,直接影响运动控制系统的定位精度和速度。根据运动控制发展的需要,本文提出将机械伺服系统中出现的摩擦现象与磁滞现象综合考虑的理念。首先介绍了摩擦非线性环节典型的静力学模型和动力学模型,以及各种模型的特点及其对摩擦特征的描述能力,重点剖析了用偏微分方程描述的动力学模型,在速度反向时摩擦力的滞后现象,以及低速时的Stribeck 现象。最后在模型分析的基础上,通过仿真和实验研究,验证了摩擦具有磁滞特性。研究工作为摩擦、磁滞的综合建模和统一补偿控制,提供了理论基础。
关键词:摩擦,静力学模型,动力学模型,摩擦力滞后,磁滞特性
1. 引言
摩擦存在于所有具有相对运动或相对运动趋势的两接触面之间,是一种复杂的、非线性的、具有不确定性的自然现象。有时我们需要利用摩擦,如刹车、离合器等,但更多的时候我们要减小摩擦影响。在机械伺服运动系统中,由摩擦非线性引起的运动特性将直接影响加工定位的精度和速度。
随着先进装备运动精度要求的提高和数字控制的广泛应用,对摩擦补偿的研究也更具有其经济实用性。许多学者根据摩擦现象的动力学特性提出了相关的数学模型,并在此基础上运用控制算法实现摩擦的补偿,取得一定成效。
但在多数实际机械系统中,摩擦和其它非线性现象往往同时存在、同时作用(如间隙、饱和、磁滞等),比如用压电微驱动系统进行高精度误差补偿时,会引入磁滞问题。如果对它们进行分别建模、补偿,由于方法不统一,实际运用困难。基于摩擦本身就具有滞后效应(friction lag )的特性,作者提出对摩擦、磁滞进行统一建模补偿的理念,以提高精密伺服运动系统的精度。本文主要讨论摩擦模型的描述特点及其磁滞特性。
2. 摩擦数学模型分析
建立准确的摩擦非线性数学模型,对深入认识摩擦现象、进行精确补偿具有重要的意义。因此,有关摩擦建模的研究一直是该领域学者关注的热点。到目前为止,提出的摩擦模型共有30余种,它们为摩擦非线性的补偿研究奠定了
基础。
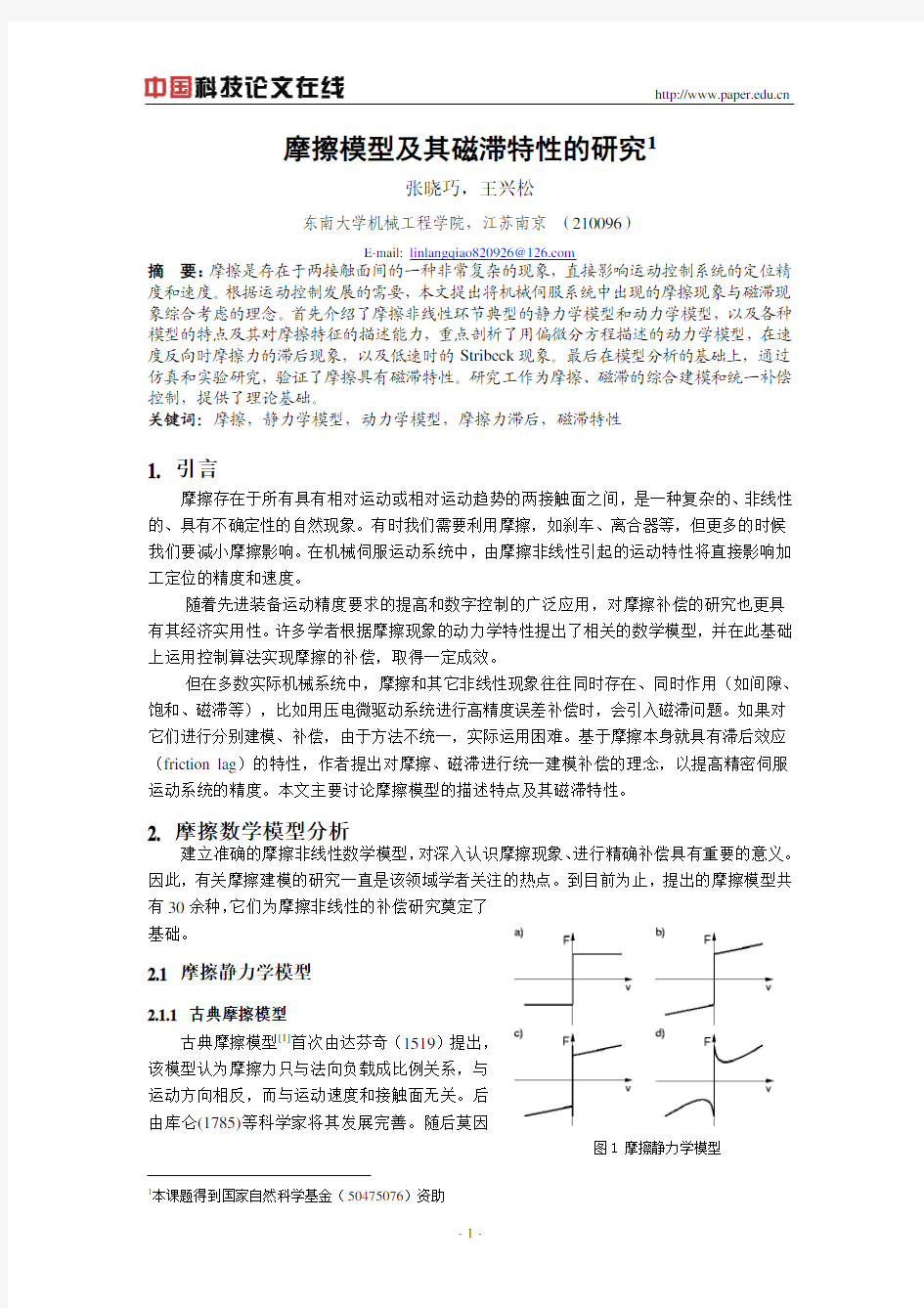
2.1 摩擦静力学模型
2.1.1 古典摩擦模型
古典摩擦模型[1]首次由达芬奇(1519)提出,
该模型认为摩擦力只与法向负载成比例关系,与
运动方向相反,而与运动速度和接触面无关。后
由库仑(1785)等科学家将其发展完善。随后莫因
1本课题得到国家自然科学基金(50475076)资助
(Morin,1833)引入静摩擦、雷诺(Reynolds,1866)引入粘性流体摩擦,继而形成了在工程中广泛应用的摩擦模型,即库仑摩擦+粘滞摩擦+静摩擦。如图1(c)所示。
库仑模型,又可称sgn 函数模型,即
sgn()c F F v = (1)
该模型完美诠释了达芬奇提出的摩擦假设,并以其简洁的表达式曾一度被广泛用于补偿技术中。但是在运动速度过零点处的摩擦力具有不确定性,可在[],c c F F ?区间取任意值。
19世纪流体动力学的发展引出力与润滑粘度相关的描述。粘性摩擦(viscous friction )模型的提出首次将速度变量引入到摩擦力表达式中,即
sgn()v v F F v v δ= (2)
粘性模型通常与库仑模型结合形成如图1(b)所示的摩擦特性。其中v δ是几何学参数,当1v δ=时,摩擦力与速度在单向区间成线性关系。
静摩擦(stiction )描述了物体在静止状态下的摩擦特性,通常比库仑力大。很显然在没有速度的状态下,静摩擦力不能由速度表达式来描述,而是外界力的函数,即
0&sgn()0&e e s s e e s
F if v F F F F F if v F F =
()00&sgn()e s
e F v i
f v e s F F if v F F F otherwise ?≠??=?=???F < (4) 其中()F v 是速度相关曲线函数,用来描述摩擦力与速度的关系特性。目前已提出多种参数化函数形式[2],比较常用的表达式为
/()()s s v v c s c v F v F F F e ?=+?+F v (5)
其中s v 为Stribeck 速度,如图2所示,即摩擦力负斜率段的初始
切线与库仑力的交点值,该值也直接影响低速段摩擦特性曲线
的陡度。选取指数衰减函数作为静摩擦力到粘滞摩擦的过渡,
能够很好地描述摩擦力的连续性。通过实验测得实际的摩擦力
曲线通常不对称,这主要因为反向时接触面的润滑性质不同。
古典摩擦模型虽然有模型简单,参数容易确定的优点,但它只描述了摩擦与速度的静态关系,不能解释摩擦的磁滞效应,也不能描述随实验条件变化临
界摩擦力变化的现象,以及静摩擦状态下接触面间小的预偏移
(Dahl 效应)现象。这也是这类模型在高精度、低速跟踪控制时,
不能达到理想效果的原因。
2.1.2 Karnopp 摩擦模型
上述模型在不同层次上描述了摩擦力随速度变化的特性,但
都存在一个基本问题,即速度零点的摩擦力描述不确定性。由于
摩擦力在速度零点的不连续性使得其很难检测。
这对于通过由位置
信号求导估算速度的系统,更为复杂。由于测量噪声的存在,离散位置值计算出的速度,可能根本没有零值。为解决这个问题,Karnopp 提出的模型对其进行了修补[3],巧妙地克服了零速度检测的困难,并消除了静止和滑移时不同状态方程之间的切换问题。如图3所示,该模型通过在较小的速度附近定义一个微小的“粘性”区域士Dv ,当v Dv <时认定(速度死区),摩擦力与作用在系统上的其它合力平衡,直到超过最大静摩擦力时,进入滑动阶段。
0v =karnopp 模型是介于静态模型和动态模型之间的一种简化模型,通过规定静止区间,降低了对速度信号质量的要求,更适合于工程实践。但它与系统其它受力有很大的关系,需要根据不同的系统结构,来剪裁合适的模型。
2.1.3 Armstrong 摩擦模型
Armstrong 模型[1]在修改了古典模型的基础上,考虑了随时间变化的静态阻力和Stribeck 效应,及预滑移运动。模型由三部分组成,通过机械开关或逻辑状态量进行切换,并在切换时初始化参数。
2,,,()1(,)((,)
)sgn()1(()/)(,)()f t c s d v l d s d s a s s a d
x k x v t F F t v F v v t vs t t F F F t γτγγ∞=?=+++?=+?+ (6) 表达式共包含7个参数,所以又称为七参数模型。为速度过零时的驻留时间。(6)式中的滑移摩擦力方程采用速度的延时形式d t (l v t )τ?来替代Stribeck 摩擦力相对应的瞬时速度,以静力学方程的形式体现其动力学特性。
Armstrong 模型虽然能够反映摩擦的动、静态特性,但其实质是将静态模型与动态特性生硬地组合,缺乏明确的物理意义,且存在冗余参数。Armstrong 还应用量纲和摄动分析方法建立了具有5个参数的模型。
2.2 摩擦动力学模型
以上介绍的典型摩擦静力学模型,已经基本描述了摩擦在静力作用下的表现特性。但是随着精密伺服系统和高端硬件技术的发展,基于静摩擦模型的控制精度已达极限,人们对复杂摩擦动力学模型的研究兴趣日趋浓厚。
2.2.1 Dahl 摩擦模型
Dahl 以滚珠轴承伺服控制实验为出发点[4],发现了类似于固体摩擦的摩擦特性,并由此提出了简单的摩擦数学模型。Dahl 模型是重要的动态模型,在其基础上发展的LuGre 模型和Bliman-Sorine 模型也代表了这一领域的最新成果。
Dahl 从应力-应变曲线出发,用偏微分方程将应力作用过程描述出来,即
(1sgn )c
dF F v dx F
ασ=
? (7)
其中x 代表变形量,F 即摩擦力,c F 为库仑摩擦力,σ
是刚度系数,α参数决定了曲线的形状。当1α=时,
可以得到如图4所示的曲线。曲线在库仑力范围内变
化,当速度反向时,由于sgn 符号函数的作用使得微增量
变大,出现滞后现象。
注意到该模型只与位移量和速度符号相关,而与速度大小无关,这是个重要的特征,为磁滞算子的应用奠定了基础[5]。
将方程变化后得到时间域Dahl 表达式为
(1sgn )c
dF dF dx F v v dt dx dt F ασ==? (8) 该数学模型即处于稳定受力状态下的库仑摩擦模型,与Duhem 磁滞模型[10]相比较,得到近似的方程结构,但是它没有将Stribeck 效应和静态摩擦考虑进去,这也正是后来对该模型进行修整的主要原因。
2.2.2 Bliman-Sorine 摩擦模型
Bliman 和Sorine 模型[6]建立在Dahl 模型的基础上,强调了摩擦力的速度无关性,摩擦力的幅值仅由速度符号及距离变量0()t
s v d ττ=∫决定,即 s s s s
dx Ax Bv ds F Cx =+= (9) 其中变量。不同阶数的模型具有不同的复杂程度,如给定一阶模型为
sgn()s v =v C 11/,/,1f f A B f εε=?==
1111
/()/(1sgn())f f dF dF ds dF F F v f v v f v dt ds dt ds f f εε===?=?v (10) 通过比较可以得到,一阶模型即为1α=时的Dahl 模型,其中11,/c F f f f σε==。也就是说一
阶模型同样不能描述静摩擦及Stribeck 现象。再看二阶模型,
11212
(/)()/()s f f dx 2x x dF dF ds v C f v v f v v dt ds dt ds f f ηεε===??+ (12) 当s →∞时呈指数衰减到对应的动态摩擦力。该模型可以看作由一快一慢两个平行的
Dahl 模型结合而成。快模型的稳态摩擦力大于慢模型,相减后得到摩擦力,同时引出静摩擦峰来表明动力学中的静摩擦现象。
1f f ?2通过模型分析,可以得到当0f ε→时,一阶模型表现为古典库仑摩擦模型,而二阶模型则是库仑与静摩擦组合模型。这里需要指出的是二阶模型所能描述的Stribeck 效应只是在运动开始后一定范围内存在,也就是说当运动速度降低时该效应就会消
失,这与实际应用中的摩擦现象有所偏颇。
2.2.3 LuGre 摩擦模型
对于动态摩擦模型而言,一个重要的评价标准是它是否能够精确地
预测摩擦力矩在零速附近的动态特性,因为在零速附近,摩擦力矩受非
线性因素的影响最大。LuGre 模型[7]在Haessia 及C.Canudas de Wit 提出的
模型基础上,将摩擦现象模拟为接触面上刚毛间的相互作用,如图5所
示。底层刚毛固定,上层刚毛具有弹性,当切向力作用在刚毛上时,
刚毛会象弹簧一样产生变形力。当变形足够大时刚毛才开始滑移。稳态运动下的平均变形量与速度相关,由偏微分方程表示为
00
()1()sgn()ss v dz v z dt g v z g v σσ=?=v (13) 式中代表刚毛的平均变形量。通过选取合适的函数,来定义稳态时的变形量随速度变化情况,即描述低速时表面间的润滑现象以及Stribeck 效应。虚拟微变量的提出,很好地诠释了零速度附近的摩擦特性。
z 2
(/)01()s v v g v e αα?=+z LuGre 模型可描述为
01
()()sgn()()ss dz F z f dt v F g v v f v σσ=++=+ (14) 其中0σ为刚毛的刚度,1σ为阻尼,表示粘性摩擦函数。在速度增加时,由于更多的润滑层被推入接触面中,刚毛的阻尼特性也随之发生变化,因此我们将阻尼定义为速度的衰减函数,使之更符合实际模型。且LuGre 模型在()f v 2
(/)11()s v v v e σσ?=14()/g v v σ<的条件下系统是耗散的,而耗散性是摩擦模型必备的特性[8]。
综上所述,为完整描述复杂的摩擦现象,人们探索总结出了多种模型,且各有不同的侧重点和相应的应用领域,作者试图总结如下: 表1 摩擦模型描述特性
摩擦模型 描述特性
古典摩擦模型 在Coulomb 模型基础上,提出摩擦力的速度相关性
及静摩擦的存在,从而得到不同状态下定值速度
对应的摩擦力,具有不连续性;
(Stribeck 模型) 将静摩擦与粘滞摩擦之间用过渡曲线平滑连接,
实现摩擦的连续性,仍停留在静力学模型阶段;
Karnopp 模型 针对零速附近检测存在的非连续性和不确定性,
构造微小“粘性”区间,降低低速检测要求;
Armstrong 模型 反映摩擦动态与静态特性,但表达式分离,需要
由外界切换变量介入;
Dahl 模型 采用偏微分方程描述摩擦动态过程,稳定状态即
Coulomb 模型,没有包含静摩擦和Stribeck 效应;
Bliman-Sorine 模型 由两族Dahl 模型曲线同时作用生成,变化速度差
构成静摩擦峰以描述Stribeck 效应,但只在一定速
度范围内存在,有区域限制;
LuGre 模型
基于刚毛模型的提出,引入虚拟微变量z ,构造
Stribeck 负斜率段,完整描述了摩擦的动态过程。3. 摩擦的磁滞特性分析
摩擦的滞后效应[9]是指从速度发生变化到摩擦力的变化之间存在时间上的滞后,滞后效应是摩擦力的一个非常重要的特性,它使得摩擦现象变得更加复杂。如图6显示的曲线为速度在某一点附近按正弦规律变化时摩擦力的变化情况,由于滞后效应,在速度递增时的摩
擦力要比速度递减时的摩擦力大。
由于摩擦静力学模型只在特定的点上分析摩擦力的性能,未能
阐明摩擦力连续变化时的特性,所以我们选取更贴近运动学的偏微
分方程来描述。上述各动力学摩擦模型中,偏微分方程均含有速度
符号函数项,所以在速度方向发生变化时,摩擦力曲线也相应变化,
从而构成一定宽度的滞回路线。这与智能材料中发现的磁滞回线特
性类同[10]。
下面以LuGre 模型为基础,对摩擦的磁滞特性进行研究。我
们将驱动转矩加载到一理想转动惯量模型上, u 22d x J F u dt += 其中,1J =F 为摩擦转矩,得到仿真曲线如下图所示。图7为摩擦力与微小变形z 间的曲线关系,力的变化是单向的,将作用力扩展到正负区间时,曲线关于原点对称扩展。图8是摩擦力与速度之间的关系,模型以速度为输入,输出表现为低速Stribeck 效应及滞后。两曲线均表现出明显的磁滞特性。
通过对直线电机直线运动实验台运动数据的采集,得到如图9所示的磁滞曲线,横坐标为微位移量,纵坐标为的摩擦力。其基本图形特性与仿真结果相同,验证了该摩擦模型的正确性。(图中,由于实验系统初始位置的选择不在驱动力零点,使得曲线有一定的偏移,关于原点不对称。)
4. 结束语
本文介绍了摩擦基于传统的静力学模型以及更具实际应用前景的动力学模型,并在摩擦模型的基础上分析了摩擦现象的描述特性及所具有的磁滞特性。仿真和实验证明,摩擦力与运动速度之间存在滞回现象,这为摩擦、磁滞的综合补偿,提供了理论基础,也是作者今后研究工作的重点。
参考文献:
[1] B. Armstrong, P. Dupont & C.C.de Wit, A Survey of Models, Analysis Tools and Compensation Methods for
the Control of Machines with Friction[J], Automatica, vol.30, no.7, 1994.
[2] B. Armstrong-Hélouvry. Control of Machines with Friction[J]. Kluwer Academic Publishers, Boston, Ma.,
1991.
[3] D. Karnopp. Computer simulation of slip-stick friction in mechanical dynamic systems[J]. Journal of Dynamic
Systems, Measurement, and Control,107H1I:100–103, 1985.
[4] P. Dahl. A solid friction model[R]. Technical Report TOR-0158H3107–18I-1, The Aerospace Corporation, El
Segundo, CA, 1968.
[5] M. A. Krasnoselskij and A. V Pokrovskij. Systems with hysteresis[J]. Springer,New York, 1980.
[6] P.-A. Bliman and M. Sorine. Friction modelling by hysteresis operators.application to Dahl, sticktion and
Stribeck effects[J]. In Proceedings of the Conference “Models of Hysteresis”, Trento, Italy, 1991.
[7] C.C.de Wit, H.Olsson & K.J.Astrom, A New Model for Control of System with Friction[J], IEEE Trans. On
Automatic Control, vol.40, no.3, 1995.
[8] Henrik Olsson. Control Systems with Friction[D]. PhD thesis, Lund Institute of Technology, University of
Lund, 1996.
[9] D. P. Hess and A. Soom. Friction at a lubricated line contact operating at oscillating sliding velocities[J].
Journal of Tribology, 112:147–152, 1990.
[10] J. W. Macki, P. Nistri & P. Zecca, Mathematical Models for Hysteresis[J], SIAM Review, vol.35, no.1,
pp94-123, 1993
Friction Models and Their Hysteresis Characteristics
Zhang Xiaoqiao, Wang Xingsong
(College of Mechanical Engineering, Southeast University, Nanjing 210096, China)
Abstract
Friction is a very complicated phenomenon arising at the contact of surfaces. And it directly degrades the positioning accuracy and rapidity of a motion control system. To enhance the precision of servo systems, friction should be adaptively compensated. With considering the hysteresis in piezo-based micro-feeding components, it is proposed to compensate friction and hysteresis simultaneously in this paper. Typical static models along with dynamic models for nonlinear friction were first introduced with emphasizing hysteresis properties of these models. And friction-lags observed when the velocity varied was stressed in differential dynamic models, as well as the Stribeck effect at low velocity. Hysteresis characteristics of friction were proved by both simulations and experiments. The results in this paper ensure the correctness to compensate friction and hysteresis simultaneously in practical servo systems.
Keywords:friction, static model, dynamic model, friction lag, hysteresis
表面工程摩擦学研究进展
第20卷 第2期摩擦学学报V o l20, N o2 2000年4月TR I BOLO GY A p r,2000表面工程摩擦学研究进展3 张绪寿,余来贵,陈建敏 (中国科学院兰州化学物理研究所固体润滑国家重点实验室,甘肃兰州 730000) 摘要:综述了第二代表面工程技术和表面工程摩擦学的研究进展,展望了21世纪表面工程摩擦学研究的发展动向. 关键词:表面工程摩擦学;表面涂层;复合表面工程;多层涂层 中图分类号:TH117文章标识码:A文章编号:100420595(2000)022******* 随着表面科学和材料科学与工程的发展,近廿年来表面工程摩擦学(改性表面摩擦学)获得了迅速发展.80年代初,表面工程摩擦学研究在英国和德国摩擦学各研究领域中已分别上升到了第一位和第二位. 1983年世界上第一个表面工程研究所在英国伯明翰大学成立.1985年《SU R FA CE EN G I N EER I N G》创刊,1988年《表面工程》创刊.资料表明[1],1990年到1994年仅德国就有近1000家新的表面工程公司成立.1994年北美、日本和西欧各国在表面工程研究领域的总投资达400亿美元.目前表面工程摩擦学已成为摩擦学研究领域中十分活跃的分支[2,3].这从1997年第一届世界摩擦学大会的有关论文情况亦可得到佐证[4].表面工程摩擦学领域所获得的大量研究成果不仅促进和丰富了摩擦学的基础研究,而且为开发工业和高新技术发展所必需的具有高强度、高耐磨性和高抗蚀性的摩擦学材料提供了重要的指南. 1 表面工程摩擦学研究现状 1.1 表面工程技术研究进展 1997年B ell根据表面工程技术(涂层和表面处理)发展历程把表面工程分为两代[5]:第一代主要采用单一技术,包括电镀、化学镀、热喷涂、热化学处理、CVD、PVD沉积以及载能束改性等表面工程技术.20多年来,该类表面工程及其摩擦学的研究取得了巨大进展,许多研究成果已获得了应用.随着新型工艺如PA PVD、PA CVD和PS II等的采用,具有低摩擦高抗磨性的新型涂层如C3N4等应运而生[6,7].但是,只有采用第二代表面工程即复合表面工程才有可能从经济和技术上不断满足高性能新材料的要求[5,8].Sub ram an ian等[9]根据涂层的发展历程把涂层技术分为3代:第一代涂层指传统的单组分涂层如T i N;第二代指二元复合涂层如T i(CN)和(T i A l)N;第三代指新近出现的多层及多组元涂层.近年来针对复合表面工程及多层涂层的研究更为活跃[10],其代表了表面工程技术90年代以来的发展方向.本文就复合表面工程和多层涂层摩擦学的研究进展进行综述. 1.2 复合表面工程的定义和分类 复合表面工程的特点在于采用2种或2种以上表面技术以获得任何单一技术不能达到的具有良好综合性能的复合物表面.按照两种不同技术间的相互作用及其对复合表面层综合性能的贡献,可以进一步将复合表面工程分为2类[5]:第一类指2种不同工艺技术互相补充,其最终性能是2种工艺共同作用的结果;第二类指一种工艺补充和增强另一种工艺,前者作为预处理或前处理,最终性能则主要取决于后一种工艺.采用复合表面工程的主要目的在于:①通过对底材进行强化预处理以提高底材对涂层的支撑能力,从而防止在给定负荷下由于底材的塑性变形而导致涂层的过早失效[5];②利用多种涂层或处理技术复合产生协同效应,从而在表面上获得更高性能的复合改性层[8].从技术上说,2种或多种表面技术的结合是没有限制的,但实际上复合表面工程不是每种表面技术的简单混合.由于复合处理的结果组成了一个典型的多层复合体系,复合体系的最终性能主要取决于2种不同处理技术的综合效应,其中2种处理间的协同效应对改善复合体系的性能有利.因此,选择复合表面处理技术时,必须仔细考虑不同处理工艺在冶金学、力学、物理和化学等方面的相互作用,严防 3国家杰出表年基金资助项目. 1999210212收到初稿,2000201228收到修改稿 通讯联系人张绪寿.张绪寿 男,65岁,研究员,主要从事摩擦学表面工程研究工作.
胜任特征模型 Competency Model
胜任特征模型Competency Model 在1973年,麦克里兰博士在《美国心理学家》杂志上发表一篇文章:“Testing forCompetency Rather Than Intelligence”。在文章中,他引用大量的研究发现,说明滥用智力测验来判断个人能力的不合理性。并进一步说明人们主观上认为能够决定工作成绩的一些人格、智力、价值观等方面因素,在现实中并没有表现出预期的效果。因此,他强调离开被实践证明无法成立的理论假设和主观判断,回归现实,从第一手材料入手,直接发掘那些能真正影响工作业绩的 个人条件和行为特征,为提高组织效率和促进个人事业成功作出实质性的贡献。他把这样发现的,直接影响工作业绩的个人条件和行为特征称为Competency(胜任素质)。这篇文章的发表,标志着胜任素质运动的开端。20世纪中后期,哈佛大学的戴维·麦克米兰(David·McClelland)教授的研究成果,使人们看到现代人力资源管理理论新的曙光,为企业人力资源管理的实践提供了一个全新的视角和一种更有利的 工具,即对人员进行全面系统的研究,从外显特征到内隐特征综合评价的胜任特征分析法。这种方法不仅能够满足现代人力资源管理的要求,构建起某种岗位的胜任特征模型(competency model),对于人员担任某种工作所应具备的胜任特征及其组合结构有明确的说明,也能成为从外显到内
隐特征进行人员素质测评的重要尺度和依据,从而为实现人力资源的合理配置,提供了科学的前提。岗位胜任特征是指根据岗位的工作要求,确保该岗位的人员能够顺利完成该岗位工作的个人特征结构,它可以是动机、特质、自我形象、态度或价值观、某领域知识、认知或行为技能,且能显著区分优秀与一般绩效的个体特征的综合表现。 胜任模型的作用胜任特征模型在人力资源管理活动中起着基础性的、决定性的作用。它分别为企业的工作分析、人员招聘、人员考核、人员培训以及人员激励提供了强有力的依据,它是现代人力资源管理的新基点。1.工作分析 传统的工作岗位分析较为注重工作的组成要素,而基于胜任特征的分析,则研究工作绩效优异的员工,突出与优异表现相关联的特征及行为,结合这些人的特征和行为定义这一工作岗位的职责内容,它具有更强的工作绩效预测性,能够更有效地为选拔、培训员工以及为员工的职业生涯规划、奖励、薪酬设计提供参考标准。2.人员选拔传统的人员选拔一般比较重视考察人员的知识、技能等外显特征,而没有针对难以测量的核心的动机和特质来挑选员工。但如果挑选的人员不具备该岗位所需要的深层次的胜任特征,要想改变该员工的深层特征却又不是简单的培训可以解决的问题,这对于企业来说是一个重大的失误与损失。相反,基于胜任特征的选拔正是帮助企业找到具有核心的动机和特质的
世纪回顾与展望——摩擦学研究的发展趋势
第硒卷第6期20O0年6居 机械工程学报 CHIN}cSEJ0L1f{NAL0FMEC}{ANICALENGINEERING Ⅵ,l,36M?6 Ju【l,2000 世纪回顾与展望——摩擦学研究的发展趋势 漫诗铸 (清华大学黪擦学国家重点实验室北京1000{;4) 摘要在强籁牵攘擘发展嚣变瓣基础土,憨络驽{罄纪国年代鞋寒,在鬻攘学主要磷究鹱蠛龟臻涟箨澜瓣、越辩密损与表面处理技术、纳米摩擦学等的发展现状和展盟。分析了相关学科的发展和学科交叉对摩擦学研究的推动作用,并彳卜绍了摩擦学与其他学科交叉领域如摩擦化学、生物摩擦学,生态摩擦学和微机械学等的发展概况和趋势。簸谲:藏搭漏精嚣鹋瘗援缝拳牵攘学瘴攘纯掌生态牵攘掌 中国分类鼍:THll7.】 0前言 章擦学作为一门实践性稂强的技术基础科举,它的形成和发展与社会生产要求和科学技术的进步密键挺关:戮燕耍摩攘学豹发爱爨变,宅经历了霓个不同的历史阶段和研究模式一 早期的摩擦学研究以18世纪m”ont。nsj}nc蕊。曲靖篱俸摩擦的疆究为代表,佳们通过太量的试验归纳出滑动摩擦的变化规律和经典公式。这…时期的特点鼹以试验为基础的经验譬}究攒式。 19世纪束.Revnolds¨3根据牯性流体力学揭示出滑动轴承中润滑膜的承载机壤.建立了表征流体海游貘力学褥性题Re¥m韬s方程,羹定r滚漆懑、簿的理论基础.从而开创r基于连续介质力学的研究模式:到了20世纪20年代以后,由于生产发展的需婺牵擦学豹研究领域得繇遘一步§。夭。其中,}b州、-2提出依靠润滑油的极性分子与金属表面的物理化学馋照露形戏吸瞻骥的边界澜涛理论;T0“ir峙ono从分子运动鲰度解释固体滑动过程的能量转换和摩擦起因,特别是Bowd。n和Tabor【4o建立了疆链羞效疲为基穗翁牵擦瘗撰理论等。这鳖骚究不仅扩展了摩擦学的范畴,而且促使它发展成为涉及力学、热处理、材料科学和物理化学等的边缘学科.瓿此开创了多学科综合研究的模式。 1965年奠国教育科学研究部发表《关于摩擦学教凳鞠殴究缀蠹》《通豢嚣麦赫}摄告),善敬提窭bhmo∞(摩擦学)一词简要地定必为“关于摩擦过程的科学”。此后,它作为一门独立的学科爱到世界备国普德重甏,鼙攘学瑾论与痘鬻繇究迸A了一个耨 习篙瞄。6驻曩秘臻弱8}赣。隧著研究翁深走开麓,久们试识到为了确效地发挥摩擦学在生产中的潜在效益._在研究模菰}的发展趋势蟪是出宏观进入激理,出怒性进入建量,由静态遥^动态.由单一学科的分析进人多掌利的综合研究“。 l研究现状与发展趋势 现代摩擦学研究的主要特征可以归纳为: (1)在以往分学科研究的麓础上,形成了一点簿握搬槭、奉砉糕秘毙学等甥关知识夔专建戮究麸螽,确利于对摩擦学现象进行多学科综合研究,推动了霹擦学机理研究的深入发展。 (2)鸯予攀攘学专韭教育酌发震程箱谖善及,彩及摩擦学本身具有的实践性很强的特点,当今工m界商大量的]二程科技人员结合工程实跨开展研究,促使摩擦学斑甬研究取得巨大的经济教撬。 (3)随着理论与应用的不断完善,摩擦学研究槎式开始麸戮努辑摩擦学褒象为主逐步自整分羲与羲制相结合.甚趸以控制性能为目标的研究模式发展此外,摩擦学研究工作从以往的主要面向设备维憾稻敬造逐步邂A褫禳产品静氆麟设计镁域。 20世纪60年代以后,相关科学技术特别是t{算搬科学、撼嚣}科学秘续岽秘技的发羼避摩擦学醪究藏着重要的推动作用,主要表现在以下几个方耐1.1流体润滑理论 敷鼗篷瓣为基穑翁弹往藏体动力溺漆t篱称鹑流润滑)理论的建立魁润滑理论的重大发展。现”计算机科学瓤数值分柝技术的迅猛发展,对于诲霪复杂的摩擦学现象都可能进行精确的定艇计算i静如,谯流体润滑研究中采用数值分析方法,已经建益f努蹙考惑肇攘表蘑撵性髟变、热教瘦、裘覆彩襞润滑膜流变陆能以及非稳态工况等实际因素影响, 万方数据
粗糙表面滑动摩擦接触模型研究的进展
第9卷第2期2011年6月中 国 工 程 机 械 学 报 CHINESE JOURNAL OF CONSTRUCTION MACHINERYVol.9No.2 Jun.2011基金项目:国家自然科学基金资助项目(50775039);福州大学科技发展基金资助项目(2010-XQ-13 );福州大学校科研启动资助项目(022367 )作者简介:赖联锋(1982-),男,博士生.E-mail:llf2531@yahoo.com.cn 粗糙表面滑动摩擦接触模型研究的进展 赖联锋,高诚辉,黄健萌 (福州大学机械工程及自动化学院,福建福州 350108 )摘要:对近年来国内外粗糙表面模型的进展进行了概述,根据粗糙表面模型类型的不同,分为粗糙表面和平面接触模型以及双粗糙表面接触模型,在各自模型中按照静载和滑动接触类型的研究进展进行表述,并提出了一些目前研究中遇到的热力耦合的问题以及将来双粗糙分形表面模型的发展.关键词:双粗糙表面;滑动接触;热力耦合 中图分类号:TH 117.1 文献标识码:A 文章编号:1672-5581(2011)02-0134-05Advances on sliding frictional contact models of rough surfacesLAI Lian-feng,GAO Cheng-hui,HUANG Jian-meng (College of Mechanical Engineering and Automation,Fuzhou University,Fuzhou 350108,China)Abstract:In this paper,the advances on rough surface models are summarized.According to diversetypes of rough surface models,they are categorized into rough-surface-plane and double rough-surfacecontact models.By representing these models with static loading and sliding contact respectively,thethermo-mechanical coupling and double rough-fractal-surface contact models are further elaborated.Key words:double rough surface;sliding contact;thermo-mechanical coupling 粗糙表面特征和接触力学并不是摩擦学特有的问题, 不过它们与摩擦、磨损现象的关系密切,是理解摩擦和磨损现象首先需要解决的问题,因而成为摩擦学研究中的1个专门领域[1] .摩擦与磨损的根本原因在于粗糙表面接触后受到力的作用, 导致材料产生发热、变形、疲劳、粘着和梨沟效应等,所以摩擦磨损与摩擦副接触表面的微观形貌与接触特性有很大关系,研究粗糙表面的摩擦热动力学应该从粗糙表面模型出发,客观准确地表征粗糙表面是接触建模的前提;摩擦副都处于不同粗糙度物体表面之间的接触状态下.材料的摩擦磨损过程是在表面微凸体间接触面积上进行的,所以材料的磨损又受到接触区的应力状态和温度以及元件相对移动速度的制约.要研究粗糙表面摩擦过程的热动力学问题,在表面表征的基础上必须建立表面接触模型, 分析静态接触和摩擦过程接触状态的接触力学问题.只有了解2个粗糙表面接触时,形状各异、尺寸不同的微凸体如何相互作用,才能对摩擦和磨损的实质过程进行更深入的研究. 因此本文根据粗糙表面模型和接触类型的不同,对近年来国内外粗糙表面静态和滑动模型的进展进行了概述,并提出了一些目前研究中遇到的热力耦合问题以及将来双粗糙表面模型的发展. 1 粗糙面与平面接触模型 1.1 静态接触模型 目前关于表面接触模型的研究大都基于Hertz的弹性接触理论.1966年,Greenwood和Williamson 提出了粗糙表面的弹性接触模型[2] (简称G-W模型),预测了真实接触面积与法向载荷间的关系.后来其
国内中学数学建模及其教学的研究现状
国内中学数学建模及其教学的研究现状 一、国内中学数学建模的研究现状 随着时代的进步和科技的发展,人们越来越觉得数学素质是一个人的基本素质的重要方面之一,而掌握和运用数学模型方法是衡量一个人数学素质高低的一个重要标志。受西方国家的影响,20世纪80年代初,数学建模课程引入到我国的一些高校,短短几十年来发展非常迅速,影响很大。1989年,我国高校有4个队首次参加美国大学生数学建模竞赛。现在这项竞赛已经成为一个世界性的竞赛。在美国大学生数学建模竞赛的影响下,1992年11月底,中国工业与应用数学学会举行了我国首届大学生数学建模联赛。从那以后,数学应用、数学建模方法、数学建模教学的热潮也迅速波及到中学,使得我国有关中学数学杂志中,讨论数学应用数学建模方法、数学建模教学的文章明显多了起来。1996年9月北京市数学会组织了一部分中学生参加了“全国大学生数学建模大赛”,取得了意想不到的好成绩,赢得了评审人员、教师等有关人士的一致好评。这些竞赛与常规的数学竞赛很不一样,题目内容与生产和生活实际紧密相连,可以使用参考书和计算工具,都是要通过建立数学模型来解决实际应用问题。这也说明中学生能否进行数学建模并不在于是否具备高等数学知识,运用初等数学知识仍然可以进行数学建模,甚至有时能把问题解决得更好。 在我国,中学真正开展数学建模的时间并不长。最早进行中学数学建模的城市是上海市。1991年10月,由上海市科技局、上海工业与应用数学学会、上海金桥出口加工联合有限公司联合举办了“上海市首届…金桥杯?中学生数学知识应用竞赛”的初赛,并于1992年3月举行了决赛。以后每年进行一次,主要对象是高中学生。这项竞赛参加者最多时达到了四千多人,在培养中学生数学应用意识和数学建模能力方面起到了重要作用,也为我国其他地区举办中学生数学应用与建模竞赛起了一个带头作用。 北京市于1993年到1994年也成功举办了“北京市首届…方正杯?中学生数学知识应用竞赛”,有两千多人参加了竞赛。与此同时,举办者开始尝试让中学生写数学建模的小论文,学生所写的小论文让举办者和教师大为吃惊。到1997年北京市教委从中学数学教育改革,特别是从应试教育向素质教育转变的角度出发,批准恢复了一年一度面向高中学生的竞赛。北京市成立了由北京市数学会、北京市教委科教院、人民教育出版社、北京师范大学、首都师范大学联合组织的“高中数学应用知识竞赛”咨询委员会和组织委员会,由北京数学会作为具体承办单位,并于1997年12月举办了“第一届北京市高中数学知识应用竞赛”初赛,并于1998年3月进行了决赛,至今成为惯例,已成功举办了十一届。 2000年8月,第七届全国数学建模教学与应用会议在郑州召开。会议安排了有关中学数学应用和建模的报告。比如,北京理工大学的叶其孝教授和北京师范大学的刘来福教授分别作了题为“深入开展中学生数学知识应用活动”和“北京中学生数学知识应用竞赛”的报告。特别值得提出的是,在这次会议上,第一次有中学教师参加。 2001年7月29日至8月2日,第十届国际数学建模教学与应用会议在北京举行。会议的研讨包括“中学数学知识应用竞赛和中学数学教育改革”的报告和研讨会。部分中国与会者还就“大、中学数学建模教学活动和教育改革”,“美、中大学生数学建模竞赛赛题解析”进行了交流。我国的一些中学教师在会上作了有关中学数学建模的报告,引起了与会者的强烈反响。所有这些都为进一步推动我国的数学建模教学活动创造了良好的条件。 教育部2003年颁布的《普通高中数学课程标准(实验稿)》把数学建模纳入了内容标准中,明确指出“高中阶段至少应为学生安排一次数学建模活动”,这标志着数学建模正式进入我国高中数学,也是我国中学数学应用与建模发展的一个里程碑。 二、国内中学数学建模教学的特点
摩擦学的现状与前沿
摩擦学的现状与前沿 ——机自09-8班姚安 03091131 摩擦学作为一门实践性很强的技术基础科学,它的形成和发展与社会生产要求和科学技术的进步密切相关。它作为一门独立的学科受到世界各国普遍重视,摩擦学理论与应用研究进入了一个新的时期。 1 研究现状与发展趋势 现代摩擦学研究的主要特征可以归纳为: (1)在以往分学科研究的基础上,形成了一支掌握机械、材料和化学等相关知识的专业研究队伍,有利于对摩擦学现象进行多学科综合研究,推动了摩擦学机理研究的深入发展。 (2)由于摩擦学专业教育的发展和知识普及,以及摩擦学本身具有的实践性很强的特点,当今工业界有大量的工程科技人员结合工程实际开展研究,促使摩擦学应用研究取得巨大的经济效益。 (3)随着理论与应用的不断完善,摩擦学研究模式开始从以分析摩擦学现象为主逐步向着分析与控制相结合,甚至以控制性能为目标的研究模式发展。此外,摩擦学研究工作从以往的主要面向设备维修和改造逐步进入机械产品的创新设计领域。 (4)交叉学科的发展。摩擦学作为一门技术基础学科往往与其他学科相互交叉渗透从而形成新的研究领域,这是摩擦学发展的显著特点。主要的交叉学科如下:摩擦化学、生物摩擦学、生态摩擦学及微机械学等。 当今,相关科学技术特别是计算机科学、材料科学和纳米科技的发展对摩擦学研究起着重要的推动作用,主要表现在以下方面。 1.1 流体润滑理论 以数值解为基础的弹性流体动力润滑(简称弹流润滑)理论的建立是润滑理论的重大发展。现代计算机科学和数值分析技术的迅猛发展,对于许多复杂的摩擦学现象都可能进行精确的定量计算目前薄膜润滑研究尚处于起步阶段,在理论和应用上都将成为今后润滑研究的新领域。 1.2 材料磨损与表面处理技术 现代材料磨损研究的领域已从以金属材料为主体扩展到非金属材料包括陶瓷、聚合物及复合材料的研究。表面处理技术或称表面改性是近20年来摩擦学研究中发展最为迅速的领域之一。它利用各种物理、化学或机械的方法使材料表面层获得特殊的成分、组织结构和性能,以适应综合性能的要求。就学科发展趋势而言,复合性材料的研究是材料科学的重点方向,而表面改性技术实质上就是研制表里具有不同材质的复合性材料,因而受到摩擦学者广泛的重视。 1.3 纳米摩擦学 纳米摩擦学提供了一种新的思维方式和研究模式,即从原子分子尺度上揭示摩擦磨损与润滑机理,从而建立材料微观结构与宏观特性之间的构性关系,这将更加符合摩擦学的研究规律.目前,纳米摩擦学的主要研究内容包括材料微观摩擦磨损机理与控制,以及表面和界面分子工程即通过材料表面微观改性和纳米涂层,或者建立有序分子膜润滑,以获得优异的减摩耐磨性能。当前的应用研究主要集中在计算机磁记录装置以及超精密和微型机械。纳米摩擦学是摩擦学研究的热点领域,迄今已有大量的研究报告发表,并出版了专著。
机械系统中摩擦模型的研究进展
龙源期刊网 https://www.360docs.net/doc/f05083421.html, 机械系统中摩擦模型的研究进展 作者:朱金秋 来源:《智富时代》2016年第04期 【摘要】社会经济的飞速发展,我国市场当中对机械系统的生产有了更高的要求,摩擦 力在任何的机械系统当中都有存在,因此要想保证机械系统可以持久稳定的使用,那么必须选取有效的办法来消除或降低其摩擦对机械系统中摩擦力的影响,本文对机械系统当中存在的摩擦现象以及其摩擦的模型进行了简单的介绍,希望对机械系统的生产发展有所帮助。 【关键词】机械系统;摩擦模型;研究 引言 在我们生活当中摩擦力无处可见,摩擦力其存在有利的一方面,比如说在机械设备当中摩擦压力以及摩擦传动机等,这些都对我们的生活带来了方便,但是其也存在消极的方面就像在机械系统当中因为其摩擦对精密的机械系统带来损伤,所以对机械系统当中摩擦模型的研究非常重要。 一、摩擦现象介绍 摩擦的实质是一种作用力,主要作用于两个摩擦表面的切线方向上。摩擦的研究由来已久,至今已经有400多年的历史了,随着实验仪器和研究方法的发展以及各种摩擦模型的深入研究,摩擦特性的神秘面纱被慢慢的解开,与摩擦相关的因素被逐渐挖掘出来。下面就六种主要的摩擦现象进行简单的介绍。 (一)库伦摩擦 库伦摩擦也被称之为运动摩擦,主要指的是运动状态下的摩擦。库伦摩擦是日常生活中最为常见的摩擦现象也是最早被人们发现和研究的摩擦现象。库伦摩擦力的大小取决于法向载荷的大小,并与法向载荷呈线性关系,随着法向载荷的增加而增加。库伦摩擦力的方向与物体的运动方向相反,无论是库伦摩擦力的大小还是方向都与物体的速度大小无关。 (二)粘性摩擦 当两个物体之间存在粘性流体的时候,那么两个物体之间就存在着粘性摩擦。粘性摩擦主要是由于两个物体之间两个物体之间的粘性行为造成的。粘性摩擦力的大小与物体的速度呈正线性关系,且当物体的运动速度为0时,物体间的粘性摩擦力大小也为0,且粘性摩擦力的速度与物体的速度是相同的。 (三)Stribeck摩擦
UTAUT模型在我国信息采纳中的研究现状
UTAUT模型在我国信息采纳中的研究现状 何钦1,2 1中南大学商学院,湖南长沙,410083 2广西工学院管理系,广西柳州,545006 摘要: 在信息采纳领域,UTAUT模型是集多种理论之大成者,目前国际上基于UTAUT 模型的研究逐年递增,我国的研究较少,而且研究对象比较局限。本文对现有研究进行了总结,指出了未来的研究方向。 关键字:技术创新,信息采纳,UTAUT模型 一、研究背景 信息技术创新的采纳与应用是信息系统领域主流的研究分支,相关研究主要集中在过程与行为影响因素研究两方面,主要关注信息技术被采纳的过程与促进或阻碍潜在采纳者采纳创新的影响因素。其中采纳行为理论是技术采纳领域中最为活跃的研究分支,信息技术采纳领域研究的核心问题是“如何预测或解释信息技术应用中用户表现出来的行为差异”,研究主要集中在根据社会学与心理学的相关理论分析技术采纳过程中的组织行为与个体行为,解释行为产生机理与相关影响因素。 二、UTAUT模型简介 2003年,Venkatesh&Davis等人通过系统的描述,发现技术任务适配模型、创新扩散理论、理性行为理论、计划行为理论、动机模型(Motivational model,MM)、复合的TAM 与TPB模型(Combined TAM and TPB,C—TAM—TPB)、PC利用模型(Model of PC utilization,MPCU)以及社会认知理论(Social cognitive theory,SCT)等理论在不同范畴中也具有相应的解释能力。基于此,Venkatesh &Davis将这些模型进行整合,在综合TAM、TAM2以及动机理论、创新扩散理论等的基础上提出了一个信息系统接受的整合模型,技术接受使用统一理论(Unified Theory of Acceptance and Use of Technology,UTAUT)。 UTAUT把八个模型中的论点整合为四个核心构念(Core Determinant):“绩效期望”(Performance Expectancy,PE)、“努力期望”(Effort Expectancy,EE)、“社群影响”(Social Influence,SI)和“促成因素”(Facilitating Conditions,FC ),以及四个调节变量:性别(Gender)、年龄(Age)、经验(Experience)和自愿性(Voluntariness of Use),相关的构念以及解释见表1。实证结果显示,UTAUT对使用行为的解释力高达41~70% ,比过去所知的任何一个模型都更加有效。
视网膜建模的研究现状及进展
视网膜建模的研究现状及进展探
摘要视网膜模型的建立是视网膜视觉假体中一个重要组成部分。视网膜模型是从已知的生理知识和实验数据出发模拟视网膜处理信息的功能,研究输入图像和输出神经冲动的关系。我们可以根据视网膜模型的原理将其分为硬件实现模型和算法模型。本文就对视网膜建模的国内外研究现状进行分析和讨论。 关键词人工视觉假体视神经视觉假体视网膜视觉假体人工神经网络神经生理模型 1 引言 视觉是人类获得信息的一个重要途径。然而世界上有很多人存在不同程度的视觉障碍,不能通过视觉获得信息。所以建立人工视觉假体来帮助盲人恢复视力有重要的意义。 视觉是一个非常复杂的神经生理活动过程。光信息医学论文网从1·3亿个光感受细胞输入,通过复杂的处理由100多万个神经节细胞产生相应神经冲动,经视神经、视交叉、视束传到外侧膝状体,再经视中枢的复杂处理,最终形成视觉。对于某些有视觉障碍的人(如老年黄斑变性、色素性视网膜炎)来说,他们的大部分视网膜细
胞的轴突穿过眼球组成了视神经。而光感受细胞还可被分为视杆细胞和视锥细胞。视网膜上视觉最敏锐的区域叫黄斑区,其中央有一直径1·5 mm 的中央凹。 在中心凹处主要集中的是视锥细胞,在中央凹以外视杆细胞逐渐增多。 视网膜的刺激传递是从光感受细胞到双极视网膜模型细胞最后传到神经节细胞产生放电。水平细胞和无长突细胞则构成视网膜传递的横向结构。光感受细胞的主要功能是接受光刺激。视锥细胞主要对强光敏感,而视杆细胞主要对弱光敏感。光感受细胞的电反应强度与细胞膜色素分子吸收的光子个数有关。 水平细胞位于光感受细胞下方,通过化学传递来接受光感受细胞的信号以及和其相邻层的电信号。水平细胞的作用相当于一个低通滤波器,为双极细胞提供一低频信号。双极细胞可以接受或抑制水平细胞和光感受细胞传来的信号,双极细胞根据其感受野的中心极性可以分为on和off两类。无长突细胞和水平细胞一样都是横向结构的细胞。无长突细胞接受双极细胞及其他无
07胜任特征模型案例(1)
销售人员胜任特征模型 (通用版) 工作分析小组:07级人力资源管理专业工作分析第一小组 小组成员:杨平、陈志华、何小兰、 魏欣、蒋金玲、刘璨 指导老师:夏建文教授 工作分析时间:2009年6月
目录 1.胜任特征概述 (3) 1.1 什么是胜任特征模型 (3) 1.2 胜任特征模型的构成要素 (3) 1.3 胜任特征模型的作用 (3) 2. 明确绩优标准 (4) 2.1 SMART原则 (4) 2.2 绩效标准 (4) 3. 收集数据信息(行为事件访谈法) (5) 3.1 确定访谈目的 (5) 3.2 选取访谈样本 (5) 3.3 制定访谈提纲 (5) 4. 分析数据信息 (8) 4.1 访谈记录 (8) 4.2 关键特征数据分析 (8) 5. 提炼胜任特征 (22) 6. 建立胜任特征模型 (23) 7. 论证胜任特征模型 (25) 8. 实习小结 (25) 9.附录 (28) 6.1 附录1:《第一小组胜任特征模型计划表》 (28) 6.2 附录2:《胜任特征模型课程设计须知》 (29)
1. 胜任特征概述 1.1 什么是胜任特征模型 胜任特征模型(Competency Assessment Methods)是一种新型的人力资源评价分析技术,它最初兴起于60年代末70年代初, 胜任特征是指企业成员的动机、特质、自我形象、态度或价值观、某领域知识、认知或行为技能,以及任何可以被测量或计算、并能显著区分出其优劣的特征。 胜任特征模型是指通过对员工进行系统全面的研究,对其外显特征及内隐特征进行综合评价,从而寻找符合某一职位的理想人选。 1.2胜任特征模型的构成要素 技能:较好完成公司所安排任务的能力。 知识:组织和运用与本职业工作相关的信息能力。 社会角色:意欲在他人面前展现的如以企业领导、主人等形象。 自我概念:对自己身份的认知或知觉。 动机:决定个人外在行为的内在思想。 特质:身体特征及典型的行为方式,如善于倾听别人、谨慎、做事持之以恒等等。 1.3 胜任特征模型的作用 胜任特征模型在人力资源管理活动中起着基础性的、决定性的作用。它分别为企业的工作分析、人员招聘、人员考核、人员培训以及人员激励提供了强有力的依据,它是现代人力资源管理的新基点。 1.工作分析2.人员选拔 3.绩效考核4.员工培训 5.员工激励
湍流模型
我们知道,描述流体运动(层流)的流体力学基本方程组是封闭的,而描述湍流运动的方程组由于采用了某种平均(时间平均或网格平均等)而不封闭,须对方程组中出现的新未知量采用模型而使其封闭,这就是CF D中的湍流模型。湍流模型的主要作用是将新未知量和平均速度梯度联系起来。目前,工程应用中湍流的数值模拟主要分三大类:直接数值模拟(D NS);基于雷诺平均N-S方程组(RANS)的模型和大涡模拟(LES)。DNS是直接数值求解N-S方程组,不需要任何湍流模型,是目前最精确的方法。其优点在于可以得出流场内任何物理量(如速度和压力)的时间和空间演变过程,旋涡的运动学和动力学问题等。由于直接求解N-S方程,其应用也受到诸多方面的限制。第一:计算域形状比较简单,边界条件比较单一;第二:计算量大。影响计算量的因素有三个:网格数量、流场的时间积分长度(与计算时间长度有关)和最小旋涡的时间积分长度(与时间步长有关),其中网格数量是重要因素。为了得到湍流问题足够精确的解,要求能够数值求解所有旋涡的运动,因此要求网格的尺度和最小旋涡的尺度相当,即使采用子域技术,其网格规模也是巨大的。为了求解各个尺度旋涡的运动,要求每个方向上网格节点的数量与Re3/4成比例,考虑一个三维问题,网格节点的数量与Re9/4成比例。目前,DNS能够求解Re(104)的范围。 基于RANS的湍流模型采用雷诺平均的概念,将物理量区分为平均量和脉动量,将脉动量对平均量的影响用模型表示出来。目前,基于RANS方程已经发展了许多模型,几乎能对所有雷诺数范围的工程问题求解,并得出一些有用的结果。其缺点在于:第一:不同的模型解决不同类型的问题,
摩擦学研究的发展趋势
世纪回顾与展望 —摩擦学研究的发展趋势 温诗铸院士 摘要在回顾摩擦学发展历史的基础上,总结20世纪60年代以来,在摩擦学主要研究领域包括流体润滑、材料磨损与表面处理技术、纳米摩擦学等的发展现状和展望。分析了相关学科的发展和学科交叉对摩擦学研究的推动作用,并介绍了摩擦学与其他学科交叉领域如摩擦化学、生物摩擦学、生态摩擦学和微机械学等的发展概况和趋势。 摩擦学作为一门实践性很强的技术基础科学,它的形成和发展与社会生产要求和科学技术的进步密切相关。18世纪的特点是以试验为基础的经验研究模式。19世纪末,开创了基于连续介质力学的研究模式。到了20世纪20年代以后,发展成为涉及力学、热处理、材料科学和物理化学等的边缘学科,从此开创了多学科综合研究的模式。1965年首次提出Tribology(摩擦学)一词,简要地定义为“关于摩擦过程的科学”。此后,它作为一门独立的学科受到世界各国普遍重视,摩擦学理论与应用研究进入了一个新的时期。 1 研究现状与发展趋势 现代摩擦学研究的主要特征可以归纳为: (1)在以往分学科研究的基础上,形成了一支掌握机械、材料和化学等相关知识的专业研究队伍,有利于对摩擦学现象进行多学科综合研究,推动了摩擦学机理研究的深入发展。 (2)由于摩擦学专业教育的发展和知识普及,以及摩擦学本身具有的实践性很强的特点,当今工业界有大量的工程科技人员结合工程实际开展研究,促使摩擦学应用研究取得巨大的经济效益。 (3)随着理论与应用的不断完善,摩擦学研究模式开始从以分析摩擦学现象为主逐步向着分析与控制相结合,甚至以控制性能为目标的研究模式发展。此外,摩擦学研究工作从以往的主要面向设备维修和改造逐步进入机械产品的创新设计领域。 20世纪60年代后,相关科学技术特别是计算机科学、材料科学和纳米科技的发展对摩擦学研究起着重要的推动作用,主要表现在以下方面。 1.1 流体润滑理论 以数值解为基础的弹性流体动力润滑(简称弹流润滑)理论的建立是润滑理论的重大发展。现代计算机科学和数值分析技术的迅猛发展,对于许多复杂的摩擦学现象都可能进行精确的定量计算。例如,在流体润滑研究中采用数值分析方法,已经建立了分别考虑摩擦表面弹性形变、热效应、表面形貌、润滑膜流变性能以及非稳态工况等实际因素影响,甚至于诸多因素综合影响的润滑理论,为机械零件的润滑设计提供了更加符合实际的理论基础。今后的任务是将润滑理论有效地应用于工程设计,其中对于某些机械零件诸如齿轮蜗轮传动的实际接触情况复杂,工作中润滑参数又不断变化,它们的润滑设计还需要进一步完善。
胜任力模型的定义学习资料
解释一 胜任力模型具体含义为:对组织或企业中的某一个职位,依据其职责要求所提出的,为完成本职责而需要的能力支持要素的集中表示!它能够具体指明从事本职位的人需要具备什么能力才能良好的完成该职位职责的需要!也是人们自我能力开发和学习的指示器。同时人力资源管理 胜任力模型 工作者或职位的直线经理可依据该模型对员工进行有针对性的在职辅导!以使员工或从事该职位的人员具备所需要的能力!该模型还可以作为人力资源管理工作者对员工及从事该职位的人进行职业生涯规划的基础,也可以作为制订培训规划的依据和信息源! 解释二 我们常说的胜任力模型通常指的是能力素质模型(有不同说法)。素质又叫胜任特征,是指能将某一工作中成就卓越与成就一般的人区别开来的深层特征。 解释三 在一个组织中,不同岗位的职务所要求员工具备的胜任力内容和水平是不同的;在不同组织和不同行业中,相同的或类似工作岗位上,员工的胜任力特征也不尽相同。因此,我们把担任某一个特定的任务角色所必须具备的胜任力总和称为“胜任力模型”(competency model)。 素质词典中,心理学家们把人的素质分为6大类,20个具体要素,每个要素又分为很多级别。这20个素质要素,对人类的知识、技能、社会角色、自我概念、性格、动机作了全面的概括,形成了企业任职者的完整的素质模型。 1.成就与行动族,具体包括4个素质要素:成就动机、主动性、对品质和次序和精确的重视、信息收集意识和能力。 2.帮助与服务族,具体包括2个要素:人际理解能力、客户服务导向。 3.冲击与影响族,具体包括3个要素:影响力、关系建立能力、组织认知能力 4.管理族,具体包括4个要素:培养他人意识与能力、团队合作精神、团队领导能力,命令/果断性 5.认知族,具体包括3个要素:分析式思考能力、概念式思考能力、技术、职业、管理专业知识 6.个人效能族,具体包括4个要素:自我控制、自信、弹性、组织承诺
fluent湍流模型
第十章湍流模型 本章主要介绍Fluent所使用的各种湍流模型及使用方法。 各小节的具体内容是: 10.1 简介 10.2 选择湍流模型 10.3 Spalart-Allmaras 模型 10.4 标准、RNG和k-e相关模型 10.5 标准和SST k-ω模型 10.6 雷诺兹压力模型 10.7 大型艾迪仿真模型 10.8 边界层湍流的近壁处理 10.9 湍流仿真模型的网格划分 10.10 湍流模型的问题提出 10.11 湍流模型问题的解决方法 10.12 湍流模型的后处理 10.1 简介 湍流出现在速度变动的地方。这种波动使得流体介质之间相互交换动量、能量和浓度变化,而且引起了数量的波动。由于这种波动是小尺度且是高频率的,所以在实际工程计算中直接模拟的话对计算机的要求会很高。实际上瞬时控制方程可能在时间上、空间上是均匀的,或者可以人为的改变尺度,这样修改后的方程耗费较少的计算机。但是,修改后的方程可能包含有我们所不知的变量,湍流模型需要用已知变量来确定这些变量。 FLUENT 提供了以下湍流模型: ·Spalart-Allmaras 模型 ·k-e 模型 -标准k-e 模型 -Renormalization-group (RNG) k-e模型 -带旋流修正k-e模型 ·k-ω模型 -标准k-ω模型 -压力修正k-ω模型 -雷诺兹压力模型 -大漩涡模拟模型 10.2 选择一个湍流模型 不幸的是没有一个湍流模型对于所有的问题是通用的。选择模型时主要依靠以下几点:流体是否可压、建立特殊的可行的问题、精度的要求、计算机的能力、时间的限制。为了选择最好的模型,你需要了解不同条件的适用范围和限制 这一章的目的是给出在FLUENT中湍流模型的总的情况。我们将讨论单个模型对cpu 和内存的要求。同时陈述一下一种模型对那些特定问题最适用,给出一般的指导方针以便对于你需要的给出湍流模型。 10.2.1 雷诺平均逼近vs LES 在复杂形体的高雷诺数湍流中要求得精确的N-S方程的有关时间的解在近期内不太可能实现。两种可选择的方法用于把N-S方程不直接用于小尺度的模拟:雷诺平均和过滤。
滑动摩擦力做功“Q=fs相对”模型 2
图1 摩擦生热的“Q=f ·s 相对”模型 模型建构:摩擦力属于“耗散力”,做功与路径有关,如果考虑摩擦力做功的过程中与产生热能关系时, 很多学生就会对之束手无策,从近几年的高考命题中,这类问题是重点也是难点问题,以下就针对摩擦力做功与产生热能的关系作一总结的分析. 【模型】一个物体在另一个物体上相对滑动, 摩擦产生的热量“Q=f ·s 相对” 【特点】①只有滑动摩擦力才能产生内能,静摩擦力不会产生内能;②摩擦产生的内能等于滑动摩擦力与相对路程的乘积;③一般要结合动量守恒定律解题;④两物体速度相同时,发热产生的内能最大。 【模型1】如图1所示,在光滑水平面上放一质量为M 的长木板,质量为m 的小物体从木板左侧以初 速度v 0滑上木板,物体与木板之间的滑动摩擦系数为μ,求 ⑴最终两者的速度 ⑵系统发热产生的内能 〖解析〗⑴物体滑上木板后受摩擦阻力作用做减速运动,而木板受摩擦动力作用做加速运动,当两者速度相同时,无相对运动,滑动摩擦力消失,以后系统以共同的速度匀速运动 根据动量定理:m v 0=(m+M )v 解得:0v m M m v += ⑵如图9所示,设物体对地的位移为s 1,木板对地的位移为s 2 根据动能定理: 对m :20212121mv mv mgs -= -μ 对M : 222 1 Mv mgs =μ 解得: )2 121(21)(222021Mv mv mv s s mg +-=-μ =m M M mv 212 0+? 可见:系统机械能的减少量全部转变成了内能。 发热损失的能量Q=μmgs 相对 模型典案: 【典案1】 如图11所示,质量为M=1kg 的平板车左端放一质量为m=2kg 的物体与车的摩擦系数μ=0.5。开始车与物体同以v 0=6m/s 的速度向右在光滑水平面上运动,并使车与墙发生正碰。设车与墙碰撞时间极短,且碰后车的速率与碰前相等,车身足够长。求:⑴物体相对车的位移 ⑵小车第一次与墙碰撞以后,小车运动的位移。 【典案2】如图所示,一质量为M 、长为L 的长方形木板B 放在光滑的水平地面上,在其右端放一质 量为m 的小木块A ,m <M 。现以地面为参照系,给A 和B 以大小相等、方向相反的初速度,使A 开始向左运动,B 开始向右运动,但最后A 刚好没有滑离B 板。 (1)若已知A 和B 的初速度大小为v 0,求它们最后的速度大小和方向 . (2)若初速度的大小未知,求小木块A 向左运动到达的最远处 (从地面上看)离出发点的距离.
过程特性与数学模型
第四章过程特性与数学模型 教学要求:了解过程特性的类型的四种类型 掌握描述过程特性的参数的物理意义及对控制通道、扰动通道的影响 学会一阶对象、二阶对象的建模 掌握机理分析法建模的一般步骤 了解实验测试法 重点:描述过程特性的参数的物理意义及对控制通道、扰动通道的影响 运用机理分析法建模 难点:时间常数的物理意义 过程特性的参数对控制通道、扰动通道的影响 过程控制系统的品质是由组成系统的各个环节的结构及其特性所决定。过程即为被控对象,它是否易于控制,对整个系统的运行情况有很大影响。 §4.1过程特性 被控过程的种类常见的有:换热器、锅炉、精馏塔、化学反应器、贮液槽罐、加热炉 等。这些被控过程的特性是由工艺生产过程和工艺设备决 定的。 被控过程特性-----指被控过程输入量发生变化时,过程输出量的变化规律。通道------被控过程的输入量与输出量之间的信号联系 控制通道-----操纵变量至被控变量的信号联系 扰动通道-----扰动变量至操纵变量的信号联系 一、过程特性的类型 多数工业过程的特性可分为下列四种类型: 1.自衡的非振荡过程 2. 无自衡的非振荡过程 3. 有自衡的振荡过程 4. 具有反向特性的过程 二、描述过程特性的参数 用放大系数K、时间常数T、滞后时间τ三个物理量来定量的表示过程特性。(主要针对自衡的非振荡过程) 1.放大系数K ⑴K的物理意义 K的物理意义:如果有一定的输入变化量ΔQ作用于过程,通过过程后被放大了K倍,变为输出变化量ΔW。
⑵放大系数K对系统的影响 对控制通道的影响 对扰动通道的影响 2. 时间常数T ⑴时间常数T的物理意义 时间常数是被控过程的一个重要的动态参数,用来表征被控变量的快慢程度。 时间常数T的物理意义还可以理解为:当过程受到阶跃输入作用后,被控变量保持初始速度变化,达到新的稳态值所需要的时间就是时间常数T。 ⑵时间常数T对系统的影响 对控制通道的影响 对扰动通道的影响 3. 滞后时间τ ⑴纯滞后τ0(P142) ⑵容量滞后τn ⑶滞后时间τ对系统的影响 对控制通道的影响 对扰动通道的影响 §4.2 过程数学模型的建立 过程的(动态)数学模型---是指表示过程的输出变量与输入变量间动态关系的数学描 述。 过程的输入是控制作用u(t)或扰动作用f(t), 输出是被控变量y(t). 数学模型:非参数模型,即用曲性或数据表格来表示,如阶跃响应曲线、脉冲响应曲线 和频率特性曲线;另一种是 参数模型,即用数学方程式来表示,如微分方程(差分方程)、传递函数、 状态空间表达式等。本节所涉及的模型均为用微分方程描述的 线性定常动态模型。 建立数学模型的基本方法 机理分析法-----通过对过程内部运动机理的分析,根据其物理或化学变化规律, 在忽略一些次要因素或做出一些近似处理后得到过程特性方 程,用微分方程或代数方程。这种方法完全依赖于足够的先验 知识,所得到的模型称为机理模型。机理分析法一般只能用于 简单过程的建模。机理分析法 实验测试法-----由过程的输入输出数据确定模型的结构和参数。 4.2.1机理分析法 微分方程建立的步骤归纳如下: ⑴根据实际工作情况和生产过程要求,确定过程的输入变量和输出变量。 ⑵依据过程的内在机理,利用适当的定理定律,建立原始方程式。 ⑶确定原始方程式中的中间变量,列写中间变量与其他因素之间的关系。 ⑷消除中间变量,即得到输入、输出变量的微分方程。 ⑸若微分方程是非线性的,需要进行线性化处理。