9300609飞秒超短脉冲激光器讲解
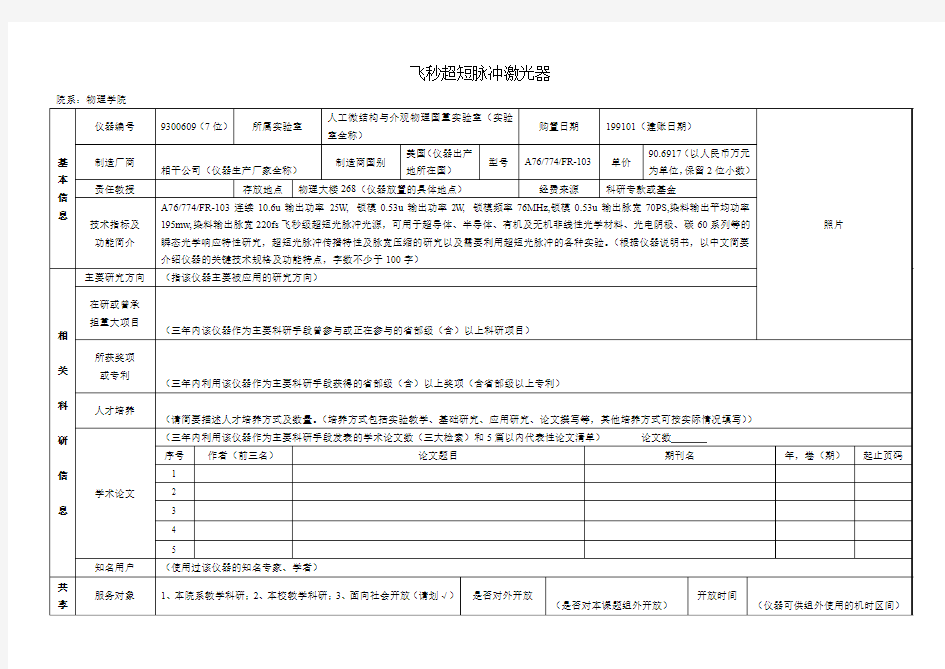

飞秒超短脉冲激光器院系:物理学院
激光脉冲测距实验报告讲解
激光脉冲测距
1 目录 一工作原理 (3) (1)测距仪工作原理 (3) (2)激光脉冲测距仪光学原理结构 (3) (3)测距仪的大致结构组成 (4) (4)主要的工作过程 (4) (5)激光脉冲发射、接收电路板组成及工作原理 (5) 二激光脉冲测距的应用领域 (5) 三关键问题及解决方法 (6) (1)优点 (6) (2)问题及解决方案 (7) 2 一工作原理 (1)测距仪工作原理 现在就脉测距仪冲激光测距简要叙述其工作原理。简单地讲,脉冲法测距的过程是这样的:测距仪发射出的激光经被测量物体的反射后又被测距仪接收,测距仪同时记录激光往返的时间t,光速c 和往返时间t 的乘积的一半,就是测距仪和被测量物体之间的距离。一般一个典型的激光测距系统应具备以下四个模块:激光发射模块;激光接收模块;距离计算与显示模块;激光准直与聚焦模块,如图2-1 所示。系统工作时,由发射单元发出一束激光,到达待测目标物后漫
反射回来,经接收单元接收、放大、整形后到距离计算单元计算完毕后显示目标物距离。在测距点向被测目标发射一束强窄激光脉冲,光脉冲传输到目标上以后,其中一小部分激光反射回测距点被测距系统光功能接收器所接受。假定光脉冲在发射点与目标间来回一次所经历的时间间隔为t,那么被测目标的距离 D 为:式中:c 为激光在大气中的传播速度;D 为待测距离;t 为激光在待测距离上的往返时间。 R=C*T/2 (公式1) 图一脉冲激光测距系统原理框图激光脉冲测距仪光学原理结构2() 3
图二)测距仪的大致结构组成(3 时钟脉冲门控电路、脉冲激光测距仪主要由脉冲激光发射系统、光电接收系统、 振荡器以及计数显示电路组成4)主要的工作过程(其工作过程大致如下:首先接通电源,复原电路给出复原信号,使整机复原,准备进行测量;同时触发脉冲激光发生器,产生激光脉冲。该激光脉冲有一小部分能量由参考信号取样器直接送到接收系统,作为计时的起始点。大部分光脉冲能量射向待测目标,由目标反射回测距仪的光脉冲能量被接收系统接收,这就是回波信号。参考信号和回波信号先后由光电探测器转换成为电脉冲,并加以放大和整形。整形后的参考信号能触发器翻转,控制计数器开始对晶格振荡器发出的时钟脉冲进行计数。整形后的回波信号使触发器的输出翻转无效,从而使计数器停实验装置实止工作。这样,根据计数器的输出即可计算出待测目标的距离。三单片机开放板和激光脉冲发射、接收电路验装置包括“”“”。 4 (5)激光脉冲发射、接收电路板组成及工作原理 激光脉冲发射/接收电路板原理框图如图2.3所示。图中EPM3032为CPLD;MAX3656为激光驱动器;MAX3747为限幅放大器;T22为单端信号到差分信号转换芯片;T23为差分信号到单端信号转换芯片;LD为半导体激光器;PD为光电探测器。板子上端的EPM3032被编程为脉冲发生器,输出重复频率为1KHz,脉冲宽度为48ns的电脉冲信号。此信号经MAX3656放大后驱动LD发光。板子下端的EPM3032被编程为计数器,对125MHz晶振进行计数。其计数的开门信号来自上端的TX信号,关门信号来自PD的输出。计数器的计数结果采用12 位二进制数据输出,对应的时间范围为0~32.7?s。 二激光脉冲测距的应用领域 激光测距仪一般采用两种方式来测量距离:脉冲法和相位法.脉冲法测距的过程是这样的:测距仪发射出的激光经被测量物体的反射后又被测距仪接收.测距仪同时记录激光往返的时间.光速和往返时间的乘积的一半.就是测距仪和被测量物体之间的距离.脉冲法测量距离的精度是一般是在+/-1米左右.另外.此类测距仪的测量盲区一般是15米左右。 激光测距仪已经被广泛应用于以下领域:电力.水利.通讯.环境.建筑.地质.警务.消防.爆破.航海.铁路.反恐/军事.农业.林业.房地产.休闲/户外运动等。 由于激光在亮度、方向性、单色性以及相干性等方面都有不俗的特点,它一出现就吸引了众多科学工作者的目光,并被迅速地被应用在工业生产方面、国防军工方面、房地产业、各级科研机构、工程、防盗安全等各个行业各个领域:激光焊接、激光切割、激光打孔(包括斜孔、异孔、膏药打孔、水松纸打孔、钢板打孔、包装印刷打孔等)、激光淬火、激光热处理、激光打标、玻璃内雕、激光微调、激光光刻、激光制膜、激光薄膜加工、激光封装、激光修复电路、激光布线技术、激光清洗等。有关于激光的研究与生产制造也如火如荼地开展了起来。 5
激光器激励原理
激光器激励原理 —固体激光器 1311310黄汉青 1311343张旭日辅导老师:
摘要:固体激光器目前是用最广泛的激光器之一,它有着一些非常突出的优点。介绍固体激光器的工作原理及应用,更能够加深对其的了解。本论文先从基本原理和结构介绍固体激光器,接着介绍一些典型的固体激光器,最后介绍其在军事国防、工业技术、医疗美容等三个方面的应用及未来的发展方向。 关键词:固体激光器基本原理基本结构应用 1引用 世界上第一台激光器—红宝石激光器(固体激光器)于1960年7月诞生了,距今已有整整五十年了。在这五十年时间里固体激光的发展与应用研究有了极大的飞跃,并且对人类社会产生了巨大的影响。 固体激光器从其诞生开始至今,一直是备受关注。其输出能量大,峰值功率高,结构紧凑牢固耐用,因此在各方面都得到了广泛的用途,其价值不言而喻。正是由于这些突出的特点,其在工业、国防、医疗、科研等方面得到了广泛的应用,给我们的现实生活带了许多便利。 未来的固体激光器将朝着以下几个方向发展: a)高功率及高能量 b)超短脉冲激光 c)高便携性 d)低成本高质量 现在,激光应用已经遍及光学、医学、原子能、天文、地理、海洋等领域,它标志着新技术革命的发展。诚然,如果将激光发展的历史与电子学及航空发展的历史相比,你不得不意识到现在还是激光发展的早期阶段,更令人激动的美好前景将要来到。 2激光与激光器
2.1激光 2.1.1激光(LASER) 激光的英文名——LASER,是英语词组Light Amplification by Stimulated Emission of Radiation(受激辐射的光放大)的缩写[1]。2.1.2产生激光的条件 产生激光有三个必要的条件[2]: 1)有提供放大作用的增益介质作为激光工作物质,其激活粒子(原子、分子或离子)有适合于产生受激辐射的能级结构; 2)有外界激励源,将下能级的粒子抽运到上能级,使激光上下能级之间产生粒子数反转; 3)有光学谐振腔,增长激活介质的工作长度,控制光束的传播方向,选择被放大的受激辐射光频率以提高单色性。 3固体激光器 3.1工作原理和基本结构 在固体激光器中,由泵浦系统辐射的光能,经过聚焦腔,使在固体工作物质中的激活粒子能够有效的吸收光能,让工作物质中形成粒子数反转,通过谐振腔,从而输出激光。 如图1所示,固体激光器的基本结构(有部分结构没有画出)。固体激光器主要由工作物质、泵浦系统、聚光系统、光学谐振腔及冷却与滤光系统等五个部分组成[4]。
光电探测技术实验报告
光电探测技术实验报告 班级:08050341X 学号:28 姓名:宫鑫
实验一光敏电阻特性实验 实验原理: 光敏电阻又称为光导管,是一种均质的半导体光电器件,其结构如图(1)所示。由于半导体在光照的作用下,电导率的变化只限于表面薄层,因此将掺杂的半导体薄膜沉积在绝缘体表面就制成了光敏电阻,不同材料制成的光敏电阻具有不同的光谱特性。光敏电阻采用梳状结构是由于在间距很近的电阻之间有可能采用大的灵敏面积,提高灵敏度。 实验所需部件: 稳压电源、光敏电阻、负载电阻(选配单元)、电压表、 各种光源、遮光罩、激光器、光照度计(由用户选配) 实验步骤: 1、测试光敏电阻的暗电阻、亮电阻、光电阻 观察光敏电阻的结构,用遮光罩将光敏电阻完全掩 盖,用万用表测得的电阻值为暗电阻 R暗,移开遮光罩,在环境光照下测得的光敏电阻的 阻值为亮电阻,暗电阻与亮电阻之差为光电阻,光 电阻越大,则灵敏度越高。 在光电器件模板的试件插座上接入另一光敏电阻, 试作性能比较分析。 2、光敏电阻的暗电流、亮电流、光电流 按照图(3)接线,电源可从+2~+8V间选用,分别在暗光和正常环境光照下测出输出电压V暗和V亮则暗电流L暗=V暗/R L,亮电流L亮=V亮/R L,亮电流与暗电流之差称为光电流,光电流越大则灵敏度越高。 分别测出两种光敏电阻的亮电流,并做性能比较。 图(2)几种光敏电阻的光谱特性 3、伏安特性: 光敏电阻两端所加的电压与光电流之间的关系。 按照图(3)分别测得偏压为2V、4V、6V、8V、10V、12V时的光电流,并尝试高照射光源的光强,测得给定偏压时光强度的提高与光电流增大的情况。将所测得的结果填入表格并作出V/I曲线。 注意事项: 实验时请注意不要超过光电阻的最大耗散功率P MAX, P MAX=LV。光源照射时灯胆及灯杯温度均很高,请勿用手触摸,以免烫伤。实验时各种不同波长的光源的获取也可以采用在仪器上的光源灯泡前加装各色滤色片的办法,同时也须考虑到环境光照的影响。
激光脉冲测距实验报告
百度文库- 让每个人平等地提升自我 激光脉冲测距 组长:孙汉林(制作PPT) 组员:张莹(讲解) 吕富敏(制作报告)
目录 一工作原理 (3) (1)测距仪工作原理 (3) (2)激光脉冲测距仪光学原理结构 (3) (3)测距仪的大致结构组成 (4) (4)主要的工作过程 (4) (5)激光脉冲发射、接收电路板组成及工作原理 (5) 二激光脉冲测距的应用领域 (5) 三关键问题及解决方法 (6) (1)优点 (6) (2)问题及解决方案 (7)
一工作原理 (1)测距仪工作原理 现在就脉测距仪冲激光测距简要叙述其工作原理。简单地讲,脉冲法测距的过程是这样的:测距仪发射出的激光经被测量物体的反射后又被测距仪接收,测距仪同时记录激光往返的时间t,光速 c 和往返时间t 的乘积的一半,就是测距仪和被测量物体之间的距离。一般一个典型的激光测距系统应具备以下四个模块:激光发射模块;激光接收模块;距离计算与显示模块;激光准直与聚焦模块,如图2-1 所示。系统工作时,由发射单元发出一束激光,到达待测目标物后漫反射回来,经接收单元接收、放大、整形后到距离计算单元计算完毕后显示目标物距离。在测距点向被测目标发射一束强窄激光脉冲,光脉冲传输到目标上以后,其中一小部分激光反射回测距点被测距系统光功能接收器所接受。假定光脉冲在发射点与目标间来回一次所经历的时间间隔为t,那么被测目标的距离 D 为:式中:c 为激光在大气中的传播速度;D 为待测距离;t 为激光在待测距离上的往返时间。 R=C*T/2 (公式1) 图一脉冲激光测距系统原理框图 (2)激光脉冲测距仪光学原理结构
超声波测距实验报告
电子信息系统综合设计报告 超声波测距仪
目录 摘要 (3) 第一章绪论 (3) 1.1 设计要求 (3) 1.2 理论基础 (3) 1.3 系统概述 (4) 第二章方案论证 (4) 2.1 系统控制模块 (5) 2.2距离测量模块 (5) 2.3 温度测量模块 (5) 2.4 实时显示模块 (5) 2.5 蜂鸣报警模块 (6) 第三章硬件电路设计 (6) 3.1 超声波收发电路 (6) 3.2 温度测量电路 (7) 3.3 显示电路 (8) 3.4 蜂鸣器报警电路 (9) 第四章软件设计 (10) 第五章调试过程中遇到的问题及解决 (11) 5.1 画PCB及制作 (11) 5.2 焊接问题及解决 (11) 5.3 软件调试 (11) 实验总结 (13) 附件 (14) 元器件清单 (14) HC-SR04超声波测距模块说明书 (15) 电路原理图 (17) PCB图 (17) 程序 (18)
摘要 该系统是一个以单片机技术为核心,实现实时测量并显示距离的超声波测距系统。系统主要由超声波收发模块、温度补偿电路、LED显示电路、CPU处理电路、蜂鸣器报警电路等5部分组成。系统测量距离的原理是先通过单片机发出40KHz 方波串,然后检测超声波接收端是否接收到遇到障碍物反射的回波,同时测温装置检测环境温度。单片机利用收到回波所用的时间和温度补偿得到的声速计算出距离,显示当前距离与温度,按照不同阈值进行蜂鸣报警。由于超声波检测具有迅速、方便、计算简单、易于做到实时控制的特点,并且在测量精度方面能达到工业实用的要求,因此在生产生活中得到广泛的应用,例如超声波探伤、液位测量、汽车倒车雷达等。 关键词:超声波测距温度测量单片机 LED数码管显示蜂鸣报警 第一章绪论 1.1设计要求 设计一个超声波测距仪,实现以下功能: (1)测量距离要求不低于2米; (2)测量精度±1cm; (3)超限蜂鸣器或语音报警。 1.2理论基础 一、超声波传感器基础知识 超声波传感器是利用晶体的压电效应和电致伸缩效应,将机械能与电能相互转换,并利用波的特性,实现对各种参量的测量。 超声波的传播速度与介质的密度和弹性特性有关,与环境条件也有关: 在气体中,超声波的传播速度与气体种类、压力及温度有关,在空气中传播速度为C=331.5+0.607t/0C (m/s) 式中,t为环境温度,单位为0C. 二、压电式超声波发生器原理 压电式超声波发生器实际上是利用压电晶体的谐振来工作的。它有两个压电晶片和一个共振板。当它的两极外加脉冲信号,其频率等于压电晶片的固有振荡频率时,压电晶片将会发生共振,并带动共振板振动,便产生超声波。反之,如果两电极间未外加电压,当共振板接收到超声波时,将压迫压电晶片作振动,将机械能转换为电信号,这时它就成为超声波接收器了。 三、超声波测距原理 由于超声波指向性强,能量消耗缓慢,在空气中传播的距离较远,因而超声波
CO2激光器原理及应用
目录 摘要 (1) 关键词 (1) Abstract (1) Keywords (1) 1引言 (2) 2激光 (2) 2.1激光产生的三个条件 (3) 2.2激光的特点 (3) 2.3激光器 (3) 3 CO2激光器的原理 (5) 3.1 CO2激光器的基本结构 (5) 3.2 CO2激光器基本工作原理 (7) 3.3 CO2激光器的优缺点 (8) 4 CO2激光器的应用 (9) 4.1军事上的应用 (9) 4.2医疗上的应用 (10) 4.3工业上的应用 (12) 5 CO2激光器的研究现状与发展前景 (14) 5.1 CO2激光器的研究现状 (14) 5.2 CO2激光器的发展前景 (15) 6 结束语 (17) 参考文献 (19) 致谢 (20)
摘要:本文从引言出发介绍了CO2激光技术的基本情况,简单介绍了激光和激光器的一些特点,重点介绍了气体激光器中的CO2激光器的相关应用,目前CO2激光器是用最广泛的激光器之一,它有着一些非常突出的高功率、高质量等优点。论文首先介绍了应用型CO2激光器的基本结构和工作原理,着重介绍了应用型CO2激光器在军事、医疗和工业三个主要领域的应用,最后介绍应用型CO2激光器的研究前景和现状。通过这些介绍使得人们能够加深对CO2激光器的了解和认识。 关键词: CO2激光器;基本原理;基本结构;应用; Abstract: This departure from the introduction of CO2 laser technology, introduced the basic situation, briefly introduced some of the characteristics of laser and laser to highlight the CO 2gas laser in laser-related applications, the current CO 2 laser was one of the most extensive laser, it had some very prominent high-power, high quality and so on. Paper introduced the application of CO 2 laser-type basic structure and working principle, focusing on the application type CO 2 laser in the military, medical and industrial application of the three main areas, Finally, applied research prospects for CO 2 laser and status. Through these presentations allowed people to deepen their knowledge and understanding of CO s lasers. Keywords:CO2Laser Basic Principle Basic Structure Application
半导体激光器工作原理及主要参数
半导体激光器工作原理及主要参数 OFweek激光网讯:半导体激光器又称为激光二极管(LD,Laser Diode),是采用半导体材料作为工作物质而产生受激发射的一类激光器。常用材料有砷化镓(GaAs)、硫化镉(CdS)、磷化铟(InP)、硫化锌(ZnS)。激励方式有电注入、电子束激励和光泵浦激励三种形式。半导体激光器件,一般可分为同质结、单异质结、双异质结。同质结激光器和单异质结激光器室温时多为脉冲器件,而双异质结激光器室温时可实现连续工作。半导体激光器的优点在于体积小、重量轻、运转可靠、能耗低、效率高、寿命长、高速调制,因此半导体激光器在激光通信、光存储、光陀螺、激光打印、激光医疗、激光测距、激光雷达、自动控制、检测仪器等领域得到了广泛的应用。 半导体激光器工作原理是:通过一定的激励方式,在半导体物质的能带(导带与价带)之间,或者半导体物质的能带与杂质(受主或施主)能级之间,实现非平衡载流子的粒子数反转,当处于粒子数反转状态的大量电子与空穴复合时便产生受激发射作用。半导体激光器的激励方式主要有三种:电注入式、电子束激励式和光泵浦激励式。电注入式半导体激光器一般是由GaAS(砷化镓)、InAS(砷化铟)、Insb(锑化铟)等材料制成的半导体面结型二极管,沿正向偏压注入电流进行激励,在结平面区域产生受激发射。电子束激励式半导体激光器一般用N型或者P型半导体单晶(PbS、CdS、ZhO等)作为工作物质,通过由外 部注入高能电子束进行激励。光泵浦激励式半导体激光器一般用N型或P型半导体单晶(GaAS、InAs、InSb等)作为工作物质,以其它激光器发出的激光作光泵激励。 目前在半导体激光器件中,性能较好、应用较广的是:具有双异质结构的电注入式GaAs 二极管半导体激光器。 半导体光电器件的工作波长与半导体材料的种类有关。半导体材料中存在着导带和价带,导带上面可以让电子自由运动,而价带下面可以让空穴自由运动,导带和价带之间隔着一条禁带,当电子吸收了光的能量从价带跳跃到导带中去时就把光的能量变成了电,而带有电能的电子从导带跳回价带,又可以把电的能量变成光,这时材料禁带的宽度就决定了光电器件的工作波长。 小功率半导体激光器(信息型激光器),主要用于信息技术领域,例如用于光纤通信及光交换系统的分布反馈和动态单模激光器(DFB-LD)、窄线宽可调谐激光器、用于光盘等信息处理领域的可见光波长激光器(405nm、532nm、635nm、650nm、670nm)。这些 器件的特征是:单频窄线宽、高速率、可调谐、短波长、光电单片集成化等。 大功率半导体激光器(功率型激光器),主要用于泵浦源、激光加工系统、印刷行业、生物医疗等领域。 半导体激光器主要参数: 波长nm:激光器工作波长,例如405nm、532nm、635nm、650nm、670nm、690nm、780nm、810nm、860nm、980nm。 阈值电流Ith:激光二极管开始产生激光振荡的电流,对小功率激光器而言其值约在数 十毫安。
激光脉冲测距实验报告
激光脉冲测距 组长:孙汉林(制作PPT) 组员:张莹(讲解) 吕富敏(制作报告)
目录 一工作原理 (3) (1)测距仪工作原理 (3) (2)激光脉冲测距仪光学原理结构 (3) (3)测距仪的大致结构组成 (4) (4)主要的工作过程 (4) (5)激光脉冲发射、接收电路板组成及工作原理 (5) 二激光脉冲测距的应用领域 (5) 三关键问题及解决方法 (6) (1)优点 (6) (2)问题及解决方案 (7)
一工作原理 (1)测距仪工作原理 现在就脉测距仪冲激光测距简要叙述其工作原理。简单地讲,脉冲法测距的过程是这样的:测距仪发射出的激光经被测量物体的反射后又被测距仪接收,测距仪同时记录激光往返的时间t,光速 c 和往返时间t 的乘积的一半,就是测距仪和被测量物体之间的距离。一般一个典型的激光测距系统应具备以下四个模块:激光发射模块;激光接收模块;距离计算与显示模块;激光准直与聚焦模块,如图2-1 所示。系统工作时,由发射单元发出一束激光,到达待测目标物后漫反射回来,经接收单元接收、放大、整形后到距离计算单元计算完毕后显示目标物距离。在测距点向被测目标发射一束强窄激光脉冲,光脉冲传输到目标上以后,其中一小部分激光反射回测距点被测距系统光功能接收器所接受。假定光脉冲在发射点与目标间来回一次所经历的时间间隔为t,那么被测目标的距离 D 为:式中:c 为激光在大气中的传播速度;D 为待测距离;t 为激光在待测距离上的往返时间。 R=C*T/2 (公式1) 图一脉冲激光测距系统原理框图 (2)激光脉冲测距仪光学原理结构
图二 (3)测距仪的大致结构组成 脉冲激光测距仪主要由脉冲激光发射系统、光电接收系统、门控电路、时钟脉冲振荡器以及计数显示电路组成 (4)主要的工作过程 其工作过程大致如下:首先接通电源,复原电路给出复原信号,使整机复原,准备进行测量;同时触发脉冲激光发生器,产生激光脉冲。该激光脉冲有一小部分能量由参考信号取样器直接送到接收系统,作为计时的起始点。大部分光脉冲能量射向待测目标,由目标反射回测距仪的光脉冲能量被接收系统接收,这就是回波信号。参考信号和回波信号先后由光电探测器转换成为电脉冲,并加以放大和整形。整形后的参考信号能触发器翻转,控制计数器开始对晶格振荡器发出的时钟脉冲进行计数。整形后的回波信号使触发器的输出翻转无效,从而使计数器停止工作。这样,根据计数器的输出即可计算出待测目标的距离。三实验装置实验装置包括“激光脉冲发射、接收电路”和“单片机开放板”。
光电探测实验报告
光电探测技术 实验报告 班级:10050341 学号:05 姓名:解娴
实验一光敏电阻特性实验 一、实验目的 1.了解一些常见的光敏电阻的器件的类型; 2.了解光敏电阻的基本特性; 3.测量不同偏置电压下的光敏电阻的电压与电流,并作出V/A曲线。 二、实验原理 伏安特性显示出光敏电阻与外光电效应光电元件间的基本差别。这种差别是当增加电压时,光敏电阻的光电流没有饱和现象,因此,它的灵敏度正比于外加电压。 光敏电阻与外光电效应光电元件不同,具有非线性的光照特性。各种光敏电阻的非线性程度都是各不相同的。 大多数场合证明,各种光敏电阻均存在着分析关系。这一关系为 式中,K为比例系数;是永远小于1的分数。 光电流的增长落后于光通量的增长,即当光通量增加时,光敏电阻的积分灵敏度下降。 这样的光照特性,使得解算许多要求光电流与光强间必需保持正比关系的问题时不能利用光敏电阻。 光照的非线性特性并不是一切光敏半导体都必有的。目前已有就像真空光电管—样,它的光电流随光通量线性增大的光敏电阻的实验室试样。光敏电阻的积分灵敏度非常大,最近研究出的硒—鎘光敏电阻达到12A/lm,这比普通锑、铯真空光电管的灵敏度高120,000倍。
三、实验步骤 1、光敏电阻的暗电流、亮电流、光电流 按照图1接线,电源可从+2V~+8V间选用,分别在暗光和正常环境光照下测出输出电压V暗和V亮。则暗电流L暗=V暗/RL,亮电流L亮=V亮/RL,亮电流与暗电流之差称为光电流,光电流越大则灵敏度越高。 2、伏安特性 光敏电阻两端所加的电压与光电流之间的关系即为伏安特性。按照图1接线,分别测得偏压为2V、4V、6V、8V、10V时的光电流,并尝试高照度光源的光强,测得给定偏压时光强度的提高与光电流增大的情况。将所测得的结果 填入表格并做出V/I曲线。 图1光敏电阻的测量电路 偏压2V4V6V8V10V12V 光电阻I 四、实验数据 实验数据记录如下: 光电流: E/V246810 U/V0.090.210.320.430.56 I/uA1427.54255.270.5 暗电流:0.5uA 实验数据处理:
常用激光器简介
几种常用激光器的概述 一、CO2激光器 1、背景 气体激光技术自61年问世以来,发展极为迅速,受到许多国家的极大重视。特别是近两年,以二氧化碳为主体工作物质的分子气体激光器的进展更为神速,已成为气体激光器中最有发展前途的器件。 二氧化碳分子气体激光器不仅工作波长(10.6微米)在大气“窗口”,而且它正向连续波大功率和高效率器件迈进。1961年,Pola-nyi指出了分子的受激振动能级之间获得粒子反转的可能性。在1964年1月美国贝尔电话实验室的C.K.N.Pate 研制出第一支二氧化碳分子气体激光器,输出功率仅为1毫瓦,其效率为0.01%。不到两年,现在该类器件的连续波输出功率高达1200瓦,其效率为17 %,电源激励脉冲输出功率为825瓦,采用Q开关技术已获得50千瓦的脉冲功率输出。最近,有人认为,进一步提高现有的工艺水平,近期可以达到几千瓦的连续波功率输出和30~40% 的效率。 2、工作原理 CO2激光器中,主要的工作物质由CO?,氮气,氦气三种气体组成。其中CO?是产生激光辐射的气体、氮气及氦气为辅助性气体。加入其中的氦,可以加速010能级热弛预过程,因此有利于激光能级100及020的抽空。氮气加入主要在CO?激光器中起能量传递作用,为CO?激光上能级粒子数的积累与大功率高效率的激光输出起到强有力的作用。CO?分子激光跃迁能级图CO?激光器的激发条件:放电管中,通常输入几十mA或几百mA的直流电流。放电时,放电管中的混合气体内的氮分子由于受到电子的撞击而被激发起来。这时受到激发的氮分子便和CO?分子发生碰撞,N2分子把自己的能量传递给CO2分子,CO?分子从低能级跃迁到高能级上形成粒子数反转发出激光。 3、特点 二氧化碳分子气体激光器不但具有一般气体激光器的高度相干性和频率稳定性的特点,而且还具有另外三个独有的特点: (1)工作波长处于大气“窗口”,可用于多路远距离通讯和红外雷达。 (2)大功率和高效率( 目前,氩离子激光器最高连续波输出功率为100瓦,其效率为0.17 %,原子激光器的连续波输出功率一般为毫瓦极,其效率约为0.1%,而二氧化碳分子激光器连续波输出功率高达1200瓦,其效率为17%)。 (3)结构简单,使用一般工业气体,操作简单,价格低廉。由此可见,随着研究工作的进展、新技术的使用,输出功率和效率会不断提高,寿命也会不断增长,将会出现一系列新颖的应用。例如大气和宇宙通讯、相干探测和导航、超外
自相关仪超快飞秒脉冲激光测量
超快飞秒脉冲激光测量 一、超快激光是什么? 我们所说的超快激光器,一般是指脉冲宽度达到 皮秒 量级的脉冲激光器。其具有一下特点: (1)具有极短的激光脉冲。脉冲持续时间只有几个皮 秒或飞秒。 (2)具有极高的峰值功率。其电场远远强于原子内库 仑场,具有极高的电场强度,足以使任何材料发生电 离。 近十几年来,由于啁啾脉冲放大(chirped pulse amplification, 简称CPA)技术的提出和应用,宽带 激光晶体材料(如掺钛蓝宝石)的出现,以及克尔透 镜锁模技术的发明,使超强超快激光技术得到迅猛发 展。小型化飞秒太瓦(1012瓦)甚至更高数量级的超 强超快激光系统已在各国实验室内建成并发挥重要作用。图1、100飞秒激光器时域分布最近,更短脉冲和更高功率的激光输出,如直接由激光振荡器产生的短于5飞秒的激光脉冲,小型化飞秒100太瓦级超强超快激光系统,以及 CPA技术应用到传统大型钕玻璃激光装置 上获得1拍瓦(1015瓦)级激光输出已有 报道,激光功率密度达到1019~1020瓦 / 厘米2的超强超快激光与物质相互作用研 究也已开始进行。 传统的激光放大采用直接的行波放大,而 对超短激光脉冲来说,随着能量的提高, 其峰值功率将很快增加,并出现各种非线 性效应及增益饱和效应,从而限制了能量的进一步放大。图2、脉冲序列分布 CPA技术的原理是,在维持光谱宽度不变的情况下通过色散元件将脉冲展宽好几个数量级,形成 所谓的啁啾脉冲。这样,在放大过程中,即使激光脉冲的 能量增加很快,其峰值功率也可以维持在较低水平,从而 避免出现非线性效应及增益饱和效应,保证激光脉冲能量 的稳定增长。当能量达到饱和放大可获得的能量之后,借 助与脉冲展宽时色散相反的元件将脉冲压缩到接近原来 的宽度,即可使峰值功率大大提高。 为了突破CPA技术的一些局限性,目前国际上正在积 极探索发展新一代超强超快激光的新原理与新方法,如啁 啾脉冲光学参量放大(OPCPA)原理,目标是创造更强更 快的强场超快极端物理条件,特别是 图3、钛蓝宝石超快激光器
激光脉冲测距实验报告
激光脉冲测距实验报告 一.实验目的 通过学习激光脉冲测距的工作原理,了解激光脉冲测距 系统的组成,搭建室模拟激光器系统进行正确测距,为今后 的工程设计奠定理论基础和工程实践基础。 二.实验原理 激光脉冲测距与雷达测距在原理上是完全相同的,如图2.1所示。 在测距点激光发射机发射激光脉冲,光脉冲经过光纤到达接收端,并被测距机上的探测系统接收。测出从激光发射时刻到被接收时刻之间的时间间隔t,根据已知光速,即可求出光纤的长度R为 R=/2 (2-1) 式中c为光速。真空中的光速是一个精确的物理常数 C1=299792458 m/s 光纤中的平均折射率n为 n=1.45(查阅得知) 故光纤中的光速为 C=299710000 可见,激光测距的任务就是准确地测定时间间隔t。当不考虑光纤中光速的微小变化时,测距精度⊿R主要是由测时精度⊿t确定的 ⊿R=C⊿t/2 (2-2) 实际脉冲激光测距机中是利用时钟晶体振荡器和脉冲计数器来测定时间间隔 t的。时钟晶体振荡器用于产生固定的频率的电脉冲振荡,脉冲计数器的作用是对晶体产生的电脉冲个数进行计数。设晶体振荡器产生的电脉冲频率为f,则脉冲间隔T=1/f。若从激光脉冲发出时刻脉冲计数器开始计数,到光脉冲被接收时刻停止计数。设这段时间脉冲计数器共计得脉冲个数为m,则可计算出被测光纤的长度为 R=cmT=cm/f=1.6m (2-3) 相应的测距精度为
⊿R =Ct=c/f (2-4) 可见,脉冲激光测距机的测距精度由晶振的频率决定。常用军用激光测距仪的晶振频率有15MHz、30MHz、75MHz和150MHz等,与其相对应的测距精度分别为正负10m、正负5m 、正负2m和正负1m。晶振的频率愈高,测距精度就愈高, 但随之而来的,不仅是计数器的技术难度增加,而且要求激光脉冲的宽度愈窄,激光器的难度也增加。 对脉冲测距系统,计数器的“开门”信号是由取出一小部分发射激光脉冲经光探测器转换成电信号形成的。这两个信号既可由同一探测器提供,也可以用两个探测器提供。 激光脉冲测距机由激光器、发射光学系统、接收及瞄准光学系统、取样及回波探测放大系统、技数及显示器和电源几部分组成,如图2.2所示 系统操作人员一旦下达发射激光命令,激光器发射一束窄激光脉冲,经发射光学系统扩束后射向接收系统,其中一小部分经取样后启动计数器开始计数。激光回波经测距机的接收和瞄准光学系统,聚焦到前面有窄带滤光片的光探测器上。由探测器将其转换成电信号,再经取样及回波探测放大系统处理后产生“关门”信号用于关闭计数器。由计数器计得的脉冲个数计算出光纤得电源计数及显示器激光器长度,再通过显示器显示出来。 三.实验装置 实验装置包括“激光脉冲发射/接收电路板”、电脑和“单片机开放板”。 1.激光脉冲发射/接收电路板组成及工作原理 激光脉冲发射/接收电路板原理框图如图2.3所示。图中EMP 3032为CPLD;MAX3656为激光驱动器;MAX3747为限幅放大器;T22为单端信号到分差信号转换芯片;T23为差分信号单短信号转换芯片;LD为半导体激光器;PD为光探测器。板子上端的EMP3032被编程为脉冲发生器,输出重复频率为1KHz,脉冲宽度为48ns的电脉冲信号。此信号经MAX3656放大后驱动LD发光。板子下端的EMP 3032被编程为计数器,对125MHz 晶振计数器。其计数的开门信号来自上端的TX信号,关门信号来自PD的输出。计数器的计数结果采用12位二进制数据输出,对应时间围为0~32.76us.
激光散斑测量实验报告
实验报告 陈杨 PB05210097 物理二班 实验题目:激光散斑测量 实验目的: 了解单光束散斑技术的基本概念,并应用此技术测量激光散斑的大小和毛玻璃的面内位移。 实验内容: 本实验中用到的一些已知量:(与本次实验的数据略有不同) 激光波长λ = 0.0006328mm 常数π = 3.14159265 CCD像素大小=0.014mm 激光器内氦氖激光管的长度d=250mm 会聚透镜的焦距f’=50mm 激光出射口到透镜距离d1=650mm 透镜到毛玻璃距离=d2+P1=150mm 毛玻璃到CCD探测阵列面P2=550mm 毛玻璃垂直光路位移量dξ和dη, dξ=3小格=0.03mm,dη=0 光路参数:P1=96.45mm ρ(P1)=96.47mm P2= 550mm dξ=3小格=0.03mm (理论值) 数据及处理: 光路参数: P1+d2=15cm P2=52.5cm
d1=激光出射口到反射镜的距离+反射镜到透镜距离=33.6+28.5=62.1cm f ’=5cm d=250mm λ=632.8nm (1)理论值S 的计算: 经过透镜后其高斯光束会发生变换,在透镜后方形成新的高斯光束 由实验讲义给的公式: 2'2 012'11 '' 2)()1(d f W f d d f f λπ+--- = πλd W 01= 201W d πλ= 代入数据,可得: '' 1 21 221''12 2 22 01 02 2 2 2101102 d 15(1)() 5 62.11559.6332439.63362.12515511f d f cm P d d f f cm cm P cm cm cm cm cm cm cm cm d W W d d W d f f W λπ πλ???? ? ? ???? ?????? ?? ? ? ? ? ? ? ? ????? ???? -=-=--+-=-+ =≈-+= = -+-+= 可得 由公式-31.80010cm ≈? 此新高斯光束射到毛玻璃上的光斑大小W 可以由计算氦氖激光器的
2020年常用激光器简介
作者:非成败 作品编号:92032155GZ5702241547853215475102 时间:2020.12.13 几种常用激光器的概述 一、CO2激光器 1、背景 气体激光技术自61年问世以来,发展极为迅速,受到许多国家的极大重视。特别是近两年,以二氧化碳为主体工作物质的分子气体激光器的进展更为神速,已成为气体激光器中最有发展前途的器件。 二氧化碳分子气体激光器不仅工作波长(10.6微米)在大气“窗口”,而且它正向连续波大功率和高效率器件迈进。1961年,Pola-nyi指出了分子的受激振动能级之间获得粒子反转的可能性。在1964年1月美国贝尔电话实验室的C.K.N.Pate 研制出第一支二氧化碳分子气体激光器,输出功率仅为1毫瓦,其效率为0.01%。不到两年,现在该类器件的连续波输出功率高达1200瓦,其效率为17 %,电源激励脉冲输出功率为825瓦,采用Q开关技术已获得50千瓦的脉冲功率输出。最近,有人认为,进一步提高现有的工艺水平,近期可以达到几千瓦的连续波功率输出和30~40% 的效率。 2、工作原理 CO2激光器中,主要的工作物质由CO?,氮气,氦气三种气体组成。其中CO?是产生激光辐射的气体、氮气及氦气为辅助性气体。加入其中的氦,可以加速010能级热弛预过程,因此有利于激光能级100及020的抽空。氮气加入主要在CO?激光器中起能量传递作用,为CO?激光上能级粒子数的积累与大功率高效率的激光输出起到强有力的作用。CO?分子激光跃迁能级图CO?激光器的激发条件:放电管中,通常输入几十mA或几百mA的直流电流。放电时,放电管中的混合气体内的氮分子由于受到电子的撞击而被激发起来。这时受到激发的氮分子便和CO?分子发生碰撞,N2分子把自己的能量传递给CO2分子,CO?分子从低能级跃迁到高能级上形成粒子数反转发出激光。 3、特点 二氧化碳分子气体激光器不但具有一般气体激光器的高度相干性和频率稳定性的特点,而且还具有另外三个独有的特点: (1)工作波长处于大气“窗口”,可用于多路远距离通讯和红外雷达。 (2)大功率和高效率( 目前,氩离子激光器最高连续波输出功率为100瓦,
超声波测距实验报告
目录 1、课题设计的目的和意义 (3) 2、课题要求 (3) 2.1、基本功能要求 (3) 2.2、提高要求 (4) 3、重要器件功能介绍 (4) 3.1、CX20106A红外线发射接收专用芯片 (4) 3.2、AT89C51系列单片机的功能特点 (5) 3.3、ISD1700优质语音录放电路 (6) 4、超声波测距原理 (8) 4.1、超声波测距原理图 (8) 4.2、超声波测距的基本原理 (9) 5、硬件系统设计 (10) 5.1、超声波发射单元 (10) 5.2、超声波接收单元 (11)
5.3、显示单元 (11) 5.4、语音单元 (12) 5.5、硬件设计中遇到的难题: (12) 6、系统软件设计 (14) 7、调试与分析 (15) 7.1调试 (15) 7.2误差分析 (15) 8、总结 (16) 9、附件 (17) 9.1、总电路 (17) 9.2、主要程序 (18) 10、参考文献 (22)
1课题设计的目的及意义 随着科学技术的快速发展,超声波在测距仪中的应用越来越广,但就目前技术水平而言,人们可以利用的测距技术还十分有限,因此,这是一个正在蓬勃发展而又有无限前景的技术及产业领域。展望未来,超声波测距作为一种新型的非常重要有用的工具在各方面都有很大的发展空间,它将朝着更加高定位高精度的方向发展,以满足日益发展的社会需求。如声纳的发展趋势:研究具体的高定位精度的被动测距声纳,以满足军事和渔业等的发展需求,实现远程的被动探测和识别。毋庸置疑,未来的超声波测距仪将与自动化智能化接轨,与其他的测距仪集成和融合,形成多测距仪。 超声波测距在某些场合有着显著的优点,因为这种方法是利用计算超声波在被测物体和超声波探头之间的传输来测量距离的,因此它是一种非接触式的测量,所以他就能够在某些场合或环境比较恶劣的环境下使用。比如测有毒或者有腐蚀性化学物质的液面高度或者高速公路上快速行驶汽车之间的距离。 随着测距仪的技术进步,测距仪将从具有单纯判断功能发展到具有学习功能,最注重发展到具有创造力。在新的时代,测距仪将发挥更大的作用。 2课题要求 以单片机AT89C51为中心控制单元,配以超声波发射、接收装置,实现超声波发射及接收其遇到障碍物发生反射形成的回波信号,并根据超声波在介质中的传播速度及超声波从发射到接收到回波的时间,计算出发射点距障碍物的距离,设计出一套基于单片机的脉冲反射式超声波测距系统,利用单片机进行操作控制,用数码管作输出显示,设计发射、接收、检测、显示硬件电路和测距系统软件。
超短脉冲激光技术(钱列加老师)
5.6 (3) 一.概述 (3) 1.飞秒激光脉冲的特性 (3) 2.飞秒脉冲的传输 (5) 3.光束空间传输 (6) 4.脉冲传输的数值模拟 (6) 5.时空效应 (9) 5.1自相位调制 (10) 5.2相位调制对有限光束的影响——自聚焦 (11) 二.飞秒光学 (13) 1.简介 (13) 2.色散元件 (13) 2.1 膜层色散 (13) 2.2 材料体色散 (13) 2.3 角色散元件 (14) 3.群速度色散的补偿及控制 (14) 4.聚焦元件 (16) 4.1 透镜的色差 (16) 4.2 脉冲畸变与PTD效应 (16) 三.飞秒激光器 (18) 1.锁模简介 (18) 2.克尔透镜锁模 (18) 3.飞秒激光振荡器 (20) 4.光纤孤子激光器 (21) 四.飞秒脉冲的放大与压缩 (23) 1.简介 (23) 2.飞秒脉冲放大的困难 (25) 3.啁啾脉冲放大技术 (26) 4.CP A放大器的设计 (27) 4.1 CP A激光系统的工作脉宽 (27) 4.2 高增益的前置放大器 (27) 4.3 装置的色散控制 (28) 4.4 设计多程CP A放大器的理论模型 (31) 五.脉冲整形 (34) 1.脉冲整形 (34) 2.飞秒光脉冲整形的物理基础 (34) (1)线性滤波 (34) (2)脉冲整形装置 (35) (3)脉冲整形的控制 (38) 3.几种典型的空间光调制器 (39) (1)可编程液晶空间光调制器(LC SLM) (39) A.电寻址方式 (39) B.光寻址方式 (40) (2)声光调制器 (41)
(3)变形镜 (41) 4.脉冲压缩 (42) 2.1 波导介质中的SPM (42) 2.2 级联非线性压缩脉冲 (43) 六.脉冲时间诊断技术 (45) 1.强度相关 (45) (1) 多次平均测量 (45) (2) 单次工作方式 (47) (3) 三次相关法 (48) 2.干涉相关 (49) 3.脉冲振幅与位相的重建 (50) 七.大口径高功率激光装置 (53) 1.高能量的PW钛宝石/钕玻璃混合系统 (55) 2.关键技术问题 (56) 2.1 高阶色散 (57) 2.2 光谱窄化和漂移引起的光谱畸变 (57) 2.3 非线性自位相调制SPM (58) 2.4 自发辐射放大ASE (58) 3.光参量啁啾脉冲放大(OPCPA) (58) 3.1 大口径高能钕玻璃泵浦的OPCPA 系统 (62) 3.2 小口径低能量高重复率OPCPA 系统 (63) 4.展望 (64) 4.1 峰值功率的理论极限 (64) 4.2 光学元件的限制 (65) 4.3 非线性B积分的限制 (65)
课程设计-脉冲激光测距仪
目录 第一章引言 (2) 1.1激光测距技术 (2) 1.2激光测距的发展状况 (2) 第二章脉冲测距仪的工作原理 (4) 2.1测距仪的基本工作原理 (4) 2.2脉冲激光测距实现的原理及光电读数的实现方法 (5) 第三章部件分析 (7) 3.1激光器 (7) 3.2光电器件 (7) 第四章激光测距系统性能分析 (8) 4.1光脉冲对测距仪的影响 (8) 4.2发散角对测距仪的影响 (8) 4.3测距系统信噪比分析 (9) 第五章测距仪的精度分析 (10) 5.1精度分析 (10) 5.2提高脉冲激光测距精度的措施 (10) 第六章激光测距仪总体设计 (14) 总结 (16)
第一章引言 1.1 激光测距技术 激光测距是指根据激光往返待测距离的时间来测定距离的方法,激光测距技术是随着激光技术的出现而发展起来的一种精密测量技术,因其良好的测距性能而广泛应用在军事和民用领域。 自1960年美国T.H.Maiman博士制成世界上第一台红宝石激光器开始,激光优异的单色性、方向性和高亮度性就引起了人们的普遍关注。激光的这些特性,决定着它成为理想的测距光源。国内外均大力开展了激光测距系统的研制工作。1961年美国就成功的研制了世界上最早的红宝石激光测距系统,1969年美国又首次将激光测距系统应用于坦克火控系统。从此,激光测距技术发展迅猛,广泛的应用于战场上。 激光测距方法从原理上分主要有相位测距法和脉冲测距法两种。由于相位测量技术较为成熟,因此测距精度较高,目前的测距技术大多采用此法,但相位测距电路较为复杂,技术难度较大,测程短。脉冲式测距方法结构简单,信号易于处理,并且易于实现实时测量,具有测程长的优点,因此发展潜力很大。 1.2激光测距的发展状况 激光测距技术与其它测距技术相比,具有测量距离远、抗干扰能力强、非接触目标、测量速度快、测距精度高等特点。目前,脉冲激光测距已获得了广泛的应用,如地形测量、战术前沿测距、导弹运行轨道跟踪、以及人造卫星、地球到月球距离的测量等。随着激光技术、数字电子技术、计算技术和集成电路的发展,激光脉冲测距正朝着低成本、模块化、小型化方向发展。 脉冲半导体激光测距技术的研究起始于20世纪60年代末,到80年代中期陆续解决了激光器件、光学系统以及信号处理电路中的关键技术,80年代后期转入应用研究阶段并研制出了各种不同样机,90年代中期各种成熟的产品不断出现,近期半导体激光测距发展迅速,在中、近激光测距方面有取代YAG激光的趋势。 2008年,中国计量学院余向东、张在宣、王剑锋等人研制了一种能有效地减少因接收信号幅度变化而引起的漂移误差和晶振时钟计时误差的小型高精度脉