最优化方法教学大纲12版

《最优化方法》课程教学大纲
课程编码:0401323
英文名称:Methods of optimization
教学对象:数学与应用数学专业本科学生
学时学分:共32学时,2学分
先修课程:高等代数、数学分析
执笔人:霍丽娜审校人:宋文檀
修订时间:2012 年7月
一、课程简介
最优化方法属于专业任选课程,课程安排在第七学期。最优化是从所有可能方案中选择最合理的方案以达到最优目标的学科,是随着计算机的普遍应用而发展起来的,它已广泛应用于各个领域。本门课程旨在讲授最优化的基本理论和方法,要求通过本课程的学习,具有应用最优化方法解决一些实际问题的初步技能,并为以后的学习和工作做必要的准备。二、课程教学目的与基本要求
本课程的任务是讨论求解线性规划、无约束非线性规划、约束非线性规划、多目标规划的基本原理与一般方法,并学习MA TLAB、LINGO 等工具软件的应用,使学生掌握最优化方法的基本概念、基本原理和基本方法,初步学会应用最优化方法解决简单的实际优化问题,培养解决实际问题的能力。
基本要求:
1、掌握最优化方法的基本概念、相关的优化原理和最常用的算法,注意方法处理的技巧及其与计算机的结合,提高计算机应用能力;
2、通过例子,学习使用各种优化方法解决实际中遇到的简单优化问题,提高分析、解决实际问题的能力;
三、教学手段及教学方法建议
主要教学手段:讲授法。
原则:多进行习题训练,利用课外辅导,课外作业及批改,提高学生解题能力、建模能力、应用能力。
四、考核方式和成绩评定
本课程是考查课,考试的形式为闭卷,达到学校规定的旷课量,则取消考试资格。
成绩评定:根据平时成绩与期末考试成绩评定,平时成绩占40%,期末成绩占60%。具
体考核方法按榆林学院数学系学生成绩考核细则执行,总评成绩60分为合格。
五、课程教材与主要参考书
教材:
施光燕、董加礼编,《最优化方法》(第一版),高等教育出版社,2006年。
主要参考书:
[1] 何坚勇编,《最优化方法》(第一版),清华大学出版社,2007年。
[2] 赖炎连、贺国平编,《最优化方法》(第一版),清华大学出版社,2008年。
六、教学环节及学时安排
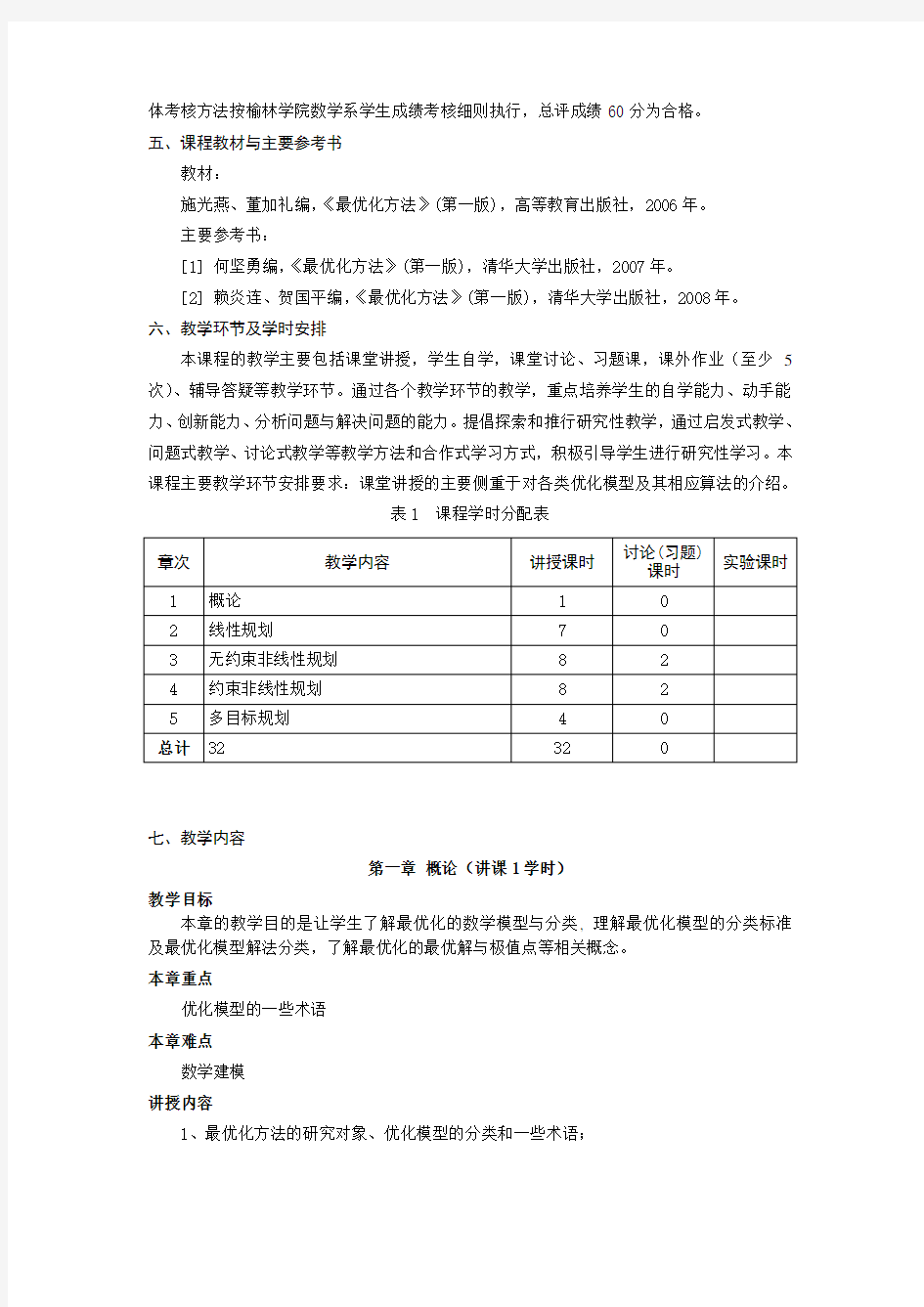
本课程的教学主要包括课堂讲授,学生自学,课堂讨论、习题课,课外作业(至少5次)、辅导答疑等教学环节。通过各个教学环节的教学,重点培养学生的自学能力、动手能力、创新能力、分析问题与解决问题的能力。提倡探索和推行研究性教学,通过启发式教学、问题式教学、讨论式教学等教学方法和合作式学习方式,积极引导学生进行研究性学习。本课程主要教学环节安排要求:课堂讲授的主要侧重于对各类优化模型及其相应算法的介绍。
表1 课程学时分配表
七、教学内容
第一章概论(讲课1学时)
教学目标
本章的教学目的是让学生了解最优化的数学模型与分类, 理解最优化模型的分类标准及最优化模型解法分类,了解最优化的最优解与极值点等相关概念。
本章重点
优化模型的一些术语
本章难点
数学建模
讲授内容
1、最优化方法的研究对象、优化模型的分类和一些术语;
第二章线性规划(讲课7学时)
教学目标
本章的教学目的是让学生理解线性规划解的几何特征,会用图解法求含两个决策变量的线性规划问题;会将线性规划模型化为标准形;理解线性规划的可行解、最优解、基、基本解、基本可行解等概念,掌握线性规划的基本定理;熟练掌握求线性规划的单纯形法;掌握求解线性规划的大M法;了解对偶线性规划。
本章重点
线性规划解的几何特征、线性规划的基本定理、单纯形法
本章难点
大M法、对偶线性规划
讲授内容
1、线性规划解的几何特征;
2、线性规划的标准形和基本定理;
3、单纯形法;
4、大M法、对偶单纯形法;
第三章无约束非线性规划(讲课8学时)
教学目标
本章的教学目的是让学生理解无约束非线性规划的最优性条件;掌握常见的一维搜索法;熟练掌握最速下降法、共轭梯度法、牛顿法,会用这些方法求解简单的无约束非线性规划问题;了解修正牛顿法和DFP算法。
本章重点
一维搜索法、最速下降法、共轭梯度法、牛顿法和拟牛顿法
本章难点
共轭梯度法、修正牛顿法和DFP算法
讲授内容
1、最优性条件、一维搜索法;
2、最速下降法和牛顿法;
3、修正牛顿法和DFP算法;
4、共轭梯度法;
第四章约束非线性规划(讲课8学时)
教学目标
本章的教学目的是让学生掌握约束非线性规划的最优性条件,会求非线性规划的K-T 点;理解可行方向的概念,掌握可行方向法的应用;熟练掌握惩罚函数法的思想和应用,包括外点法、内点法和乘子法;了解序列二次规划法的思想和求解过程。
本章重点
约束非线性规划的最优性条件、外点法、内点法
本章难点
可行方向法、序列二次规划法
讲授内容
1、约束非线性规划的最优性条件;
2、可行方向法;
3、惩罚函数法;
4、序列二次规划法
第五章多目标规划(讲课4学时)
教学目标
本章的教学目的是让学生了解多目标规划问题和偏差的概念;理解有效解和弱有效解的概念,会求绝对最优解集、有效解集、弱有效解集;理解求解多目标线性规划的各种方法(转化为一个单目标问题、分层排序法)。
本章重点
求解多目标线性规划的方法
本章难点
多目标规划解的概念
讲授内容
1、偏差概念的运用、多目标规划解的概念;
2、多目标线性规划的解法;
《最优化方法》复习题(含答案)
《最优化方法》复习题(含答案)
附录5 《最优化方法》复习题 1、设n n A R ?∈是对称矩阵,,n b R c R ∈∈,求1()2 T T f x x Ax b x c =++在任意点x 处的梯度和Hesse 矩阵. 解 2(),()f x Ax b f x A ?=+?=. 2、设()()t f x td ?=+,其中:n f R R →二阶可导,,,n n x R d R t R ∈∈∈,试求()t ?''. 解 2()(),()()T T t f x td d t d f x td d ??'''=?+=?+. 3、设方向n d R ∈是函数()f x 在点x 处的下降方向,令 ()()()()() T T T T dd f x f x H I d f x f x f x ??=--???, 其中I 为单位矩阵,证明方向()p H f x =-?也是函数()f x 在点x 处的下降方向. 证明 由于方向d 是函数()f x 在点x 处的下降方向,因此()0T f x d ?<,从而 ()()()T T f x p f x H f x ?=-?? ()()()()()()()() T T T T T dd f x f x f x I f x d f x f x f x ??=-?--???? ()()()0T T f x f x f x d =-??+?<, 所以,方向p 是函数()f x 在点x 处的下降方向. 4、n S R ?是凸集的充分必要条件是12122,,,,,,,,m m m x x x S x x x ?≥?∈L L 的一切凸组合都属于S . 证明 充分性显然.下证必要性.设S 是凸集,对m 用归纳法证明.当2m =时,由凸集的定义知结论成立,下面考虑1m k =+时的情形.令1 1k i i i x x λ+==∑, 其中,0,1,2,,1i i x S i k λ∈≥=+L ,且1 1 1k i i λ+==∑.不妨设11k λ+≠(不然1k x x S +=∈, 结论成立),记11 1k i i i k y x λλ=+=-∑ ,有111(1)k k k x y x λλ+++=-+,
最优化论文
厂址选择问题最优化论文 目录 摘要 (3) 1 问题重述 (4) 2 模型假设 (4) 3 模型的分析与建立 (4) 3.1模型分析与建立 (4) 4 模型的求解及结果分析 (6) 4.1问题的求解 (6) 4.2求解结果的分析 (7) 5模型优缺点分析 (7) 参考文献 (8) 附录 (8)
厂址选择问题 摘要 优化理论是一门实践性很强的学科,广泛应用于生产管理、军事指挥和科学试验等各种领域,Matlab优化工具箱提供了对各种优化问题的一个完整的解决方案。在应用于生产管理中时,为了使总的消费费用最小,常常需要解决一些厂址的选择问题。 对于该问题的厂址建设及规模分配,根据题意给出的一系列数据,可以建立数学模型,运用线性规划问题给出目标函数及约束条件,然后根据模型中的约束条件知,其中有等式约束和不等式约束,所以选用常用约束最优化方法中的外点罚函数来求解,因为外点罚函数是通过一系列惩罚因子{M k ,k=0,1,2, }, 求F(X,M k )的极小点来逼近原约束问题的最优点,当M k 趋于无穷大时,F(X,M k ) 的极小值点就是原问题的最优点X*。其中目标函数为F(X,M K )=f(X)+M K a(X),其 中 )) ( ( )] ( [ )] ( [ 1 2 1 2x g u x g x h i l i i m j j∑ ∑ = = + 给定终止限ε。根据外点罚的步骤及流 程图,编写出源程序,然后根据任意选取的初始点,并且罚因子及递增系数应取适当较大的值,从D外迭代点逼近D内最优解。 最后,根据外点罚函数的流程图,运用Matlab软件编写程序,求出最优解,即最优方案,使费用最小,并且也在规定的规模中。 关键字:Matlab 外点罚函数罚因子
浅谈最优控制
浅谈最优控制 发表时间:2008-12-10T10:25:09.263Z 来源:《黑龙江科技信息》供稿作者:李晶1 陈思2 [导读] 主要阐述了关于最优控制问题的基本概念,最优控制是最优化方法的一个应用。最优化一般可以分为最优设计、最优计划、最优管理和最优控制四个方面。 摘要:主要阐述了关于最优控制问题的基本概念,最优控制是最优化方法的一个应用。最优化一般可以分为最优设计、最优计划、最优管理和最优控制四个方面。而最优控制理论是研究和解决从一切可能的控制方案中寻找最优解的一门学科,解决最优控制问题的主要方法有古典变分法、极大值原理和动态规划。通过以上知识的讲解使初学者能够快速掌握最优控制的问题。关键词:最优化;最优控制;极值 最优控制是最优化方法的一个应用,如果想了解最优控制必须知道什么是最优化方法。所谓最优化方法为了达到最优化目的所提出的各种求解方法。从数学意义上说,最优化方法是一种求极值的方法,即在一组约束为等式或不等式的条件下,使系统的目标函数达到极值,即最大值或最小值。从经济意义上说,是在一定的人力、物力和财力资源条件下,使经济效果达到最大(如产值、利润),或者在完成规定的生产或经济任务下,使投入的人力、物力和财力等资源为最少。 最优化一般可以分为最优设计、最优计划、最优管理和最优控制四个方面。(1)最优设计:世界各国工程技术界,尤其是飞机、造船、机械、建筑等部门都已广泛应用最优化方法于设计中,从各种设计参数的优选到最佳结构形状的选取等,结合有限元方法已使许多设计优化问题得到解决。一个新的发展动向是最优设计和计算机辅助设计相结合。电子线路的最优设计是另一个应用最优化方法的重要领域,它存在着巨大的开发潜力,尤其是对于学电工学的学生来说。配方配比的优选方面在化工、橡胶、塑料等工业部门都得到成功的应用,并向计算机辅助搜索最佳配方、配比方向发展。(2)最优计划:现代国民经济或部门经济的计划,直至企业的发展规划和年度生产计划,尤其是农业规划、种植计划、能源规划和其他资源、环境和生态规划的制订,都已开始应用最优化方法。一个重要的发展趋势是帮助领导部门进行各种优化决策,使工作结构简单,工作效率最高化,节省了很多时间。(3)最优管理:一般在日常生产计划的制订、调度和运行中都可应用最优化方法。随着管理信息系统和决策支持系统的建立和使用,使最优管理得到迅速的发展。(4)最优控制:主要用于对各种控制系统的优化。下面着重来解释一下最优控制。 最优控制理论是研究和解决从一切可能的控制方案中寻找最优解的一门学科。它是现代控制理论的重要组成部分。这方面的开创性工作主要是由贝尔曼(R.E.Bellman)提出的动态规划和庞特里亚金等人提出的最大值原理。这方面的先期工作应该追溯到维纳(N.Wiener)等人奠基的控制论(Cybernetics)。1948年维纳发表了题为《控制论——关于动物和机器中控制与通讯的科学》的论文,第一次科学的提出了信息、反馈和控制的概念,为最优控制理论的诞生和发展奠定了基础。钱学森1954年所著的《工程控制论》(EngineeringCybernetics)直接促进了最优控制理论的发展和形成。 为了解决最优控制问题,必须建立描述受控运动过程的运动方程,即系统的数学模型,给出控制变量的允许取值范围,指定运动过程的初始状态和目标状态,并且规定一个评价运动过程品质优劣的性能指标。通常,性能指标的好坏取决于所选择的控制函数和相应的运动状态。系统的运动状态受到运动方程的约束,而控制函数只能在允许的范围内选取。因此,从数学上看,确定最优控制问题可以表述为:在运动方程和允许控制范围的约束下,对以控制函数和运动状态为变量的性能指标函数(称为泛函)求取极值(极大值或极小值)。解决最优控制问题的主要方法有古典变分法、极大值原理和动态规划。 1 古典变分法 研究对泛函求极值的一种数学方法。古典变分法只能用在控制变量的取值范围不受限制的情况。在许多实际控制问题中,控制函数的取值常常受到封闭性的边界限制,如方向舵只能在两个极限值范围内转动,电动机的力矩只能在正负的最大值范围内产生等。因此,古典变分法对于解决许多重要的实际最优控制问题,是无能为力的。 2 极大值原理 极大值原理,是分析力学中哈密顿方法的推广。极大值原理的突出优点是可用于控制变量受限制的情况,能给出问题中最优控制所必须满足的条件。 3 动态规划 动态规划是数学规划的一种,同样可用于控制变量受限制的情况,是一种很适合于在计算机上进行计算的比较有效的方法。随着社会科技的不断进步,最优控制理的应用领域十分广泛,如时间最短、能耗最小、线性二次型指标最优、跟踪问题、调节问题和伺服机构问题等。但它在理论上还有不完善的地方,其中两个重要的问题就是优化算法中的鲁棒性问题和最优化算法的简化和实用性问题。大体上说,在最优化理论研究和应用方面应加强的课题主要有:(1)适合于解决工程上普遍问题的稳定性最优化方法的研究;(2)智能最优化方法、最优模糊控制器设计的研究;(3)简单实用的优化集成芯片及最优化控制器的开发和推广利用;(4)复杂系统、模糊动态模型的辩识与优化方法的研究;(5)最优化算法的改进。相信随着对这些问题的研究和探索的不断深入,最优控制技术将越来越成熟和实用,它也将给人们带来不可限量的影响。 参考文献 [1]胡寿松.最优控制理论与系统[M].(第二版)北京:科学出版社,2005. [2]阳明盛.最优化原理、方法及求解软件[M].北京:科学出版社,2006. [3]葛宝明.先进控制理论及其应用[M].北京:机械工业出版社,2007. [4]章卫国.先进控制理论与方法导论[M].西安:西北工业大学出版社,2000.
最优化论文
理学院 最优化理论与应用 课程设计 学号:XXXXXXX 专业:应用数学 学生姓名:XXXXXX 任课教师:XXXXXX教授 2015年10月
第一部分 在最优化理论与应用这门课中,我对求指派问题及指派问题的一个很好的解法匈牙利算法的应用比较感应趣。下面做出来讨论。 国内外的研究情况:“匈牙利算法”最早是由匈牙利数学家尼格(D.Koning )用来求矩阵中0元素个数的一种方法 ] 3[,由此他证明了“矩阵中独立0元素的最 多个数等于能覆盖所有0元素的最小直线数”。1955年由库恩(W.W.Kuhn )在求解著名的指派问题时引用了这一结论 ] 4[,并对具体算法做了改进,任然称为“匈 牙利算法”。解指派问题的匈牙利算法是从这样一个明显事实出发的:如果效率矩阵的所有元素 ≥ij a ,而其中存在一组位于不同行不同列的零元素,而只要令 对应于这些零元素位置的1 =ij x ,其余的 =ij x ,则z= ∑∑n i n j ij ij x a 就是问题的最 优解。 第二部分 结合我的基础知识对匈牙利算法的分析与展望 一.基础知识运用 企业员工指派问题的模型建立与求解 1.标准指派问题(当m=n 时,即为每个人都被指派一项任务) 假定某企业有甲乙丙丁戊五个员工,需要在一定的生产技术组织条件下,A ,B,C,D,E 五项任务,每个员工完成每项工作所需要耗费的工作时间如下: 求出:员工与任务之间应如何分配,才能保证完成工作任务的时间最短?最短时间为多少? 模型建立 设用C>0表示指派第i 个人去完成第j 项任务所用费时间,定义决策变量 , {j i ,1j i ,0项任务 个人去完成第当指派第项任务个人去完成第当不指派第=ij χ则指派问题的数学模型为:
最优化方法试题
《最优化方法》试题 一、 填空题 1.设()f x 是凸集n S R ?上的一阶可微函数,则()f x 是S 上的凸函数的一阶充要条件是( ),当n=2时,该充要条件的几何意义是( ); 2.设()f x 是凸集n R 上的二阶可微函数,则()f x 是n R 上的严格凸函数( )(填‘当’或‘当且仅当’)对任意n x R ∈,2()f x ?是 ( )矩阵; 3.已知规划问题22211212121212min 23..255,0z x x x x x x s t x x x x x x ?=+---?--≥-??--≥-≥?,则在点55(,)66T x =处的可行方向集为( ),下降方向集为( )。 二、选择题 1.给定问题222121212min (2)..00f x x s t x x x x ?=-+??-+≤??-≤?? ,则下列各点属于K-T 点的是( ) A) (0,0)T B) (1,1)T C) 1(,22 T D) 11(,)22T 2.下列函数中属于严格凸函数的是( ) A) 211212()2105f x x x x x x =+-+ B) 23122()(0)f x x x x =-< C) 2 222112313()226f x x x x x x x x =+++- D) 123()346f x x x x =+- 三、求下列问题
()22121212121211min 51022 ..2330420 ,0 f x x x x x s t x x x x x x =+---≤+≤≥ 取初始点()0,5T 。 四、考虑约束优化问题 ()221212min 4..3413f x x x s t x x =++≥ 用两种惩罚函数法求解。 五.用牛顿法求解二次函数 222123123123()()()()f x x x x x x x x x x =-++-++++- 的极小值。初始点011,1,22T x ??= ???。 六、证明题 1.对无约束凸规划问题1min ()2 T T f x x Qx c x =+,设从点n x R ∈出发,沿方向n d R ∈ 作最优一维搜索,得到步长t 和新的点y x td =+ ,试证当1T d Q d = 时, 22[() ()]t f x f y =-。 2.设12*** *3(,,)0T x x x x =>是非线性规划问题()112344423min 23..10f x x x x s t x x x =++++=的最优解,试证*x 也 是非线性规划问题 144423* 123min ..23x x x s t x x x f ++++=的最优解,其中****12323f x x x =++。
最优化方法课程设计-斐波那契法分析与实现-完整版(新)
所谓的光辉岁月,并不是以后,闪耀的日子,而是无人问津时,你对梦想的偏执。 最优化方法 题目:斐波那契法分析与实现 院系:信息与计算科学学院 专业:统计学 姓名学号:小熊熊 11071050137 指导教师:大胖胖 日期: 2014 年 01 月 10 日
摘要 科学的数学化是当代科学发展的一个主要趋势,最优化理论与算法是一个重要的数学分支,它所研究的问题是讨论在众多的方案中什么样的方案最优以及怎样找出最优方案. 一维搜索是指寻求一元函数在某个区间上的最优点的方法.这类方法不仅有实用价值,而且大量多维最优化方法都依赖于一系列的一维最优化.本文就斐波那契法的一维搜索进行了详细的分析,并且成功的用 MATLAB 实现了斐波那契法求解单峰函数的极小值问题. 斐波那契法的一维搜索过程是建立在一个被称为斐波那契数列的基础上进行的,斐波那契法成功地实现了单峰函数极值范围的缩减.从理论上来说,斐波那契法的精度比黄金分割法要高.但由于斐波那契法要事先知道计算函数值的次数,故相比之下,黄金分割法更为简单一点,它不需要事先知道计算次数,并且当n 7 时,黄金分割法的收敛速率与斐波那契法越来越接近.因此,在实际应用中,常常采用黄金分割法. 斐波那契法也是一种区间收缩算法,和黄金分割法不同的是:黄金分割法每次收缩只改变搜索区间的一个端点,即它是单向收缩法. 而斐波那契法同时改变搜索区间的两个端点,是一种双向收缩法. 关键字:一维搜索斐波那契法单峰函数黄金分割法MATLAB
Abstract Mathematical sciences is a major trend in contemporary scientific development, optimization theory and algorithms is an important branch of mathematics, the problems it was discussed in numerous research programs in the best of what programs and how to find the optimal solution . One-dimensional search is the best method of seeking functions of one variable on the merits of a certain interval. Such methods not only have practical value, but also a large number of multi-dimensional optimization methods rely on a series of one-dimensional optimization article on Fibonacci the one-dimensional search method carried out a detailed analysis, and successful in MATLAB Fibonacci method for solving unimodal function minimization problem. Fibonacci method of one-dimensional search process is based on the Fibonacci sequence is called a Fibonacci conducted on, Fibonacci method successfully achieved a unimodal function extreme range reduction. Theory , Fibonacci method accuracy is higher than the golden section method, but the number of times due to the Fibonacci method to calculate function values to know in advance, so the contrast, the golden section method is more simply, it does not need to know in advance the number of calculations and at that time, the rate of convergence of golden section and the Fibonacci method getting closer, so in practical applications, often using the golden section method. Fibonacci method is also a range contraction algorithm, and the golden section method the difference is: golden section each contraction only one endpoint to change the search range that it is unidirectional shrinkage law Fibonacci search method while changing the two endpoints of the range, is a two-way contraction method. Key words: one-dimensional search Fibonacci method unimodal function Golden Section function MATLAB
天津大学《最优化方法》复习题(含答案)
天津大学《最优化方法》复习题(含答案) 第一章 概述(包括凸规划) 一、 判断与填空题 1 )].([arg )(arg min max x f x f n n R x R x -=∈∈ √ 2 {}{} .:)(m in :)(m ax n n R D x x f R D x x f ?∈-=?∈ ? 3 设.:R R D f n →? 若n R x ∈*,对于一切n R x ∈恒有)()(x f x f ≤*,则称*x 为最优化问题)(min x f D x ∈的全局最优解. ? 4 设.:R R D f n →? 若D x ∈*,存在*x 的某邻域)(*x N ε,使得对一切)(*∈x N x ε恒有)()(x f x f <*,则称*x 为最优化问题)(min x f D x ∈的 严格局部最优解. ? 5 给定一个最优化问题,那么它的最优值是一个定值. √ 6 非空集合n R D ?为凸集当且仅当D 中任意两点连线段上任一点属于D . √ 7 非空集合n R D ?为凸集当且仅当D 中任意有限个点的凸组合仍
属于D . √ 8 任意两个凸集的并集为凸集. ? 9 函数R R D f n →?:为凸集D 上的凸函数当且仅当f -为D 上的凹函数. √ 10 设R R D f n →?:为凸集D 上的可微凸函数,D x ∈*. 则对D x ∈?,有).()()()(***-?≤-x x x f x f x f T ? 11 若)(x c 是凹函数,则}0)( {≥∈=x c R x D n 是凸集。 √ 12 设{}k x 为由求解)(min x f D x ∈的算法A 产生的迭代序列,假设算法 A 为下降算法,则对{} ,2,1,0∈?k ,恒有 )()(1k k x f x f ≤+ . 13 算法迭代时的终止准则(写出三种):_____________________________________。 14 凸规划的全体极小点组成的集合是凸集。 √ 15 函数R R D f n →?:在点k x 沿着迭代方向}0{\n k R d ∈进行精确一维线搜索的步长k α,则其搜索公式
最优化理论与方法论文(DOC)(新)
优化理论与方法
全局及个性化web服务组合可信度的动态规划评估方法 摘要:随着Internet的快速发展,web服务作为一种软件构造形式其应用越来越广泛。单个web服务无法满足日益复杂的用户需求,web服务组合有效地解决了这个问题。然而,随着功能相似的web服务实例的不断出现,如何选择可信的web服务组合成为了人们关注的热点。服务选择依赖于web服务组合的评估结果,因此,本文主要从web服务组合着手,对其可信性进行研究,提供一种可信web服务组合评估方法。:针对web服务组合的全局及个性化问题,提出了基于全局的个性化web服务组合可信评估方法。从全局角度动态地调整评估模型;同时引入用户业务关注度来描述原子web服务对服务组合可信性的影响程度;结合前文的度量及评估方法,构建一个全局的个性化服务组合可信评估模型;并分析了模型的相关应用,给出了改进的动态规划模型。 关键字:web服务组合可信评价;全局个性化;动态规划; 0.引言 随着软件系统规模的日趋复杂,运行环境的不断开放,软件的可信性要求日益增加,可信软件成为了研究的热点。据《中国互联网发展状况统计报告》统计显示,截至2014年12月底,我国网民数量突破8亿,全年新增网民5580万。互联网普及率较上年底提升4个百分点,达到38。3%。因此,随着Internet 的广泛应用和网络技术的快速发展,面向服务的软件体系结构(SOA)作为一种新型的网络化软件应用模式已经被工业界和学术界广为接受。同时,网民对互联网电子商务类应用稳步发展,网络购物、网上支付、网上银行和在线旅游预订等应用的用户规模全面增长。因而,对web服务的可信性要求更高。单个web服务的功能有限,往往难以满足复杂的业务需求,只有通过对已有web服务进行组合,才能真正发挥其潜力。在现有的web服务基础上,通过服务组装或者Mashup方式生成新web服务作为一种新型的软件构造方式,已成为近年的研究热点之一。web服务组合并不是多个原子web服务的简单累加,各原子web服务之间有着较强的联系。因此对web服务组合的可信需求更高。目前大量的研究工作着重于如何实现原子web服务间的有效组合,对服务组合的可信评估研究较少。如今,随着web服务资源快速发展,出现了大量功能相同或相似的web服务,对web服务组合而言,选择可信的web服务变得越来越难。在大量的功能相似的原子web服务中,如何选出一组可信的web服务组合,成为了人们关注的热点问题。本文将从web服务组合着手,对其可信性进行研究,旨在提供一种可信web服务组合评估方法,为web服务组合的选择提供依据。web服务组合的可信度主要包括以下三个部分: 1)基于领域本体的web服务可信度量模型。 2)基于偏好推荐的原子web服务可信评估方法。 3)基于全局的个性化web服务组合可信评估方法。 研究思路: 本文主要研究基于全局的个性化web服务组合的可信评估方法,其研究思路可以大致如下:基于领域本体的web服务可信度和基于偏好推荐的原子web 服务可信评估方法。针对web服务组合的四种基本组合结构模式,主要研究如
(完整版)机械优化设计试卷期末考试及答案
第一、填空题 1.组成优化设计的数学模型的三要素是 设计变量 、目标函数 和 约束条件 。 2.可靠性定量要求的制定,即对定量描述产品可靠性的 参数的选择 及其 指标的确定 。 3.多数产品的故障率随时间的变化规律,都要经过浴盆曲线的 早期故障阶段 、 偶然故障阶段 和 耗损故障阶段 。 4.各种产品的可靠度函数曲线随时间的增加都呈 下降趋势 。 5.建立优化设计数学模型的基本原则是在准确反映 工程实际问题 的基础上力求简洁 。 6.系统的可靠性模型主要包括 串联模型 、 并联模型 、 混联模型 、 储备模型 、 复杂系统模型 等可靠性模型。 7. 函数f(x 1,x 2)=2x 12 +3x 22-4x 1x 2+7在X 0=[2 3]T 点处的梯度为 ,Hession 矩阵为 。 (2.)函数()22121212,45f x x x x x x =+-+在024X ??=????点处的梯度为120-?? ????,海赛矩阵为2442-???? -?? 8.传统机械设计是 确定设计 ;机械可靠性设计则为 概率设计 。 9.串联系统的可靠度将因其组成单元数的增加而 降低 ,且其值要比可靠 度 最低 的那个单元的可靠度还低。 10.与电子产品相比,机械产品的失效主要是 耗损型失效 。 11. 机械可靠性设计 揭示了概率设计的本质。 12. 二元函数在某点处取得极值的充分条件是()00f X ?=必要条件是该点处的海赛矩阵正定。 13.对数正态分布常用于零件的 寿命疲劳强度 等情况。 14.加工尺寸、各种误差、材料的强度、磨损寿命都近似服从 正态分布 。 15.数学规划法的迭代公式是 1k k k k X X d α+=+ ,其核心是 建立搜索方向, 模型求解 两方面的内容。 17.无约束优化问题的关键是 确定搜索方向 。 18.多目标优化问题只有当求得的解是 非劣解 时才有意义,而绝对最优解存在的可能性很小。 19.可靠性设计中的设计变量应具有统计特征,因而认为设计手册中给出的数据
最优化计算方法课后习题答案----高等教育出版社。施光燕
习题二包括题目:P36页5(1)(4) 5(4)
习题三 包括题目:P61页1(1)(2); 3; 5; 6; 14;15(1) 1(1)(2)的解如下 3题的解如下
5,6题 14题解如下 14. 设22121212()(6)(233)f x x x x x x x =+++---, 求点在(4,6)T -处的牛顿方向。 解:已知 (1) (4,6)T x =-,由题意得 121212212121212(6)2(233)(3)()2(6)2(233)(3)x x x x x x x f x x x x x x x x +++-----?? ?= ?+++-----?? ∴ (1)1344()56g f x -?? =?= ??? 21212122211212122(3)22(3)(3)2(233)()22(3)(3)2(233)22(3)x x x x x x x f x x x x x x x x +--+--------? ??= ? +--------+--?? ∴ (1)2(1)1656()()564G x f x --?? =?= ?-?? (1)1 1/8007/400()7/4001/200G x --?? = ?--?? ∴ (1)(1)11141/100()574/100d G x g -?? =-= ?-?? 15(1)解如下 15. 用DFP 方法求下列问题的极小点 (1)22 121212min 353x x x x x x ++++ 解:取 (0) (1,1)T x =,0H I =时,DFP 法的第一步与最速下降法相同 2112352()156x x f x x x ++???= ?++??, (0)(1,1)T x =,(0) 10()12f x ???= ??? (1)0.07800.2936x -??= ?-??, (1) 1.3760() 1.1516f x ???= ?-?? 以下作第二次迭代 (1)(0) 1 1.07801.2936x x δ-??=-= ?-??, (1)(0) 18.6240()()13.1516f x f x γ-??=?-?= ?-?? 0110 111011101 T T T T H H H H H γγδδδγγγ=+-
最优化方法与最优控制复习文件
最优化方法与最优控制复习文件 1. 非线性优化的基本概念,最优解的一阶和二阶条件,最速下降方法,拟牛顿法情况,BFGS 修正。 2. 变分问题的最优必要性条件推导,各种情况下的必要性条件,Hamilton 函数、拉格让日 函数。PPT 中讲到的最优控制实例,包括求解过程需要掌握。 3. 极大值原理搞清楚,以及PPT 中的计算实例。 4. 动态规划,原理和简单的求解技术。 5. LQR 问题也要看一下。 除此之外,还有几个作业题目大家做一下,如下所示: 1. 非线性优化中,从直观考虑最速下降法是一种最快速的迭代优化方法,实际过程中为什 么不理想?为什么采用二阶方法?二阶方法中的二阶导数矩阵怎么得到的?有什么要求? (15分) 2. 对于函数形式为 的优化问题,若采用最速下降法求解,请给出最优搜索方向p k 的表达式。变量初值为X0=[1,1,1]T ,请写出第一步迭代过程,以及得到的X1的关于搜索步长α0表达式,在这种情况下,使得))0()0((F 0p x α+最小的搜索步长α0应该等于多少?(15分) 3. 题目要求如下,采用动态规划方法寻求从A 点到B 点的最小时间路径(A 到B 仅能向前 走),(20分) 4. 对于以下简单的标量非线性系统,请通过求解相关HJB 方程得到其最优反馈控制策略。 提示,HJB 微分方程允许如此形式的解。
5.写出如下优化控制问题的Hamiltonian 函数、优化求解的必须性条件,并通过必要性条 件的求解计算出该优化控制和状态轨线。最小化目标函数 6.根据你对优化控制求解方法的了解,目前对于优化控制问题(或者成为动态优化问题, DAOPs问题)有哪些求解方法, 7.
《最优化方法》复习题(含答案)
x zD 天津大学《最优化方法》复习题(含答案) 第一章 概述(包括凸规划) 判断与填空题 arg max f(x)二 arg min 以儿 “ max(x): x D 二 R n 』=-min(x): x D 二 R n ; 设f : D 5 R n > R.若x : R n ,对于一切R n 恒有f(x”)^f(x),则称x”为 设f : D 5 R n >R.若x ” ? D ,存在x ”的某邻域N ;(x”),使得对一切 x ?N .(x)恒有f(x”)::: f (x),则称x”为最优化问题 min f (x)的严格局部最 优解? 给定一个最优化问题,那么它的最优值是一个定值 ? V 非空集合D R n 为凸集当且仅当 D 中任意两点连线段上任一点属于 D . V 非空集合D R n 为凸集当且仅当D 中任意有限个点的凸组合仍属于 D . V 任意两个凸集的并集为凸集? 函数f:D R n >R 为凸集D 上的凸函数当且仅当 -f 为D 上的凹函数? V 设f : D R n >R 为凸集D 上的可微凸函数,X :D ?则对-D ,有 f (x) - f(x )乞 f (x )T (X —X )? 若c(x)是凹函数,则 D={x^R n C(x)启0}是凸集。 V f(x)的算法A 产生的迭代序列,假设算法 A 为下降算法, 则对-k ? 5,1, 2,…匚恒有 ________________ f(x k1)乞 f(x k ) ______________ ? 算法迭代时的终止准则(写出三种) : ___________________________________________________ 凸规划的全体极小点组成的集合是凸集。 V 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16
最优化论文
题目:非线性最小二乘法问题的一种解法--高斯-牛顿法 学生姓名:聂倩云 学号:113113001039 学院:理学院 专业名称:应用数学
非线性最小二乘法问题的一种解法--高斯-牛顿法 目录 前言 (1) 1. 拟牛顿法及相关讨论 (1) 2.牛顿法 (1) 3.拟牛顿法 (2) 3.1DFP公式 (2) 3.2BFGS公式 (4) 3.3限域拟牛顿法 (6) 4.针对二次非凸性函数的若干变形 (6) 参考文献: (7)
非线性最小二乘法问题一种解法--高斯-牛顿法 学生:聂倩云 学号:113113001039 摘 要:非线性最小二乘法问题在工程技术、测绘等各个领域有着非常广泛的应用,我们考虑无约束非线性最小二乘问题的一种常见的解法:高斯-牛顿法。求解无约束优化问题的基本方法是牛顿法,本文从这点出发,介绍此方法步骤,探讨此方法的收敛性,讨论它的收敛速度,并给出高斯-牛顿法的一种修正:阻尼高斯牛顿法。 关键词:非线性最小二乘;高斯-牛顿法;收敛性;收敛速度 前言 非线性最小二乘问题结构特殊,不仅可以用一般的最优化问题求解的方法,还可以对一般的无约束优化问题求解方法进行改造,得到一些特殊的求解方法。而这些方法基本思想就是形成对目标函数的海森矩阵不同的近似。 1.非线性最小二乘法问题概述 非线性最小二乘法模型为 ()()[]()()()22 12 12121m in x r x r x r x r x f T m i i ===∑= 其一阶、二阶导数分别为 ()()()x r x A x g = ()()()()()()()x S x M x r x r x A x A x G m i i i T +=?+=∑=12 其中()()()()()T m x r x r x r x r ,,,21 =称为在点x 处的残向量,()x r i 为非线性函 数,且 ()()()[]x r x r x A m ??=,,1 ,其中()()() T x A x A x M =称为高斯-牛顿 矩阵,为()x G 中的线性项,()x S 为()x G 中的非线性项。 2.高斯-牛顿法 高斯-牛顿法主要思想是省略非线性项()x S 从而形成对海森矩阵的近似。
优化理论和最优控制
分数: ___________ 任课教师签字:___________ 华北电力大学研究生结课作业 学年学期:2013-2014第二学期 课程名称:优化理论和最优控制 学生姓名: 学号: 提交时间:2014年4月26日
《优化理论和最优控制》结课总结 摘要:最优控制理论是现代控制理论的核心,控制理论的发展来源于控制对象的要求。尽50年来,科学技术的迅速发展,对许多被控对象,如宇宙飞船、导弹、卫星、和现代工业设备的生产过程等的性能提出了更高的要求,在许多情况下要求系统的某种性能指标为最优。这就要求人们对控制问题都必须从最优控制的角度去进行研究分析和设计。最优控制理论研究的主要问题是:根据已建立的被控对象的时域数学模型或频域数学模型,选择一个容许的控制律,使得被控对象按预定要求运行,并使某一性能指标达到最优值[1]。 关键字:最优控制理论,现代控制理论,时域数学模型,频域数学模型,控制率 Abstract: The Optimal Control Theory is the core of the Modern Control Theory,the development of control theory comes from the requires of the controlled objects.During the 50 years, the rapid development of the scientific technology puts more stricter requires forward to mang controlled objects,such as the spacecraft,the guide missile,the satellite,the productive process of modern industrial facilities,and so on,and requests some performance indexes that will be best in mang cases.To the control problem,it requests people to research ,analyse,and devise from the point of view of the Optimal Control Theory. There are mang major problems of the Optimal Control Theory studying,such as the building the time domain’s model or the frenquency domain’s model according to the controlled objects,controlling a control law with admitting, making the controlled objects to work according to the scheduled requires, and making the performance index to reseach to a best optimal value. Keywords: The Optimal Control Theroy, The Modern Control Theroy, The
修订过的最优化方法复习题
《最优化方法》复习题 第一章 引论 一、 判断与填空题 1 )].([arg )(arg m in m ax x f x f n n R x R x -=∈∈ √ 2 {}{}.:)(min :)(max n n R D x x f R D x x f ?∈-=?∈ ? 3 设.:R R D f n →? 若n R x ∈*,对于一切n R x ∈恒有)()(x f x f ≤*,则称*x 为最优化问题 )(min x f D x ∈的全局最优解. ? 4 设.:R R D f n →? 若D x ∈*,存在*x 的某邻域)(*x N ε,使得对一切)(*∈x N x ε恒有)()(x f x f <*,则称*x 为最优化问题)(min x f D x ∈的严格局部最 优解. ? 5 给定一个最优化问题,那么它的最优值是一个定值. √ 6 非空集合n R D ?为凸集当且仅当D 中任意两点连线段上任一点属于D . √ 7 非空集合n R D ?为凸集当且仅当D 中任意有限个点的凸组合仍属于D . √ 8 任意两个凸集的并集为凸集. ? 9 函数R R D f n →?:为凸集D 上的凸函数当且仅当f -为D 上的凹函数. √ 10 设R R D f n →?:为凸集D 上的可微凸函数,D x ∈*. 则对D x ∈?,有).()()()(***-?≤-x x x f x f x f T ? 11 若)(x c 是凹函数,则}0)( {≥∈=x c R x D n 是凸集。 √ 12 设{}k x 为由求解)(min x f D x ∈的算法A 产生的迭代序列,假设算法A 为单调下降算 法,则对{} ,2,1,0∈?k ,恒有 )()(1k k x f x f ≤+ .
最优化方法(试题+答案)
一、 填空题 1 . 若 ()()??? ? ??+???? ?????? ??=212121 312112)(x x x x x x x f ,则 =?)(x f ,=?)(2x f . 2.设f 连续可微且0)(≠?x f ,若向量d 满足 ,则它是f 在x 处的一个下降方向。 3.向量T ) 3,2,1(关于3阶单位方阵的所有线性无关的共轭向量 有 . 4. 设R R f n →:二次可微,则f 在x 处的牛顿方向为 . 5.举出一个具有二次终止性的无约束二次规划算 法: . 6.以下约束优化问题: )(01)(..)(min 212121 ≥-==+-==x x x g x x x h t s x x f 的K-K-T 条件为: . 7.以下约束优化问题: 1 ..)(min 212 2 21=++=x x t s x x x f 的外点罚函数为(取罚参数为μ) . 二、证明题(7分+8分) 1.设1,2,1,:m i R R g n i =→和m m i R R h n i ,1,:1+=→都是线性函数,证明下 面的约束问题: } ,,1{, 0)(},1{, 0)(..)(min 1112 m m E j x h m I i x g t s x x f j i n k k +=∈==∈≥=∑= 是凸规划问题。
2.设R R f →2 :连续可微,n i R a ∈,R h i ∈,m i ,2,1=,考察如下的约束条件问题: } ,1{,0} 2,1{,0..) (min 11m m E i b x a m I i b x a t s x f i T i i T i +=∈=-=∈≥- 设d 是问题 1 ||||,0,0..)(min ≤∈=∈≥?d E i d a I i d a t s d x f T i T i T 的解,求证:d 是f 在x 处的一个可行方向。 三、计算题(每小题12分) 1.取初始点T x )1,1() 0(=.采用精确线性搜索的最速下降法求解下面的无约束优化问题 (迭代2步): 2 2212)(m in x x x f += 2.采用精确搜索的BFGS 算法求解下面的无约束问题: 212 2212 1)(min x x x x x f -+= 3.用有效集法求解下面的二次规划问题: . 0,001..42)(min 21212 12 221≥≥≥+----+=x x x x t s x x x x x f 4.用可行方向算法(Zoutend ij k算法或Frank Wol fe算法)求解下面的问题(初值设为)0,0() 0(=x ,计算到)2(x 即可): . 0,033..22 1)(min 212112 22121≥≥≤+-+-= x x x x t s x x x x x x f