基于ObjectARX的图块变换的应用

动态结构图
一、 动态结构图的概念 1、动态结构图是根据系统的物理原理和信号传递关系,将每个框图信号一一连接所形成的数学图形。 2、它可以系统地、直观地表示自动控制系统信息传递的过程。 二、动态结构图的符号 动态结构图有四个基本单元,分别为信号线、比较点、引出点和方框(环节)。 下面分别介绍如下: 1、信号线:是带有箭头的直线,箭头表示信号传递的方向。如下图所示: 2、比较点:比较点也称为综合点,它可对两个以上的信号进行加减运算,“+”表示相加, “-”表示相减。通常加号省略不写。如下图所示: 3、引出点:亦称为测量点,表示信号的引出位置。引出点只能进行信号传递,不能进行能量传递。 4、方框(环节):方框环节表示对信号进行的数学变换, 方框中写入元、部件或系统的传递函数。方框的输出变量就等于方框的输入变量与方框中传递函数的乘积。 三、动态结构图的绘制步骤 例2-3如图RC 电路,画出系统的动态结构图。 解:(1)列写微分方程式。 1、按系统结构分解各环节,确定各元件的输入、输出量。 2、绘出各环节结构图,标出系统传递函数G (S ) ,并以箭头字母表示输入和输出。 电阻R : 电容R : C(s) C(s)C(s) G(s)R(s)C(s) R(s)E(s)B(s) R(s)Cs s I s Uc dt du C i s I R s Uc s Ur s Uc s RI s Ur u Ri u c c r 1)()(·)() ()() ()()(·? =?==-?+=?+=拉氏变换拉氏变换u r (t)C u c (t) i R I(s)I(s)I(s)R L C ) (1s I cs Uc =)(s CLI U L =IR U R =11R )(s I )(s U r Cs 1)(s I )(s U C
(完整word版)结构图等效变换规则
结构图等效变换 1.环节串联: R s G s G R s G U U s G C ??=?=↓?=)()()()(1212 2.环节并联 []R s G s G R s G R s G R s G U R s G U U U C ?±=±=?=↓?=↓±=)()()()()()(212122112 1 3.反馈连接 C s H s G R s G C C s H R B R E E s G C ?±?=?±=±=↓?=)()()()()( []R s G C s H s G ?=)()()(1μ ) ()(1) ()()()(s H s G s G s R s C s μ== Φ
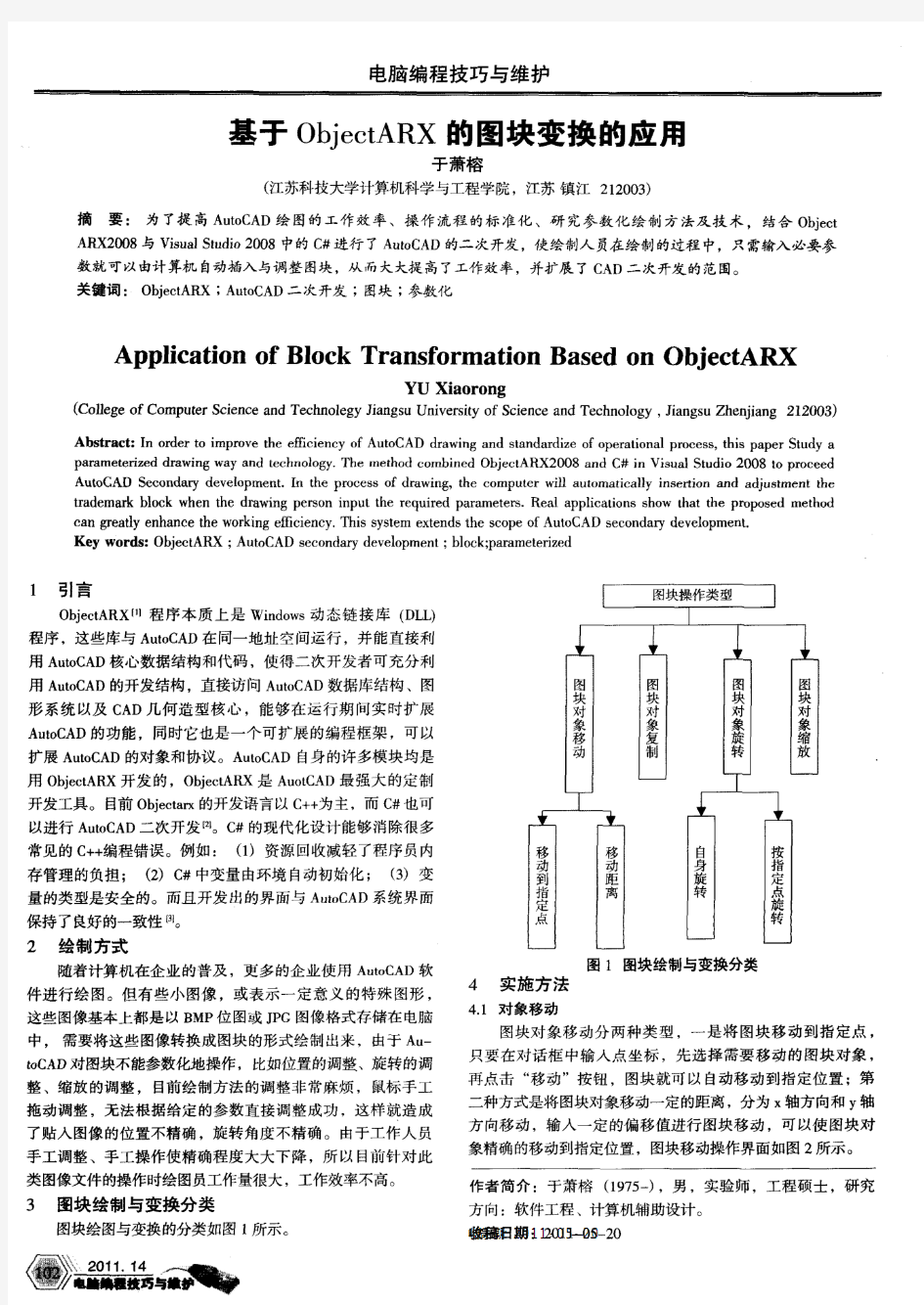
变换 方式 原方框图 等效方框图 等效运算关系 串联 )()()()(21s R s G s G s C = 并联 ) ()]()([)(21s R s G s G s C ±= 反馈 ()() ()1()() G s R s C s G s H s = m 比较点前移 ) (])()()([) ()()()(s G s G s Q s R s Q s G s R s C ±=±= 比较点 后移 ) ()()()() ()]()([)(s G s Q s G s R s G s Q s R s C ±=±= 引出点前移 )()()(s R s G s C = 引出点后移 ) ()()()(1) ()()(s R s G s C s G s G s R s R == 比较点之间的移动 123()()()()C s R s R s R s =±± 引出点之间的移动 12()()()()C s C s C s R s === 比较点与引出点之间的移动 )()()(21s R s R s C -=
2-3 方框图的等效变换
§2-3 方块图的等效变换 物理系统的动态特性也可以用方块图表示。利用这种方块图,能方便地对环节或系统进行研究。另外,通过方块图的变换,可以方便地用图解法消去中间变量得出物理系统总的传递函数。 自动控制系统的方块图一般包含四种基本单元。 (l )函数方块 它表示系统中某一环节或元件的动态特性。方块中所写的便是这个环节或元件的传递函数)(s G 或)(s H (如图2-13 ( b )所示)。它表示对信号进行数学变换。显然,函数方块的输出变量等于该方块输人变量与传递函数的乘积。即 )()()(0s X s G s X e =; )()()(0s X s H s X f =。 (2)信号线 带箭头的直线,箭头表示信 号的传递方向,线上标有信号的时间函数或象函数。 (3)分支点(又称引出点或测量点) 图上的“O ”点表示信号引出或测量的位置。同一位置引出的信号在数值和性质方面完全相同。 (4)汇合点(又称比较点) 对两个以上信号进行代数运算。‘ + 示。 任何复杂系统都是由许多元件组成的。每一个元件的传递函数可以独立确定,因而每个元件在系统中可作为一个单向性的方块来表示,而整个控制系统的方块图可按照系统中信号传递程序,用信号线依次将各方块连接而成。 系统方块图实质上已将原理图与数学模型结合起来,因而方块图也是系统的一种数学模型,它可以对系统进行全面的描述。利用各元件方块组成的系统方块图,通过等效变换后,可 图2-13 自动控制系统方块图 O ( a ) (b ) 图2-14 环节串联方框图
简化为一个等效方块图,从而求得系统的传递函数。 1.串联方块的等效 图2-14(a )所示的传递函数为 (s)G 1和(s)G 2两个方块,若(s)G 1的输出量作为(s)G 2的输人量,则(s)G 1和(s)G 2称为串联连接,图2-14(b )是它的等效方块图。从图2-14(a )得到 )()()(11s X s G s X i = )()()(12s X s G s X o = 所以 )()()()()()(21s X s G s X s G s G s X i i o == 因而 )()()(21s G s G s G = 即串联方块的等效方块的传递函数为各串联方块传递函数之积。 2.并联方块的等效 图2-15(a )所示传递函数分别为(s)G 1和(s)G 2两个方块,如果它们有相同的输人量,而输出量等于两个方块输出量的代数和,则(s)G 1和(s)G 2称为并联连接,图2-15(b )是它的等效方块图。 从图2-15中可见, )()()(22s X s G s X i = )()()(21s X s X s X o ±= 从而得到 )()()())()(()(21s X s G s X s G s G s X i i o =±= 因而 )()()(21s G s G s G ±= 所以并联方块的等效方块的传递函数为各并联方块传递函数之代数和。 3.方块图中反馈连接的等效 图2-16所示的具有反馈的方块图体现了自动控制系统的基本特点,其中(s)G 1称为前向传递函数, H(s)称为反馈传递函数。有 )()()(11s X s G s X o = )()()(s X s H s X o f = 图2-15 环节并联方框图 X i (s) )(s X o (a ) (b ) 图2-16 反馈环节方框图
工程图学A教学大纲
《工程图学A》教学大纲 课程编码:08297003-04 课程名称:工程图学(A) 英文名称:Mechanical Drawing(A) 开课学期:1-2 学时/学分:110/ 6.5 课程类型:学科基础课 开课专业:机械类专业本科生 选用教材:侯洪生主编《机械工程图学》科学2001年9月第一版 林玉祥主编《机械工程图学习题集》科学2001年9月第一版 主要参考书: 1、焦永和主编《机械制图》,理工大学2000年版 2、焦永和主编《机械制图习题集》,理工大学2000年版 3、孙兰凤主编《工程制图》,高等教育2004年版 4、曾维川主编《工程制图习题集》,高等教育2004年版 执笔人:侯洪生 一、课程性质、目的与任务 工程图学课程是研究绘制和阅读工程图样的一门技术基础课,它既有系统的理论又有较强的实践性和技术性。 在现代工业生产中,设计制造机器和进行工程建设都离不开工程图样。在使用机器设备时,也要通过阅读图样了解机器的结构和性能。因此,工程图样是人类用来表达和交流设计思想的重要工具,是工程技术部门的一项重要技术文件,是工程界的共同语言。每个工程技术人员必须掌握这种语言,否则就无法从事技术工作。 本课程为培养学生的绘图、读图和空间想象能力打下必要的基础。同时,它又是学生学习后续课程和完成课程设计和毕业不可缺少的基础知识。 二、教学基本要求 1.学习投影法(主要是正投影法)的基本理论及其应用; 2.学习、贯彻制图国家标准和有关的基本规定,培养查阅有关设计资料和标准的能力; 3.培养绘制(徒手绘图、尺规绘图和计算机绘图)和阅读机械图样的技能; 4.培养空间想象能力和图解空间几何问题的初步能力; 5.培养零、部件构型表达能力; 6.培养学生认真负责的工作态度和严谨细致的工作作风,使学生的动手能力、工程意识、创新能力、设计概念等得以全面提高。此外,还必须重视自学能力、分析问题和解决问题的能力以及审美能力的培养。 三、各章节内容及学时分配 绪论(0.5学时) 教学目的与要求 通过本部分的学习,要求学生了解图学发展史和图样在生产实践中的作用。
06918%20工程图学基础
湖北省高等教育自学考试课程考试大纲 课程名称:工程图学基础课程代码:06918 第一部分课程性质与目标 一、课程性质与特点 本课程是一门运用正投影法绘制和阅读机械图样,既有基本理论又有较多绘图实践的必修技术基础课。其主要目的是培养学生绘图和读图能力,为后续课程的学习打下必不可少的基础,也为参加实际工作培养读图及绘图的技能。 二、课程目标与基本要求 1.课程目标 1)学习正投影法的基本理论和有关国家标准,培养绘制和阅读机械图样的基本能力; 2)培养空间想象能力和空间分析的初步能力; 3)培养计算机绘图的初步能力; 4)培养认真负责的工作态度和严谨细致的工作作风。 2.基本要求 1)掌握正投影法的基本理论、方法和应用;了解轴测投影的基本知识,掌握绘制简单几何体正等测图的基本方法。 2)能阅读一般零件图和绘制简单零件图;能阅读中等复杂部件的装配图和绘制简单的装配图。 3)能较正确地使用绘图仪器和工具,基本掌握仪器绘图技术;了解计算机绘图的一些基本知识,能运用绘图软件绘制简单的零件图。 4)会查有关国家标准和有关手册,严格遵守、执行有关国家标准的各项规定,懂得在工艺结构方面要结合生产实际。 三、与本专业其他课程的关系 本课程是工科各专业必修的一门重要技术基础课,是学习后续各专业基础课、专业课的基础。 第二部分考核内容与考核目标 第一章工程制图基本知识 一、学习目的与要求 掌握工程制图的基本规定及图样中尺寸标注的基本方法,能正确绘制一些常用的几何图形,了解手工绘图的方法和步骤。 二、考核知识点与考核目标 (一)图样中尺寸标注基本方法、几何作图 识记:尺寸标注的基本要求、基本规则及尺寸组成 理解:斜度、锥度及圆弧连接 应用:能正确进行几何作图、尺寸标注
大学工程制图-第六章投影变换.
第六章投影变换 基本要求 §6-1概述 § 6-2换面法 n 11 !? 1 基本要求 (1)掌握换面法的基本原理和换面法作图的投影变换规律。 (2)学握用换血法求线段实心、平面图形实形及其对投影的倾角畢木作图方法。 (3)掌握用换面法解决一般空间儿何元素间的定位和度屋问题。
§6-1概述 半r(线或平而相对于投影而处于特殊位置(平行或垂 宜)时,他们的投影反映线段的实长、平面的实形及JVj投影 而的倾角。 当青线或平面和投影面处于一般位置时,则它们的投影就 不具备上述特性。 投影变换就足将直线或平而从一般位置变换为和投影面平 行或垂苴的位誉,以简便地解决它们地度晴和定位问题。 ! a洌ir~u rm
§6-2 换而法 换曲法就是保持空间几何元素不动,用新的投影*替換冋的投影面,使新投 影&对于空间几何元素处于有利于解題 —、换面法的基本概念二新投影面的选择原则 三、点的投影变换规律 四、六个基本问题 n If M 1 一、换面法的基木概念 换而法—空间几何元素的位置保持不动,用新的投影面来代替旧的投影面,使对新投彩面的相对位置变成有利解题的位置,然后找出其在新投影面上的投影?n II !? 1 VIH体JS0为Vi/H体糸
(二)、新投影面的选择必须符合以下两个基本条件: 1. 新投影面必须和空间几何元素处于有利解题的位置。 —tJ—厂4~~ ?小点的投影变换观律 1.点的一次变换 2. 新投影面必须垂直于一个不变投影面。 点的投影变换规律 3.点的两次变换 nnrHi
4 X! V ◎ s ;V |
(1)点的新投影和不变投影的连线,必垂直于新投影轴。 (2 ) 点的新投影到新投彩轴的距离等于点的旧投影到旧投影轴的距离。 I绝统in厂厂”1—
(完整word版)结构图等效变换举例
例1电枢控制式直流电动机结构图化简 ------- — Cm R{ Jm^ + fin ) 1 ?in —1 ―■- S Cm Ce 丄十 R(J in s + f m ) U Cm rr --- R(J in Si + fm) + CmCe s fin ?tn S [RJ m S+Rljn+ Cm JmS + fin RJm S + 1 S Rfin+CmCe
例2函数记录仪结构图化简 Axz i — I % ■?——? — *? 」?_卜 LUJ 7>十1 1 —— 岭 I 可- -------------------------------------------- 函数记录仪方框图 V+1 S L --- ? 1 + f 殳 F 矿、 淬斗 A_p 十 〔 g J V+1 吗 Au —*-0——
L % —— 匕心(心盼岛丢疋4) L — 十(&?心十址十圧忌匾乙心IF ? 例3结构图化简 _ ;- 1H A-------- 0*1 ]*o->| 厲r6 ■ 6 _—?o ■q1?他T?偽”■ T R工卜 H\十 R
R G4 丄G5G6 11+G2G3H2I+G J G^H S 比- R ------- △門GG疗f I+G2G3H2 G4 I+G4G5 Hs R G5G4 G J C;2-?O *■ A (1+ Gi G S H2)(I+G4G5H3) R G1G2H1G5G6+H4 - R
R qgG/q e ―? 1 + Gj±H Q+G A(J5H3-绻乞乩 + qG/GgG^GjGf E + 兄乩 例4结构图化简 」回 t ----- d a C⑸ —