第5章(5.5.2)均方误差准则(MSE)和LMS算法
5.5.2均方误差准则(MSE )和LMS 算法
引言:均方误差准则同时考虑ISI 及噪声的影响,使其最小化。
本节讨论问题: 1. 均方误差准则;
2. 无限长LMS 均衡器(C (z ),J min );
3. 有限长LMS 均衡器(C opt ,J min );
4. LMS 算法;
5. 均衡器的操作;
6. 递推LMS 算法收敛特性的分析。
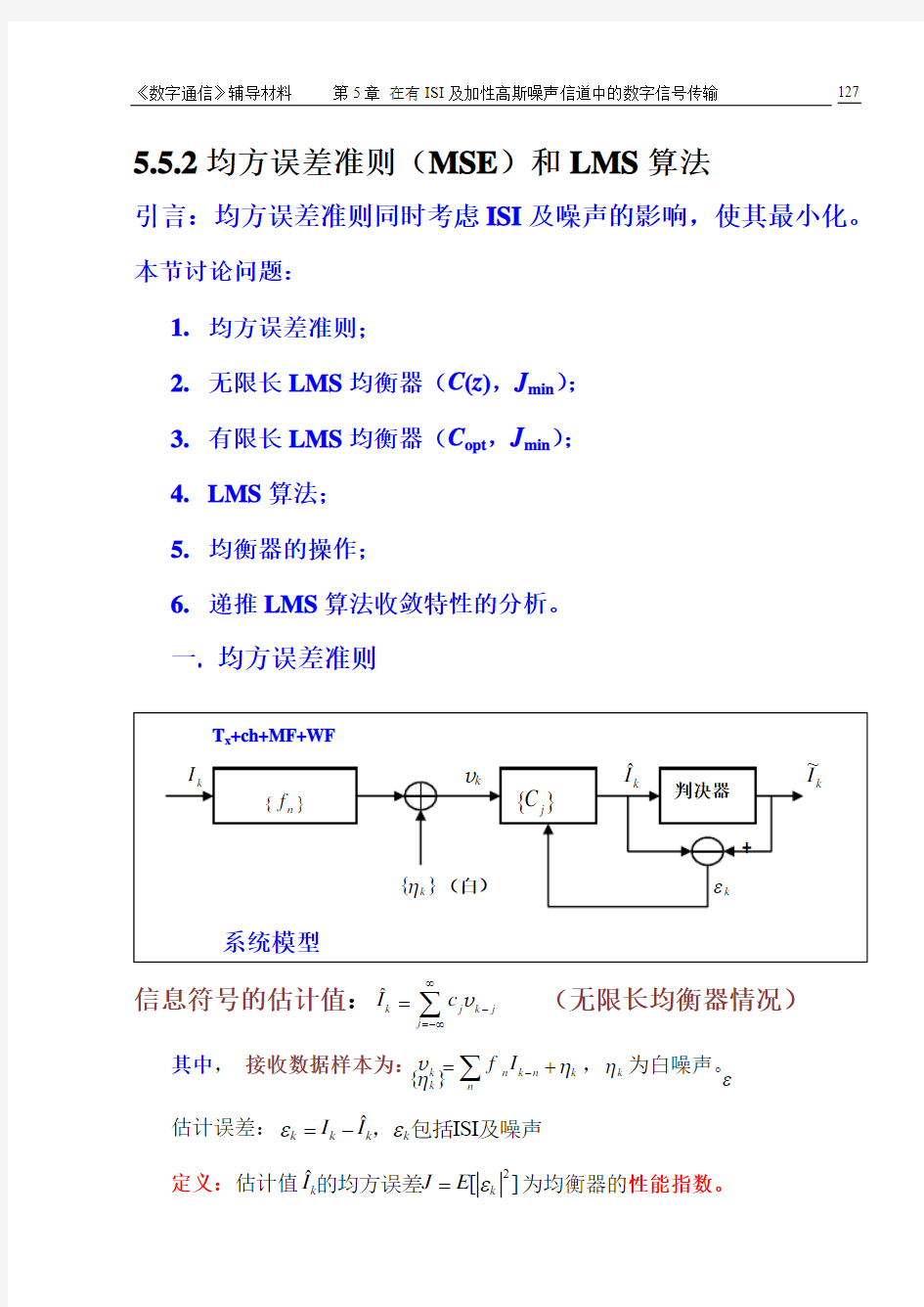
一. 均方误差准则
信息符号的估计值:?k j k j
j I c ∞
-=-∞
=
∑v (无限长均衡器情况)
其中, 接收数据样本为:k n k n k n f I η-=+∑v ,k η为白噪声。 估计误差:?ISI k k k k
I I εε=-,包括及噪声 定义:估计值2?[]k k
I J E ε=的均方误差为均衡器的性能指数。 }{k ηε
均方误差准则:使均方误差性能指数J 最小(min J ),此准则同时考虑使ISI 及噪声影响最小。
获得min J 的途径:调整{}j c ,当min J J =时,opt C C =(最佳抽头系数)
寻找opt C 的方法:1)根据正交性原理(线性均方估计):*
[]0k k l E l ε-=,所有v 。(注:与ZF 准则不同的是,这里的输入是经过两个输入滤波器的数据样本k v ,这就包含了噪声)。即*?[]0kkl E l ε-=,所有I 。
2)求函数极值方法:令
?0=→=??opt k
J
C C 2013年5月3日星期五上午讲于此处,已经是第十次矣。
这两种方法是等价的,证明如下。
证明:求导置零方法与正交性原理等价。
?l i m K
k
j
k
j j k
j
K j j K
I c c
∞
--→∞
=-∞
=-==∑
∑v v
lim T k K →∞
=V c
假如均衡器为有限长,则
?T k k
I =V c 其中
11T
k k K k K k
k K k K v v v v v ++--+-??=??V ,以及 1
1
T
K
K K K c c c c c --+-??=??c 。
()2
??[][()()]k k k k k
J E E I I I I ε**==--c *
[()]T k k k E I ε=-V c
故
{}k k J E ε*
?=-?V c
另一种方法:
()2
2
*??[][()()] {()()}
[][][][]
k k k k k k i k i k j k j i
j
k i k k i j k k j i j k i k j i
j
i
j
J E E I I I I E I c I c E I c E I c E I c c E ε*****
--****----==--=--=--+∑∑∑∑∑∑c v v v v v v
2
*[][][][]k i k k i j k k j i j k i k j i
j
i
j
E I c E I c E I c c E ****----=--+∑∑∑∑v v v v
可见,()J c 是{}j c 的平方函数(二次型)。求导置零可得:
*0k k l j k l k j j
l J E I c E c **
---?????=-+=?????∑v v v 即, ***0, k j k j k l j l J E I c l c --???????=--=-∞<<∞???????????
∑v v
()()**
00k k i k k i E E εε--∴==,或v v ,i -∞<<∞
{}k k J E ε*
?=-?V c
1
1
T
k k K
k K k
k K k K v v v v v ++--+-??=??V
结论:求导方法与正交性原理是等价的,满足正交条件,就可以获得最小MSE 。
二、无限长LMS 均衡器(()min J z C ,性能)
1. 求()z C :从正交原理出发,
()*
0k k l E ε-=v
(10-2-27)
即
*
[()]0k j k j
k l j E I c ∞
--=-∞
-
=∑v
v
即
()()
*
j
k -j
k -l k k l j c E E I ∞
-=-∞
=∑*v
v v (*) 正交条件
注: k l -v 是收数据样本,其中的噪声已经白化。
在(*)式左边可以得到:
{}********
0 k j k l n k j n k j m k l m k l n m n m k j n k l m k j k l n m n m k j n k l m lj
n
m
E E f I f I E f f I I f f E I I N ηηηηδ*------------------????????=++????????
????????=+??
??
=+∑∑∑∑∑∑v v
式中利用了[]0k n k n k k n
f I E ηη-=+=∑,v 。
注:j k jk j k kj j k ,)(δδδδδ==-==-都是Kroenecker 冲激或离散冲激的不同写法。 因此我们有:
***
,00[]k j k l n m n m l j lj m m l j lj n
m
m
E f f N f f N δδδ--+-+-=+=+∑∑∑v v
*
00
L
n n l j
lj n f f
N δ+-==+∑0 0,
l j lj x N l j L
else δ-?+-≤?=??? (A)
注:()()(1/)X z F z F z **=,()1F z **-代表了()F z 序列的共轭颠倒序列。或者说
()1F z **-代表了()F z 的MF(零时延)。
()()(1/)X z F z F z **=
()101L L f f z f z --=++
+1
1110()L L L L L z f f z f z f z **-*-+*--??++++?
?
000
L
L
L
L
L i
j
L
i j i
L j
i
L j i j i j z
f
z
f
z
z
f
f z -*
-*----======∑∑∑∑
00
L
L
L
i j i
L j i j z
f
f z *---===∑∑
00
L L
n i i n i n f f z *-===∑∑
L L
l n l n l L n f
f z
*-+=-==
∑∑(注:令l i n =-) 故
*0
L
l n n l n x f f +==∑,其支撑为:L l L -≤≤
或者说,可以得到
*
**
*
*0
L
L k
k n n
l
k l l l k n n k
n n k l
l
n n x f f
f f f f f f
f f ----+++===*====∑∑∑∑
也可以写为
j l j l L n j
l n n L
n j
l n n x f
f
f f
---=-+=-+==
∑∑)
(0
*
*
(*)式右边:
,*******
, 1
(){[]}{}{}k k l n k k l k n k l n k l n k k l n k k l n
n
c c E I E I f I f E I I E I δηη---------==+=+∑∑v
式中,,,10k k l n l n n l n l
δδ---=-?==?≠-?,当,当
由此可得
{}** , 0
l k k l
f L l E I --?-≤≤=??v (B)
将(A )、(B )两式代入(*)式:
*0[]j
l j
lj l j c x
N f δ∞
--=-∞
+=∑
上式就是: *
0l l l l c x N c f -?+=
取Z 变换: ()()110[()]()C z F z F z N F z **-**-+= (10-2-31)
则MMSE 均衡器 ()11
0()
()()F z C z F z F z N **-**-=+ (10-2-32) 等效MMSE 均衡器: ()()100
11
()()C z F z F z N X z N **-'=
=++
(10-2-33)
k
I ^
()
z C '
2. 求min J (最小均方误差) (1) 时域
2*****?[][()][][]k k k k k k k j k j
j
J E E I I E I E c εεεε-==-=-∑v 利用正交原理第二项为零,所以
2**min ?[()][][()]k k k k k j k j
j
J E I I I E I E I c -=-=-∑v *
[]j k j k j j j
j
c c E I c c f --=-=-∑∑v (利用(B)式)
令信息符号的平均功率为1,则
2
[]1k c E I ==
min 0
11j
j l l
l j J c
f c f ∞
-==-∞
=-
=-?∑
(2)频域
通过z 变换及令,T j e z ω=将min J 式的{}关系变换成n f J ~min
()
()关系ωωH e X J T j ?~min
全传输系统响应:{}()()()0
N z X z X z B b n +=? (10-2-35)
以z 反变换(留数法)求:
()112n-n c
b B z z dz j
π=
?
()()()1001122c
c
X z b B z z dz dz j
j
z X z N ππ-∴=
=
+????
?
?
(10-2-36)
j T z e T
ωπ
ω=≤
令,且,
()
()()()
()00
1
2 2j T T
j T j T j T T j T
T j T
T
X e b e e jT d j X e N X e
T
d X e
N
ωπ
ωωπωωπ
π
ωω
πω
π
---
=
??+=
+?? (10-2-37)
代入 min 01J b =-,得
()0
m i n 0
2T j T
T
N T
J d X e
N
π
π
ωωπ
-
=
+?
将()j T X e ω以信道折叠谱表示。因为
()()()
k t kT
x x kT h t h t *===?-
()()h t h t *?-的傅里叶变换为2
()H ω,故
2
12()FT
k k n n x t kT H T T πδω∞
∞=-∞
=-∞??-←?→+ ???∑∑
又
22()()()j ft j fkT k k k k k k k FT x t kT x t kT e dt x e DTFT x ππδδ∞
∞∞∞
--=-∞=-∞
=-∞-∞??-=-==????∑∑∑?
所以
()2
12 j T
n n X e H T T T ωππωω∞=-∞??=+≤ ?
??∑, (10-2-18) 所以
min
2
for ISI 0
212T T
n T T
N J d n H N T T π
π
ωπ
πω-
∞
=-∞===?
?++ ???
?∑ (10-2-38)
所以,当ISI=0时, 0
min min 0
011N J J N =
<<+, (10-2-39) 因k k k I I ?-=ε,故?k k k I I ε=+,22?[||]||k k k E I E I ε=-,利用正交原理*?[]0k k l
E ε-=I ,易证:
222?||||||k k k E I E I E ε=+,即2min ?[]1k E I J =-。 输出SNR: 2min
2
min
?[]1[]
k k E I J J E γε∞-=
=
(10-2-40)
三、有限长LMS 均衡器 (opt C ,
min J )
均方误差:()2
2
?[]K k k k j k j
j K J k E I I E I c -=-??
??=-=-????∑v {}k k J E ε*
?=-?V C
101T
K K K K c c c c c --+-??=??C 1
1T
k k K
k K k
k K k K v v v v v ++--+-??=??V
k
I =
1、求opt C :无限长均衡器
*0[]j
l j
lj l j c x
N f δ∞
--=-∞
+=∑
仿上面无限长均衡器的推导: 根据正交条件:
[]
*0l K
K
j lj j
l j
f N x
c --=-=+∑δ
令0lj l j lj x N δ-??Γ=+??
则0 0,l j lj lj x N l j L δ-?+-≤?Γ=???,
其他
(注: l x 的支撑为l L ≤。)
令 *
00 l l f L l ξ-?-≤≤?=???,
,
其他
得
∑-==Γ
K
K
j l lj
j
c ξ (10-2-43)
矩阵形式:ΓC =ξ (10-2-46)
所以, 1opt -=C Γξ (10-2-47)
说明:opt C , ξ为有)12(+K 个元素的列向量
Γ为(2K+1)×(2K+1)的Hermitian 矩阵。
因为自相关函数*k k x x -=且*lj jl δδ=,所以ij ??=Γ??
Γ中元素满足*
ij ji Γ=Γ。Γ是共轭转置阵(Hermite )阵。
2、求均衡器的性能即求最小能达到的均方差min J : 前已经证明min 1j
j j J c
f ∞
-=-∞
=-
∑
将opt C 代入()K J min 式:
1min ()111j j opt j K
J K c f **--=-''=-
=-=-∑
ξC ξΓξ (10-2-48)
注:j f 的支撑为0j L ≤≤。
工程实用方法: 采用简单的迭代过程——最速下降法。
四. LMS 算法:
内容: a)算法:k k k G C C ?-=+1 (理论算法)
b)梯度: ()k k k k
dJ E d ε*
=
=-G V C c) 工程实用算法:1??k k k k ε*++?C =C V d) 均衡器结构:图11-1-2
1、算法:LMS 算法是一种最陡下降法,其实质是一个迭代过程,而迭代过程是通过递推运算来进行的。 设{}j c 有(2K +1)个抽头
递推运算: ()()()K K j k c k c k c j j j ,,,,
0 1-=+=+δ 每次迭代变化量: ()()k G k c j j ?-∝δ 令 ()()k G k c j j ?-=δ 则 ()()()k G k c k c j j j ?-=+1 或矩阵形式: k k k G C C ?-=+1,
式中?为调节阶距(步长)注:可以看到
()()
()K K j k G k c k c j j j ,,,,0 1
1-=?-=-+,
即强制要求抽头系数向着误差下降的方向变化。 则 ()()()k G k c k c j j j ?-=+1 或矩阵形式: k k k G C C ?-=+1,
式中?为调节阶距(步长step ),其中第k 符号时间的抽头系数列矢量(即
均衡器)为:
101()()
()
()()T
k K K K K c k c k c k c k c k --+-?
?=??C
,j opt j j ()()()
曲线的梯度次迭代时,为第j j j c J k k dc k dJ k G ~=
2、梯度:
{}k k k k
dJ E d ε*
=
=-G V C
{}k k k k
dJ E d ε*
=
=-G V C 11T
k k K
k K k
k K k K v v v v v ++--+-??=??V
讨论:1)理想情况下,经过若干次迭代(时0k k =),
0min
{}0()opt k k k
E J k J ε*
=??
=-=??
=??C C G V
2)实际情况中,计算k G 困难
*[]k k k E ε=-G V 统计平均, 不实时
为克服这一困难,用估计值k
G ?取代梯度真值k G *
[]k k k E ε=-G V
对k G 的无偏估计有:?{}k k E =G G 则
k
k k V G *?ε-= k G 为梯度真值,k
G ?为真值k G 的无偏估计量。
3. 工程实用LMS 算法:
k k k G C C ???1?-=+ (11-1-9) 即 *1??k
k k k V C C ε?+=+ (11-1-11) 或 k
k k k V C C *1??ε?+=+
在商用的自适应均衡器中,为简化乘法运算次数,仅取k v 和(或)k ε的正负号进行运算,而不管大小。其优点是简单,易实现,运算次数少;缺点是收敛慢。 如:
()()()()
*
1csgn csgn j j k k j c k c k v ε-+=+? (11-1-14)
定义复符号函数:()()()()
()()()()()()()()()1 Re 0Im 01 Re 0Im 0csgn 1 Re 0Im 01 Re 0Im 0j x x j x x x j x x j x x ?+>>?
->??
--<
,
,
(11-1-15)
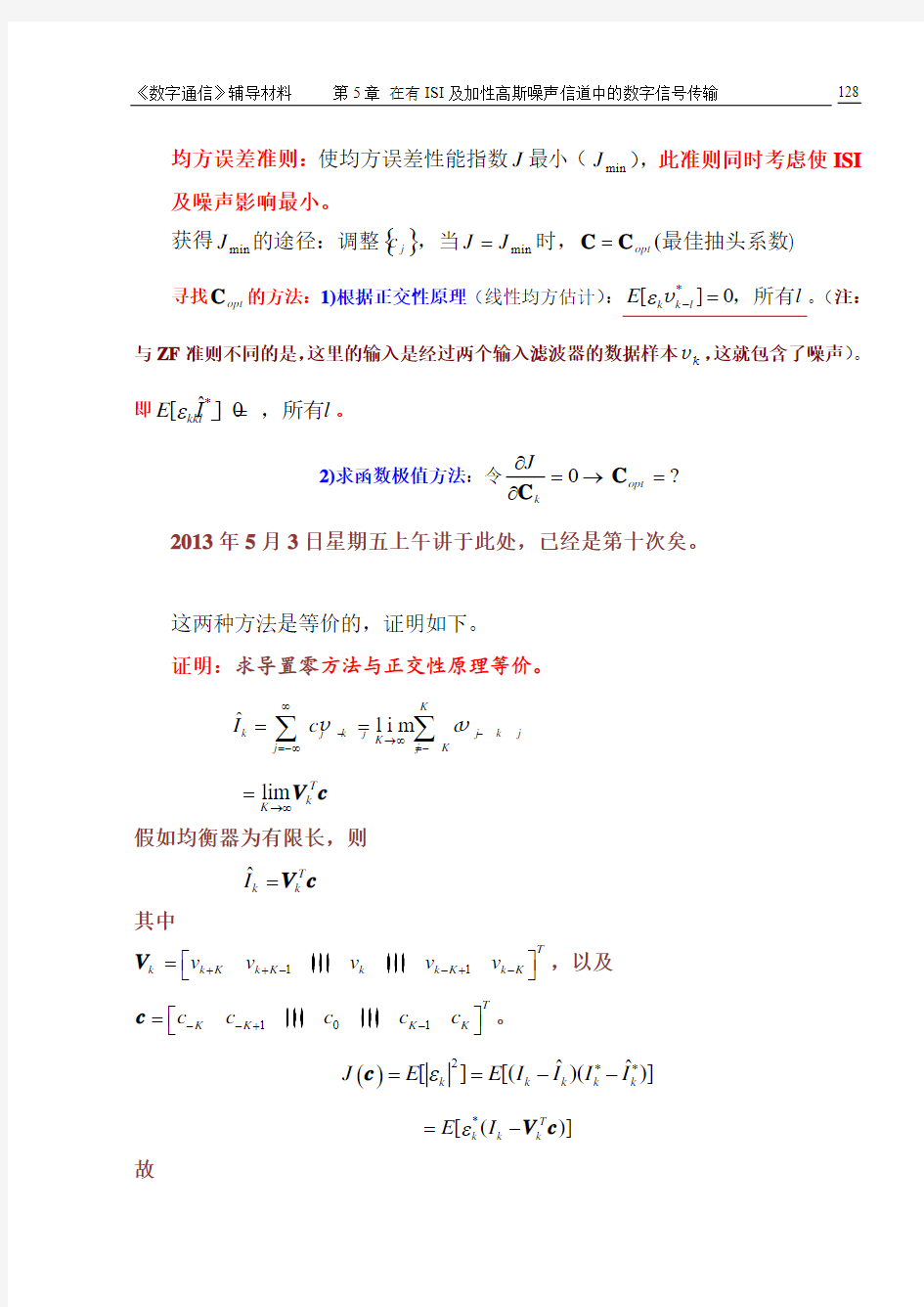
4. 均衡器结构
图11-1-2 基于MSE 准则的线性自适应均衡器
五. 均衡器的操作过程 1. 方框图
2. 两种工作模式(状态)
(1)训练模式(training mode ): k
k k I I ?-=ε (2
)工作模式(run mode ): k k k I I ?~-=ε, 2
10- ,即使有错判,由于?很小,由此引起的误调整影响很小。 3. 步长?选择与收敛特性 训练时:1? 1?大—加速初始调整,接近m i n J 工作时:2? 2?小—稳态误差小,m i n J J ≈ 步长?选择考虑:●稳定且收敛快 ● 稳态MSE 小 k I 六. 递推LMS 算法收敛特性的分析 1、引言 说明三个问题:要解决什么问题;分析从何入手;分析的方法。 (1) 算法表示 理论上LMS 算法: k k k G C C ?-=+1, (A ) 实用的递推算法: *1??k k k k V C C ε?+=+ (B ) 梯度向量有噪无偏估计值:*?k k k V G ε-= (2) 问题 ● 收敛特性与?的关系? ● 如何选择?,以确保收敛? 因为{} k k E G G ?=,即k G ?为真值k G 的无偏估计, 所以,?对收敛特性的影响,对(A )(B )两式是相同的。 为数学分析方便,我们只研究(A )式的收敛特性。 (3) 收敛特性的分析方法 采用反馈系统稳定性的分析方法: ● 建立以1+k C 输出的闭环系统模型,定性分析?的影响; ● 建立系统的差分方程,定量分析?的影响。 2、闭环系统模型——定性分析收敛特性 算法: 1k k k +=-?C C G (A ) 式中, ()k k k =--G =ΓC -ξξΓC (B ) Γ-接收信号自相关矩阵,由[]k j k l E v v *--确定。 ξ-互相关矩阵,由[]k k l E I v *-确定。 分析:由(A )式可看出 (1)k C 的迭代过程可以看作:每次迭代增量(k k δ=-?C G )的累积过程 —由保持器实现; (2)第k 时刻计算的增量(k -?G )应在第(k+1)时刻反映出来 —由延迟(Z -1)来实现。 结论:对闭环输出1k +C 收敛特性影响因素:, ?Γ 3、系统的差分方程——定量分析收敛特性 由(A)式 1=()k k k k k +=-?-?C C G C ΓC -ξ 得 1()k k +=-?+?C I ΓC ξ (A ') (11-1-20) 为一阶差分方程组,即 1(21)k k C I C K ξ+???????? ? ? ????????=-?Γ +?+????????????????????? ?????? 因为Γ不是对角矩阵,故,(2K+1)个一阶差分方程是相互耦合的,必须联解。所以,用解联立方程组来定量分析收敛特性是困难的。 解决方法:利用线性变换(酉变换)来解耦。 ①Γ为Hermite (厄米特)矩阵,可用U (酉矩阵)表示为 *'=ΓU ΛU (U -1) (11-1-21) 1 2 N λλλ????? ?=????? ? Λ 式中,U (酉矩阵)由Γ的特征向量确定。 Λ(对角矩阵)的对角元素为Γ的特征值,特征值{}i λ为特征方程 0λ-=ΓI 的根。 ②再利用U 矩阵的性质: *'=U U I (U -2) ③将(U -1)式代入(A ')式,两边再乘*'U ,然后利用(U -2)式,可得 1()k k +=-?+?ξΛC I C (11-1-22) 式中, 11 k k k k *++**'?=? '=??'=? C U C C U C ξU ξ 1 () () () k k k k +=-?+ ?ΛC I C ξ 信道特性反映迭代生不迭代而化的化量与与有产随变变无关关 说明:(1)因为Λ为对角矩阵,所以一阶差分方程组是线性不相关的(即解耦)。 (2) 收敛特性取决于其齐次方程组: 1()k k +=-?C I ΛC (11-1-23) 即表示成(2K+1)个一阶差分方程组: ,(1),()0,(1)0,()0 ,(1),()111K k K k K k k K k K k K C C C C C C λλλ-+--++???? -?????? ?????? ?????????=-???? ?????? ???? ??? ??-?? ????? 可见,(2K+1)个{}i λ与(2K+1)个{}i C 对应。 对第j 个抽头系数C j 的差分方程为 ,(1) ,()(1)j k j j k C C λ+=-? ,,0, ,0,1,2, j K K k =-= 其相应的闭环系统模型为: 系统函数为: 1 1 1(1)j z λ---? 令11(1)0j z λ---?=,得极点:1j z λ=-? 要使迭代过程收敛,应使极点在单位圆内,即 11j λ-?< (11-1-24) 即, 111j λ-<-?< ,() j k C ,(1) j k C + 又因为{}j λ为Γ的(2K+1)个特征值;而Γ为自相关矩阵、Hermite 型、正定 的,因此,0 ( )j all j λ>,则 2 0j λ 又因为各抽头用统一的步长?,为保证稳定收敛,以max λ确定?。 因此,若步长?满足:max 2 0λ , 则递推算法是稳定的,收敛的。 式中,max λ是Γ的最大特征值,其上界为 max ,00trace (21)(21)()K j j j j K K K x N λλ =-< ==+Γ=++∑Γ ,0,000(21)(), all j j K x N j Γ=Γ=++ 4、收敛特性的分析 (1)收敛特性~? 在满足稳定递推运算条件下(即max 2 0λ ), ??↑?↑? ?↑?? 收速度差敛稳态误矛盾解决方法:分12 ??, (一般21 /10 ??=)。 LMS 算法的优点:简单,各抽头用同一个?。 LMS 算法每次迭代时,一个抽头做两次计算(一次乘法,一次加法), 则N 个抽头(这里N=2K+1),每次迭代计算量为2N+1≈2N 。 LMS 算法的缺点:收敛慢。 因为按max λ确定?,牺牲了大多数抽头乃至整个系统的收敛速度。 (2)收敛特性~λ(max λ,min λ) 收敛速度~max min λ λ?? ??? 比值有关。 若max min 1λλ?? → ??? ,选择适当的Δ,可快速收敛。 若max min 1λλ?? >> ??? ,收敛慢。 (3) 收敛特性~信道频率响应()C f 的关系 ~~~~()j n x f C f λΓ 对有深度衰减的信道,max min 1λ λ?? >> ??? ,收敛慢。