计算智能与智能系统课程实验1:利用MATLAB模糊逻辑工具箱建立模糊推理系统
实验容:
1.完成上述思考题。
2.分别用两种推理方式(Mamdani方法与Sugeno方法)对课本4.6小节中的三个规
则、两输入一输出的例子建立模糊推理系统。
3.需给出以上相关的结果图,并在每幅图的下方,需对该图进行必要的文字解释。
4.用统一封面(见群共享)。
1.思考题
(1)改变各模糊子集的隶属函数,比较结果。
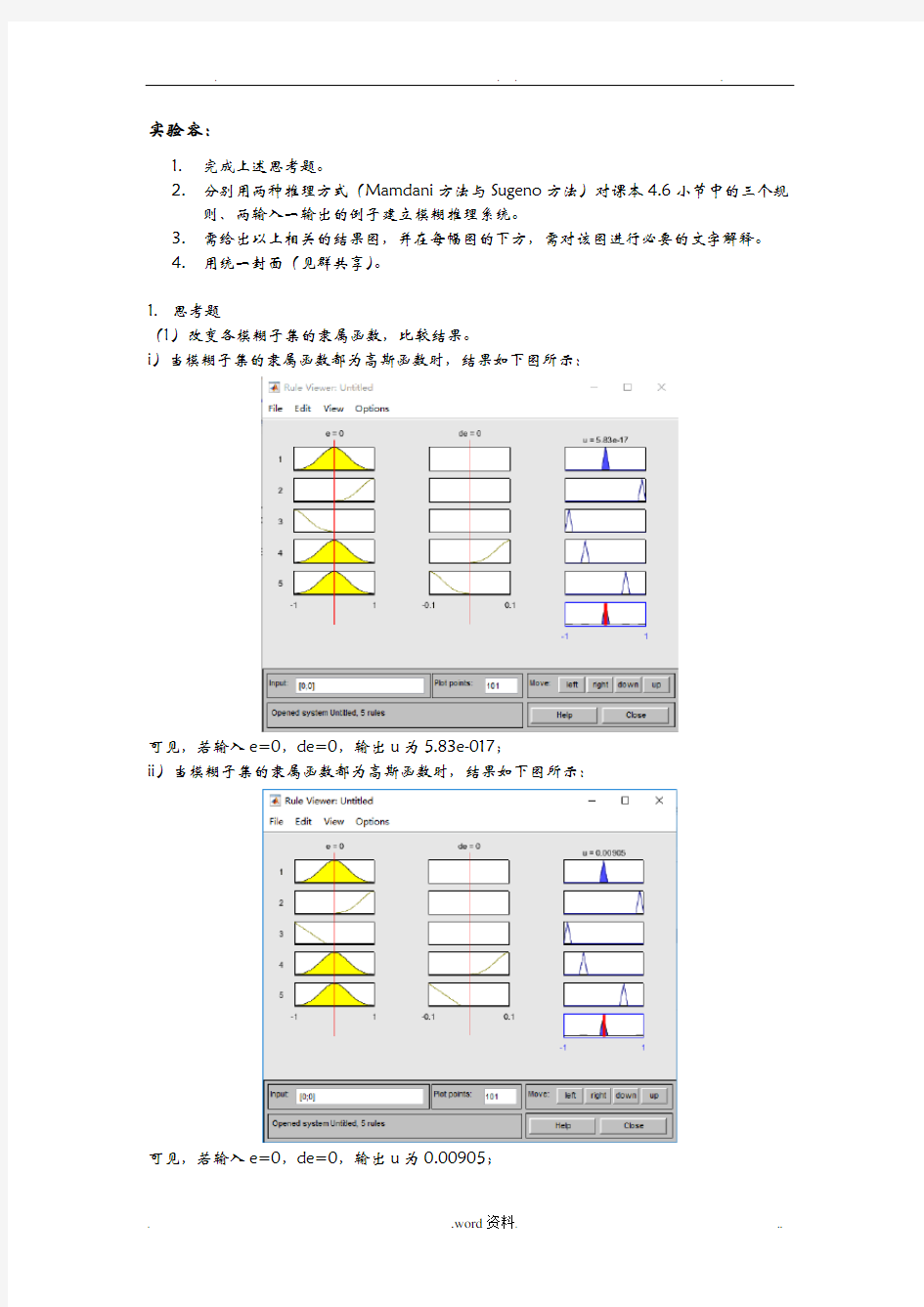
i)当模糊子集的隶属函数都为高斯函数时,结果如下图所示:
可见,若输入e=0,de=0,输出u为5.83e-017;
ii)当模糊子集的隶属函数都为高斯函数时,结果如下图所示:
可见,若输入e=0,de=0,输出u为0.00905;
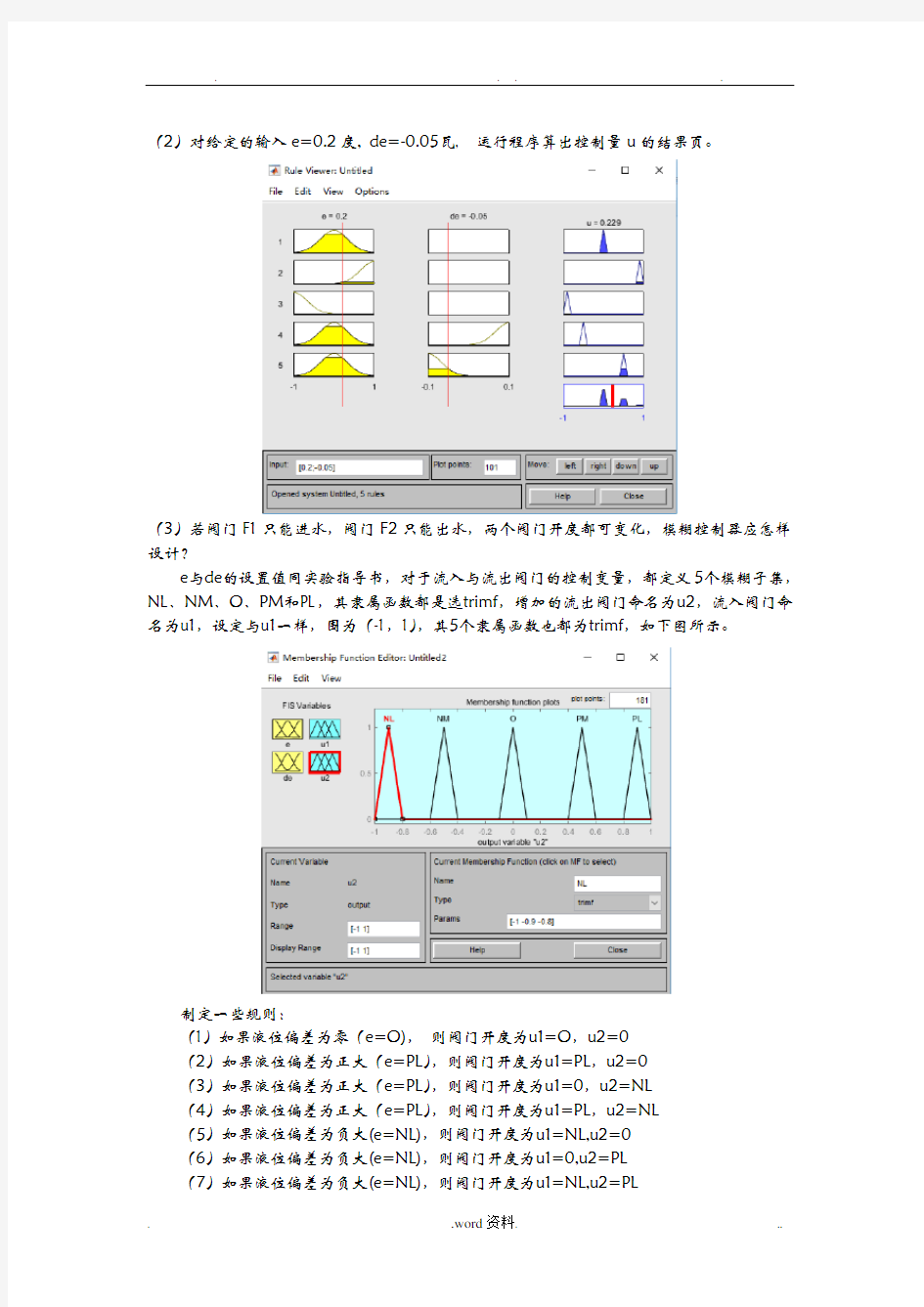
(2)对给定的输入e=0.2度, de=-0.05瓦, 运行程序算出控制量u的结果页。
(3)若阀门F1只能进水,阀门F2只能出水,两个阀门开度都可变化,模糊控制器应怎样设计?
e与de的设置值同实验指导书,对于流入与流出阀门的控制变量,都定义5个模糊子集,NL、NM、O、PM和PL,其隶属函数都是选trimf,增加的流出阀门命名为u2,流入阀门命名为u1,设定与u1一样,围为(-1,1),其5个隶属函数也都为trimf,如下图所示。
制定一些规则:
(1)如果液位偏差为零(e=O),则阀门开度为u1=O,u2=0
(2)如果液位偏差为正大(e=PL),则阀门开度为u1=PL,u2=0
(3)如果液位偏差为正大(e=PL),则阀门开度为u1=0,u2=NL
(4)如果液位偏差为正大(e=PL),则阀门开度为u1=PL,u2=NL
(5)如果液位偏差为负大(e=NL),则阀门开度为u1=NL,u2=0
(6)如果液位偏差为负大(e=NL),则阀门开度为u1=0,u2=PL
(7)如果液位偏差为负大(e=NL),则阀门开度为u1=NL,u2=PL
(8)如果液位偏差为零(e=O) ,且偏差率正大(de=PL),则阀门开度为u1=NM,u2=0 (9)如果液位偏差为零(e=O) ,且偏差率正大(de=PL),则阀门开度为u1=0,u2=PM (10)如果液位偏差为零(e=O) ,且偏差率正大(de=PL),则阀门开度为
u1=NM,u2=PM
(11)如果液位偏差为零(e=O) ,且偏差率负大(de=NL),则阀门开度为u1=PM,u2=0 (12)如果液位偏差为零(e=O) ,且偏差率负大(de=NL),则阀门开度为
u1=0,u2=NM
(13)如果液位偏差为零(e=O) ,且偏差率负大(de=NL),则阀门开度为
u1=PM,u2=NM
如下图所示:
当e=0,de=0时,u1=6.05e-17,u2=6.05e-17,如下图所示:
当e=0.3,de=0.04时,即水位偏低,有往上趋势时,结果为u1=0.00395,u2=-0.00395,如下图说是,即流入阀门稍微调大,流出阀门稍微调小,因此所指定的规则是合理的。
2.分别用两种推理方式(Mamdani方法与Sugeno方法)对课本4.6小节中的三个规则、两输入一输出的例子建立模糊推理系统。
(1)Mandani类型的推理:
键入两个输入x和y,一个输出z,x围是(0,1)有三个论域A1、A2、A3,y围是(0,1),论域有两个B1、B2,z的围是(0,100),论域也有三个C1、C2、C3,如下图所示:
输入规则:
当x=0.35,y=0.6时,结果如下图所示:
此时z=64.1,与书中的结果略有误差,这是由于隶属函数的围存在误差引起的。
(2)Sugeuo类型的推理:
选择函数类型为Sugeuo类型,并设置好命名:
(2)设置隶属函数
隶属函数,
同样键入两个输入x和y,一个输出z,x,y的设置与Mandani所设置的一致,z的C1、C2、C3的参数分别为20,50,80,如下图所示:
设置同样的规则:
MATLAB实验报告50059
实验一MATLAB操作基础 实验目的和要求: 1、熟悉MATLAB的操作环境及基本操作方法。 2、掌握MATLAB的搜索路径及设置方法。 3、熟悉MATLAB帮助信息的查阅方法 实验内容: 1、建立自己的工作目录,再设置自己的工作目录设置到MA TLAB搜索路径下,再试 验用help命令能否查询到自己的工作目录。 2、在MA TLAB的操作环境下验证课本;例1-1至例1-4,总结MATLAB的特点。 例1-1
例1-2 例1-3 例1-4
3、利用帮助功能查询inv、plot、max、round等函数的功能。 4、完成下列操作: (1)在matlab命令窗口输入以下命令: x=0:pi/10:2*pi; y=sin(x); (2)在工作空间窗口选择变量y,再在工作空间窗口选择回绘图菜单命令或在工具栏中单击绘图命令按钮,绘制变量y的图形,并分析图形的含义。
5、访问mathworks公司的主页,查询有关MATLAB的产品信息。 主要教学环节的组织: 教师讲授实验目的、开发环境界面、演示实验过程,然后同学上机练习。 思考题: 1、如何启动与退出MA TLAB集成环境? 启动: (1)在windows桌面,单击任务栏上的开始按钮,选择‘所有程序’菜单项,然后选择MA TLAB程序组中的MA TLABR2008b程序选项,即可启动 MATLAB系统。 (2)在MA TLAB的安装路径中找到MA TLAB系统启动程序matlab.exe,然后运行它。 (3)在桌面上建立快捷方式后。双击快捷方式图标,启动MA TLAB。 退出: (1)在MA TLAB主窗口file菜单中选择exitMATLAB命令。 (2)在MA TLAB命令窗口中输入exit或quit命令。 (3)单击MATLAB主窗口的关闭按钮。 2、简述MATLAB的主要功能。 MATLAB是一种应用于科学计算领域的数学软件,它主要包括数值计算和符 号计算功能、绘图功能、编程语言功能以及应用工具箱的扩展功能。 3、如果一个MATLAB命令包含的字符很多,需要分成多行输入,该如何处理?
matlab实验报告
数学实验报告 班级: 学号: 姓名: 实验序号:1 日期:年 月 日 实验名称:特殊函数与图形 ◆ 问题背景描述:绘图是数学中的一种重要手段,借助图形,可以使抽象的对象得到 明白直观的体现,如函数的性质等。同时,借助直观的图形,使初学者更容易接受新知识,激发学习兴趣。 ◆ 实验目的:本实验通过绘制一些特殊函数的图形,一方面展示这些函数的特点属性, 另一方面,就 Matlab 强大的作图功能作一个简单介绍。 实验原理与数学模型: 1、 球2222x y z R ++= ,x=Rsin φcos θ, y= Rsin φsin θ, z= cos φ, 0≤θ≤2π , 0≤φ≤π 环面 222222222()4(),(cos )cos ,x y z a r a x y x a r φθ+++-=+=- (cos )sin ,sin ,02,02y a r z r φθφφπθπ=-=≤≤≤≤ 2、 平面摆线:2 22 31150,(sin ),(1cos ),0233 x y x a t t y a t t π+-==-=-≤≤ 3、 空间螺线:(圆柱螺线)x=acost , y=asint , z=bt ;(圆锥螺线)22 cos ,sin ,x t t y t t z t === 4、 椭球面sin cos ,sin sin ,cos ,02,0x a y b z c φθφθφθπφπ===≤<≤≤ 双叶双曲面3 tan cos ,tan sin ,sec ,02,22 x a y b z c π φθφθφθπφπ===≤<- << 双曲抛物面2 sec ,tan 2 u x au y bu z θθ=== 实验所用软件及版本:mathematica(3.0) 主要内容(要点): 1、 作出下列三维图形(球、环面) 2、 作出下列的墨西哥帽子 3、 作出球面、椭球面、双叶双曲面,单叶双曲面的图形 4、 试画出田螺上的一根螺线 5、 作出如图的马鞍面
基于模糊控制的速度跟踪控制问题(C语言以及MATLAB仿真实现)
基于模糊控制的速度控制 ——地面智能移动车辆速度控制系统问题描述 利用模糊控制的方法解决速度跟踪问题,即已知期望速度(desire speed),控制油门(throttle output)和刹车(brake output)来跟踪该速度。已知输入:车速和发动机转速(值可观测)。欲控制刹车和油门电压(同一时刻只有一个量起作用)。 算法思想 模糊控制器是一语言控制器,使得操作人员易于使用自然语言进行人机对话。模糊控制器是一种容易控制、掌握的较理想的非线性控制器,具有较佳的适应性及强健性(Robustness)、较佳的容错性(Fault Tolerance)。利用控制法则来描述系统变量间的关系。不用数值而用语言式的模糊变量来描述系统,模糊控制器不必对被控制对象建立完整的数学模式。 Figure 1模糊控制器的结构图 模糊控制的优点: (1)模糊控制是一种基于规则的控制,它直接采用语言型控制规则,出发点是现场操作人员的控制经验或相关专家的知识,在设计中不需要建立被控对象的精确的数学模型,因而使得控制机理和策略易于接受与理解,设计简单,便于应用。 (2)由工业过程的定性认识出发,比较容易建立语言控制规则,因而模糊控制对那些数学模型难以获取,动态特性不易掌握或变化非常显著的对象非常适用。 (3)基于模型的控制算法及系统设计方法,由于出发点和性能指标的不同,容易导致较大差异;但一个系统语言控制规则却具有相对的独立性,利用这些控制规律间的模糊连接,容易找到折中的选择,使控制效果优于常规控制器。 (4)模糊控制是基于启发性的知识及语言决策规则设计的,这有利于模拟人工控制的过程和方法,增强控制系统的适应能力,使之具有一定的智能水平。 简化系统设计的复杂性,特别适用于非线性、时变、模型不完全的系统上。 模糊控制的缺点
北京师范大学模糊系统与人工智能方向简介(讨论稿)
北京师范大学模糊系统与人工智能方向简介(讨论稿) 北京师范大学模糊数学与人工智能方向是国内最早从事模糊数学及其应用研究的单位之一,可以说是国内模糊数学研究的重要基地。早在1979年北师大数学科学学院开始就开始招收模糊数学研究方向的硕士研究生,是我国最早从事模糊数学研究的硕士学科点。1986年,汪培庄先生牵头,以模糊数学为主申请下来应用数学博士点,这也是我国最早从事模糊数学研究的博士学科点。迄今为止,北师大数学科学学院已培养几十名硕士和博士研究生,并且在各种工作岗位已成为骨干力量。 北京师范大学模糊系统与模糊信息研究中心暨复杂系统实时智能控制实验室创建于2000年。现任中心主任为国家级有突出贡献中青年专家李洪兴教授。目前,实验室拥有博导教授2人,副教授3人,博士后2人,在读博士生15人(其中具有教授职称者2人,副教授4人),硕士研究生19人。该研究中心现有一个应用数学的博士学位授权点,应用数学和控制理论与控制工程两个硕士学位授权点。 1982年至今,北京师范大学模糊数学与人工智能研究群体先后提出并研究了因素空间、真值流推理、随机集落影、模糊计算机、模糊摄动理论、幂结构提升理论、基于变权综合的智能信息处理、模糊系统的插值表示、变论域智能计算、复杂系统建模以及知识表示的数学理论模糊计算机等一些先进的理论方法。近期的主要研究成果包括: 1)给出因素空间理论,建立知识表示的数学框架,并系统研究概念的内涵与外延表示问题,为专家经验、领域知识在软件系统中的表示与计算提供了理论基础; 2)揭示了模糊逻辑系统的数学本质,给出常用模糊逻辑系统地插值表示,并系统研究了模糊逻辑系统的构造、分析以及泛逼近性等理论问题; 3)提出变论域自适应智能信息处理理论,设计了基于变论域思想的一类高精度模糊控制器,在世界上第一个实现了四级倒立摆控制实物系统,经教育部组织专家鉴定,确认这是一项原创性的具有国际领先水平的重大科研成果; 4)引入变权的概念,并给出基于自适应变权理论的智能信息处理方法; 5)提出模糊计算机的概念,并研究了模糊计算机设计的若干理论问题; 6)给出数学神经网络理论,从数学上揭示了模糊逻辑系统与人工神经网络之间的关系,首次定义了“输出返回”的模糊逻辑系统并证明了它与反馈式神经
Matlab 的 Fuzzy 工具箱实现模糊控制
Matlab的 Fuzzy 工具箱实现模糊控制(rulelist的确定) 用Matlab的 Fuzzy 工具箱实现模糊控制- - 用Matlab中的 Fuzzy 工具箱做一个简单的模糊控制,流程如下: 1、创建一个 FIS (Fuzzy Inference System ) 对象, a = newfis(fisName,fisType,andMethod,orMethod,impMethod, aggMethod,defuzzMethod) 一般只用提供第一个参数即可,后面均用默认值。 2、增加模糊语言变量 a = addvar(a,'varType','varName',varBounds) 模糊变量有两类:input 和 output。在每增加模糊变量,都会按顺序分配一个 index,后面要通过该index 来使用该变量。 3、增加模糊语言名称,即模糊集合。 a = addmf(a,'varType',varIndex,'mfName','mfType',mfParams) 每个模糊语言名称从属于一个模糊语言。Fuzzy 工具箱中没有找到离散模糊集合的隶属度表示方法,暂且用插值后的连续函数代替。 参数mfType即隶属度函数(Membership Functions),它可以是Gaussmf、trimf、trapmf等,也可以是自定义的函数。 每一个语言名称也会有一个 index,按加入的先后顺序得到,从 1 开始。 4、增加控制规则,即模糊推理的规则。 a = addrule(a,ruleList) 其中ruleList是一个矩阵,每一行为一条规则,他们之间是 ALSO 的关系。 假定该 FIS 有 N 个输入和 M 个输出,则每行有 N+M+2 个元素,前 N 个数分别表示 N 个输入变量的某一个语言名称的 index,没有的话用 0 表示,后面的 M 个数也类似,最后两个分别表示该条规则的权重和个条件的关系,1 表示 AND,2 表示 OR。 例如,当“输入1” 为“名称1” 和“输入2” 为“名称3” 时,输出为“ 输出1” 的“状态2”,则写为: [1 3 2 1 1] 5、给定输入,得到输出,即进行模糊推理。 output = evalfis(input,fismat) 其中fismat为前面建立的那个 FIS 对象。 一个完整的例子如下: clear all; a = newfis('myfis'); a = addvar(a,'input','E',[0 7]); a = addmf(a,'input',1,'small','trimf',[0 1 4.333]); a = addmf(a,'input',1,'big','trimf',[1.6667 6 7]); a = addvar(a,'output','U',[0 7]); a = addmf(a,'output',1,'small','trimf',[0 1 4.333]);
Matlab数学实验报告一
数学软件课程设计 题目非线性方程求解 班级数学081 姓名曹曼伦
实验目的:用二分法与Newton迭代法求解非线性方程的根; 用Matlab函数solve、fzero、fsolve求解非线性方程(组)的解。 编程实现二分法及Newton迭代法; 学会使用Matlab函数solve、fzero、fsolve求解非线性方程(组)的解。 通过实例分别用二分法及迭代法解非线性方程组并观察收敛速度。 实验内容: 比较求exp(x)+10*x-2的根的计算量。(要求误差不超过十的五次方) (1)在区间(0,1)内用二分法; (2)用迭代法x=(2-exp(x))/10,取初值x=0 。 试验程序 (1)二分法: format long syms x s=exp(x)+10*x-2 a=0; b=1; A=subs(s,a) B=subs(s,b) f=A*B %若f<0,则为由根区间 n=0; stop=1.0e-5; while f<0&abs(a-b)>=stop&n<=100; Xk=(a+b)/2; %二分 M= subs(s, Xk); if M* A<0 symbol=1 %若M= subs(s, Xk)为正,则与a二分 b= Xk else symbol=0 % 若M= subs(s, Xk)为负,则与b二分 a= Xk end n=n+1 end Xk n (2)牛顿迭代法; format long
syms x s= (2-exp(x))/10; %迭代公式 f=diff(s); x=0; %迭代初值 a=subs(f,x); %判断收敛性(a是否小于1) s=(2-exp(x))/10; stop=1.0e-5; %迭代的精度 n=0; while a<1&abs(s-x)>=stop&n<=100; x=s %迭代 s=(2-exp(x))/10; n=n+1 end 实验结果: (1)二分法: symbol =1 b =0.50000000000000 n =1 symbol =1 b =0.25000000000000 n =2 symbol =1 b =0.12500000000000 n =3 symbol =0 a =0.06250000000000 n =4 symbol =1 b =0.09375000000000 n =5 symbol =0 a =0.07812500000000 n =6 symbol =1 b =0.09054565429688 n =15 symbol =1 b =0.09053039550781 n =16 symbol =0 a =0.09052276611328 n =17 Xk =0.09052276611328 n =17 (2)迭代法 由x =0.10000000000000 n =1 x =0.08948290819244 n =2 x =0.09063913585958 n =3 x =0.09051261667437 n =4 x =0.09052646805264 n =5 试验结果可见用二分法需要算17次,而用迭代法求得同样精度的解仅用5次,但由于迭代法一般只具有局部收敛性,因此通常不用二分法来求得非线性方程的精确解,而只用它求得根的一个近似解,再用收敛速度较快的迭代法求得其精确解。
(完整版)matlab模糊控制工具箱的使用
matlab模糊控制工具箱的使用 本学期选修了周川老师的智能控制及应用这门课程,大三时候曾上过周老师的英文版的控制工程基础这门课程,比较喜欢周老师上课的风格,智能控制这门课也收获不小,模糊控制是课程中讲到的第一个智能控制算法。 模糊不是真的模糊,模糊是为了精确。模糊控制中涉及到一个隶属度的概念,通常我们认为一个事物属于一个概念与否是确定的,比如数字电路的0与1,但是实际情况或者人们的思维习惯却不是这样的。比如规定18到30岁为青年,那么还差一天到18岁的人算不算青年呢?照规定看不算,但是如果我们加入概率的概念,比如说这个人90%属于青年人,可能更符合人们的思维习惯。 L.A.Zadeh在其《不相容原理》所述:“随着系统的复杂程度不断提高,人们对其精确而有意义地描述的能力不断的降低,以致在达到某一个阈值之后,系统的精确性和复杂性之间呈现出几乎是相互完全排斥的性质”。我们通常所用的控制算法一般是建立在模型比较确定的情况下,而模糊控制不依赖于对象的模型就可以进行控制决策,而且对系统参数变化具有较强的适应性。 对于模糊控制的原理,我不是很清楚,也没有这个心情去搞清楚,感觉知道大概怎么用就可以了。Matlab中集成了模糊控制工具箱,可以使用图像界面进行模糊控制器的设计,极大的简化了设计过程。下面介绍利用模糊工具箱进行控制系统设计的过程。 在matlab的主窗口中输入fuzzy即可调出模糊工具箱界面,退出界面的时候会提示保存,保存格式为fis,如果我们将文件保存为njust.fis,那么下次使用这个文件的时候在主窗口中输入fuzzy njust即可。 模糊控制器的建立过程如下:(1)设定误差E、误差变化率EC和控制量U的论域为,一般为[-6 6]。(2)设定E、EC、U的模糊集。一般可设为{NB、NM、NS、ZO、PS、PM、PB}。(3)设定隶属度函数。有高斯型隶属度函数、三角型隶属度函数等。(4)设定模糊控制规则。常用的模糊控制规则如图1所示,当然可以根据特定的控制对象和要求进行相应的调整。
数学实验“几种常见的求积分近似解的方法”实验报告(内含matlab程序)
西京学院数学软件实验任务书
实验二十一实验报告 一、实验名称:Romberg 积分法,Gauss 型积分法,高斯-勒让德积分法,高斯-切比雪夫积分法,高斯-拉盖尔积分法,高斯-埃尔米特积分法。 二、实验目的:进一步熟悉Romberg 积分法,Gauss 型积分法,高斯-勒让德积分法,高斯-切比雪夫积分法,高斯-拉盖尔积分法,高斯-埃尔米特积分法。 三、实验要求:运用Matlab/C/C++/Java/Maple/Mathematica 等其中一种语言完成程序设计。 四、实验原理: 1.Romberg 积分法: 龙贝格积分法是用里查森外推算法来加快复合梯形求积公式的收敛速度,它的算法如下,其中()i m T 是通过一系列逼近原定积分的龙贝格分值. 计算(0)1[()()]2 b a T f a f b -= + 对1,2,3,k n = ,计算下列各步: 21()(1)1 111 1(21)()[()]222k k k k k j b a j b a T T f a ---=---=++∑
对1,2,,m k = 和,1,2,,1i k k k =-- ,计算111 441 m i i i m m m m T T T --+-=- 随着计算的步骤的增加,()i m T 越来越逼近积分()b a f x dx ?。 2.Gauss 型积分法: 高斯积分公式的思想是用n 个不等距的节点123,,,n x x x x 对被积函数进行插值,然后对插值后的函数进行积分,其积分公式为: 1 1 1 ()()n k k k f x dx A f x -=≈∑? 如果积分区间不是[1,1]-,则需转换到此区间: 11()()222 b a b a b a b a f x dx f t dt ---+= +? ? 其中系数k A 、节点k x 与n 的关系如下表所示: 3.高斯-切比雪夫积分法: 第一类切比雪夫积分形式为: 1 1 ()()n k k k f x dx A f x -=≈∑? 其中k A n π= ,21cos 2k k x n π-= 4.高斯-拉盖尔积分法: 高斯-拉盖尔公式有两种形式: 1 ()()n x k k k e f x dx A f x +∞ -=≈∑?
基于matlab的模糊控制器的设计与仿真
基于MATLAB的模糊控制器的设计与仿真 摘要:本文对模糊控制器进行了主要介绍。提出了一种模糊控制器的设计与仿真的实现方法,该方法利用MA TLB模糊控制工具箱中模糊控制器的控制规则和隶属度函数,建立模型,并进行模糊控制器设计与仿真。 关键词:模糊控制,隶属度函数,仿真,MA TLAB 1 引言 模糊控制是一种特别适用于模拟专家对数学模型未知的较复杂系统的控制,是一种对模型要求不高但又有良好控制效果的控制新策略。与经典控制和现代控制相比,模糊控制器的主要优点是它不需要建立精确的数学模型。因此,对一些无法建立数学模型或难以建立精确数学模型的被控对象,采用模糊控制方法,往往能获得较满意的控制效果。 模糊控制器的设计比一般的经典控制器如PID控制器要复杂,但如果借助MATLAB则系统动态特性良好并有较高的稳态控制精度,可提高模糊控制器的设计效率。本文在MATLAB环境下针对某个控制环节对模糊控制系统进行了设计与仿真。 2 模糊控制器简介 模糊控制器是一种以模糊集合论,模糊语言变量以及模糊推理为数学基础的新型计算机控制方法。显然,模糊控制的基础是模糊数学,模糊控制的实现手段是计算机。本章着重介绍模糊控制的基本思想,模糊控制的基本原理,模糊控制器的基本设计原理和模糊控制系统的性能分析。 随着科学技术的飞速发展,在那些复杂的,多因素影响的严重非线性、不确定性、多变性的大系统中,传统的控制理论和控制方法越来越显示出局限性。长期以来,人们期望以人类思维的控制方案为基础,创造出一种能反映人类经验的控制过程知识,并可以达到控制目的,能够利用某种形式表现出来。而且这种形式既能够取代那种精密、反复、有错误倾向的模型建造过程,又能避免精密的估计模型方程中各种方程的过程。同时还很容易被实现的,简单而灵活的控制方式。于是模糊控制理论极其技术应运而生。 3 模糊控制的特点 模糊控制是以模仿人类人工控制特点而提出的,虽然带有一定的模糊性和主观性,但往往是简单易行,而且是行之有效的。模糊控制的任务正是要用计算机来模拟这种人的思维和决策方式,对这些复杂的生产过程进行控制和操作。所以,模糊控制有以下特点: 1)模糊控制的计算方法虽然是运用模糊集理论进行的模糊算法,但最后得到的控制规律是确定
matlab数学实验报告5
数学实验报告 制作成员班级学号 2011年6月12日
培养容器温度变化率模型 一、实验目的 利用matlab软件估测培养容器温度变化率 二、实验问题 现在大棚技术越来越好,能够将温度控制在一定温度范围内。为利用这种优势,实验室现在需要培植某种适于在8.16℃到10.74℃下能够快速长大的甜菜品种。为达到实验所需温度,又尽可能地节约成本,研究所决定使用如下方式控制培养容器的温度:1,每天加热一次或两次,每次约两小时; 2,当温度降至8.16℃时,加热装置开始工作;当温度达到10.74℃时,加热装置停止工作。 已知实验的时间是冬天,实验室为了其它实验的需要已经将实验室的温度大致稳定在0℃。下表记录的是该培养容器某一天的温度 时间(h)温度(℃)时间(h)温度(℃)09.68 1.849.31 0.929.45 2.959.13 3.878.981 4.989.65 4.988.811 5.909.41 5.908.691 6.839.18 7.008.5217.938.92 7.938.3919.048.66 8.978.2219.968.43 9.89加热装置工作20.848.22 10.93加热装置工作22.02加热装置工作10.9510.8222.96加热装置工作12.0310.5023.8810.59 12.9510.2124.9910.35 13.889.9425.9110.18 三、建立数学模型 1,分析:由物理学中的傅利叶传热定律知温度变化率只取决于温度
差,与温度本身无关。因为培养容器最低温度和最高温度分别是:8.16℃和10.74℃;即最低温度差和最高温度差分别是:8.16℃和10.74℃。而且,16.8/74.10≈1.1467,约为1,故可以忽略温度对温度变化率的影响2, 将温度变化率看成是时间的连续函数,为计算简单,不妨将温度变化率定义成单位时间温度变化的多少,即温度对时间连续变化的绝对值(温度是下降的),得到结果后再乘以一系数即可。 四、问题求解和程序设计流程1)温度变化率的估计方法 根据上表的数据,利用matlab 做出温度-时间散点图如下: 下面计算温度变化率与时间的关系。由图选择将数据分三段,然后对每一段数据做如下处理:设某段数据为{(0x ,0y ),(1x ,1y ),(2x , 2y ),…,(n x ,n y )},相邻数据中点的平均温度变化率采取公式: 温度变化率=(左端点的温度-右端点的温度)/区间长度算得即:v( 2 1i i x x ++)=(1+-i i y y )/(i i x x - +1). 每段首尾点的温度变化率采用下面的公式计算:v(0x )=(30y -41y +2y )/(2x -0x )v(n x )=(3n y -41+n y +2+n y )/(n x -2-n x )
matlab实验报告
实验一小球做自由落体运动内容:一小球竖直方向做自由落体,并无损做往返运动。程序: theta=0:0.01:2*pi x=cos(theta) y=sin(theta) l=1 v=1 while l<10 for t=1:10 y=y+(-1)^l*v*t plot(x,y,[-1,1],[-56,2],'.') axis equal pause(0.1) end l=l+1 end 结果:
-50 -40 -30 -20 -10 收获:通过运用小球自由落体规律,及(-1)^n 来实现无损往 返运动! 实验二 旋转五角星 内容:一个五角星在圆内匀速旋转 程序:x=[2 2 2 2 2 2] y=[0 4/5*pi 8/5*pi 2/5*pi 6/5*pi 0] y1=2*sin(y) x1=2*cos(y) theta=0:4/5*pi:4*pi
x2=2*cos(theta) y2=2*sin(theta) plot(x,y,x1,y1,x2,y2) axis equal theta1=theta+pi/10 x2=2*cos(theta1) y2=2*sin(theta1) plot(x2,y2) axis equal theta=0:4/5*pi:4*pi for rot=pi/10:pi/10:2*pi x=2*cos(theta+rot) y=2*sin(theta+rot) plot(x,y) pause(0.1) end 结果:
-2 -1.5-1-0.500.51 1.52 -2-1.5-1-0.500.511.5 2 收获:通过theta1=theta+pi/10,我们可以实现五角星在圆内匀速 旋转! 实验三 转动的自行车 内容:一辆自行车在圆内匀速转动 程序:x=-4:0.08:4; y=sqrt(16-x.^2); theta1=-pi/2:0.01*pi:3*pi/2; x3=0.5*cos(theta1); y3=0.5*sin(theta1); theta=-pi/2+0.02*pi for k=1:100
922252-人工智能导论第4版试验参考程序-2模糊推理系统实验要求
实验二 模糊推理系统实验 一、实验目的: 理解模糊逻辑推理的原理及特点,熟练应用模糊推理,了解可能性理论。 二、实验原理 模糊推理所处理的事物自身是模糊的,概念本身没有明确的外延,一个对象是否符合这个概念难以明确地确定模糊推理是对这种不确定性,即模糊性的表示与处理。模糊逻辑推理是基于模糊性知识(模糊规则)的一种近似推理,一般采用Zadeh 提出的语言变量、语言值、模糊集和模糊关系合成的方法进行推理。 三、实验条件: Matlab 7.0 的Fuzzy Logic Tool 。 四、实验内容: 1.设计洗衣机洗涤时间的模糊控制。已知人的操作经验为: “污泥越多,油脂越多,洗涤时间越长”; “污泥适中,油脂适中,洗涤时间适中”; “污泥越少,油脂越少,洗涤时间越短”。 要求: (1)设计相应的模糊控制器,给出输入、输出语言变量的隶属函数图,模糊控制规则表和推论结果立体图。 (2)假定当前传感器测得的信息为00 (60,70x y ==污泥)(油脂),采用面积重心法反模糊化,给出模糊推理结果,并观察模糊控制的动态仿真环境,给出模糊控制器的动态仿真环境图。 提示:模糊控制规则如图4-1。其中SD (污泥少)、MD (污泥中)、LD (污泥多)、NG (油脂少)、MG (油脂中)、LG (油脂多)、VS (洗涤时间很短)、S (洗涤时间短)、M (洗涤时间中等)、L (洗涤时间长)、VL (洗涤时间很长)。
2.假设两汽车均为理想状态,即 2Y()4U()20.724s s s s =+??+,Y 为速度,U 为油门控制输入。 (1)设计模糊控制器控制汽车由静止启动,追赶200m 外时速90km 的汽车并与其保持30m 的距离。 (2)在25时刻前车速度改为时速110km 时,仍与其保持30m 距离。 (3)在35时刻前车速度改为时速70km 时,仍与其保持30m 距离。 要求: (1)设计两输入一输出的模糊控制器,给出输入、输出语言变量的隶属函数图,模糊控制规则表,推论结果立体图。 (2)用SIMULINK 仿真两车追赶的模糊控制系统,给出目标车的速度曲线图、油门踩放图、追赶车速度图、与前车相对距离图。 五、实验报告要求: 1.分析隶属度、模糊关系和模糊规则的相互关系。 2.按照实验内容,给出相应结果。
通过算例熟悉MATLAB模糊控制工具箱
通过算例熟悉MATLAB模糊控制工具箱 设计一个二维模糊控制器控制一个一阶被控对象 1 () 1 G s Ts = + ,然后改变控制对象参 数的大小,观察模糊控制的鲁棒性。 1、模糊推理的五个步骤 1)输入变量的模糊化 这是模糊推理的第一步,是获取输入变量,并确定它们的隶属函数,从而确定属于每个模糊集合的隶属度。 2) 应用模糊算子 完成了输入模糊化,就知道了对于每个模糊规则,前提中每一个部分被满足的程度。如果一个给定规则的前提有多个部分,则要应用模糊算子来获得一个数值,这个数值表示前提对于该规则的满足程度。 3) 应用推理方法 推理的类型有mamdani和sugeno 推理。Mamdani推理法是一种在模糊控制中普遍使用的方法,它本质上仍然是一种合成推理方法,只不过对模糊蕴涵关系取不同的形式而已。Mamdani型推理,从每个规则的结果中得到的模糊集通过聚类运算后得到结果模糊集,被反模糊化后得到系统输出。Sugeon型推理:其中每个规则的结果是输入的线性组合,而输出是结果的加权线性组合。 4) 输出的聚类 由于决策是在对模糊推理系统中所有规则进行综合考虑的基础上做出的,因此必须以某种方式将规则结合起来以做出决策。聚类就是这样一个过程,它将表示每个规则输出的模糊集结合成一个单独的模糊集。聚类方法有max,probor(概率乘),sum。其中,sum执行的是各规则输出集的简单相加。 5) 解模糊化 解模糊化过程也叫反模糊化过程,它的输入是一个模糊集,既上一步的聚类输出模糊集,其输出为一个单值。模糊集的聚类中包含很多输出值,因此必须进行反模糊化,以从集合中解析出一个单输出值。 2、模糊逻辑工具箱的介绍 模糊逻辑工具箱提供的图形用户界面(GUI)工具有五个:模糊推理系统(FIS)编辑器;隶属函数编辑器;模糊规则编辑器;模糊规则观察器;输出曲面观察器。 1)FIS编辑器: Matlab的FIS界面如图1所示。FIS处理系统有多少个输入变量,输出变量,名称是什么,模糊算子“与”(min,prod乘积,custom自定义),“或”(max大,probor 概率统计方法,custom),推理方法(min,prod,custom),聚类方法(max,probor,sum,custom),解模糊的方法(centroid质心法,bisector中位线法,middle of maximum,largest of maximum,smallest of maximum)。
MATLAB实验报告
数字信号处理及MATLAB 实验报告 班级: 学号: 姓名:
4.7.2 例4,2 设x(n)是由两个正弦信号及白噪声的叠加,试用FFT文件对其作频谱分析。程序清单 %产生两个正弦加白噪声 N=256; f1=.1;f2=.2;fs=1; a1=5;a2=3; w=2*pi/fs; x=a1*sin(w*f1*(0:N-1))+a2*sin(w*f2*(0:N-1))+randn(1,N); %应用FFT求频谱 subplot(2,2,1); plot(x(1:N/4)); title('原始信号'); f=-0.5:1/N:0.5-1/N; x=fft(x); y=ifft(x); subplot(2,2,2); plot(f,fftshift(abs(x))); title('频域信号'); subplot(2,2,3); plot(real(x(1:N/4))); title('时域信号');
例4.3 设x(n)为长度N=6的矩形序列,用MATLAB程序分析FFT取不同长度时x(n)频谱的变化。N=8,32,64,时x(n)的FFT MATLAB实现程序如下。 x=[1,1,1,1,1,1]; N=8; y1=fft(x,N); n=0:N-1; subplot(3,1,1);stem(n,abs(y1),'.k');axis([0,9,0,6]); N=32; y2=fft(x,N); n=0:N-1; subplot(3,1,2);stem(n,abs(y2),'.k');axis([0,40,0,6]); N=64; y3=fft(x,N); subplot(3,1,3);stem(n,abs(y3),'.k');axis([0,80,0,6]);
参考答案Matlab实验报告
实验一 Matlab基础知识 一、实验目的: 1.熟悉启动和退出Matlab的方法。 2.熟悉Matlab命令窗口的组成。 3.掌握建立矩阵的方法。 4.掌握Matlab各种表达式的书写规则以及常用函数的使 用。 二、实验内容: 1.求[100,999]之间能被21整除的数的个数。(rem) 2.建立一个字符串向量,删除其中的大写字母。(find) 3.输入矩阵,并找出其中大于或等于5的元素。(find) 4.不采用循环的形式求出和式 63 1 2i i= ∑ 的数值解。(sum) 三、实验步骤: ●求[100,199]之间能被21整除的数的个数。(rem) 1.开始→程序→Matlab 2.输入命令: ?m=100:999; ?p=rem(m,21); ?q=sum(p==0) ans=43 ●建立一个字符串向量,删除其中的大写字母。(find) 1.输入命令:
?k=input('’,’s’); Eie48458DHUEI4778 ?f=find(k>=’A’&k<=’Z’); f=9 10 11 12 13 ?k(f)=[ ] K=eie484584778 ●输入矩阵,并找出其中大于或等于5的元素。(find) 1.输入命令: ?h=[4 8 10;3 6 9; 5 7 3]; ?[i,j]=find(h>=5) i=3 j=1 1 2 2 2 3 2 1 3 2 3 ●不采用循环的形式求出和式的数值解。(sum) 1.输入命令: ?w=1:63; ?q=sum(2.^w) q=1.8447e+019
实验二 Matlab 基本程序 一、 实验目的: 1. 熟悉Matlab 的环境与工作空间。 2. 熟悉M 文件与M 函数的编写与应用。 3. 熟悉Matlab 的控制语句。 4. 掌握if,switch,for 等语句的使用。 二、 实验内容: 1. 根据y=1+1/3+1/5+……+1/(2n-1),编程求:y<5时最大n 值以及对应的y 值。 2. 编程完成,对输入的函数的百分制成绩进行等绩转换,90~100为优,80~89为良,70~79为中,60~69为及格。 3. 编写M 函数文件表示函数 ,并分别求x=12和56时的函数值。 4. 编程求分段函数 2226;03 56;0532 1;x x x x y x x x x x x x +-<≠=-+≤<≠≠-+且且及其它,并求输入x=[-5.0,-3.0,1.0,2.0,2.5,3.0,3.5]时的输出y 。 三、 实验步骤: 根据y=1+1/3+1/5+……+1/(2n-1),编程求:y<5时最大n 值以及对应的y 值。 1. 打开Matlab ,新建M 文件 2. 输入命令: 51022-+x
MATLAB模糊逻辑工具箱及函数调用方法
4 MATLAB模糊工具箱介绍 Fuzzy Logic工具箱功能非常强大,利用它人们可以方便地建立模糊逻辑推理系统,并对其进行测试。这里我们主要介绍它提供的5个图形化的系统设计工具。 4.1模糊推理系统编辑器 启动模糊推理系统编辑器(FISE, Fuzzy Inference SystemEditer)的方法有两种,在MATLAB的命令窗口中输入“fuzzy”命令或者依次点击MATLAB软件左下角的“Start”,“Toolboxes”,“Fuzzy Logic”也可打开FISE,然后双击FIS Editor Viewer项。FISE的图形界面如下图14示。 图1FISE图形界面 4.2隶属函数编辑器 在MATLAB的命令界面输入“mfedit”命令或者在模糊推理系统编辑器的“File” “Edit/Membership Functions”或者双击图14中红色矩形,都可打开隶属函数编辑器。通过该编辑器可以设定和变更输入/输出语言变量的各自的语言值的隶属函数的类型及参数。如下图15所示。 图2隶属函数编辑器界面 4.3模糊规则编辑器 在MATLAB的命令界面中输入“ruleedit”命令或者利用模糊推理系统编辑
器的“File” “Edit/Rules”或双击图2里红色框旁的黑色的矩形框,都可以打开模糊规则编辑器。通过该编辑器可以添加、修改和删除必要的模糊规则,其空白界面如下图3所示。 图3模糊规则编辑器界面 4.4模糊规则观察器 在MATLAB的命令界面输入“ruleview”命令,或者在前面介绍的三种编辑器中的任一个中选择相应的“View/Rules”,均可打开模糊规则观察器。在模糊规则观察器中,以图形形式描述了模糊推理系统的推理过程,如下图4所示。 图4模糊规则浏览器界面 4.5模糊推理输入输出变量特性观察器 在MATLAB的命令窗口中输入“surfview”命令,或者在各个编辑器窗口选择相应菜单“View/Surface”,都可打开模糊推理输入输出曲面浏览器。该窗口用三维图形展示出输入与输出变量的曲面特性,如下图5所示。
浅析Matlab数学实验报告
数学实验报告 姓名: 班级: 学号: 第一次实验任务 过程: a=1+3i; b=2-i; 结果: a+b =3.0000 + 2.0000i a-b =-1.0000 + 4.0000i a*b = 5.0000 + 5.0000i a/b = -0.2000 + 1.4000i 过程: x=-4.5*pi/180; y=7.6*pi/180; 结果: sin(abs(x)+y)/sqrt(cos(abs(x+y))) =0.2098 心得:对于matlab 中的角度计算应转为弧度。 (1)过程: x=0:0.01:2*pi; y1=sin(x); y2=cos(x); y3=exp(x); y4=log(x); plot(x,y1,x,y2,x,y3,x,y4) plot(x,y1,x,y2,x,y3,x,y4) 结果: (2)过程:>> subplot(2,2,1) >> plot(x,y1) >> subplot(2,2,2) >> plot(x,y2) ./,,,,2,311b a b a b a b a i b i a ?-+-=+=计算、设有两个复数 6,7,5.4)
cos()sin(2=-=++y x y x y x ,其中、计算的图形。 下分别绘制)同一页面四个坐标系)同一坐标系下(、在( x y e y x y x y x ln ,,cos ,sin 213==== >> subplot(2,2,3) >> plot(x,y3) >> subplot(2.2.4) >> subplot(2,2,4) >> plot(x,y4) 结果: 心得:在matlab中,用subplot能够实现在同一页面输出多个坐标系的图像,应注意将它与hold on进行区别,后者为在同一坐标系中划出多条曲线。 5、随机生成一个3x3矩阵A及3x2矩阵B,计算(1)AB,(2)对B中每个元素平方后得到的矩阵C,(3)sinB,(4)A的行列式,(5)判断A是否可逆,若可逆,计算A的逆矩阵,(6)解矩阵方程AX=B,(7)矩阵A中第二行元素加1,其余元素不变,得到矩阵D,计算D。 过程:A=fix(rand(3,3).*10) ; B=fix(rand(3,3).*10);
matlab实验报告
Matlab实验报告 实验二图像处理 一、实验目的 (1)通过应用MA TLAB语言编程实现对图像的处理,进一步熟悉MATLAB软件的编程及应用; (2)通过实验进一步掌握图像处理的基本技术和方法。 二、实验内容及代码 ㈠.应用MA TLAB语言编写显示一幅灰度图像、二值图像、索引图像及彩色图像的程序,并进行相互之间的转换 首先,在matlab页面中的current directory下打开存放图像的文件夹。 1.显示各种图像 ⑴显示彩色图像: ①代码:>> mousetif=imread('tif.TIF'); >> image(mousetif) 显示截图: ②代码:>> mousetif=imread('tif.TIF'); >> imshow(mousetif) 显示截图:
③代码:mousetif=imread('tif.TIF'); subimage(mousetif) 显示截图: 显示截图:
⑵显示二值图像 ①代码:>> I=imread('单色bmp.bmp'); >> imagesc(I,[0 2]) 显示截图: ②代码:>> I=imread('单色bmp.bmp');
>> imshow(I,2) 显示截图: ③代码:>> I=imread('单色bmp.bmp'); >> subimage(I) 显示截图:
⑶显示灰度图像 ①代码:>> I1=imread('256bmp.bmp'); >> imagesc(I1,[0,256]) 显示截图: 代码:>> I1=imread('256bmp.bmp'); >> colormap(gray); >> subplot(1,2,1); >> imagesc(I1,[0,256]); >> title('灰度级为[0 256]的mouse.bmp图'); >> subplot(1,2,2); >> imagesc(I1,[0,64]); >> colormap(gray); >> title('灰度级为[0 64]的mouse.bmp图'); 显示截图:
模糊控制系统及其MATLAB实现
模糊控制系统及其MATLAB实现 1. 模糊控制的相关理论和概念 1.1 模糊控制的发展 模糊控制理论是在美国加州伯克利大学的L.A.Zadeh教授于1965 年建立的模 糊集合论的数学基础上发展起来的。之后的几年间Zadeh又提出了模糊算法、模糊 决策、模糊排序、语言变量和模糊IF-THEN规则等理论,为模糊理论的发展奠定了 基础。 1975年,Mamdani和Assilian创立了模糊控制器的基本框架,并用于控制蒸 汽机。 1978年,Holmblad和Ostergaard为整个工业过程开发出了第一个模糊控制器——模糊水泥窑控制器。 20世纪80年代,模糊控制开始在工业中得到比较广泛的应用,日本仙台地铁 模糊控制系统的成功应用引起了模糊领域的一场巨变。到20世纪90年代初,市场 上已经出现了大量的模糊消费产品。 近30 年来, 因其不依赖于控制对象的数学模型、鲁棒性好、简单实用等优点, 模糊控制已广泛地应用到图像识别、语言处理、自动控制、故障诊断、信息并且渗透到社会科学和检索、地震研究、环境预测、楼宇自动化等学科和领域, 自然科学许多分支中去, 在理论和实际运用上都取得了引人注目的成果。 1.2 模糊控制的一些相关概念 用隶属度法来定义论域U中的集合A,引入了集合A的0-1隶属度函数, 用,()x表示,它满足: A xA,1, ,x(),,AxA,0,
用0-1之间的数来表示x属于集合A的程度,集合A等价与它的隶属度函 数,()x A 模糊系统是一种基于知识或基于规则的系统。它的核心就是由所谓的IF-THEN 规则所组成的知识库。一个模糊的IF-THEN规则就是一个用连续隶属度函数对所描述的某些句子所做的IF-THEN形式的陈述。例如: 如果一辆汽车的速度快,则施加给油门的力较小。 这里的“快”和“较小”分别用隶属度函数加以描述。模糊系统就是通过组合IF-THEN规则构成的。 构造一个模糊系统的出发点就是要得到一组来自于专家或基于该领域知识的模糊IF-THEN规则,然后将这些规则组合到单一系统中。不同的模糊系统可采用不用的组合原则。 用隶属度函数表征一个模糊描述后,实质上就将模糊描述的模糊消除了。 模糊控制系统设计的关键在于模糊控制器的设计。模糊控制器的设计主要有三个部分: (1) 输入量的模糊化 所谓模糊化(Fuzzification) 就是先将某个输入测量量的测量值作标准化处理,把该输入测量量的变化范围映射到相应论域中,再将论域中的各输入数据以相应的模糊语言值的形式表示,并构成模糊集合。这样就把输入的测量量转换为用 隶属度函数表示的某一模糊语言变量。 (2) 模糊逻辑推理 根据事先已定制好的一组模糊条件语句构成模糊规则库,运用模糊数学理论对 模糊控制规则进行推理计算,从而根据模糊控制规则对输入的一系列条件进行综合评估,以得到一个定性的用语言表示的量,即模糊输出量。完成这部分功能的过程就是模糊逻辑推理过程。