(完整版)大学物理授课教案第十二章机械振动
第四篇 振动与波动
第十二章 机械振动
§12-1简谐振动
1、弹簧振子运动
如图所取坐标,原点O 在m 平衡位置。现将m 略向右移到A ,然后放开,此时,由于弹簧伸长而出现指向平衡位置的弹性力。在弹性 力作用下,物体向左运动,当通过位置O 时,作用 在m 上弹性力等于0,但是由于惯性作用,m 将继续向 O 左边运动,使弹簧压缩。此时,由于弹簧被压缩, 而出现了指向平衡位置的弹性力并将阻止物体向左 运动,使m 速率减小,直至物体静止于B (瞬时静 止),之后物体在弹性力作用下改变方向,向右运动。
这样在弹性力作用下物体左右往复运动,即作机械振动。 图12-1 2、简谐振动运动方程
由上分析知,m 位移为x :
kx F -= (12-1) 式中: 当0>x 即位移沿+x 时,F 沿-x ,即0
m F a =
m kx -= (m 为物体质量)
∵22dt x
d a = ∴02
2=+x m k dt x d ∵k 、m 均大于0,∴可令 2
ω=m k
可有:
2
2
2
=
+x
dt
x
d
ω
(12-2)式(12-2)是谐振动物体的微分方程。它是一个常系数的齐次二阶的线性微分方程,它的解为
()'
sin?
ω+
=t
A
x
或
()?
ω+
=t
A
x cos (12-4)
?
?
?
?
?
-
=
2
'
π
?
?
式(12-3)(12-4)是简谐振动的运动方程。因此,我们也可以说位移是时间t的正弦或余弦函数的运动是简谐运动。本书中用余弦形式表示谐振动方程。
3、谐振动的速度和加速度
物体位移:
()?
ω+
=t
A
x cos
速度:
()?
ω
ω+
-
=
=t
A
dt
dx
V sin
(12-5) 加速度:
()x
t
A
dt
x
d
a2
2
2
2
cosω
?
ω
ω-
=
+
-
=
=
(12-6) 可知:
A
Vω
=
max
A
a2
max
ω
=
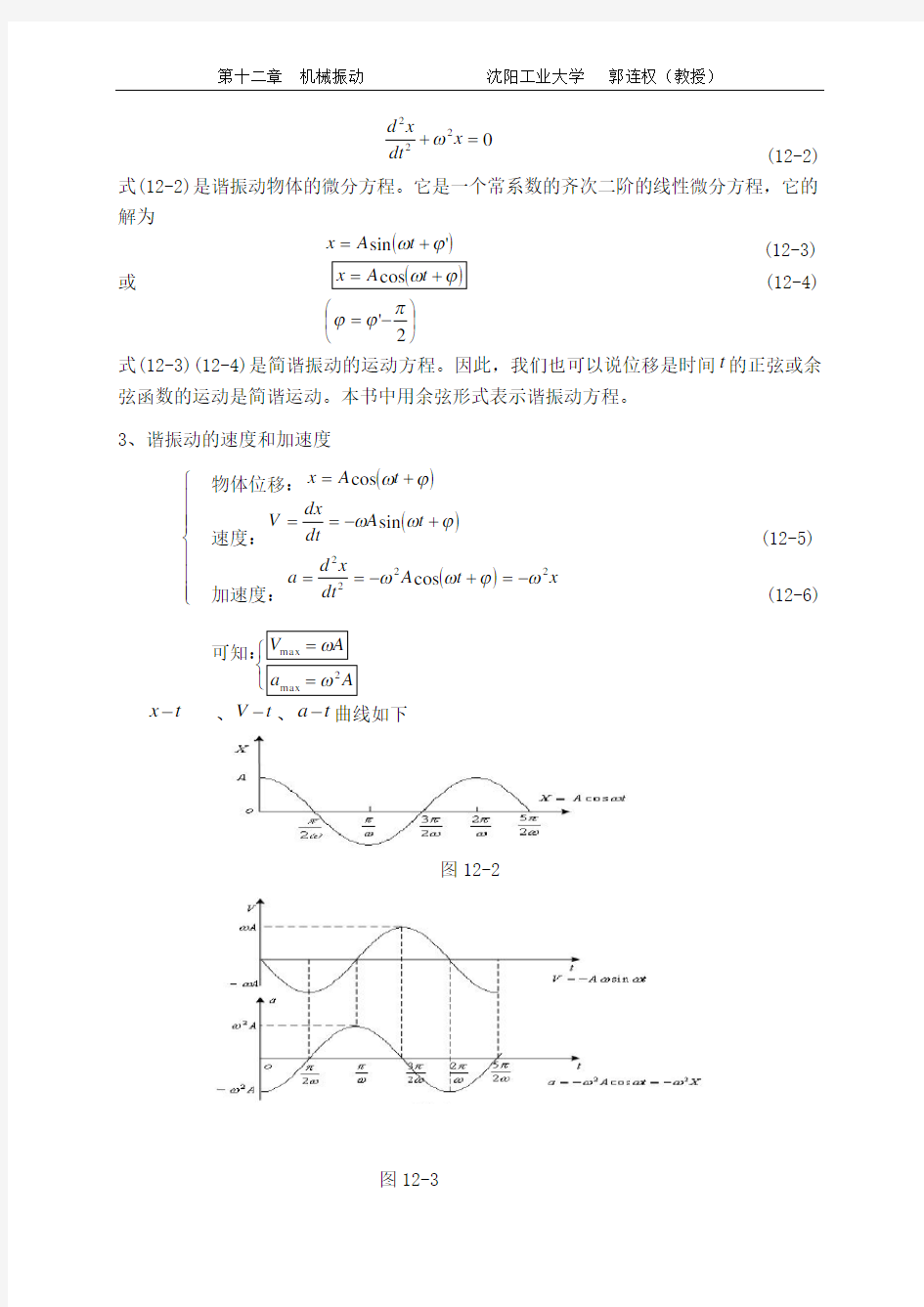
t
x-、t
V-、t
a-曲线如下
图12-2
图12-3
?
?
?
?
??
?
?
?
?
?
?
说明:(1)kx F -=是谐振动的动力学特征;
(2)
x a 2
ω-=是谐振动的运动学特征; (3)做谐振动的物体通常称为谐振子。
§12-2 谐振动的振幅 角频率 位相
上节我们得出了谐振动的运动方程()?ω+=t A x cos ,现在来说明式中各量意义。 1、振幅
做谐振动的物体离开平衡位置最大位移的绝对值称为振幅,记做A 。A 反映了振动的强弱。
2、角频率(圆频率)
为了定义角频率。首先定义周期和频率。
物体作一次完全振动所经历的时间叫做振动的周期,用T 表示;
在单位时间内物体所作的完全振动次数叫做频率,用v 表示。
由上可知:
T v 1=
或 v T 1
=
∵T 为周期,∴()()[]?ω?ω++=+=T t A t A x cos cos
∵从t 时刻经过1个周期时,物体又首次回到原来t 时刻状态,∴πω2=T (余弦函数周期为π2)
? v
T ππ
ω22==
可见:ω表示在π2秒内物体所做的完全振动次数,ω称为角频率(圆频率)
∵
m k =
ω ∴ k m
T π
ωπ
22==
m k v ππω212==
对于给定的弹簧振子,m 、k 都是一定的,所以T 、v 完全由弹簧振子本身的性质
所决定,与其它因素无关。因此,这种周期和频率又称为固有周期和固有频率。 3、位相
在力学中,物体在某一时刻的运动状态由位置坐标和速度来决定,振动中,当A 、
?????
ω给定后,物体的位置和速度取决于()?ω+t ,()?ω+t 称为位相(或周相、相位)。 由上可见,位相是决定振动物体运动状态的物理量。?是0=t 时的位相,称为初相。 4、A 、?的确定
对于给定的系统,ω已知,初始条件给定后可求出A 、?。
初始条件:0=t 时 0
x x = 由x 、v 表达式有 0v v = ?cos 0A x = ?ωsin 0A v -= 即
?cos 0A x = ?ωsin 0A v =???
??-
? 0x tg ων?-=即
00
x v
arctg ω?-= (12-6)
220
20
ωv x A +
= (12-7)
?值所在象限:
1)00>x ,00
0>x ,
0>v :?在第Ⅳ象限
5、两个谐振动物体在同一时刻位相差
设物体1和2的谐振动方程为 图 12-4 ()1111cos ?ω+=t A x
()2222cos ?ω+=t A x
任意t 时刻二者位相差为
()()[]()()12121122??ωω?ω?ω?-+-=+-+=?t t t
0>:2的位相比1超前 0=:2、1同位相 0<:2的位相比1落后
?
?
?
?
???
??
??????
例12-1:如图所示,一弹簧振子在光滑水平面上,已知m N k /60.1=,kg m 40.0=,试
求下列情况下m 的振动方程。
(1)将m 从平衡位置向右移到m x 10.0=处由静止释放;
(2)将m 从平衡位置向右移到m x 10.0=处并给以m 向左的速率为s m /20.0。 解:(1)m 的运动方程为
()?ω+=t A x cos
由题意知:
s m k /240.060.1===
ω
初始条件:0=t 时,m x 10.00=,0
0=v
可得:
m
v x A 10.0010.022
20
2
=+=+
=ω 图12-5
00
arctg x v arctg
=-=ω?
∵00>x ,00=v ,∴ο
0=? ? ()m t x 2cos 10.0=
2) 初始条件:0=t 时,m x 10.00=,s
m v /20.00-=
()m
v x A 21.0220
.010.022
22
2
2
0=-+
=
+
=ω
1
10.0220.000arctg arctg x v arctg =???
???--=-=ω?
∵00>x ,00 4π?= ? m t x ??? ?? +=42cos 21.0π 可见:对于给定的系统,如果初始条件不同,则振幅和初相就有相应的改变。 例12-2:如图所示,一根不可以伸长的细绳上端固定,下端系一小球,使小球稍偏离平 衡位置释放,小球即在铅直面内平衡位置附近做振动,这一系统称为单摆。 (1)证明:当摆角θ很小时小球做谐振动; (2)求小球振动周期。 证:(1)设摆长为l ,小球质量为m ,某时刻小球悬线与铅 直线夹角为θ,选悬线在平衡位置右侧时,角位移θ为正,由 转动定律: αJ M = 有 ()2 22sin dt d ml l mg θθ=- 图12-6 即 0sin 22=+θθl g dt d ∵θ很小。∴0sin ≈θ ? 02 2=+θθl g dt d ∵这是谐振动的微分方程(或α与θ正比反向) ∴小球在做谐振动。 (2) g l l g T π πωπ 222== = (注意做谐振动时条件,即θ很小) §12-3 表示谐振动的旋转矢量方法 在中学中,为了更直观更方便地研究三角函数,引进了单位圆的图示法,同样,在此为了更直观更方便地研究简谐振动,来引进旋转矢量的图示法。 一、旋转矢量 自ox 轴的原点o 作一矢量A ? ,其模 为简谐振动的振幅A ,并使A ? 在图面内 绕o 点逆时针转动,角速度大小为谐振动 角频率ω,矢量A ρ 称为旋转矢量。 二、简谐振动的旋转矢量表示法 图12-7 (1)旋转矢量A ?的矢端M 在x 轴上投影坐标可表示为x 轴上的谐振动,振幅为A ? (2)旋转矢量A ? 以角速度ω旋转一周,相当于谐振动物体在x 轴上作一次完全振动,即旋转矢量旋转一周,所用时间与谐振动的周期相同。 (3)0=t 时刻,旋转矢量与x 轴夹角?为谐振动的初相,t 时刻旋转矢量与x 轴夹角()?ω+t 为t 时刻谐振动的位相。 说明:(1)旋转矢量是研究谐振动的一种直观、简便方法。 (2)必须注意,旋转矢量本身并不在作谐振动,而是它矢端在x 轴上的投影点在x 轴上做谐振动。 旋转矢量与谐振动t x -曲线的对应关系(设0=?) 图12-8 三、旋转矢量法应用举例 例12-3: 一物体沿x 轴作简谐振动,振幅为m 12.0,周期为s 2。0=t 时,位移为m 06.0, 且向x 轴正向运动。 (1)求物体振动方程; (2)设1t 时刻为物体第一次运动到m x 06.0-=处,试求物体从1t 时刻运动到平衡位置所用最短时间。 解:(1)设物体谐振动方程为 ()?ω+=t A x cos 由题意知 m A 12.0= 12 22-===S T πππω ?=? 〈方法一〉用数学公式求? ?cos 0A x = ∵m A 12.0=,m x 06.00= ∴ 21cos =? ? 3π ?± = ∵0sin 0>-=?ωA v ∴ 3π ?- = ? m t x ??? ?? -=3cos 12.0ππ 〈方法二〉用旋转矢量法求? 根据题意,有如左图所示结果 ∴ 3π ?- = 图12-9 ? m t x ??? ?? -=3cos 12.0ππ ?? ? ? ? 由上可见,〈方法二〉简单 (2)〈方法一〉用数学式子求t ? 由题意有:()??? ??-=-3cos 12.006.01ππt (∵πωω21= ? πππ3231=-t 或 π34 ∵此时0 3sin 11 --=ππωt A v ∴ ππ π32 31=- t ? s t 11= 设2t 时刻物体从1t 时刻运动后首次到达平衡位置, 有:? ?? ?? -=3cos 12.002ππt ? 23 2π π π= - t 或π23 (∵πω22 ∵0 3sin 22>??? ?? --=ππωt A v ∴ ππ π23 32=- t ? s t 6112= s t t t 65 161112=-=-=? 〈方法二〉用旋转矢量法求t ? 由题意知,有左图所示结果,M 1为1t 时刻A ? 末端位置,M 2为2t 时刻A ? 末端位置。从 21t t -内A ? 转角为 ()π ππω?65 232112=+=∠=-=?OM M t t ? s t t t 65 656512=?==-=?ππωπ 显然〈方法二〉简单。 图12-10 例12-4:图为某质点做谐振动的t x -曲线。求振动方程。 解:设质点的振动方程为()?ω+=t A x cos 由图知: cm A 10= 1222-===s T πππω ??? ? ? 图12-11 用旋转矢量法(见上页图)可知,2 π ?- = (或 π 2 3 ) ? cm t x? ? ? ? ? - = 2 cos 10 π π 例12-5:弹簧振子在光滑的水平面上做谐振动,A为振幅,0 = t时刻情况如图所示。O 为原点。试求各种情况下初相。 图12-12 §12-4 谐振动的能量 对于弹簧振子,系统的能量E=k E(物体动能)+p E (弹簧势能) 已知:物体位移 ()? ω+ =t A x cos 物体速度 ()? ω ω+ - =t A v sin ? 2 2 2 1 2 1 kx mv E E E p k + = + = ? ? ? ()[]()[]22cos 21sin 21?ω?ωω+++-?= t A k t A m ()()?ω?ωω+++=t kA t A m 22222cos 21 sin 21 )(2 k m =ω ()()[] ?ω?ω+++=t t kA 222cos sin 21 2 21kA = 2 2221 21A m kA E ω== (11-8) 说明:(1)虽然k E 、p E 均随时间变化,但总能量p k E E E +=且为常数。原因是系 统只有保守力作功,机械能要守恒。 (2)k E 与p E 互相转化。当0=x 时,0=p E ,E E E k k ==max 。在A x =处, 0=k E ,E E E p p ==max 。 例12-6:一物体连在弹簧一端在水平面上做谐振动,振幅为A 。试求p k E E 21=的位置。 解:设弹簧的倔强系数为k ,系统总能量为 2 21 kA E E E p k =+= 在 p k E E 21=时,有 2 21 2323kx E E E p p k ?==+ ? 222143kA kx = ∴ A x 32±= 例12-7:如图所示系统,弹簧的倔强系数m N k /25=,物块kg m 6.01=,物块kg m 4.02=, 1m 与2m 间最大静摩擦系数为5.0=μ,1m 与地面间是光滑的。现将物块拉离平 衡位置,然后任其自由振动,使2m 在振动中不致从1m 上滑落,问系统所能具 有的最大振动能量是多少。 解:系统的总能量为 2 21kA E = 2 max 21 kA E E k ==(此时0=p E ) 2m 不致从1m 上滑落时,须有 μg m a m 22≤ 图12-13 极限情况 2 max ωμA g a == 即 ()k m m g g A 21 2+?==μωμ ? ()k g m m k m m g k E k 2 22212 21max 2121μμ+=??? ??+?= ()J 48.0255.08.94.06.021222=??+= §12-5 同方向同频率两谐振动合成 一个物体可以同时参与两个或两个以上的振动。如:在有弹簧支撑的车厢中,人坐在车厢的弹簧垫子上,当车厢振动时,人便参与两个振动,一个为人对车厢的振动,另一个为车厢对地的振动。又如:两个声源发出的声波同时传播到空气中某点时,由于每一声波都在该点引起一个振动,所以该质点同时参与两个振动。在此,我们考虑一质点同时参与两个在同一直线的同频率的振动。 取振动所在直线为x 轴,平衡位置为原点。振动方程为 ()111cos ?ω+=t A x ()222cos ?ω+=t A x 1A 、2A 分别表示第一个振动和第二个振动的振幅;1?、2?分别表示第一个振动和第二个振动的初相。 ω是两振动的角频率。由于1x 、2x 表示同一直线上距同一平衡位置的位移,所以合成振动的位移x 在同一直线上,而且等于上述两分振动位移的代数和,即 21x x x += 为简单起见,用旋转矢量法求分振动。 图12-14 图12-15 如图所示,0=t 时,两振动对应的旋转矢量为1A ?、2A ?,合矢量为21A A A ???+=。∵1A ? 、2A ?以相同角速度ω转动,∴转动过程中1A ?与2A ?间夹角不变,可知A ?大小不变,并且A ?也 ?? ??? 以ω转动。任意时刻t ,A ? 矢端在x 轴上的投影为: 21x x x += 因此,合矢量A ?即为合振动对应的旋转矢量,A 为合振动振幅,?为合振动初相。 合振动方程为: ()?ω+=t A x cos (仍为谐振动) 由图中三角形21M OM 知: ()12212 221cos 2??-++= A A A A A (12-9) 由图中三角形OMP 知: OP PM A A A A tg = ++=22112211cos cos sin sin ????? (12-10) 讨论:(1)π??k 212=- ),2,1,0(???±±=k 时(称为位相相同)? 21A A A += (2)()π??1212+=-k ),2,1,0(???±±=k 时(称为位相相反)? 2 1A A A -= 例12-8:有两个同方向同频率的谐振动,其合成振动的振幅为m 2.0,位相与第一振动的位相差为6π ,若第一振动的振幅为m 1 103-?,用振幅矢量法求第二振动的振幅及第一、第二两振动位相差。 解:(1)?2=A () 6cos 2.010322.01036cos 2122 112212ππ???-+?=-+=--A A A A A m 1.0= (2)∵22 2 12 A A A += ∴ 212π ??= - 图12-16 例11-9:一质点同时参与三个同方向同频率的谐振动,他们的振动方程分别为 t A x ωcos 1=,??? ??+=3cos 2πωt A x ,? ?? ? ? +=πω32cos 3t A x ,试用振幅矢量方法求合振动方程。 解:如左图, 3π ?= (1A ?、2A ρ、3A ?、A ? 构成一等腰梯形) A A A A A A 23cos 2cos 221=+=+=π ? ? ? ?? ?? +=3cos 2πωt A x 图12-17