基于局部学习的遥感图像融合
遥感图像融合方法比较
1 绪论 1.1研究目的及意义 20世纪90年代中后期以后,搭载许多新型传感器的卫星相继升空,使得同一地区的遥感数据影像数目不断增多。如何有效地利用这些不同时相、不同传感器、不同分辨率的遥感数据便成为了遥感工作者研究的瓶颈问题,然而解决这一问题的关键技术就是遥感影像数据融合。 遥感数据融合就是对多个遥感器的图像数据和其他信息的处理过程,它着重于把那些在空间或时间上冗余或互补的多源数据,按一定法则(算法)进行处理,获得比单一数据更精确、更丰富的信息,生成一幅具有新的空间、波谱和时间特征的合成图像。 遥感是不同空间、时间、波谱、辐射分辨率提供电磁波谱不同谱段的数据。由于成像原理不同和技术条件的限制,任何一个单一遥感器的遥感数据都不能全面的反映目标对象的特征,也就是有一定的应用范围和局限性。各类非遥感数据也有它自身的特点和局限性。影像数据融合技术能够实现数据之间的优势互补,也能实现遥感数据与地理数据的有机结合。数据融合技术是一门新兴的技术,具有十分广阔的应用前景。所以,研究遥感影像数据融合方法是非常必要的。 1.2研究现状及发展的趋势 1.2.1研究现状 20世纪美国学者提出“多传感器信息融合”的概念认为在多源遥感影像数据中能够提取出比单一遥感影像更丰富、更有效、更可靠的信息。之后由于军事方面的要求,使得遥感影像数据融合技术得到了很大的发展,美、英,德等国家已经研制出了实用的遥感数据融合处理的系统和软件,同时进行了商业应用。 1)、融合结构 融合的结构可分为两类:集中式和分布式。集中式融合结构:各传感器的观测数据直接被送到中心,进行融合处理,用于关联、跟踪、识别等。分布式融合结构:每个传感器独立完成关联、识别、跟踪,然后由融合中心完成配准、多源关联的融合。 2)、融合的层次 图像融合可分为:像元级融合、特征级融合和决策级融合。 像元级融合是最低级的信息融合,可以在像素或分辨单位上进行,又叫做数据级融合。它是对空间配准的遥感影像数据直接融合,然后对融合的数据进行特征提取和属性说明。 特征级融合是由各个数据源中提取特征信息进行综合分析和处理的过程,是中间层次的融合。特征级融合分为目标状态信息融合和目标特征融合。 决策级融合是在信息表示的最高层次上进行融合处理。首先将不同传感器观测同一目标获得的数据进行预处理、特征提取、识别,以建立对所观测目标的初步理论,然后通过相关处理、决策级融合判别,最终获得联合推断结果,从而为决策提供依据。
机器视觉与图像处理方法
图像处理及识别技术在机器人路径规划中的一种应用 摘要:目前,随着计算机和通讯技术的发展,在智能机器人系统中,环境感知与定位、路径规划和运动控制等功能模块趋向于分布式的解决方案。机器人路径规划问题是智能机器人研究中的重要组成部分,路径规划系统可以分为环境信息的感知与识别、路径规划以及机器人的运动控制三部分,这三部分可以并行执行,提高机器人路径规划系统的稳定性和实时性。在感知环节,视觉处理是关键。本文主要对机器人的路径规划研究基于图像识别技术,研究了图像处理及识别技术在路径规划中是如何应用的,机器人将采集到的环境地图信息发送给计算机终端,计算机对图像进行分析处理与识别,将结果反馈给机器人,并给机器人发送任务信息,机器人根据接收到的信息做出相应的操作。 关键词:图像识别;图像处理;机器人;路径规划 ABSTRACT:At present, with the development of computer and communication technology, each module, such as environment sensing, direction deciding, route planning and movement controlling moduel in the system of intelligent robot, is resolved respectively. Robot path planning is an part of intelligent robot study. The path planning system can be divided into three parts: environmental information perception and recognition, path planning and motion controlling. The three parts can be executed in parallel to improve the stability of the robot path planning system. As for environment sensing, vision Proeessing is key faetor. The robot path planning of this paper is based on image recognition technology. The image processing and recognition technology is studied in the path planning is how to apply, Robots will sent collected environment map information to the computer terminal, then computer analysis and recognize those image information. After that computer will feedback the result to the robot and send the task information. The robot will act according to the received information. Keywords: image recognition,image processing, robot,path planning
多聚焦图像融合方法综述
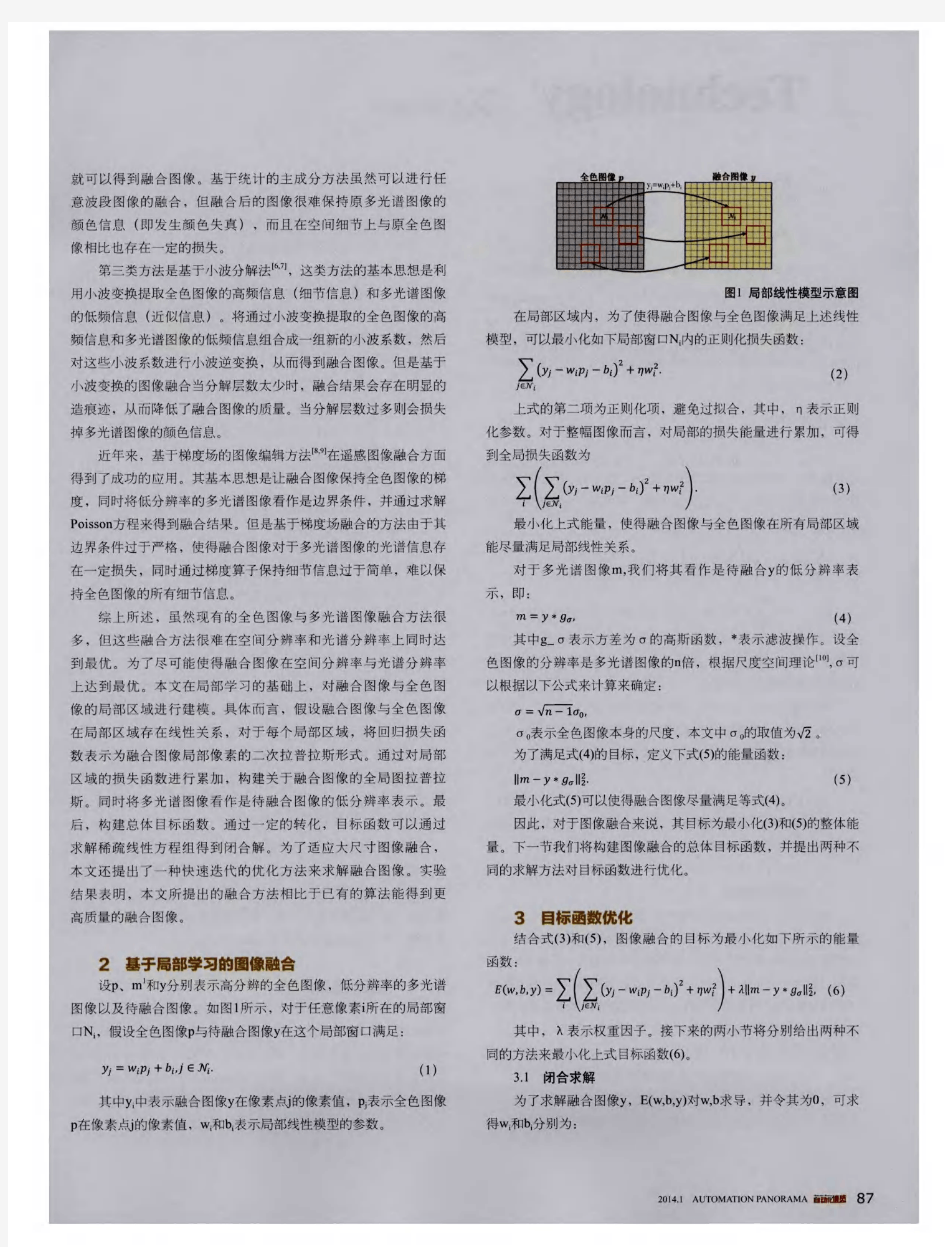
多聚焦图像融合方法综述 摘要:本文概括了多聚焦图像融合的一些基本概念和相关知识。然后从空域和频域两方面将多聚焦图像融合方法分为两大块,并对这两块所包含的方法进行了简单介绍并对其中小波变换化法进行了详细地阐述。最后提出了一些图像融合方法的评价方法。 关键词:多聚焦图像融合;空域;频域;小波变换法;评价方法 1、引言 按数据融合的处理体系,数据融合可分为:信号级融合、像素级融合、特征级融合和符号级融合。图像融合是数据融合的一个重要分支,是20世纪70年代后期提出的概念。该技术综合了传感器、图像处理、信号处理、计算机和人工智能等现代高新技术。它在遥感图像处理、目标识别、医学、现代航天航空、机器人视觉等方面具有广阔的应用前景。 Pohl和Genderen将图像融合定义为:“图像融合是通过一种特定的方法将两幅或多幅图像合成一幅新图像”,其主要思想是采用一定的方法,把工作于不同波长范围、具有不同成像机理的各种成像传感器对同一场景成像的多幅图像信息合成一幅新的图像。 作为图像融合研究重要内容之一的多聚焦图像融合,是指把用同一个成像设备对某一场景通过改变焦距而得到的两幅或多幅图像中清晰的部分组合成一幅新的图像,便于人们观察或计算机处理。图像融合的方法大体可以分为像素级、特征级、决策级3中,其中,像素级的图像融合精度较高,能够提供其他融合方法所不具备的细节信息,多聚焦融合采用了像素级融合方法,它主要分为空域和频域两大块,即: (1)在空域中,主要是基于图像清晰部分的提取,有梯度差分法,分块法等,其优点是速度快、方法简单,不过融合精确度相对较低,边缘吃力粗糙; (2)在频域中,具有代表性的是分辨方法,其中有拉普拉斯金字塔算法、小波变换法等,多分辨率融合精度比较高,对位置信息的把握较好,不过算法比较复杂,处理速度比较慢。 2、空域中的图像融合 把图像f(x,y)看成一个二维函数,对其进行处理,它包含的算法有逻辑滤波器法、加权平均法、数学形态法、图像代数法、模拟退火法等。 2.1 逻辑滤波器法 最直观的融合方法是两个像素的值进行逻辑运算,如:两个像素的值均大于特定的门限值,
高分辨率遥感图像融合方法的比较正式
包头师范学院 本科学年论文 论文题目:高分辨率遥融图像融合方法比较院系:资源与环境学院 专业:地理信息系统 学号:0912430022 姓名:郭殿繁 指导教师:同丽嘎 撰写学年:2010 至2011 学年 二零一零年十二月
摘要:目前,遥感中高分辨率全色遥感影像和低空间分辨率的多光谱遥感影像融合是影像融合技术应用的主流。本文通过对遥感影像四种融合方法的研究,并且用呼和浩特市快鸟影像图像融合举例,加深对四种融合方法的理解和理论应用,最后通过截取呼和浩特市快鸟影像的原始多波段彩色影像和原始高分辨率全色波段影像的一部分进行四种融合方法来进行精度的比较,以ENVI4.7软件作为平台,最终得出,Gram-Schmidt变换效果最好,HSV变换融合效果最差。 关键词:图像融合;PCA变换;Gram-Schmidt变换;Brovey变换;HSV变换;精度比较 Abstract: At present, the remote sensing high resolution full-color remote sensing image and low spatial resolution multi-spectral remote sensing image fusion is image fusion technology application of mainstream. This article through to four kinds of remote sensing image fusion method with the principle and analysis, and in Hohhot, fast image image fusion for example, the bird to deepen the understanding of four fusion method and theory, and finally by intercepting the original image Hohhot fast bird multichannel color image and primitive high-resolution full-color band image on the part of four fusion method for precision compared to ENVI4.7 software as a platform to finally arrive, the best effect, Schmidt transform - the worst. Fusion result transformation HSV. Key words: image fusion, PCA transform; Schmidt transform; the - Brovey transform; HSV transform; Precision;
图像融合的研究背景和研究意义
图像融合的研究背景和研究意义 1概述 2 图像融合的研究背景和研究意义 3图像融合的层次 像素级图像融合 特征级图像融合 决策级图像融合 4 彩色图像融合的意义 1概述 随着现代信息技术的发展,图像的获取己从最初单一可见光传感器发展到现在的雷达、高光谱、多光谱红外等多种不同传感器,相应获取的图像数据量也急剧增加。由于成像原理不同和技术条件的限制,任何一个单一图像数据都不能全面反应目标对象的特性,具有一定的应用范围和局限性。而图像融合技术是将多种不同特性的图像数据结合起来,相互取长补短便可以发挥各自的优势,弥补各自的不足,有可能更全面的反映目标特性,提供更强的信息解译能力和可靠的分析结果。图像融合不仅扩大了各图像数据源的应用范围,而且提高了分析精度、应用效果和使用价值,成为信息领域的一个重要的方向。图像配准是图像融合的重要前提和基础,其误差的大小直接影响图像融合结果的有效性。 作为数据融合技术的一个重要分支,图像融合所具有的改善图像质量、提高几何配准精度、生成三维立体效果、实现实时或准实时动态监测、克服目标提取与识别中图像数据的不完整性等优点,使得图像融合在遥感观测、智能控制、无损检测、智能机器人、医学影像(2D和3D)、制造业等领域得到广泛的应用,成为当前重要的信息处理技术,迅速发展的军事、医学、自然资源勘探、环境和土地、海洋资源利用管理、地形地貌分析、生物学等领域的应用需求更有力地刺激了图像融合技术的发展。 2 图像融合的研究背景和研究意义 Pohl和Genderen对图像融合做了如下定义:图像融合就是通过一种特定算法将两幅或多幅图像合成为一幅新图像。它的主要思想是采用一定的算法,把
遥感影像融合处理方法
遥感影像融合处理方法 摘要:本文介绍了遥感影像数据融合技术,并给出了融合的一些基本理论、融合处理一般步骤以及常用融合处理方法,最后简要描述了融合评价的方式方法等。 关键词:遥感影像融合融合评价 1、前言 将高分辨率的全色遥感影像和低分辨率的多光谱遥感影像进行融合,获得色彩信息丰富且分辨率高的遥感融合影像的过程,成为遥感影像融合。全色影像一般具有较高空间分辨率,多光谱影像光谱信息较丰富,为提高多光谱影像的空间分辨率,可以将全色影像融合进多光谱影像。通过影像融合既可以提高多光谱影像空间分辨率,又能保留其多光谱特性。 2、遥感影像融合一般步骤 遥感影像信息融合一般流程主要分为两个阶段:图像预处理,图像融合变换。 图像预处理主要包括:几何校正及影像配准。几何校正主要在于去除透视收缩、阴影等地形因素以及卫星扰动、天气变化、大气散射等随机因素对成像结果一致性的影响;影像配准的目的在于消除由不同传感器得到的影像在拍摄角度、时相及分辨率等方面的差异。 3 常用融合方式 3.1 IHS融合 IHS(亮度I、色度H、饱和度S)变换就是将影像从RGB彩色空间变换到IHS空间来实现影像融合的一种方法。由光学、热红外和雷达(微波)等方式得到的不同波段遥感数据,合成的RGB颜色空间是一个对物体颜色属性描述系统,而IHS色度空间提取出物体的亮度、色度、饱和度,它们分别对应每个波段的平均辐射强度、数据向量和的方向及其等量数据的大小。RGB颜色空间和IHS 色度空间有着精确的转换关系。IHS变换法只能用三个波段的多光谱影像融合和全色影像融合。 3.2 小波融合 小波变换,基于遥感影像的频域分析进行的,由于同一地区不同类型的影像,低频部分差别不大,而高频部分相差很大,通过小波变换对变换区实现分频,在分频基础上进行遥感影像的融合,常用于雷达影像SAR与TM影像的融合。
利用ENVI软件进行遥感图像的融合和增强实习报告
遥感图像处理实习报告 实验内容:影像融合与增强 班级:测绘1102班 学号:13 姓名: 指导老师:陈晓宁、黄远程、竞霞、史晓亮 西安科技大学 测绘科学与技术学院 二零一三年一月 实习三影像融合与增强
一、实习内容: 1.掌握ENVI中各种影像融合方法,并比较各方法的优缺点; 2.熟悉ENVI图像增强操作; 3.本实习的数据源为上节已经过校正的资源三号多光谱和全色影像。 二、实习目的: 1.了解和认识各种图像融合方法的原理、内容及要点; 2.熟悉、熟练操作ENVI软件中各种图像融合的方法、步骤并学会加以比较; 3.学习利用ENVI软件进行各种图像增强处理操作; 4.学会定性、定量分析比较图像融合的差异。 三、实习步骤: 1.图像融合: 三波段融合: HSV和Color Normalized (Brovey)变换: 1)从ENVI主菜单中,选择File → Open Image File,分别加载校正后的资源三号多光谱与全色影像到可用波段列表Available Bands List中; 2)选择多光谱3,2,1波段(可以根据需要选择)对应R,G,B,点击Load RGB将多光谱影像加载到显示窗口display#1; 3)在ENVI的主菜单选择Transform → Image Sharpening → HSV; 4)在Select Input RGB Input Bands对话框中,选择Display #1,然后点击OK。 5)从High Resolution Input File对话框中选择全色影像,点击OK。 6)从HSV Sharpening Parameters对话框中,选择重采样方法,并输入输出路径和文件名,点击OK。即可完成HSV变换融合;
机器视觉系统与数字图像处理
第2章机器视觉系统与数字图像处理 2.1机器视觉系统 2.1.1机器视觉系统简介 机器视觉系统是指利用机器替代人眼做出各种测量和判断。机器视觉是工程领域和科学领域中的一个非常重要的研究领域,它是一门涉及光学、机械、计算机、模式识别、图像处理、人工智能、信号处理以及光电一体化等多个领域的综合性学科,其能以及应用范围随着工业自动化的发展逐渐完善和推广,其中母子图像传感器、CMOS和CCD摄像机、DSP、ARM嵌入式技术、图像处理和模式识别等技术的快速发展,有力地推动了机器视觉的发展。机器视觉是一种比较复杂的系统。因为大多数系统监控对象都是运动物体,系统与运动物体的匹配和协调动作尤为重要,所以给系统各部分的动作时间和处理速度带来了严格的要求。在某些应用领域,例如机器人、飞行物体导制等,对整个系统或者系统的一部分的重量、体积和功耗都会有严格的要求。 机器视觉系统通过图像摄取装置将被摄取目标转换成图像信号,传送给专用的图像处理系统,根据像素分布和亮度、颜色等信息,转变成数字化信号。机器视觉系统可以快速获取大量信息,而且易于自动处理,也易于同设计信息以及加工控制信息集成。在生产线上,人来做此类测量和判断会因疲劳、个人之间的差异等产生误差和错误,但是机器却会不知疲倦地、稳定地进行下去;在一些不适合人工作业的危险工作环境或人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉。机器视觉系统就其检测性质和应用范围而言,分为定量和定性检测两大类,每类又分为不同的子类。机器视觉在工业在线检测的各个应用领域十分活跃,如:印刷电路板的视觉检查、钢板表面的自动探伤、大型工件平行度和垂直度测量、容器容积或杂质检测、机械零件的自动识别分类和几何尺寸测量等。此外,在许多其它方法难以检测的场合,利用机器视觉系统可以有效地实现。机器视觉的应用正越来越多地代替人去完成许多工作,这无疑在很大程度上提高了生产自动化水平和检测系统的智能水平 机器视觉系统的优点有:1.非接触测量,对于被检测对象不会产生任何损伤,而且提高了系统能够的可靠性;2.较宽的光谱响应范围,例如使用人眼看不见的红外测量,扩展人眼的视觉范围;3.长时间稳定工作,人类难以长时间对同一对象进行观察,而机器视觉系统则可以长时间地作测量、分析和识别任务。机器视觉系统的应用领域越来越广泛。在工业、农业、国防、交通、医疗、金融甚至体育、娱乐等等行业都获得了广泛的应用,可以说已经深入到我们的生活、生产和
ENVI中的融合方法
ENVI下的图像融合方法 图像融合是将低空间分辨率的多光谱影像或高光谱数据与高空间分辨率的单波段影像重采样生成成一副高分辨率多光谱影像遥感的图像处理技术,使得处理后的影像既有较高的空间分辨率,又具有多光谱特征。图像融合的关键是融合前两幅图像的精确配准以及处理过程中融合方法的选择。只有将两幅融合图像进行精确配准,才可能得到满意的结果。对于融合方法的选择,取决于被融合图像的特征以及融合目的。 ENVI中提供融合方法有: ?HSV变换 ?Brovey变换 这两种方法要求数据具有地理参考或者具有相同的尺寸大小。RGB输入波段必须为无符号8bit数据或者从打开的彩色Display中选择。 这两种操作方法基本类似,下面介绍Brovey变换操作过程。 (1)打开融合的两个文件,将低分辨率多光谱图像显示在Display中。 (2)选择主菜单-> Transform -> Image Sharpening->Color Normalized (Brovey),在Select Input RGB对话框中,有两种选择方式:从可用波段列表中和从Display窗口中,前者要求波段必须为无符号8bit。 (3)选择Display窗口中选择RGB,单击OK。 (4) Color Normalized (Brovey)输出面板中,选择重采样方式和输入文件路径及文件名,点击OK输出结果。 对于多光谱影像,ENVI利用以下融合技术: ?Gram-Schmidt ?主成分(PC)变换 ?color normalized (CN)变换 ?Pan sharpening 这四种方法中,Gram-Schmidt法能保持融合前后影像波谱信息的一致性,是一种高保真的遥感影像融合方法;color normalized (CN)变换要求数据具有中心波长和FWHM,;Pansharpening融合方法需要在ENVI Zoom中启动,比较适合高分辨率影像,如QuickBird、IKONOS等。 这四种方式操作基本类似,下面介绍参数相对较多的Gram-Schmidt操作过程。 (1)打开融合的两个文件。
遥感图像融合质量评价方法
遥感图像融合质量评价方法 武坚李崇伟王积武李相全 (68011部队甘肃兰州 730020) 摘要:图像融合可为摄影测量与遥感提供高质量的遥感融合图像。遥感融合图像质量如何是图像使用者关心的一个重要问题。本文运用主观评价、客观评价、几何质量等三种评价方法对融合后的遥感图像的质量展开讨论。实践表明这些评价方法能够保证融合后图像高质量地应用于摄影测量与遥感生产。 关键词:主观评价客观评价几何质量质量评价 1.前言 摄影测量与遥感[1]是以数字影像为基础,来确定被摄物体的形状、大小、空间位置及其性质。遥感图像是摄影测量与遥感最原始、最基本的资料。高质量的遥感图像是完成摄影测量与遥感的基础。遥感影像融合[2]是将多传感器、多时相、多光谱和多分辨率影像的各自局部优势信息整合处理,以提供高分辨率、多光谱的单一图像,解决遥感影像解译过程中信息不足的问题。由此看出,图像融合可以为摄影测量与遥感提供高质量的遥感影像。 2.图像融合的评价方法 当前对融合后图像的质量评价主要是主观目视与统计相关信息参数相结合的办法,即:利用目视效果和信息熵、清晰度、平均梯度、偏差指数、均方根误差等参数统计分析,而对融合后图像的几何量测性则关注较少。对于摄影测量与遥感应用,几何精度是一个很重要的因素。本文结合摄影测量与遥感应用角度,来对分析融合后图像的质量做出评价。 站在通用图像处理角度,目前大多数对影像质量评价分为主观评价和客观评价,并结合起来使用。主观评价是通过目视观察进行分析,客观评价是利用图像的统计参数进行判定。严格意义上讲,融合图像的主客观评价应该是一致的,即图像的统计参数特征应该符合人眼的目视感觉。但由于遥感图像融合具有特殊性,它不仅仅要求提高融合图像的空间分辨率,而且要尽可能制约[2]。因此,对遥感融合图像的质量评价,应综合考虑空间细节的增强和光谱保持原始图像的光谱特征。此外,这两个要求在很大程度上是不太相容,相互信息的保持两个方面,利用图像的统计参数结合目视观察来分析与评价。 对于摄影测量与遥感而言,影像的几何质量(影像的可量测性)是很重要的一个因素,它将决定融合图像能否达到数字地形图生产的精度限差[4]。因此,从主观、客观、几何质量等三个方面对做出质量评价可以保证融合后图像高质量地应用于摄影测量与遥感生产。
数字图像处理与机器视觉 2015-2016期末试卷参考答案
数字图像处理与机器视觉 2015-2016期末试卷参考答案南昌大学研究生2015,2016年第2学期期末考试试卷 试卷编号: (开)卷课程名称: 数字图像处理与机器视觉适用班级: 2015级硕士研究生姓名: 学号: 专业: 学院: 机电工程学院考试日期: 题号一二三四五六七八九十总分累分人 签名题分 10 15 15 10 20 30 100 得分 考生注意事项:1、本试卷共4页,请查看试卷中是否有缺页或破损。如有请报告以便更换。 2、使用A4答题纸,注意装订线。 一、单项选择题(从下列各题四个备选答案中选出一个正确答案,并将其 代号填在题前的括号内。每小题1分,共10分) ( b )1.图像与灰度直方图间的对应关系是: a.一一对应 b.多对一 c.一对多 d.都不对 ( d )2. 下列算法中属于图象平滑处理的是: a.Hough变换法 b.状态法 c.高通滤波 d. 中值滤波 ( c )3.下列算法中属于图象锐化处理的是: a.局部平均法 b.最均匀平滑法 c.高通滤波 d. 中值滤波 ( d )4. 下列图象边缘增强算子中对噪声最敏感的是: a.梯度算子 b.Prewitt算子 c.Roberts算子 d. Laplacian算子 ( b )5. 下列算法中属于点处理的是: a.梯度锐化 b.二值化 c.傅立叶变换 d.中值滤波 ( d )6.下列算子中利用边缘灰度变化的二阶导数特性检测边缘的是:
a.梯度算子 b.Prewitt算子 c.Roberts算子 d. Laplacian算子 ( c )7.将灰度图像转换成二值图像的命令为: a.ind2gray b.ind2rgb c.im2bw d.ind2bw ( d )8.数字图像处理的研究内容不包括: a.图像数字化 b.图像增强 c.图像分割 d.数字图像存储 ( d )9.对一幅100?100像元的图象,若每像元用,bit表示其灰度值,经霍夫曼编码后图象的压缩比为2:1,则压缩图象的数据量为: a.2500bit b.20000bit c.5000bit d.40000bit ( b )10.图像灰度方差说明了图像哪一个属性: a.平均灰度 b.图像对比度 c.图像整体亮度 d.图像细节 第 1 页 二、填空题(每空1分,共15分) l. 图像处理中常用的两种邻域是 4-邻域和 8-邻域。 2.图象平滑既可在空间域中进行,也可在频率域中进行。 3.常用的灰度内插法有最近邻元法、双线性内插法和三次内插法。 4. 低通滤波法是使高频成分受到抑制而让低频成分顺利通过,从而实现图像平滑。 5.Prewitt边缘检测算子对应的模板是和。 -1 -1 -1 -1 0 1 0 0 0 -1 0 1 1 1 1 -1 0 1 (不分先后) 6.图像压缩系统是有编码器和解码器两个截然不同的结构块组成的。 7.灰度直方图的纵坐标是该灰度出现的频率。 8.依据图象的保真度,图象编码可分为无失真(无损)编码和有失真(有损)编码两 种。
实验五 遥感图像的融合
实验五遥感图像的融合 一、实验目的和要求 1.理解遥感图像的融合处理方法和原理; 2.掌握遥感图像的融合处理,即分辨率融合处理。 二、设备与数据 设备:影像处理系统软件 数据:TM SPOT 数据 三、实验内容 多光谱数据与高分辨率全色数据的融合。 分辨率融合是遥感信息复合的一个主要方法,它使得融合后的遥感图象既具有较好的空间分辨率,又具有多光谱特征,从而达到增强图象质量的目的。 注意:在调出了分辨率融合对话框后,关键是选择融合方法,定义重采样的方法。 四、方法与步骤 融合方法有很多,典型的有HSV、Brovey、PC、CN、SFIM、Gram-Schmidt 等。ENVI 里除了SFIM 以外,上面列举的都有。 HSV 可进行RGB 图像到HSV 色度空间的变换,用高分辨率的图像代替颜色亮度值波段,自动用最近邻、双线性或三次卷积技术将色度和饱和度重采样到高分辨率像元尺寸,然后再将图像变换回RGB 色度空间。输出的RGB 图像的像元将与高分辨率数据的像元大小相同。 打开ENVI,在主菜单中打开数据文件LC81200362016120LGN00_MTL 选择File>data manage,任意选择3个波段组合,查看效果
打开分辨率为30和15的图像
下图分别是分辨率为30、15的,可以看到图像清晰度明显发生改变,分辨率越高,图像越清晰
下面进行融合 点击工具栏中的Image Sharpening>Gram-Schmidt Pan Sharpening,在对话框中点击Spectral Subset…改变其波段 选择如下图所示的三个波段
三种图像融合方法实际操作与分析
摘要:介绍了遥感影像三种常用的图像融合方式。进行实验,对一幅具有高分辨率的SPOT全色黑白图像与一幅具有多光谱信息的SPOT图像进行融合处理,生成一幅既有高分辨率又有多光谱信息的图像,简要分析比较三种图像融合方式的各自特点,择出本次实验的最佳融合方式。 关键字:遥感影像;图像融合;主成分变换;乘积变换;比值变换;ERDAS IMAGINE 1. 引言 由于技术条件的限制和工作原理的不同,任何来自单一传感器的信息都只能反映目标的某一个或几个方面的特征,而不能反应出全部特征。因此,与单源遥感影像数据相比,多源遥感影像数据既具有重要的互补性,也存在冗余性。为了能更准确地识别目标,必须把各具特色的多源遥感数据相互结合起来,利用融合技术,针对性地去除无用信息,消除冗余,大幅度减少数据处理量,提高数据处理效率;同时,必须将海量多源数据中的有用信息集中起来,融合在一起,从多源数据中提取比单源数据更丰富、更可靠、更有用的信息,进行各种信息特征的互补,发挥各自的优势,充分发挥遥感技术的作用。[1] 在多源遥感图像融合中,针对同一对象不同的融合方法可以得到不同的融合结果,即可以得到不同的融合图像。高空间分辨率遥感影像和高光谱遥感影像的融合旨在生成具有高空间分辨率和高光谱分辨率特性的遥感影像,融合方法的选择取决于融合影像的应用,但迄今还没有普适的融合算法能够满足所有的应用目的,这也意味着融合影像质量评价应该与具体应用相联系。[2] 此次融合操作实验是用三种不同的融合方式(主成分变换融合,乘积变换融合,比值变换融合),对一幅具有高分辨率的SPOT全色黑白图像与一幅具有多
光谱信息的SPOT图像进行融合处理,生成一幅既有高分辨率又有多光谱信息的图像。 2. 源文件 1 、 imagerycolor.tif ,SPOT图像,分辨率10米,有红、绿、两个红外共四个波段。 2 、imagery-5m.tif ,SPOT图像,分辨率5米。 3. 软件选择 在常用的四种遥感图像处理软件中,PCI适合用于影像制图,ENVI在针对像元处理的信息提取中功能最强大,ER Mapper对于处理高分辨率影像效果较好,而ERDAS IMAGINE的数据融合效果最好。[3] ERDAS IMAGINE是美国Leica公司开发的遥感图像处理系统。它以其先进的图像处理技术,友好、灵活的用户界面和操作方式,面向广阔应用领域的产品模块,服务于不同层次用户的模型开发工具以及高度的RS/GIS(遥感图像处理和地理信息系统)集成功能,为遥感及相关应用领域的用户提供了内容丰富而功能强大的图像处理工具。 2012年5月1日,鹰图发布最新版本的ERDAS IMAGINE,所有ERDAS 2011软件用户都可以从官方网站上下载最新版本 ERDAS IMAGINE 11.0.5. 新版本包括之前2011服务包的一些改变。相比之前的版本,新版本增加了更多ERDAS IMAGINE和GeoMedia之间的在线联接、提供了更为丰富的图像和GIS产品。用户使用一个单一的产品,就可以轻易地把两个产品结合起来构建一个更大、更清
遥感图像的假彩色合成
北京化工大学 学士学位论文 遥感图像的假彩色合成 姓名:刘晓璐 班级:信息与计算科学0304班 学号:200362102
遥感图像的假彩色合成 摘要:遥感,作为采集地球数据及其变化信息的重要技术手段,在世界范围内及其我国的许多政府部门,科研单位和公司得到了广泛的应用。在遥感数据源向着更高光谱分辨率和更高空间分辨率发展的同时,处理技术也更加成熟;在应用上,结合了地理信息系统(GIS)和全球定位系统(GPS),向着更系统化,更定量化方向发展,使遥感数据的应用更加广泛和深入。 假彩色增强是将一幅彩色图像映射为另一幅彩色图像,从而达到增强彩色对比,使某些图像达到更加醒目的目的。 本文的主要目的就是大遥感的多光谱图像用自然彩色显示。在遥感的多光谱图像中,有些是不可见光波段的图像,如近红外,红外,甚至是远红外波段。因为这些波段不仅具有夜视能力,而且通过与其他波段的配合,易于区分地物。 用假彩色技术处理多光谱图像,目的不在于使景物恢复自然的彩色,而是从中获得更多的信息。为了实现这样的目的,本文采用了MATLAB数学软件编程的方法以及运用Envi4.2 软件直接编辑图像这两种方法,并对其进行对比,得出最优的合成图像。 关键词:图像融合,假彩色合成,彩色增强,灰度级,RGB图像,
False color mapping for image fusion Abstract: A pixel-based color-mapping algorithm is presented that produces a fused false color rendering of two gray-level images representing different sensor modalities. The resulting images have a higher information content than each of the original images and retain sensor specific image information. The unique component of each image modality is enhanced in the resulting fused color image representation. First, the component of two original input images is determined. Second, the common component of each image. Third, the unique component of each image modality is subtracted from the image of the other modality. This step serves to enhance the representation of sensor-specific details in the final fused result. Finally, a fused color image is produced by displaying the images resulting from the last step through, respectively, the red and green channels of a color display. The method is applied to fuse thermal and visual images. The results show that the color mapping enhances the visibility of certain details and preserves the specificity of the sensor information. The fused images also have a fairly natural appearance. The fusion scheme involves only operations on corresponding pixels. The resolution of the input images. Before fusing, the contrast of the images can be enhanced and their noise can be reduced by standard image processing techniques. The color mapping algorithm is computationally simple. This implies that the investigated approaches can eventually be applied in real time and that the hardware needed is not too complicated or too voluminous(an important consideration when it has to fit in an airplane, for instance). Key words: image fusion, false color mapping, color enhances, gray-level, RGB images
(完整版)遥感图像融合技术的发展现状
遥感图像融合技术的发展现状及趋势 1 引言 多源图像融合属于多传感器信息融合的范畴, 是指将不同传感器获得的同一景物的图像或同一传感器在不同时刻获得的同一景物的图像, 经过相应处理后, 再运用某种融合技术得到一幅合成图像的过程。多幅图像融合可克服单一传感器图像在几何、光谱和空间分辨率等方面存在的局限性和差异性, 提高图像的质量, 从而有利于对物理现象和事件进行定位、识别和解释。与单源遥感图像相比, 多源遥感图像所提供的信息具有冗余性、互补性和合作性。因此,将多源遥感图像各自的优势结合应用, 获得对环境正确的解译是极为重要的。多源遥感图像融合则是富集这些多种传感器遥感信息的最有效途径之一,是现代多源数据处理和分析中非常重要的一步。本文基于遥感图像融合的研究现状、分析了图像融合研究的困境和不足, 最后提出了未来的发展趋势和热点, 以期达到抛砖引玉的作用。 2 遥感图像融合研究现状 随着信息科学技术的发展, 在20 世纪七八十年代诞生了一个称为数据融合的全新概念。这一概念不断扩展, 处理的对象由一般的数据发展到数字图像。1979 年, Daliy 等人首先将雷达图像和LandsatMSS 图像的复合图像应用于地质解译, 被认为是最早的图像
融合。20 世纪80 年代, 图像融合技术逐渐应用到遥感图像的分析和处理中。90年代以后, 图像融合技术成为研究的热点, 并成为很多遥感图像应用的一个重要预处理环节。目前, 遥感图像融合已经发展为像素级、特征级和决策级3个层次, 如表1。需要指出的是, 融合层次并没有划分融合算法严格的界限, 因为本质上各个融合层次都是信息融合的范畴。像素级图像融合技术已被广泛研究和应用, 并取得了一定的成果。特征级融合是一种中等层次的信息融合, 利用从各个传感器图像的原始信息中提取的特征信息,进行综合分析及融合处理, 不仅增加从图像中提取特征信息的可能性, 还可能获取一些有用的复合特征, 尤其是边缘、角、纹理、相似亮度区域、相似景深区等。在特征级融合中, 对图像配准的要求不如像素级图像融合对配准要求那么严格。决策级图像融合是一种更高层次的信息融合, 其结果将为各种控制或决策提供依据。在进行融合处理前, 先对图像进行预处理、特征提取、识别或判决, 建立对同一目标的初步判决和结论, 然后对各个图像的决策进行相关处理, 最后进行决策级的融合。从特点来看,不同层次的融合各有优缺点, 难以在信息量和算法效率方面都同时满足需求。 表一:遥感图像融合三个层次的对比 融合层次融合算法特点
机器视觉应用有哪些 浅谈机器视觉软件的介绍与选择
机器视觉应用有哪些浅谈机器视觉软件的介绍与选择 本文主要是关于机器视觉的相关介绍,并着重对机器视觉的应用场景进行了详尽的阐述。 机器视觉机器视觉是人工智能正在快速发展的一个分支。简单说来,机器视觉就是用机器代替人眼来做测量和判断。机器视觉系统是通过机器视觉产品(即图像摄取装置,分CMOS 和CCD两种)将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字化信号;图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。 机器视觉是一项综合技术,包括图像处理、机械工程技术、控制、电光源照明、光学成像、传感器、模拟与数字视频技术、计算机软硬件技术(图像增强和分析算法、图像卡、I/O 卡等)。一个典型的机器视觉应用系统包括图像捕捉、光源系统、图像数字化模块、数字图像处理模块、智能判断决策模块和机械控制执行模块。[2]机器视觉系统最基本的特点就是提高生产的灵活性和自动化程度。在一些不适于人工作业的危险工作环境或者人工视觉难以满足要求的场合,常用机器视觉来替代人工视觉。同时,在大批量重复性工业生产过程中,用机器视觉检测方法可以大大提高生产的效率和自动化程度。 一个典型的工业机器视觉系统包括:光源、镜头(定焦镜头、变倍镜头、远心镜头、显微镜头)、相机(包括CCD相机和COMS相机)、图像处理单元(或图像捕获卡)、图像处理软件、监视器、通讯/ 输入输出单元等。 系统可再分为 一、采集和分析分开的系统。 主端电脑(Host Computer) 影像撷取卡(Frame Grabber)与影像处理器 影像摄影机 定焦镜头镜头 显微镜头
图像融合算法概述
图像融合算法概述 摘要:详细介绍了像素级图像融合的原理,着重分析总结了目前常用的像素级图像融合的方法和质量评价标准,指出了像素级图像融合技术的最新进展,探讨了像素级图像融合技术的发展趋势。 关键词:图像融合; 多尺度变换; 评价标准 Abstract:This paper introduced the principles based on image fusion at pixel level in detail, analysed synthetically and summed up the present routine algorithm of image fusion at pixel level and evaluation criteria of its quality. It pointed out the recent development of image fusion at pixel level, and discussed the development tendency of technique of image fusion at pixel level. Key words:image fusion; multi-scale transform; evaluation criteria 1.引言: 图像融合是通过一个数学模型把来自不同传感器的多幅图像综合成一幅满足特定应用需求的图像的过程, 从而可以有效地把不同图像传感器的优点结合起来, 提高对图像信息分析和提取的能力[ 1] 。近年来, 图像融合技术广泛地应用于自动目标识别、计算机视觉、遥感、机器人、医学图像处理以及军事应用等领域。图像融合的主要目的是通过对多幅图像间冗余数据的处理来提高图像的可靠性; 通过对多幅图像间互补信息的处理来提高图像的清晰度。根据融合处理所处的阶段不同,图像融合通常可以划分为像素级、特征级和决策级。融合的层次不同, 所采用的算法、适用的范围也不相同。在融合的三个级别中, 像素级作为各级图像融合的基础, 尽可能多地保留了场景的原始信息, 提供其他融合层次所不能提供的丰富、精确、可靠的信息, 有利于图像的进一步分析、处理与理解, 进而提供最优的决策和识别性能. 2.图像融合算法概述 2.1 图像融合算法基本理论