坐标正算反算公式讲解..
一 方位角:
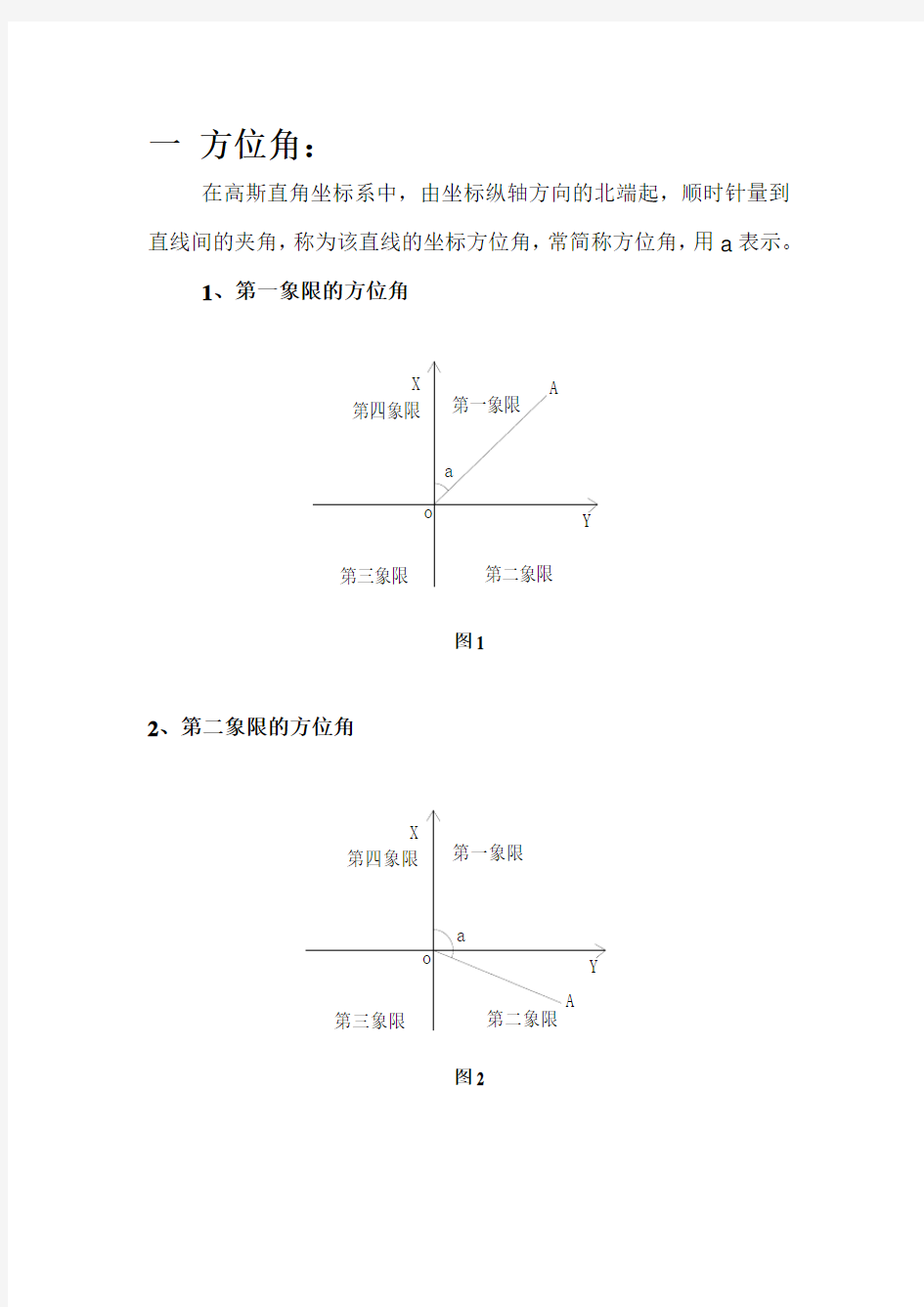
在高斯直角坐标系中,由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用a 表示。
1、第一象限的方位角
Y
X
第一象限第二象限
第三象限
第四象限
o
A
a
图1
2、第二象限的方位角
Y X
第一象限
第二象限第三象限
第四象限
o
A
a
图2
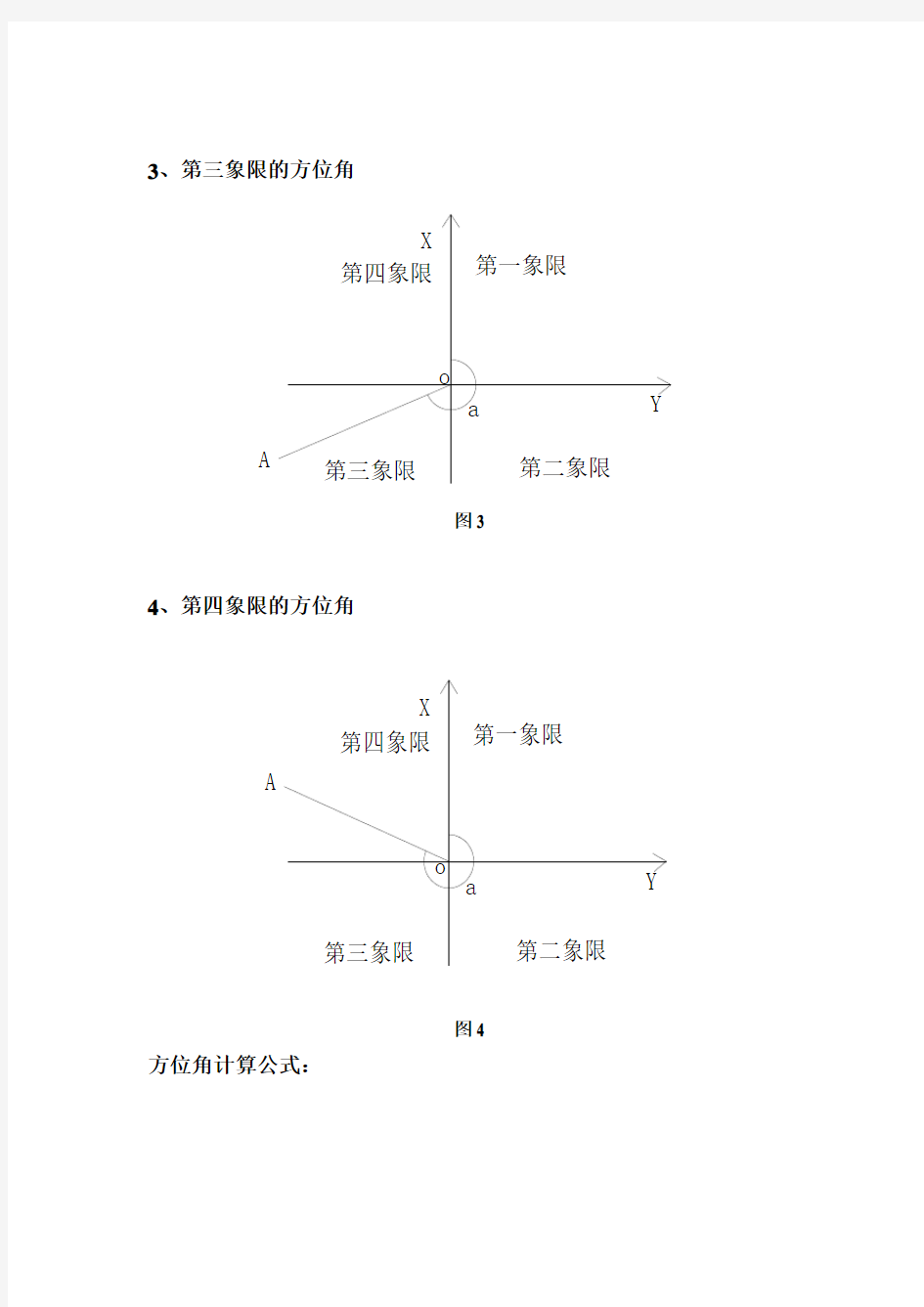
3、第三象限的方位角
Y
X
第一象限
第二象限
第三象限
第四象限
o A
a
图3
4、第四象限的方位角
Y
X
第一象限
第二象限
第三象限
第四象限
o
A
a
图4
方位角计算公式:
x
=a -1
tan
A Y O Y -A
X O
X
-
方位角的计算器计算程序:Pol(X A -X O ,Y A -Y O )
直线OA 方位角度值赋予给计算器的字母J ,0≤J <360。 直线段OA 的距离值赋予给计算器的字母I,I >0 直线OA 与直线AO 的方位角关系: 1、
当直线OA 的方位角≤180°时,其反方位角等于a+180°。
2、 当直线
OA 的方位角>180°时,其反方位角等于a-180°。
二 方位角的推算 (一)几个基本公式 1、坐标方位角的推算
或:
注意:若计算出的方位角>360°,则减去360°;若为负值,则加上360°。
例题:方位角的推算
已知:α12=30°,各观测角β如图,求各边坐标方位角α23、α34、α
45
、α51。
13
图5
解: α23= α12-β2+180°=30°-130°+180°=80°
α34= α23-β3+180°=80°-65°+180°=195°
α45=α34-β4+180°=195°-128°+180°=247°
α51=α45-β5+180°=247°-122°+180°=305°
α12=α51-β1+180°=305°-95°+180°=30°(检查)
三坐标正算
一、直线段的坐标计算
o
B D
A
C
E
a
a
p
图6
设起点O的坐标(X O,Y O),直线OP的方位角为F op,求A、C、E点的坐标
1、设直线段OA长度为L,则A点坐标为
X A=X O+L×Cos(F op)
Y A=Y O+L×Sin(F op)
2、设直线段OB长度为L OB,直线段BC长度为L BC,则C点坐标为
X B=X O+L OB×Cos(F op)
Y B=Y O+L OB×Sin(F op)
直线BC的方位角F BC=F op+a
IF F B C>360°:Then F BC-360°→F BC:IfEnd
X C=X B+L BC×Cos(F BC)
Y C=Y B+L BC×Sin(F BC)
3、设直线段OD长度为L
,直线段DE长度为L DE,则E点坐标为
OD
X D=X O+L OD×Cos(F op)
Y D=Y O+L OD×Sin(F op)
直线DE的方位角F DE=F op-a
IF F DE<0°:Then F DE+360°→F DE:IfEnd
X E=X D+L DE×Cos(F DE)
Y E=Y D+L DE×Sin(F DE)
二、缓和曲线段的坐标计算
x Y 00=L- +=L 40R L 52s 2L
3456R L 9
4s 4
L 6R L 3s L 336R L 7
s 33
-90 L πRL s
O
2
切线角=
设完整缓和曲线起点O 的坐标为O (XO,YO ),方位角为F ,曲线长度为L S ,曲线上任一
点的曲线长度为L,
当线路右转时直线CP 的方位角Fcp=F+90°
IF F cp >360°:Then F cp-360°→F cp :IfEnd
当线路左转时直线CP 的方位角Fcp=F-90°
IF F cp<0°:Then F cp+360°→F cp:IfEnd
X P=X O+Abs(x O)×Cos(F)+Abs(y O)×COS(F CP)
Y P=Y O+Abs(x O)×Sin(F)+Abs(y O)×Sin(F CP)
三、圆曲线段的坐标计算
圆曲线的已知点数据为起点S的桩号K s、走向方位角αs、起点S 坐标为(X o,Y o)、圆曲线半径为R与曲线长为L。设半径为R的圆曲线中线上任意点j的桩号为K j,求Z j点的坐标?
x
解:
弦长sj的弦切角与弦长为
弦切角θsj=(L j/(2R))×(180°/π)=(90°×L j)/(πr) 弦长C sj=2Rsin(θsj)
则弦长sj的方位角为αsj=αs±θsj
圆曲线上任意j点的方位角为αj=αs±2θsj
求得圆曲线上任意点j的计算公式为
X j=X O+C sj×Cos(αsj)
Y j=Y O+C sj×Sin(αsj)
四坐标反算
1、直线段坐标反算
x
图9
反算原理
如图9所示,直线 se的点斜式为
y-y p=tanαs(x-x p) (公式1)
将起点S 的坐标代入解得
y p = y s - tan αs (x s -x p ) (公式2)
因直线jp 垂直于直线sp ,故p 点中桩坐标因满足垂线jp 的下列点斜式方程 y p -y j = -(x p -x j ) / tan αs (公式3) 将公式2代入公式3得
y s - tan αs (x s -x p )- y j =-(x p -x j ) / tan αs tan αs (y s -y j )- tan 2αs x s + tan 2αs x p =-x p +x j 简化后得
=x tan 2+1j
+a s
tan 2a s
x s
-tan a(y -y )s
j
p
x
=p
y j
y -j
y j
y -tan
a s
2、圆曲线段坐标反算原理
x
图10
反算原理
如图10所示,设j点为圆曲线附近任意边桩点,坐标为j(X,Y),已知点S点坐标为(X0,Y0),则圆心点C的坐标为
X c=X0+R×COS(αs±90°)
Y c=Y0+ R×sin(αs±90°)
再根据圆心点C与j点的坐标算出直线cj的方位角αcj与距离d cj,则j点的边距为dj=R-d cj,由圆心点坐标反算垂足点p的中桩坐标为
X P=X C+R×COS(αcj)
Y P=Y C+ R×sin(αcj)
再根据S 点的坐标和P 点的坐标求出弦长SP 的距离
Csp=√((X 0-X P )2+(Y 0-Y P )2
)
再根据弦长SP 的距离和反三函数的关系,求出弦切角θsp 值(单位为度)。
=sp
θ-1
sin sp
c
2R
求出弦切角后就可以求出弧长sp 的值及P 点的走向方位角αp 的值:
=sp
L
360
sp θ20
×2πR
αp =αs ±2θsp
坐标正算反算公式讲解(借鉴材料)
一 方位角: 在高斯直角坐标系中,由坐标纵轴方向的北端起,顺时针量到直线间的夹角,称为该直线的坐标方位角,常简称方位角,用a 表示。 1、第一象限的方位角 Y X 第一象限第二象限 第三象限 第四象限 o A a 图1 2、第二象限的方位角 Y X 第一象限 第二象限第三象限 第四象限 o A a 图2
3、第三象限的方位角 Y X 第一象限 第二象限 第三象限 第四象限 o A a 图3 4、第四象限的方位角 Y X 第一象限 第二象限 第三象限 第四象限 o A a 图4 方位角计算公式:
x =a -1 tan A Y O Y -A X O X - 方位角的计算器计算程序:Pol(X A -X O ,Y A -Y O ) 直线OA 方位角度值赋予给计算器的字母J ,0≤J <360。 直线段OA 的距离值赋予给计算器的字母I,I >0 直线OA 与直线AO 的方位角关系: 1、 当直线OA 的方位角≤180°时,其反方位角等于a+180°。 2、 当直线 OA 的方位角>180°时,其反方位角等于a-180°。 二 方位角的推算 (一)几个基本公式 1、坐标方位角的推算
或: 注意:若计算出的方位角>360°,则减去360°;若为负值,则加上360°。 例题:方位角的推算 已知:α12=30°,各观测角β如图,求各边坐标方位角α23、α34、α 45 、α51。 13 图5
解:α23= α12-β2+180°=30°-130°+180°=80° α34= α23-β3+180°=80°-65°+180°=195° α45=α34-β4+180°=195°-128°+180°=247° α51=α45-β5+180°=247°-122°+180°=305° α12=α51-β1+180°=305°-95°+180°=30°(检查) 三坐标正算 一、直线段的坐标计算 o B D A C E a a p 图6 设起点O的坐标(X O,Y O),直线OP的方位角为F op,求A、C、E点的坐标 1、设直线段OA长度为L,则A点坐标为 X A=X O+L×Cos(F op)
坐标正反算(带高程,可以算任何线性)
100→DimZ:”ZS=1,FS=2”?Q:”K+”?M If Q=1:Then Goto A:Else Goto S:IfEnd Lb1 S “X1=”?S “Y1=”?T Lb1 A If M<23285.856(第一缓和曲线起点):Then 22396.61(起点交点)→Z:3049173.247(起点X坐标)→A:121°1°16.97°(起点方位角)→C: C:236818.413(起点Y坐标)→B:1×1020(起点半径)→R:0(右转输入0,左转输入1)→F:0(起点缓和曲线长)→L:Goto 0:IfEnd If M<23647.847(第二缓和曲线起点或圆曲线终点):Then 23285.856(第一缓和曲线起点)→Z:3048706.061(起点X坐标)→A:121°1°16.97°(起点方位角)→C:237595.285(起点Y坐标)→B:640(起点半径)→R:0(右转输入0,左转输入1)→F:180(缓和曲线长)→L:Goto 0:IfEnd If M<23827.847(第二缓和曲线终点):Then 3048473.122(起点X坐标)→A:237868.071(起点Y坐标)→B: 145°22°16.81°(线元方位角)→C :(1÷640)(上一段曲率半径)→D: 1÷(1×1020)(下一段曲率半径)→E:23647.847(第二缓和曲线起点或圆曲线终点)→Z:23827.847→H:Goto H:IfEnd
If Q=2:Then 0→U:0→O: Else “U=”?U: “O=”?O:IfEnd M-Z→Z[12] If√(Z[12]2) 高斯投影坐标正反算 一、相关概念 大地坐标系由大地基准面和地图投影确定,由地图投影到特定椭圆柱面后在南北两极剪开展开而成,是对地球表面的逼近,各国或地区有各自的大地基准面,我国目前主要采用的基准面为:基准面,为GPS基准面,17届国际大地测量协会上推荐,椭圆柱长半轴a=6378137m,短半轴b=; 2.西安80坐标系,1975年国际大地测量协会上推荐,椭圆柱长半轴a=6378140m,短半轴b=; 3.北京54坐标系,参照前苏联克拉索夫斯基椭球体建立,椭圆柱长半轴a=6378245m, 短半轴b=; 通常所说的高斯投影有三种,即投影后: a)角度不变(正角投影),投影后经线和纬线仍然垂直; b)长度不变; c)面积不变; 大地坐标一般采用高斯正角投影,即在地球球心放一点光源,地图投影到过与中央经线相切的椭圆柱面上而成;可分带投影,按中央经线经度值分带,有每6度一带或每3度一带两种(起始带中央经线经度为均为3度,即:6度带1带位置0-6度,3度带1带位置度),即所谓的高斯-克吕格投影。 图表11高斯投影和分带 地球某点经度(L)为过该点和地球自转轴的半圆与子午线所在半圆夹角,东半球为东经,西半球为西经;地球某点纬度(B)为所在水平面法线与赤道圆面的线面角。 正算是已知大地坐标(L,B),求解高斯平面坐标(X,Y),为确保Y值为正,Y增加500公里;反算则是由高斯平面坐标(X,Y)求解大地坐标(L,B)。 二、计算模型: 地球椭球面由椭圆绕地球自转轴旋转180度而成。 图表 1 椭圆 椭圆长半轴a,椭圆短半轴b, 椭圆方程: (1) 图表2椭球面 椭球面方程: y2 a2+ x2 b2 + z2 a2 =1 /*************************************** 与网上充斥的将函数关系先展开为泰勒级数,再依据投影规则确定各参数不同,本文直接依据空间立体三角函数关系得出结果。 *****/ (一)正算 由图表1, 坐标正反算公式 一、GPS数据处理相关术语 1、三维无约束平差 三维无约束平差是以基线解算所得到的三维静态基线向量为观测值,待定参数主要为GPS 网中点的坐标;同时,利用基线解算时随基线向量一同输出的基线向量的方差阵,形成平差的随机模型,最终形成平差完整的数学模型。随后对所形成的数学模型进行求解,根据平差结果来确定观测值中是否存在粗差,数学模型是否有需要改进的部分,若存在问题,则采用相应的方法进行处理并重新进行求解;若未发现问题,则输出最终结果,并进行后续的数据处理。 2、三维约束平差 三维约束平差是以基线解算所得到的三维静态基线向量为观测值,在平差过程中引入会使GPS 网的尺度、方向和位置发生变化的外部起算数据,从而实现GPS 网成果由基线解算时GPS 卫星星历所采用的参照系(WGS84 )到特定参照系的转换,得到在特定参照系下的经过用户约束条件约束的点三维空间坐标。 二、南方GPS数据处理软件的平差方式 三维约束平差是指在基线解算后,WGS84坐标系下的三维平差,在三维平差中是不需要当地平面直角坐标系下的已知点坐标,当需要用到WGS84经纬度或空间直角坐标的用户可加载已知点的WGS84空间坐标(如果只有经纬度时,可采用COORD4.1软件进行转换,本站免费提供)进行三维约束平差,即可得到与已知点相匹配的WGS84坐标。 一般情况下,在“已知点坐标录入”窗口中,我们都没有输入WGS8坐标,而只输入当地坐标系下的已知坐标,此时GPS处理软件会自动识取一个坐标点的WGS84坐标进行约束平差。如下图: 如果在某些控制测量中,需要得到精确的WGS84经纬度或空间坐标时,让系统自动识取显然是不行的,此时我们只要为参与平差的已知点的WGS84空间坐标输入后再进行三维平差即可 在这里,我们加入了两个已知点的WGS84空间坐标,三维平差后,列表中会显示两个"固定"字样的点,说明,在进行三维平差中,我们把这两个点做为起算点,进行平差别的未知点。 坐标正反算定义及公式 Corporation standardization office #QS8QHH-HHGX8Q8-GNHHJ8 第六章→第三节→导线测量内业计算 导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。 一、坐标正算与坐标反算 1、坐标正算 已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。如图6-6 所示,点的坐标可由下式计算: 式中、为两导线点坐标之差,称为坐标增量,即: 【例题6-1】已知点A坐标,=1000、=1000、方位角=35°17'36.5",两点水平距离=200.416,计算点的坐标? 35o17'36.5"=1163.580 35o17'36.5"=1115.793 2、坐标反算 已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。可知,由下式计算水平距离与坐标方位角。 (6-3) (6-4) 式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。 【例题6-2】=3712232.528、=523620.436、=3712227.860、=523611.598,计算坐标方位角计算坐标方位角 、水平距离。 =62°09'29.4"+180°=242°09'29.4" 注意:一直线有两个方向,存在两个方位角,式中:、的计算是过A点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐标。 坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。 【例题6-3】坐标反算,已知=2365.16、=1181.77、 =1771.03、=1719.24,试计算坐标方位角、水平距离。 键入1771.03-2365.16按等号键[=]等于纵坐标增量,按储存键[], 键入1719.24-1181.77按等号键[=]等于横坐标增量,按[]键输入,按[]显示横坐标增量,按[]键输入,按第二功能键[2ndF],再按[]键,屏显为距离,再按[]键,屏显为方位角。 【例题6-4】坐标正算,已知坐标方位角=294°42'51", =200.40,试计算纵坐标增量横坐标增量。 第六章→第三节→导线测量内业计算 导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。 一、坐标正算与坐标反算 1、坐标正算 已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。如图6-6 所示,点的坐标可由下式计算: 式中、为两导线点坐标之差,称为坐标增量,即: 【例题6-1】已知点A坐标,=1000、=1000、方位角 =35°17'36.5",两点水平距离=200.416,计算点的坐标? 35o17'36.5"=1163.580 35o17'36.5"=1115.793 2、坐标反算 已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。如图6-6可知,由下式计算水平距离与坐标方位角。 (6-3) (6-4) 式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。 【例题6-2】=3712232.528、=523620.436、 =3712227.860、=523611.598,计算坐标方位角计算坐标方位角 、水平距离。 =62°09'29.4"+180°=242°09'29.4" 注意:一直线有两个方向,存在两个方位角,式中:、 的计算是过A点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐标。 坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。 【例题6-3】坐标反算,已知=2365.16、=1181.77、 =1771.03、=1719.24,试计算坐标方位角、水平距离。 键入1771.03-2365.16按等号键[=]等于纵坐标增量,按储存键[], 键入1719.24-1181.77按等号键[=]等于横坐标增量,按[]键输入,按[]显示横坐标增量,按[]键输入,按第二功能键[2ndF],再按[]键,屏显为距离,再按[]键,屏显为方位角。 【例题6-4】坐标正算,已知坐标方位角=294°42'51", =200.40,试计算纵坐标增量横坐标增量。 键入294.4251,转换为以度为单位按[DEG],按[]键输入, 坐标反算正算计算公式 一、坐标正算 根据A点的坐标X A、Y A和直线AB的水平距离D AB与坐标方位角O AB,推算B点的坐标X B、Y B,为坐标正算,其计算公式为: X B = X A + AX AB Y B = X A + AY AB(1-18 ) 二式中,AX AB与AY AB分别称为A?B的纵、横坐标增量,其计算公式为: AX AB = X B—X A = D AB COS O AB AY AB = Y B—Y A = D AB sin O AB(1-19 ) 注意,AX AB和AY AB均有正、负,其符号取决于直线AB的坐标方位角所在的象限。 二、坐标反算 根据A、B两点的坐标X A、Y A和X B、Y B,推算直线AB的水平距离D AB与坐标方位角 OCAB , 为坐标反算。其计算公式为: (1-20 ) 注意,由(1-20 )式计算OCAB时往往得到的是象限角的数值,必须先根据AX AB、AY AB的正、负号,确定直线AB所在的象限,再将象限角换算为坐标方位角。 三角函数内容规律 三角函数看似很多,很复杂,但只要掌握了三角函数的本质及内部规律就会发现 三角函数各个公式之间有强大的联系。而掌握三角函数的内部规律及本质也是学好三 角函数的关键所在. 1、三角函数本质: 三角函数的本质来源于定义,如右图: 根据右图,有 sin 0 =y/ R; cos 0 =x/R; tan 0 =y/x; cot 0 =x/y。 深刻理解了这一点,下面所有的三角公式都可以从这里出发推导出来,比如以推导 si n( A+B) = si nAcosB+cosAs inB 为例: 推导: 首先画单位圆交X轴于C,D,在单位圆上有任意A,B点。角AOD为a,BO D为B,旋转AOB使0B与0D重合,形成新A'OD。 A(cos a ,sin a ),B(cos 3 ,sin 3 ),A'(cos( - BM,sin( 诩)) OA'=OA=OB=OD=1,D(1,0) [cos( a- 3 >1]A2+[sin( a- 3 )]A2=(cos a cos 3 )A2+(sin a-sin 3 )A2 和差化积及积化和差用还原法结合上面公式可推出(换(a+b)/2与(a-b)/2 ) [1] (1-21 ) 二 计算坐标与坐标方位角的基本公式 控制测量的主要目的是通过测量和计算求出控制点的坐标,控制点的坐标是根据边长及方位角计算出来的。下面介绍计算坐标与坐标方位角的基本公式,这些公式是矿山测量工中最基本最常用的公式。 一、坐标正算和坐标反算公式 1.坐标正算 根据已知点的坐标和已知点到待定点的坐标方位角、边长计算待定点的坐标,这种计算在测量中称为坐标正算。 如图5—5所示,已知A 点的坐标为A x 、A y ,A 到B 的边长和坐标方位角分别为AB S 和AB α,则待定点B 的坐标为 AB A B AB A B y y y x x x ?+=?+= } (5—1) 式中 AB x ? 、AB y ?——坐标增量。 由图5—5可知 AB AB AB AB AB AB S y S x ααsin cos =?=? } (5—2) 式中 AB S ——水平边长; AB α——坐标方位角。 将式(5-2)代入式(5-1),则有 AB AB A B AB AB A B S y y S x x ααsin cos +=+= } (5—3) 当A 点的坐标A x 、A y 和边长AB S 及其坐标方位角AB α为已知时,就可以用上述公式计算出待定点B 的坐标。式(5—2)是计算坐标增量的基本公式,式(5—3)是计算坐标的基本公式,称为坐标正算公式。 从图5—5可以看出AB x ?是边长AB S 在x 轴上的投影长度, AB y ?是边长AB S 在 y 轴上的投影长度,边长是有向线段,是在 实地由A 量到B 得到的正值。而公式中的坐标方位角可以从0°到360°变化,根据三角函数定义,坐标方位角的正弦值和余弦值就有正负两种 情况,其正负符号取决于坐标方位角所在的象限,如图5—6所示。从式(5—2)知,由于三角函数值的正负决定了坐标增量的正负,其符号归纳成表5—3。 坐标正反算公式 欧阳光明(2021.03.07) 一、GPS数据处理相关术语 1、三维无约束平差 三维无约束平差是以基线解算所得到的三维静态基线向量为观测值,待定参数主要为 GPS 网中点的坐标;同时,利用基线解算时随基线向量一同输出的基线向量的方差阵,形成平差的随机模型,最终形成平差完整的数学模型。随后对所形成的数学模型进行求解,根据平差结果来确定观测值中是否存在粗差,数学模型是否有需要改进的部分,若存在问题,则采用相应的方法进行处理并重新进行求解;若未发现问题,则输出最终结果,并进行后续的数据处理。 2、三维约束平差 三维约束平差是以基线解算所得到的三维静态基线向量为观测值,在平差过程中引入会使 GPS 网的尺度、方向和位置发生变化的外部起算数据,从而实现 GPS 网成果由基线解算时 GPS 卫星星历所采用的参照系( WGS84 )到特定参照系的转换,得到在特定参照系下的经过用户约束条件约束的点三维空间坐标。二、南方GPS数据处理软件的平差方式 三维约束平差是指在基线解算后,WGS84坐标系下的三维平差,在三维平差中是不需要当地平面直角坐标系下的已知点坐标,当需要用到WGS84经纬度或空间直角坐标的用户可加载已知点的WGS84空间坐标(如果只有经纬度时,可采用 COORD4.1软件进行转换,本站免费提供)进行三维约束平差,即可得到与已知点相匹配的WGS84坐标。 一般情况下,在“已知点坐标录入”窗口中,我们都没有输入WGS8坐标,而只输入当地坐标系下的已知坐标,此时GPS处理软件会自动识取一个坐标点的WGS84坐标进行约束平差。如下图: 如果在某些控制测量中,需要得到精确的WGS84经纬度或空间坐标时,让系统自动识取显然是不行的,此时我们只要为参与平差的已知点的WGS84空间坐标输入后再进行三维平差即可 在这里,我们加入了两个已知点的WGS84空间坐标,三维平差后,列表中会显示两个"固定"字样的点,说明,在进行三维平差中,我们把这两个点做为起算点,进行平差别的未知点。 §8.3高斯投影坐标正反算公式 任何一种投影①坐标对应关系是最主要的;②如果是正形投影,除了满足正形投影的条件外(C-R 偏微分方程),还有它本身的特殊条件。 8.3.1高斯投影坐标正算公式: B,l ? x,y 高斯投影必须满足以下三个条件: ①中央子午线投影后为直线;②中央子午线投影后长度不变;③投影具有正形性质,即正形投影条件。 由第一条件知中央子午线东西两侧的投影必然对称于中央子午线,即(8-10)式中,x 为l 的偶函数,y 为l 的奇函数;0330'≤l ,即20/1/≈''''ρl ,如展开为l 的级数,收敛。 +++=++++=553316644220l m l m l m y l m l m l m m x (8-33) 式中 ,,10m m 是待定系数,它们都是纬度B 的函数。 由第三个条件知: q y l x l y q x ??-=????=??, (8-33)式分别对l 和q 求偏导数并代入上式 ----=++++++=+++553315 63424 42204 52 3164253l dq dm l dq dm l dq dm l m l m l m l dq dm l dq dm dq dm l m l m m (8-34) 上两式两边相等,其必要充分条件是同次幂l 前的系数应相等,即 dq dm m dq dm m dq dm m 231 20 13121? =? -== (8-35) (8-35)是一种递推公式,只要确定了 0m 就可依次确定其余各系数。 由第二条件知:位于中央子午线上的点,投影后的纵坐标x 应等于投影前从赤道量至该点的子午线弧长X ,即(8-33)式第一式中,当0=l 时有: 0m X x == (8-36) 顾及(对于中央子午线) B V M r M B N dq dB M dB dX cos cos 2 ==== 得: B V c B N r dq dB dB dX dq dX dq dm m cos cos 01===?===(8-37,38) B B N dq dB dB dm dq dm m cos sin 2 2121112=?-=?-= (8-39) 依次求得6543,,,m m m m 并代入(8-33)式,得到高斯投影正算公式 可以算任意斜交涵洞轴线的坐标,增加T为斜交角度,规定T为涵轴右侧方向与“线路前进方向切线”之间的夹角,当涵轴与线路正交时,T=90,其他操作与原程序一样; 1. 正算子程序(SUB1) [color=Red]A=0.26:B=0.74:K=0.02:L=0.82:F=1-L: M=1-K:X=U+W(Acos(G+57.2958QKW(1/P+KWD))+Bcos(G+57.2958QLW(1/P+LW D))+Bcos(G+57.2958QFW (1/P+FWD))+Acos(G+57.2958QMW(1/P+MWD))):Y=V+W(Asin(G+57.2958QKW(1/ P+KWD))+Bsin(G+ 57.2958QLW(1/P+LWD))+Bsin(G+57.2958QFW(1/P+FWD))+Asin(G+57.2958QMW (1/P+MWD))):F=G+57.2958QW(1/P+ WD)+90:X=X+Zcos(F-90+T):Y=Y+Zsin(F-90+T) 2. 反算子程序(SUB2) W=Abs((Y-V)cos(G-90)-(X-U)sin(G-90)):Z=0:Lbl 0:Prog "SUB1":L=(G-90)+5 7.2958QW(1/P+ WD):Z=(J-Y)cosL-(I-X)sinL:AbsZ<1E-6=>Goto1:≠>W=W+Z:Goto 0Δ←┘ Lbl 1:Z=0:Prog "SUB1":Z=(J-Y)÷sinF 二.增设数据库程序(SJK主程序) Lb1 4:"1.SZ => XY":"2.XY => SZ":{NS}:S∠下一线元起点里程=>O =本线元起点里程:U=本线元起点X:V=本线元起点Y:G=本线元起算方位角:H =本线元长度:P=起点曲率半径:R=终点曲率半径:Q=0或1、-1:Prog“TYQXJS”:Goto0Δ←┘(第一线元数据要素) S∠下一线元起点里程=>O=本线元起点里程:U=本线元起点X:V=本线元起点Y:G=本线元起算方位角:H=本线元长度:P=起点曲率半径:R=终点曲率半径:Q=0或1、-1:Goto0Δ←┘(第二线元数据要素) 一、坐标正算 根据A点的坐标X A、Y A和直线AB的水平距离D AB与坐标方位角αAB,推算B点的坐标X B、Y B,为坐标正算,其计算公式为: X B=X A + ΔX AB Y B=X A+ ΔY AB(1-18) 二式中,ΔX AB与ΔY AB分别称为A~B的纵、横坐标增量,其计算公式为: ΔX AB=X B-X A=D AB · cosαAB ΔY AB=Y B-Y A=D AB · sinαAB(1-19) 注意,ΔX AB和ΔY AB均有正、负,其符号取决于直线AB的坐标方位角所在的象限。 二、坐标反算 根据A、B两点的坐标X A、Y A和X B、Y B,推算直线AB的水平距离D AB与坐标方位角αAB,为坐标反算。其计算公式为: (1-20) (1-21) 注意,由(1-20)式计算αAB时往往得到的是象限角的数值,必须先根据ΔX AB、ΔY AB的正、负号,确定直线AB所在的象限,再将象限角换算为坐标方位角。 三角函数内容规律 三角函数看似很多,很复杂,但只要掌握了三角函数的本质及内部规律就会发现三角函数各个公式之间有强大的联系。而掌握三角函数的内部规律及本质也是学好三角函数的关键所在. 1、三角函数本质: 三角函数的本质来源于定义,如右图: 根据右图,有 sinθ=y/ R; cosθ=x/R; tanθ=y/x; cotθ=x/y。 深刻理解了这一点,下面所有的三角公式都可以从这里出发推导出来,比如以推导 sin(A+B) = sinAcosB+cosAsinB 为例: 推导: 首先画单位圆交X轴于C,D,在单位圆上有任意A,B点。角AOD为α,BO D为β,旋转AOB使OB与OD重合,形成新A'OD。 A(cosα,sinα),B(cosβ,sinβ),A'(cos(α-β),sin(α-β)) OA'=OA=OB=OD=1,D(1,0) ∴[cos(α-β)-1]^2+[sin(α-β)]^2=(cosα-cosβ)^2+(sinα-sinβ)^2 和差化积及积化和差用还原法结合上面公式可推出(换(a+b)/2与(a-b)/2) [1] 两角和公式 sin(A+B) = sinAcosB+cosAsinB sin(A-B) = sinAcosB-cosAsinB 一、坐标正算与坐标反算 1、坐标正算 已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。如图6-6 所示,点的坐标可由下式计算: 式中、为两导线点坐标之差,称为坐标增量,即: 【例题6-1】已知点A坐标,=1000、=1000、方位角 =35°17'36.5",两点水平距离=200.416,计算点的坐标? 35o17'36.5"=1163.580 35o17'36.5"=1115.793 2、坐标反算 已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。如图6-6可知,由下式计算水平距离与坐标方位角。 (6-3) (6-4)式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。 【例题6-2】=3712232.528、=523620.436、 =3712227.860、=523611.598,计算坐标方位角计算坐标方位角 、水平距离。 =62°09'29.4"+180°=242°09'29.4" 注意:一直线有两个方向,存在两个方位角,式中:、 的计算是过A点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐标。 坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。 【例题6-3】坐标反算,已知=2365.16、=1181.77、 =1771.03、=1719.24,试计算坐标方位角、水平距离。 键入1771.03-2365.16按等号键[=]等于纵坐标增量,按储存键[], 键入1719.24-1181.77按等号键[=]等于横坐标增量,按[]键输入,按[]显示横坐标增量,按[]键输入,按第二功能键[2ndF], 在高斯直角坐标系中,由坐标纵轴方向的北端起,顺时针量到 直线间的夹角,称为该直线的坐标方位角,常简称方位角,用a表示。 1、第一象限的方位角 X A 第四象限第一象限 a 0 Y 第三象限第二象限 图1 2、第二象限的方位角 X 第四象限第一象限 a 0 Y A 第三象限第二象限 图2 3、第三象限的方位角 4、第四象限的方位角 X 第四象限 第一象限 1 - 'o a 第三象限 第二象限 X 第四象限 第一象限 A 第三象限 第二象限 方位角计算公式: A 图4 M AO 方位角的计算器计算程序:P O I(X A-X O,Y A-Y。) 直线OA方位角度值赋予给计算器的字母J, 0< JV 360。 直线段OA的距离值赋予给计算器的字母1,1 >0 直线OA与直线AO的方位角关系: 当直线OA的方位角W 180°时,其反方位角等于a+180°。2、当直线OA的方位角〉180°时,其反方位角等于a-180 °。 二方位角的推算 (一)几个基本公式 1、坐标方位角的推算 a = a + P ± d on 前后左I 80 ziYAo *A a = tan - X.-X) 1、 或: a 前 =a 后 一 3右± 180 注意:若计算出的方位角>360°,则减去360°;若为负值,则加上 360° 例题:方位角的推算 45 、 a 51 o a 23= a 12- P 2+180° =30° -130 +180° =80已知:a 12=30 ,各观测角P 如图,求各边坐标方位角 ot 23 、 a 34、 a 解: 坐标正算 直线段的坐标计算 E 、 X a V B 厂 D ” 丿a A ” \ ' 、C 设起点0的坐标(X o ,Y ),直线OP 的方位角为F oP ,求A 、C 、E 点 的坐标 X A =X O +L X Cos(F op ) Y A 二Y o +L X Sin(F op ) 设直线段OB 长度为L OB ,直线段BC 长度为L BC ,则C 点坐标为 X B =X O +L OB X Cos(F op ) p 3+180° =80° -65 ° + 180° = 195° B4+180° = 195° -128 + 180° =247° p5+180° =247° -122 + 180° =305° p 1 + 180° =305 ° -95 + 180° =30° Ot 45= a 34- Ot 51= a 45- ot 12= a 51- (检 查) Ot 34 = a 23- 1、 设直线段OA 长度为L,则A 点坐标为 2、 高斯投影坐标正反算公式 未知2010-04-03 10:47:15 本站 §高斯投影坐标正反算公式 任何一种投影①坐标对应关系是最主要的;②如果是正形投影,除了满足正形投影的条件外( C-R 偏微分方程),还有它本身的特殊条件。 1.1 高斯投影坐标正算公式: B, x,y 高斯投影必须满足以下三个条件: ①中央子午线投影后为直线;②中央子午线投影后长度不变;③投影具有正形性质,即正形投影条件。 由第一条件知中央子午线东西两侧的投影必然对称于中央子午线,即 (8-10) 式中, x 为 的偶函数, y 为的奇函数;,即,如展开为的级数,收敛。 ( 8-33 ) 式中是待定系数,它们都是纬度 B 的函数。 由第三个条件知: (8-33) 式分别对和 q 求偏导数并代入上式 (8-34) 上两式两边相等,其必要充分条件是同次幂前的系数应相等,即 (8-35) (8-35) 是一种递推公式,只要确定了就可依次确定其余各系数。 由第二条件知 : 位于中央子午线上的点,投影后的纵坐标 x 应等于投影前从赤道量至该点的子午线弧长 X ,即 (8-33) 式第一式中,当时有: (8-36) 顾及 ( 对于中央子午线 ) 得: (8-37,38) (8-39) 依次求得并代入 (8-33) 式,得到高斯投影正算公式 (8-42) 1.2 高斯投影坐标反算公式 x,y B, 投影方程: (8-43) 满足以下三个条件: ①x 坐标轴投影后为中央子午线是投影的对称轴;② x 坐标轴投影后长度不变;③投影具有正形性质,即正形投影条件。 高斯投影坐标反算公式推导要复杂些。 ①由 x 求底点纬度 ( 垂足纬度 ), 对应的有底点处的等量纬度,求 x,y 与 的关系式,仿照 (8-10) 式有, 由于 y 和椭球半径相比较小 (1/16.37) ,可将展开为 y 的幂级数;又由于是对称投影, q 必是 y 的偶函数,必是 y 的奇函数。 (8-45) 是待定系数,它们都是 x 的函数 . 由第三条件知: , , (8-21) 坐标正反算定义及公式[精华] 第六章?第三节?导线测量内业计算 导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。 一、坐标正算与坐标反算 1、坐标正算 已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。如图6-6 所示,点的坐标可由下式计算: 式中、为两导线点坐标之差,称为坐标增量,即: 【例题6-1】已知点A坐标,=1000、=1000、方位角=35?17,36.5",两点水平距离=200.416,计算点的坐标, 35o17,36.5"=1163.580 35o17,36.5"=1115.793 2、坐标反算 已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。如图6-6 可知,由下式计算水平距离与坐标方位角。 (6-3) 4) (6- 式中反正切函数的值域是-90?,+90?,而坐标方位角为0?,360?,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。 【例题6-2】=3712232.528、=523620.436、 =3712227.860、=523611.598,计算坐标方位角计算坐标方位角 、水平距离。 =62?09,29.4"+180?=242?09,29.4" 注意:一直线有两个方向,存在两个方位角,式中:、 点坐标纵轴至直线的坐标方位角,若所求坐标方位角为的计算是过A ,则应是A点坐标减点坐标。 坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。 【例题6-3】坐标反算,已知=2365.16、=1181.77、=1771.03、=1719.24,试计算坐标方位角、水平距离。 键入1771.03-2365.16按等号键,=,等于纵坐标增量,按储存键,,, 键入1719.24-1181.77按等号键,=,等于横坐标增量,按,,键输入,按,,显示横坐标增量,按,,键输入,按第二功能键,2ndF,,再按,,键,屏显为距离,再按,,键,屏显为方位角。 【例题6-4】坐标正算,已知坐标方位角=294?42,51",=200.40,试计算纵坐标增量横坐标增量。 键入294.4251,转换为以度为单位按,DEG,,按,,键输入,键入200.40,按,,键输入,按第二功能键,2ndF,,按,,屏显,按,,屏显。 视力保护色: - 字体大小: 大中小 第六章?第三节?导线测量内业计算 二、附合导线的坐标计算 ------------------------------------------问题:观测右角, (一)角度闭合差的计算与调整 1、联测边坐标方位角计算(坐标反算) 坐标正反算定义及公 式 第六章→第三节→导线测量内业计算 导线计算的目的是要计算出导线点的坐标,计算导线测量的精度是否满足要求。首先要查实起算点的坐标、起始边的方位角,校核外业观测资料,确保外业资料的计算正确、合格无误。 一、坐标正算与坐标反算 1、坐标正算 已知点的坐标、边的方位角、两点间的水平距离,计算待定点的坐标,称为坐标正算。如图6-6 所示,点的坐标可由下式计算: 式中、为两导线点坐标之差,称为坐标增量,即: 【例题6-1】已知点A坐标,=1000、=1000、方位角=35°17'36.5",两点水平距离=200.416,计算点的坐标? 35o17'36.5"=1163.580 35o17'36.5"=1115.793 2、坐标反算 已知两点的坐标,计算两点的水平距离与坐标方位角,称为坐标反算。如图6-6 可知,由下式计算水平距离与坐标方位角。 (6-3) (6-4) 式中反正切函数的值域是-90°~+90°,而坐标方位角为0°~360°,因此坐标方位角的值,可根据、的正负号所在象限,将反正切角值换算为坐标方位角。 【例题6-2】=3712232.528、=523620.436、=3712227.860、=523611.598,计算坐标方位角计算坐标方位角、水平距离。 =62°09'29.4"+180°=242°09'29.4" 注意:一直线有两个方向,存在两个方位角,式中:、 的计算是过A点坐标纵轴至直线的坐标方位角,若所求坐标方位角为,则应是A点坐标减点坐标。 坐标正算与反算,可以利用普通科学电子计算器的极坐标和直角坐标相互转换功能计算,普通科学电子计算器的类型比较多,操作方法不相同,下面介绍一种方法。 【例题6-3】坐标反算,已知=2365.16、=1181.77、=1771.03、=1719.24,试计算坐标方位角、水平距离 。 键入1771.03-2365.16按等号键[=]等于纵坐标增量,按储存键[], 键入1719.24-1181.77按等号键[=]等于横坐标增量,按[]键输入,按[]显示横坐标增量,按[]键输入,按第二功能键[2ndF],再按[]键,屏显为距离,再按[]键,屏显为方位角。 【例题6-4】坐标正算,已知坐标方位角=294°42'51", =200.40,试计算纵坐标增量横坐标增量。 键入294.4251,转换为以度为单位按[DEG],按[]键输入,键入200.40,按[]键输入,按第二功能键[2ndF],按[]屏显,按[]屏显。 视力保护色: - 字体大小:大中小 坐标计算公式 1.坐标正算 用坐标正算计算测点X、Y坐标值(注意,全站仪测得的边长分水平距与斜距,坐标正算公式用的是水平距) 测点高程=测站高程+高差 坐标正算,就是根据直线的边长、坐标方位角和一个端点的坐标,计算直线另一个端点的坐标的工作。 编辑本段计算实例 实例1,设直线AB的边长DAB和一个端点A的坐标XA、YA为已知,则直线另一个端点B的坐标为: XB=XA+ΔXAB (5.1) YB=YA+ΔYAB (5.2) 式中,ΔXAB、ΔYAB称为坐标增量,也就是直线两端点A、B的坐标值之差。 根据三角函数,可写出坐标增量的计算公式为: ΔXAB=DAB·cosαAB (5.3) ΔYAB=DAB·sinαAB (5.4) 式中ΔX、ΔY的符号取决于方位角α所在的象限。 实例2. 已知直线B1的边长为125.36m,坐标方位角为 211°07′53〃,其中一个端点B的坐标为(1536.86 ,837.54),求直线另一个端点1的坐标X1,Y1。 解: 先代入公式(5.3)、(5.4),求出直线B1的坐标增量:ΔXB1=DB1·CosαB1=125.36×cos211°07′53〃=-107.31m ΔYB1=DB1·sinαB1=125.36×sin211°07′53〃〃=-64.81m 然后代入公式(5.1)、(5.2),求出直线另一端点1的坐标: X1=XB+ΔXB1=1536.86-107.31=1429.55m Y1=YB+ΔYB1=837.54-64.81=772.73m 坐标增量计算也常使用小型计算器计算,而且非常简单。如使用fx140等类型的计算器,可使用功能转换键INV和极坐标与直角坐标换算键P→R以及x←→y键。按键顺序为: D INV P→R α =显示ΔX X←→y 显示ΔY。 如上例,按125.36 INV P→R 211°07′53〃=显示-107.31(ΔXB1); 按x←→y 显示-64.81(ΔYB1) 追问 能不能再来一个简单的实例全数字的,不用公式代替, 参考资料: 坐标正反算vb测量程序 河北工程大学测绘1001 刘长君 以下是登陆界面和计算界面的截图: 以下就是对应的代码: 《登陆界面的代码》 Private Sub Command1_Click() If = "刘长君" And = "0" Then Unload Me Else Dim a As Integer a = MsgBox("密码输入有误,请重新输入", 1, "提示框") If a = 1 Then = "" End If End If End Sub Private Sub Command2_Click() End End Sub 《计算界面的代码》 Private Sub Command1_Click(Index As Integer) Dim a1%, a2%, a3%, a4!, a5!, pi! Const conpi = If IsNumeric(Text1(1)) = False Or IsNumeric(Text2(2)) = False Or IsNumeric(Text3(3)) = False Or IsNumeric(Text4(4)) = False Or IsNumeric(Text5(5)) = False Or IsNumeric(Text6(6)) = False Then MsgBox "输入有误" Text1(1).SetFocus Else If Val(Trim(Text5(5).Text)) > 60 Or Val(Trim(Text5(5).Text)) < 0 Or Val(Trim(Text6(6).Text)) > 60 Or Val(Trim(Text6(6).Text)) < 0 Then MsgBox "方位角输入有误,请重新输入" Text4(4).SetFocus Text4(4).Text = "" Text5(5).Text = "" Text6(6).Text = "" End If a1 = Val(Text4(4).Text) a2 = Val(Text5(5).Text) a3 = Val(Text6(6).Text) a4 = a1 + a2 / 60 + a3 / 3600 a5 = a4 * conpi / 180 = Val(Text3(3).Text) * Cos(a5) = Val(Text3(3).Text) * Sin(a5) = Val(Text1(1).Text) + Val = Val(Text2(2).Text) + Val = Format((Val * 10000 + / 10000, "####.0000") = Format((Val * 10000 + / 10000, "####.0000") = Format((Val * 10000 + / 10000, "####.0000") = Format((Val * 10000 + / 10000, "####.0000") End If End Sub高斯投影正反算公式 新
坐标正反算计算公式
坐标正反算定义及公式
坐标正反算定义附公式
坐标反算正算计算公式
计算坐标与坐标方位角基本公式
2021年坐标正反算计算公式
高斯投影正反算公式83
卡西欧计算器坐标的正反算
坐标正算与反算
坐标正反算
坐标正算反算公式讲解..
高斯投影坐标正反算公式
坐标正反算定义及公式[精华]
最新坐标正反算定义及公式
坐标计算公式
坐标正反算vb测量程序