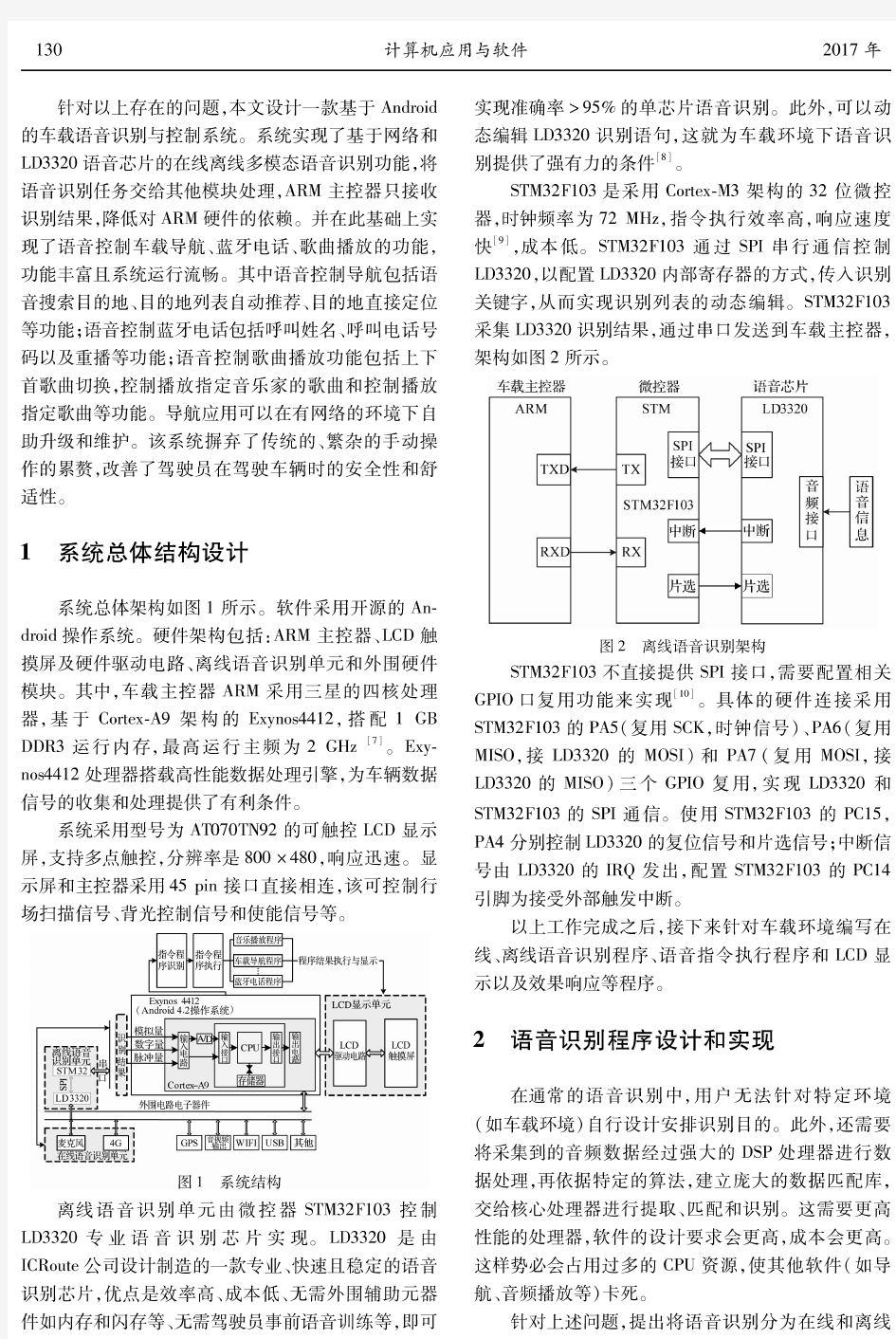
车载语音识别及控制系统的设计与实现

单片机语音识别程序
最近想做语音识别玩玩,网上查了查,找到一个用Atmega32实现的语音识别机械车 地址是:https://www.360docs.net/doc/fb14513839.html,/e ... h8_css34/index.html 貌似是利用带通滤波取得频谱(或者叫功率谱?),看不太懂.我决定用DFT 算法,因为它节约内存 DFT程序借借鉴了 hendry 单片机 DTMF 软解码算法的实现 https://www.360docs.net/doc/fb14513839.html,/forum.php?m ... &highlight=dtmf //-------------------------------------------------- //DFT运算 //注意,ad是有符号数,无符号的AD值需减128 //返回值为1表示已经计算了功率谱 //-------------------------------------------------- U8 dft(S8 ad) { U8 i; U8 offset;//查表指针 U32 temp; //ad-=128;//去直流分量 for(i=0;i
语音识别实验2
关于语音识别的研究 网络工程专业网络C071班贾鸿姗 076040 摘要:语音识别技术的广泛应用 1前言: 语音识别技术也被称为自动语音识别 (ASR),其目标是将人类的语音中的词汇内容转换为计算机可读的输入,例如按键、二进制编码或者字符序列。与说话人识别及说话人确认不同,后者尝试识别或确认发出语音的说话人而非其中所包含的词汇内容。语音识别是一门交叉学科。近二十年来,语音识别技术取得显著进步,开始从实验室走向市场。人们预计,未来10年内,语音识别技术将进入工业、家电、通信、汽车电子、医疗、家庭服务、消费电子产品等各个领域。语音识别技术所涉及的领域包括:信号处理、模式识别、概率论和信息论、发声机理和听觉机理、人工智能等等。 早在计算机发明之前,自动语音识别的设想就已经被提上了议事日程,早期的声码器可被视作语音识别及合成的雏形。而1920年代生产的"Radio Rex"玩具狗可能是最早的语音识别器,当这只狗的名字被呼唤的时候,它能够从底座上弹出来。最早的基于电子计算机的语音识别系统是由AT&T 贝尔实验室开发的Audrey语音识别系统,它能够识别10个英文数字。其识别方法是跟踪语音中的共振峰。该系统得到了98%的正确率。。到1950年代末,伦敦学院(Colledge of London)的Denes 已经将语法概率加入语音识别中。 1960年代,人工神经网络被引入了语音识别。这一时代的两大突破是线性预测编码Linear Predictive Coding (LPC),及动态时间弯折Dynamic Time Warp技术。 语音识别技术的最重大突破是隐含马尔科夫模型Hidden Markov Model的应用。从Baum提出相关数学推理,经过Labiner等人的研究,卡内基梅隆大学的李开复最终实现了第一个基于隐马尔科夫模型的大词汇量语音识别系统Sphinx。。此后严格来说语音识别技术并没有脱离HMM框架。 尽管多年来研究人员一直尝试将“听写机”推广,语音识别技术在目前还无法支持无限领域,无限说话人的听写机应用。 2 正文 2.1应用领域 2.1.1.电话通信的语音拨号 特别是在中、高档移动电话上,现已普遍的具有语音拨号的功能。随着语音识别芯片的价格降低,普通电话上也将具备语音拨号的功能。 2.1.2.汽车的语音控制 由于在汽车的行驶过程中,驾驶员的手必须放在方向盘上,因此在汽车上拨打电话,需要使用具有语音拨号功能的免提电话通信方式。此外,对汽车的卫星导航定位系统(GPS)的操作,汽车空调、照明以及音响等设备的操作,同样也可以由语音来方便的控制。 工业控制及医疗领域。当操作人员的眼或手已经被占用的情况下,在增加控制操作时,最好的办法就是增加人与机器的语音交互界面。由语音对机器发出命令,机器用语音做出应答。 2.1.3数字助理 个人数字助理(Personal Digital Assistant,PDA)的语音交互界面。PDA的体积很小,人机界面一直是其应用和技术的瓶颈之一。由于在PDA上使用键盘非常不便,因此,现多采用手写体识别的方法输入和查询信息。但是,这种方法仍然让用户感到很不方便。现在业界一致认为,PDA的最佳人机交互界面是以语音作为传输介质的交互方法,并且已有少量应用。随着语音识别技术的提高,可以预见,在不久的将来,语音将成为PDA主要的人机交互界面。 智能玩具 通过语音识别技术,我们可以与智能娃娃对话,可以用语音对玩具发出命令,让其完成一些简单的任务,甚至可以制造具有语音锁功能的电子看门狗。智能玩具有很大的市场潜力,而其关键在
汽车车速检测系统设计
目录 摘要 (1) 关键词 (1) Abstract (1) Key words (1) 引言 (2) 1 论文综述 (2) 1.1 车速检测系统的背景和意义 (2) 1.2 车速检测系统的发展前景 (3) 2 车速检测系统的设计思路 (3) 3 系统单元模块选型 (3) 3.1传感器选择 (3) 3.2 单片机选型 (4) 3.3 显示模块的选型 (4) 3.4 报警电路选择 (5) 3.5 程序语言的选择 (5) 4 系统硬件设计 (6) 4.1 AT89C51主控电路 (6) 4.1.1 AT89C51的管脚说明 (6) 4.1.2 复位电路 (7) 4.1.3 晶振电路 (8) 4.1.4 存储器AT24CO2 (9) 4.2 传感器电路模块介绍 (9) 4.2.1 霍尔式车速传感器 (10) 4.2.2 霍尔传感器的特性 (11) 4.2.3 霍尔传感器引脚说明 (12) 4.2.4 霍尔传感器车速测量原理 (12) 4.2.5 霍尔传感器的转速测量方法 (12) 4.2.6 霍尔传感器设计电路 (12) 4.3 显示模块的介绍 (13) 4.3.1 LED数码管介绍 (13) 4.3.2 LED数码管特性 (13)
4.3.3 74HC573作用………………………………………………………………………… 13 4 4.3.4 显示电路 (13) 4.4 DM74LS14工作原理 (17) 4.4.1 信号处理电路设计 (17) 4.5 硬件总体设计 (17) 5 软件设计 (19) 6 总结 (19) 参考文献 (20) 附录A (21) 附录B (22) 致谢 (29)
基于语音识别的智能小车设计-毕设论文
基于语音识别的智能小车 摘要 随着计算机技术、模式识别和信号处理技术及声学技术等的发展,使得能满足各种需要的语音识别系统的实现成为可能。近二三十年来,语音识别在计算机、信息处理、通信与电子系统、自动控制等领域中有着越来越广泛的应用。本设计是语音识别在控制领域的一个很好实现,它将原本需要手工操作的工作用语音来方便地完成。 语音识别按说话人的讲话方式可分为孤立词(Isolated Word)识别、连接词(Connected Word)识别和连续语音(Continuous Speech)识别。从识别对象的类型来看,语音识别可以分为特定人(Speaker Dependent)语音识别和非特定人(Speaker Independent)语音识别。本设计采用的识别类型是特定人孤立词语音识别。 本系统分上位机和下位机两大方面。上位机利用PC上MATLAB强大的数学计算能力,进行语音输入、端点监测、特征参数提取、匹配、串口控制等工作,根据识别到的不同语音通过PC串口向下位机发送不同的指令。下位机是单片机控制的一个小车,单片机收到上位机传来的指令后,根据不同的指令控制小车完成不同的动作。 该设计对语音识别的现有算法进行了验证和实现,并对端点检测和匹配算法进行了些许改进。本设计达到了预期目标,实现了所期望的功能效果。 关键词:MATLAB,语音识别,端点检测,LPC,单片机,电机控制
SMART CAR GASED SPEECH RECOGNITION ABSTRACT With the development of computer technology,pattern recognition,signal processing technology and acoustic technology etc, the speech recognition system that can meet the various needs of people is more possible to achieve.The past three decades, the voice recognition in the field of computer, information processing, communications and electronic systems, automatic control has increasingly wide range of applications. Speech recognition by the speaker's speech can be divided into isolated word (Isolated Word) identification, conjunctions (Connected Word) and continuous speech recognition (Continuous Speech) identification. Identifying the type of object from the point of view, the voice recognition can be divided into a specific person (Speaker Dependent) speech recognition and non-specific (Speaker Independent) speech recognition. This design uses the identification type is a specific person isolated word speech recognition. This design is of a good implementation of speech recognition in the control field, it does the work that would otherwise require manual operation by the voice of people easily.This system includes two major aspects:the host system and the slave system. The host system use the MATLAB on the computer which has powerful mathematical computing ability to do the work of voice input, endpoint monitoring, feature extraction, matching, identification and serial control,then it send different commands through the PC serial port to slave system according different recognised voice. The slave system is a car controlled by a single-chip micro-controller.It controls the car do different actions according different instructions received.
基于单片机的语音识别系统 毕业设计
基于单片机的语音识别系统毕业设计 目录 摘要..................................... 错误!未定义书签。Abstract ................................. 错误!未定义书签。目录..................................................... I 前言.. (1) 1 方案介绍及设计简介 (2) 1.1小车的控制要求及设计方案 (2) 1.1.1小车的控制要求 (2) 1.1.2方案设计与论证 (2) 1.2SPCE061A 简介 (3) 1.2.1SPCE061A单片机概述 (5) 1.2.2SPCE061A的介绍 (7) 1.2.3SPCE061A的结构 (7) 1.3SPCE061A 单片机强大的语音功能 (7) 1.3.1语音识别的原理 (8) 1.3.2系统的结构框图 (9) 1.4语音控制小车设计要求 (10) 1.4.1功能要求 (10) 1.4.2语音控制小车的主要功能 (10) 1.4.3参数说明 (10) 1.4.4注意事项 (10) 2电路设计及程序设计 (11) 2.1电路设计基础知识 (11) 2.2电路方框图及说明 (13) 2.3各部分电路设计 (13) 2.3.1电机的选择 (14)
2.3.2继电器驱动电路的设计 (14) 2.3.3行驶状态控制电路设计 (15) 2.3.4麦克录音输入及AGC电路 (16) 2.3.5语音播报电路 (18) 3软件设计 (19) 3.1软件流程图及设计思路说明 (19) 3.1.1程序设计 (20) 3.2模块设计 (20) 3.2.1中断流程图部分 (20) 3.2.2语音识别部分 (22) 4连接和操作说明 (25) 4.1硬件模块连接图 (25) 4.1.1功能说明 (25) 4.1.2代码下载 (26) 4.1.3训练小车 (27) 4.1.4声控小车 (28) 4.1.5重新训练 (28) 总结 (30) 致谢 (31) 参考文献 (32) 附件1 系统程序说明 (33)
宝马中文声控语音识别控制系统
BMW中文声控系统 声控启动语音控制支持方言专车专用 宝马中文声控系统市场前景 在庞大的汽车销量的基础上,车载语音系统已成为现代汽车的重要亮点之一,但是由于技术的局限性,国内车载语音系统的发展始终比较缓慢,在国外广泛发展的车载语音控制系统在国内却处于技术空白阶段。现在,Qdis-isods让这种情况得到了根本性的改变。 qdis品牌联合众多院校精英,由多名各领域资深人士参与研发,根据中国市场特点以及中国用户使用习惯进行特殊定制,成功推出Qdis-isods系列产品,为广大车主提供车载语音控制的解决方案和专业服务。加载Qdis-isods车载语音系统后,用户用自己的声音即可完成相关操作,而不再只是使用传统的指定命令。 Qdis-isods系列产品支持中国多种方言,声音识别准确率高并支持多人识别,一举攻克了之前的技术难题,让车载语音系统全面进入中国市场。以前需要手动操作的控制,现在您和爱车直接对话就能实现,而且还能语音识别并控制后装增配的产品,满足客户多种智能语音操作的需求。随着车联网技术的发展,汽车的互联性会越来越强,我们可以把语音技术扩展到除终端和嵌入式系统以外的所有设备上,从而完成更复杂的识别控制任务。我们依然在不断创新实践,以谋求更多的成功案例。 Qdis-isods车载语音系统可以完美支持各类车型,金鼓德达将以一贯优秀的无损加装技术,让您在驾驶生活中发现更多乐趣。QDIS-ISODS系列,爱车从此智能! 一、BMW中文声控系统主要功能 1.语音识别启动引擎 语音指令随时学习,支持所有方言,指令内容可以自由定义; 不影响原车启动键启动功能; 可以同时利用方向盘按键组合为密码启动; 语言指令和方向盘密码可以任意修改; 2.语音指令控制原车 语音指令随时学习,支持所有方言,指令内容可以自由定义;
智能小车设计报告
智能小车 学校:江汉大学 学院:物信学院 班级、姓名: 10通信曹聪慧 10自二彭洋
摘要: 本系统采用STC89C52作为主控制芯片,采用7805作为稳压芯片,采用L9110芯片作为直流电机驱动,在PWM 控制下,小车自动寻路,快慢速行驶和转向。三者的结合使小车更加智能化,自动化,并用霍尔元件测速,用1602液晶把速度显示出来。电路结构简单,可靠性能高。 关键词:STC89C52单片机、PWM调速、自动循迹,测速
目录 1.系统方案 (4) 1.1 车体设计 (4) 1.2 控制器模块 (4) 1.3电机模块 (4) 1.4电机驱动模块 (5) 1.5测速模块 (5) 1.6电源模块 (5) 1.7最终方案 (6) 2.系统硬件设计 (7) 2.1电源模块的设计 (7) 2.1控制模块的设计 (6) 2.1循迹模块的设计 (6) 2.1电机驱动模块的设计 (7) 2.1测速模块的设计 (7) 3.软件程序的设计 (10) 3.1总体流程图 (10) 3.2软件大体思路 (10) 4.系统功能测试 (9) 4.1 问题分析及解决 (10) 5.总结 (12) (附录)
系统方案 1.1 车体设计 自己制作电动车。一般的说来,自己制作的车体比较粗糙,性能不太稳定。但只要对车体仔细制作,通过优良的控制算法,也能实现控制小车前进转弯的功能。 1.2 控制器模块 采用STC公司的STC89C52单片机作为主控制器。STC89C52是一个低功耗,高性能的51内核的CMOS 8位单片机,片内含8k空间的可反复擦些1000次的Flash只读存储器,具有256 bytes的随机存取数据存储器(RAM),32个IO口,2个16位可编程定时计数器。且该系列的51单片机可以不用烧写器而直接用串口或并口就可以向单片机中下载程序。我们自己制作51最小系统板,体积很小,下载程序方便,放在车上不会占用太多的空间。 1.3电机模块 方案一:采用步进电机实现物体的精确定位和方向控制。步进电机可以作为一种控制用的特种电机,可以精确地控制角度和距离。缺点是相对体积较大,力矩比较小,容易失步,而且价格比较昂贵。 方案二:采用普通直流电机。直流电机运转平稳,精度有一定的保证。直流电机控制的精确度虽然没有步进电机那样高,但完全可以满足本题目的要求。通过单片机的PWM输出同样可以控制直流电机的旋转速度,实现电动车的速度控制。并且直流电机相对于步进电机
语音控制的智能小车设计方案
语音控制的智能小车设计方案 根据美国玩具协会的调查统计,近年来全世界玩具销量增幅与全世界平均GDP增幅大致相当而全世界玩具市场的内在结构比重却发生了重大变化:传统玩具的市场比重正在逐步缩水,高科技含量的电子玩具则蒸蒸日上 美国玩具市场的高科技电子玩具的年销售额2004年较2003年增长52%,而传统玩具的年销售额仅增长3%英国玩具零售商协会选出的2001年圣诞最受欢迎的十大玩具中,有七款玩具配有电子元件从这些数字可以看出,高科技含量的电子互动式玩具已经成为玩具行业发展的主流本文设计一个具有语音识别功能的智能遥控小车该小车对传统的手动遥控小车的机械部分做了改进使之可以实现任意角度转向和以任意速度前进而不象一般的小车那样只能以固定角度转向和以固定速度前进因此更加接近真实的车辆 本文还在小车的控制系统中采用语音识别系统,使控制者可以用语音对小车进行控制,产生相应的动作,而且小车和控制者还具有一定的交互功能 1 智能小车总体结构框图 智能小车主要由转向机构、驱动机构、转向控制模块、驱动控制模块、遥控模块和语音控制模块六大部分组成,如图1所示
2 机械本体结构及工作原理 小车为轮式结构,如图2所示机械部分分为转向机构(图中椭圆内的部分)和驱动机构(图中椭圆外部分)转向机构主要由转向电机、转向架和两个前轮组成驱动机构采用玩具小车常用的双电机驱动方案,包括两个减速电机和两个后轮转向机构工作原理为:转向时由控制者向小车发出转向信号,转向电机根据转向信号正向或反向旋转一定角度,电机通过齿轮、齿条系统带动转向架摆动一定角度,最终带动与转向架固定在一起的前轮偏摆一定角度小车在转向时由于内、外侧的车轮的转弯半径不同,所以内外侧车轮的转速也不相同前轮为从动轮,会根据转弯角度的大小自动调节内、外侧车轮的转速;而后轮为主动轮,其转速分别由两个电机独立驱动,不会根据转弯半径自动调节转速因此小车转弯时,控制系统在控制转向电机的同时还需要根据转向角度的大小向两个驱动电机发出控制信号,
语音识别基本知识及单元模块方案设计
语音识别是以语音为研究对象,通过语音信号处理和模式识别让机器自动识别和理解人类口述的语言。语音识别技术就是让机器通过识别和理解过程把语音信号转变为相应的文本或命令的高技术。语音识别是一门涉及面很广的交叉学科,它与声学、语音学、语言学、信息理论、模式识别理论以及神经生物学等学科都有非常密切的关系。语音识别技术正逐步成为计算机信息处理技术中的关键技术,语音技术的应用已经成为一个具有竞争性的新兴高技术产业。 1语音识别的基本原理 语音识别系统本质上是一种模式识别系统,包括特征提取、模式匹配、参考模式库等三个基本单元,它的基本结构如下图所示: 未知语音经过话筒变换成电信号后加在识别系统的输入端,首先经过预处理,再根据人的语音特点建立语音模型,对输入的语音信号进行分析,并抽取所需的特征,在此基础上建立语音识别所需的模板。而计算机在识别过程中要根据语音识别的模型,将计算机中存放的语音模板与输入的语音信号的特征进行比较,根据一定的搜索和匹配策略,找出一系列最优的与输入语音匹配的模板。然后根据此模板的定义,通过查表就可以给出计算机的识别结果。显然,这种最优的结果与特征的选择、语音模型的好坏、模板是否准确都有直接的关系。2语音识别的方法 目前具有代表性的语音识别方法主要有动态时间规整技术(DTW)、隐马尔可夫模型(HMM)、矢量量化(VQ)、人工神经网络(ANN)、支持向量机(SVM)等方法。 动态时间规整算法(Dynamic Time Warping,DTW)是在非特定人语音识别中一种简单有效的方法,该算法基于动态规划的思想,解决了发音长短不一的模板匹配问题,是语音识别技术中出现较早、较常用的一种算法。在应用DTW算法进行语音识别时,就是将已经预处理和分帧过的语音测试信号和参考语音模板进行比较以获取他们之间的相似度,按照某种距离测度得出两模板间的相似程度并选择最佳路径。 隐马尔可夫模型(HMM)是语音信号处理中的一种统计模型,是由Markov链演变来的,所以它是基于参数模型的统计识别方法。由于其模式库是通过反复训练形成的与训练输出信号吻合概率最大的最佳模型参数而不是预先储存好的模式样本,且其识别过程中运用待识别语音序列与HMM参数之间的似然概率达到最大值所对应的最佳状态序列作为识别输出,因此是较理想的语音识别模型。 矢量量化(Vector Quantization)是一种重要的信号压缩方法。与HMM相比,矢量量化主要适用于小词汇量、孤立词的语音识别中。其过程是将若干个语音信号波形或特征参数的标量数据组成一个矢量在多维空间进行整体量化。把矢量空间分成若干个小区域,每个小区域寻找一个代表矢量,量化时落入小区域的矢量就用这个代表矢量代替。矢量量化器的设计就是从大量信号样本中训练出好的码书,从实际效果出发寻找到好的失真测度定义公式,设计出最佳的矢量量化系统,用最少的搜索和计算失真的运算量实现最大可能的平均信噪比。在实际的应用过程中,人们还研究了多种降低复杂度的方法,包括无记忆的矢量量化、有记忆的矢量量化和模糊矢量量化方法。 人工神经网络(ANN)是20世纪80年代末期提出的一种新的语音识别方法。其本质上是一
用单片机实现语音控制机器人
用单片机实现语音控制机器人 制作人:潘磊pb02023035 卢恒pb02006088 题目:用凌阳单片机实现语音识别功能并传递给PIC单片机信号,由PIC单片机控制机器人实现动作 关键字:PIC单片机,凌阳单片机,语音控制 单片机在现今生活中占有越来越重要的地位,用语音控制单片机实现控制更具有 广泛的应用价值。用语音控制舞蹈机器人做一些动作是我们这次实现的功能,虽然这 在语音控制方面仍处于起步阶段,但他体现了语音控制的原理和基本实现,也为更高 级的运用打下了基础。 原理: 1.语音识别原理 语音识别电路基本结构如上图所示:语音识别分为特定发音人识别(Speaker Dependent)和非特定发音人识别(Speaker Independent)两种方式。 特定发音人识别是指语音样板由单个人训练,对训练人的语音命令识别准确率较高,而其他人的语音命令识别准确率较低或不识别。非特定发音人识别:是指语音样板由不同年龄、不同性别、不同口音的人进行训练,可以识别一群人的命令。语音样板的提取非常重要。我们将标准模式的存储空间称之为“词库”,而把标准模式称之为“词条”或“样板”。所谓建立词库,就是将待识别的命令进行频谱分析,提取特征参数作为识别的标准模式。 识别过程首先要滤除输入语音信号的噪音和进行预加重处理,提升高频分量,然后用线性预测系数等方法进行频谱分析,找出语音的特征参数作为未知模式,接着与预先存储的标准模式进行比较,当输入的未知模式与标准模式的特征相一致时,便被机器识别,产生识别结果输出。如果输入的语音与标准模式的特征完全一致固然好,但是语音含有不确定因素,完全一致的条件往往不存在,事实上没有人能以绝对相同的语调把一个词说两遍,因此,预先制定好计算输入语音的特征模式与各特征模式的类似程度,或距离度的算法规则固化在ROM
智能小车控制系统设计
智能小车控制系统设计 ——ARM控制模块设计 EasyARM615是一款基于32位ARM处理器,集学习和研发于一体的入门级开发套件,该套件采用Luminary Micro(流明诺瑞)公司生产的Stellaris系列微控制器LM3S615。本系统设计是以EasyARM615开发板为核心,通过灰度传感器检测路面上的黑线,运用PWM直流电机调速技术,完成对小车运动轨迹等一系列的控制。同时利用外扩的液晶显示器显示出各个参数。以达到一个简易的智能小车。 本文叙述了系统的设计原理及方法,讨论了ISR集成开发环境的使用,系统调试过程中出现的问题及解决方法。 据观察,普通的玩具小车一般需要在外加条件下才能按照自己的的设想轨迹去行驶,而目前可借助嵌入式技术让小车无需外加条件便可完成智能化。在小车行驶之前所需作的准备工作是在地面上布好黑线轨迹,设计好的小车便可按此黑线行驶,即为智能小车。其设计流程如下: 1、电机模块 采用由达林顿管组成的H型PWM电路。PWM电路由四个大功率晶体管组成,H桥电路构成,四个晶体管分为两组,交替导通和截止,用单片机控制达林顿管使之工作在开关状态,根据调整输入控制脉冲的占空比,精确调整电机转速。这种电路由于管子工作只在饱和和截止状态下,效率非常没。H型电路使实现转速和方向的控制简单化,且电子开关的速度很快,稳定性也极强,是一种广泛采用的PWM调整技术。 具体电路如下图所示。本电路采用的是基于PWM原理的H型驱动电路。该电路采用TIP132大功率达林顿管,以保证电动机启动瞬间的8安培电流要求。
2、传感器模块 灰度测量模块,是一种能够区分出不同颜色的的电子部件。灰度测量模块是专为机器人设计的灰度传感器。例如:沿着黑色轨迹线行走,不偏离黑色轨迹线;沿着桌面边沿行走,不掉到地上,等等。足球比赛时,识别场地中灰度不同的地面,以便于进行定位。不同的物体对红外线的反射率不同,黑色最低,白色最高;它通过发射红外线并测量红外线被反射的强度来输出反映物体颜色的电压信号,有效距离3-30毫米。 其技术规格如下: 已知灰度传感器的输出电压为0-3.3V,所以可通过ARM615开发板上的ADC 模块转换成数字信号,最后通过不断测试得出黑线与白线的大概参数值,完成对小车传感器部分的设计。 在本次设计中选择二个灰度传感器,其实现效果与布局如下所示。
基于语音识别技术的智能家居控制系统的设计
基于语音识别技术的智能家居控制系统的 设计 基于语音辨认技术的智能家居控制系统的设计摘要 21 世纪经济快速发展,人们对物资文化的需求也愈来愈高。在信息科技的支持下,事物在朝着简单化、便捷化、智能化的方向发展。在此背景下应运而生而生的智能家居,正是信息时期的典型产物。 本文设计了1套基于语音辨认技术的智能家居控制系统,能够在客户端输入语音信号,完成对家居装备的控制,使得家居装备更加智能化。本文首先对语音辨认的相干理论知识进行了详细的论述,利用麻省理工学院(Massachusetts Institute of Technology, MIT)语音服务器完成对语音信号的特点提取和辨认进程,并且该服务器内有自动的高频噪声滤波器,避免声音信号产生失真现象。其次Zigbee模块完成了数据传输的功能,能够在网络拓扑较为稳定的家 居环境中实现对数据的传输,消耗的功率下降,本钱也较低。最后基于安卓手机到达控制家具的目的,在手机客户端输入语音信号以后,服务器将翻译出来的语音信息传递给后台,由手机通过无线网络传递给家居装备,从而到达传递控制指令的目的。最后本文在测试阶段对本文设计的基于语音辨认技术的智能家居控制系统进行了性能测试,测试结果良好,能够到达预期的目标。 关键词:智能家居;语音辨认;控制系统 Abstract With the rapid development of the economy in the 21st century, people's demand for material culture is also increasing. With the support of information technology, things are developing in the direction of simplification, convenience and intelligence. The smart home that emerged in this context is
区间测速方案分解
卡口区间测速系统设计方案 设 计 方 案 书 技术股份有限公司 二00九年五月
1 区间测速系统 1.1概述 传统超速抓拍系统采用的是单点测速方式,测量的是车辆的瞬时速度,争议较大、容易躲避。区间测速是在高速公路某一区间(一般为20公里左右)的两端安装自动抓拍系统,记录车辆通过两端的时间,利用“速度=距离/时间”公式,计算出车辆在该区间内的平均车速。为达到满意的效果,抓拍系统应具有很高的车辆捕获率和识别正确率。区间测速让驾驶员难以回避,做为处罚超速违法行为的法律依据将更有说服力。区间测速与单点测速相比有如下优势: 1.监控范围大。区间测速系统由于对监控路面进行长距离监控,对该区间内行驶的机动车进行全程监控,扩大了超速监控的范围,控制了区间内整体的行车速度。 2.测速精度高。区间距离为两个监测断面之间的距离,通过激光测量标定,距离误差几乎为零;机动车行驶时间为经过两个监测断面的时间差,所有断面点设备时间同步,并采用GPS时钟校时,时间误差小。 3.“反监控”能力强、监控效果显著。机动车驾驶员常利用电子狗等高科技设备提前发现电子警察并进行逃避;在单点测速或监控点周边地段刹车减速,经过监控点后继续超速行驶;这类具有反监控能力的违法超速车,在区间测速系统监控下将无所遁形。 4.说服力强,更容易被理解和接受。区间测速系统测速原理简单,精度高,监控范围为全区间,控制区间内的平均车速,更容易被驾驶人接受。 5.可拓展性更强。根据应用的需要,区间测速系统可以扩展更多的应用功能,如:道路监控功能、治安(交通)卡口功能、交通流采集功能、非法占用路肩等违法取证功能(路肩加设备)、交通诱导功能(加诱导屏)等。
基于单片机的语音控制小车设计毕业论文
基于单片机的语音控制小车设计毕业论文 目录 摘要........................................................................ I Abstract................................................................... II 第1章绪论........................................................... - 1 - 1.1 选题的目的和意义............................................... - 1 - 1.1.1选题目的................................................... - 1 - 1.1. 2.选题意义................................................... - 1 - 1.2 语音小车的发展及现状........................................... - 1 - 1.3 课题的目的任务和要求........................................... - 2 - 第2章语音小车的方案论证............................................... - 3 - 2.1 语音控制方案................................................... - 3 - 2.2 方案论证....................................................... - 4 - 2.2.1 采用DSP+FPGA方案.......................................... - 4 - 2.2.2采用MCS-51方案............................................ - 4 - 2.2.3 采用凌阳61方案............................................ - 5 - 2.3 系统控制方案................................................... - 6 - 第3章系统硬件设计..................................................... - 9 - 3.1 系统硬件总体设计............................................... - 9 -
【完整版】基于Matlab的语音识别系统的设计本科毕业论文设计
摘要 语音识别主要是让机器听懂人说的话,即在各种情况下,准确地识别出语音的内容,从而根据其信息执行人的各种意图。语音识别技术既是国际竞争的一项重要技术,也是每一个国家经济发展不可缺少的重要技术支撑。本文基于语音信号产生的数学模型,从时域、频域出发对语音信号进行分析,论述了语音识别的基本理论。在此基础上讨论了语音识别的五种算法:动态时间伸缩算法(Dynamic Time Warping,DTW)、基于规则的人工智能方法、人工神经网络(Artificial Neural Network,ANN)方法、隐马尔可夫(Hidden Markov Model,HMM)方法、HMM和ANN的混合模型。重点是从理论上研究隐马尔可夫(HMM)模型算法,对经典的HMM模型算法进行改进。 语音识别算法有多种实现方案,本文采取的方法是利用Matlab强大的数学运算能力,实现孤立语音信号的识别。Matlab 是一款功能强大的数学软件,它附带大量的信号处理工具箱为信号分析研究,特别是文中主要探讨的声波分析研究带来极大便利。本文应用隐马尔科夫模型(HMM) 为识别算法,采用MFCC(MEL频率倒谱系数)为主要语音特征参数,建立了一个汉语数字语音识别系统,其中包括语音信号的预处理、特征参数的提取、识别模板的训练、识别匹配算法;同时,提出利用Matlab图形用户界面开发环境设计语音识别系统界面,设计简单,使用方便,系统界面友好。经过统计,识别效果明显达到了预期目标。 关键词:语音识别算法;HMM模型;Matlab;GUI ABSTRACT Speech Recognition is designed to allow machines to understand what people say,and accurately identify the contents of voice to execute the intent of people.Speech recognition technology is not only an important internationally competed technology,but also an indispensable foundational technology for the national economic development.Based on the mathematical model from the speech signal,this paper analyze audio signal from the time
基于单片机的智能语音识别系统设计毕业设计论文
基于单片机的智能语音识别系统设计 (硬件部分) 系别: 专业班: 姓名: 学号: 指导教师:
基于单片机的智能语音识别系统设计 (硬件部分) The Design of Intelligent Speech Recognition System Based on Single-chip Computer (HardWare)
摘要 本文设计一个让机器通过识别和理解过程把语音信号转变为相应的文本或命令的高技术的语音识别系统。本语音识别系统以LD3320语音识别芯片为核心部件,主控MCU选用STC10L08XE。主控MCU通过控制LD3320内部寄存器以及SPI flash实现语音识别和对话。通过麦克风将声音信息输入LD3320进行频谱分析,分析后将提取到的语音特征和关键词语列表中的关键词语进行对比匹配,找出得分最高的关键词语作为识别结果输出给MCU,MCU针对不同的语音输入情况通过继电器对语音命令所对应的电器实现控制。同时也可以通过对寄存器中语音片段的调用,实现人机对话。 设计中,电源模块采用3.3V供电,主要控制及识别部分采用LM1117-3.3稳压芯片,语音播放及继电器部分采用7812为其提供稳定的电流电压。寄存器采用一片华邦SPI flash芯片W25Q40AVSNIG,大小为512Kbyte。系统声音接收模块采用的传感器为一小型麦克风——驻极体话筒,在它接收到声音信号后会产生微弱的电压信号并送给MCU。另外系统还采用单片机产生不同的频率信号驱动蜂鸣器来完成声音提示,此方案能完成声音提示功能,给人以提示的可懂性不高,但在一定程度上能满足要求,而且易于实现,成本也不高。 关键词:语音识别 LD3320 STC10L08XE单片机频谱分析
智能小车控制系统开题
毕业设计(论文)开题报告 题目智能小车控制系统研究 系部车辆工程系 专业 学生姓名学号 指导教师职称讲师 毕设地点 2016年1 月16 日
1.结合毕业设计(论文)课题任务情况,根据所查阅的文献资料,撰写1500~2000字左右的文献 综述: 一丶选题背景 智能汽车的概念在上世纪80 年代初由美国提出,随着智能控制算法的不断发展,以及硬件设备的快速更新,对智能车的发展起到了巨大的促进作用。同时交通问题也逐渐成为世界各个国家都要面临的重要问题,这也加快了新技术、新方法的应用。在这样的背景下智能车的研究逐渐成为新的热点。 当前世界公路的总里程每年都在高速增长,同时汽车的总量也在成倍增加,其中我国的增量更是非常明显,随着汽车的越来越多,出现交通事故的概率也在不断提高。世界各国为了解决这方面的问题提出了很多的想法,而智能车是众多想法中最可行的一种解决当前问题的方法。许多国家在无人驾驶汽车和智能交通系统的研究上都取得了不错的成果,有些研究结构已经研制成功了智能车的原型,并进行相关试验。最近10 年在传统汽车中半导体和电子技术应用的越来越多。汽车产业已经进入到了电子时代,智能汽车将是未来的发展趋势。根据相关部门的统计数据,2012 年之后生产的汽车,汽车上电子装置系统占整个汽车总成本超过30%,甚至在一些配置较高的汽车上,比重超过50%。 随着改革开放的不断深入,我国经济在过去的一段时间迅速崛起,人民的生活水平和幸福指数每年都在提高,拥有一辆汽车也不在是一个的梦想,而是变成了一个很多家庭都能消费的起的代步工具,当前我国的汽车数量,每年以两位数增长,然而我国的公共配套却相对落后,这就造成了我国严重的交通问题,道路拥挤十分严重,出现了开车不如骑车快的现象。 因此发展智能车和智能交通系统,是解决现有问题的一种有效的方法,通过不断的研究会在交通拥堵、减少事故方面起到十分显著的作用。未来通过无人驾驶技术,实现汽车的自动行驶,对于我国汽车、控制、电子等领域在新时期提高国际竞争力和自主创新能力有着重要的作用。 智能汽车控制系统的研究是一项复杂的系统工程,其中包含了机械、电子、自动循迹、自适应控制、机器人技术、传感器技术等多学科相互交融的一项研究。智能车通过多个传感器模块的协同工作,经过控制单元进行决策实现汽车的自动行驶、最优化路径等功能。 同时无人驾驶智能车在货运、农业生产、军事等领域具有很好的应用前景。 综上所述,发展智能汽车控制技术能够提高我国在微电子技术、人工智能、电机控制等新技术领域的技术水平。同时随着智能汽车的不断发展也能够有效的改善现有的交
智能小车系统项目设计方案
智能小车系统项目设 计方案 第一章引言 1.1 智能车研究背景 1.1.1发展历史 智能小车系统是迷你版的智能汽车,二者在信息提取,信息处理,控制策略及系统搭建上有很多相似之处,可以说智能小车系统将为智能汽车提供很好的试验和技术平台,从而推动智能汽车的发展。 智能汽车是未来汽车的发展方向,将在减少交通事故、发展自动化技术、提高舒适性等许多方面发挥很重要的作用;同时智能汽车是一个集通信技术,计算机技术,自动控制,信息融合技术,传感器技术等于一身的行业,它的发展势必促进其他行业的发展,在一定程度上代表一个国家在自动化智能方面的水平[1]。汽车在走过的100多年的历史中,从没停止过智能化的步伐,进入20世纪90年代以来,随着汽车市场竞争激烈程度的日益加剧和智能运输系统(ITS)的兴起,国际上对于智能汽车及其相关技术的研究成为热门,一大批有实力有远见的大公司、大学和研究机构开展了这方面的研究。很多美国、日本和欧洲等国家都十分重视并积极发展智能车系统,并进行了相关实验,取得了很多成就。我国的相关研究也已经开展,清华大学成立了国最早的研究智能汽车和智能交通的汽车研究所,在汽车导航、主动避撞、车载微机等方面进行了广泛而深入的研究,2000年智能交通系统进入实质性实施阶段,国防科大研制出第四代无人驾驶汽车,西北工业大学、交通大学、大学等也展开了相关研究。这一新兴学科正在吸引越来越多的研究机构和学者投入其中。
1.1.2 智能车的应用前景 智能车系统有着极为广泛的应用前景。结合传感器技术和自动驾驶技术可以实现汽车的自适应巡航并把车开得又快又稳、安全可靠;汽车夜间行驶时,如果装上红外摄像头,就能实现夜晚汽车的安全辅助驾驶;此外,智能车系统还可以工作在仓库、码头、工厂或危险、有毒、有害的工作环境里,并能担当起无人值守的巡逻监视、物料的运输、消防灭火等任务。在普通家庭轿车消费中,智能车的研发也是很有价值的,比如雾天能见度差,人工驾驶经常发生碰撞,如果用上这种设备,激光雷达会自动探测前方的障碍物,电脑会控制车辆自动停下来,撞车就不会发生了。 1.2智能汽车大赛介绍 公司开发嵌入式解决方案的历史可追溯到50多年前,现在,已发展成为在20多个国家设有业务机构,拥有 20,000多名员工的实力强大的独立企业。 公司专门为汽车、消费电子、工业品、网络和无线应用提供“大脑”。他们无比丰富的电源管理解决方案、微处理器、微控制器、传感器、射频半导体、模块与混合信号电路及软件技术已嵌入在全球使用的各种产品中。并拥有雄厚的知识产权,其中包括6,200 多项专利。 为加强大学生实践、创新能力和团队精神的培养,促进高等教育教学改革,受教育部高等教育司委托(教高司函[2005]201号文,附件1),由教育部高等自动化专业教学指导分委员会(以下简称自动化分教指委)主办全国大学生智能汽车竞赛。该竞赛以智能汽车为研究对象的创意性科技竞赛,是面向全国大学生的一种具有探索性工程实践活动,是教育部倡导的大学生科技竞赛之一。该竞赛以“立足培养,重在参与,鼓励探索,追求卓越”为指导思想,旨在促进高等学校素质教育,培养大学生的综合知识运用能力、基本工程实践能力和创新意识,激发大学生从事科学研究与探索的兴趣和潜能,倡导理论联系实际、求真务实的学风和团队协作的人文精神,为优秀人才的脱颖而出创造条件。 该竞赛由竞赛秘书处为各参赛队提供/购置规定围的标准硬软件技术平台,竞赛过程包括理论设计、实际制作、整车调试、现场比赛等环节,要求学生组成团队,协同工作,初步体会一个工程性的研究开发项目从设计到实现的全过程。该竞赛融科学性、趣味性和观赏性为一体,是以迅猛发展、前景广阔的汽