工业机器人期末复习资料大全
工业机器人课件资料
一、机器人运动学
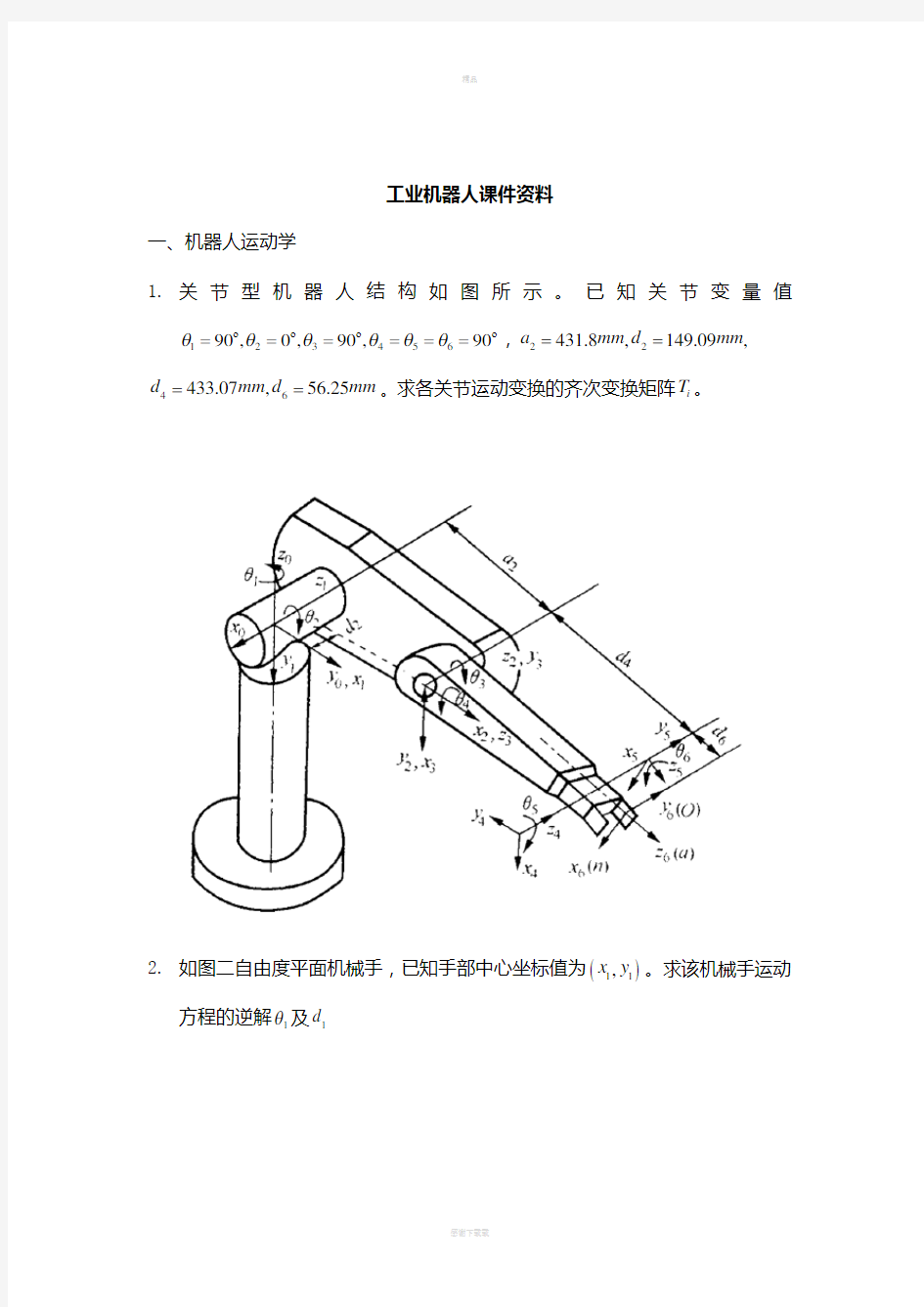
1. 关节型机器人结构如图所示。已知关节变量值
12345690,0,90,90θθθθθθ======o o o o ,22431.8,149.09,a mm d mm ==
46433.07,56.25d mm d mm ==。求各关节运动变换的齐次变换矩阵i T 。
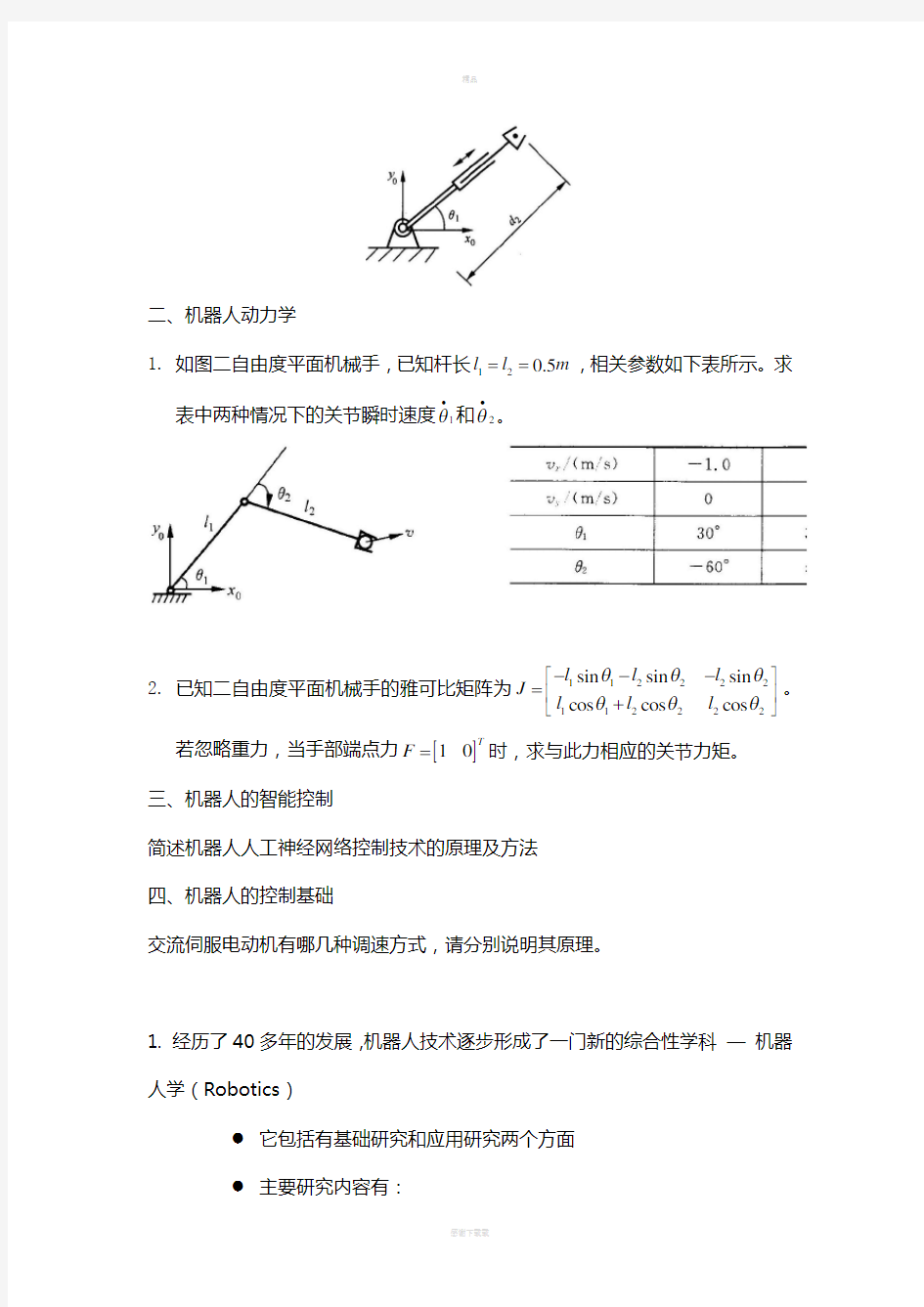
2. 如图二自由度平面机械手,已知手部中心坐标值为()11,x y 。求该机械手运动
方程的逆解1θ及1d
二、机器人动力学
1. 如图二自由度平面机械手,已知杆长120.5l l m ==,相关参数如下表所示。求
表中两种情况下的关节瞬时速度1θ?和2θ?
。
2. 已知二自由度平面机械手的雅可比矩阵为1122221122
22sin sin sin cos cos cos l l l J l l l θθθθθθ---??=??+??。若忽略重力,当手部端点力[]10T F =时,求与此力相应的关节力矩。
三、机器人的智能控制
简述机器人人工神经网络控制技术的原理及方法
四、机器人的控制基础
交流伺服电动机有哪几种调速方式,请分别说明其原理。
1. 经历了40多年的发展,机器人技术逐步形成了一门新的综合性学科 — 机器人学(Robotics )
● 它包括有基础研究和应用研究两个方面
● 主要研究内容有:
(1) 机械手设计;(2) 机器人运动学、动力学和控制;(3) 轨迹设计和路径规划;
(4) 传感器(包括内部传感器和外部传感器);(5) 机器人视觉;(6) 机器人语言;(7) 装置与系统结构;(8) 机器人智能等。
2. 机器人的定义
国际和国外相关组织的定义
国际标准化组织(ISO)的定义:机器人是一种自动的、位置可控的、具有编程能力的多功能机械手,这种机械手具有几个轴,能够借助可编程序操作来处理各种材料、零件、工具和专用装置,以执行种种任务。
美国国家标准局(NBS)的定义:机器人是一种能够进行编程并在自动控制下执行某些操作和移动作业任务的机械装置。
美国机器人协会(RIA)的定义:机器人是一种用于移动各种材料、零件、工具或专用装置的,通过可编程序动作来执行种种任务的,并具有编程能力的多功能机械手。
日本工业机器人协会(JIRA)的定义:工业机器人是一种装备有记忆装置和末端执行器的,能够转动并通过自动完成各种移动来代替人类劳动的通用机器。
有关学者的定义
在1967年日本召开的第一届机器人学术会议上提出了两个有代表性的定义。
森政弘与合田周平提出的定义:“机器人是一种具有移动性、个体性、智能性、通用性、半机械半人性、自动性、奴隶性等7个特征的柔性机器”。从这一定义出发,森政弘又提出了用自动性、智能性、个体性、半机械半人性、作业
性、通用性、信息性、柔性、有限性、移动性等10个特性来表示机器人的形象。
日本早稻田大学加藤一朗(日本机器人之父)教授认为:机器人是由能工作的手,能行动的脚和有意识的头脑组成的个体,同时具有非接触传感器(相当于耳、目)、接触传感器(相当于皮肤)、固有感及平衡感等感觉器官的能力。
也有一些组织和学者针对不同形式的机器人分别给出具体的解释和定义,而机器人则只作为一种总称。例如,日本工业机器人协会(JIRA)列举了6种型式的机器人:
(1) 手动操纵器:人操纵的机械手,缺乏独立性;
(2) 固定程序机器人:缺乏通用性;
(3) 可编程机器人:非伺服控制;
(4) 示教再现机器人:通用工业机器人;
(5) 数控机器人:由计算机控制的机器人;
(6) 智能机器人:具有智能行为的自律型机器人。
3.机器人的结构
简单地说,机器人主要由执行机构、驱动和传动装置、传感器和控制器四大部分构成。
●执行机构:机器人的足、腿、手、臂、腰及关节等,它是机器人运动和完
成某项任务所必不可少的组成部分。
●驱动和传动装置:用来有效地驱动执行机构的装置,通常采用液压、电动
和汽动,有直接驱动和间接驱动二种方式。
●传感器:是机器人获取环境信息的工具,如视觉、听觉、嗅觉、触觉、力
觉、滑觉和接近觉传感器等,它们的功能相当于人的眼、耳、鼻、皮肤及筋骨。
●控制器:是机器人的核心,它负责对机器人的运动和各种动作控制及对环
境的识别。
现代工业机器人的控制器都是由计算机控制系统组成,控制方式主要有示教再现、可编程控制、遥控和自主控制等多种方式。
4.工业机器人几种常用的控制方式
“示教再现”方式:它通过“示教盒”或人“手把手”两种方式教机械手如何动作,控制器将示教过程记忆下来,然后机器人就按照记忆周而复始地重复示教动作,如喷涂机器人。
“可编程控制”方式:工作人员事先根据机器人的工作任务和运动轨迹编制控制程序,然后将控制程序输入给机器人的控制器,起动控制程序,机器人就按照程序所规定的动作一步一步地去完成,如果任务变更,只要修改或重新编写控制程序,非常灵活方便。大多数工业机器人都是按照前两种方式工作的。
“遥控”方式:由人用有线或无线遥控器控制机器人在人难以到达或危险的场所完成某项任务。如防暴排险机器人、军用机器人、在有核辐射和化学污染环境工作的机器人等。
“自主控制”方式:是机器人控制中最高级、最复杂的控制方式,它要求机器人在复杂的非结构化环境中具有识别环境和自主决策能力,也就是要具有人的某些智能行为。
高中《机器人制作》课程方案
《机器人制作》课程方案 《机器人制作》校本课程于开设至今,已积累了丰富的实践教学经验,并已自行编制了较为完整的校本教材。在师资培训上,已完成了对其他信息科技教师的培训和带教,现已成为学校的一门特色拓展课程。 一、基本数据 课程名称:机器人制作课程类型:综合实践课 教师:授课对象:高中二年级学生 时间:10课时、隔周2课时 所在学校:市一中教学设备:乐高机器人组件 二、课程的性质和指导思想 1、课程的性质 课程的性质是高二必选拓展课。以乐高机器人设备为载体,简单阐述机器人与人工智能的最基础原理及其实现的方法和策略,开展机器人制作的搭建、机器人编程控制等最基础教学活动,每节课都以项目活动形式开展教学,学生以2人一组互相合作的方式,动手搭建、制作机器人和完成简单的机器人控制程序,在实践应用中了解机器人工作和自动化控制的一般原理。淡化抽象的理论,强调学生的实践体验,强调学生实物建模和理论构思的有机结合,引导发现、探究和总结。 2、课程指导思想 智能机器人技术是现代科技,特别是信息技术发展的综合体现,是中小学学科课程和综合实践课程的良好载体。机器人制作课程的主要任务是培养学生对智能机器人的兴趣,使学生了解和掌握以机器人技术为载体的机电一体化技术和信息技术的基础知识和基本技能,体会科技的发展对人类生活的影响,通过机器人制作课程的项目实践活动,培养学生良好的信息素养、创新精神、实践能力和良好的合作意识。 三、课程目标 1、通过本课程的学习,了解机器人制作常识及其机电一体化的简单原理。 2、通过机器人制作全过程的体验活动,树立创新意识、实践意识和合作意识,激发对机器人技术的探究兴趣。
工业机器人机械培训资料
6400R工业机器人机械培训资料 第一章机器人的总体介绍 ABB IRB6400r机器人是由瑞典生产的一种6轴联动的工业机器人,采用的操作系统是Bse Ware Os。可以执行先编好的使用程序用于控制机器人的各种动作。同时可以和外部设备进行数据交换,可以实现对外部设备 的控制。机器人表面经过特殊处理,轴承和减速箱都经过良好的密封,可以保证机器人在恶劣的环境中正常的 工作。该机器人广泛使用于弧焊、点焊、搬运以及涂胶等领域。随机器人一起有三本资料分别是 《用户手册》:介绍机器人的使用及操作。 《编程手册》:程序语句的说明 《产品手册》:介绍机器人安装、维护保养以及故障排除。 1.1机器人的组成: 机器人由本体和控制电柜组成 Axis Motor axis 4 Motor mis 锣-arm -Motor ABB Robotics Products AB S-721 68 as:eT5 Sweden k*ade m Sweden Type:I尺日?4C0R M&9 Robot ver&Ofl:IRS 54CJ0W2Q50 Man. order |||||||||||||xxxxxx H OHL load See instructons No: IIIIIIIIIIIIIIIIIIHIIII&4-XXXXX □ ate of r virufactL『ng:19&9-XX*XX Net weight 2,5.120 z 3060 kg23S-150 : 2240 kg 2.5-150: 2060 kg2^-200 2390 kg 2^200 : 3230 kg 3 0-100 2250 kg ABB Robotics Products AB S-721 開/asteras Sweden Made- in Sweder T/D& 1 尺弓 尺如version IR3 640DR/2.5- 'SO 帰tage: 3 x 4K V Frequency: 50-6C Hz Power:7.2 k'7A Man.沁r: |||||||||||||XXXXXX Re No:RXXXXXXXXXX Serial. No ||||||||||||||||||||||64-XXXXX Date cf manufacturing1&9&-XX-XX weight:240 kg
机器人校本课程教材(排版完成)
欢迎阅读 前言 通过机器人课程的学习主要培养学生的兴趣爱好、提升空间、逻辑思维能力,并从中获得自我提升的价值取向。 2.过程和方法:
通过课程的教学,让学生从初步识别一些积木零件名称,到拼装动手组装机器,再到学习编程,再远程遥控机器人操作。 3.知识和技能: 通过课堂教学,让学生学会机器人的基础理论知识并能 多动脑、促进学生的心智健康发展。 5.学习机器人为学校和特色教育添砖加瓦。 目录 第一课认识机器人 第二课机器人的种类及其发展
第三课舞蹈教学常用术语与基本功练习 第四章EV3软件系统 第五章机器人传动结构 第六章机器人受控移动 第七课使用传感器转向 们可称之为动作器官。 2.获取外界信息:动物可以用耳朵听见声音,蜗牛的触须碰到硬物就会收缩,我们可称之为感应器官。
3.规划作业:从家里到学校通常都有几条路可以到达,同学们却通过大脑及其思维能力找到最近的一条路,我们可称之为思维器官及其思想。 二、机器人构成的基本条件 人类是地球上最高级、最聪明的动物,基本条件是因为 智能机器甲虫的触须是一种感应器官 在制作机器人的时候,我们不仅可以使用课堂上提供的拼装套件,还可以选取身边随手可得的各种材料作为机器人的加工原料。例如:木板、金属板、塑料 螺帽那样的各种各样的五金紧固件。 只要我们在日常生活中留心观察身边的各种机械设备的动作,例如缝纫机、变速自行车、起重机、挖土机等等,相信一定能受到良好的启发,从而设计出能满足我们自己功能需求的机械结构。
条件二——感应和动作电子部件 一个真正拥有智能的机器人通 常都需要具备一定的感知能力,具有 感知能力的电子器件我们通常又称 之为传感器,顾名思义,这类器件具 RCU(robotcontrolunit),RCU 就好象一台微型的家用电脑, 它可以执行程序指令,并向具 体动作器官发出相应的动作信 息。
智能机器人的现状和发展趋势
智能移动机器人的现状和发展 姓名 学号 班级:
智能移动机器人的现状及其发展 摘要:本文扼要地介绍了智能移动机器人技术的发展现状,以及世界各国智能移动机器人的发展水平,然后介绍了智能移动机器人的分类,从几个典型的方面介绍了智能移动机器人在各行各业的广泛应用,讨论了智能移动机器人的发展趋势以及对未来技术的展望,最后提出了自己的建议和设想,分析我国在智能移动机器人方面发展并提出期望。 关键词:智能移动机器人;发展现状;应用;趋势 1引言 机器人是一种可编程和多功能的,用来搬运材料、零件、工具的操作机,或是为了执行不同的任务而具有可改变和可编程动作的专门系统。智能移动机器人则是一个在感知 - 思维 - 效应方面全面模拟人的机器系统,外形不一定像人。它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术,研究它们相互之间的关系。还可以在有害环境中代替人从事危险工作、上天下海、战场作业等方面大显身手。一部智能移动机器人应该具备三方面的能力:感知环境的能力、执行某种任务而对环境施加影响的能力和把感知与行动联系起来的能 力。智能移动机器人与工业机器人的根本区别在于,智能移动机器人具有感知功 能与识别、判断及规划功能[1] 。 随着智能移动机器人的应用领域的扩大,人们期望智能移动机器人在更多领 域为人类服务,代替人类完成更复杂的工作。然而,智能移动机器人所处的环境 往往是未知的、很难预测。智能移动机器人所要完成的工作任务也越来越复杂; 对智能移动机器人行为进行人工分析、设计也变得越来越困难。目前,国内外对 智能移动机器人的研究不断深入。 本文对智能移动机器人的现状和发展趋势进行了综述,分析了国内外的智能 移动机器人的发展,讨论了智能移动机器人在发展中存在的问题,最后提出了对 智能移动机器人发展的一些设想。 1
机器人校本课程教材
永昌县第一小学 在小学教育中,创新教育已经被提到了前所未有的高度。在小学各门学科教学之外,一种新的教学手段正为创新教育注入了新的活力,这就是机器人教育。机器人教育,为学生聪明才智的发挥提供了一个展示的好机会。通过机器人的学习活动,让学生了解掌握传感器知识,结构的搭建方法,各种部件的控制方法;引导学生逐渐形成编程的思想,掌握机
器人的程序设计方法;在计算机上编写程序,然后通过计算机和机器人的通讯技术,将程序下载到机器人的微处理器上,通过观察机器人的运行情况来调试、验证、反思、改进这里面涵盖了计算机知识、数学知识、物理知识、结构学知识等,这种多学科的综合性、合作性学习,极大地激发了学生的学习兴趣,有效地培养了学生的创新能力和综合素质能力。因此,在中小学开展机器人教育有着重要的意义。 课程理念 一、课程基本理论 (一)机器人特色课程教学总目标(教学的三维目标) 1. 情感态度价值观: 通过机器人课程的学习主要培养学生的兴趣爱好、提升空间、逻辑思维能力,并从中获得自我提升的价值取向 2. 过程和方法: 通过课程的教学,让学生从初步识别一些积木零件名称,到
拼装动手组装机器,再到学习编程,再远程遥控机器人操 作。 3. 知识和技能:通过课堂教学,让学生学会机器人的基础理论知识并能够把基础知识运用到课堂实践中来。 (二)机器人特色课程教学重难点重点:组装机器零件、编辑程序。 难点:在学习中如何获得自我成就感,提升空间、逻辑思维能力,并从中获得自我提升的价值取向。 (三)机器人特色课程培养方向(从学生角度) 1. 通过机器人实践活动,激发学习兴趣,为今后的机器人学习奠定基础。 2. 在课堂中,加强学生合作交流,发挥团队精神,既要表现好个体的水平,也要有体现群体的意识,增强团队合作的精神。 3. 在机器人拼装的训练过程中,要有耐心,持之以恒,进而促进人格完善。 4. 了解机器人的基本理论和拼装技术,让学生多动手、多动脑、促进学生的心智健康发展。 5. 学习机器人为学校和特色教育添砖加瓦。
虚拟机器人校本课程活动教案
《虚拟机器人》校本课程活动教案
课时:1课时 展示范例机器人激发学生搭建兴趣。 师:同学们,上节课我们初步了解了虚拟机器人的平台,这节课,我们来试试搭建属于我们自己的第一个机器人。 一、进入操作界面 首先请大家陆平台,然后点击“搭建机器人”选项,进入机器人搭建操作界面。老师先来带着大家了解一下这一界面的基本功能划分。 模型面板:包含机器人所有模型,有控制器、驱动、安装块、传感器和其它5 大类。 模型列表:列出各个模型分类中所有模型。 模板列表:用户创建的模板,模板可保存经常使用的模型组合。 菜单工具栏:有文件、功能和操作3 个菜单,菜单下有相应的工具栏命令。
属性面板:在属性面板中设置直流电机、伺服电机、传感器的属性。 机器人信息:查看机器人零部件的数量,机器人的重量、尺寸等信息。 机器人编辑区:用于构建机器人的操作区,完成机器人零部件的安装等操作。 视角控制面板:调整查看编辑区的视角,完成视角旋转、缩放、移动等操作 二、探索尝试 通过老师的介绍后,大家应该对这些功能区有所了解了。现在请同学们动动脑,动动手,从模型面板中选择自己喜欢的模型,放到机器人编辑区,注意视角的控制和安装点的点选,看谁能组装出属于自己的第一台机器人! 三、问题解决 (一)、机器人搭建首先需要选择好控制器,这是机器人的主体,没有控制器,其他的零件是无法起作用的。 (二)、控制器安放是有方向的,编辑区蓝色坐标轴的方向为机器人前方,学生容易出现错误。 (三)、在旋转3D视角时,切忌用鼠标左键进行拖动,这会改变机器人零件的实际位置。而应该使用视角控制按钮或者鼠标的右键和滚轮来进行视角切换。 (四)、轮子是和电机安装在一起,电机再和控制器连接起来,而不是直接把轮子安装到控制器上。 教师在巡视指导过程中,发现问题,适时引导讲解。 四、拓展延伸 其实在机器人搭建的过程中,我们还可以使用一些小技巧来提高搭建的效率。教授“模板”的使用方法,把一些多次使用的零件组合创建为模板,可以直接拖出来重复使用。 五、秀一秀 通过电子教室“学生演示”的功能,请同学们来展示一下自己的个性机器人,大家来评评谁最有想象力和创造力。 学生点评,教师总结。
Arduino创意机器人-课程纲要
“Arduino创意机器人”课程纲要 “多平台、跨学科、聚类化、重创造的中小学机器人教育研究”课题组 机器人是一门涉及运动学和动力学、系统结构、传感技术、控制技术等多领域的交叉学科,其教育实施正是促使学生整合科学、技术、数学领域的知识,以工程标准化的思想进行综合实践的过程,具有较强的教育价值。近年来,随着基础教育新课程改革的不断深入实施,我国中小学机器人教育也有了较快发展,并成为中小学综合实践课程和技术课程的载体,其教育价值已获得社会认可。Arduino是一块基于开放源代码的USB接口Simple I/O接口板,并且具有IDE集成开发环境。通过Arduino平台可以让学生了解和掌握机器人的基本知识和技能,包括机器人机械部分、传感部分和控制部分的设计与搭建以及在这个过程中需要运用的各种知识,可以培养学生良好的信息素养、创新精神和实践能力。 一、课程性质和理念 (一)课程性质 Arduino创意机器人遵循STEM科学、技术、工程、数学四位一体的理念,学生在运用Arduino平台进行机器人创造开发的时候,把学习到的零碎知识与机械工程转变成一个探究世界相互联系的不同侧面过程,使得学生在杂乱无章的学习情境中获得设计能力、合作能力、问题解决能力和实践创新能力的提升。 1.科学性 Arduino创意机器人是一门交叉了多门学科的综合性课程,涉及到许多基础学科,包括数学、物理、计算机、化学、生物、多媒体等,它是以多种学科的基础理论作为前提的。 2.实践性 Arduino创意机器人具有很强的实践性,学生在学习该课程的时候必须参与到机器人设计制作的过程中来,这一实践过程也使得学生的学习变得生动有趣。 3.综合性 在Arduino创意机器人的学习过程中仅仅拥有物理、生物、化学等基础知识是远远不够的,它要求学生人为地对多门学科知识进行综合创造,在创造发明的基础上,综合运用多学科知识,做成满意的作品。 4.创造性 Arduino创意机器人后期学习的关键在于学生思维的创造性开发。Arduino创意机器人基于学科理论,立足于实际生活,通过技术思想以及Arduino平台的运用解决现实生活中的实际问题,为学生细心生活、发挥创造性提供了宽广的舞台。 (二)课程理念 1.以STEM为理念,培养学生全面发展 STEM教育作为后设学科,以与其他学科融合成一个新整体为基础。在Arduino机器人教育中融入STEM理念的教学不仅可以培养学生的STEM素养,还可以帮助学生在杂乱无章的学习情境中获得设计能力、合作能力、问题解决能力和实践创新能力的提升。 2.注重学生创造能力的培养,加强学生实践能力 Arduino创意机器人的学习不是教条式的课本知识的灌输,需要学生参与到课堂中来,通过发现生活中的问题,提出解决问题的创造性想法,再运用Arduino平台进行机器人制作以解决实际问题。这一系列的活动都需要学生参与其中并主动实践。 3.通过教学项目的聚类设计,提高学生学习效率 聚类设计是依据某种线索组合一系列项目,形成具有内在联系、具有螺旋上升和发散结
智能机器人论文
智能机器人的发展与应用前景 摘要 本文介绍了智能机器人的发展概况、机器人的感官系统、机器人运动系统及人工智能技术在机器人中的应用,智能机器人是一个在感知-思维-效应方面全面模拟人的机器系统,外形不一定像人。它是人工智能技术的综合试验场,可以全面地考察人工智能各个领域的技术,研究它们相互之间的关系。还可以在有害环境中代替人从事危险工作、上天下海、战场作业等方面大显身手。 关键词: 智能机器人感官仿生人工智能 1.引言 人们通常把机器人划分为三代。第一代是可编程机器人。这种机器人一般可以根据操作人员所编的程序,完成一些简单的重复性操作。这一代机器人是从60年代后半叶开始投入实际使用的,目前在工业界已得到广泛应用。第二代是“感知机器人”,又叫做自适应机器人,它在第一代机器人的基础上发展起来的,能够具有不同程度的“感知”周围环境的能力。这类利用感知信息以改善机器人性能的研究开始于70年代初期,到1982年,美国通用汽车公司为其装配线上的机器人装配了视觉系统,宣告了感知机器人的诞生,在80年代得到了广泛应用。第三代机器人将具有识别、推理、规划和学习等智能机制,它可以把感知和行动智能化结合起来,因此能在非特定的环境下作业,称之为智能机器人。智能机器人与工业机器人的根本区别在于,智能机器人具有感知功能与识别、判断及规划功能。而感知本身,就是人类和动物所具有的低级智能。因此机器的智能分为两个层次:①具有感觉、识别、理解和判断功能; ②具有总结经验和学习的功能。所以,人们通常所说的第二代机器人可以看作是第一代智能机器人。 2.智能机器人的感官系统 2.1触觉传感器 英国近几年在阵列触觉传感方面开展了相当广泛的研究。例如:Sussex大学和Shack-leton系统驱动公司研制的基于运动的介电电容传感的阵列;由威尔士大学和软件科学公司研制的采用压强技术的装在机器人夹持器上的传感器。 2.2视觉传感 在机器人视觉方面,目前市场上销售的有以下6类传感器:①隔开物体的二维视觉:双态成像;②隔开物体的二维视觉:灰度标成像;③触觉或叠加物体的二维视觉;④二维观察;⑤二维线跟踪;⑥使用透视、立体、结构图示或范围找寻技术从隔开物体中提取三维信息。在这类系统方面,它们只能做一些很简单的操作。例如:为了使机器人具有某种程度的人眼功能,已进行大量的研究工作并向如下两类系统发展:①从一维物体中提取三维信息;②活动机器人导航、探路和躲避障碍物的现场三维分析。伦敦大学目前正在研究一种双目视觉机器人的实时图像处理机。还有正在研究机器人视觉系统的教育机构有:考文垂工业大学、爱丁堡大学、格拉斯哥大学、格温特大学;而伯明翰大学则专门研究惯性传感器。另外,还有许多从事传感系统开发的单位,都进行了传感反馈研究。如米德尔塞克斯工业大学致力于使机器人能组织和使用来自不同类型传感器的数据。这种机器人能“看”、“感”和“听”,它更接近于人。 2.3听觉传感
《机器人实践与体验》校本课程纲要
校本课程纲要 课程名称:机器人实践与体验 课程类型:学科拓展 开课教师: 一、课程背景 机器人教学是以创新教育理论为指导,以培养学生的创新思维、科学品质、探索精神、实践能力为目标的学科。 机器人的形状各式各样。实际意义上的机器人,应该是“能自动工作的机器”。有的功能很简单,有的就复杂得多。机器人通常具有三个基本特征:身体:物理状态。大脑:控制机器人的程序。动作:任何机器人都有一定的动作表现。 机器人制作可以让同学们在“玩”中不自觉的全身心地投入到信息技术的应用中,激发创造性思维的发挥,也使自身信息素养得到了提升。同学们还可以体会到利用信息技术能把事情做的更好;通过信息技术能知道更多自己想知道的信息;信息技术能使自己的学习达到更高的层次,机器人都有一个不变的目标——工作! 二、课程目标 1、了解机器人技术,知道机器人综合了机械工程,电子工程,传感器应用,信息技术,数学,物理等多种学科知识。 2、通过循序渐进和积极创意的学习,通过机械搭建、电脑程序编写和工艺设计,促进知识的积累形成。 3、认识合作学习、相互协作的重要性,以完善综合素质,尤其是心理素质的提高。 4、掌握信息技术知识;增强使用信息技术积极的态度; 懂得使用信息技术能
使自己的学习达到更高的层次。 5、通过成功的体验,发现自己丰富的潜在能力,总结成功的途径,增强自信心。以健康的心态面对未来的挫折、失误……和成功。 三、课程简介(课程内容与活动安排) 机器人的形状各式各样。实际意义上的机器人,应该是“能自动工作的机器”。有的功能很简单,有的就复杂得多。机器人通常具有三个基本特征:身体:物理状态。大脑:控制机器人的程序。动作:任何机器人都有一定的动作表现。 机器人制作可以让同学们在“玩”中不自觉的全身心地投入到信息技术的应用中,激发创造性思维的发挥,也使自身信息素养得到了提升。同学们还可以体会到利用信息技术能把事情做的更好;通过信息技术能知道更多自己想知道的信息;信息技术能使自己的学习达到更高的层次,机器人都有一个不变的目标——工作! 四、课程对象与课时安排 1、学期:本课程拟在小二、三年级开设,计划一学年完成课程学习。 2、课时:本课程拟需要每学期30个课时。 3、教室场地:机器人实验室,配备10台电脑。 五、课程实施 1、教师讲授 2、小组活动 3、动手搭建 4、编写程序 5、作品运行展示 内容规划:
工业机器人应用培训大纲
工业机器人应用培训计划 (试行) 2015/03/19
一、工业机器人应用人才市场前景 由于人力成本的快速上升,全球产业结构深度调整,越来越多的企业装配自动化设备来提高产能、降低人力成本。以全球代工帝国富士康集团为代表的机器人计划是:三年后将目前的1万台机器人增至100万台。由此看出,中国作为“世界工场”正在快速进行技术升级,顺应制造技术的向前发展,自动化生产时代的到来已是一种趋势。可以预计,未来的几年中,企业对于自动化高层次人才的需求越来越大,而目前我国能够掌握机器人操作、调试、维修的技能人才极度缺乏,国内大中专院校机器人专业开设几乎为空白,所以,开设机器人相关专业,建设机器人实训基地是亟需解决的问题。 二、工业机器人专业人才培养体系 2.1工业机器人人才岗位分析 岗位技能要求人才适用企业 工业机器人操作工业机器人操作与编程机器人应用企业 工业机器人现场管理工业机器人维护、工艺及现场 管理 机器人应用企业 工业机器人维修应用机械、电气、控制的安装、检 测与维修 机器人应用、机器人制造企业 工业机器人装配调试机器人安装、电气调试、装配 (本体装配) 机器人应用、机器人制造企业 工业机器人应用开发自动化生产线设计与应用、工 作站装调、工作站设计与改造 机器人应用企业、集成厂商 工业机器人销售服务产品集成解决方案,售前技术 销售方案、售后产品调试安装 交付等 机器人制造企业、机器集成厂商 人才岗位需求则主要集中在工业机器人设备维修、装配与调试、工业机器人的应用开发与系统集成设等岗位,主要分为技术与销售两条人才培养路线。 2.2 工业机器人人才培养目标
培养在机电设备制造企业、自动化、数控技术、机电一体化设备运用企业从事工业机器人设备的维修与装调、自动化生产线的管理与维护、工业机器人工作站及自动化生产线的集成设计与应用、销售、推广与售后技术支持工作的高级技术应用型人才。 在机器人制造企业掌握工业机器人应用专业的基础理论和操作技能,具备机械结构设计、电气控制、传感技术、智能控制等专业技能,能独立从事大型机电设备、工业机器人应用系统的安装、调试、编程、工艺设计、维修、运行与管理等方面的工作任务;具有较好的实践经验,能进行应用设计开发具有创新精神和创业意识的高技能应用型人才。 人才培养层次: 人才层次 技能要求 初级人才 工业机器人操作、编程、日常维护,编程定位示教编程; 中级人才 工业机器人离线编程, 机械与电气控制的装配、调试 工业机器人的检测与维修 高级人才 工业机器人应用设计开发与集成 工业机器人典型岗位的对应职业技能要求 序典型 工作岗位 工作任务职业能力要求 工业机器人操作应用岗位 1.能够熟练操作机器人进行各种作业。 2.能够熟练处理工业机器人在使用过程 动作要求。 3、按照动作要求,编制相应的控制程序。 4、对机器人的动作误差能够调试调整。 1. 具有阅读电气原理图及接线图的能力; 2. 能按规范操作机器人。 3. 能看懂工业机器人的说明书。 2 工业 机器人维修 保养岗位 1.能够对工业机器人进行定期维护与保 养。 2.能够制定出工业机器人对应的点检单 和保养程序。 3.能够确选择、合理使用设备安装工具, 并对其进行保养。 4.能够快速熟练处理工业机器人在使用 过程中出现的各种故障现象。 1. 能正确选择、合理使用设备安装工具,并对其进行 保养。 2.能正确选择并合理使用常用和专业调试工具。 3.能使用专用仪器、设备完成设备的参数调整并进行 检查。 4.能完成电气控制系统和电气控制设备的连接,有 PLC控制程序编制与调试能力。 5.能按规程进行设备调试,并具备技术文件的记录与 整理能力。 6. 能编制设备检修计划。
智能机器人材料3
2013 10th International Conference on Ubiquitous Robots and Ambient Intelligence (URAI) October 31-November 2, 2013 / Ramada Plaza Jeju Hotel, Jeju, Korea
Emotional Gait Generation Method based on Emotion Mental Model - Preliminary experiment with Happiness and Sadness Matthieu Destephe1, Kenji Hashimoto2 and Atsuo Takanishi3
Graduate School of Science and Engineering, Waseda University, Tokyo, Japan 2 Faculty of Science and Engineering, Waseda University, Tokyo, Japan 3 Department of Modern Mechanical Engineering & Humanoid Robotics Institute, Waseda University, Tokyo, Japan (Tel : +81-3-3203-4394; E-mail: contact@takanishi.mech.waseda.ac.jp)
1
Abstract – Designing humanoid robots able to interact socially with humans is a challenging task. If we want the robots to be actively integrated in our society, several issues have to be taken in account: the look of the robot, the naturalness of its movements, the stability of its walk, the reactivity it might have with its human partners. We propose to improve the reactivity of the robot by using a emotional mental model in order to generate emotional gait patterns. Those patterns will help the understanding of any emotional message conveyed between a human and a robot. We propose a novel emotional gait generation method based on the Emotion mental model. We did preliminary experiments with the Happiness and Sadness emotions and with different intensities. Keywords - Motion Generation, Emotion, Biped Robot, Social Robotics
1. Introduction
Humanoid robots are designed to interact with people in their daily life and at any age, as soon as kindergarten or as late as nursing home. Advanced robots such as robot companions, robot workers, etc., will need to be able to adapt their behavior according to human feedback. For humans it is important to be able to give and to be given such feedback in a natural way, e.g., using emotional expression. Expressive robots can act as caregivers for children, with or without disabilities, and help their emotional development and wellbeing through emotive interaction. Therefore the ability of expressing emotions is important to facilitate intuitive human robot interaction. Moreover, the adaptation of the robot movements to the interaction context is necessary in order to create an interaction as natural and beneficial as possible. In this context, several emotion capable robots were developed along the years. For example, the robot Kismet was designed to simulate emotion and assess the affective intent of the caregiver [1]; NAO a small humanoid (58 cm) is often used in Human Robot Interaction (HRI) studies with children [2]; and the Waseda KOBIAN (fig. 1), designed by the applicant's team, combines a face capable of human-like expressions (24 DoF) and the bipedal locomotion ability. Preliminary studies on KOBIAN showed that whole-body posture clearly improves the emotion recognition [3].
However, if we want to perform a smooth and natural Human Robot Interaction, it necessitates a dynamic interaction between the participants with feedback, which could be visual, audible or tactile. Most of the current robots are only focused on the facial expressions and use rarely their limbs [4-5]. It was showed that the use of whole-body to express emotions improves the recognition rate of the emotions, and thus could increase the understanding and feedback during an interaction. In the case where movements are used for the interaction, they are usually fixed and follow a pre-determined pattern. This means that the robot will follow the same stimuli-response pattern. However, emotions are known to be dependent on several factors such as interaction context, culture, age, and gender. Without dynamic adaptation, after some time, the human partner will become progressively bored and the human implication in the interaction will drop. Additionally, the emotive walking research is an innovative field of research which stays mainly unexplored. In this paper, we propose an emotional gait generation method based on the Emotion mental model [6]. After a brief literature review in section 2, we describe our robot platform, the emotional mental model and a new emotional gait generation method in section 3. We present an experiment in the section 4 and we conclude and comment our work in the section 5.
2. Related works
2.1 Humanoid robots Among human sized humanoids robots, just a few are capable of expressing emotions. HRP-4C is a geminoid which can express pre-programmed facial emotions but cannot walk [7]. ASIMO [8] and WABIAN-2RII [9] are able to walk but do not have emotion expression capabilities. KIBO [10], developed by KIST, can express facial emotion expression but this capability was not assess by research. KOBIAN-2R [11], developed at Waseda University, is able to walk and express emotions not only with its face but also with its whole body [13]. 2.2 Emotion models Emotion models can be classified in three categories: appraisal, a categorical or a dimensional approach. The appraisal approach states that our appreciation of events (appraisal) determines the reaction to those events and it is
978-1-4799-1197-4/13/$31.00 ?2013 IEEE
86
机器人校本课程纲要
《机器人》校本课程纲要 xx中学 《机器人》校本课程纲要 一、课程简介: 1.开发背景: 学校为学生开设了机器人这门课,就是培养学生解决问题和动手的能力。未来社会更需要有实践经验,有新的想法,创造力和新的思考方式。在解决问题的过程中,创新思维是培养解决问题能力的核心,它帮助学生发现多个可能的解决方案,寻找替代方案,挑战假设,并提出新的想法,帮助学生解决问题,使学生们会自觉地学习、获取新知识,从而培养学生了合作能力,提高沟通能力,充分表达思想能力。核心理念是“做中学,玩中学”。它传达的观念是让孩子充分体会学习的乐趣,让孩子成为整个学习的过程中是主导角色。 我校机器人教学主要采用乐高机器人EV3的可程序化积木为主,乐高机器人套件最吸引人之处,就像传统的乐高积木一样,玩家可以自由发挥创意,拼凑各种模型,而且可以让它真的动起来。 2.开发教师—— xxx 3.课程名称——可编程机器人 4.授课对象——高一年级学生 5.课程类别——可编程机器人拼装技能与编程能力提升 6.课时安排——每周一节 二、课程目标 1.知识与技能: (1)熟练掌握各个部件之间的组合方法
(2)根据自己的想象,拼装出有创意的机器人或积木 (3)对可编程机器人进行简单的编程操作 2.过程与方法: (1)学会设计、拼装机器人、对机器人进行编程 (2)通过小组合作制作增强学生之间的团队合作意识和创意分享意识 3.情感态度与价值观: 可编程机器人除了能给学生带来这些相互促进的能力之外,还可以带来无穷的乐趣。为兴趣而生、在能力中提升兴趣,这些能力都不是刻意去要求的,都是潜移默化的,无形中就学会这样的能力,同时能认识各种机械的运动方式、学习作品中的数学和物理原理、了解机械装置在生活中的应用,在后期通过机械结构,传感应用,程序应用进行研究探索性学习,进入机器人编程阶段,可以培养学生的逻辑思维能力、团队合作能力。 三、课程内容 1.机器人发展历史及简单结构拼装 2.讲解教师本人利用废旧的材料搭建一个机器人模型 3.熟悉各个零件的名称和作用 4.认识乐高机器人积木及基本零件识别 5.组装简易机器人 5. 传动装置的功能和作用 6. 建筑的建构 7. 搭建一个简单的小车 8. 乐高机器人编程环境介绍 9. 了解各个传感器 10. 超声波传感器的应用 11. 触动传感器的应用 12. 为小车进行编程 13.小组合作进行创意触碰小车搭建 14.为搭建的触碰小车进行编程
工业机器人培训总结
工业机器人培训总结Revised on November 25, 2020
工业机器人培训总结 在信息科学技术飞速发展的今天,随着人力成本逐渐的上升,工业机器人逐渐取代人力成为流水线上行的“操作员”已成为必然趋势。 为此今年7月底至8月初广东三向培训学院面向全国广大技工院校教师组织了“工业机器人应用与维护”项目培训班。同时本人有幸被学院指派参加了此次培训。这次培训对于我个人而言,我认为这次培训班举办的非常有意义,非常有必要,因为它不仅让我充实了更多的理论知识,更让我开阔了视野,解放了思想。 本次培训班主要培训学习的内容是“工业机器人应用与维护”,分别学习了解瑞典的ABB和日本三菱的六轴机器人的软件使用,及一些典型的机器人轨迹运动、搬运、码垛及工件装配等基本编程操作技能。 工业是面向工业领域的多关节机械手或多自由度的机器装置,它能自动执行工作,是靠自身动力和控制能力来实现各种功能的一种机器。它可以接受人类指挥,也可以按照预先编排的程序运行,现代的工业机器人还可以根据制定的原则纲领行动。机器人可以分为:娱乐性机器人,服务用机器人,工业用机器人。此次学习主要对工业机器人的编程软件进行了培训。在国外,机器人大约在20世纪50年代末就已经应用在工业生产中,但是在中国,只有少数几家大型企业有采用机器人操作。随着人口红利的逐渐下降,企业用工成本不断上涨,工业机器人正逐步走进公众的视野。有专家认为,
人口红利的持续消退,给机器人产业带来了重大的发展机遇;在国家政策支持下,产业有望迎来爆发期。 随着企业大量使用机器人也催生出大量需求的懂得组装操作和维修的人才,为此全国大多数职业院校都开办了相关专业,为广大企业培训相关人员。 这次培训班的学习,是我们每一个参训者都收益良多,一段在职教领域具有先进性和代表性的专业理论知识和技能操作的学习培训,给我们实实在在的专业提升。 通过这次培训,我不但夯实了理论基础,提高了专业技能,还与同行进行了交流,分享了教学经验,真实受益匪浅。进一步增强了自己对教学的责任心和责任感,从别的老师身上学到很多东西,包括他们对教学工作严谨负责的态度、精益求精的精神,以及他们宝贵的教学方法和教学经验。我也希望以后继续有机会接受这样的培训,以便更好地完成教学任务,更加努力地提高自己职教理论水平和专业技能素质,坚定不移地从事职业教育。 这段时间的学习、实践,使我更加清晰的看到了自身知识和能力的不足,作为一名青年教师,应该更加客观地去重新认识、评价自我,能让我们产生一种紧迫感和危机感,又激发了我们潜心思考自身的发展问题。不断地去提高自身素质,争当一名教学理念新、奉献精神强、师德高尚、有精湛专业技能的“双师型”素质的专业教师。增强以后适应社会、服务社会的能力,并更好地适应教学的需要,培养出更适应社会需要的人才。
人工智能期末复习资料
1.什么是智能体?什么是理性智能体?智能体的特性有哪些?智能体的分类有哪些? 智能体定义:通过传感器感知所处环境并通过执行器对该环境产生作用的计算机程序及其控制的硬件。 理性智能体定义:给定感知序列(percept sequence)和内在知识(built-in knowledge),理性智能体能够选择使得性能度量的期望值(expected value)最大的行动。 智能体的特性:自主性(自主感知学习环境等先验知识)、反应性(Agent为实现自身目标做出的行为)、社会性(多Agent及外在环境之间的协作协商)、进化性(Agent自主学习,逐步适应环境变化) 智能体的分类: 简单反射型智能体:智能体寻找一条规则,其条件满足当前的状态(感知),然后执行该规则的行动。 基于模型的反射型智能体:智能体根据内部状态和当前感知更新当前状态的描述,选择符合当前状态的规则,然后执行对应规则的行动。 基于目标的智能体:为了达到目标选择合适的行动,可能会考虑一个很长的可能行动序列,比反射型智能体更灵活。 基于效用的智能体:决定最好的选择达到自身的满足。 学习型智能体:自主学习,不断适应环境与修正原来的先验知识。 2.描述几种智能体类型实例的任务环境PFAS,并说明各任务环境的属性。 答题举例: 练习:给出如下智能体的任务环境描述及其属性刻画。 o机器人足球运动员 o因特网购书智能体 o自主的火星漫游者 o数学家的定理证明助手 二、用搜索法对问题求解 1.简述有信息搜索(启发式搜索)与无信息搜索(盲目搜索、非启发式搜索)的区别。 非启发式搜索:按已经付出的代价决定下一步要搜索的节点。具有较大的盲目性,产生较多的无用节点,搜索空间大,效率不高。 启发式搜索:要用到问题自身的某些信息,以指导搜索朝着最有希望的方向前进。由于这种搜索针对性较强,因而原则上只需搜索问题的部份状态空间,搜索效率较高。 2.如何评价一个算法的性能?(度量问题求解的性能) 完备性:当问题有解时,算法是否能保证找到一个解; 最优性:找到的解是最优解; 时间复杂度:找到一个解需要花多长时间 搜索中产生的节点数 空间复杂度:在执行搜索过程中需要多少内存 在内存中存储的最大节点数 3.简述几种搜索方式的思想。 非启发式搜索: 广度优先搜索:首先扩展根节点,接着扩展根节点的所有后续,然后在扩展它们的后续,依