雷达信号matlab仿真1
雷达系统分析大作
作 者: 陈雪娣 学号:0410420727
1. 最大不模糊距离: ,max 1252u r
C R km f == 距离分辨率: 1502m
c
R m B ?=
= 2. 天线有效面积: 220.07164e G
A m λπ
==
半功率波束宽度:
3 6.4o db θ=
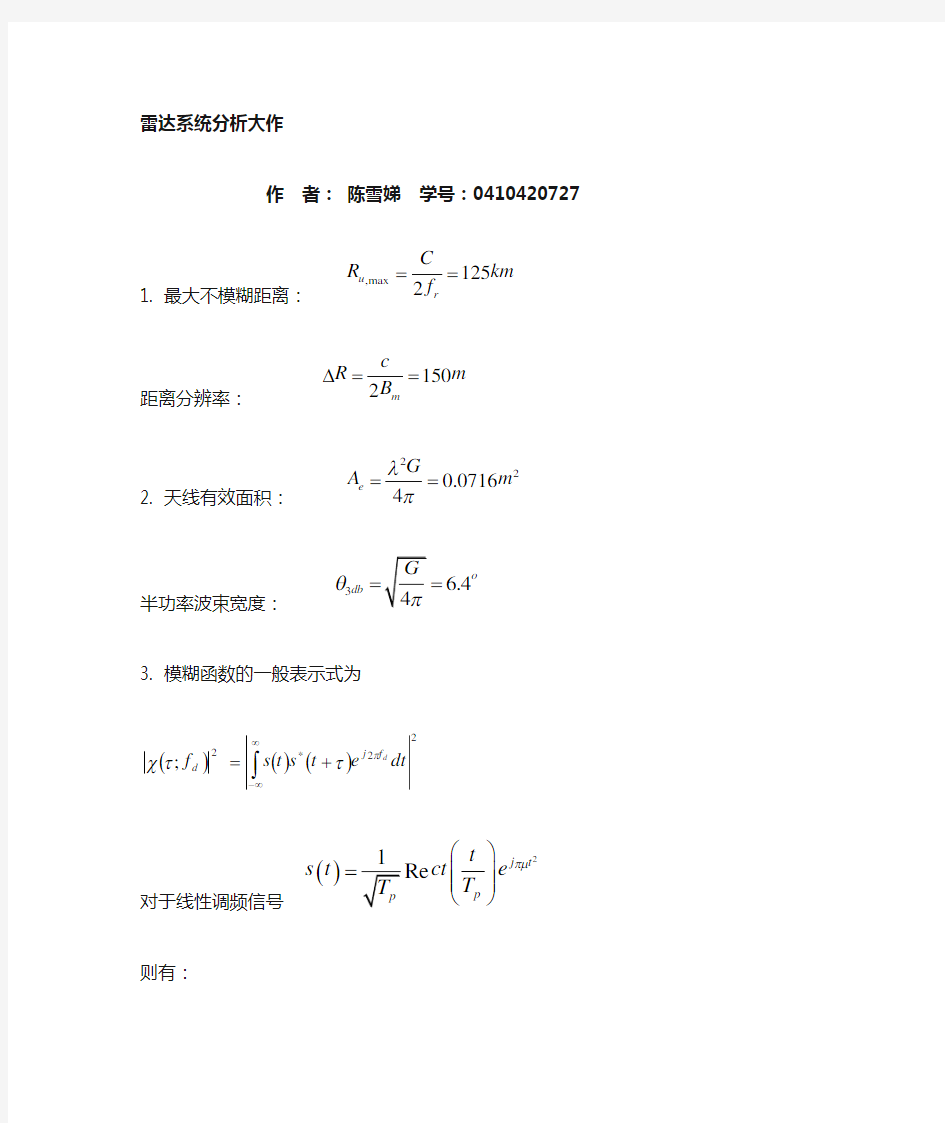
= 3. 模糊函数的一般表示式为
()
()()2
2*
2
;?
∞
∞
-+=
dt e t s t s f d f j d πττχ 对于线性调频信号 (
)2Re j t p t s t ct e T πμ??= ? ???
则有:
()()2
21
;Re Re p j t T j t d p
p
p t t f ct ct e e dt T T T πμπμτ
χτ∞+-∞????+=
? ? ? ?????
? ()
()()sin 1;11d p p d p d p p f T T f T f T T τπμττχττπμτ????+- ?
? ? ???????=- ?
?????+-
? ?
??
分别令0,0==d f τ可得()()2
2
0;,;0τχχd f
()()
sin 0;d p d d p
f T f f T πχπ=
()sin 1;011p p p p p T T T T T τπμττχττπμτ????- ? ? ? ???????=- ? ???
??- ? ??
? 程序代码见附录1的T_3.m, 仿真结果如下
:
4. 程序代码见附录1的T_4.m, 仿真结果如下:
通过比较得知,加窗后的主副瓣比变大,副瓣降低到40db 以下,但主瓣的宽度却增加了,约为未加窗时的1.5倍,主瓣也有一定的损失。 5.由雷达方程
22134
0(4)t
PG Te SNR KT LFR λσπ=
计算可得 1196.5540log SNR R =- db 作图输出结果如下,程序代码见附录1的
T_5.m
在R=70km 时,计算得单个脉冲的SNR 1=2.7497 db,要达到要求的检测性能则需要12.5dB 的最小检测输入信噪比,而M 个相参脉冲积累可以将信噪比提高M 倍, 故 1
0)
1(SNR D M =
=9.4413 因此要达到要求就需要10个以上的相参脉冲进行积累。可求得可积累脉冲数为: 3256db
r a
N f θ=
=Ω
其中,a Ω为天线的搜索速度等于30o /s.r f 是重复频率为1200hz.故满足要求.
6. 设t 时刻弹舰径向与目标航向的夹角为a (t),目标偏离弹轴方向的夹角为t β(),在
t=0时,31o o αα==(), 1o β
β==(0). 由几何关系知, sin cos o o OM R MP R αα
==
经t 秒后,
''cos '''sin '
s a a M P MP V t V t O M OM V t αα=--=-
''()''O M t arctan M P α??
=
???
()()'t t βαα=-
sin '
''()sin ()sin ()
a OM V t O M R t t t ααα-=
=
cos ()cos ()d a s V V t V t βα=+
又因为
cos ()cos(()')t t βαα=-
cos ()cos 'sin ()sin '1cos ()sin ()22
t t t t αααααα=+=+
故
1
cos ()sin ()cos ()22d a s V V t t V t ααα??=++
???
()d f
t 1
cos ()sin ()22d a s V V t t αα??=++ ???
221
cos ()sin ()22d
d a s V f V t t ααλλ????==++ ? ? ?????
利用以上的关系式即可计算出第i 个重复周期弹目间的距离()i R t 和回波信号的多普勒频率
()d f t .仿真程序代码见附录1的T_6.m.实验结果如下
:
由仿真结果可知,
()d f t 的变化不大,这表明相对速度的变化不大,同时可求得
688/Vd m s ≈.
7. (1)相干积累:
由于相对速度的变化不大,所以在仿真时取定值688/Vd m s =。
仿真程序代码见附录1的T_7_1.m.实验结果如下:
相干积累前后的信噪比情况如下图所示:
由仿真结果知,积累前匹配滤波器输出的信噪比为约12dB 。已知M 个脉冲相参积累可以将信噪比提高M 倍,所以,64个脉冲相参积累后的信噪比将提高64倍(18db )。相干积累后输出的信噪比约30db ,与预期效果相符。 (2)非相干积累:
双极点滤波器的时域框图如下:
由此可的它的频域响应:
(
2exp 2/d k ξωτ=-
其中 (1
2exp /cos()d d k ξωτωτ=- (
2exp 2/d k ξωτ=-
式中: 0.63ξ
=, 2.2d N ωτ=,N 是半功率波束宽度。
仿真程序代码见附录1的T_7_2.m.实验结果如下:
非相干积累前后的信噪比情况如下图所示:
由仿真结果知,积累前匹配滤波器的信噪比为约12dB。非相干积累后输出的信噪比约20db。将非相干的结果与相干积累的效果进行比较,可知,相干积累的效果明显优于非相干积累。
附录 1 程序代码
第3题:
%%%%%%%% T_3.m %%%%
clear all
clc
clf
taup=1; %脉冲宽度 100us
b=10; %带宽
up_down=-1; %up_down=-1正斜率, up_down=1负斜率
x=lfm_ambg(taup,b,up_down); %计算模糊函数
taux=-1.1*taup:.01:1.1*taup;
fdy=-b:.01:b;
figure(1)
mesh(100*taux,fdy./10,x) %画模糊函数
xlabel('Delay - \mus')
ylabel('Doppler - MHz')
zlabel('| \chi ( \tau,fd) |')
title('模糊函数')
figure(2)
contour(100.*taux,fdy./10,x) %画等高线
xlabel('Delay - \mus')
ylabel('Doppler - MHz')
title('模糊函数等高线')
grid on
N_fd_0=(length(fdy)+1)/2; % fd=0 的位置
x_tau=x(N_fd_0,:); % 时间模糊函数
figure(3)
plot(100*taux,x_tau)
axis([-110 110 0 1])
xlabel('Delay - \mus')
ylabel('| \chi ( \tau,0) |')
title(' 时间模糊函数')
grid on
N_tau_0=(length(taux)+1)/2; % tau=0 的位置
x_fd=x(:,N_tau_0); % 速度模糊函数
figure(4)
plot(fdy./10,x_fd)
xlabel('Doppler - MHz')
ylabel('| \chi ( 0,fd) |')
title(' 速度模糊函数')
grid on
x_db=20*log10(x+eps);
[I,J]=find(abs(x_db+6)<0.09); %取6db点的位置
I=(I-b/.01)/(1/.01); %Doppler维坐标变换J=(J-1.1*taup/.01)/(1/.01); %时间维坐标变换figure(5) %6db 的等高线
plot(J*100,I/10,'.')
axis([-110 110 -1 1])
xlabel('Delay - \mus')
ylabel('Doppler - MHz')
title('模糊函数 6db 的等高线')
grid on
%- - - - 模糊函数 - - -
function x=lfm_ambg(taup,b,up_down)
% taup 脉冲宽度;
% b 带宽;
%up_down=-1正斜率, up_down=1负斜率
eps=0.0000001;
i=0;
mu=up_down*b/2./taup;
for tau=-1.1*taup:.01:1.1*taup
i=i+1;
j=0;
for fd=-b:.01:b
j=j+1;
val1=1-abs(tau)/taup;
val2=pi*taup*(1-abs(tau)/taup);
val3=(fd+mu*tau);
val=val2*val3+eps;
x(j,i)=abs(val1*sin(val)/val);
end
end
%%%%%%%%%%%%%%%%%%
第4题:
%T_4.m
%%%%%%% 利用频域处理方法进行脉冲压缩 %%%%%%% clear all
clc
clf
eps = 1e-10;
Te=100e-6; %脉冲带宽
Bm=1e6; %调频
mu=Bm/Te; %调频斜率
Ts=1/(2*Bm); %采样周期
Ns=fix(Te/Ts); %采样点数
Nf=1024; % fft点数
t=0:Ts:Te-Ts;
y=exp(j*pi*mu*t.^2); %脉冲压缩前的线形调频信号
yfft = fft(y,Nf) ;
h=zeros(1,Ns);
for i=1:Ns
h(i)=conj(y(Ns-i+1));
end
hfft= fft(h,Nf); % 匹配滤波器的频域响应
ycomp =abs(ifft(yfft .*hfft)); %脉冲压缩
maxval = max (ycomp);
ycomp = eps + ycomp ./ maxval; % 利用最大值归一化
ycomp_db=20*log10(ycomp); %取对数
%%%%%%%%%%%%%% 加窗处理 %%%%%%%
win = hamming(Ns)';
h_w=h.*win; % 加窗
hfft_w=fft(h_w,Nf); % 加窗的匹配滤波器的频域响应
ycomp_w = abs(ifft(yfft .*hfft_w)); %脉冲压缩
maxval1 = max(ycomp_w);
val=ycomp_w ;
ycomp_w = eps + ycomp_w ./ maxval; % 利用ycomp的最大值归一化ycomp_w1 = eps + val./ maxval1; % 利用ycomp_w的最大值归一化ycomp_w_db=20*log10(ycomp_w); %取对数
ycomp_w1_db=20*log10(ycomp_w1); %取对数%%%%%%%%%%%%%%%%
tt =0:Ts:2*Te-Ts;
figure(1)
plot (tt,ycomp_db(1:2*Ns),'g')
axis([.2*Te 1.8*Te -60 0] )
xlabel ('t - seconds ');
ylabel(' db')
title('没有加窗的脉冲压缩输出')
grid on
figure(2)
plot (tt,ycomp_w1_db(1:2*Ns),'r')
axis([.2*Te 1.8*Te -60 0] )
xlabel ('t - seconds ');
ylabel(' db')
title('加窗的脉冲压缩输出')
grid on
figure(3)
plot (tt,ycomp_db(1:2*Ns),'g',tt,ycomp_w_db(1:2*Ns),'r') axis([.7*Te 1.3*Te -60 0] )
xlabel ('t - seconds ');
ylabel(' db')
legend('未加窗','加窗');
title('脉冲压缩输出对比')
grid on
%%%%%%%%%
第5题:
% T_5.m
%%%%%%%%%SNR与距离的关系 %%%%%%
clear all
clc
eps=1e-10;
c = 3.0e+8; % spee
d of light
lambda =0.03; % 波长
pt=20; %峰值功率
lambda=0.03; %波长
tao=100e-6; %发射脉冲宽度
G_db=30; %天线增益 in db
sigma=1000; %RCS
k=1.38e-23; % Boltzman's constant
To=290; %标准室温
F_db=2; % 噪声系数 in db
L_db=5; % 系统损失 in db
R=70e3:-100:0; %距离
val=10*log10((pt*tao*lambda^2*sigma)/((4*pi)^3*k*To))+ 2*G_db-F_db-L_db;
SNR=val-40*log10(R);
figure(1)
plot(R./1e3,SNR)
title('SNR与距离的关系')
xlabel('距离 - km')
ylabel('SNR - db')
grid on
SNR1=val-40*log10(70e3)%计算R=70km时的SNR %%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
第6题:
% T_6.m
clear all
clc
lembda=0.03; %波长
fr=1200; %重复频率
tra=180/pi; % 度到弧度的转化量
alpha=31/tra; % t=0时弹舰径向与目标航向的夹角
alpha_p=30/tra;% 导弹运动方向与目标航向的夹角
Ro=70e3; % t=0时的弹舰距离
Vs=10; % 舰船速度
Va=680; % 导弹速度
OM=Ro*sin(alpha); % t=0时弹舰垂直距离
MP=Ro*cos(alpha); % t=0时弹舰垂直距离%%%%%%%%%%%%%%
t=0:1/fr:10;
OM_t=OM-0.5*Va.*t; % t时刻弹舰垂直距离
MP_t=MP-Vs.*t-sqrt(3)*Va.*t/2;% t时刻弹舰垂直距离
alpha_t=atan(OM_t./MP_t); %t时刻弹舰径向与目标航向的夹角
R_t=OM_t./sin(alpha_t); %t时刻弹舰距离
% t时刻弹舰径向速度
vd_t=(sqrt(3)/2*Va+Vs).*cos(alpha_t)+0.5*Va.*sin(alpha_t);
fd_t=2*vd_t/lembda; %t时刻多普勒频移%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%
figure(1)
plot(t,R_t)
title ('t时刻弹舰距离')
xlabel('时间 - s')
ylabel('弹舰距离 - m')
figure(2)
plot(t,fd_t)
title('t时刻多普勒频移')
xlabel('时间 - s')
ylabel('多普勒频移 - hz')
%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 第7题:
%T_7_1.m
% 相干积累
clear all
clc
clf
c=3e8; % speed of light
Te=100e-6; % 发射脉冲宽度
Be=1e6; %带宽
mu=Be/Te; %调频斜率
Ts=1/(2*Be); %采样频率
Ro=70e3; % 起始距离
fo=c/0.03; % 中心频率
Vr=688; %径向速度
t=0:Ts:Te-Ts;
W=exp(j*pi*mu*t.^2);
Wf=fft(W,1024); %%%%%%%%%%%%%%%%%%%%%%%
nnn=fix((Ro-30e3)/75);%采样的起始位置,从30km开始采样
R=0:75:15e3-75; %在30km和45km之间采样,采样间隔75m for i=1:200
for k=1 :64
Ri(k,i)=R(i)-Vr*Ts*(k-1);
end
end
taoi=2*Ri/c;
echo=10^0.225*0.707*(randn(64,1024)+j*randn(64,1024));
j=sqrt(-1);
for i=1:64 %回波信号
echo(i,nnn:nnn+199)=echo(i,nnn:nnn+199)+...
exp(-j*2*pi*fo*taoi(i,:)+j*pi*mu*taoi(i,:).^2); end
for i=1:64 %脉冲压缩
sp2(i,:)=ifft(fft(echo(i,:),1024).*conj(Wf),1024);
end
for k=1:1024 % 相干积累
sct(:,k)=abs(fftshift(fft(sp2(:,k),256)));
end
sct=sct./max(max(sct));%归一化
sp=sp2./max(max(sp2));%归一化
%积累前后信噪比输出
figure(1)
plot(20*log10(abs(sp')))
ylabel('-db')
title('相干积累前')
axis([1 1024 -30 0])
figure(2)
plot(20*log10(sct'))
ylabel(' - db')
title('相干积累输出')
axis([1 1024 -30 0])
%%%%%%%%%积累结果输出
r=((1:1024)*75+30e3)./1e3;
dp=(-128:127)*(Be/128)/1e3;
figure(1)
mesh(r,dp,sct)
xlabel('距离 km')
ylabel('Doppler - kHz')
title('相干积累输出结果')
figure(2)
contour(r,dp,sct)
axis([30 100 -200 200])
xlabel('距离 km')
ylabel('Doppler - kHz')
title('R-fd 等高线')
grid on
dp=(-32:31)*(Be/32)/1e3;
figure(3)
mesh(r,dp,abs(echo)/max(max(abs(echo))))
xlabel('距离 km')
ylabel('Doppler - kHz')
title('相干积累前的结果')
% T_7_2.m
% 非相干积累
clc
clear all
c=3e8; % speed of light
Te=100e-6; % 发射脉冲宽度
Be=1e6; %带宽
mu=Be/Te; %调频斜率
Ts=1/(2*Be); %采样频率
Ro=70e3; % 起始距离
fo=c/0.03; % 中心频率
Vr=688; %径向速度
fr=1200; %重复频率
t=0:Ts:Te-Ts;
W=exp(j*pi*mu*t.^2);
Wf=fft(W,1024);
%%%------- 双极点滤波器 -----%%%%%%
sheta_3_db=6.4; %半功率波束宽度
v=30; % 天线的搜索速度
N=sheta_3_db*fr/v;
wd_tao=2.2/N;
xi=0.63;
k1=2*exp(-xi*wd_tao/sqrt(1-xi^2))*cos(wd_tao); k2=exp(-2*xi*wd_tao/sqrt(1-xi^2));
NN=64;
w=-pi:pi/NN:pi-pi/NN;
j=sqrt(-1);
H=exp(-j.*w)./(1-k1*exp(-j*w)+k2*exp(-2*j.*w));
h=ifft(H,64);
%%- - - - 信号处理 - - - %
nnn=fix((Ro-30e3)/75);%采样的起始位置,从30km开始采样
R=0:75:15e3-75; %在30km和45km之间采样,采样间隔75m for i=1:200
for k=1 :64
Ri(k,i)=R(i)+Vr*Ts*(k-1);
end
end
taoi=2*Ri/c;
echo=10^0.275*0.707*randn(64,1024)+j*randn(64,1024);
j=sqrt(-1);
for i=1:64 %回波信号,加随机相位模拟非相干信号
echo(i,nnn:nnn+199)=echo(i,nnn:nnn+199)...
+exp(-j*2*pi*fo*taoi(i,:)+j*pi*mu*taoi(i,:).^2 ... +j*2*pi*rand*ones(1,200));
end
for i=1:64 %脉冲压缩
sp2(i,:)=ifft(fft(echo(i,:),1024).*conj(Wf),1024); end
for i=1:1024 %用双极点滤波器进行非相干积累
isct(:,i)=conv((sp2(:,i)),h)';
end
for k=1:1024
sct(:,k)=abs(fftshift(fft(isct(:,k),256)));
end
sct=sct./max(max(sct)); %归一化
sp2=sp2./max(max(abs(sp2))); %归一化
%积累前后信噪比输出
figure(1)
plot(20*log10(abs(sp2')))
ylabel('-db')
title('非相干积累前')
axis([1 1024 -30 0])
figure(2)
plot(20*log10(sct'))
ylabel(' - db')
title('非相干积累输出')
axis([1 1024 -30 0])
%%%%%%%%%积累结果输出
r=((1:1024)*75+30e3)./1e3;
dp=(-128:127)*(Be/128)./1e3;
figure(3)
mesh(r,dp,sct)
xlabel('距离 km')
ylabel('Doppler - kHz')
title('非相干积累输出结果')
figure(4)
contour(r,dp,sct)
axis([30 100 -200 200])
xlabel('距离 km')
ylabel('Doppler - kHz')
title('R-fd 等高线')
grid on
dp=(-32:31)*(Be/32)/1e3;
figure(5)
mesh(r,dp,abs(echo)/max(max(abs(echo))))
xlabel('距离 km')
ylabel('Doppler - kHz')
title('非相干积累前的结果')
%%%%%————————%%%%%%
二翻译
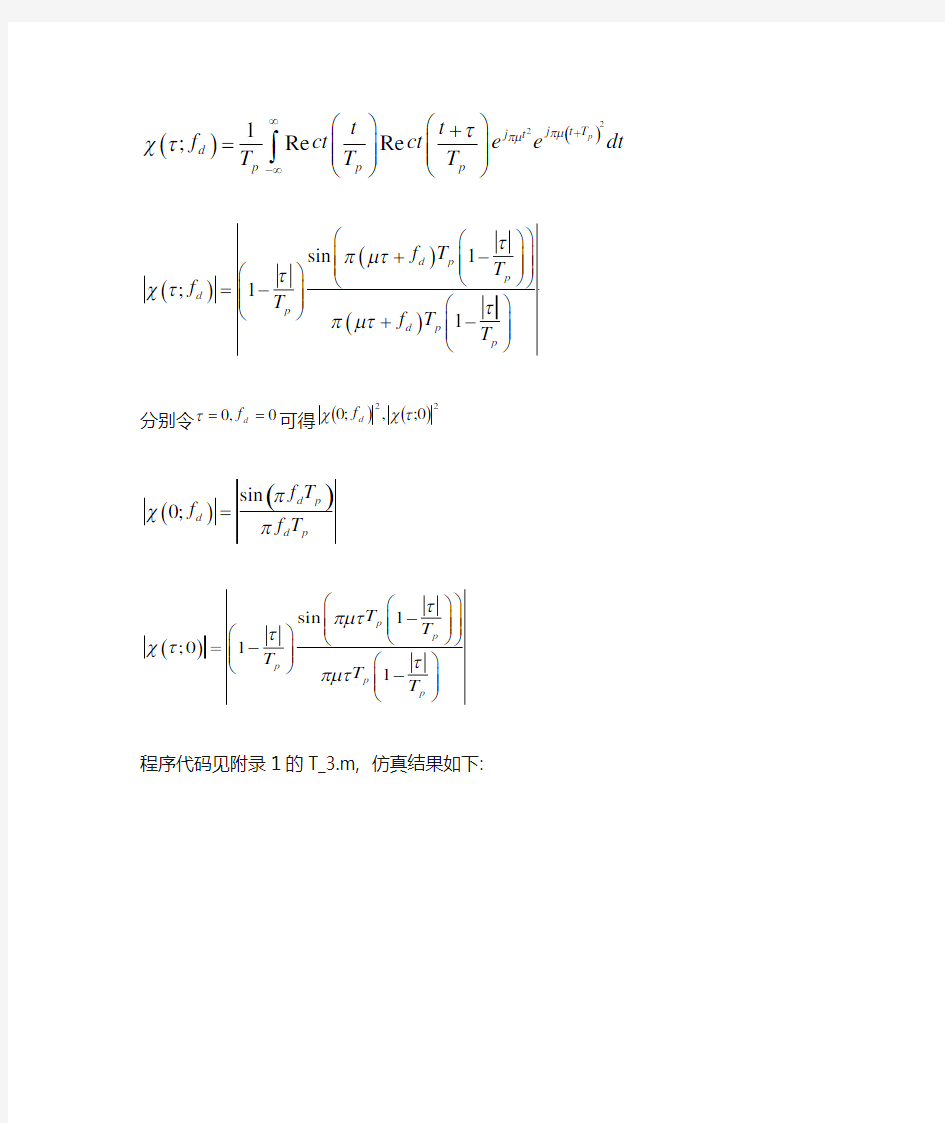
11.2比幅单脉冲
比幅单脉冲跟踪类似于对于圆形区域而言需要四个斜的波束来测量目标的角度位置。区别就是这四个波束是同时产生而不是相继产生的。因为这个目的,一种特殊的天线馈电正是利用一个单独的脉冲产生四个波束原理,因此它的名字叫做单脉冲。并且,单脉冲跟踪更加精确并且不容易受圆柱形的近点角的影响,比如调幅干扰和获得的倒置的电子对抗措施。最后,连续并且圆锥形变化的雷达回波降低了跟踪的精度;尽管如此,自从一个单独的脉冲被用来产生错误信号后者对单脉冲技术已经不是一个问题。单脉冲跟踪雷达既可以用天线反射器又可以用相控阵天线。
图11.7 显示了一种典型的单脉冲天线的模型。A,B,C,D四个波束描绘出四个圆锥形扫描波束的位置。这四个方向,大体上呈喇叭状,用来产生单脉冲
天线的模式。振幅单脉冲处理器要求这四个信号有相同的相位但却有不同的幅度。
图11.7 单脉冲天线模型
一个解释振幅单脉冲技术的好方法就是用天线轴线的圆形中心来表示目标回波信号,正如图11.8a所示,在图中四个象限表示四个波束。在这种情况下,这四个喇叭接受相等的能量,这就显示目标位于天线跟踪的轴线上。然而,当目标不在轴线上时(图11.8b-d),各喇叭中的能量就会不平衡。这个不平衡的能量用来产生差信号来驱动伺服控制系统。单脉冲处理包括计算天线模型的一个加∑两个不同的差?(方位角和仰角)然后除去差信道的电压核信道的电压,信号的角度就可以确定了。
图11.8用图形解释单脉冲的概念(a) 目标在轴线
上(b-d)目标不在轴线上
雷达通过不断比较返回波束的幅度和相位来判断目标对轴线的位移。四个
信号的相位相位在传输和接受模式都是连续的,这是关键性的。因此,任何数字电路或是微波比较电路都可以利用。图11.9显示了一个典型的微波比较仪的方框图,图中三个接收通道分别被称为加通道,仰角差通道和方位角差通道。
图11.9 单脉冲比较器
为了产生仰角差波束,我们可以用波束差(A-D)或(B-C)。然而,通过先形成和的形式(A+B)和(D+C)然后计算(A+B) -(D+C)的差,我们获得一个更强的仰角差信号,?el。同样,通过首先形成和的形式(A+B)和(D+C) 然后计算(A+B) -(D+C)的差,一个更强的方位角差信号,?az,也产生了。
一个简单的单脉冲雷达的结构方框图如图11.10.所示。加通道被用作发射和接收。在接收机中加通道为其他两个不同的通道提供相位参考。加通道还可以用来测距。为了说阐明加通道和差通道的天线模型是如何形成的,我们