仿人机器人关节驱动微型伺服系统_杨明
体内微型机器人的全方位旋进驱动特性
文章编号:100220446(2006)0620560205 体内微型机器人的全方位旋进驱动特性3 张永顺,张凯,张林燕 (大连理工大学精密与特种加工教育部重点实验室,辽宁大连 116024) 摘 要:提出了一种由外旋转磁场驱动的体内微机器人.它以相邻径向异向磁化瓦状多磁极圆筒形NdFe B永磁体为外驱动器,以机器人内嵌同结构的NdFe B永磁体为内驱动器,外驱动器旋转时产生旋转磁场,通过磁机耦合作用于内嵌驱动器形成机器人驱动力矩,在本体外表面螺纹与流体动压力的作用下,实现机器人在管道内的在线旋进.在建立微机器人游动模型的基础上,以垂直管道为试验环境,研究了机器人的全方位驱动特性,试验结果表明机器人可以实现管道内全方位驱动. 关键词:体内微型机器人;旋转磁场;游动特性;全方位驱动 中图分类号: TP24 文献标识码: B Sp i ra l D r i ve Character isti cs of a M i cro Robot I n si de Human Body Z HANG Yong2shun,Z HANG Kai,ZHANG L in2yan (Key L aboratory for Precision&N on2traditional M achining of M inistry of Education,D alian U niversity of Technology,D alian116024,China) Abstract:A ne w m icr o r obot inside hu man body driven by exteri or r otating magnetic field is p r oposed.It takes a cylindri2 cal NdFe B multi pole per manentmagnet composed of several neighboring tegular magnetsmagnetized anis otr op ically al ong ra2 dial directi on as exteri or actuat or,and a magnet with the same structure e mbedded inside the r obot body as the inner actua2 t or.The r obot scre ws for ward inside p i pe under the acti on bet w een s p iral rib on the exteri or surface of r obot body and fluid dyna m ic p ressure when r obot r otates by magnetic t orque,which is generated by magnet o2mechanical coup ling fr om r otating exteri or actuat or t o inner one.Based on a ne wly devel oped s wi m m ing mathe matical model,its characteristics of omni2direc2 ti onal drive is studied in the envir on ment of erect p i pe.Experi m ental results show that the r obot can realize omni2directi onal drive. Keywords:m icr o r obot inside hu man body;r otating magnetic field;s wi m m ing characteristics;omni2directi onal drive 1 引言(I n troducti on) ME MS技术的发展,使微机器人进入体内执行无创或微创介入医疗作业成为可能.为了安全、可靠地进行肠道内的检查及手术作业,减少病人的痛苦,人们已经研究出微型肠道胶囊内窥镜和胶囊电子药丸.胶囊内窥镜可以无线传输检查图像,电子药丸可以通过在肠道内脉冲放电来医治胃肠疾病.它们均随肠道蠕动来完成整个区域检查与作业,并随排泄物排出体外,其过程安全、可靠,但速度缓慢,效率低下,尤其是错过病变组织时,不能主动返程进行集中局部观察与治疗,使肠道内的一些医疗作业无法完成. 为了实现胶囊式机器人的体内作业,有必要对其实施安全有效的主动驱动控制和姿态调整,尤其要求机器人具有全方位驱动功能,这样才能实现机器人的可靠作业. 日本Ishiya ma等人利用三轴亥姆霍兹线圈提供空间旋转磁场,通过加载电流控制磁场强度及方向,作用于胶囊内嵌磁体带动其旋转,在胶囊表面螺纹与液体的作用下实现旋进[1,2],通过调整外旋转磁场平面的方向对微机器人进行姿态控制[3,4].但通电线圈所产生的驱动力矩小,驱动不安全,尤其当驱动频率较高时,线圈的能量损耗较大,大大降低了机器人的效率. 第28卷第6期 2006年11月机器人 ROBO T Vol.28,No.6 Nov.,2006 3基金项目:国家自然科学基金资助项目(60275034);辽宁省自然科学基金资助项目(20021061,20032119). 收稿日期:2006-01-13
机器人腕部毕业设计(机械毕业设计)
机器人技术是综合了许多学科的知识,例如计算机、控制论、机构学、信息和传感技术、人工智能、仿生学等多学科而形成的高新技术,是当今研究领域十分重视的课题,机器人在很多领域都得到广泛应用。机器人的应用情况,是一个国家工业自动化水平的重要标志,因而受到各先进工业国家的重视,投入大量人力物力加以研究和应用。 本文的主要任务和要解决的问题,是设计一台六自由度的机器人,在已有的技术资料的基础上,通过分析,确定腕部的传动系统,然后假设腕部末端的结构,确定腕部的输出功率,然后计算出腕部所需的电机。在确定电机和传动机构的基础上,对锥齿轮和传动中所需的带轮以及同步齿形带进行设计,并且对它们进行校核,确定所设计的腕部结构能够配合机器人的其他结构进行喷漆动作。并用CAD软件完成从建模到运动学分析、应力分析的全过程。需要全面理解机械原理、机械设计、机械系统设计以及CAD制图标准等相关的知识,并考虑其可靠性、实用性、经济性等性能。 本课设在已有理论基础上,针对以往研究的不足,根据实际使用要求,确定采用六自由度的关节型机器人结构方案;由于机器人结构复杂,构件繁多,需要用高端软件配合进行建模,装配的工作,而我们现有的材料相当有限,所以本课设只是设计了机器人的腕部结构;并采用CAD绘制了其装备和零件图,并对其中某些零件的强度进行了校核,使腕部的整体结构能够满足工作的要求。 关键词:机器人腕部
1绪论 (1) 1.1机器人的组成 (2) 1.1.1驱动装置 (2) 1.1.2控制系统 (2) 1.1.3执行机构 (2) 1.2机器人分类 (4) 1.2.1按用途分类 (4) 1.2.2按控制形式分类 (4) 1.2.3按驱动方式分类 (4) 1.3腕部结构选形 (5) 1.3.1单自由度手腕 (6) 1.3.2两自由度手腕 (7) 1.3.3三自由度手腕 (8) 1.3.4装配机器人腕部结构选型 (9) 1.4机器人设计 (11) 2末端执行器 (12) 2.1夹持器 (12) 2. 2拟手指型执行器 (13) 2. 3吸式执行器 (13) 3腕部设计 (15) 3.1手腕结构的选择 (15) 3.2传动装置的运动和动力参数计算 (17) 3.2.1选择电机 (17) 3.2.2分配系统传动比和动力参数的设计 (19)
工业机器人用电机驱动系统
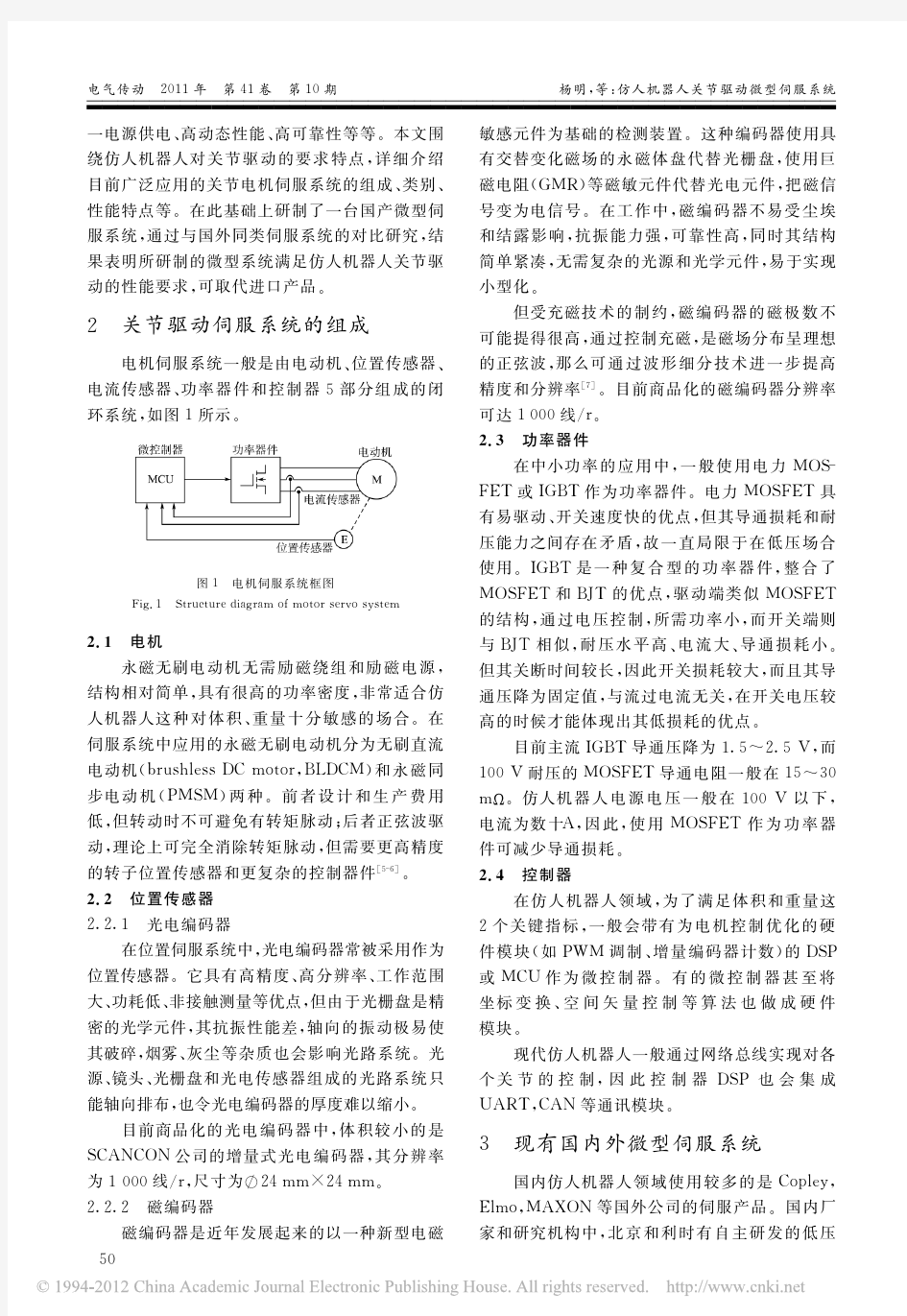
工业机器人用电机驱动系统 机器人电动伺服驱动系统是利用各种电动机产生的力矩和力,直接或间接地驱动机器人本体以获得机器人的各种运动的执行机构。 对工业机器人关节驱动的电动机,要求有最大功率质量比和扭矩惯量比、高起动转矩、低惯量和较宽广且平滑的调速范围。特别是像机器人末端执行器(手爪)应采用体积、质量尽可能小的电动机,尤其是要求快速响应时,伺服电动机必须具有较高的可靠性和稳定性,并且具有较大的短时过载能力。这是伺服电动机在工业机器人中应用的先决条件。 一、机器人对关节驱动电机的主要要求规纳如下 1.快速性 电动机从获得指令信号到完成指令所要求的工作状态的时间应短。响应指令信号的时间愈短,电伺服系统的灵敏性愈高,快速响应性能愈好,一般是以伺服电动机的机电时间常数的大小来说明伺服电动机快速响应的性能。 2.起动转矩惯量比大 在驱动负载的情况下,要求机器人的伺服电动机的起动转矩大,转动惯量小。 3.控制特性的连续性和直线性,随着控制信号的变化,电动机的转速能连续变化,有时还需转速与控制信号成正比或近似成正比。 4.调速范围宽。 能使用于1:1000~10000的调速范围。 5.体积小、质量小、轴向尺寸短。 6.能经受得起苛刻的运行条件,可进行十分频繁的正反向和加减速运行,并能在短时间内承受过载。 目前,由于高起动转矩、大转矩、低惯量的交、直流伺服电动机在工业机器人中得到广泛应用,一般负载1000N(相当100kgf)以下的工业机器人大多采用电伺服驱动系统。所采用的关节驱动电动机主要是AC伺服电动机,步进电动机和DC伺服电动机。其中,交流伺服电动机、直流伺服电动机、直接驱动电动机(DD)均采用位置闭环控制,一般应用于高精度、高速度的机器人驱动系统中。步进电动机驱动系统多适用于对精度、速度要求不高的小型简易机器人开环系统中。交流伺服电动机由于采用电子换向,无换向火花,在易燃易爆环境中得到了广泛的使用。机器人关节驱动电动机的功率范围一般为0.1~10kW。工业机器人驱动系统中所采用的电动机。
机器人的主要驱动方式及其特点
一目前机器人的主要驱动方式及其特点 根据能量转换方式,将驱动器划分为液压驱动、气压驱动、电气驱动和新型驱动装置。在选择机器人驱动器时,除了要充分考虑机器人的工作要求,如工作速度、最大搬运物重、驱动功率、驱动平稳性、精度要求外,还应考虑到是否能够在较大的惯性负载条件下,提供足够的加速度以满足作业要求。 A液压驱动特点 液压驱动所用的压力为5~320kgf/cm2. a)优点 1能够以较小的驱动器输出较大的驱动力或力矩,即获得较大的功率重量比。 2可以把驱动油缸直接做成关节的一部分,故结构简单紧凑,刚性好。 3由于液体的不可压缩性,定位精度比气压驱动高,并可实现任意位置的开停。 4液压驱动调速比较简单和平稳,能在很大调整范围内实现无级调速。 5使用安全阀可简单而有效的防止过载现象发生。 6液压驱动具有润滑性能好、寿命长等特点。 B)缺点 1油液容易泄漏。这不仅影响工作的稳定性与定位精度,而且会造成环境污染。
2因油液粘度随温度而变化,且在高温与低温条件下很难应用。 3因油液中容易混入气泡、水分等,使系统的刚性降低,速度特性及定位精度变坏。 4需配备压力源及复杂的管路系统,因此成本较高。 C)适用范围 液压驱动方式大多用于要求输出力较大而运动速度较低的场合。在机器人液压驱动系统中,近年来以电液伺服系统驱动最具有代表性。 B气压驱动的特点 气压驱动在工业机械手中用的较多。使用的压力通常在0.4-0.6Mpa,最高可达1Mpa。 a)优点 1快速性好,这是因为压缩空气的黏性小,流速大,一般压缩空气在管路中流速可达180m/s,而油液在管路中的流速仅为2.5-4.5 m/s。 2气源方便,一般工厂都有压缩空气站供应压缩空气,亦可由空气压缩机取得。 3废气可直接排入大气不会造成污染,因而在任何位置只需一根高压管连接即可工作,所以比液压驱动干净而简单。 4通过调节气量可实现无级变速。 5由于空气的可压缩性,气压驱动系统具有较好的缓冲作用。
基于图像的视觉伺服系统
基于图像的机器人视觉伺服系统研究 班级:自121 姓名:成佳宇 学号:3120413006
基于图像的机器人视觉伺服系统 摘要本文采用基于图像的眼在手(eye in hand)视觉伺服结构,通过计算图像雅克比矩阵实现机械手的定位任务。本文采用应用最广泛的机器人工具箱(Robotics Toolbox for Matlab),在该工具箱的基础上,运用Sub-system实现Matlab和Simulink的有机结合,建立基于图像反馈的六自由度PUMA560机器人视觉伺服系统Simulink模型,仿真验证该模型的有效性。 关键字:puma560机器人;视觉伺服;图像的雅可比矩阵Abstract:In this paper,we use Image-based visual servoing control system, via image jacobin matrix function the positioning of the manipulator by calculation task. on the basis of Robotics Toolbox for Matlab, and using Sub - system to realize the organic combination of Matlab and Simulink, based on the image feedback Simulink model of six degrees of freedom PUMA560 robot visual servoing system, the simulation verify the validity of the model. Keyword:PUMA560robot;IBVS;Image jacobin 引言: 机器人视觉伺服己成为机器人领域重要的研究内容之一,但是机器人视觉伺服系统是一个十分复杂的非线性系统。视觉是一种复杂的感官,视觉信息中包含有大量的数据,要从 中提取特征信息,需要复杂的算法及耗费大量的运算时间,
机器人视觉伺服系统综述
机器人视觉伺服系统综述 摘要:对机器人视觉伺服系统进行阐述,介绍了机器人视觉伺服系统的概念、发展历程以及研究背景;并从不同的角度对机器人视觉伺服系统进行了分类。最后介绍了该领域的研究现状、所取得的成就,以及今后的发展趋势。 关键词:机器人;视觉伺服;综述 Survey of robot visual servoing system Abstract:: In this paper,the survey of robot visual servoing system are introduced.The paper reviews the concept and history background of robot visual servoing system.This article also classify the robot visual servo system from different aspects. Finally, it introduce the research status quo, achievements and future trends in the field. Key words:robot, visual servoing, summary 1.引言 随着先进科学技术的不断发展,机器人已经在生产和生活中起到了越来越重要的作用,因次人们不断对机器人技术提出更高的要求。为了使机器人能够完成更加复杂的工作,适应更加复杂的环境,机器人不仅需要更加完善的控制统,还需要能够更多的感知环境的变化。而影响其发展的一个重要原因就是机器人缺少像人一样的感知能力,在人们为机器人添加各种外部传感器的过程中,机器人视觉以其信息大、信息完整成为最重要的机器人感知功能[1]。 机器人的视觉伺服系统是机器人的视觉和机器人控制的相结合的复杂系统。其内容包括了图像的采集与处理、运动学和动力学、自动控制理论及其系统数据实时分析等领域于一体的新兴交叉学科。随着摄像技术和计算机技术的发展,以及相关理论的日益完善和实践的不断检验,视觉伺服已具备了在实际中应用的条件;而随着机器人应用领域的不断扩展,重要性也不断提高,与其相关技术问题已经成为了当前的研究热点[2]。所以实现机器人视觉伺服控制有相当的难度,是机器人研究领域中具有挑战性的课题。 2.机器人视觉伺服系统 2.1机器人视觉伺服系统的定义
微型机器人
职业教育机电一体化专业教学资源库新技术新工艺 名称:微型机器人 编制人: 邮箱: 电话: 编制时间:2014.11 编制单位:辽宁省交通高等专科学校
微型机器人 机器人技术是一门快速发展的高新技术,在许多领域得到了日益广泛的应用,并对人类社会产生着日益重大的影响。微型机器人(Micro-Robotics)是指集成了微型作业工具、各种微小型传感器,具有通用编程能力的小型移动机构。 微机电系统(Micro Electromechanical System,MEMS)是指可批量制作的,将微型机构、微型传感器、微型执行器、信号处理和控制电路、以及接口通信和电源等集于一体的微型器件或系统。20世纪80年代后期,随着大规模和超大规模集成电路的迅速发展,微电子技术与机械、光学等学科的交叉融合促进了MEMS技术的迅速发展。MEMS 是目前正在飞跃发展的微米/纳米技术中的一项十分重要的技术,它的成熟和产业化,对经济建设、国防建设乃至社会发展都将产生深远影响。 微型机器人是利用IC(集成电路)微细加工技术,将驱动器和传动装置、传感器、控制器、电源等集成在一起的功能完备的MEMS系统。MEMS技术可将机器人系统的尺寸缩小到几毫米甚至几百微米,这种微型化的趋势经逐渐成为机器人发展领域的一个重要方向。微型机器人的研究方向可以归纳为三个方面:微操作机器人技术,微定位机器人技术和微型机器人技术。 微型机器人结构尺寸微小,器件精密,可进行微细操作,具有小惯性、快速响应、高谐振频率、高附加值等特点。然而,微型机器人并不是简单意义上普通机器人的微小化,微型机器人一般集成有传感、控制、执行和能量单元,是机械、电子、材料、控制、计算机和生物医学等多学科技术的交叉融合。微型机器人的研究,是一个新颖又具有重大实际意义和挑战性的课题。该技术有利于实现真正意义上的微小系统,充分展示了微小系统的巨大魅力;而且建立微型机器人需要更为微小的驱动器、执行器、传感器、处理器等,由此展开的对微型机器人本体加工和微部件的研制,将有利于实现更高意义上的微系统集成,推动MEMS技术继续前进。 ◎微型机器人的组成、关键技术及分类 微型机器人系统一般由四部分组成:微执行器,微传感器,微能源,控制系统。相应的微执行器技术、检测技术、能源供给和控制技术就是微型机器人的关键技术。 ◆微执行器技术
关节机械手腕部设计
第一章绪论 机械工业是国民的装备部,是为国民经济提供装备和为人民生活提供耐用消费品的产业。不论是传统产业,还是新兴产业,都离不开各种各样的机械装备,机械工业所提供装备的性能、质量和成本,对国民经济各部门技术进步和经济效益有很大的和直接的影响。机械工业的规模和技术水平是衡量国家经济实力和科学技术水平的重要标志。因此,世界各国都把发展机械工业作为发展本国经济的战略重点之一。 机械手是近代自动控制领域中出现的一项新技术,并已成为现代机械制造中的一个重要组成部分。机器人显著地提高了劳动生产率,加快实现工业生产机械化和自动化的步伐。尤其在高温、高压、粉尘、噪音以及带有放射性和污染的场合,应用得更为广泛。因而受到各先进工业国家的重视,投入大量人力物力加以研究和应用。 机械手一般分为三类。第一类是不需要人工操作的通用机械手,统称为机器人。它是一种独立的不附属于某一主机的装置。它可以根据任务的需要编制程序,以完成各项规定操作。它的特点是除了具备普通机械的物理性能之外,还具备通用机械、记忆智能的三元机械。它可以灵活运用在工业上的各个方面,如喷漆、焊接、搬运等。第二类是需要人工操作的,称为操作机。它起源于原子、军事工业,先是通过操作机来完成特定的作业,后来发展到用无线电讯号操作机器人来进行探测月球等。工业中采用的锻造操作机也属于这一范畴。第三类是专用机械手,主要附属于自动机床或自动线上,用以解决机床上下料和工件传送。这种机器人在国外称为“Mechanical Hand ",它是为主机服务的,由主机驱动;除少数外,工作程序一般是固定的,采用机械编程。因此是专用的。 本课题通过对通用机器人smart6.50R 的结构进行分析和研究,完成对其腕部的设计,最终期望腕部与小臂、手部、大臂能够协调工作,能够完成各种现代工业加工过程中所要求的动作。 本课题的设计思路是:借助已有的通用机器人的腕部设计思想和方法,综合考虑腕部机构在机器人运动中所起的作用和机器人的整体技术参数。
微型机器人驱动技术
微型机器人驱动技术 目前,微型机器人常用的驱动技术概括起来主要有:气动、热驱动、微电机驱动、智能材料驱动和能量场驱动。其中,智能材料驱动常用的有形状记忆合金( SMA)、人工肌肉材料( IPMC)、压电材料( PZT)、巨磁致伸缩材料( GMA);能量场驱动常用的有微波、光波、磁场和超声波等。 一、气动形式 韩国研制出了单气动线路驱动的蚯蚓型管道检测微机器人。该机器人由前气室、后气室和伸展模块 3 部分组成,3 个气室被一个充气管道连接起来。首先,后气室逐渐充入空气并膨胀,机器人身体后部的夹钳紧贴到被检测管道表面; 然后空气使伸展模块内的气室充气、膨胀,机器人就向前伸展身体; 随着空气的不断充入,前气室也逐渐膨胀并达到特定气压值,身体前部的夹钳紧贴到管道表面; 然后通过排气使后气室在气流反作用力下前进,同时伸展模块收缩。通过气阀使充气和排气循环交替进行,就实现了像蚯蚓一样的运动。
图1、蚯蚓型管道检测微机器人 第二、热驱动形式 美国研制出一种热驱动机器人,它的运动主要由热敏晶片的热胀冷缩来完成,热敏晶片由热膨胀系数不同的两层聚合物中夹一个钛钨合金电阻构成,当加热电流通过回路时,热敏晶片向热膨胀系数小的聚合物一侧弯曲,就实现了单自由度运动。 图2、热驱动机器人 第三、微电机驱动形式 南京航空航天大学研制出了微电机驱动的精子形微机器人。该微机器人由椭圆形的头部和 4 个柔软的鞭毛组成,鞭毛由机器人头部内置的 4 个微电机驱动,当柔软的鞭毛被微电机带动在液体环境中旋转时,它们将形成又长又细的螺旋,液体作用于鞭毛的粘滞力将对微机器人产生推力从而使其前进。
图3、精子形微机器人 第四、智能材料驱动形式 韩国研制了一种形状记忆合金( SMA) 驱动的仿蚯蚓型微机器人。形状记忆合金和波纹管组合使微机器人伸缩前行,具体移动过程是: 硅树脂波纹管作为弹簧提供变形力,当 SMA 弹簧被加热收缩时,微机器人前部的微针钳住接触面,躯干后部向前滑动,同时 SMA 外部的硅树脂波纹管收缩储存变形能;然后,SMA 弹簧冷却,波纹管储存的变形能使 SMA 弹簧伸长,同时,后部的微针钳住接触面,躯干前部向前滑动;最后,波纹管和 SMA 弹簧回到初始平衡状态,二者弹力相等。SMA 的伸缩靠控制系统对形状记忆合金加热-冷却循环交替实现。 图4、仿蚯蚓型微机器人
关节型机器人腕部结构结构设计说明
关节型机器人腕部结构结构设计 1绪论 1.1 选题背景及其意义 本题设计的是关节型机器人腕部结构,主要是整体方案设计和手腕的结构设计及控制系统设计,此课题来源于实际生产,对于目前手工电弧焊接效率低,操作环境差,而且对操作员技术熟练成都要求高,因此采用机器人技术,实现焊接生产操作的柔性自动化,提高产品质量与劳动生产力,实现生产过程自动化, 改善劳动条件。题目要求是:动作范围:手腕回转ο150,摆动ο90,旋转ο360。各 轴最大速度要求:s /30ο。额定载荷kg 5,最大速度s m /3。2、腕部最大负荷: 5kg 。机器人是近30年发展起来的一种典型的、机电一体化的、独立的自动化生产工具。在制造工业中,应用工业机器人技术是提高生产过程自动化,改善劳动条件,提高产品质量和生产效率的有效手段之一,也是新技术革命的一个重要内容。自古以来,人们所设想的机器人一般是一种在外形和功能上均能模拟人类智能的机器。特别是在20世纪20年代前后,捷克和美国的一些科幻作家创作了一批关于未来机器人与人类共处中可能发生的故事之类的文学作品,更使机器人在人们的思想中成为一种无所不能的“超人”。在现实生活中,一些民间工匠根据这些文学描绘,也制造出一些仿人或仿生的机器人。然而在当时的科技条件下,要使机器人具有某种特殊的“智能”而成为“超人”,显然是不可能的。美国的戴沃尔设想了一种可控制的机械手,他首先突破了对机器人的传统观点,提出机器人并不一定必须像人,但是必须能做一些人的工作。1954年,他依据这一想法设计制作了世界上第一台机器人实验装置,发表了《适用于重复作业的通用性工业机器人》一文,并获得了美国专利。戴沃尔将遥控操纵器的关节型连杆机构与数控机床的伺服轴联结在一起,预定的机械手动作一经编程输入后,机械等就可以离开人的辅助而独立运行。这种机器人也可以接受示教而完成各种简单任务。示教过程中操作者用手带动机械手依次通过工作任务的各个位置,这些位置序列记录在数字存储器中,任务的执行过程中,机器人的各个关节在伺服驱动下再现出那些位置序列。 1.2 文献综述(国内外研究现状与发展趋势) 随着全球能源短缺、环境污染以及温室效应等问题的日益突显。寻找可持续
微型机器人
微型机器人的发展与展望 摘要:微型机器人是微电子机械系统的一个重要分支, 由于它能进入人类和宏观机器人所不及的狭小空间内作业, 近几十年来受到了广泛的关注。本文首先给出了近年来国内外出现的几种微型机器人, 在分析了其特点和性能的基础上, 讨论了目前微型机器人研究中所遇到的几个关键问题, 并且指出了这些领域未来一段时间内的主要研究和发展方向。 关键词:微型机器人; 关键技术;应用
前言 机器人技术是一门快速发展的高新技术,在许多领域得到了日益广泛的应用,并对人类社会产生着日益重大的影响。微型机器人(Micro-Robotics)是指集成了微型作业工具、各种微小型传感器,具有通用编程能力的小型移动机构。微型机器人是利用IC(集成电路)微细加工技术,将驱动器和传动装置、传感器、控制器、电源等集成在一起的功能完备的MEMS系统。MEMS技术可将机器人系统的尺寸缩小到几毫米甚至几百微米,这种微型化的趋势经逐渐成为机器人发展领域的一个重要方向。微型机器人的研究方向可以归纳为三个方面:微操作机器人技术,微定位机器人技术和微型机器人技术。 微型机器人结构尺寸微小,器件精密,可进行微细操作,具有小惯性、快速响应、高谐振频率、高附加值等特点。然而,微型机器人并不是简单意义上普通机器人的微小化,微型机器人一般集成有传感、控制、执行和能量单元,是机械、电子、材料、控制、计算机和生物医学等多学科技术的交叉融合。微型机器人的研究,是一个新颖又具有重大实际意义和挑战性的课题。该技术有利于实现真正意义上的微小系统,充分展示了微小系统的巨大魅力;而且建立微型机器人需要更为微小的驱动器、执行器、传感器、处理器等,由此展开的对微型机器人本体加工和微部件的研制,将有利于实现更高意义上的微系统集成,推动MEM S技术继续前进。 1 微型机器人的发展概况 近年来,采用MEMS技术的微型卫星、微型飞行器和能进入狭窄空间的微型机器人展示了诱人的应用前景和军民两用的战略意义。因此, 作为微机电系统技术发展方向之一的基于精密机械加工微机器人技术研究已成为国际上的一个热点, 这方面的研究不仅有强大的市场推动, 而且有众多研究机构的参与。以日本为代表的许多国家在这方面开展了大量研究, 重点是发展进入工业狭窄空间微机器人、进入人体狭窄空间医疗微系统和微型工厂。国内在国家自然科学基金、863 高技术研究发展计划等的资助下, 有清华大学、上海交通大学、哈尔滨工业大学、广东工业大学、上海大学等科研院所针对微型机器人和微操作系统进行了大量研究, 并分别研制了原理样机。 目前国内对微型机器人的研究主要集中在三个领域: (1)面向煤气、化工、发电设备细小管道探测的微型机器人。(2)针对人体、进入肠道的无创诊疗微型机器人。(3)面向复杂机械系统非拆卸检修的微型机器人。 国外:日本、欧美发达国家开展了大量研究,重点发展工业及医疗用管道微机器人和微型工厂。 国内:MEMS技术已列入863计划,促进了微型机器人研究的进步。我国的MEMS技术包括微型机器人技术与国外的差距较大,仍处于不断追赶的过程中。 2 微型机器人的组成 微型机器人系统一般由四部分组成:微执行器,微传感器,微能源,控制系统。相应的微执行器技术、检测技术、能源供给和控制技术就是微型机器人的关键技术。 3 微型机器人的关键技术 3.1 微执行器技术
机器人视觉伺服系统的控制结构
机器人视觉伺服系统的控制结构
机器人视觉伺服系统的控制结构 1 前言 对机器人视觉伺服系统的研究是机器人领域中的重要内容之一,其研究成果可直接用于机器人手—眼系统、移动机器人的自动避障及对周围环境的自适应、轨线跟踪等问题中。通常所说的机器视觉是指:自动获取并分析图像,以得到一组可对景物描述的数据或控制某种动作的数据。而视觉伺服则不同于机器视觉,它利用机器视觉的原理对图像进行自动获取与分析,以实现对机器人的某项控制为目的。正是由于系统以实现某种控制为目的,所以视觉伺服系统中的图像处理过程必须快速准确。 视觉伺服系统采用视觉反馈环形成闭环,在视觉反馈环中抽取某种图像特征。图像特征可以是点、曲线、图像上的某一区域等,比如,它可以是点在图像平面的坐标位置,或投影面的形心及其惯量的高次幂。 2 视觉伺服系统的分类 视觉伺服的控制策略主要基于以下两个问题: 1)是否采用分层控制结构?即机器人是否需要闭环关节控制器?进一步说,就是系统的视觉反馈是为机器人的关节控制闭环提供输入量,还是由视觉控制器直接控制机器人各关节。 2)误差输入量是以机器人所在空间的三维坐标表示,还是以图像特征? 按控制策略2)区分,视觉伺服系统分为两类:基于位置的控制系统(position-based control,又称3D视觉伺服,3Dvisualservoing),基于图像的控制系统(image-base control,或称2D视觉伺服,2Dvisualservoing)。由于基于位置和基于图像的视觉伺服各有其优缺点,于是近年有学者综合上述两类视觉伺服系统的优点,设计出2-1/2D视觉伺服系统。 按控制策略1)区分,视觉伺服系统可分为动态观察—移动系统和直接视觉伺服。前者采用机器人关节反馈内环稳定机械臂,由图像处理模块计算出摄像机应具有的速度或位置增量,反馈至机器人关节控制器;后者则由图像处理模块直接计算机械壁各关节运动的控制量。 3 视觉伺服系统的控制结构 3.1 基于位置的视觉伺服控制结构
第二讲机器人的伺服电机
机器人的伺服电机 机器人的伺服电机是用来将机器人大脑发出的运动指令转换为运动动作的部件,相当于人的肌肉的作用。本讲教你如何连接、调整以及测试机器人伺服电机。为此,你需要理解和掌握控制伺服电机方向、速度和运行时间的相关PBASIC 指令及其编程技术。由于精确地控制伺服电机是决定机器人性能的关键,所以,在把伺服电机安装到机器人底盘之前先熟悉这些内容是非常重要而且必需的。 连续旋转伺服电机简介 机器人伺服电机有很多种,本讲要介绍的主要是能够使你的轮式机器人两个轮子不停旋转的连续旋转伺服电机,如图2-1所示。图中指出了该伺服电机的外部配件,这些配件将在本讲或后续章节中用到。 任务1:将伺服电机连接到教学板 在本任务中首先将伺服电机连接到电源和BASIC Stamp模块的I/O口,然后搭建一个LED 电路来监视BASIC Stamp模块发送到伺服电机的运动控制信号。 连接伺服电机所需的零部件 ●帕拉斯公司生产的连续旋转伺服电机2个; ●搭建LED电路所需的零配件(LED和470欧姆电阻)2套 连接伺服电机到 教学底板 把三位开关拨至0位切断教学底板的电源(图2?2)。 图2-3显示的是教学板上伺服电机接线端子。你可以用板上的跳线 来选择伺服电机的供电电源是来自机器人套件中的电池盒Vin还是来 自外接直流电源Vdd。要移动跳线帽,你必须向上把跳线帽从原来短 接的2个脚上拔下来,然后把跳线帽压进你想短接的2个脚上去。 如果使用6V电池组,将两个伺服电机接线端子之间的跳线帽接Vin,参照图2-3(左图)所示。 如果使用7.5 V、1000 mA的直流电源,将跳线帽接Vdd,参照图2-3(右图)所示。
微型机器人驱动系统
微型机器人的驱动系统种类总结 一、SMA 驱动的全方位轮式蠕动微机器人 形状记忆合金SMA 是一种新型功能材料,其特点是具有形状记忆效应,SMA 驱动器在特殊场合可代替传统驱动器,如马达气缸等,具有功率质量比大、结构简单、无噪音、无污染、易于控制等特点,因此广泛用作微小型机器人驱动器。SMA 驱动器驱动原理如下: 1.SMA 驱动的全方位轮式蠕动过程 ①SMA 弹簧加热收缩,前轮不动(左边轮为前轮),后轮前移动,弹性杆恢复原长,前车体和后车体分别绕轮轴转动至垂直位置。车体外形由图1 (1)变至图1 (2)。 图1(1) 图1 (2) ②SMA 弹簧继续加热收缩,前车轮继续保持不动,后车轮继续向前滚动,弹性杆松弛,偏置弹簧侧向弯曲,前后车体保持垂直姿态。车体外形由图1 (2)变至图1 (3) 图1(2) 图1(3) ③SMA 弹簧冷却,前车轮向前滚动,后车轮在自锁机构的作用下保持不动,弹性橡皮带逐渐由松弛到拉直状态,前后车体仍旧保持与地面垂直姿态。车 体外形由图1(3)变至图1(4)
图1(3) 图1(4) ④SMA 弹簧继续加热收缩,前车轮继续向前滚动,后车轮继续保持不动,弹性杆绷紧,前后车体分别绕轮轴转动至对称位置。车体外形由图1(4)恢复至初始状态图1 (1) 图1(4) 图1(1) 图1 SMA 驱动的全方位轮式蠕动过程示意图 至此微型车完成了一个周期的向前蠕动,重复以上步骤微型车可连续向前蠕动。 2 .存在问题 ①由于偏心轮逆止机构阻止车轮向后滚动因而微型小车只能前进不能后 退。 ②采用单一的SMA 直线驱动器尚无法实现转弯功能。 3.改进方案 针对以上两个方面的缺点,采用双向自锁装置以实现小车的后退功能。如图2所示。
微型机器人的发展
微型机器人的发展 【摘要】微型机器人是微电子机械系统的一个重要分支,由于它能进入人类和宏观机器人所不及的狭小空间内作业,近几十年来受到了广泛的关注。它是随着微机电系统(MEMS)的出现和发展而应运而生的。本文着重介绍近几年微型机器人的发展与在现实生活中的应用。 【关键词】微型机器人;微型机器人的发展; 绪论 微型机器人是现化机器人技术发展的很重要方向,由于其结构尺寸微小、器件精密,可进行微细定位和微细操作,微型机器人可以应用在其他机器人无法应用的场合。 ①对于人烃无法进入的危险区域,如航天飞机、导弹、核动力工厂以及石油化工的管道的探伤和维修更是十分需要微型管道机器人; ②医疗上用于诊断、注药、切除和修补的微型机器人; ③用于操作血球、细胞的微型机器人; ④集成电路的检查和修补以及制作过程中的微定位和微操作; ⑤微型器人还在军事上具有应用价值,例如用来进行军事侦察,具有不易被发现的优点等。 1.微型机器人的出现 1.1 微型机器人出现的基础——微机电系统(MEMS)和微驱动器,微型机器人出现是和微机电系统的发展是分不开的,可以说,微型机器人就是可编程通用的微型机电系统工程。微机电系统的20世纪80年代后期,随着大规模和超大规模集成电路的迅速发展,微电子技术与机械、光学等领域的成功结合而诞生的,是微电子技术的拓宽和延伸,它将电子技术遭到精密机械加工技术相融全,实现了微电子与机械融为一体的系统。和微机电系统一样,微型机器人的发展是和微驱动器的发展也分不开的,轰动世界的突破性
的成就是1987年美国加州大学伯克利分校首先研制出了转子直径为60~120um的微型静电动机,随后MIT也研制出了100um的静电动机。正是微机电系统和微驱动器的出现和发展为微型机器人的出现作了铺垫,使得微型机器人应运而生。 2 微型机器人的发展 2.11 微型机器人发展的现状 据2010年5月13英国《每日邮报》报道研发的“纳米蜘蛛”,这种“纳米蜘蛛”机器人的大小仅有4纳米,比人类头发直径的十万分之一还小。该“纳米蜘蛛”机器人的发明是对几年前“蜘蛛分子”机器人的改进与升级,其功能更加强大,这种纳米机器人不仅能够自由地在二维物体的表面行走,而且还能吞食面包碎屑。虽然以前研制出的DNA分子机器人也具有行走功能,但不会超过3步,而“纳米蜘蛛”机器人却能行走100纳米的距离,相当于行走50步。“纳米”机器人可以用于医疗事业,以帮助人类识别并杀死癌细胞以达到治疗癌症的目的,还可以帮助人们完成外科手术,清理动脉血管垃圾,及组成计算机新硬件等。科学家们已经研发出这种机器人的生产线。 在二维物体表面行走的“纳米蜘蛛”机器人 2.2微型机器人发展中面临的问题 2.2.1驱动器的微型化 微驱动器是MEMS 最主要的部件, 从微型机器人的发展来看, 微驱动技术起着关键用, 并且是微机器人水平的标志,开发耗能低、,结构简单、易于微型化,、位移输出和力输出大, 线性控制性能好, 动态响应快的新型驱动器(高性能压电元件、大扭矩微马达) 是未来的, 2.2.2 能源供给问题 许多执行机构都是通过电能驱动的,但是对于微型移动机器人而言,供应电能的会 严重影响微型机器人的运动, 特别是在曲率变化比较大的环境中。微型机器人发展趋势应是无缆化 , 能量、控制信号以及检测信号应可以无缆发送、传输。微型机器人
关节型机器人腕部结构设计(全套,CAD有图)Word
1前言 1.1机器人的概念 机器人是一个在三维空间中具有较多自由度,并能实现较多拟人动作和功能的机器,而工业机器人则是在工业生产上应用的机器人。美国机器人工业协会提出的工业机器人定义为:“机器人是一种可重复编程和多功能的,用来搬运材料、零件、工具的操作机”。英国和日本机器人协会也采用了类似的定义。我国的国家标准GB/T12643-90将工业机器人定义为:“机器人是一种能自动定位控制、可重复编程的、多功能的、多自由度的操作机。能搬运材料、零件或操持工具,用以完成各种作业”。而将操作机定义为:“具有和人手臂相似的动作功能,可在空间抓放物体或进行其它操作的机械装置”。 机器人系统一般由操作机、驱动单元、控制装置和为使机器人进行作业而要求的外部设备组成。 1.1.1操作机 操作机是机器人完成作业的实体,它具有和人手臂相似的动作功能。通常由下列部分组成: a.末端执行器又称手部,是机器人直接执行工作的装置,并可设置夹持器、工具、传感器等,是工业机器人直接与工作对象接触以完成作业的机构。 b. 手腕是支承和调整末端执行器姿态的部件,主要用来确定和改变末端执行器的方位和扩大手臂的动作范围,一般有2~3个回转自由度以调整末端执行器的姿态。有些专用机器人可以没有手腕而直接将末端执行器安装在手臂的端部。 c. 手臂它由机器人的动力关节和连接杆件等构成,是用于支承和调整手腕和末端执行器位置的部件。手臂有时包括肘关节和肩关节,即手臂与手臂间。手臂与机座间用关节连接,因而扩大了末端执行器姿态的变化范围和运动范围。 d. 机座有时称为立柱,是工业机器人机构中相对固定并承受相应的力的基础部件。可分固定式和移动式两类。 1.1.2驱动单元 它是由驱动器、检测单元等组成的部件,是用来为操作机各部件提供动力和运动的装置。 1.1.3控制装置 它是由人对机器人的启动、停机及示教进行操作的一种装置,它指挥机器人按规定的要求动作。 1.1.4人工智能系统
机器人腕部结构
1、定义:腕部是臂部和手部的连接件,起支承手部和改变手部姿态的作用。 2、手腕的自由度: ?为了使手部能处于空间任意方向,要求腕部能实现对空间三个坐标轴X、Y、Z的旋 转运动。这便是腕部运动的三个自由度,分别称为翻转R(Roll)、俯仰P(Pitch)和偏转Y(Yaw)。 ?并不是所有的手腕都必须具备三个自由度,而是根据实际使用的工作性能要求来确 定。 腕部坐标系手腕的偏转 手腕的仰俯手腕的回转 3、手腕的设计要求 ?结构紧凑、重量轻; ?动作灵活、平稳,定位精度高; ?强度、刚度高; ?与臂部及手部的连接部位的合理连接结构,传感器和驱动装置的合理布局及安装等。 4、手腕的分类 (1)二自由度手腕: 可以由一个R关节和一个B关节联合构成BR关节实现,或由两个B关节组成BB关节实现,但不能由两个RR关节构成二自由度手腕,因为两个R关节的功能是重复的,实际上只起到单自由度的作用。
BR手腕BB手腕 RR手腕(属于单自由度) (2)三自由度手腕: 有R关节和B关节的组合构成的三自由度手腕可以有多种型式,实现翻转、俯仰和偏转功能。 BBR手腕BRR手腕 5.按手腕的驱动方式分: ?直接驱动手腕: ?驱动源直接装在手腕上。这种直接驱动手腕的关键是能否设计和加工出尺寸 小、重量轻而驱动扭矩大、驱动性能好的驱动电机或液压马达。 ?远距离传动手腕: ?有时为了保证具有足够大的驱动力,驱动装置又不能做得足够小,同时也为 了减轻手腕的重量,采用远距离的驱动方式,可以实现三个自由度的运动。
液压直接驱动BBR手腕图例 远距离传动手腕图例 6、典型结构 (1)摆动液压缸(又称回转液压缸): ?结构: ?由缸体、隔板、叶片、花键套等主要部件构成。其中叶片7固定在转子上, 用花键将转子与驱动轴连接,用螺栓2将隔板与缸体连接。 ?工作原理: ?在密封的缸体内,隔板与活动叶片之间围成两个油腔,相当油缸中的无杆腔 和有杆腔。液压力作用在活动叶片的端面上,对传动轴中心产生力矩使被驱
微型机器人简介
《微机电系统设计学》读书报告 ——浅谈微型机器人 吕玉峰21225099 摘要:微型机器人是微机电系统的重要分支,是微机电系统发展的高级形式。本文阐述了微型机器人的概念及关键技术;论述了现阶段国内外的研究现状,介绍了它的应用;最后指出了微型机器人的发展中尚待解决的问题。 关键词:微型机器人,微机电系统 前言 机器人技术是一门快速发展的高新技术,在许多领域得到了日益广泛的应用,并对人类社会产生着日益重大的影响。微型机器人(Micro-Robotics)是指集成了微型作业工具、各种微小型传感器,具有通用编程能力的小型移动机构。 微机电系统(Micro Electromechanical System,MEMS)是指可批量制作的,将微型机构、微型传感器、微型执行器、信号处理和控制电路、以及接口通信和电源等集于一体的微型器件或系统。20世纪80年代后期,随着大规模和超大规模集成电路的迅速发展,微电子技术与机械、光学等学科的交叉融合促进了MEMS技术的迅速发展。MEMS是目前正在飞跃发展的微米/纳米技术中的一项十分重要的技术,它的成熟和产业化,对经济建设、国防建设乃至社会发展都将产生深远影响。 微型机器人是利用IC(集成电路)微细加工技术,将驱动器和传动装置、传感器、控制器、电源等集成在一起的功能完备的MEMS系统。MEMS技术可将机器人系统的尺寸缩小到几毫米甚至几百微米,这种微型化的趋势经逐渐成为机器人发展领域的一个重要方向。微型机器人的研究方向可以归纳为三个方面:微操作机器人技术,微定位机器人技术和微型机器人技术。 微型机器人结构尺寸微小,器件精密,可进行微细操作,具有小惯性、快速