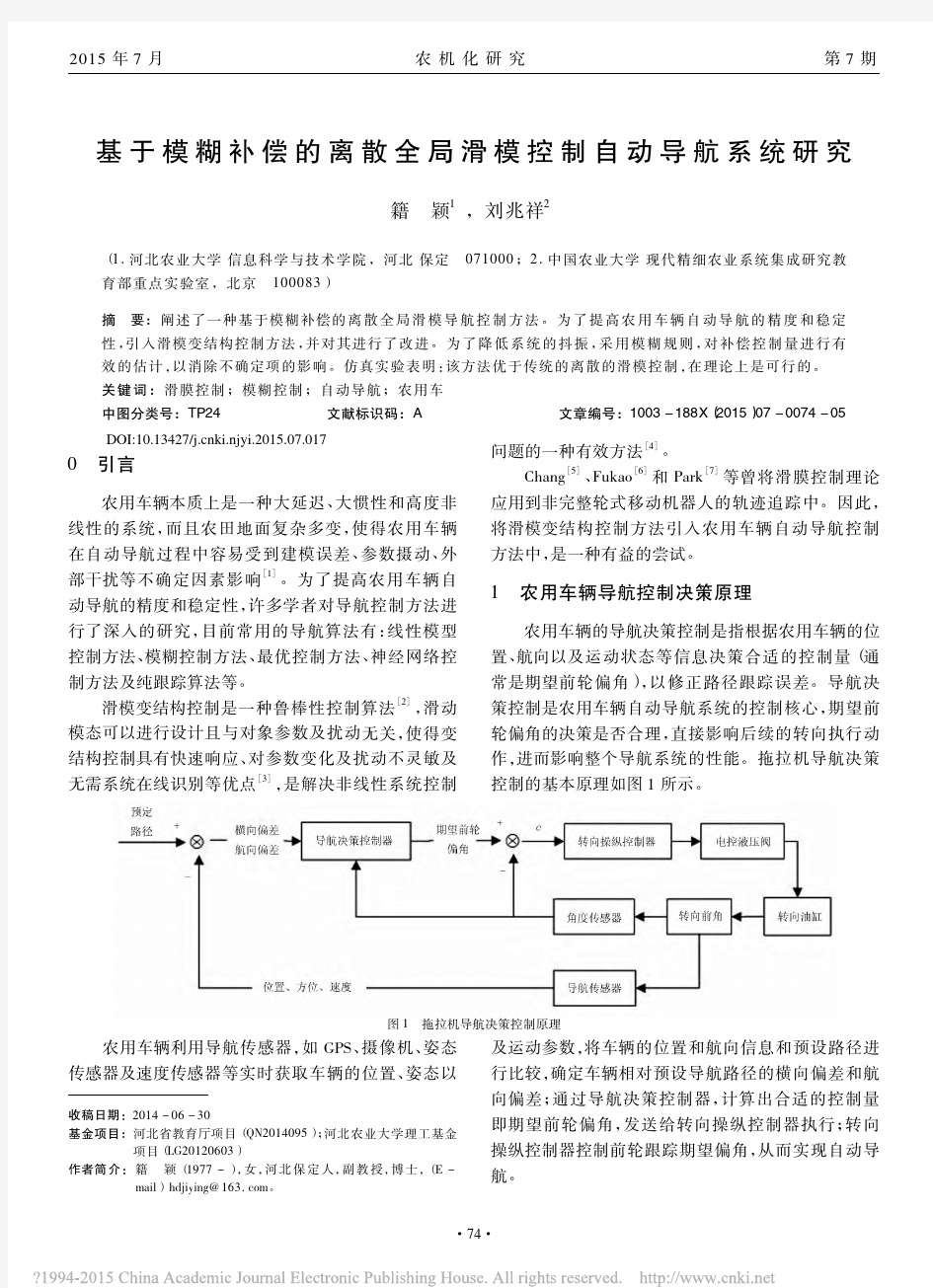
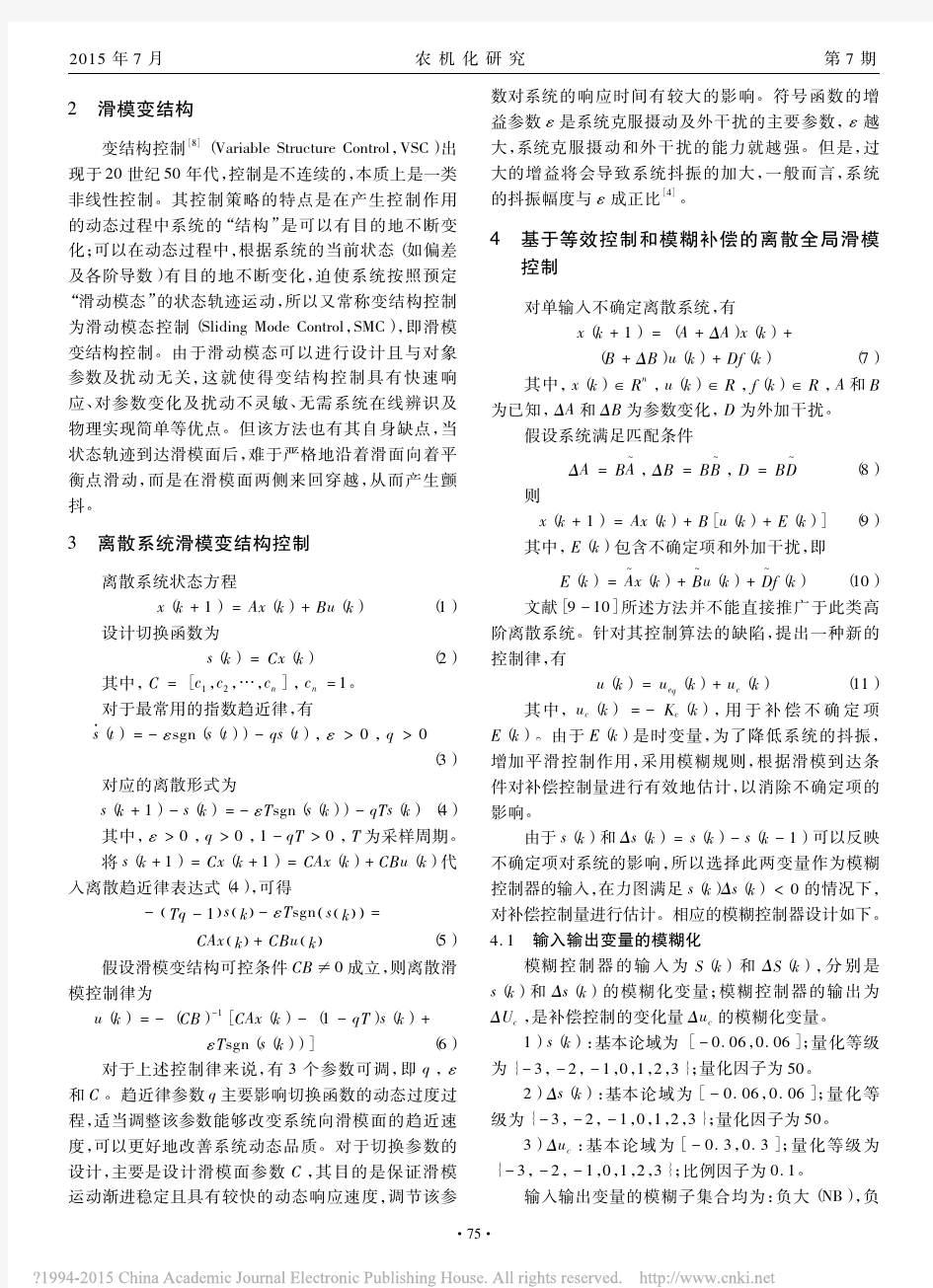
基于模糊补偿的离散全局滑模控制自动导航系统研究
模糊滑模控制算法研究综述
龙源期刊网 https://www.360docs.net/doc/0b6772297.html, 模糊滑模控制算法研究综述 作者:米文鹏蒋奇英郭刚 来源:《读写算·教研版》2014年第14期 摘要:模糊控制及滑模控制作为两种先进的控制方法,有着非常好的优势,但也存在着缺点,结合两者的优点,互补其缺点,从而形成了模糊滑模控制律,本文主要概述研究了模糊控制的一些基本算法。 关键词:模糊控制;滑模控制;复杂系统 中图分类号:G632 文献标识码:B 文章编号:1002-7661(2014)14-094-01 随着控制理论实践的不断深入,被控对象的结构及数学模型也越来越复杂,呈现出时变性、多输入多输出、高度复杂性、非线性、不确定性等特点。面对这些复杂特征,传统的基于精确数学模型的控制理论的局限性日趋明显,于是出现了诸如变结构控制、自适应控制、模糊控制、神经网络控制以及智能控制等新的控制手段。本文就模糊滑模控制的产生及发展现状做简单介绍。 滑模控制因其独特的优势在伺服机构、飞行器控制等领域有着广阔的发展前景。但是,实际系统由于切换装置不可避免地存在惯性,变结构控制在不同的控制逻辑中来回切换,会导致实际滑模运动不是准确地发生在切换面上,容易引起系统的剧烈抖动。这一缺点使其在实际应用中受到了很大的限制。抖动不仅影响控制的精确性,增加能量消耗,而且系统中的高频未建模动态很容易被激发起来,破坏系统性能,甚至使系统产生振荡或失稳,损坏控制器部件。而将模糊控制与滑模变结构控制结合应用来克服变结构控制所带来的抖动便成为很多专家学者的研究重点。 一、常规模糊滑模控制 模糊控制和滑模变结构控制各有优缺点,有某种相似之处,又有互补之处。90年代以后 专家学者把二者结合,构成模糊滑模控制,实现两者之间的取长补短。同时还可在一定程度上削弱或克服滑模变结构控制的抖动现象。目前,模糊控制与滑模变结构控制的结合运用主要有以下三种方式[1]。 1、通过模糊控制规则自适应地调节符号函数项的值,可以在保证趋近速度和减小抖动的前提下较好地选择和。 2、通过模糊控制规则直接确定滑模控制量,即直接把切换函数及其微分作为输入量,通过模糊推理获得滑模控制的控制量。
基于滑模观测器的PMSM模糊滑模控制
万方数据
万方数据
万方数据
万方数据
基于滑模观测器的PMSM模糊滑模控制 作者:王巍, 汪玉凤, 郭凤仪, WANG Wei, WANG Yu-feng, GUO Feng-yi 作者单位:辽宁工程技术大学,辽宁葫芦岛,125105 刊名: 微特电机 英文刊名:SMALL & SPECIAL ELECTRICAL MACHINES 年,卷(期):2010,38(8) 被引用次数:0次 参考文献(11条) 1.Elmas https://www.360docs.net/doc/0b6772297.html,tun O A hybrid controller for the speed control of a permanent magnet synchronous motor drive 2008(1) 2.沈艳霞.纪志成基于无源性永磁同步电机模糊滑模控制系统研究 2007(17) 3.Ilioudis V C.Margaris N I PMSM Sensorless Speed Estimation Based on Sliding Mode Observers 2008 4.赵德宗.张承进.郝兰英一种无速度传感器感应电机鲁棒滑模控制策略 2006(22) 5.Han Y S.Choi J S.Kim Y S Sensorless PMSM Drive with a Sliding Mode Control Based Adaptive Speed and Stator Resistance Estimator 2000(5) 6.王巍.郭凤仪.侯利民滑模控制的PMSM无速度传感器最优转矩控制 2009(3) 7.Cárdenas R.Pe(n~)a R MRAS Observer for Sensorless Control of Standalone Doubly Fed Induction Generators 2005(4) 8.王庆龙.张崇巍.张兴基于变结构模型参考自适应系统的永磁同步电机转速辨识 2008(9) 9.Bianchi N.Bolognani S Advantages of Inset PM Machines for Zero-Speed Sensorless Position Detection 2008(4) 10.秦峰.贺益康.贾洪平基于转子位置自检测复合方法的永磁同步电机无传感器运行研究 2007(3) 11.Jeong Y Initial rotor position estimation of an interior permanent magnet synchronous machine using carrier frequency injection methods 2005(1) 相似文献(10条) 1.期刊论文骆再飞.蒋静坪.曹芳祥.LUO Zai-fei.JIANG Jing-ping.CAO Fan-xiang交流伺服系统的动态模糊滑模 控制策略研究-机电工程2008,25(11) 为提高永磁同步电机(PMSM)交流伺服系统的动静态性能,提出了一种动态模糊滑模控制方法.采用"距离"减少了模糊输入维数和模糊规则,减少控制器的计算量从而加快了响应速度;并利用自适应算法改善了系统性能.仿真试验表明,该方法能明显削弱抖振,提高稳态精度,并具有动态响应速度快的特点以及较强的鲁棒性. 2.期刊论文王洪斌.穆太青.高殿荣基于模糊滑模控制的永磁同步液压电机泵变速控制的研究-武汉理工大学学报 (交通科学与工程版)2010,34(1) 提出一种永磁同步液压电机泵模型,即把永磁同步电机转子作为液压泵缸体,以进一步提高液压传动的整机效率.通过控制电机转速直接调节泵的输出流量,使电机泵提供的功率与负载匹配,从根本上提高液压调速系统的效率.同时建立了该液压电机泵变速控制系统的数学模型.针对永磁同步电机非线性、多变量、强耦合的特点,将模糊和滑模控制理论运用到永磁同步电机直接转矩控制中,以提高系统的鲁棒性和快速性.对转速阶跃变化进行仿真研究,仿真结果表明该策略具有良好的鲁棒性和快速性. 3.期刊论文黄石维.周国荣.HUANG Shi-wei.ZHOU Guo-rong永磁同步电机的模糊滑模控制-机械工程与自动化 2010(1) 为了实现高性能永磁同步电动机伺服系统快速而精确的位置跟踪控制,在滑模控制策略中引入模糊控制算法,设计了基于模糊规则的滑模控制器;并通过理论分析和控制仿真,证实了模糊滑模控制很好地解决了抖振问题,对参数变化和负载扰动具有很好的鲁棒性,永磁同步电机可获得很好的位置跟踪效果. 4.学位论文刘梦溪交流伺服系统的滑模控制研究2008 随着现代化工业的不断发展,交流伺服系统在许多领域的应用日益广泛,对其性能要求也越来越高。由于交流伺服系统本质上具有非线性、多变量、参数时变的性质,因此要实现高品质的控制,对控制策略就提出了很高的要求。本文针对在交流伺服驱动系统中一些尚待解决的的控制问题将一些新的控制方法引入交流伺服系统,力求以新的控制方式和策略提高整个系统的鲁棒性。 滑模控制对系统模型不精确和外部扰动具有较强的鲁棒性,因此获得了广泛应用。但滑模控制的高频抖振现象却成为限制其应用的主要障碍。模糊控制作为利用专家知识和经验的有效方法,特别适用于复杂、非线性、时变的系统,但大多数模糊控制系统缺少保证系统性能的分析方法。将模糊控制
终端滑模控制方法
终端滑模控制方法 1.1终端滑模控制 1.1.1基于终端滑模的非线性系统控制[1] 控制系统设计的主要需求包括两个主要方面:控制(收敛)性能和控制鲁棒性,前者需要实现有限时间收敛控制,后者需要在不适用高增益开关的条件下实现鲁棒控制。 为提高动态系统的收敛性能,Zak提出了终端吸引子(terminal attractor)[2]的概念,并在神经网络学习中表现出较好的性能,其具有如下三次抛物线型式: (0-1) 且平衡点位于原点,对其在初始时刻和平衡时刻间进行积分得到: (0-2) 由此可知,系统(0-1)将在有限时间内收敛到平衡点,收敛时间只取决于系统初始状态。 考虑如下二阶系统 (0-3) 其中为系统状态,为系统输入,跟踪误差,其中为期望轨迹。 设计如下控制律 (0-4) 其中,均为正奇数且。 将上式代入式(0-3)得到如下闭环系统: (0-5) 并设计滑模面如下 (0-6) 其中表示初始条件。那么式(0-5)和(0-6)确保了系统(0-3)在控制律(0-4)下的终端稳定性,定义滑模面为终端滑模子(terminal slider),并定义形如式(0-4)的控制律为终端滑模控制(terminal slider control)。显然,式(0-4)所示的控制比全状态反馈线性化控制性能优越。 结合式(0-6)(0-4)得到如下控制律
(0-7) 那么考虑到控制量有界且误差有界,误差的指数必须为正,即 (0-8) 该条件进一步缩小了参数的设计范围。但是以上分析设计基础是滑模面初始条件,那么对于不同的期望轨迹其初始值不同(也就是说式(0-6)不一定对仍以期望轨迹均能满足),因此需要对滑模控制器的参数进行重新设计。传统滑模利用高增益开关切换来迫使系统从任意初始条件均可收敛到滑模面,文献[]提出建立初始条件和滑模面之间的动态系统来解决传统滑模的缺陷。设计如下滑模控制律 (0-9) 并将其代入系统(0-3)中得到 (0-10) 上式表明对于任意初始条件,滑模变量均将在有限时间收敛到稳态值,之后系统跟踪误差将在滑模面(0-6)上有限时间内到达平衡点。定义式(0-10)所示的滑模面为动态终端滑模子(dynamic terminal slider)。注意传统的滑模面只能保证在任意初始条件下渐进指数收敛,但是通过建立动态终端 滑模面可在不利用高增益开关的条件下,保证对于任意初始条件滑模变量均可在有限时间内收敛到滑模面。 1.1.2终端滑模控制的基本原理[3] 1.1. 2.1未考虑不确定性二阶系统的终端滑模控制 对于如下式(1-1)所示二阶线性或非线性系统(未考虑系统不确定性): (1-1) 其中和为系统状态,和为和的线性或非线性函数,为系统输入。为使得以上系统动态终端收敛(terminal convergence),定义如下一阶终端滑模变量: (1-2) 其中各参数满足如下条件: (1-3)
滑模变结构控制
滑模变结构控制 【原理,优点,意义,步骤,特点】 变结构控制系统的特征是具有一套反馈控制律和一个决策规则,该决策规则就是所谓的切换函数,将其作为输入来衡量当前系统的运动状态,并决定在该瞬间系统所应采取的反馈控制律,结果形成了变结构控制系统。该变结构系统由若干个子系统连接而成,每个子系统有其固定的控制结构且仅在特定的区域内起作用。引进这种变结构特性的优势之一是系统具有每一个结构有用的特性,并可进一步使系统具有单独每个结构都没有的新的特性,这种新的特性即是变结构系统的滑动模态。滑动模态的存在,使得系统在滑动模态下不仅保持对系统结构不确定性、参数不确定性以及外界干扰等不确定性因素的鲁棒性,而且可以获得较为满意的动态性能。迄今为止,变结构控制理论已经历了50年的发展历程,形成了自己的体系,成为自动控制系统中一种一般的设计方法。它适用的控制任务有镇定与运动跟踪等。滑模控制(sliding mode control, SMC)也叫变结构控制,本质上是一类特殊的非线性控制,且非线性表现为控制的不连续性。这种控制策略与其他控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中,根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动。由于滑动模态可以进行设计且与对象参数及扰动无关,这就使
得滑模控制具有快速响应、对应参数变化及扰动不灵敏、无需系统在线辨识、物理实现简单等优点。原理:滑模变结构控制的原理,是根据系统所期望的动态特性来设计系统的切换超平面,通过滑动模态控制器使系统状态从超平面之外向切换超平面收束。系统一旦到达切换超平面,控制作用将保证系统沿切换超平面到达系统原点,这一沿切换超平面向原点滑动的过程称为滑模控制。由于系统的特性和参数只取决于设计的切换超平面而与外界干扰没有关系,所以滑模变结构控制具有很强的鲁棒性。所设计的切换超平面需满足达到条件,即系统在滑模平面后将保持在该平面的条件。现在以N维状态空间模型为例,采用极点配置方法得到M(N Abstract Because of its cost and maintenance advantages, induction motors are widely used nowadays. With the continuous development of digital chip technology, the control system of induction motor increasingly applies microprocessor based hardware system. Therefore, the research of the digital discrete control system becomes particularly important. At the same time, in the motor speed control system, the sensorless vector control method has attracted the attention of researchers widely because of its good dynamic performance and no need for the sensor of detecting speed. Combined with the above situation, further research on vector control based on digital discrete system to improve its performance is of great significance to the modern induction motor speed control system. In this paper, a discrete-time sliding mode control method is proposed for discrete-time systems. Based on the investigation of the reaching phase and quasi-sliding mode, the novel discrete-time sliding mode control strategies are developed to make the systems to satisfy the existence of the sliding mode. The system can move towards the quasi-sliding mode band in finite steps and stay within that band thereafter. The discrete-time sliding mode control can increase the reaching speed to the quasi-sliding mode band and guarantee the robustness to both internal parameter variations and external disturbances. The control strategy is applied for the speed control of induction motors and achieve faster error convergence and higher steady-state accuracy. The specific contents are as follows: By analyzing the discrete Lyapunov stability theorem, the existence condition of discrete sliding mode is obtained. Thereafter, discrete sliding mode control law with variable gain is further developed and its control performance is analyzed. According to the mathematical model of three-phase induction motor, the vector control system of induction motor is designed based on the model after the decoupling. Then, based on the proposed discrete sliding mode control method, a discrete sliding mode speed controller and a current controller are designed through the error systems. Finally, the speed observation is realized by combining the model reference adaptive system and the sliding mode control to realize the motor speed control system without the load speed sensor. Keywords:Sensorless, Induction Motors, Discrete-time System, Discrete slidng mode, MRAS 非奇异终端滑模控制(读书笔记) 王蒙 1、非奇异终端滑模控制特点 非奇异终端滑模控制是近年来出现的一种新型滑模控制方法,它通过有目 的地改变切换函数,直接从滑模设计方面解决了现有终端滑模控制存在的奇异 性问题,实现了系统的全局非奇异控制;同时它又继承了终端滑模的有限时间 收敛特性,与传统的线性滑模控制相比,可令控制系统有限时间内收敛到期望 轨迹,且具有较高的稳态精度,特别适用于高速、高精度控制。 2、线性滑模控制方法 (1)这对不确定二阶非线性系统 122 (,)()()x x x f x t u t d t =? ? =++? 其中,12()[(),()];(,)x t x t x t f x t =为未知函数,表示系统内部扰动,假设其估计值为 1 2?(,)f x t x =,且满足21?(,)(,)(,)0.1f x t f x t F x t x -≤=;()0.1sin()d t t =表示系统外部扰动,且假设()0.1d t D ≤=;系统初始状态120.3,0.5x x ==。 (2)线性滑模通常设计为系统状态的线性组合 12()0s t x x β=+=,其中,0β>。 (3)等效控制律为()()()eq n u t u t u t =+,其中,eq u 为等效控制项,n u 为非线性控制项。(4)下面详细给出控制律的设计过程 ①当系统处于滑动状态时,暂且不考虑系统的参数摄动和外部扰动(()0d t =) 由等效控制原理,如果达到理想的滑动模态,则()0s = x ,即()0s x s x t ??=?=?? x 对滑模s 求时间的一阶导数12222?((,)())0eq s x x x x x f x t u t βββ=+=+=++= ②从而得到等效控制项为21 ?(,)eq u x f x t β =- - 电力系统混沌振荡的等效快速终端模糊滑模控制* 倪骏康?刘崇新?庞霞 (电力设备电气绝缘国家重点实验室,西安710049) (西安交通大学电气工程学院,西安710049) (2013年5月11日收到;2013年6月26日收到修改稿) 电力系统混沌振荡被认为是大型互联电力系统停电事故的主要原因,本文通过相图、李雅普诺夫指数图和时域波形图分析了二阶电力系统混沌振荡的动力学行为,并提出了等效快速终端模糊滑模控制来抑制电力系统混沌振荡,使其恢复到同步运行状态.仿真结果表明,所提出的控制方案不仅具有较快的收敛速度,而且能够柔化控制信号,减少控制能量,并且能有效地降低抖振. 关键词:电力系统混沌振荡,等效滑模控制,模糊滑模控制,快速终端滑模控制 PACS:05.45.Gg,05.45.Ac,05.45.Xt,84.70.+p DOI:10.7498/aps.62.190507 1引言 电力系统是一种典型的强耦合、高度非线性、多变量的动态系统,具有丰富的非线性动力学行为.电力系统发展的必然趋势是大电网互联,大电网的互联为电能的生产和消费带来了巨大便利,同时也为系统带来了稳定性问题.近些年来,美国[1]、中国[2]、巴西[3]和欧洲[4]一些国家的互联电力系统发生大停电事故,给国民经济造成巨大损失.事故分析表明在这些电力系统中曾经发生过无规则的、突发性或阵发性的机电振荡—–混沌振荡,而且通过传统的线性控制器(PSS,LOEC等)难以控制或者抑制这种振荡.因此分析电力系统混沌振荡产生的机理以及研究控制混沌振荡的方法就显得非常必要. 当周期性负荷扰动达到一定幅值时,电力系统就会出现混沌振荡现象.电力系统混沌振荡被认为是电压崩溃、角度失稳的元凶[5,6].近些年来,人们对混沌振荡的机理进行了深入的研究.Jia等[7]研究了电力系统环面分岔、环面折叠分岔和倍周期分岔通向混沌的道路.Yang等[8]运用拓扑马蹄理论,通过计算机计算拓扑熵证明了简单电力系统混沌的存在性.Yu等[9]研究了混沌振荡与电力系统不同失稳模式的关系.Wei等[10]研究了在负荷扰动和有界噪声下电力系统混沌动力学行为.Qin 等[11]的研究表明电力系统在随机相位扰动下会发生混沌振荡现象.Jia等[12]研究了电力系统小信号稳定域与混沌之间的关系,并得出了在研究小信号稳定域及边界问题时不必考虑混沌振荡这一结论. Chiang等[13]通过计算机仿真观察到电力系统在负荷大范围波动下的混沌行为,并通过宽带频谱和Lyapunov指数证明了奇怪吸引子的存在.王宝华等[14]总结了电力系统混沌振荡的机理以及抑制混沌振荡的方法.Chen等[15]利用Melnikov方法和椭圆积分法研究了二阶电力系统混沌振荡的条件. 许多先进的控制方法被应用于电力系统混沌振荡的控制中,典型的控制方法有自适应补偿控制[16]、逆系统控制[17]、最小二乘支持向量机控制[18]、无源控制[19]、ANFIS-based控制[20]、鲁棒控制[21]、自适应Backstepping控制[22]、延时反馈控制[23]、反馈精确线性化控制[24]、基于有限时稳定原理控制[25]和滑模控制[26]等.特别是滑模控 *国家自然科学基金(批准号:51177117)、国家自然科学基金创新研究群体科学基金(批准号:51221005)和高等学校博士学科点专项科研基金(批准号:2010020110023)资助的课题. ?通讯作者.E-mail:max12391@https://www.360docs.net/doc/0b6772297.html, ?通讯作者.E-mail:liucx@https://www.360docs.net/doc/0b6772297.html, c?2013中国物理学会Chinese Physical Society https://www.360docs.net/doc/0b6772297.html, 2009年11月第16卷96期 控制工程 ControlEngineeringofChina Nov.2009 V01.16,No.6 文章编号:1671-7848I2009)06-0659-03 输入受限不确定离散系统的灰色滑模控制 潘海鹏,李建宁,张益波 (浙江理工大学自动化研究所,浙江杭州310018) 摘要:对于输入受限离散系统,首先构造出输入受限务件的等效约束矩阵,然后基于线 性矩阵不等式给出了满足输入受限条件的切换函数时变参数的构造方法。采用离散趋近控制, 结合李雅普诺夫函数和线性矩阵不等式方法提出了滑动模态渐近稳定的充分条件,对不确定 部分建立灰色估计模型,证明了闭环系统的稳定性。理论和仿真表明,不仅利用到基于等效控 制的滑模控制器构造简单、易于实现等优点,而且满足输入受限条件,克服了传统基于等效控 制的滑模控制器瞬时输出量过大的缺点,有效地消除了系统抖振和不确定因素的影响。 关键词:离散系统;滑模控制;输入受限;线性矩阵不等式;灰色模型 中图分类号:TP27文献标识码:A GreySlidingModeControlforUncertainDiscrete SystemswithInputConstraints PANHai?peng,LIJian—ning,ZHANGYi?bo (InstituteofAutomation.ZhejiangSci-TeehUniversity.Hangzhou310018,China) Abstract:TheslidingmodecontrolproblemaclassofUnce/'lhindiscretesystemswithinputconstraintsisdiscussed.AnequivalentITh£l-trixisconstructedforinputconstraints.Thecontrolstrategycombingdiscretequasi—slidingmodecontrolwithdiscreteequivalentcontrolispresented.Asufficientconditionfortheexistenceoftime-varyingslidingsuneace8isgivenintermsofLMIsandLyapunovfunction.Greyestimatemodelisbuiltfortheuncertainpart.TheproposedmethodutilizesthemeritsofslidingmodecontrollerbasedOnequiva-lentcontr01.Thesimulationresultsshowthattheexistencelargeinstantaneousoutputinthetraditionalslidingmodecontrolisovercome.Keywords:discretesystems:slidingmodecontrol;inputconstraints;linearmatrixinequality;greymodel 1引言 20世纪80年代以来,随着计算机技术在控制领域的应用,离散变结构控制理论问题逐渐成为变结构控制领域研究的热点,大量基于离散系统的变结构控制方法也随之出现,目前常用的算法是离散趋近律方法¨引。文献[4]结合预测控制中的模型预测、反馈校正、滚动优化等方法,提出了一种新的离散变结构控制方法。文献[5]针对多输入离散系统设计了滑模控制器。文献[6]设计了满足输入受限条件的线性周期变结构控制器,使任意指数不稳定系统在该类控制器作用下趋于稳定。文献[7]分析了离散终端滑模控制方法的可适用性,讨论了把连续时间终端滑模控制方法离散化所产生的问题。文献[8]针对多输入多输出离散系统,提出了一类自适应滑模变结构控制方法,有效地抑制了系统外部干扰。 由于在实际工程应用中出于安全考虑往往会有状态量、输人量的约束,使传统的变结构控制算法无法应用于工程实践中,本文设计了满足输入受限条件的变结构控制器,利用灰色模型只需少量数据量就可估计不确定部分数值的特点,设计了灰色补偿器,有效地消除了不确定因素和随机干扰的影响,减小了系统的抖振。 2系统描述 考虑如下输入受限不确定离散系统: 工(k+1)=(A+△A)z(k)+Bsat(比。(%)+ /,l,(k))+d(七)(1)式中,,(k)ER“,Ⅳ。(k)∈R”为滑模控制器;n.(%)∈R“为灰色补偿器;A为nX,I维常数矩阵;△A为nXlrt维时变矩阵;B为nXm维常数矩阵;d(矗)ER”为系统外部时变干扰。 设/./(k)=口。(%)+H,(k),定义饱和函数: r“H,ifⅡ。(k)>址H sat(Ⅱ。(k))={“。(||}),if一ⅡL≤“。(专)≤uH(2) l一ⅡL,ifH。(五)<一“L 收稿日期:2008-05.12:收修定稿日期:2008-09-22 基金项目:教爵部高等学校博士学科点专项科研基金资助项目(20070338002) 作者简介:潘海鹏(1965-),男.河南濮阳人,教授,研究生,主要从事非线性控制、智能控制等方面的教学与科研工作。 万方数据 三阶积分终端滑模控制方法 1.1三阶积分终端滑模 1.1.1压电驱动纳米定位平台运动控制问题描述 1.1.1.1纳米定位系统动态建模 考虑磁滞非线性时,压电驱动纳米定位系统的完整动态模型为 (0-1) 其中为时间变量。分别为质量、阻尼系数、刚度和纳米定位平台压电系数,分别为输入电压、纳米定位平台的输出位移、系统的辞职效应、模型不确定性和扰动项。以上动态方程可进一步简化描述如下 (0-2) 其中。本文不直接对磁滞效应进行建模,而是将磁滞非线性影响和其它不确定性统一视为集中扰动,以下省略变量。1.1.1.2扰动估计 基于动态模型(0-2),扰动项可描述如下: (0-3) 但是以上扰动估计方法由于algebraic loop不可实现。以下根据文献[]提出的摄动估计技术进行扰动估计,即 (0-4) 其中为采样时间间隔。那么,式(0-2)所示的动态模型变为 (0-5) 表示扰动估计误差。为助于控制器设计,给出以下合理假设: 假设1:。 1.1.1.3状态估计 由式(0-4)可知,扰动估计器的实现需要计算位置的高阶微分项。但 是,在实际应用中只有位置可测。因此,为实现扰动估计必须设计位置的高阶微分项的估计器或观测器,如Luenberger观测器、高增益观测器和滑模观测器等。然而传统的观测器只能实现状态估计的渐进收敛,而Levant提出的鲁棒精确差分技术(Robust Exact Differentiator, RED)可实现状态估计的有限时间收敛。 特别地,k阶RED可实现k次实时的鲁棒差分,其中2阶RED可设计如下: (0-6) 其中,且。差分器的输出分别为 : (0-7) 定义状态估计误差为 (0-8) 那么,式(0-6)可描述为 (0-9) 其中可在有限时间内实现。 式(0-9)所示的误差动态推导错误,已由文献[]指出,正确推导过程如下:由式(0-6)-(0-8)可知, (0-10) ,因此式(0-9)的正确表达为 (0-11) 利用以上微分器,估计的扰动变为 (0-12) 其中 (0-13) (0-14) 由式(0-11)。此时,如果利用式(0-13)进行扰动估计, 。结合假设1可知,扰动估计误差的变化率有界, 。 第24卷第3期2007年6月 控制理论与应用 Control Theory&Applications V ol.24No.3 Jun.2007滑模变结构控制理论及其算法研究与进展 刘金琨1,孙富春2 (1.北京航空航天大学自动化与电气工程学院,北京100083;2.清华大学智能技术与系统国家重点实验室,北京100084) 摘要:针对近年来滑模变结构控制的发展状况,将滑模变结构控制分为18个研究方向,即滑模控制的消除抖振问题、准滑动模态控制、基于趋近律的滑模控制、离散系统滑模控制、自适应滑模控制、非匹配不确定性系统滑模控制、时滞系统滑模控制、非线性系统滑模控制、Terminal滑模控制、全鲁棒滑模控制、滑模观测器、神经网络滑模控制、模糊滑模控制、动态滑模控制、积分滑模控制和随机系统的滑模控制等.对每个方向的研究状况进行了分析和说明.最后对滑模控制的未来发展作了几点展望. 关键词:滑模控制;鲁棒控制;抖振 中图分类号:TP273文献标识码:A Research and development on theory and algorithms of sliding mode control LIU Jin-kun1,SUN Fu-chun2 (1.School of Automation Science&Electrical Engineering,Beijing University of Aeronautics and Astronautics,Beijing100083,China; 2.State Key Laboratory of Intelligent Technology and Systems,Tsinghua University,Beijing100084,China) Abstract:According to the development of sliding mode control(SMC)in recent years,the SMC domain is character-ized by eighteen directions.These directions are chattering free of SMC,quasi SMC,trending law SMC,discrete SMC, adaptive SMC,SMC for mismatched uncertain systems,SMC for nonlinear systems,time-delay SMC,terminal SMC, global robust SMC,sliding mode observer,neural SMC,fuzzy SMC,dynamic SMC,integral SMC and SMC for stochastic systems,etc.The evolution of each direction is introduced and analyzed.Finally,further research directions are discussed in detail. Key words:sliding mode control;robust control;chattering 文章编号:1000?8152(2007)03?0407?12 1引言(Introduction) 滑模变结构控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,这种控制策略与其它控制的不同之处在于系统的“结构”并不固定,而是可以在动态过程中根据系统当前的状态(如偏差及其各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态轨迹运动.由于滑动模态可以进行设计且与对象参数及扰动无关,这就使得变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线辩识,物理实现简单等优点.该方法的缺点在于当状态轨迹到达滑模面后,难于严格地沿着滑模面向着平衡点滑动,而是在滑模面两侧来回穿越,从而产生颤动. 滑模变结构控制出现于20世纪50年代,经历了50余年的发展,已形成了一个相对独立的研究分支,成为自动控制系统的一种一般的设计方法.以滑模为基础的变结构控制系统理论经历了3个发展阶段.第1阶段为以误差及其导数为状态变量研究单输入单输出线性对象的变结构控制;20世纪60年代末开始了变结构控制理论研究的第2阶段,研究的对象扩大到多输入多输出系统和非线性系统;进入80年代以来,随着计算机、大功率电子切换器件、机器人及电机等技术的迅速发展,变结构控制的理论和应用研究开始进入了一个新的阶段,所研究的对象已涉及到离散系统、分布参数系统、滞后系统、非线性大系统及非完整力学系统等众多复杂系统,同时,自适应控制、神经网络、模糊控制及遗传算法等先进方法也被应用于滑模变结构控制系统的设计中. 2滑模变结构控制理论研究进展(Develop-ment for SMC) 2.1消除滑模变结构控制抖振的方法研 究(Research on chattering elimination of SMC) 2.1.1滑模变结构控制的抖振问题(Problems of SMC chattering) 从理论角度,在一定意义上,由于滑动模态可以 收稿日期:2005?10?19;收修改稿日期:2006?02?23. 基金项目:国家自然科学基金资助项目(60474025,90405017). 第37卷第10期 2014年10月合肥工业大学学报(自然科学版)JOURNALOFHEFEIUNIVERSITYOFTECHNOLOGYVol.37No.10 Oct.2014 收稿日期:2013‐11‐05;修回日期:2014‐01‐07 基金项目:国家自然科学基金资助项目(61100211) 作者简介:杨兴明(1977-),男,云南安宁人,博士,合肥工业大学副教授,硕士生导师.Doi:10.3969/j.issn.1003‐5060.2014.10.008 基于模糊调节的两轮自平衡车的终端滑模分解控制 杨兴明, 段 举, 朱 建, 高银平 (合肥工业大学计算机与信息学院,安徽合肥 230009) 摘 要:文章针对两轮自平衡车的平衡控制问题,提出一种新型滑模控制方法。该方法首先将平衡控制系统分解为摆角子系统和位移子系统,分别设计各子系统的快速终端滑模面,利用一个具有反正切函数形式的中间变量将位移子系统的控制目标嵌入到摆角子系统的控制目标中,从而用1个控制量实现了对2个子系统的有效控制,使其在有限时间内收敛至平衡点;考虑到滑模面系数对系统状态收敛速度的影响,采用模糊推理对系数进行调节,改善了动态响应速度,且从理论上证明了滑模面的稳定性。最后,针对所提出的方法进行仿真,仿真结果验证了该控制方法的有效性。 关键词:两轮自平衡车;分解控制;终端滑模控制;模糊推理 中图分类号:TP273畅5 文献标识码:A 文章编号:1003‐5060(2014)10‐1187‐07 Terminalsliding‐modedecomposedcontroloftwo‐wheeledself‐balancingcartbasedonfuzzytuning YANGXing‐ming, DUANJu, ZHUJian, GAOYin‐ping (SchoolofComputerandInformation,HefeiUniversityofTechnology,Hefei230009,China)Abstract:Inordertosolvetheproblemofbalancecontroloftwo‐wheeledself‐balancingcart,anovelsliding‐modecontrolmethodisproposedinthispaper.Firstly,thebalancecontrolsystemisdecom‐posedintoswinganglesubsystemandpositionsubsystem,andthefastterminalsliding‐modesurfaceisdesignedfortwosubsystemsrespectively.Thenanintermediatevariable,whichhasaformofarct‐angentfunction,isusedtoincorporatethecontroltargetofpositionsubsystemintothecontroltargetofswinganglesubsystem,sothatbothsubsystemscanbeeffectivelycontrolledthroughacontrolac‐tion,andtheyconvergetoequilibriumpointsinfinitetime.Fuzzyreasoningisusedtoadjusttheslid‐ing‐modesurfacecoefficientsinconsiderationoftheirinfluenceontheconvergencerateofsystemstates,whichimprovesthedynamicresponserate.Andthestabilityofthesliding‐modesurfaceistheoreticallyproved.Finally,thesimulationresultsshowthatthecontrolmethodiseffective.Keywords:two‐wheeledself‐balancingcart;decomposedcontrol;terminalsliding‐modecontrol;fuzzyreasoning 欠驱动系统是一类驱动器数目小于系统自由 度数目的系统。两轮自平衡小车则是欠驱动系统 的典型代表,它具有欠驱动、非线性、强耦合、多变 量的特点。它可以在3个自由度上运动,包括摆 杆的旋转,车体的前后运动以及车体的旋转。其 广泛的应用前景引起了国内外学者的关注。由于 非线性系统不能建立精确模型,传统PID、LQR等线性控制方法具有局限性,因而研究人员开始关注智能控制方法的应用,滑模控制、模糊控制、神经网络、迭代学习、遗传算法等控制方法的设计各有特点。其中,滑模控制的特点在于系统的“结构”并不固定,随着当前系统的状态不断变化,按 滑模变结构理论 一、引言 滑模变结构控制本质上是一类特殊的非线性控制,其非线性表现为控制的不连续性,这种控制策略与其它控制的不同之处在于系统的“结 构”并不固定,而是可以在动态过程中根据系统当前的状态(如偏差及其 各阶导数等)有目的地不断变化,迫使系统按照预定“滑动模态”的状态 轨迹运动。由于滑动模态可以进行设计且与对象参数及扰动无关,这就使 得变结构控制具有快速响应、对参数变化及扰动不灵敏、无需系统在线 辩识,物理实现简单等优点。该方法的缺点在于当状态轨迹到达滑模面后,难于严格地沿着滑模面向着平衡点滑动,而是在滑模面两侧来回穿越, 从而产生颤动。滑模变结构控制出现于20世纪50年代,经历了 50余年 的发展,已形成了一个相对独立的研究分支,成为自动控制系统的一种一 般的设计方法。以滑模为基础的变结构控制系统理论经历了 3个发展阶 段.第1阶段为以误差及其导数为状态变量研究单输入单输出线性对象的 变结构控制; 20世纪60年代末开始了变结构控制理论研究的第2阶段, 研究的对象扩大到多输入多输出系统和非线性系统;进入80年代以来, 随着计算机、大功率电子切换器件、机器人及电机等技术的迅速发展, 变 结构控制的理论和应用研究开始进入了一个新的阶段, 所研究的对象已 涉及到离散系统、分布参数系统、滞后系统、非线性大系统及非完整力 学系统等众多复杂系统, 同时,自适应控制、神经网络、模糊控制及遗传 算法等先进方法也被应用于滑模变结构控制系统的设计中。 二、基本原理 带有滑动模态的变结构控制叫做滑模变结构控制(滑模控制)。所谓滑动模态是指系统的状态被限制在某一子流形上运动。通常情况下,系统 的初始状态未必在该子流形上,变结构控制器的作用在于将系统的状态 轨迹于有限时间内趋使到并维持在该子流形上,这个过程称为可达性。系 统的状态轨迹在滑动模态上运动并最终趋于原点,这个过程称为滑模运 动。滑模运动的优点在于,系统对不确定参数和匹配干扰完全不敏感。下 图简要地描述了滑模变结构控制系统的运动过程,其中S(t)为构造的切 换函数(滑模函数), S(t)=0为滑模面。 图1无传感器感应电机调速系统离散滑模控制的研究
非奇异终端滑模
电力系统混沌振荡的等效快速终端模糊滑模控制_倪骏康
输入受限不确定离散系统的灰色滑模控制
三阶积分终端滑模控制方法
滑模变结构控制理论及其算法研究与进展_刘金琨
基于模糊调节的两轮自平衡车的终端滑模分解控制
滑模控制