CCD噪声标定及其在边缘定位中的应用
100光学学报28卷
2CCD成像模型
常用CCD成像公式为
s(x,y)=昭(z,y)I(x,y)+B(x,y)+
D(x,y)+n(x,y),(1)式中s(x,y)为图像(z,y)点的灰度值,B(x,y)为灰度偏置,t为曝光时间,D(x,y)为暗电流,G(x,y)为增益或灵敏系数,I(x,y)为到达CCD的光通量,n(x,y)为随机噪声,包括量化误差、电流噪声等,是一个服从泊松分布的随机变量,可近似认为服从高斯分布。
CCD成像的目的是得到图像点灰度值和被测目标点光强之问的关系,(1)式中tG(x,了)I(x,y)表示的正是这种理想的关系,而其他几项则是CCD的噪声,应该抑制。定义(1)式的中间两项
d(x,y)=B(x,y)+D(x,y),(2)为CCD的暗电流噪声,简称为暗噪声,反映的是没有任何光照到达CCD感光元的情况下CCD的输出,与CCD各感光元(各像素)自身评品质有关。由此,为简化起见将(1)式改写为
s(x,y)一心(z,y)l(x,y)+d(x,3『)+n(x,y).
(3)3噪声标定方法
3.1暗噪声
为了标定CCD的暗噪声,在镜头光圈关闭的情况下采集M幅图像。因为光圈关闭,所以I(x,y)一0,此时CCD的灰度输出值为
毛(z,y)一d(x,y)+n(x,y).(4)将采集的M幅图像平均得到暗噪声
,
M
3(x∽一击》b,y)-
1
M
舭∽+击∑础,y),(5)由(5)式可得到暗噪声估计的误差为
O'd=cTn ̄/1/M,(6)式中靠为随机噪声,z(z,y)的均方差。
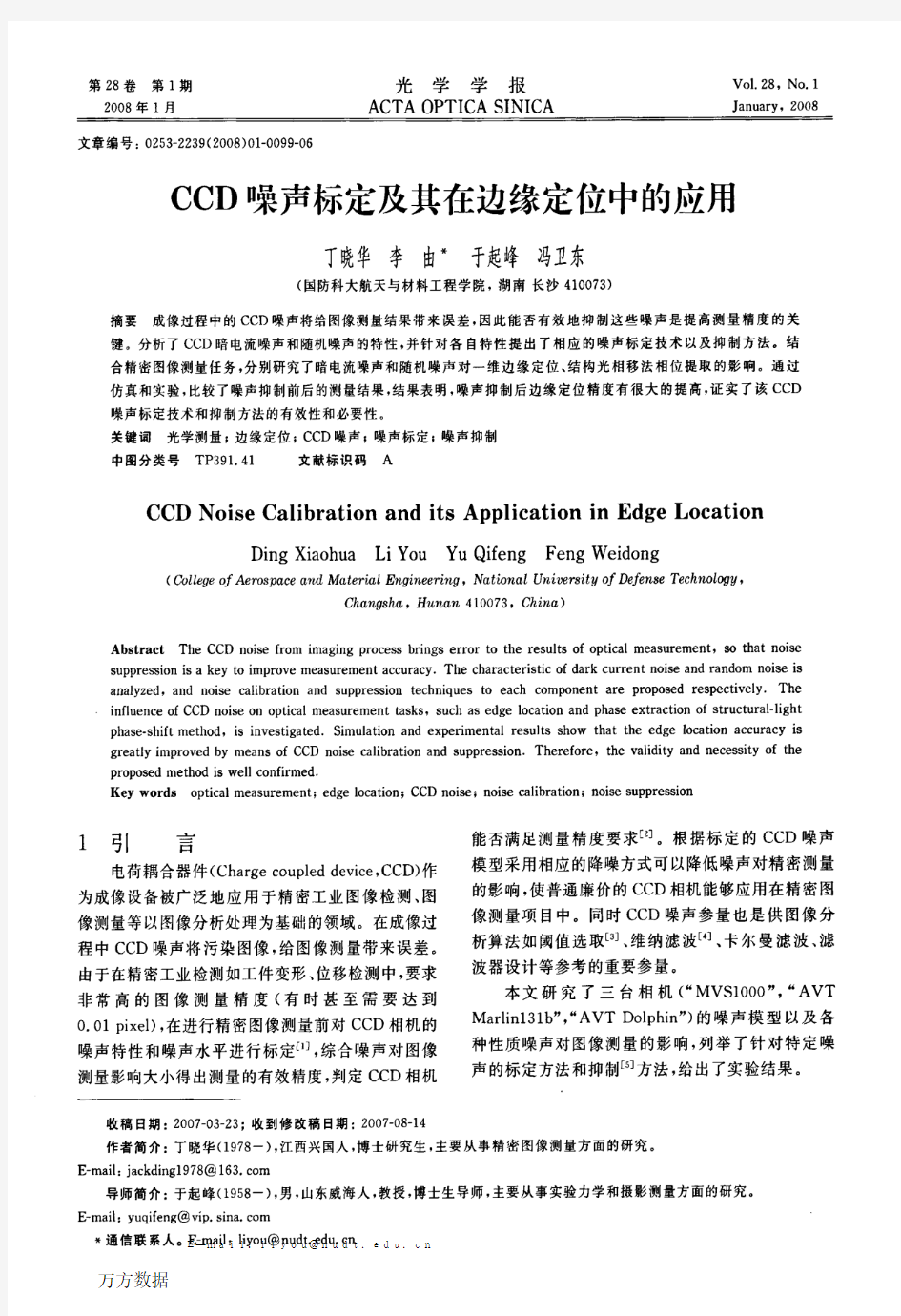
关闭三个相机的镜头光圈,固定曝光时间30his,图像大小1024pixel×768pixel,连续采集20幅8位灰度图像求平均得到的暗噪声估计图(为了显示效果对暗噪声估计图进行了直方图均衡处理)如图1所示(g。。为最大灰度值),除了“MVSl000”相机有个别点噪声超出100外,其余点的噪声均小于20。可以看到,暗噪声在空间位置上分布不均匀,有的地方会出现明暗变化,这也说明不同CCD暗噪声图有较大的差别,这由CCD品质决定。
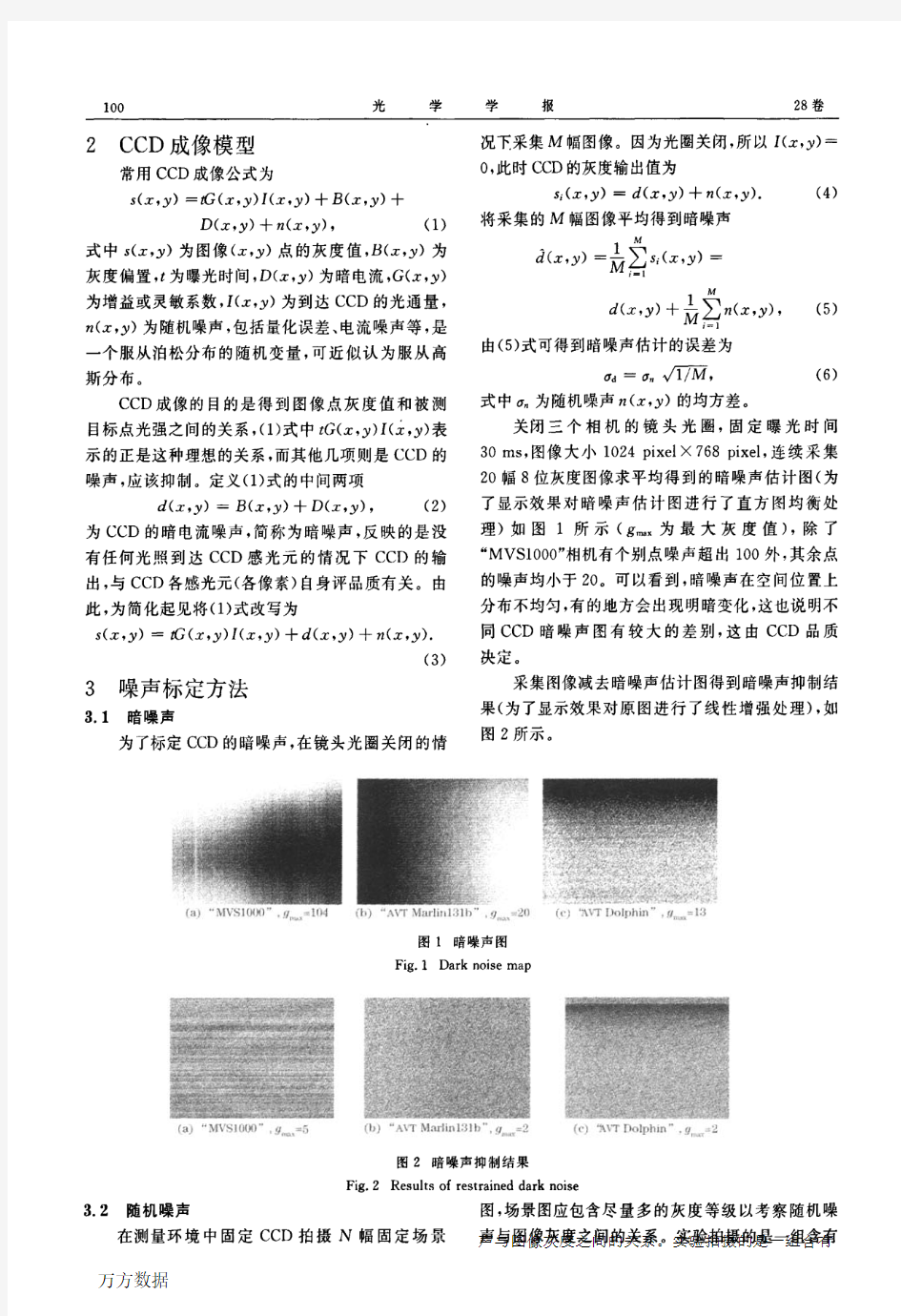
采集图像减去暗噪声估计图得到暗噪声抑制结果(为了显示效果对原图进行了线性增强处理),如图2所示。
图1暗噪声图
Fig.1Darknoisemap
图2暗噪声抑制结果
Fig.2Resultsofrestraineddarknoise
3.2随机噪声
在测量环境中固定CCD拍摄N幅固定场景图,场景图应包含尽量多的灰度等级以考察随机噪
声与图像灰度之间的关系。实验拍摄的是一组含有
1期丁晓华等:CCD噪声标定及其在边缘定位中的应用101不同明暗程度的灰度条。
平均N幅图像得到图像中每个点的灰度均值为
“如y)一志蚤“幽y),(7)对每点计算灰度方差得到图像中每个点的随机噪声均方差估计:
“刎,=压iji蕊㈣每一灰度等级g对应随机噪声均方差为
巩(g)一_1∑民(zi,Yi),(9)
49j=1
式中(zi,Yi)为灰度均值为g的所有像素,%为像素个数。
为了标定相机的随机噪声,分别用三个相机连续拍摄20幅静止场景,场景中包含一组明暗程度不同的灰度条。图3显示了标定结果,每点噪声均方差估计值都乘以30,可以看出随机噪声强度随对应点灰度强度变化。图4显示了三台相机随机噪声随灰度变化的标定结果。
图3均值图像(a)和随机噪声标准差图像(经线性增强处理)(b)
Fig.3Meanimages(a)andstandarddeviationofrandomnoiseimages(1inearlyenhancedfordisplay)(b)
050t00150200250
Grayvalue
图4图像灰度与随机噪声标准差的关系Fig.4Therelationshipbetweengrayvalueandits
standarddeviationofrandomnoise
4噪声抑制
暗噪声是加性时不变的固定偏差,将采集图像减去标定的暗噪声图像即得到抑制暗噪声图像:Sd。,k_f。(z,y)=s(x,.),)一d(x,y).(10)对于静态测量,如工业检测中静止工件的测量,拍摄一组序列图5。,在时间序列上对序列图进行均值滤波:
M
‰岫duc曲。(z,y)一击∑Si(z,y),(11)或者中值滤波:
Snoi。_red。。。|o。(z,了)={si(z,了)),(12)可以有效的降低随机噪声,降噪图像的随机噪声水平可以由(6)式估计。
对于动态测量,被测目标在图像中的位置随时间变化,图像点在时间轴上的相关性减弱,(11)式、(12)式将引起目标边缘处模糊,此时应用时空域运动补偿滤波可以有效地降低噪声,滤波器中阈值根据标定的靠(g)来确定。
5噪声对精密图像测量的影响
精密图像测量根据目标在CCD图像中的理想灰度分布tG(x,y)I(x,了)来精确定位目标点位置,由(3)式可知CCD噪声n(x,y)和d(x,y)会影响目
65432lO
CCD噪声标定及其在边缘定位中的应用
作者:丁晓华, 李由, 于起峰, 冯卫东, Ding Xiaohua, Li You, Yu Qifeng, Feng
Weidong
作者单位:国防科大航天与材料工程学院,湖南,长沙,410073
刊名:
光学学报
英文刊名:ACTA OPTICA SINICA
年,卷(期):2008,28(1)
被引用次数:13次
参考文献(10条)
1.杨勇.王琰蕾.李明高精度数字图像相关测量系统及其技术研究[期刊论文]-光学学报 2006(02)
2.C.Steger Removing the bias from line detection 1997
3.A.M.Borneo.L Salinari.D Sirtori An innovative adaptive noise reduction filter for moving pictures based on modified duncan range test 2000(01)
4.N.Wiener Extrapolation,Interpolation and Smoothing of Stationary Time Series 1949
5.张文涛空间光通信中CCD亚像素的分辨率[期刊论文]-中国激光 2006(06)
6.J.Canny A computational approach tO edge detection[外文期刊] 1986(06)
7.G.Wiora High resolution measurement of phase-shift amplitude and numeric object phase calculation 2000
8.康新.何小元两步相移实现投影栅相位测量轮廓术[期刊论文]-光学学报 2003(01)
9.王立无.苏显渝.周利兵相位测量轮廓术中随机相移误差的校正算法[期刊论文]-光学学报 2004(05)
10.潘伟.赵毅.阮雪榆结构光测量中获取高精度相位的新方法[期刊论文]-光学学报 2004(05)
本文读者也读过(1条)
1.郭伟强.万志.常磊.金龙旭.任建岳.GUO Wei-qiang.WAN Zhi.CHANG Lei.JIN Long-xu.BEN Jian-yue面阵CCD信号采集系统的噪声抑制[期刊论文]-发光学报2008,29(1)
引证文献(13条)
1.杨军伟.胡仲翔.时小军.钱耀川红外CCD在线温度场测量误差分析[期刊论文]-光学学报 2009(5)
2.张芝阳.张来线.刘壶.蔡惠智基于模糊增强的激光大气传输光斑预处理算法[期刊论文]-微计算机应用 2011(5)
3.原玉磊.郑勇.张超Alta U9000相机噪声的测试与分析[期刊论文]-测绘科学 2013(5)
4.高敏.卞正兰.董作人.方祖捷.瞿荣辉脉宽调制技术在CCD光电自准直仪中的应用[期刊论文]-红外与激光工程2010(5)
5.许维星.乔卫东.杨建峰.薛彬.任焕焕空间CCD相机测角精度测量方法研究[期刊论文]-红外技术 2011(2)
6.张晶.王淑荣.李博.黄煜紫外环形临边成像仪的信噪比模拟分析与验证[期刊论文]-光电工程
2013(8)
7.刘力.朱佩平.舒航.张凯X射线衍射增强成像中的定量测量[期刊论文]-光学学报 2008(8)
8.邬寅生.沈庆楼.施建洪具有饱和补偿的碟形飞行器神经滑模控制[期刊论文]-海军航空工程学院学报 2012(3)
9.巩志华.陈敏.王勇.严睿.邰仁忠单色仪转角重复精度的相位板衍射准直方法测量[期刊论文]-光学学报
2009(10)
10.雷亮.陈丽.胡正发.周金运.胡义华基频倍频光波前面的相位控制技术[期刊论文]-中国激光 2009(8)
11.王欣.赵达尊图像噪声对相位变更波前传感的影响研究[期刊论文]-光学学报 2009(8)
12.齐荔荔.万秋华高分辨力面阵图像式光电编码器的测角技术[期刊论文]-仪器仪表学报 2013(1)
13.袁江涛.杨立.王小川.张健.金仁喜基于机器视觉的细水雾液滴尺寸测量与分析[期刊论文]-光学学报 2009(10)本文链接:https://www.360docs.net/doc/0616996821.html,/Periodical_gxxb200801018.aspx
经典图像边缘检测
经典图像边缘检测(微分法思想)——Sobel算子 2008-05-15 15:29Sobel于1970年提出了Sobel算子,与Prewitt算子相比较,Sobel算子对检测点的上下左右进一步加权。其加权模板如下: 经典图像边缘检测(微分法思想)——Roberts交叉算子 2008-05-14 17:16 如果我们沿如下图方向角度求其交叉方向的偏导数,则得到Roberts于1963年提出的交叉算子边缘检测方法。该方法最大优点是计算量小,速度快。但该方法由于是采用偶数模板,如下图所示,所求的(x,y)点处梯度幅度值,其实是图中交叉点处的值,从而导致在图像(x,y)点所求的梯度幅度值偏移了半个像素(见下图)。
上述偶数模板使得提取的点(x,y)梯度幅度值有半个像素的错位。为了解决这个定位偏移问题,目前一般是采用奇数模板。 奇数模板: 在图像处理中,一般都是取奇数模板来求其梯度幅度值,即:以某一点(x,y)为中心,取其两边相邻点来构建导数的近似公式:
这样就保证了在图像空间点(x,y)所求的梯度幅度值定位在梯度幅度值空间对应的(x,y)点上(如下图所示)。 前面我们讲过,判断某一点的梯度幅度值是否是边缘点,需要判断它是否大于设定的阈值。所以,只要我们设定阈值时考虑到加权系数产生的影响便可解决,偏导数值的倍数不是一个问题。 经典图像边缘检测(微分法思想)——Prewitt算子 2008-05-15 11:29 Prewitt算子 在一个较大区域中,用两点的偏导数值来求梯度幅度值,受噪声干扰很大。若对两个点的各自一定领域内的灰度值求和,并根据两个灰度值和的差来计算x,y的偏导数,则会在很
图像增强和边缘检测实验报告
图像增强和边缘检测 实验内容 1)将Image1.jpg 转换为灰度图像A。 2)读懂文档(图像直方图均衡化.doc),利用里面的方法通过编程对图像A进行直方图均衡化处理,得到处理后的图像B。显示图像A和B,以及各自对应的灰度直方图。 3)利用锐化方法(教材118-120页),编制程序,对图像A和B分别使用罗伯特梯度,索伯尔梯度,拉普拉斯方法,进行处理,比较哪种求边缘的方法好,以及进行图像的直方图均衡化后能否提高求边缘的精确度。 4)撰写报告书,说明实验的步骤和方法,实验的结果等。 5)提交报告书以及源程序 实验步骤和方法 1)调用rgb2gray()函数将Image1.jpg 转换为灰度图像A。并将图像A保存到f和I1中。2)统计图像A中的像素并进行均衡化处理并将结果保存到B,显示图像A和B;调用imhist()函数显示两图像的灰度直方图。 3)编制罗伯特锐化函数,设定两个模板t1=[1,0;0,-1] t2=[0,-1;1,0],调用conv2()函数获得图像和两个模板的卷积并取绝对值相加获得罗伯特锐化结果,缩小结果图像。4)编制索伯尔锐化函数,设定两个模板t1=[1,2,1;0,0,0;-1,-2,-1] t2=[-1,0,1;-2,0,2;-1,0,1] ,其余步骤与罗伯特锐化相似。 5)编制拉普拉斯锐化函数,设定模板t(m,n)=[0,1,0;1,-4,1;0,1,0],将待处理图像与模板卷积,并用原图像的至减去模板运算结果的整数倍,将结果缩小化到原图像大小既得拉普拉斯锐化结果。 6)函数整合,将编制好的3)、4)、5)三个函数整合到2)的程序后面并加以调整,分别对图像A和B进行锐化,并将结果输出到2*4的图框中进行对比 实验结果 1)
系统实验(DSP)--图像的锐化处理、图像的边缘检测
DSP 实验报告 一、 图像的锐化处理(高通滤波处理) 1、 实验原理 处理模板如下: ???? ??????--+--=004100 ααα ααM 25.0=α 对应数学表达式: ()[])1,(),1()1,(),1(),(41),(++++-+--+=y x f y x f y x f y x f y x f y x g αα 2、 C 程序及运行结果 程序: Acute_RGB_Image(int *buffer) { int x,y; for (y=0;y
运行结果: 锐化前锐化后 分析:从上面两幅图可以看出锐化后的图像轮廓变得明显,且噪声变得强烈。 3、汇编程序及运行结果 程序: ImageAcuteSub(ImageWidth,ImageHeight,buffer_red); ImageAcuteSub(ImageWidth,ImageHeight,buffer_green); ImageAcuteSub(ImageWidth,ImageHeight,buffer_blue); .mmregs .def _ImageAcuteSub .text _ImageAcuteSub: mov t0,brc1 ;IMAGE WIDTH mov t1,brc0 ;IMAGE HEIGHT rptb y_loop rptb x_loop mov *ar0(#1),ac1;f(x+1,y) add *ar0(#-1),ac1 ;f(x-1,y) add *ar0(#-250),ac1 ;f(x,y-1) add *ar0(#250),ac1 ;f(x,y+1) sfts ac1,#-2 mov *ar0<<#1,ac0;2f(x,y)
图像边缘检测算法体验步骤
图像边缘检测算法体验步骤 图像边缘检测算法体验步骤(Photoshop,Matlab)1. 确定你的电脑上已经安装了Photoshop和Matlab2. 使用手机或其他任何方式,获得一张彩色图像(任何格式),建议图像颜色丰富,分辨率比较高,具有比较明显的图像边界(卡通图像,风景图像,桌面图像)3. 将图像保存到一个能够找到的目录中,例如img文件夹(路径上没有汉字)4. 启动Photoshop,打开img文件夹中的图像5. 在工具箱中选择“矩形选择”工具,到图面上选择一个区域(如果分辨率比较高,建议不要太大,否则计算过程比较长)6. 点击下拉菜单【文件】-【新建】,新建一个与矩形选择框同样尺寸的Photoshop图像,不要求保存该图像7. 将该彩色图像转换为亮度图像,即点击下拉菜单【图像】-【模式】-【灰度】,如提示是否合并,选择“Yes”8. 将该单色的亮度图像另存为Windows的BMP文件,点击下拉菜单【文件】-【存储为】,在“存储为”窗口中,为该文件起一个名字,例如test1(保存为test1.bmp)9. 启动Matlab,将当期路径(Current Directory)定位到图像文件夹,例如这里的img文件夹10. 使用imread命令读入该图像,在命令行输入:>> f = imread(test1.bmp);11. 在Matlab中显示该图像,在命令行输入:>> figure, imshow(f)12. 然后,分别使用Matlab图像工具箱中的Edge函数,分别使用Sobel算法,高斯-拉普拉斯(Log)算法和Canny算法得到的边缘图像:在命令行输入:>> g_sobel = edge(f, sobel, 0.05); >> g_log = edge(f, log, 0.003, 2.25); >> g_canny = edge(f, canny, [0.04 0.10], 1.5);13 得到边缘图像计算结果后,显示这些边缘图像: >> figure, imshow(g_sobel) >> figure, imshow(g_log) >> figure, imshow(g_canny)14 可以用不同的图像做对比,后续课程解释算法后,可以变换不同的阈值,得到不同的边缘图像
数字图像处理中的边缘检测技术
课程设计报告 设计题目:数字图像处理中的边缘检测技术学院: 专业: 班级:学号: 学生姓名: 电子邮件: 时间:年月 成绩: 指导教师:
数字图像处理中的边缘检测技术课程设计报告I 目录 1 前言:查阅相关文献资料,了解和掌握基本原理、方法和研究现状,以及实际应用的背景意义 (1) 1.1理论背景 (1) 1.2图像边缘检测技术研究的目的和意义 (1) 1.3国内外研究现状分析 (2) 1.4常用边缘检测方法的基本原理 (3) 2 小波变换和小波包的边缘检测、基于数学形态学的边缘检测法算法原理 (7) 2.1 小波边缘检测的原理 (7) 2.2 数学形态学的边缘检测方法的原理 (7) 3 算法实现部分:程序设计的流程图及其描述 (9) 3.1 小波变换的多尺度边缘检测程序设计算法流程图 (9) 3.2 数学形态学的边缘检测方法程序设计算法描述 (10) 4实验部分:对所给的原始图像进行对比实验,给出相应的实验数据和处理结果 (11) 5分析及结论:对实验结果进行分析比较,最后得出相应的结论 (15) 参考文献 (17) 附录:代码 (18)
1前言 查阅相关文献资料,了解和掌握基本原理、方法和研究现状,以及实际应用的背景意义 1.1 理论背景 图像处理就是对图像信息加工以满足人的视觉心理或应用需求的方法。图像处理方法有光学方法和电子学方法。从20世纪60年代起随着电子计算机和计算技术的不断提高和普及,数字图像处理进入了高速发展时期,而数字图像处理就是利用数字计算机或其它的硬件设备对图像信息转换而得到的电信号进行某些数学处理以提高图像的实用性。 图像处理在遥感技术,医学领域,安全领域,工业生产中有着广泛的应用,其中在医学应用中的超声、核磁共振和CT等技术,安全领域的模式识别技术,工业中的无损检测技术尤其引人注目。 计算机进行图像处理一般有两个目的:(1)产生更适合人观察和识别的图像。 (2)希望能由计算机自动识别和理解图像。数字图像的边缘检测是图像分割、目标区域的识别、区域形状提取等图像分析领域的重要基础,图像处理和分析的第一步往往就是边缘检测。 物体的边缘是以图像的局部特征不连续的形式出现的,也就是指图像局部亮度变化最显著的部分,例如灰度值的突变、颜色的突变、纹理结构的突变等,同时物体的边缘也是不同区域的分界处。图像边缘有方向和幅度两个特性,通常沿边缘的走向灰度变化平缓,垂直于边缘走向的像素灰度变化剧烈。根据灰度变化的特点,图像边缘可分为阶跃型、房顶型和凸缘型。 1.2 图像边缘检测技术研究的目的和意义 数字图像处理是伴随着计算机发展起来的一门新兴学科,随着计算机硬件、软件的高度发展,数字图像处理也在生活中的各个领域得到了广泛的应用。边缘检测技术是图像处理和计算机视觉等领域最基本的技术,如何快速、精确的提取图像边缘信息一直是国内外研究的热点,然而边缘检测也是图像处理中的一个难题。 首先要研究图像边缘检测,就要先研究图像去噪和图像锐化。前者是为了得到飞更真实的图像,排除外界的干扰,后者则是为我们的边缘检测提供图像特征更加明显的图片,即加大图像特征。两者虽然在图像处理中都有重要地位,但本次研究主要是针对图像边缘检测的研究,我们最终所要达到的目的是为了处理速
实验三图像分割与边缘检测
数字图像处理实验报告 学生姓名王真颖 学生学号L0902150101 指导教师梁毅雄 专业班级计算机科学与技术1501 完成日期2017年11月06日
计算机科学与技术系信息科学与工程学院
目录 实验一.................................................................................................. 错误!未定义书签。 一、实验目的.................................................................................................... 错误!未定义书签。 二、实验基本原理 ........................................................................................... 错误!未定义书签。 三、实验内容与要求....................................................................................... 错误!未定义书签。 四、实验结果与分析....................................................................................... 错误!未定义书签。实验总结............................................................................................... 错误!未定义书签。参考资料.. (3) 实验一图像分割与边缘检测 一.实验目的 1. 理解图像分割的基本概念; 2. 理解图像边缘提取的基本概念; 3. 掌握进行边缘提取的基本方法;
图像边缘检测算子
课程设计任务书 学院信息科学与工程专业电子信息工程 学生姓名*** 班级学号09******* 课程设计题目图像边缘检测算子 课程设计目的与要求: 设计目的: 1.熟悉几种经典图像边缘检测算子的基本原理。 2.用Matlab编程实现边缘检测,比较不同边缘检测算子的实验结果。设计要求: 1.上述实验内容相应程序清单,并加上相应的注释。 2.完成目的内容相应图像,并提交原始图像。 3.用理论对实验内容进行分析。 工作计划与进度安排: 2012年 06月29 日选题目查阅资料 2012年 06月30 日编写软件源程序或建立仿真模块图 2012年 07月01 日调试程序或仿真模型 2012年 07月01 日结果分析及验收 2012年 07月02 日撰写课程设计报告、答辩 指导教师: 2012年 6月29日专业负责人: 2012年 6月29日 学院教学副院长: 2012年 6月29日
摘要 边缘检测是数字图像处理中的一项重要内容。本文对图像边缘检测的几种经典算法(Roberts算子、Sobel算子、Prewitt算子)进行了分析和比较,并用MATLAB实现这几个算法。最后通过实例图像对不同边缘检测算法的效果进行分析,比较了不同算法的特点和适用范围。 关键词:图像处理;边缘检测;Roberts算子;Sobel算子;Prewitt算子
目录 第1章相关知识.................................................................................................... IV 1.1 理论背景 (1) 1.2 数字图像边缘检测意义 (1) 第2章课程设计分析 (3) 2.1 Roberts(罗伯特)边缘检测算子 (3) 2.2 Prewitt(普瑞维特)边缘检测算子 (4) 2.3 Sobel(索贝尔)边缘检测算子 (5) 第3章仿真及结果分析 (7) 3.1 仿真 (7) 3.2 结果分析 (8) 结论 (10) 参考文献 (11)
图像边缘检测方法的研究与实现刘法200832800066
图像边缘检测方法的研究与实现刘法200832800066
青岛大学专业课程设计 院系: 自动化学院 专业: 电子信息工程 班级: 08级电子信息工程3班学生姓名: 刘法 指导教师: 王汉萍庄晓东 日期: 2011年12月23日
题目:图像边缘检测方法的研究与实现 一、边缘检测以及相关概念 1.1边缘,边缘检测的介绍 边缘(edge)是指图像局部强度变化最显著的部分.边缘主要存在于目标与目标、目标与背景、区域与区域(包括不同色彩)之间,是图像分割、纹理特征和形状特征等图像分析的重要基础.图像分析和理解的第一步常常是边缘检测(edge detection). 边缘检测是指使用数学方法提取图像像元中具有亮度值(灰度)空间方向梯度大的边、线特征的过程。 在讨论边缘算子之前,首先给出一些术语的定义: 边缘点:图像中具有坐标] ,[j i且处在强度显著变化的位置上的点.边缘段:对应于边缘点坐标] i及其方位 ,边缘的方位可能是梯度角. ,[j 边缘检测器:从图像中抽取边缘(边缘点和边缘段)集合的算法. 轮廓:边缘列表,或是一条表示边缘列表的拟合曲线. 边缘连接:从无序边缘表形成有序边缘表的过程.习惯上边缘的表示采用顺时针方向序. 边缘跟踪:一个用来确定轮廊的图像(指滤波后的图像)搜索过程. 边缘点的坐标可以是边缘位置像素点的行、列整数标号,也可以在子像素分辨率水平上表示.边缘坐标可以在原始图像坐标系上表示,但大多数情况下是在边缘检测滤波器的输出图像的坐标系上表示,因为滤波过程可能导致图像坐标平移或缩放.边缘段可以用像素点尺寸大小的小线段定义,或用具有方位属性的一个点定义.请注意,在实际中,边缘点和边缘段都被称为边缘.边缘连接和边缘跟踪之间的区别在于:边缘连接是把边缘检测器产生的无序边缘集作为输入,输出一个有序边缘集;边缘跟踪则是将一幅图像作为输入,输出一个有序边缘集.另外,边缘检测使用局部信息来决定边缘,而边缘跟踪使用整个图像信息来决定一个像素点是不是边缘. 1.2 边缘检测算子 边缘检测是图像特征提取的重要技术之一, 边缘常常意味着一个区域的终结和另一个区域的开始. 图像的边缘包含了物体形状的重要信息,它不仅在分析图像时大幅度地减少了要处理的信息量,而且还保护了目标的边界结构. 因此,边缘检测可以看做是处理许多复杂问题的关键. 边缘检测的实质是采用某种算法来提取出图像中对对象与背景间的交界线。图像灰度的变化情况可以用图像灰度分布的梯度来反映,因此可以用局部图像微分技术来获取边缘检测算子。经典的边缘检测方法是对原始图像中的像素的某个邻域来构造边缘检测算子。以下是对几种经典的边缘检测算子进行理论分析,并对各自的性能特点做出比较和评价。 边缘检测的原理是:由于微分算子具有突出灰度变化的作用,对图像进行微分运算,在图像边缘处其灰度变化较大,故该处微分计算值教高,可将这些微分值作为相应点的边缘强度,通过阈值判别来提取边缘点,即如果微分值大于阈值,则为边缘点。
数字图像处理_边缘检测算子与锐化算子(含MATLAB代码)
数字图像处理实验五 15生医 一、实验内容 对某一灰度图像,进行如下处理: (1)分别用Roberts、Prewitt和Sobel边缘检测算子进行边缘检测;(2)将Roberts、Prewitt和Sobel边缘检测算子修改为锐化算子,对原图像进行锐化,同屏显示原图像、边缘检测结果和锐化后图像,说明三者之间的关系。一灰度图像的二值化。 二、运行环境 MATLAB R2014a 三、运行结果及分析 运行结果如图所示:可以观察出原图像、边缘检测结果和锐化后图像三者之间的关系为:原图像+边缘检测结果=锐化后图像 四、心得体会 通过MATLAB编程更加熟悉了课本上关于锐化与边缘检测的相关知识
点,对二者的关系也有了具体的认识。同时,对MATLAB图像导入函数、图像边缘检测函数、锐化窗口矩阵卷积函数的调用及实现机理也有所掌握,比如后边附的程序中会提到的“%”标注的思考。 五、具体程序 size=512; Img_rgb=imread('E:\lena.jpg'); %读取图像 Img_gray=rgb2gray(Img_rgb); %进行RGB到灰度图像的转换(虽然原来在网上下载的lena就是黑白图像,但是这一步必须要有!否则处理结果不正确) figure(1); subplot(2,3,1); imshow(Img_gray); title('原图像'); Img_edge=zeros(size); a={'roberts','prewitt','sobel'}; for i=1:3 Img_edge=edge(Img_gray,a{i}); figure(1); subplot(2,3,i+1); imshow(Img_edge); axis image; title(a(i)); end A=imread('E:\lena.jpg'); B=rgb2gray(A); B=double(B); Window=[-1 -1 -1;-1 9 -1;-1 -1 -1]; %八邻域拉普拉斯锐化算子(α取1) C=conv2(B,Window,'same'); Img_sharp=uint8(C); subplot(2,3,5); imshow(Img_sharp); title('sharp');
Matlab做图像边缘检测的多种方法
Matlab做图像边缘检测的多种方法 1、用Prewitt算子检测图像的边缘 I = imread('bacteria.BMP'); BW1 = edge(I,'prewitt',0.04); % 0.04为梯度阈值 figure(1); imshow(I); figure(2); imshow(BW1); 2、用不同σ值的LoG算子检测图像的边缘 I = imread('bacteria.BMP'); BW1 = edge(I,'log',0.003); % σ=2 imshow(BW1);title('σ=2') BW1 = edge(I,'log',0.003,3); % σ=3 figure, imshow(BW1);title('σ=3') 3、用Canny算子检测图像的边缘 I = imread('bacteria.BMP'); imshow(I); BW1 = edge(I,'canny',0.2); figure,imshow(BW1); 4、图像的阈值分割 I=imread('blood1.tif'); imhist(I); % 观察灰度直方图,灰度140处有谷,确定阈值T=140 I1=im2bw(I,140/255); % im2bw函数需要将灰度值转换到[0,1]范围内 figure,imshow(I1); 5、用水线阈值法分割图像 afm = imread('afmsurf.tif');figure, imshow(afm); se = strel('disk', 15); Itop = imtophat(afm, se); % 高帽变换 Ibot = imbothat(afm, se); % 低帽变换 figure, imshow(Itop, []); % 高帽变换,体现原始图像的灰度峰值 figure, imshow(Ibot, []); % 低帽变换,体现原始图像的灰度谷值 Ienhance = imsubtract(imadd(Itop, afm), Ibot);% 高帽图像与低帽图像相减,增强图像figure, imshow(Ienhance); Iec = imcomplement(Ienhance); % 进一步增强图像
数字图像边缘检测的研究与实现
任务书
主要分析几种应用于数字图像处理中的边缘检测算子,根据它们在实践中的应用结果进行研究,主要包括:Robert 边缘算子、Prewitt 边缘算子、Sobel 边缘算子、Kirsch 边缘算子以及Laplacian 算子等对图像及噪声图像的边缘检测,根据实验处理结果讨论了几种检测方法的优劣. 关键词:数字图像处理;边缘检测;算子
图像的边缘是图像的重要特征之一, 数字图像的边缘检测是图像分割、目标区域识别、区域形状提取等图像分析领域十分重要的基础, 其目的是精确定位边缘, 同时较好地抑制噪声, 因此边缘检测是机器视觉系统中必不可少的重要环节。然而, 由于实际图像中的边缘是多种边缘类型的组合, 再加上外界环境噪声的干扰, 边缘检测又是数字图像处理中的一个难题。
目录 第一章边缘的概念 (3) 第二章边缘检测 (4) 第三章边缘检测算子的应用 (8) 第四章边缘检测方法性能比较 (12) 参考文献料 (15)
第1章:边缘检测 1.1 边缘的介绍 图像边缘是图像最基本的特征,边缘在图像分析中起着重要的作用。所谓边缘是指图像局部特性的不连续性。灰度或结构等信息的突变处称为边缘,例如:灰度级的突变,颜色的突变,纹理结构的突变等。边缘是一个区域的结束,也是另一个区域的开始,利用该特征可以分割图像。 边缘(edge)是指图像局部强度变化最显著的部分.边缘主要存在于目标与目标、目标与背景、区域与区域(包括不同色彩)之间,是图像分割、纹理特征和形状特征等图像分析的重要基础.图像分析和理解的第一步常常是边缘检测(edge detection).由于边缘检测十分重要,因此成为机器视觉研究领域最活跃的课题之一.本章主要讨论边缘检测和定位的基本概念,并使用几种常用的边缘检测器来说明边缘检测的基本问题. 在讨论边缘算子之前,首先给出一些术语的定义: 边缘点:图像中具有坐标],[j i 且处在强度显著变化的位置上的点. 边缘段:对应于边缘点坐标],[j i 及其方位 ,边缘的方位可能是梯度角. 边缘检测器:从图像中抽取边缘(边缘点和边缘段)集合的算法. 轮廓:边缘列表,或是一条表示边缘列表的拟合曲线. 边缘连接:从无序边缘表形成有序边缘表的过程.习惯上边缘的表示采用顺时针方向序. 边缘跟踪:一个用来确定轮廊的图像(指滤波后的图像)搜索过程. 边缘点的坐标可以是边缘位置像素点的行、列整数标号,也可以在子像素分辨率水平上表示.边缘坐标可以在原始图像坐标系上表示,但大多数情况下是在边缘检测滤波器的输出图像的坐标系上表示,因为滤波过程可能导致图像坐标平移或缩放.边缘段可以用像素点尺寸大小的小线段定义,或用具有方位属性的一个点定义.请注意,在实际中,边缘点和边缘段都被称为边缘. 边缘连接和边缘跟踪之间的区别在于:边缘连接是把边缘检测器产生的无序边缘集作为输入,输出一个有序边缘集;边缘跟踪则是将一幅图像作为输入,输出一个有序边缘集.另外,边缘检测使用局部信息来决定边缘,而边缘跟踪使用整个图像信息来决定一个像素点是不是边缘. 1.2 边缘检测算子 边缘检测是图像特征提取的重要技术之一, 边缘常常意味着一个区域的终结和另一个区域的开始. 图像的边缘包含了物体形状的重要信息,它不仅在分析图像时大幅度地减少了要处理的信息量,而且还保护了目标的边界结构. 因此,边缘检测可以看做是处理许多复杂问题的关键. 边缘检测的实质是采用某种算法来提取出图像中对对象与背景间的交界线。图像灰度的变化情况可以用图像灰度分布的梯度来反映,因此可以用局部图像微分技术来获取边缘检测算子。经典的 边缘检测方法是对原始图像中的像素的某个邻域来构造边缘检测算子。以下是对几种经典的边缘检测算子进行理论分析,并对各自的性能特点做出比较和评价。
图像边缘检测技术综述
第 42 卷增刊 1 中南大学学报(自然科学版) V ol.42 Suppl. 1 2011 年 9 月 Journal of Central South University (Science and Technology) Sep. 2011 图像边缘检测技术综述 王敏杰 1 ,杨唐文 1, 3 ,韩建达 2 ,秦勇 3 (1. 北京交通大学 信息科学研究所,北京,100044; 2. 中国科学院沈阳自动化研究所 机器人学国家重点实验室,辽宁 沈阳,110016; 3. 北京交通大学 轨道交通控制与安全国家重点实验室,北京,100044) 摘要:边缘检测是图像处理与分析中最基础的内容之一。首先介绍了几种经典的边缘检测方法,并对其性能进行 比较分析;然后,综述了近几年来出现的一些新的边缘检测方法;最后,对边缘检测技术的发展趋势进行了展望。 关键词:数字图像;边缘检测;综述 中图分类号:TP391.4 文献标志码:A 文章编号:1672?7207(2011)S1?0811?06 Review on image edge detection technologies W ANG Min-jie 1 , Y ANG Tang-wen 1,3 , HAN Jian-da 2 ,QIN Y ong 3 (1.Institute of Information Science,Beijing Jiaotong University, Beijing 100044, China? 2.State Key Laboratory of Robotics, Shenyang Institute of Automation, Chinese Academic of Science,Shenyang 110016, China? 3.State Key Laboratory of Rail Traffic Control and Safety, Beijing Jiaotong University, Beijing 100044, China) Abstract: Edge detection is one of the most fundamental topics in the research area of image processing and analysis. First, several classical edge detection methods were introduced, and the performance of these methods was compared? then, several edge detection methods developed in the latest years were reviewed? finally, the trend of the research of the image edge detection in the future was discussed. Key words:digital image?edge detection?review 图像是人们从客观世界获取信息的重要来源 [1?2] 。 图像信息最主要来自其边缘和轮廓。所谓边缘是指其 周围像素灰度急剧变化的那些象素的集合,它是图像 最基本的特征。边缘存在于目标、背景和区域之 间 [3?4] ,它是图像分割所依赖的最重要的依据。边缘检 测 [5?8] 是图像处理和计算机视觉中的基本问题, 图像边 缘检测是图像处理中的一个重要内容和步骤,是图像 分割、目标识别等众多图像处理的必要基础 [9?10] 。因 此,研究图像边缘检测算法具有极其重要的意义。 边缘检测是计算机视觉和图像处理领域的一项基 本内容。准确、高效地提取出边缘信息一直是该领域 研究的重点内容 [11] 。最初的经典算法可分为边缘算子 法、曲面拟合法、模板匹配法、门限化法等。近年来, 随着数学理论和人工智能的发展,又出现了一些新的 边缘检测的算法 [12?13] ,如基于数学形态学的边缘检 测 [14] 、小波变换和小波包变换的边缘检测法 [15] 、基于 模糊理论的边缘检测法 [16?17] 、基于神经网络的边缘检 测法 [18] 、基于分形几何的边缘检测算法 [19] 、基于遗传 算法的边缘检测法 [20?21] 、漫射边缘的检测方法 [22] 、多 尺度边缘检测技术 [23] 、亚像素边缘的定位技术 [24] 、 收稿日期:2011?04?15;修回日期:2011?06?15 基金项目:轨道交通控制与安全国家重点实验室开放基金资助项目(RCS2010K02);机器人学国家重点实验室开放基金资助项目(RLO200801);北 京交通大学基本科研业务费资助项目(2011JBM019) 通信作者:王敏杰(1988-), 女, 黑龙江五常人, 硕士研究生, 从事图像处理和计算机视觉研究; 电话: 010-51468132; E-mail: wangminjie1118@https://www.360docs.net/doc/0616996821.html,
图像增强与边缘检测..
数字图像处理作业----第三次 1、什么是图像增强?常见算法有哪些?典型算法的程序实现,其优缺点?结果对比。 1.1图像增强的定义 为了改善视觉效果或者便于人和机器对图像的理解和分析,根据图像的特点或存在的问题采取的简单改善方法或者加强特征的措施称为图像增强。 一般情况下,图像增强是按特定的需要突出一幅图像中的某些信息,同时削弱或去除某些不需要的信息的处理方法,也是提高图像质量的过程。图像增强的目的是使图像的某些特性方面更加鲜明、突出,使处理后的图像更适合人眼视觉特性或机器分析,以便于实现对图像的更高级的处理和分析。图像增强的过程往往也是一个矛盾的过程:图像增强希望既去除噪声又增强边缘。但是,增强边缘的同时会同时增强噪声,而滤去噪声又会使边缘在一定程度上模糊,因此,在图像增强的时候,往往是将这两部分进行折中,找到一个好的代价函数达到需要的增强目的。传统的图像增强算法在确定转换函数时常是基于整个图像的统计量,如:ST转换,直方图均衡,中值滤波,微分锐化,高通滤波等等。这样对应于某些局部区域的细节在计算整幅图的变换时其影响因为其值较小而常常被忽略掉,从而局部区域的增强效果常常不够理想,噪声滤波和边缘增强这两者的矛盾较难得到解决。 1.2 图像增强的分类及方法 图像增强可分成两大类:频率域法和空间域法。前者把图像看成一种二维信号,对其进行基于二维傅里叶变换的信号增强。采用低通滤波(即只让低频信号通过)法,可去掉图中的噪声;采用高通滤波法,则可增强边缘等高频信号,使模糊的图片变得清晰。具有代表性的空间域算法有局部求平均值法和中值滤波(取局部邻域中的中间像素值)法等,它们可用于去除或减弱噪声。 图像增强的方法是通过一定手段对原图像附加一些信息或变换数据,有选择地突出图像中感兴趣的特征或者抑制(掩盖)图像中某些不需要的特征,使图像与视觉响应特性相匹配。在图像增强过程中,不分析图像降质的原因,处理后的图像不一定逼近原始图像。图像增强技术根据增强处理过程所在的空间不同,可分
实验三 图像的边缘检测
实验三图像的边缘检测 一、实验目的与要求 1、了解图像边缘提取的基本概念; 2、了解进行边缘提取的基本方法; 3、编程实现对所给图像的边缘进行提取。 二、知识点 1、边缘检测的思想和原理 图像理解是图像处理的一个重要分支,研究为完成某一任务需要从图像中提取哪些有用的信息,以及如何利用这些信息解释图像。边缘检测技术对于处理数字图像非常重要,因为边缘是所要提取目标和背景的分界线,提取出边缘才能将目标和背景区分开来。在图像中,边界表明一个特征区域的终结和另一个特征区域的开始,边界所分开区域的内部特征或属性是一致的,而不同的区域内部的特征或属性是不同的,边缘检测正是利用物体和背景在某种图像特性上的差异来实现的,这些差异包括灰度,颜色或者纹理特征。边缘检测实际上就是检测图像特征发生变化的位置。 由于噪声和模糊的存在,检测到的边界可能会变宽或在某些点处发生间断,因此,边界检测包括两个基本内容:首先抽取出反映灰度变化的边缘点,然后剔除某些边界点或填补边界间断点,并将这些边缘连接成完整的线。边缘检测的方法大多数是基于方向导数掩模求卷积的方法。导数算子具有突出灰度变化的作用,对图像运用导数算子,灰度变化较大的点处算得的值比较高,因此可将这些导数值作为相应点的边界强度,通过设置门限的方法,提取边界点集。
一阶导数是最简单的导数算子,它们分别求出了灰度在x和y方向上的变化率,而方向上的灰度变化率可以用相应公式进行计算;对于数字图像,应该采用差分运算代替求导,差分公式参考相关教材。 2、常用的梯度算子 (1)Roberts Cross算子,它的2个2 X2模板如图3所示。 图3 Robert Cross算子模板 (2)Prewitt 算子,它的2个3×3模板如图4所示。 图4 Prewitt算子模板 (3)Sobel 算子,它的2个3×3模板如图5所示。 图3 Sobel算子模板 3、高斯拉普拉斯(LoG)算法 高斯拉普拉斯(LoG)算法是一种二阶边缘检测方法。它通过寻找图像灰度值中二阶微分中的过零点(Zero Crossing)来检测边缘点。其原理为,灰度
图像边缘检测方法的比较
课程大作业实验报告 图像边缘检测方法的比较 课程名称:数字图像处理 指导教师 报告提交日期2010年05月项目答辩日期2010年05月
目录 1、项目要求 (3) 1.1、要求一 (3) 1.2、要求二 (3) 1.3、要求三 (3) 2、项目开发的环境 (3) 3、边缘检测的系统分析 (4) 3.1、系统模块分析 (4) 3.2、系统的关键问题以及解决方法 (4) 4、系统设计 (5) 4.1程序的流程图以及说明 (5) 4、2程序的主要功能模块 (7) 4.2.1 水平梯度算子模块 (7) 4.2.2 垂直梯度算子模块 (8) 4.2.3 水平垂直梯度算子模块 (8) 4.2.4 罗伯茨算法模块 (9) 4.2.5 Sobel模块 (10) 4.2.6 Prewitt模块 (11) 4.2.7 拉普拉斯边缘检测模块 (11) 4.2.8 基于Kirsch算子的快速边缘检测模块 (11) 4.2.9 Robinson算法模块 (12) 4.2.10 高斯LOG模块 (13) 4.2.11 梯度幅值自适应 (14) 5.实验结果与分析 (14) 5.1 实验结果和分析 (15) 5.2 项目的创新之处 (19) 5.3 存在问题及改进设想 (19) 6.心得体会 (20) 6.1 系统开发的体会 (20) 6.2 对本门课程的改进意见或建议 (20)
1 项目要求 1.1 对以下方法编程实现: (1)水平梯度算子; (2)垂直梯度算子; (3)水平垂直梯度算子; (4)罗伯茨梯度算子; (5)拉普拉斯算子; (6)柯西算子; (7)Prewitt算子; (8)Sobel算子; (9)拓展:其他的边缘检测算法 1.2 界面整合为菜单形式,在程序的主界面上显示每种方法的处理时间(利用C语言的 时间函数,计算出处理时间)。 1.3 有好的PPT和电子文档。 2 项目开发的环境 硬件部分:PC机 软件部分:CVI5.0、IMAQ vision(Imaq_CVI.fp、Imaq_CVI.h、Imaq_CVI.lib) 使用语言:C语言
图像边缘检测方法的研究与实现刘法200832800066
青岛大学 专业课程设计 院系: 自动化学院 专业: 电子信息工程 班级: 08级电子信息工程3班 学生姓名: 刘法 指导教师: 王汉萍庄晓东 日期: 2011年12月23日 题目:图像边缘检测方法的研究与实现 一、边缘检测以及相关概念 1.1边缘,边缘检测的介绍 边缘(edge)是指图像局部强度变化最显著的部分.边缘主要存在于目标与目标、目标与背景、区域与区域(包括不同色彩)之间,是图像分割、纹理特征和形状特征等图像分析的重要基础.图像分析和理解的第一步常常是边缘检测(edge detection). 边缘检测是指使用数学方法提取图像像元中具有亮度值(灰度)空间方向梯度大的边、线特征的过程。 在讨论边缘算子之前,首先给出一些术语的定义: 边缘点:图像中具有坐标] i且处在强度显著变化的位置上的点. ,[j 边缘段:对应于边缘点坐标] i及其方位 ,边缘的方位可能是梯度角. ,[j 边缘检测器:从图像中抽取边缘(边缘点和边缘段)集合的算法. 轮廓:边缘列表,或是一条表示边缘列表的拟合曲线. 边缘连接:从无序边缘表形成有序边缘表的过程.习惯上边缘的表示采用顺时针方向序. 边缘跟踪:一个用来确定轮廊的图像(指滤波后的图像)搜索过程. 边缘点的坐标可以是边缘位置像素点的行、列整数标号,也可以在子像素分辨率水平上表示.边缘坐标可以在原始图像坐标系上表示,但大多数情况下是在边缘检测滤波器的输出图像的坐标系上表示,因为滤波过程可能导致图像坐标平移或缩放.边缘段可以用像素点尺寸大小的小线段定义,或用具有方位属性的一个点定义.请注意,在实际中,边缘点和边缘段都被称为边缘.
边缘连接和边缘跟踪之间的区别在于:边缘连接是把边缘检测器产生的无序边缘集作为输入,输出一个有序边缘集;边缘跟踪则是将一幅图像作为输入,输出一个有序边缘集.另外,边缘检测使用局部信息来决定边缘,而边缘跟踪使用整个图像信息来决定一个像素点是不是边缘. 1.2 边缘检测算子 边缘检测是图像特征提取的重要技术之一, 边缘常常意味着一个区域的终结和另一个区域的开始. 图像的边缘包含了物体形状的重要信息,它不仅在分析图像时大幅度地减少了要处理的信息量,而且还保护了目标的边界结构. 因此,边缘检测可以看做是处理许多复杂问题的关键. 边缘检测的实质是采用某种算法来提取出图像中对对象与背景间的交界线。图像灰度的变化情况可以用图像灰度分布的梯度来反映,因此可以用局部图像微分技术来获取边缘检测算子。经典的边缘检测方法是对原始图像中的像素的某个邻域来构造边缘检测算子。以下是对几种经典的边缘检测算子进行理论分析,并对各自的性能特点做出比较和评价。 边缘检测的原理是:由于微分算子具有突出灰度变化的作用,对图像进行微分运算,在图像边缘处其灰度变化较大,故该处微分计算值教高,可将这些微分值作为相应点的边缘强度,通过阈值判别来提取边缘点,即如果微分值大于阈值,则为边缘点。 Roberts,Sobel,Prewwit是基于一阶导数的边缘检测算子,图像的边缘检测是通过2*2或者3*3模板作为核与该图像中的每个像素点做卷积和运算,然后选取合适的阈值以提取边缘。 Laplace边缘检测算子是基于二阶导数的边缘检测算子,该算子对噪声敏感。Laplace算子的改进方式是先对图像进行平滑处理,然后再应用二阶导数的边缘检测算子,其代表是拉普拉斯高斯(LOG)算子。前边介绍的边缘检测算法是基于微分方法的,其依据是图像的边缘对应一阶导数的极大值点和二阶导数过零点。Canny算子是另外一类边缘检测算子,它不是通过微分算子检测边缘,而是在满足一定约束条件下推导出的边缘检测最优化算子。 1.3 边缘检测算法 对于边缘的检测常常借助于空域微分算子进行,通过将其模板与图像卷积完成。两个具有不同灰度值的相邻区域之间总存在灰度边缘。灰度边缘是灰度值不连续(或突变) 的结果,这种不连续常可利用求一阶和二阶导数方便地检测到。已有的局部技术边缘检测方法,主要有一次微分(Sobel 算子、Robert s 算子等) 、二次微分(拉普拉斯算子等)。这些边缘检测器对边缘灰度值过渡比较尖锐且噪声较小等不太复杂的图像,大多数提取算法均可以取得较好的效果。但对于边缘复杂、采光不均匀的图像来说,则效果不太理想。主要表现为边缘模糊、边缘非单像素宽、弱边缘丢失和整体边缘的不连续等方面。 用算子检测图像边缘的方法是用小区域模板对图像进行处理,即采用卷积核作为掩模模板在图像中依次移动,完成图像中每个像素点同模板的卷积运算,最终输出的边缘幅度结果可以检测出图像的边缘。卷积运算是一种邻域运算。图像处理认为:某一点像素的结果不但和本像素灰度有关,而且和其邻域点值有关。运用模板在图像上依此对每一个像素进行卷积, 即模板上每一个点的值与其在图像上当前位置对应的像素点值相乘后再相加,得出的值就是该点处理后的新值。 边缘检测算法有如下四个步骤: