使用ZEMAX设计的典型实例分析
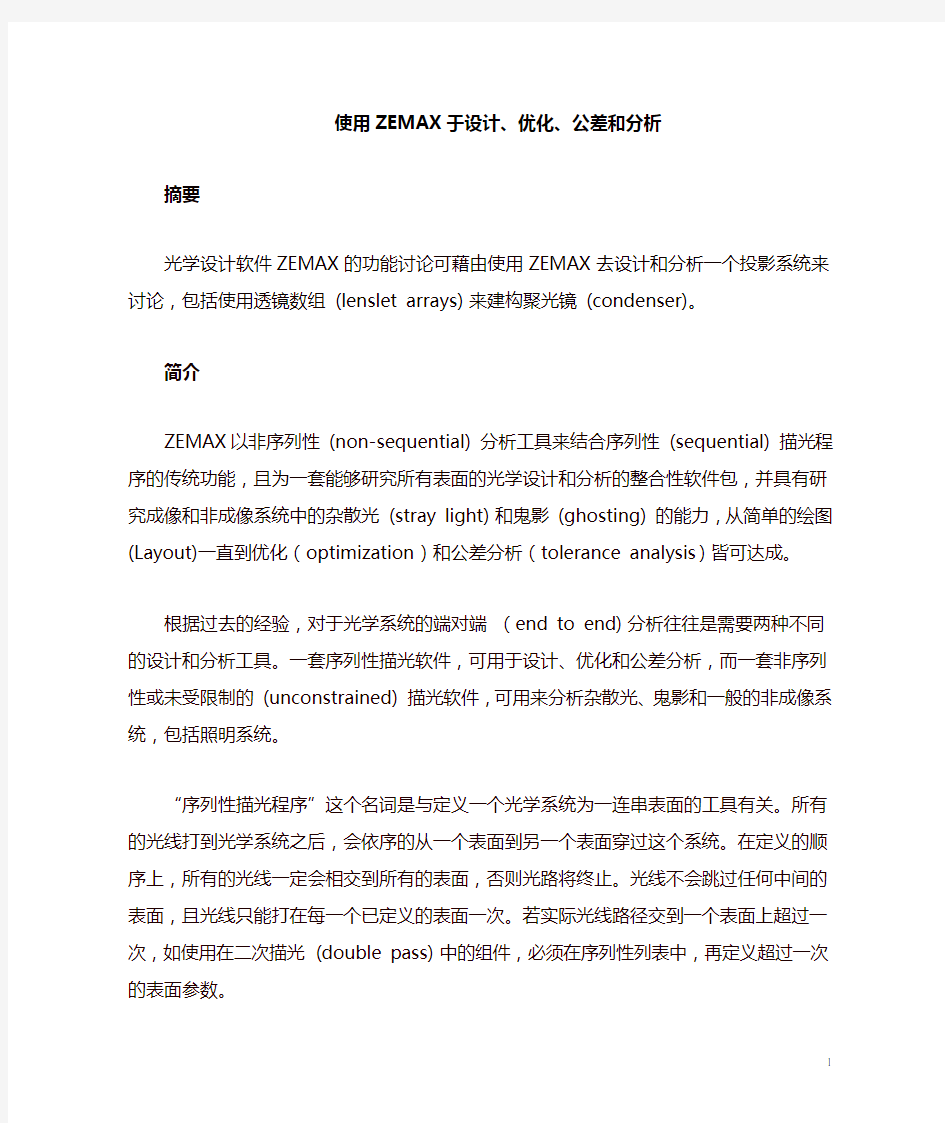
使用ZEMAX于设计、优化、公差和分析
摘要
光学设计软件ZEMAX的功能讨论可藉由使用ZEMAX去设计和分析一个投影系统来讨论,包括使用透镜数组(lenslet arrays) 来建构聚光镜(condenser)。
简介
ZEMAX以非序列性(non-sequential) 分析工具来结合序列性(sequential) 描光程序的传统功能,且为一套能够研究所有表面的光学设计和分析的整合性软件包,并具有研究成像和非成像系统中的杂散光(stray light) 和鬼影(ghosting) 的能力,从简单的绘图(Layout)
一直到优化(optimization)和公差分析(tolerance analysis)皆可达成。
根据过去的经验,对于光学系统的端对端(end to end)分析往往是需要两种不同的设计和分析工具。一套序列性描光软件,可用于设计、优化和公差分析,而一套非序列性或未受限制的(unconstrained) 描光软件,可用来分析杂散光、鬼影和一般的非成像系统,包括照明系统。
“序列性描光程序”这个名词是与定义一个光学系统为一连串表面的工具有关。所有的光线打到光学系统之后,会依序的从一个表面到另一个表面穿过这个系统。在定义的顺序上,所有的光线一定会相交到所有的表面,否则光路将终止。光线不会跳过任何中间的表面,且光线只能打在每一个已定义的表面一次。若实际光线路径交到一个表面上超过一次,如使用在二次描光(double pass) 中的组件,必须在序列性列表中,再定义超过一次的表面参数。
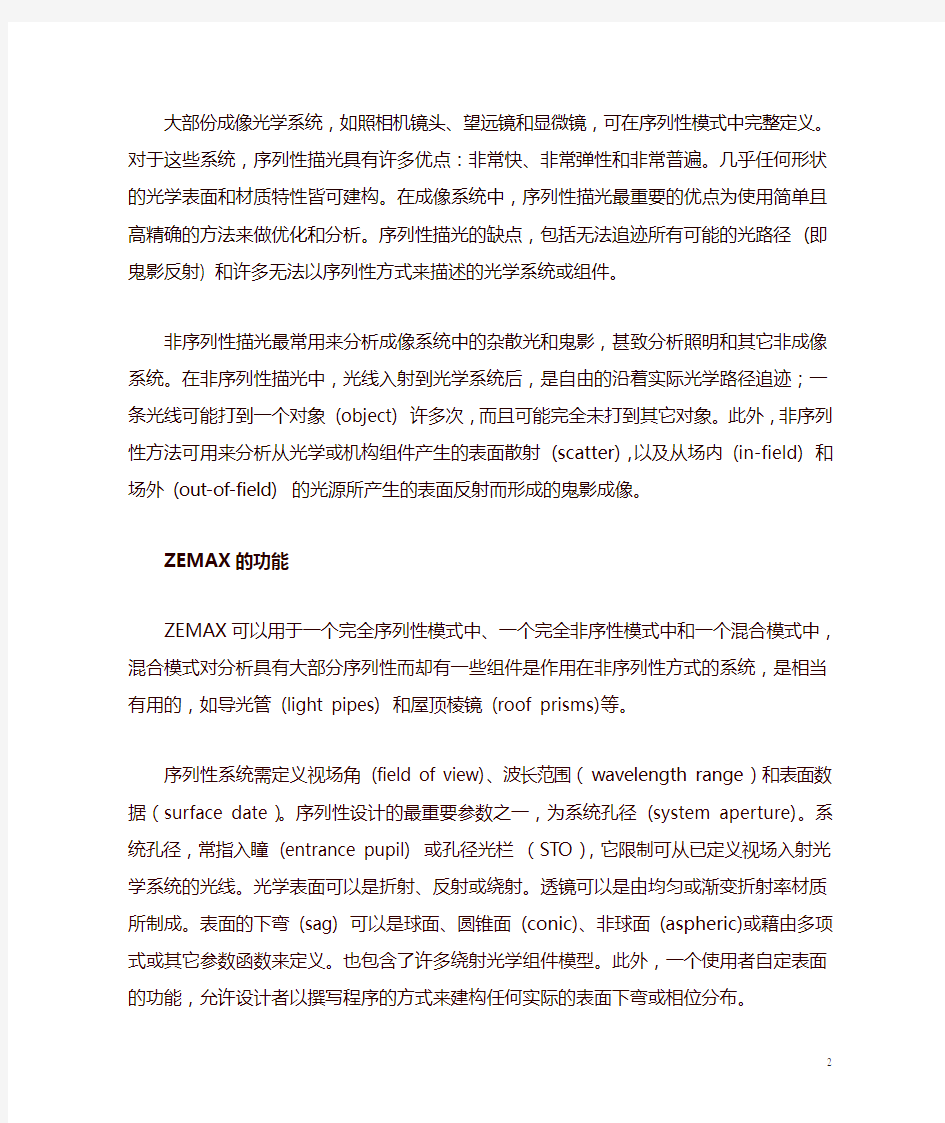
大部份成像光学系统,如照相机镜头、望远镜和显微镜,可在序列性模式中完整定义。对于这些系统,序列性描光具有许多优点:非常快、非常弹性和非常普遍。几乎任何形状的光学表面和材质特性皆可建构。在成像系统中,序列性描光最重要的优点为使用简单且高精确的方法来做优化和分析。序列性描光的缺点,包括无法追迹所有可能的光路径(即鬼影反射) 和许多无法以序列性方式来描述的光学系统或组件。
非序列性描光最常用来分析成像系统中的杂散光和鬼影,甚致分析照明和其它非成像系统。在非序列性描光中,光线入射到光学系统后,是自由的沿着实际光学路径追迹;一条光线可能打到一个对象(object) 许多次,而且可能完全未打到其它对象。此外,非序列性方法可用来分析从光学或机构组件产生的表面散射(scatter),以及从场内(in-field) 和场外(out-of-field) 的光源所产生的表面反射而形成的鬼影成像。
ZEMAX的功能
ZEMAX可以用于一个完全序列性模式中、一个完全非序性模式中和一个混合模式中,混合模式对分析具有大部分序列性而却有一些组件是作用在非序列性方式的系统,是相当有用的,如导光管(light pipes) 和屋顶棱镜(roof prisms)等。
序列性系统需定义视场角(field of view)、波长范围(wavelength range)和表面数据(surface date)。序列性设计的最重要参数之一,为系统孔径(system aperture)。系统孔径,
常指入瞳(entrance pupil) 或孔径光栏(STO),它限制可从已定义视场入射光学系统的光线。光学表面可以是折射、反射或绕射。透镜可以是由均匀或渐变折射率材质所制成。表面的下弯(sag) 可以是球面、圆锥面(conic)、非球面(aspheric)或藉由多项式或其它参数函数来定义。也包含了许多绕射光学组件模型。此外,一个使用者自定表面的功能,允许设计者以撰写程序的方式来建构任何实际的表面下弯或相位分布。
一些功能可以用来分析系统,包括数个系统绘图(layouts) 类型、汇出CAD格式的表面信息功能、光点图(spot diagrams)、光扇图(ray fan) 和光程差图、光学调制传递函数(modulation transfer function,MTF) 和点扩散函数(point spread function,PSF) 图、包围圆(encircled) 和包围矩形(ensquared) 的能量信息、像差计算( 塞德(Seidel) 和泽尼克(Zernike) )、理想或偏斜(skew) 高斯光束参数计算、极化描光和波前传播工具。
优化
序列性描光软件的关键功能即是可以快速且精确的优化一个光学设计。主要的优化技巧是以减幅最小均方根(damped least squares,DLS) 的算法为基础,并使用主动减幅(active damping)。此外,ZEMAX包括全域性优化功能,其以结合减幅最小均方根过程的优化算法为基础。优化是以使系统绩效函数(merit function) 的总值达到最小为基础。简单的说,绩效函数为一种对一个理想光学系统的数值描述。重要的是,绩效函数代表光学系统的要求性能。对于既定的设计,可以适当的选用好几个预设的绩效函数。对于成像系统,绩效函数可用来特别地针对减小光学像差,藉由限制光线在成像面上的延伸,或使从理想球面的系统波前偏差减至最小。许多其它的优化参数也用来修改标准绩效函数或建立一个使用者自定的绩效函数。
当执行优化时,ZEMAX对任何使用者建构的系统或表面参数,决定最理想的值。几乎任何参数,包括曲率、厚度、玻璃特性、非球面系数和视场或波长资料,皆可设为变数。可以对可接受的参数值范围内下限制,以确保可以轻易的建构一个合理的系统。
公差分析
在完成光学系统的设计之后,执行公差分析是重要的。公差分析为一种统计的过程,用来有系统地引入缺陷到光学设计中,以决定任何系统参数的误差对整体而言,如何影响系统性能。公差分析是必须的,因为没光学组件是光滑的,或者当设计好时,可以精确地组装系统。公差分析可用来决定每个系统参数的可接受值范围。这个信息之后可以用来决定任何系统的可能性、以公差范围内来制造、在指定的性能水平之上工作。ZEMAX包括一个广泛的、完整的公差分析算法,允许设计者自由完成任何光学设计的公差。可以决定出相对于任何性能尺寸的公差,且可以包括任何补偿因子的影响,甚至机构的部分或光学的部分将被用来组装,或系统的使用。
波前传播
几何光线追迹为一般用来描述光的传播通过一个光学系统的方法。如同先前所描述的,光线追迹对于分析许多光学系统来说,为一种非常精确的方法,然而这个模型的实用性有一些限制。光线模型的限制是因为光线追迹而产生,每条光线是独立的,即:一条光线传播的路径是可以完全决定的,而不受其它光线的影响。光线之间不会发生干涉(interference)。
若光线与一个限制孔径或遮挡物的表面相交,光线不是被挡住就是通过,但在其它方面,光线路径是不受影响的,光线不会发生绕射现象。ZEMAX包含了数个光线为基础的绕射计算,包括PSF和MTF,为包括单阶的夫琅和费(Fraunhofer)计算,波前从近场(出瞳) 传播到远场(成像面)。这些计算只可以在成像系统中执行,且在非常接近成像的表面。
当以光线为基础的方法不适用时,ZEMAX中的物理光学传播(Physical Optics Propagation,POP) 工具可用来分析系统,包括表面非常接近焦点、表面远离焦点但接近绕射孔径(diffracting apertures)和平行光的传播,或行经长距离后的近似平面波前。
使用POP,任何波前,包括高斯和混合的高阶模态光束、帽盖形(top hat) 分布或任意的使用者自定波前,皆可以传播通过任何ZEMAX的设计档案。几乎支持所有表面型态。从任何场点来的波前可插入光学系统中的任何位臵(不会仅能在已定义的物面位臵)。波前传播通过每个表面,且相位强度的信息可以在每个表面被计算。POP功能非常有用地被用于空间滤波(spatial filters)、分析光束成形的光学系统或任何其它与干涉和绕射有关的光学系统,如绕射菲涅耳区域平板(Fresnel Zone Plates)。
极化光线追迹
光可以用光线来模拟,并以位臵、方向、相位和振幅来表示之。然而,光也与电场有关。电场的方向与传播方向互相垂直,且随着时间的改变,其方向和大小亦会有所变化。当光线传播通过一个光学系统时,其极化状态一般并无需有守恒的关系存在。
当极化光线传播通过一个光学系统时,极化光线追迹可追踪光线极化的状态。介质间的界面,包括空气、玻璃和金属,会导致衰减(attenuation) 和延缓(retardance)的变化产生,和改变极化椭圆(polarization ellipse) 的形状。而入射角和波长的关系则会减少表面的传输。这些在传输相位上的变化,称为极化像差(polarization aberrations)。这些像差会导致MTF和斯奈尔比(Strehl ratio)值变小,此外亦会使得系统性能降低。实际上,这些像差并没有不同于任何其它成像的像差。ZEMAX可以在任何类型的光学表面上,完整建构出任何薄膜干涉的镀膜层。极化光线追迹的计算,包括薄膜镀膜层、体积吸收(volumetric absorption) 和波长与入射角的影响,能更精确地预测真实系统的性能。
非序列性分析
使用非序列性分析,光学组件必须以真实对象来表示,而不是以表面来表示。并允许以光线追迹的方法来决定对象被光线打到的顺序。这不仅包括对象的顺序,也包括对象上的特殊表面或小刻面(facet) 的顺序。控制杂散光、分析成像系统中的鬼影、设计照明和其它非成像光学系统时,这样的功能是重要的。
非序列性分析不会被已定义的系统孔径所限制。任何光分布种类的光源可以放臵在光学空间中的任何位臵。从任何光源发射出的光线可以朝任何有实际意义的方向传播。打到光学或机构组件上的一条特定光线的顺序,可藉由光线的位臵、目前传播的方向和其它组件的位臵来决定。被光打到的对象将是沿光线传播方向上最接近光源的对象。此外,在非序列性空间中,在每个光线表面交点上,任何光线可以分裂(split) 成任何数目的子光线。每条子光线将与父段中的一些能量有关。这样一来,便允许追迹所有的折射、反射、散射和绕射能量路径。建构诸如菲涅耳反射的影响来分析成像系统的鬼影,和在粗糙的或光滑的机构或光学
组件上建构散射面来研究杂散光影响皆是必须的。每一条子光线的能量可以藉由极化光线追迹来决定,这对研究鬼影的相对强度和建构诸如干涉仪(interferometers) 的系统,包括整形平板(shearing plates) ,是很重要的。对于散射特性,使用者可自由的指定任何表面粗糙的种类,然后分裂子光线的散射分布模型。
检测面装臵是用在非序列性分析中。检测面为奇特的表面,不是平的就是弯曲的,是用来量测入射在检测面位臵上的能量。可以赋予检测面表面性质来模仿真实检测器的效果,包括用于Narcissus分析的反馈(self-reflection)。可量测包括非同调或同调发光、同调相位和发光强度。并提供幅射度(Radiometric) 或光度(photometric) 信息。复杂的筛选功能可用于从指定的光源而来所截取的能量信息,包括仅观看鬼影、折射、反射、散射或绕射能量,并在所指定的对象上做限制。在追踪杂散光和鬼影问题上,这些筛选功能(filters) 是很重要的。所筛选的光线信息也可以用来产生以通过筛选功能为基础的光源光线数据。这个功能可以用于反向光线追迹的分析。
以上所述为ZEMAX的概述。有许多其它的功能还没有提到。我们现在将应用ZEMAX 于特定问题:一个投影系统的设计和分析,包括聚光镜(condenser) 和投影机的设计。
投影系统的设计和分析
我们将看到使用ZEMAX来设计和分析由一聚光镜配件所组成的投影系统,其能在投影镜头的输入端提供均匀的照明。一个8 mm长的灯丝光源所发出的光在经过聚光镜后,将在底片闸(film gate) 上形成均匀的能量分布。投影机会产生一个640 ×480 mm的影像到距输出端2000 mm远的屏幕上。两个次要配件中的每一个次要配件将可序列性的设计(优化),然后将这个系统组合起来,所以能计算出整个系统的照明和成像性质。
聚光镜的设计
聚光镜必须收集从光源发出来的光,并在底片闸(film gate) 上形成均匀分布的光。此处考虑的聚光镜将由一准直镜配件所组成,用来使沿着两个透镜数组中的第一个透镜数组传播的初始光源能量平行。第一透镜数组,为场透镜数组(field array),用于收集从延伸光源(此处是线光源)对象来的能量,和在第二或成像透镜数组(imaging array) 中的每一个透镜上的光源之重新成像(reimage)。在远距离的时候,成像透镜数组会将所有分开的光源影像,形成一部分重迭的影像;然而聚光镜取而代之的将这些重迭的光源影像重新成像在底片闸(film gate) 位臵上。对于这个设计,准直镜和聚光镜组件将完全相同于两透镜配件。这并非必要的,但对于控制成本来说是相当有用的。
透镜数组
透镜数组通常用在照明系统。每一数组会形成一个最终影像,其影像是所有独立影像的迭加。每一个透镜的形状大小将会影响最后的能量分布。对于已知孔径大小的透镜,具有较短焦距(较大的F/#)的系统将会产生较广的光分布。
投影系统通常需要两个透镜数组(也就是常用的复眼透镜)。单一透镜数组只能使用在小的光源分布。对于单一透镜数组,从延伸光源出来的离轴能量将成像在底片闸(film gate) 上的不同位臵。藉由使用一额外的场透镜数组,全部的光源影像会在底片闸(film gate)上均
匀的重新组合。系统的视场角(光源大小) 会被透镜数组的F/#所限制。相当重要的是,从场透镜数组中的任何透镜出来的所有能量,需落在成像透镜数组中的相同透镜上,否则将会在底片闸(film gate) 上变模糊(blurring),降低均匀度(uniformity)。这可由图1和图2中来看到,显示对于一延伸光源的对象,单一透镜数组和双透镜数组的照明会有所不同。
图1. 在单一透镜数组设计中的照明
图 2. 双透镜数组的照明设计(第一个是场透镜数组,第二个是成像透镜数组)
数组必要条件
在设计此类的系统时需要考察数个参数,包括:
1) 在底片闸(film gate) 上所需的照明大小
2) 场透镜数组的透镜大小和位臵:
假如数组大小固定的话,较多的透镜通常会产生较好的均匀度但限制了F/#。
数组的位臵通常由机构的限制来决定。
3) 成像透镜数组的大小和位臵:
数组必须在场透镜数组的焦点上。
基于成本和装配的理由,数组通常是完全相同的。
4) 场透镜数组的焦距:
必须在第二透镜数组上成像,但没有打满光线(overfilling)。
以ZEMAX来做设计
将藉由使用ZEMAX来决定聚光镜的参数来序列性地分析这个设计。聚光镜的要求,
整体来说相当复杂,且照明系统并不会形成一真实的像,故可能使得优化过程复杂化。然而,这个设计可划分成两个不同的工作,每一个都是简单的设计工作。第一个问题仅是准直镜和聚光镜的设计。从光源发出的光将会被准直,然后重新成像在底片闸(film gate) 位臵上,犹如透镜数组不存在般。将光场透镜数组成像到底片闸(film gate) 位臵上是第二个设计上的议题。合并这两个设计的结果就是最后的聚光镜装配。这种型态的设计要求可很快地以ZEMAX的多重组态功能来建构。
多重组态的设计
一个多重组态的设计是参照一光学系统,其系统是经由多于一种的模式或结构来分析。对于多重结构的分析,最普遍的应用之一就是变焦镜头(zoom lens),其可允许光学组件的位臵以焦距或放大率为函数做改变。其它普遍的系统,包括消温差设计(athermalized designs)、多重光路系统(multi-path systems) 和扫描系统(scanning systems)。
多重组态系统的设定与单组态系统设定非常类似。多重组态编辑器是用来表示那些在不同组态间变化的设计参数。对于这个设计,我们将需要三种组态:第一个组态将建构整个系统,以致于能在底片闸(film gate) 上决定均匀度。第二个组态将用来优化相匹配的准直镜和聚光镜的光学组件。第三个组态将用来决定焦距和透镜数组的间隔。
系统参数
对于准直镜和聚光镜,选择准直镜的焦距为60 mm。光源为8 mm长的灯丝,透镜数组为84 mm的正方形,有7 x 7的透镜结构。照明斑点的要求大小为16 mm。从这些我们可以决定出数组的焦距:
重要的是,在第二透镜数组上的光源成像大小不能超出透镜组件的大小:
透镜的大小需合适于初始光源的大小。
初始系统设定
最终的透镜参数、厚度、间距、曲率等,将藉由使用ZEMAX的优化功能来决定。一
个初始系统,包括基本数据,如光学表面的数目、初始材质的选定和系统孔径,必须在执行优化前提供。
准直镜和聚光镜皆是由两个透镜组件所组成。也将有两个数组式单透镜(lenslet arrays),其上共有六个光学组件。整个系统将首先定义(结构1),然后将提供多重组态(configuration 1) 数据。表1列出初始透镜参数。
表 1. 初始透镜参数
多重组态编辑栏可用来定义出准直镜、聚光镜和透镜数组间的不同优化参数。显示在表2中。数个列出来的多重组态参数可用来维持系统的设定对称。
表2. 多重组态参数
图3显示三种组态的初始设计。组态1在最下方,组态3在最上方。
图3. 使用三重组态的Layout图来优化聚光镜
绩效函数将使用标准的成像要求,以均方根光点大小(RMS spot size) 法,来个别对光源经过准直镜和聚光镜对成像,然后光源同时成像于场数组和底片闸的位臵。光源是藉由沿着8 mm直性范围的数个点(常取有限个间隔相同的点)光源来定义。准直镜和数组的焦距要求也将在绩效函数中控制。优化设计很容易符合设计要求。图4显示聚光镜的最后设计结果。图5显示在底片闸位臵的照明分布。结果的分布显示出在要求的16 mm正方形范围上有高的均匀度(uniformity),而在这个范围之外能量较低。
图 4. 优化后的聚光镜Layout
图5. 在底片闸上的照明分布
投影光学
投影光学的设计是以双高斯(double Gauss) 系统为基础。系统的孔径应该与离开聚光镜后的最大输出分布相匹配。虽然系统在此已考察过特定放大率和成像位臵,但多重组态在此设计中也可以用来优化放大率和聚焦长度在某范围内的性能。此设计的聚焦长为52 mm、物空间数值孔径(object space NA) 为0.35、物高为16 mm。在全视场范围内,优化是以使均方根光点大小减到最小为基础。从长共轭系统(long conjugate) 来优化设计。在结合聚光镜到投影机设计之前,将反向做最后的计算。图6显示投影机光学的设计。放臵于距离最后一个透镜表面2000 mm的成像面将不显示。
图6. 投影镜头
系统组装
使用ZEMAX的非序列性功能来分析全部配件的要求。这将允许复杂光源分布的建构,和建构照明与幻灯片对象的投影。大部分所使用的组件可以使用ZEMAX主选单的选项,来直接转成非序列性设计。聚光镜配件将首先转换。使用序列性建构的透镜数组,其设计参数是不同于非序列性模型,所以将需要个别定义。
使用适当的工具,可转换聚光镜设计为非序列性形式。两个个别的透镜也定义为非序列性的,表示两个数组的中心组件。“复制工具(Replicator Tool) ”可用来产生每个数组的重复性组件。图7显示透镜数组的形状。每个小透镜是12 mm的正方形。
图7. 透镜数组
投影镜头现在也转换成非序列性系统。所有表面可直接转换成ZEMAX的非序性对象。新的对象可轻易的复制到非序列性组件编辑栏(Non-Sequential Component Editor) 中,并已包含了聚光镜的信息。使用放臵投影机组件相对于底片闸位臵的功能以确保所有的组件能正确的摆放。图8显示相结合的光学系统。箭头表示光源的位臵。
图8. 聚光镜和投影配件
在非序列性分析中,检测面可以放到光学系统中来分析感兴趣位臵上的能量分布。在这个系统中,感兴趣的位臵是在底片闸、成像面和成像的数组。这个信息对确保光源能量没有充满数组是很重要的。理想上,光源的成像应该是在每一个透镜上所成的像。
除了考察系统的成像性质外,非序列性分析对于杂散光和散射光分析也是有用的。机构组件,如挡板(baffles)、镜头套桶(lens barrels) 和星形轮(spiders) ,可以加入设计中。表面散射信息也可以更精确的使用于建构杂散光效应。
以分析系统的成像品质开始。将需要在准直镜的焦点建构一个延伸光源(extended source) 和在底片闸位臵放臵幻灯片模型。从光源发出的光将传播通过准直镜;打到底片闸,光传播通过投影机到成像面。任何JPG或BMP档案可以放在底片闸上,这将允许投影系统性能的真实表现。图9显示被照明的对象,而图10显示在屏幕位臵上的放大成像。为了实际示范,将使用一个延伸的高斯分布光源。
图9. 幻灯片对象(图片大小18mm×14mm)
图10. 投影系统所形成的放大成像(图片大小640mm×480mm)
对于灯丝光源(filament source),离开光源的大部分能量是朝向离开准直镜。为了增加系统的效率,一个反射组件常放在光源之后来截取这些能量的部分,并改变方向反向朝准直镜。对于这一类的照明具,从光轴补偿光源是很重要的。这将防止重新成像的光源能量造成过热(heating) 和损坏灯丝的可能性。落在相同的成像阵组件上的灯丝成像仍然是必须的。这个系统显示在图11中。
图11. 补偿灯丝光源在第二个数组上的成像
下一步的设计将包括加入镜头夹具(mounts)、挡板(baffles) 和其它机构组件,并使杂散光和鬼影减到最小。可以使用ZEMAX本身的对象或汇入CAD软件所设计的对象来建构这些组件,以便做更进一步的分析。
结论
ZEMAX这套软件有很强大的功能,对于成像系统和分析照明系统的整体表现,包括杂散光和散射光,可当作设计和优化的工具。投影系统的设计,可用来验证这些功能如何让光学工程师能几乎毫无隔阂的在不同的分析模式下使用。
zemax变焦设计操作
各位网友:你们好! 前面发的关于“数码镜头设计原理”中的前两贴想已见过了,那里介绍的是最基础的东西。现在光电产品千变万化,但万变不离其宗,其基本原理,基本理论确不象外表那样善变,使人迷糊。如果我们建立了扎实的光学与数学的理论基础,那么在接触新产品后,就能快的多的消化吸收,由被动的感性认识,提升为主动的理性认识,,从而在设计上游刃有余。 现在光电产品出现了许多新的特征,利用基础理论去探讨其内在的规律、推演公式去精确的把握它。在“数码镜头设计原理_变焦篇”中,是基础篇、高级篇基本理论的引深。变焦设计是个很复杂的过程,有很多是凭着感觉走的。感觉就是灵感,它能快速引导设计人员在迷宫中及时调整方向,免除了在局部问题上纠缠不休,向更具创造性的思维迈进。感觉是我们以基本理论作基石,实践经验为引导,在设计领域产生的奇思妙想。例如:我们在引用专利时,往往是将一个专利改进成合于我们产品性能要求就行了。大家想过没有,专利也可东拼西凑?如果能这样做,就能使专例可利用的价值大大提升,同时也免除了专利侵权的尴尬场面发生。另外想过没有,虚拟玻璃在光学设计中不太好控制。我们可否用特定的方法有效的控制它:我们将玻璃改成虚拟玻璃,然后控制优化步长为单步,或五步。这样不断观查那些玻璃超出范围,超出的退回前步(每一步存盘一次,退回操作就可用调前次文件来实现),将其固定(不设为变量)。由于虚拟玻璃比实际玻璃敏感的多,会使色差得到极有效的控制。在变焦设计中由变焦引入的约束很多,它们干扰了象质的优化,这成为了变焦系统是否设计成功的关键。如何使这些约束条件的违背在自动设计中越变越小,从而使系统校正能力转移到象差设计中来,框架原理指明了方向。没有任何这方面的系统论述,要花精力去探讨这个问题,这就是灵感的引导,使我及早找到了变焦设计深入下去的钥匙...。 真诚的希望各位朋友,通过学习,把握灵感产生的瞬间,去享受它给你代来的惊喜! 我在“Zemax的超级应用”一贴中,指出了将它作为计算器应用的重大意义。在“数码镜头设计原理”变焦篇中,将Zemax的这一功能用到光学设计的各个环节中,从中可以体会出它的强大功能,至于提高计算功能的效率和自动化程度,将有赖于ZPL (Zemax程序编辑语言)的介入。我正在学习,待有了深入了解后,将在“数码镜设计原理”的语言篇中介绍。 各位网友,下面是“数码镜头设计原理”变焦篇(1),这是入门教材,是根据 “ZEMAX_Tutorial(指导手册)”中关于变焦设计操作整理的,对用Zemax进行变焦设计还不熟习的同行有帮助。下面就是操作步骤与要点:
ZEMAX光学设计软件操作说明详解
【ZEMAX光学设计软件操作说明详解】 介绍 这一章对本手册的习惯用法和术语进行说明。ZEMAX使用的大部分习惯用法和术语与光学行业都是一致的,但是还是有一些重要的不同点。 活动结构 活动结构是指当前在镜头数据编辑器中显示的结构。详见“多重结构”这一章。 角放大率 像空间近轴主光线与物空间近轴主光线角度之比,角度的测量是以近轴入瞳和出瞳的位置为基准。 切迹 切迹指系统入瞳处照明的均匀性。默认情况下,入瞳处是照明均匀的。然而,有时入瞳需要不均匀的照明。为此,ZEMAX支持入瞳切迹,也就是入瞳振幅的变化。 有三种类型的切迹:均匀分布,高斯型分布和切线分布。对每一种分布(均匀分布除外),切迹因素取决于入瞳处的振幅变化率。在“系统菜单”这一章中有关于切迹类型和因子的讨论。ZEMAX也支持用户定义切迹类型。这可以用于任意表面。表面的切迹不同于入瞳切迹,因为表面不需要放置在入瞳处。对于表面切迹的更多信息,请参看“表面类型”这一章的“用户定义表面”这节。 后焦距 ZEMAX对后焦距的定义是沿着Z轴的方向从最后一个玻璃面计算到与无限远物体共轭的近轴像面的距离。如果没有玻璃面,后焦距就是从第一面到无限远物体共轭的近轴像面的距离。 基面 基面(又称叫基点)指一些特殊的共轭位置,这些位置对应的物像平面具有特定的放大率。基面包括主面,对应的物像面垂轴放大率为+1;负主面,垂轴放大率为-1;节平面,对应于角放大率为+1;负节平面,角放大率为-1;焦平面,象空间焦平面放大率为0,物空间焦平面放大率为无穷大。 除焦平面外,所有的基面都对应一对共轭面。比如,像空间主面与物空间主面相共轭,等等。如果透镜系统物空间和像空间介质的折射率相同,那么节面与主面重合。 ZEMAX列出了从象平面到不同象方位置的距离,同时也列出了从第一面到不同物方平面的距离。 主光线 如果没有渐晕,也没有像差,主光线指以一定视场角入射的一束光线中,通过入瞳中央射到象平面的那一条。注意,没有渐晕和像差时,任何穿过入瞳中央的光线也一定会通过光阑和出瞳的中心。 如果使用了渐晕系数,主光线被认为是通过有渐晕入瞳中心的光线,这意味着主光线不一定穿过光阑的中央。 如果有瞳面像差(这是客观存在的),主光线可能会通过近轴入 瞳中心(如果没有使用光线瞄准)或光阑中央(如果使用光线瞄准),但一般说来,不会同时通过二者中心。 如果渐晕系数使入瞳减小,主光线会通过渐晕入瞳中心(如果不使用光线瞄准)或者渐晕光阑中心(如果使用光线瞄准)。 常用的是主光线通过渐晕入瞳的中心,基本光线通过无渐晕的光阑中心。ZEMAX不使用基本光线。大部分计算都是以主光线或者中心光线作为参考。优先使用中心光线,因为它是基于所有照射到象面的光线聚合效应,而不是基于选择某一条特殊光线。
800 万像素手机镜头的zemax设计
800 万像素手机镜头的zemax设计2012.03.13 评论关闭 4,757 views 目录 [隐藏] , 1引言 , 2, 感光器件的选取 , 3, 设计指标 , 4, 设计思路 , 4.1,(, 材料选取 , 4.2,(, 初始结构选取 , 4.3,(, 优化过程 , 5, 设计结果 , 5.1,(, 光学调制传递函数 , 5.2,(, 点列图 , 5.3,(, 场曲和畸变 , 5.4,(, 色差和球差 , 5.5,(, 相对照度 , 6, 公差分析 , 7, 结论 随着手机市场对高像素手机镜头的需求增大,利用,,,,,光学设计软件设计一款大相对孔径,,,万像素的广角镜头。该镜头由,片非球面玻璃镜片,,片非球面塑料镜片,,片滤光镜片和,片保护玻璃构成。镜头光圈值,为,(,,,视场角,ω为,,?,焦距为,(,,,,,后工作距离为,(,,,。采用,,,,,, 公司的,,,,,,,型号,,,
万像素传感器,最大分辨率为,,,,×,,,,,最小像素为,(,μ,。设计结果显示:各视场的均方根差(,,,)半径小于,(,μ,,在奈奎斯特频率,,,处大多数视场的,,,值均大于,(,,畸变小于, ,,,, 畸变小于,(, ,。关键词:手机镜头;光学设计;,,,万像素;,,,,, 引言 手机镜头的研发工作始于,,世纪,,年代,世界上第一款照相手机是由夏普,,,,,,(现在的日本沃达丰)在,,,,年推出的,,,,,手机,它只搭载了一个,,万像素的,,,,数码相机镜头。随后各大手机知名制造厂商纷纷开始研发手机摄像功能。,,,,年,月,,日夏普制造了,,,万素的,,,,,,目前照相手机的市场占有率几乎是,,,,,特别是带有高像素,,、,,、,,、,, 的镜头就成为镜头研发的热点,,,。目前,,,万像素的手机市场占有率还不是太多,但随着人们对高端手机的需求量越来越大,,,,万像素手机肯定是主流趋势。鉴于此,在选用合理初始结构的基础上,优化出了一款,,,万像素的手机镜头。 , 感光器件的选取 感光器件有,,,(电荷耦合器件)和,,,,(互补金属氧化物半导体)两种。,,,,器 件产生的图像质量相比于,,,来说要低一些,到目前为止,大多数消费级别以及高端数码相机都使用,,,作为感光元件;,,,,感应器则作为低端产品 应用于一些摄像镜头上,目前随着,,,,技术的日益成熟,也有一些高端数码产品使用,,,,器件。,,,,相对于,,,有很多优点,比如价格低、集成化程度高、体积小、质量轻、功耗低、无光晕、高读出速率等,,,。所以很多手机生产商都采用,,,,器件作为手机镜头的图像传感器。目前,,,,芯片的尺寸越做越小,相应的像素尺寸也越来越小,分辨率反而越来越高。 现在国际上,,,,生产厂家主要有,,,,,,、,,,,,,,,,,、,,,,;,,、,,,,,,,等,本文采用,,,,,,公司的 ,,,,,,, 型号 ,(,,,,(,,,(,,,;,),该款传感器采用超低
800 万像素手机镜头的zemax设计
800 万像素手机镜头的zemax设计 2012.03.13 评论关闭4,757 views 目录 [隐藏] ?1引言 ?21感光器件的选取 ?32设计指标 ?43设计思路 ? 4.13.1材料选取 ? 4.23.2初始结构选取 ? 4.33.3优化过程 ?54设计结果 ? 5.14.1光学调制传递函数 ? 5.24.2点列图 ? 5.34.3场曲和畸变 ? 5.44.4色差和球差 ? 5.54.5相对照度 ?65公差分析 ?76结论 随着手机市场对高像素手机镜头的需求增大,利用Zemax光学设计软件设计一款大相对孔径800万像素的广角镜头。该镜头由1片非球面玻璃镜片,3片非球面塑料镜片,1片滤光镜片和1片保护玻璃构成。镜头光圈值F为2.45,视场角2ω为68°,焦距为4.25mm,后工作距离为0.5mm。采用APTINA公司的MT9E013型号800万像素传感器,最大分辨率为3264×2448,最小像素为1.4μm。设计结果显示:各视场的均方根差(RMS)半径小于1.4μm,在奈奎斯特频率1/2处大多数视场的MTF值均大于0.5,畸变小于2%,TV畸变小于0.3%。 关键词:手机镜头;光学设计;800万像素;Zemax 引言 手机镜头的研发工作始于20世纪90年代,世界上第一款照相手机是由夏普JPHONE(现在的日本沃达丰)在2001年推出的JSH04手机,它只搭载了一个11万像素的COMS数码相机镜头。随后各大手机知名制造厂商纷纷开始研发手机摄像功能。2003年5月22日夏普制造了100万素的JSH53,目前照相手机的市场占有率几乎是100%,特别是带有高像素2M、3M、5M、8M的镜头就成为镜头研发的热点[1]。目前800万像素的手机市场占有率还不是太多,但随着人们对高端手机的需求量越来越大,800万像素手机肯定是主流趋势。鉴于此,在选用合理初始结构的基础上,优化出了一款800万像素的手机镜头。 1感光器件的选取 感光器件有CCD(电荷耦合器件)和CMOS(互补金属氧化物半导体)两种。CMOS器件产生的图像质量相比于CCD来说要低一些,到目前为止,大多数消费级别以及高端数码相机都使用CCD作为感光元件;CMOS感应器则作为低端产品
ZEMAX光学设计讲义
实验一:单镜头设计(Singlet) 实验目的: 1、学习如何启用Zemax 2、学习如何输入波长(wavelength)、镜头数据(lens data) 3、学习如何察看系统性能(optical performance),如ray fan,OPD,点列图(spot diagrams), MTF等。 4、学习如何定义thickness solve以及变量(variables) 5、学习如何进行优化设计(optimization) 实验仪器:微机、zemax光学设计软件 实验步骤: 1、设计一个孔径为F/4的单镜头,物在光轴上,其焦距(focal length)为100mm,波长为可见光, 用BK7玻璃为材料。 2、首先运行ZEMAX,将出现ZEMAX的主页,然后点击lens data editor(LDE)。什么是LDE呢?它 是你要的工作场所,在LDE的扩展页上,可以输入选用的玻璃,镜片的radius,thickness,大小,位置等。 3、然后输入波长,在主菜单的system下,点击wavelengths,弹出波长数据对话框wavelength data, 键入你要的波长,在第一行输入0.486,它是以microns为单位,此为氢原子的F-line光谱。在第 二、三行键入0.587及0.656,然后在primary wavelength上点在0.587的位置,primary wavelength 主要是用来计算光学系统在近轴光学近似(paraxial optics,即first-order optics)下的几个主要参数,如focal length,magnification,pupil sizes等。 4、确定透镜的孔径大小。既然指定要F/4的透镜,所谓的F/#是什么呢?F/#就是光由无限远入射所形 成的effective focal length F跟paraxial entrance pupil的直径的比值。所以现在我们需要的aperture 就是100/4=25(mm)。于是从system menu上选general data,aperture type里选择entrance pupil,在apervalue上键入25,然后点击ok。 5、回到LDE,可以看到3个不同的surface,依序为OBJ,STO及IMA。OBJ就是发光物,即光源, STO即孔径光阑aperture stop的意思,STO不一定就是光照过来所遇到的第一个透镜,你在设计一组光学系统时,STO可选在任一透镜上,通常第一面镜就是STO,若不是如此,则可在STO这一栏上按鼠标,可前后加入你要的镜片,于是STO就不是落在第一个透镜上了。而IMA就是imagine plane,即成像平面。回到我们的singlet,我们需要4个面(surface),于是点击IMA栏,选取insert,就在STO后面再插入一个镜片,编号为2,通常OBJ为0,STO为1,而IMA为3。 6、输入镜片的材质为BK7。在STO列中的glass栏上,直接键入BK7即可。 7、孔径的大小为25mm,则第一镜面合理的thickness为4,在STO列中的thickness栏上直接键入4。 Zemax的默认单位是mm 8、确定第1及第2镜面的曲率半径,在此分别选为100及-100,凡是圆心在镜面之右边为正值,反之为 负值。再令第2面镜的thickness为100。
使用ZEMAX设计的典型实例分析
使用ZEMAX于设计、优化、公差和分析 摘要 光学设计软件ZEMAX的功能讨论可藉由使用ZEMAX去设计和分析一个投影系统来讨论,包括使用透镜数组(lenslet arrays) 来建构聚光镜(condenser)。 简介 ZEMAX以非序列性(non-sequential) 分析工具来结合序列性(sequential) 描光程序的传统功能,且为一套能够研究所有表面的光学设计和分析的整合性软件包,并具有研究成像和非成像系统中的杂散光(stray light) 和鬼影(ghosting) 的能力,从简单的绘图(Layout) 一直到优化(optimization)和公差分析(tolerance analysis)皆可达成。 根据过去的经验,对于光学系统的端对端(end to end)分析往往是需要两种不同的设计和分析工具。一套序列性描光软件,可用于设计、优化和公差分析,而一套非序列性或未受限制的(unconstrained) 描光软件,可用来分析杂散光、鬼影和一般的非成像系统,包括照明系统。 “序列性描光程序”这个名词是与定义一个光学系统为一连串表面的工具有关。所有的光线打到光学系统之后,会依序的从一个表面到另一个表面穿过这个系统。在定义的顺序上,所有的光线一定会相交到所有的表面,否则光路将终止。光线不会跳过任何中间的表面,且光线只能打在每一个已定义的表面一次。若实际光线路径交到一个表面上超过一次,如使用在二次描光(double pass) 中的组件,必须在序列性列表中,再定义超过一次的表面参数。
大部份成像光学系统,如照相机镜头、望远镜和显微镜,可在序列性模式中完整定义。对于这些系统,序列性描光具有许多优点:非常快、非常弹性和非常普遍。几乎任何形状的光学表面和材质特性皆可建构。在成像系统中,序列性描光最重要的优点为使用简单且高精确的方法来做优化和分析。序列性描光的缺点,包括无法追迹所有可能的光路径(即鬼影反射) 和许多无法以序列性方式来描述的光学系统或组件。 非序列性描光最常用来分析成像系统中的杂散光和鬼影,甚致分析照明和其它非成像系统。在非序列性描光中,光线入射到光学系统后,是自由的沿着实际光学路径追迹;一条光线可能打到一个对象(object) 许多次,而且可能完全未打到其它对象。此外,非序列性方法可用来分析从光学或机构组件产生的表面散射(scatter),以及从场内(in-field) 和场外(out-of-field) 的光源所产生的表面反射而形成的鬼影成像。 ZEMAX的功能 ZEMAX可以用于一个完全序列性模式中、一个完全非序性模式中和一个混合模式中,混合模式对分析具有大部分序列性而却有一些组件是作用在非序列性方式的系统,是相当有用的,如导光管(light pipes) 和屋顶棱镜(roof prisms)等。 序列性系统需定义视场角(field of view)、波长范围(wavelength range)和表面数据(surface date)。序列性设计的最重要参数之一,为系统孔径(system aperture)。系统孔径,常指入瞳(entrance pupil) 或孔径光栏(STO),它限制可从已定义视场入射光学系统的光线。光学表面可以是折射、反射或绕射。透镜可以是由均匀或渐变折射率材质所制成。表面的下弯(sag) 可以是球面、圆锥面(conic)、非球面(aspheric)或藉由多项式或其它参数函数
zemax设计实例之手机镜头汇编
zemax设计实例之手机镜头 2012.03.13 评论关闭4,757 views 随着手机市场对高像素手机镜头的需求增大,利用Zemax光学设计软件设计一款大相对孔径800万像素的广角镜头。该镜头由1片非球面玻璃镜片,3片非球面塑料镜片,1片滤光镜片和1片保护玻璃构成。镜头光圈值F为2.45,视场角2ω为68°,焦距为4.25mm,后工作距离为0.5mm。采用APTINA公司的MT9E013型号800万像素传感器,最大分辨率为3264×2448,最小像素为1.4μm。设计结果显示:各视场的均方根差(RMS)半径小于1.4μm,在奈奎斯特频率1/2处大多数视场的MTF值均大于0.5,畸变小于2%,TV畸变小于0.3%。 关键词:手机镜头;光学设计;800万像素;Zemax 引言 手机镜头的研发工作始于20世纪90年代,世界上第一款照相手机是由夏普JPHONE(现在的日本沃达丰)在2001年推出的JSH04手机,它只搭载了一个11万像素的COMS数码相机镜头。随后各大手机知名制造厂商纷纷开始研发手机摄像功能。2003年5月22日夏普制造了100万素的JSH53,目前照相手机的市场占有率几乎是100%,特别是带有高像素2M、3M、5M、8M的镜头就成为镜头研发的热点[1]。目前800万像素的手机市场占有率还不是太多,但随着人们对高端手机的需求量越来越大,800万像素手机肯定是主流趋势。鉴于此,在选用合理初始结构的基础上,优化出了一款800万像素的手机镜头。 1感光器件的选取 感光器件有CCD(电荷耦合器件)和CMOS(互补金属氧化物半导体)两种。CMOS器件产生的图像质量相比于CCD来说要低一些,到目前为止,大多数消费级别以及高端数码相机都使用CCD作为感光元件;CMOS感应器则作为低端产品应用于一些摄像镜头上,目前随着CMOS技术的日益成熟,也有一些高端数码产品使用CMOS器件。CMOS相对于CCD有很多优点,比如价格低、集成化程度高、体积小、质量轻、功耗低、无光晕、高读出速率等[6]。
zemax像差图分析讲解
ZEMAX像差深入以及像差各种图表分 析 初级像差深入 近轴光线和远轴光线的概念。 近轴光线和远轴光线都是指与光轴平行的光线,它们都成像在光轴上(下图中画的是主光轴情况)。缩小的光圈可以拦去远轴光线,而由近轴光线来成像。 总的来说,镜头的像差可以分成两大类,即单色像差及色差。镜头的单色像差五种,它们分别是影响成像清晰度的球差、彗差、象散、场曲,以及影响物象相似度的畸变。 以下就分别介绍五种不同性质的单色像差: 球差 是由于镜头的透镜球面上各点的聚光能力不同而引起的。从无穷远处来的平行光线在理论上应该会聚在焦点上。但是由于近轴光线与远轴光线的会聚点并不一致,会聚光线并不是形成一个点,而是一个以光轴为中心对称的弥散圆,这种像差就称为球差。球差的存在引起了成像的模糊,而从下图可以看出,这种模糊是与光圈的大小有关的。 小光圈时,由于光阑挡去了远轴光线,弥散圆的直径就小,图像就会清晰。大光圈时弥散圆直径就大,图像就会比较模糊。 必须注意,这种由球差引起的图像模糊与景深中的模糊完全是两会事,不可以混为一谈的。球差可以通过复合透镜或者非球面镜等办法在最大限度下消除的。在照相镜头中,光圈(孔径)数增加一档(光孔缩小一档),球差就缩小一半。我们在拍摄时,只要光线条件允许,可以考虑使用较小的光圈(孔径)来减小球差的影响。
彗差 是在轴外成像时产生的一种像差。从光轴外的某一点向镜头发出一束平行光线,经光学系统后,在像平面上并不是成一个点的像,而是形成不对称的弥散光斑,这种弥散光斑的形状象彗星,从中心到边缘拖着一个由细到粗的尾巴,首端明亮、清晰,尾端宽大、暗淡、模糊。这种轴外光束引起的像差就称为彗差。彗差的大小既与光圈(孔径)有关,也与视场有关。我们在拍摄时也可以采取适当采用较小的光圈(孔径)来减少彗差对成象的影响。 像散
基于ZEMAX的照相物镜的设计 推荐
燕山大学 课程设计说明书题目:基于ZEMAX的照相物镜设计 学院(系):电气工程学院 年级专业: 10级仪表三班 学号: 学生姓名: 指导教师: 教师职称:副教授
燕山大学课程设计(论文)任务书 院(系):电气工程学院基层教学单位:自动化仪表系 学号学生姓名专业(班级) 10级仪表三班设计题目 设 计技术参数 1、焦距:f’=15mm; 2、相对孔径:1/2.8; 3、在可见光波段设计(取d、F、C三种色光) 4、视场角2w=74° 设计要求 1、简述照相物镜的设计原理和类型; 2、确定照相物镜的基本性能要求,并确定恰当的初始结构; 3、输入镜头组数据,设置评价函数操作数,进行优化设计和像差结果分析; 4、给出像质评价报告,撰写课程设计论文 工作量 查阅光学设计理论和像差分析的相关文献和资料,提出并较好地的实施方案设计简单透镜组,并用zemax软件对初级像差进行分析和校正,从而对镜头进行优化设计 工作计划 第一天、第二天:熟悉ZEMAX软件的应用,查阅资料,确定设计题目进行初级理论设计 第三天、第四天:完善理论设计,运用ZEMAX软件进行设计优化,撰写报告 第五天:完善过程,进行答辩 参考资料《光学设计》,西安电子科技大学出版社,刘钧,高明,2006,10 《几何光学像差光学设计》,浙江大学出版社,李晓彤,岑兆丰,2003.11 《实用光学技术手册》,机械工业出版社,王之江,2007.1 指导教师签字基层教学单位主任 签字
目录 摘要 (1) 第一章简述照相物镜的设计原理和类型 (2) 第二章设计过程 (4) 2.1根据参数要求确定恰当的初始结构 (4) 2.2优化设计过程 (5) 2.3 优化结果像差结果分析 (8) 第四章课设总结 (13) 参考文献
zemax非顺序系设计教程
如何创建一个简单的非顺序系统 建立基本系统属性 我们将创造出一个带点光源的非序列系统,抛物面反射镜和一个平凸透镜镜头耦合成一个长方形光管灯,如下面的布局显示。 我们还将跟踪分析射线探测器获得光学系统中的各点照度分布。下面是我们最终将产生:
如果ZEMAX软件没有运行,启动它。 默认情况下,ZEMAX软件启动顺序/混合模式。要切换到纯非连续模式,运行ZEMAX软件,然后点击文件“>非序列模式。 一旦纯非连续模式,在编辑器窗口的标题栏将显示非连续组件编辑器而不是在连续模式时只用于连续或混合模式系统的镜头数据编辑。
对于本练习,我们会设置系统波长,点击系统>波长,指定波长0.587微米。 我们还将在系统设置单位,System>General /Unit tab “一般组标签如下(默认)(default).。
除辐射辐照装置单位如Watt.cm -2外,您可以指定光度和能源单位,如lumen.cm -2或joule.cm -2。我们将选择默认为这项工作辐射单位。 创建反射 按键盘上的“插入”(insert)插入几行非序列编辑器。 在设计的第一部分,我们将创建一个由抛物面反射镜准直的线光源。然后,我们将在+ Z上放置探测器对象和看光照在探测器上的分布。 建立第一个对象通过抛物面反射镜。在编辑器对象1列“对象类型”(Object type)双击(右击一下)下,打开对象的属性窗口。根据类型选项卡类型设置为标准的表面(Standard Surfauce),然后单击确定。
在编辑器,请在标准表面对象相应的地方列下列参数。对于某些参数,您可能需要滚动到编辑器的右方以看到标题列,显示所需参数的名称。 Material: Mirror Radius: 100 Conic: -1 (parabola抛物线) Max Aper: 150 Min Aper: 20 (center hole in the reflector在反射中心孔) 所有其他参数缺省 您可以通过“分析>布局”>NSC三维布局菜单,或NSC阴影模型(分析“布局”>NSC阴影模型)打开NSC 三维布局,看看反射镜样子。 创建源 更改对象#2类型(目前是空对象),在编辑器第2行重复前面的步骤并在属性窗口选择线光源(Source Filament)。
ZEMAX课程设计照相机物镜设计
ZEMAX课程设计——照相机物镜设计 一、 (课题的背景知识,如照相机镜头的发展概况,类型及其主要技术参数的简要说明) 二、课程设计题目 设计一个照相物镜, =30;;D/f=100mm;'2=1:3.5. 光学特性要求:1)f'2)成像质量要求:弥散斑直径小于0.05mm;倍率色差最好不超过0.01mm;畸变小于3%。 三、设计课题过程 1、参考Ernostar和Tessar联合型物镜设计相关数据,对其进行相关改进。 Ernostar和Tessar联合型物镜设计相关数据如下表1(其中焦距f'=75.68mm;相对孔径D /f'=1:2.4;视场角2ω=56) Radius/r Thickness/d 折射率/n 玻璃阿贝数/ν 表1 2、根据焦距曲率镜片厚度之间的比例关系,即f1/f2=r1/r2=d1/d2,得到焦距100mm,相对孔径D/f'=1:3.5的透镜数据如下表2。
表2 ,相关步骤由以下图给出LDE数据输入到1,将表ZEMAX、启动3. (1)打开ZEMAX。 (2)输入数据。 在主选单system下,圈出wavelengths,依喜好键入所要的波长,同时可选用不同波长,本实验中在第一列键入0.486,单位为microns,第二第三列分别键入0.587、0.656。在primary中点击选1,即用第一个波长为近轴波长。
(3)输入孔径大小。 由相对孔径为1:3.5,焦距为100mm得到,孔径D=100/3.5=28.57143mm。在主选单system 。 28.57143上键入aper value在general data,菜单中选 择. (4)输入视场角。
ZEMAX光学辅助设计简明教程 2
ZEMAX光学辅助设计简明教程 沈常宇 中国计量学院光电子技术研究所
目录 第一章引言 (3) 第二章ZEMAX的基本界面及文件菜单 (4) 第三章编辑菜单 (6) 第四章系统菜单 (12) 第五章分析菜单 (17) 第六章工具菜单 (29) 第七章报告菜单 (36) 第八章宏指令菜单 (38) 第九章扩展命令菜单 (39) 第十章表面类型简介 (40) 第十一章设计优化实例 (46) 第一章引言 对于实际的光学系统来说,它的成像往往是非完善成像,对于怎样来判断一个光学系统的性能的优劣,是光学设计中遇到的一个重要问题.在当前计算机辅助科研、教学的迅猛发展过程中,计算机辅助光学系统设计已成为光学设计不可缺少的一种重要手段.其中,由美国焦点软件公司所发展出的光学设计软件ZEMAX,可做光学组件设计与照明系统的照度分析,也可建立反射,折射,绕射等光学模型,并结合优化,公差等分析功能,是套可以运算Sequential及Non-Sequential的软件.其主要特色有分析:提供多功能的分析图形,对话窗式的参数选择,方便分析,且可将分析图形存成图文件,例如:*.BMP, *.JPG...等,也可存成文字文件*.txt;优化:表栏式merit function 参数输入,对话窗式预设merit function参数,方便使用者定义,且多种优化方式供使用者使用;公差分析:表栏式Tolerance参数输入和对话窗式预设Tolerance参数,方便使用者定义;报表输出:多种图形报表输出,可将结果存成图文件及文字文件. 但是,这里必须强调一点的是,ZEMAX软件只是一个光学设计辅助软件,也就是说,该软件不能教你怎么去进行光学设计,而只是能对你设计的光学系统进行性能的优化以达最佳成像质量.所以,在应用本教程进行光学辅助设计之前,您最好先学习一下光学设计的有关知识:首先是几何光学基础,几何光学是光学设计的基础.要做光学设计必须懂得各种光学仪器成像原理,外形尺寸计算方法,了解各种典型光学系统的设计方法和设计过程.实际光学系统大多由球面和平面构成.记住共轴球面系统光轴截面内光路计算的三角公式,了解公式中各参数的几何意义是必要的,具体公式可参考有关光学书籍,在此就不一一介绍了.对于平面零件有平面反射镜和棱镜,它们的主要作用多为改变光路方向,使倒像成为正像,或把白光分解为各种波长的单色光.在光学系统中造成光能损失的原因有三点:透射面的反射损失、反射面的吸收损失和光学材料内部的吸收损失.其次是像差理论知识,对于一个光学系统,一般存在7种几何像差,他们分别是球差、彗差、像散、场曲、畸变和位置色差以及倍率色差.另外,还必须了解一点材料的选择和公差的分配方面的知识,以及一些光学工艺的知识,包括切割,粗磨,精磨,抛光和磨边,最后还有镀膜和胶合等. 第二章 ZEMAX的基本界面及文件菜单 §2.1 ZEMAX的基本界面 ZEMAX的基本界面比较简单,如下图所示. 包括一系列文件菜单和工具按钮.以及一个镜头数据编辑对话框.
ZEMAX像差深入以及像差各种图表分析
ZEMAX像差深入以及像差各种图表分析 目录 [隐藏] ?1初级像差深入 o1.1球差 o1.2彗差 o1.3像散 o1.4场曲 o1.5畸变 ?2各种像差图表 o2.1初级球差大的点列图 o2.2初级球差大的垂轴像差 o2.3子午慧差大的情况 o2.4其慧差和垂轴色差大 初级像差深入 近轴光线和远轴光线的概念。 近轴光线和远轴光线都是指与光轴平行的光线,它们都成像在光轴上(下图中画的是主光轴情况)。缩小的光圈可以拦去远轴光线,而由近轴光线来成像。 总的来说,镜头的像差可以分成两大类,即单色像差及色差。镜头的单色像差五种,它们分别是影响成像清晰度的球差、彗差、象散、场曲,以及影响物象相似度的畸变。
以下就分别介绍五种不同性质的单色像差: 球差 是由于镜头的透镜球面上各点的聚光能力不同而引起的。从无穷远处来的平行光线在理论上应该会聚在焦点上。但是由于近轴光线与远轴光线的会聚点并不一致,会聚光线并不是形成一个点,而是一个以光轴为中心对称的弥散圆,这种像差就称为球差。球差的存在引起了成像的模糊,而从下图可以看出,这种模糊是与光圈的大小有关的。 小光圈时,由于光阑挡去了远轴光线,弥散圆的直径就小,图像就会清晰。大光圈时弥散圆直径就大,图像就会比较模糊。 必须注意,这种由球差引起的图像模糊与景深中的模糊完全是两会事,不可以混为一谈的。球差可以通过复合透镜或者非球面镜等办法在最大限度下消除的。在照相镜头中,光圈(孔径)数增加一档(光孔缩小一档),球差就缩小一半。我们在拍摄时,只要光线条件允许,可以考虑使用较小的光圈(孔径)来减小球差的影响。
彗差 是在轴外成像时产生的一种像差。从光轴外的某一点向镜头发出一束平行光线,经光学系统后,在像平面上并不是成一个点的像,而是形成不对称的弥散光斑,这种弥散光斑的形状象彗星,从中心到边缘拖着一个由细到粗的尾巴,首端明亮、清晰,尾端宽大、暗淡、模糊。这种轴外光束引起的像差就称为彗差。彗差的大小既与光圈(孔径)有关,也与视场有关。我们在拍摄时也可以采取适当采用较小的光圈(孔径)来减少彗差对成象的影响。
基于ZEMAX的手机摄像镜头设计
文章编号:100222082(2010)0120034205 基于ZEM A X 的手机摄像镜头设计 宋东王番,张 萍,王 诚,张韧剑,任兆玉,白晋涛 (西北大学光子学与光子技术研究所,陕西西安710069) 摘 要:在光学工程软件ZE M A X 的辅助下,配套采用像元大小为1.75Λm 的C M O S 图像传感器,设计了一款500万像素的手机镜头,镜头视场角60°,F #2.8,半像高2.87mm ,镜头总长为6mm ,镜头为3P 1G 结构,第1、3、4片镜片采用非球面塑料,第2片镜片采用球面透镜。各个视场的横向像差均小于20Λm ,均方根半径(RM S R adiu s )都在艾利斑之内,在1 2奈奎斯特频率处绝大部分视场M T F 值都大于0.6,可以获得优质的成像效果。 关键词:手机镜头;ZE M A X ;500万像素;调制传递函数;像差校正 中图分类号:TN 942.2;O 439 文献标志码:A D esign of m ob ile phone cam era len s ba sed on Z E M AX SON G Dong 2fan ,ZHAN G P ing ,W AN G Cheng ,ZHAN G R en 2jian , R EN Zhao 2yu ,BA I J in 2tao (Institute of Pho tonics &Pho to T echno logy ,N o rthw est U niversity ,X i ’an 710069,Ch ina ) Abstract :B y the aid of op tical engineering softw are ZE M A X ,a five m ega p ixel m ob ile phone cam era len s m atched w ith one C M O S i m age sen so r of 1.75Λm p ixel size w as designed ,w ho se FOV is 60° ,F num ber is 2.8,half i m age heigh t is 2.87mm ,to tal length is 6mm and structu re is 3P 1G .A spheric p lastic w as u sed fo r the first ,th ird and fou rth len ses .Sphere glass w as u sed fo r the second len s .T ran sverse aberrati on of all the FOV s is less than 20Λm ,RM S radiu s are less than A iry disk ,and M T F s of m o st FOV s at half the N yqu ist frequency (285lp mm )of C M O S are greater than 0.6.T h is len s assem b ly has an excellen t i m aging p erfo r m ance .Key words :m ob ile phone len s ;ZE M A X ;5m ega 2p ixel cam era ;M T F ;aberrati on co rrecti on 引言 从手机开始配备拍照功能以来,手机摄像头的像素以很快的速度上涨,从最初的10万像素到30万像素、100万像素、200万像素、300万像素、500万像素,再到现在的800万像素,1000万像素。09年6月三星推出了全球首款1200万像素手机 P ixon 12(M 8910)[1] ,采用1200万像素C M O S 图像传感器及28mm 广角镜头,提供了足以媲美数码相机的拍照等多项功能,可见手机大有将时尚卡片DC 取而代之的劲头。不过据调查,虽然像素一直 在涨,但是500万以上像素手机由于价格比较高,市场占有率很低,现在200万像素和300万像素仍是摄像手机市场主流,而500万像素的市场增长速度已显著增加。本文在合理选取初始结构的基础上,优化设计了一款500万像素的手机镜头。 1 镜头结构的设计指标 现在市场上,手机镜头的视场在60°左右,F #约为2.8,由于手机的小型化体积,使得镜头总长有一定限制,一般要小于1c m ,照相物镜的视场角和 收稿日期:2009208227; 修回日期:2009211205 基金项目:陕西省重大科技创新项目(2008ZKC 01214);西北大学研究生科研实验类项目(09YSY 14)作者简介:宋东王番(1986-),女,陕西大荔人,西北大学光子学与光子技术研究所硕士研究生,主要从事光学设计和固体激光器方面的研究。E 2m ail :songdf 2003@yahoo .com .cn 第31卷第1期2010年1月 应用光学Journal of A pp lied Op tics V o l .31N o.1 Jan .2010
zemax_课程设计报告书
目录 第一章引言 (1) 第二章镜头结构的设计指标 (2) 2.1相关规格的确定 (2) 2.2镜头总像素与COMS像素的匹配 (2) 2.3透镜材料及结构的选择 (2) 2.4材料的厚度 (3) 2.5 设计指标 (3) 第三章 zemax软件 (3) 3.1 zemax软件简介 (3) 3.1.1软件特色 (4) 3.2zemax软件界面介绍 (4) 3.2.1 Lens Data Editor(LDE) (4) 3.2.2 Aperture(光圈) (5) 3.2.3 Wavelength Data(波长设定) (5) 3.3 zemax软件功能简介 (6) 第四章 500万像素手机镜头设计 (6) 4.1初始结构选择 (6) 4.1.1 500万像素手机镜头4P专利结构简介 (7) 4.2设计结果 (7) 4.2.1光路图 (7) 4.2.2详细参数 (8) 第五章结果分析,误差调试 (9) 5.1误差调试 (9) 5.2优化后的分析 (10) 5.2.1场曲和畸变 (10) 5.2.2球差 (10) 5.2.3.色差 (11) 5.2.4 RMS Radius(均方根半径) (12) 5.2.5 MTF(光学调制传递函数) (13) 5.2.6 本设计达到指标 (14) 第六章结论 (15) 参考文献 (16)
第一章引言 从手机开始配备拍照功能以来,手机摄像头的像素以很快的速度上涨,从最初的10万像素到30万像素、100万像素、200万像素、300万像素、500万像素,再到现在的800万像素,1000万像素。09年6月三星推出了全球首款1200万像素手机Pixonl2(M8910),采用1200万像素CMOS图像传感器及289mm广角镜头,提供了足以媲美数码相机的拍照等多项功能,可见手机大有将时尚卡片DC取而代之的劲头。不过据调查,虽然像素一直在涨,但是500万以上像素手机由于价格比较高,市场占有率很低,现在200万像素和300万像素仍是摄像手机市场主流,而500万像素的市场增长速度已显著增加。本文在合理选取初始结构的基础上,优化设计了一款500万像素的手机镜头,本设计流程图如图一。 图1 手机镜头设计流程图